Anti-Saturation Control of Uncertain Time-Delay Systems with Actuator Saturation Constraints

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
- (1)
- (2)
- (3)
3. Main Results
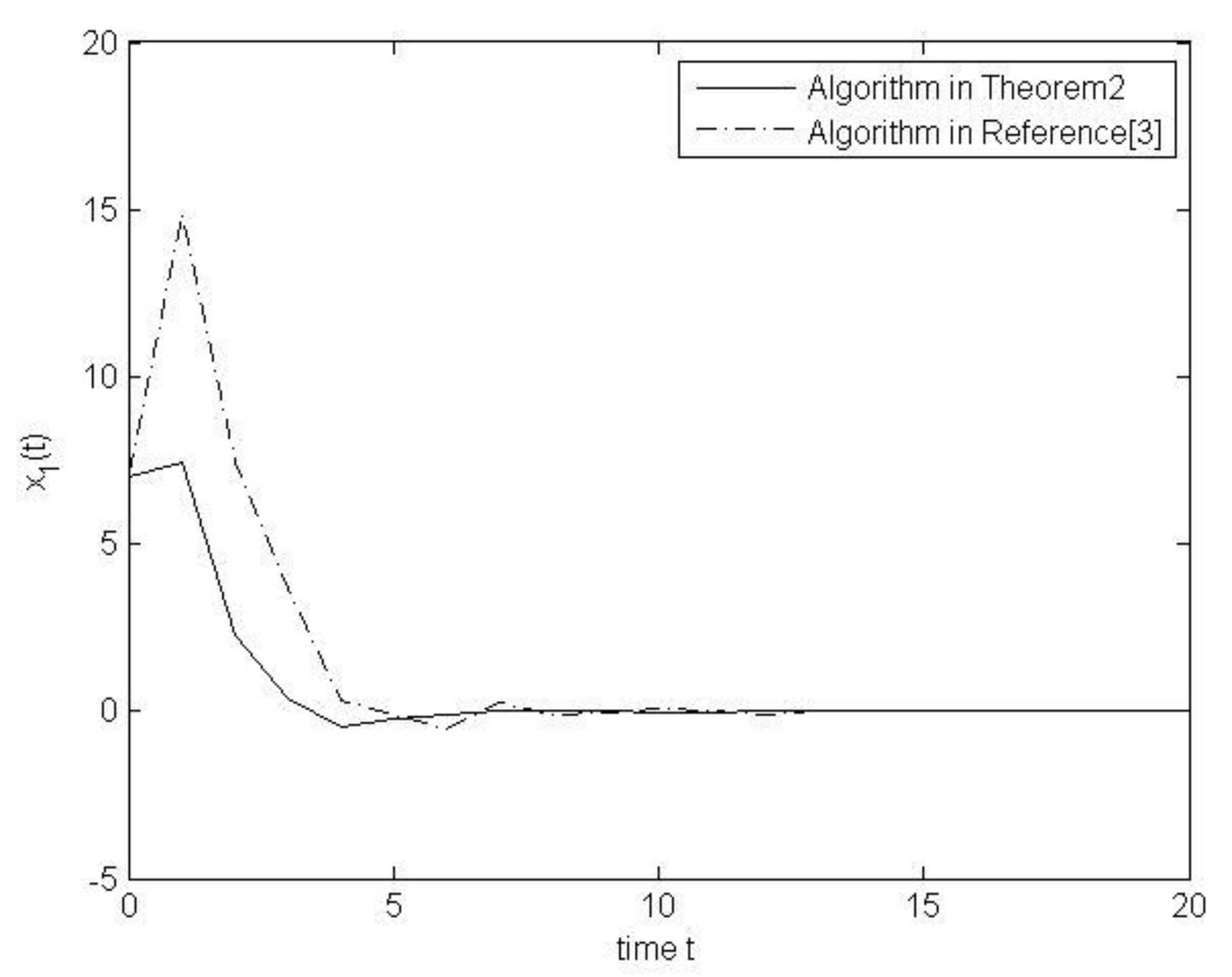
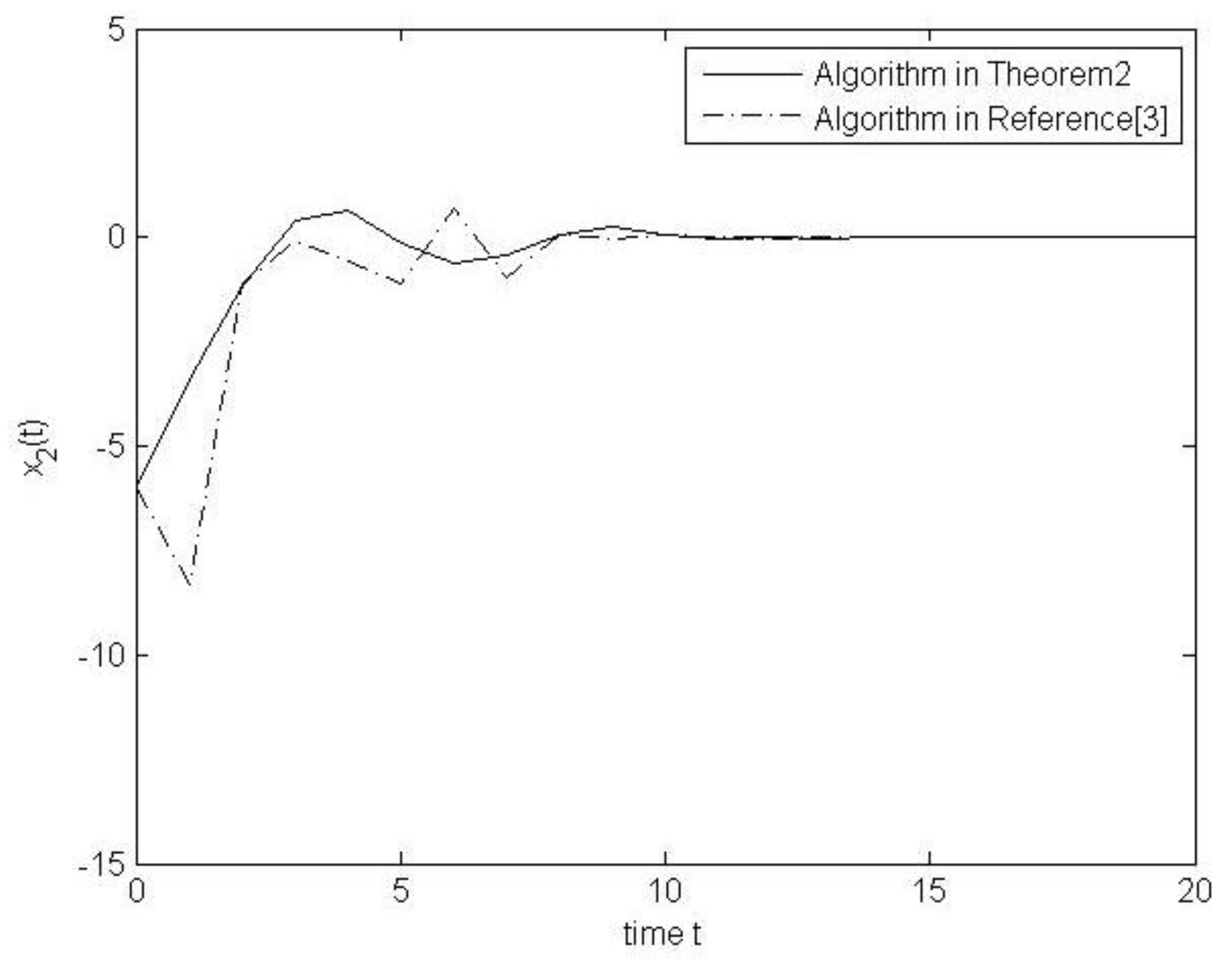
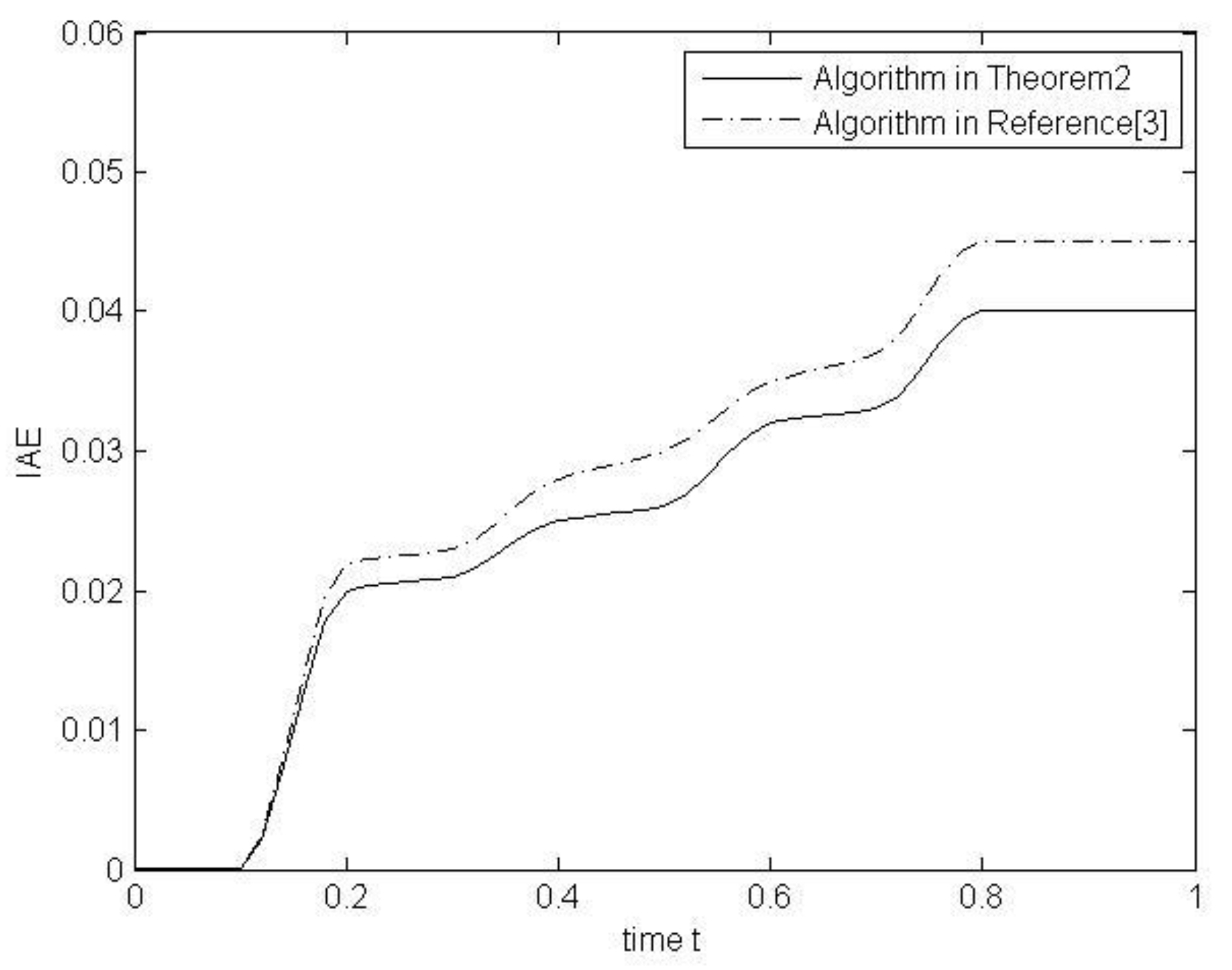
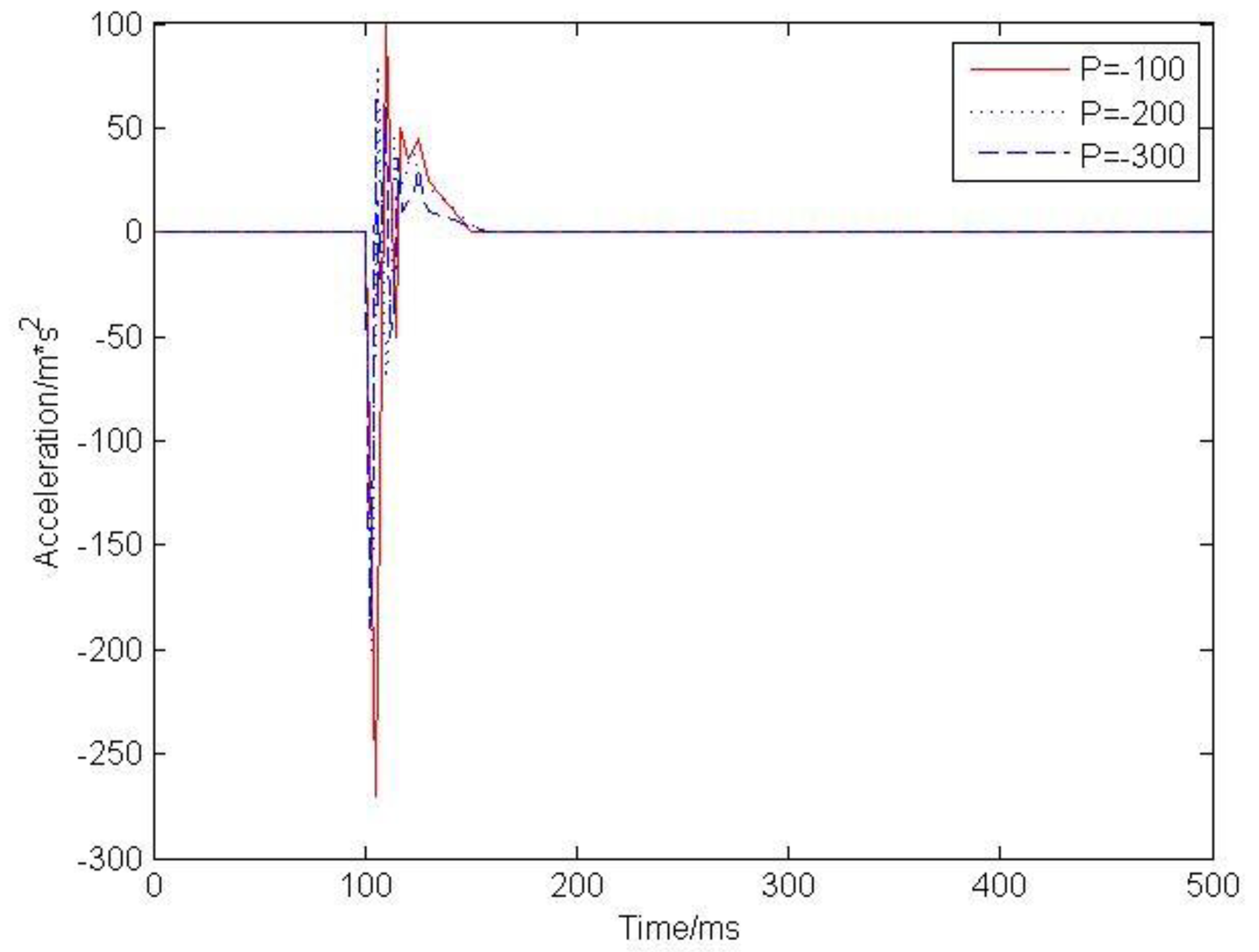
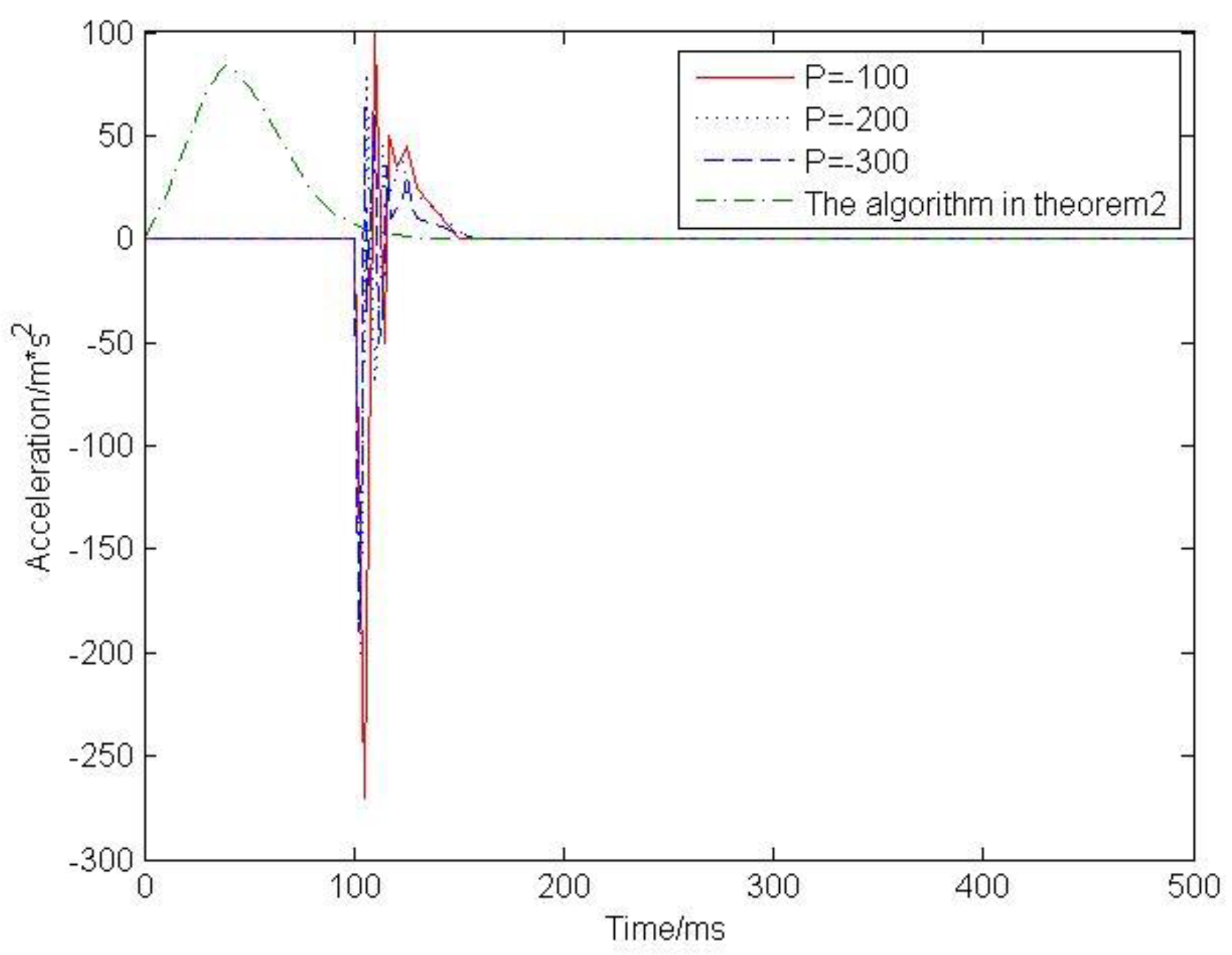
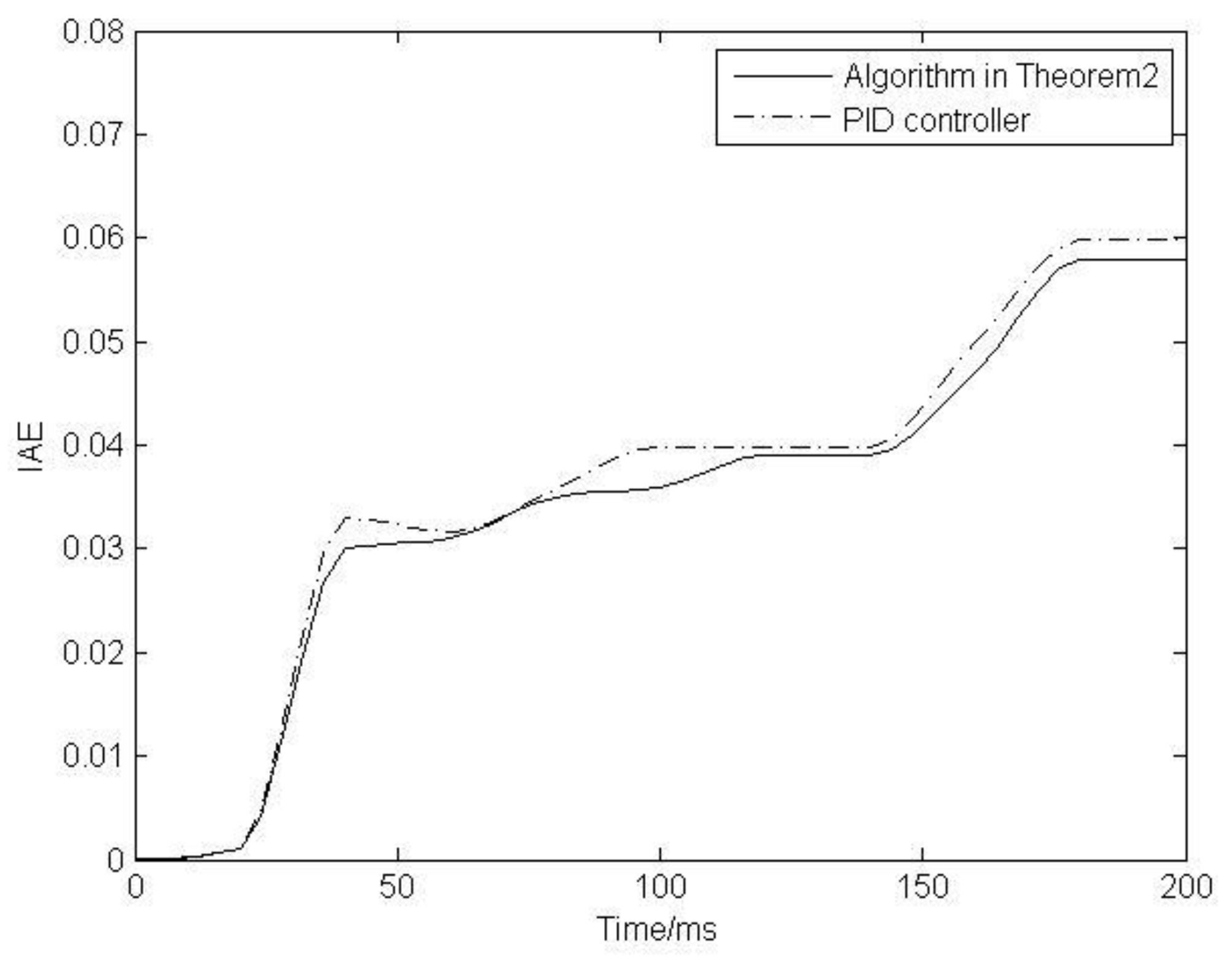
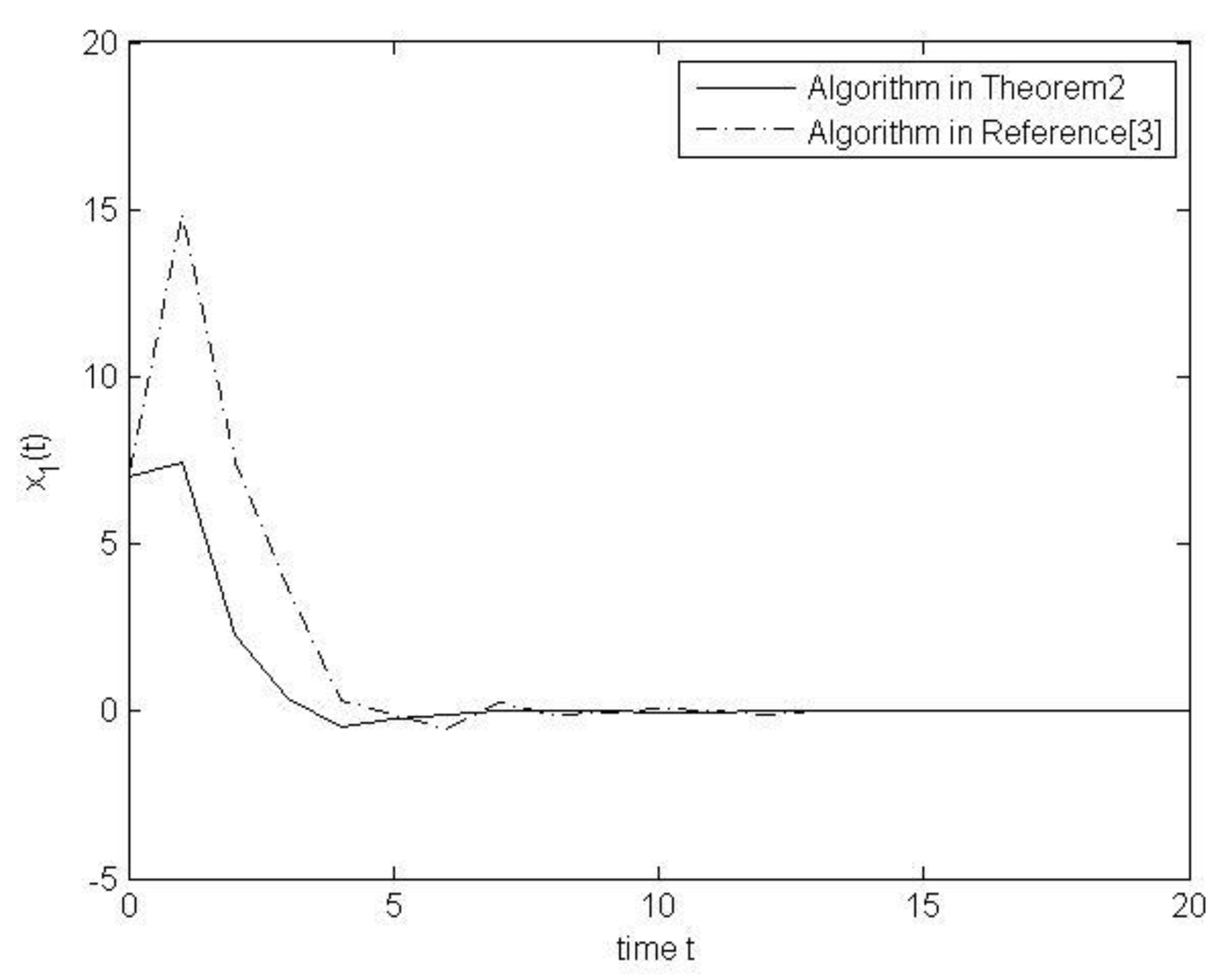
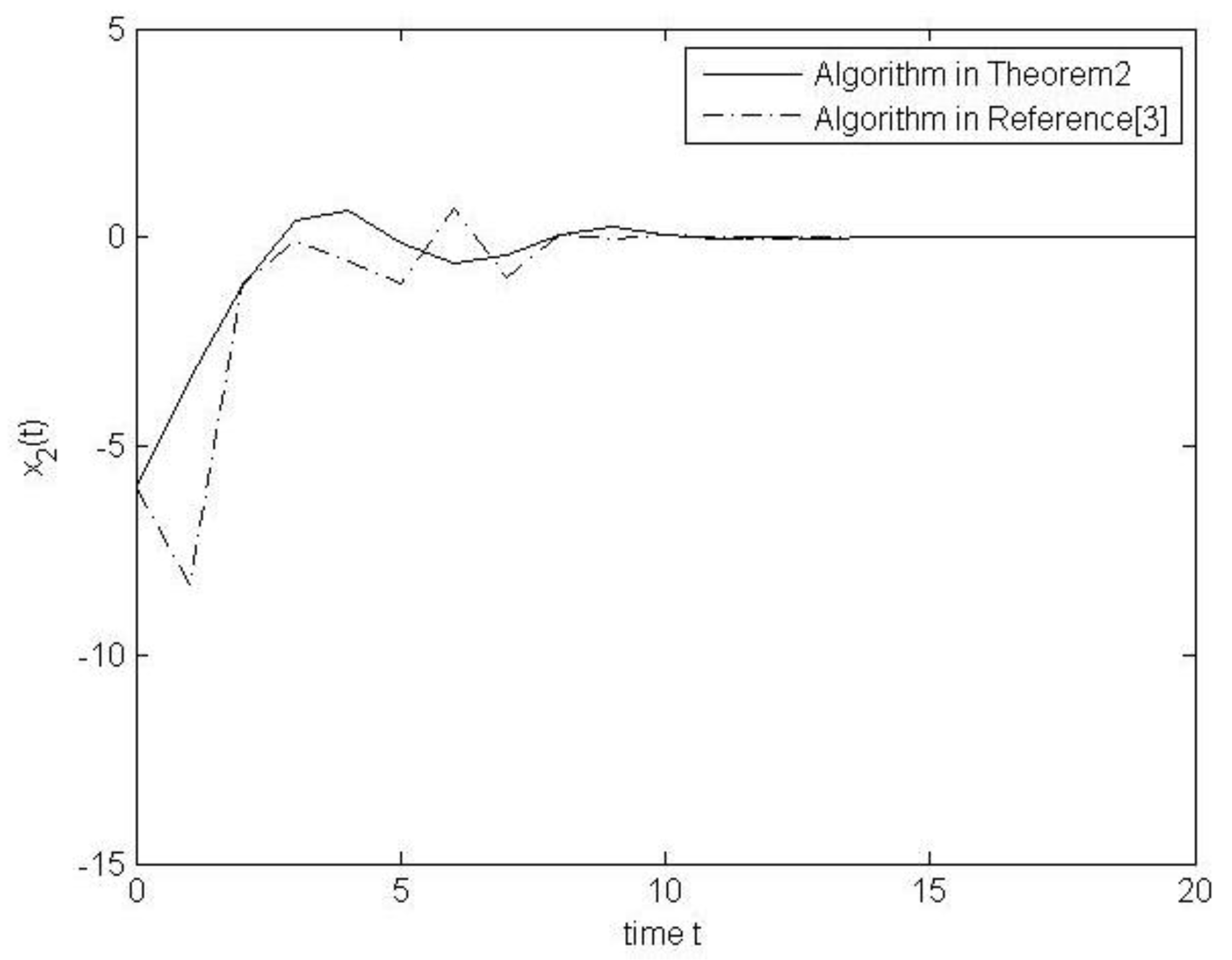
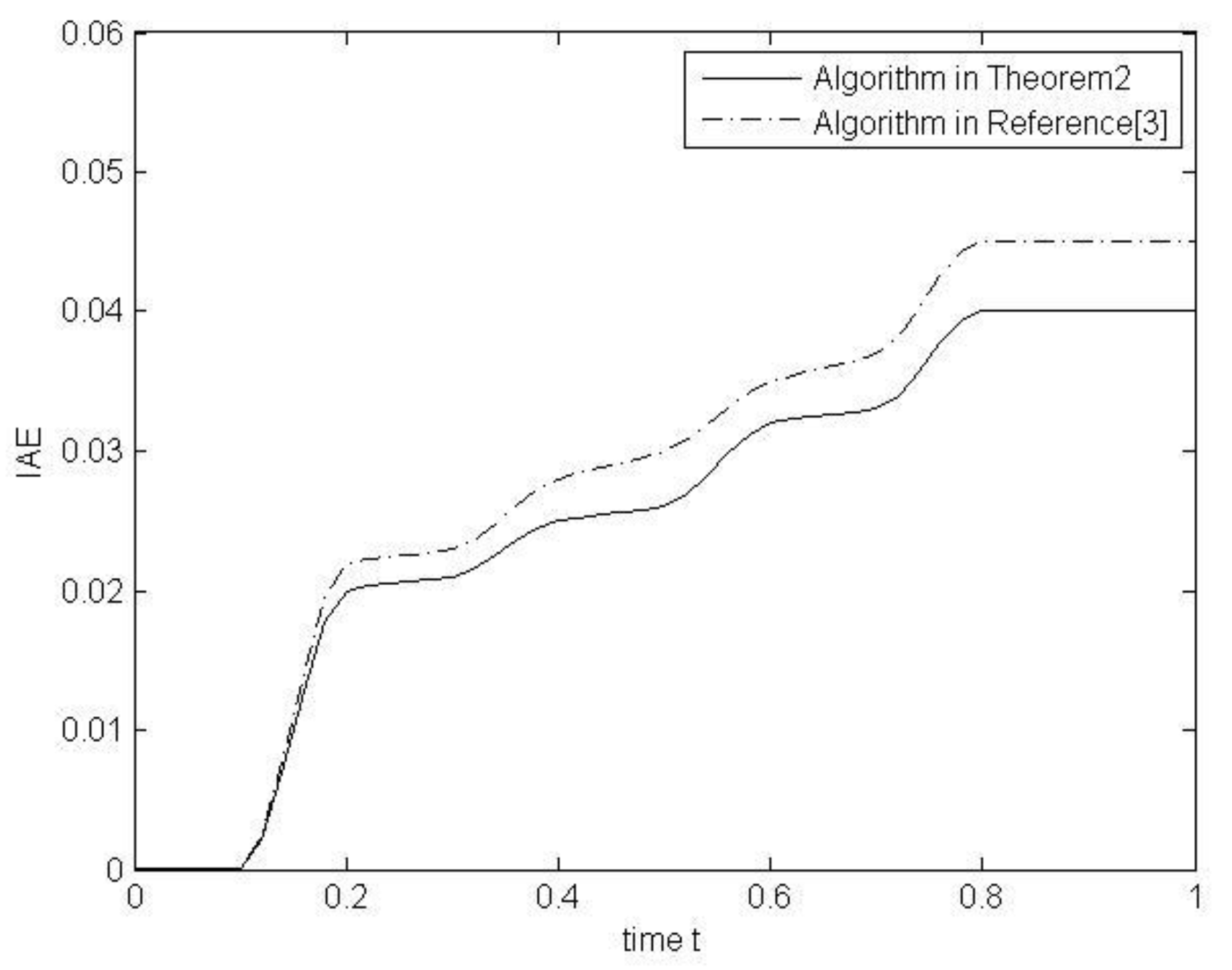
