Cooperative and Delay Minimization Routing Schemes for Dense Underwater Wireless Sensor Networks

 ,
,  , , ,
, , ,
Abstract
:1. Introduction
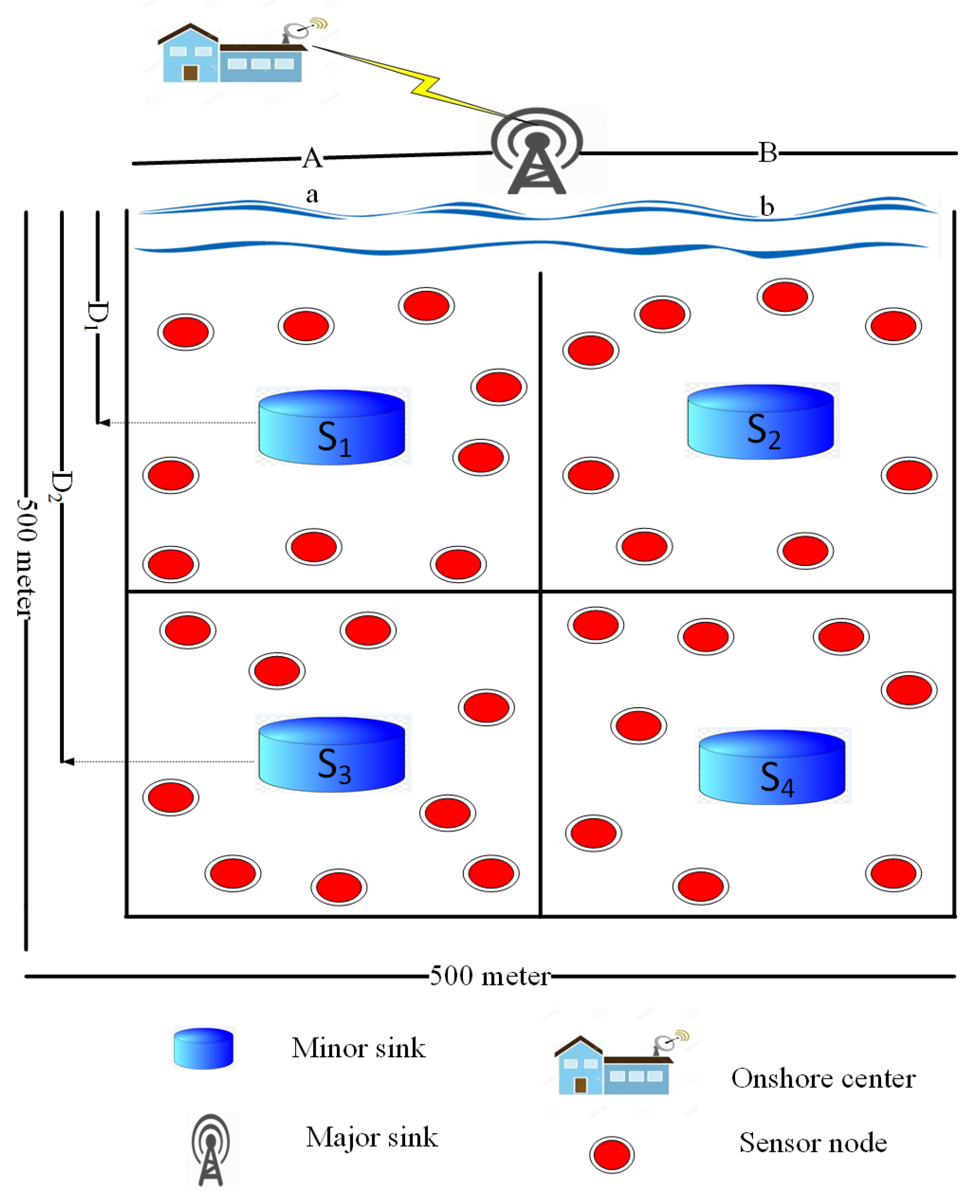
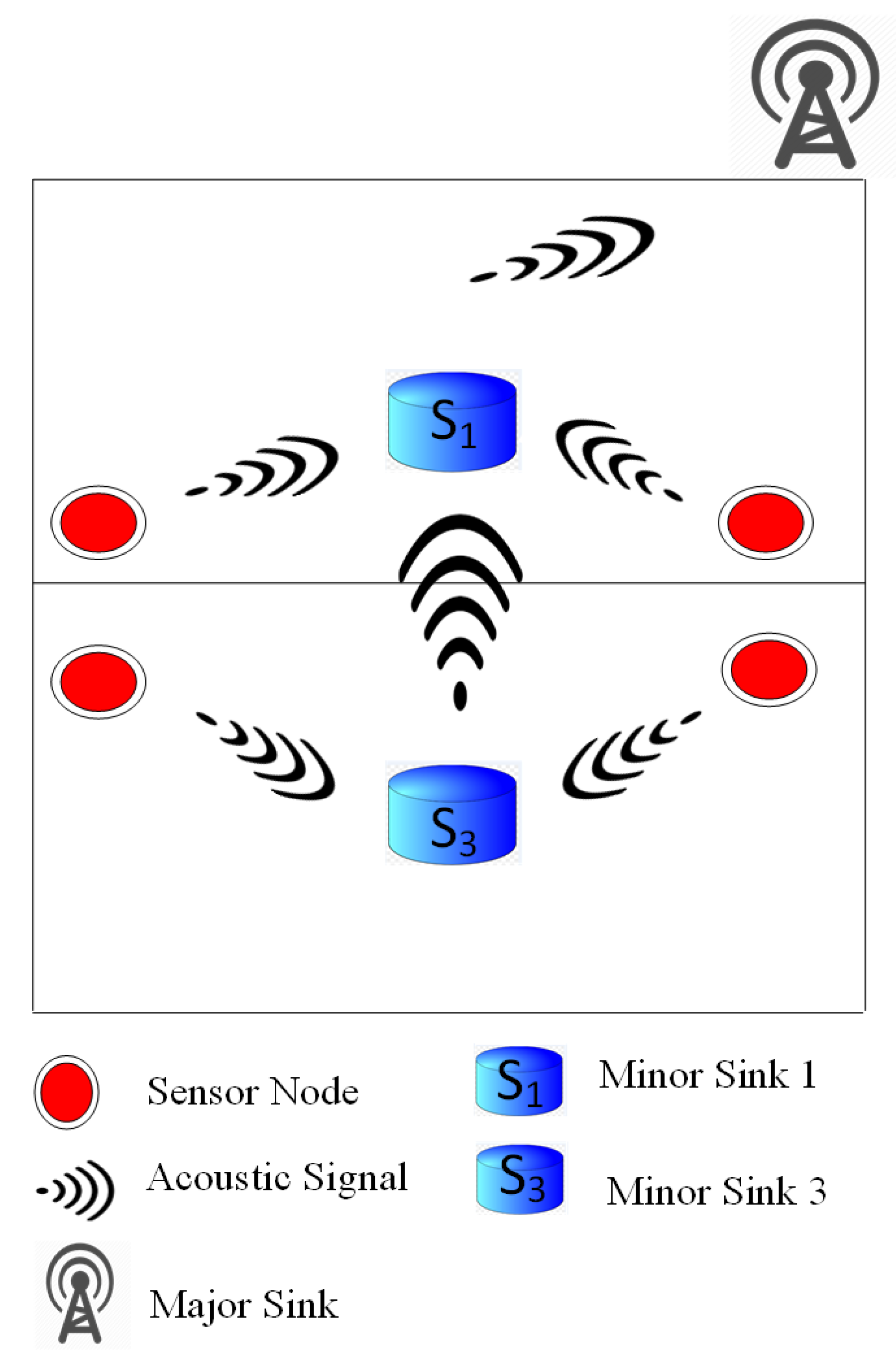
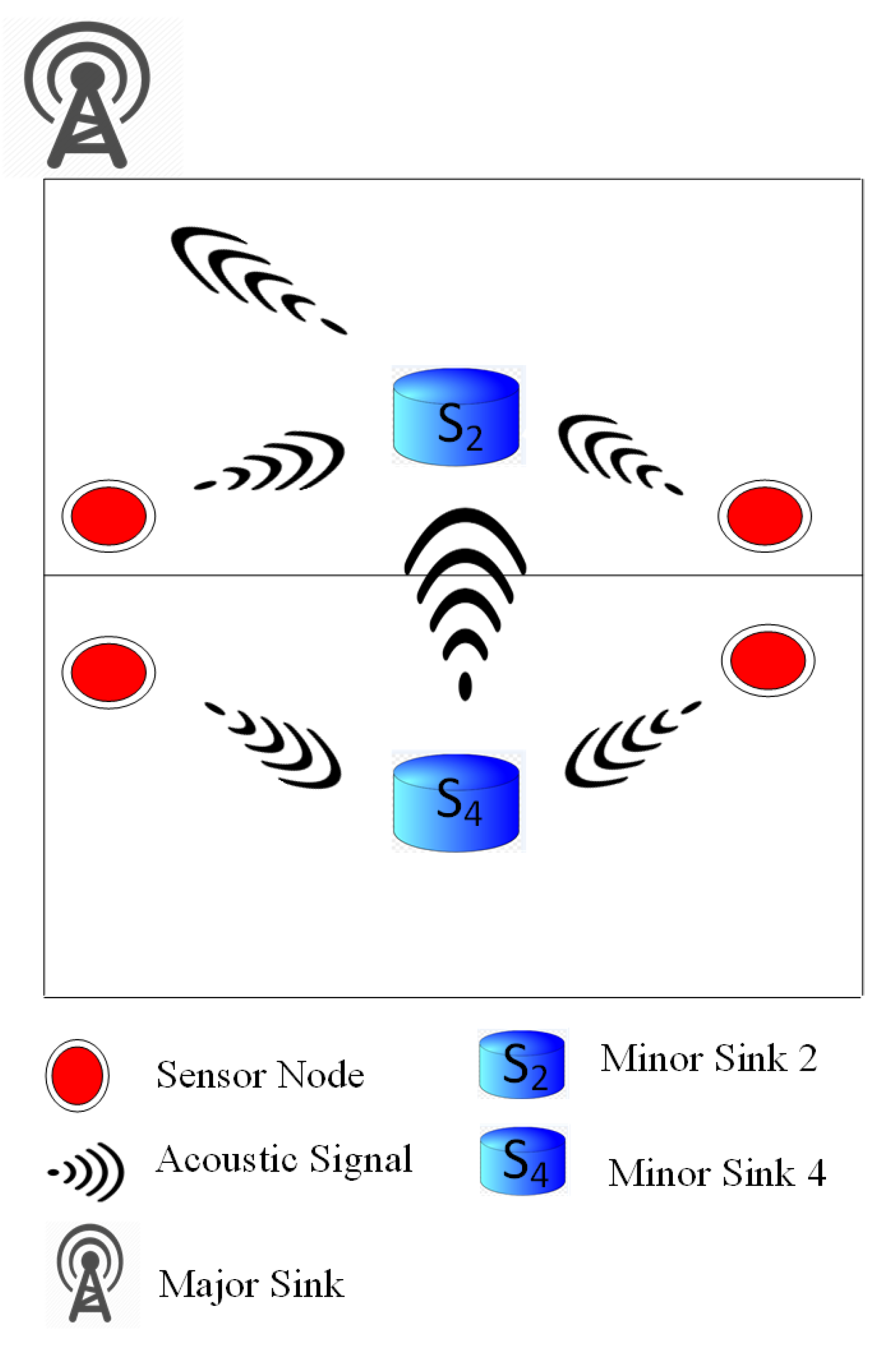
- For delay minimization in dense underwater WSNs, the DMR scheme is designed in which the whole network is divided into four balanced zones. Four sink nodes are placed at the center of all zones, one node at the center of each zone. Placing sink nodes at the center of each zone reduces latency during information broadcasting, as packets do not have to follow the complete journey towards sea surface. Unlike the existing schemes, the DMR scheme reduces the path length for information transmission to the desired sink node. Information packets take minimum interval of time to reach the targeted major sink node as compared to other schemes. The DMR also copes with the problem of data traffic on the desired sink node, which is caused by the information flooding over the upper major sink node. This further causes packets congestion and drop. In each region, the sink node secures the information of the nodes, which are then transmitted to the major sink node. This balances transmission of information packets and reduces the packet traffic on the major sink node. It also avoids the problem of packet collision. The information flow from sink nodes towards the top sink node in different intervals of time ensures the steady traffic of information packets. DMR offers lower delay and energy consumption in packets advancement than some prevailing protocols as supported by simulation.