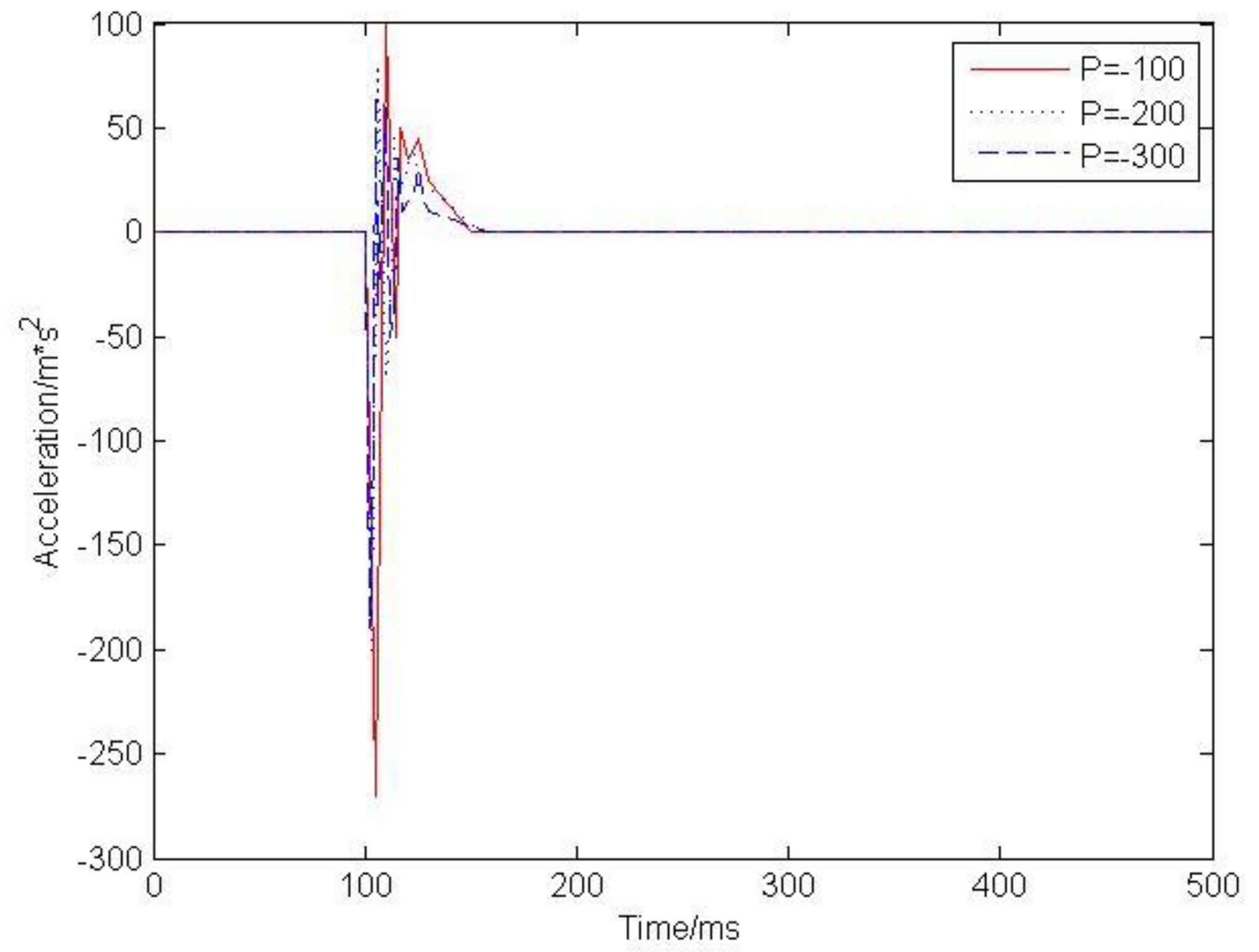
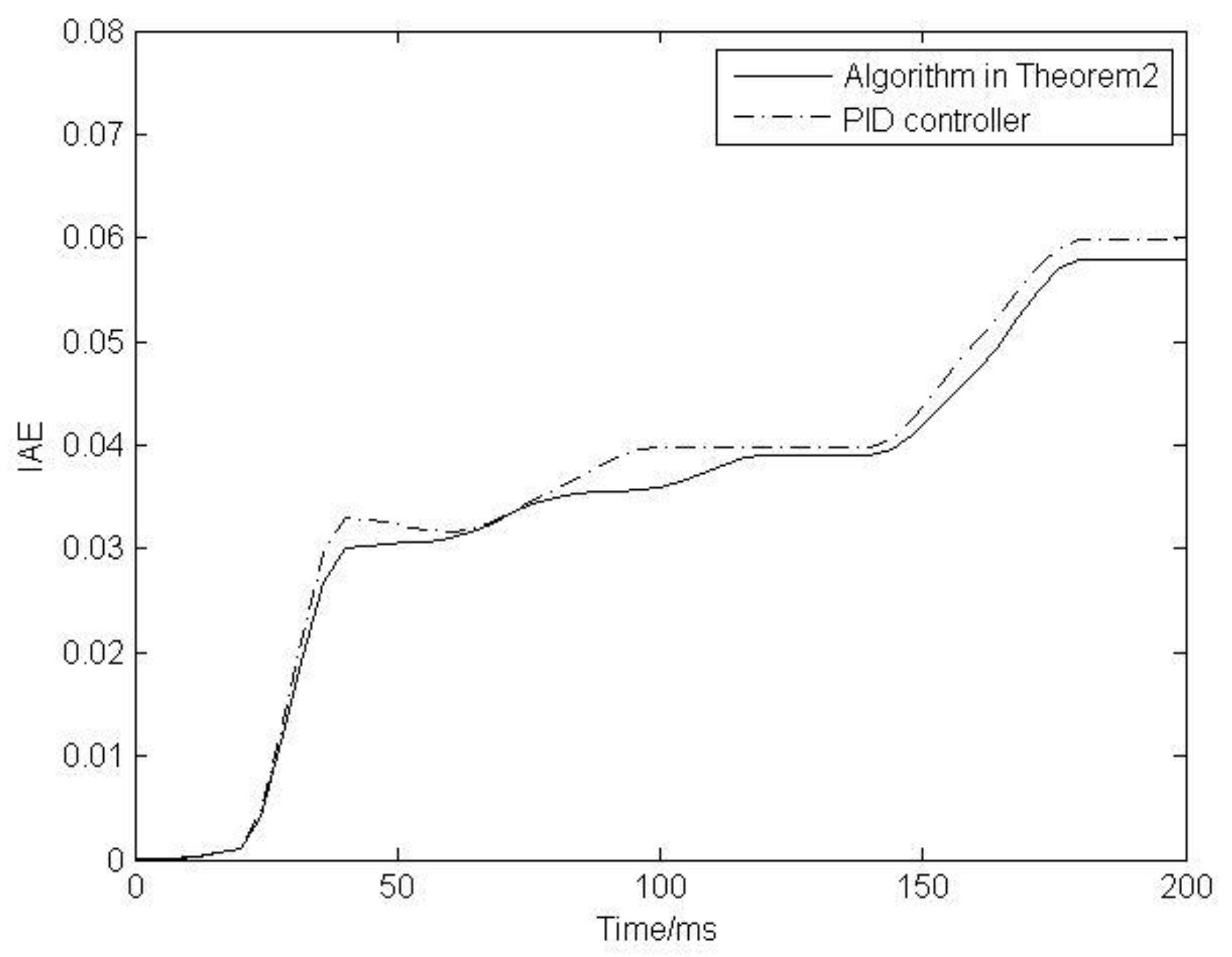
4. Simulation Examples
5. Conclusions
Funding
Conflicts of Interest
References
- Fuller, A.T. In the large stability of relay and saturating control systems with linear controllers. Int. J. Control 1969, 10, 457–480. [Google Scholar] [CrossRef]
- Wang, C.L. Semi-global practical stabilization of nonholonomic wheeled mobile robots with saturated inputs. Automatica 2008, 44, 816–822. [Google Scholar] [CrossRef]