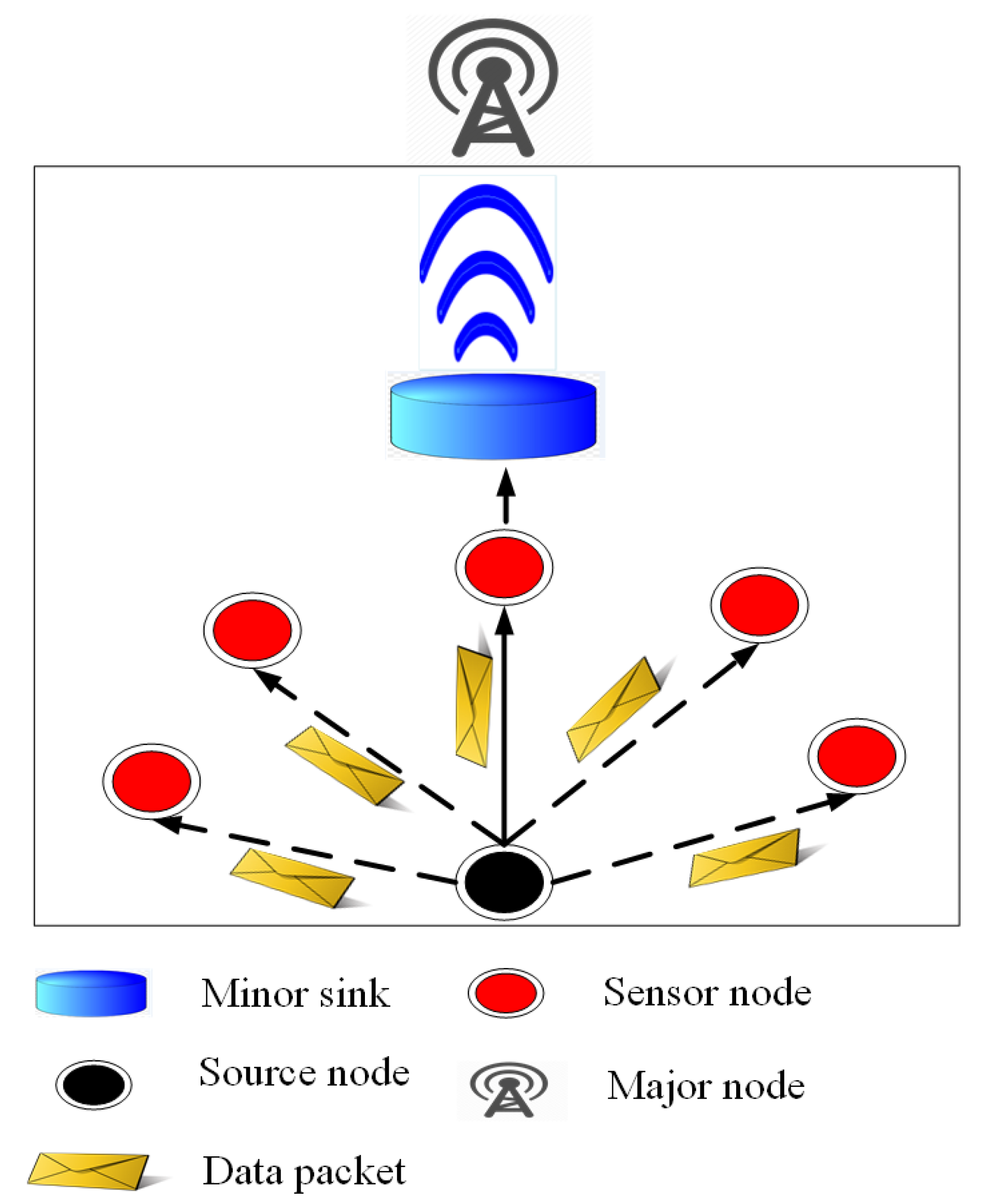
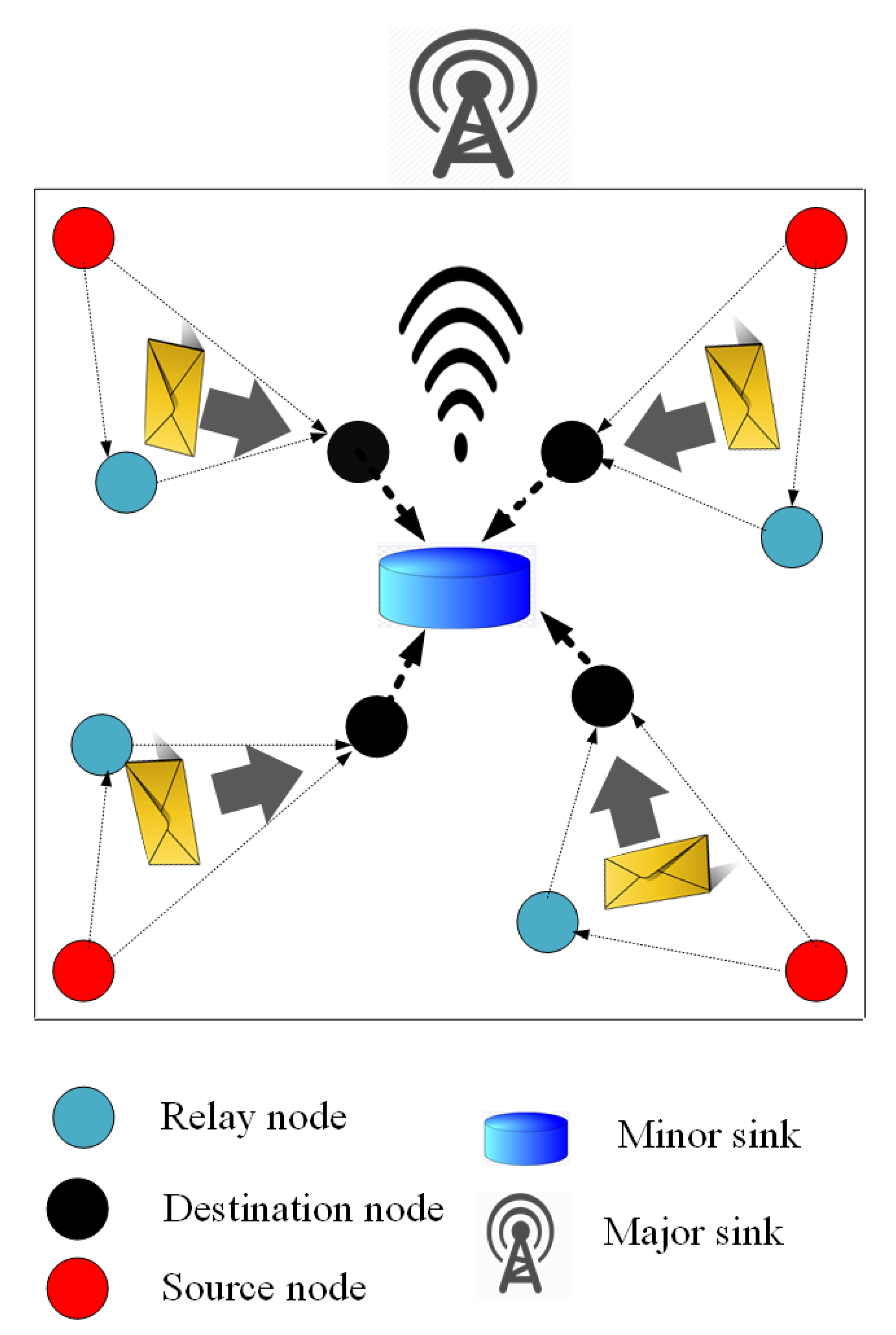
- Packets are sent in DMR over a single link, which may not be reliable always as sea channel is very fluctuating. Therefore, to improving information bags reliability in DMR, cooperative routing is introduced making it CoDMR protocol. In CoDMR, all nodes that cannot directly forward information bags to minor sinks due to limited range, use the destination and relay nodes. A destination node is at lowest physical distance regarding the sink and a relay node is at the second lowest physical distance with respect to the sink. The destination requests the relay for information transmission when the BER of information is above a specific threshold. The destination uses fixed combining technique to decide about the quality of the data and further transmission of information bags. CoDMR is more reliable than some prevailing protocols in packets reliability as supported by simulation results.
- The distance calculation is based on timer operation and does not use geographical coordinates as are usually required. In addition, unlike the conventional approach, placement of minor sink nodes is independent of the geographical position of the sink nodes, as obtaining this knowledge is really challenging in sea environment due to ocean currents and limited resources. These strategies make the DMR and CoDMR schemes easy to operate and time efficient with less complexity as compared to geographical coordinates based protocols.