- Joao, M.; Gomes, D.; Silva, J.; Sophie, T.; Germain, G. Anti-windup design for time-delay systems subject to input saturation an LMI-based approach. Eur. J. Control 2006, 12, 622–634. [Google Scholar]
- Hu, T.; Lin, Z.; Chen, B.M. Analysis and design for discrete-time linear systems subject to actuator saturation. Syst. Control Lett. 2002, 45, 97–112. [Google Scholar] [CrossRef]
- Zhou, R.; Zhang, X.; Shi, G. Output feedback stabilization of networked systems subject to actuator saturation and packet dropout. Lect. Notes Electr. Eng. 2012, 136, 149–154. [Google Scholar]
- Zhao, L.; Xu, H.; Yuan, Y.; Yang, H. Stabilization for networked control systems subject to actuator saturation and network-induced delays. Neurocomputinng 2017, 267, 354–361. [Google Scholar] [CrossRef]
- Song, Y.; Fang, X. Distributed model predictive control for polytopic uncertain system with randomly occurring actuator saturation and package losses. IET Control Theory Appl. 2014, 8, 297–310. [Google Scholar] [CrossRef]
- Chen, Y.; Fei, S.; Li, Y. Stabilization of neutral time-delay systems with actuator saturation via auxiliary time-delay feedback. Automatica 2015, 52, 242–247. [Google Scholar] [CrossRef]
- Zhou, B. Analysis and design of discrete-time linear systems with nested actuator saturations. Syst. Control Lett. 2013, 62, 871–879. [Google Scholar] [CrossRef]
- Zhang, L.; Boukas, E.; Haidar, A. Delay-range-dependent control synthesis for time-delay systems with actuator saturation. Automatica 2008, 44, 2691–2695. [Google Scholar] [CrossRef]
- Ma, Y.; Jia, X.; Zhang, Q. Robust observer-based finite-time H control for discrete-time singular Markovian jumping system with time delay and actuator saturation. Nonlinear Anal. Hybrid Syst. 2018, 28, 1–22. [Google Scholar] [CrossRef]
- Ma, Y.; Jia, X.; Zhang, Q. Robust finite-time non-fragile memory H control for discrete-time singular Markovian jumping systems subject to actuator saturation. J. Frankl. Inst. 2017, 354, 8256–8282. [Google Scholar] [CrossRef]
- Qi, W.; Kao, Y.; Gao, X.; Wei, Y. Controller design for time-delay system with stochastic disturbance and actuator saturation via a new criterion. Appl. Math. Comput. 2018, 320, 535–546. [Google Scholar] [CrossRef]
- Song, G.; Lam, J.; Xu, S. Quantized feedback stabilization of continuous time-delay systems subject to actuator saturation. Nonlinear Anal. Hybrid Syst. 2018, 30, 1–13. [Google Scholar] [CrossRef]
- Tao, Y.; Wei, H.; Zhao, Y. A dynamic allocation strategy of bandwidth of networked control systems with bandwidth constraints. Adv. Inf. Manag. Commun. Electron. Autom. Control 2017, 25, 1153–1158. [Google Scholar]

© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, H. Anti-Saturation Control of Uncertain Time-Delay Systems with Actuator Saturation Constraints. Symmetry 2019, 11, 375. https://doi.org/10.3390/sym11030375
Yao H. Anti-Saturation Control of Uncertain Time-Delay Systems with Actuator Saturation Constraints. Symmetry. 2019; 11(3):375. https://doi.org/10.3390/sym11030375
Chicago/Turabian StyleYao, Hejun. 2019. "Anti-Saturation Control of Uncertain Time-Delay Systems with Actuator Saturation Constraints" Symmetry 11, no. 3: 375. https://doi.org/10.3390/sym11030375
APA StyleYao, H. (2019). Anti-Saturation Control of Uncertain Time-Delay Systems with Actuator Saturation Constraints. Symmetry, 11(3), 375. https://doi.org/10.3390/sym11030375