2. Literature Review
3. Proposed Schemes
3.1. Delay Minimization Routing (DMR) Scheme
3.1.1. Network Initialization:
3.1.2. Neighbour Identification and Path Setup
3.1.3. Best Forwarder Node Selection and Information Transition
3.2. Cooperative Delay Minimization Routing (CoDMR) Scheme
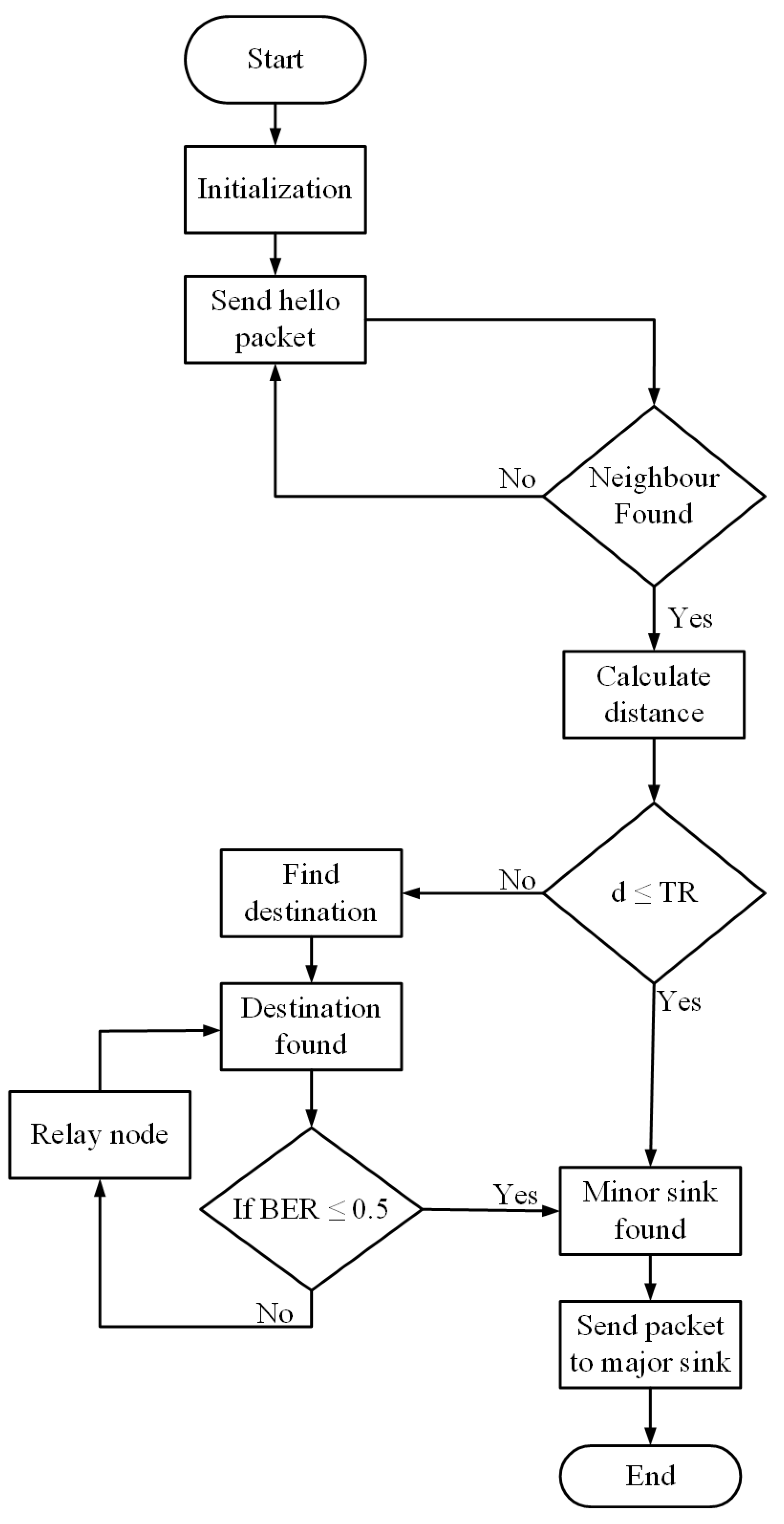
Data Forwarding and Cooperation:
| Algorithm 1: Information sharing, path set up and data forwarding |
| 1:Relay node 2 :Bit Error Rate 3 :Source node 4 :Transmission range 5 :Destination node 6 N:Total number of rounds 7 :Major sink node 8 :Minor sink node 9 :Transmitted hello packet 10 d:distance from sensor node to minor sink nodes 11 Nodes transmits hello packet= then 12 Find neighbors 13 Neighbors found= true 14 if d < = then 15 Find 16 found 17 Send packet to = true 18 else if 19 is not exist in the = then 20 Find 21 Calculate d for selection 22 found= true 23 if BER < 0.5= then 24 Find 25 found= true 26 Packet send to 27 while 28 Checks 29 Packet reached to 30 Packet forward to = true 31 end if 32 end if 33 end while 34 break |
4. Simulation Results and Analysis
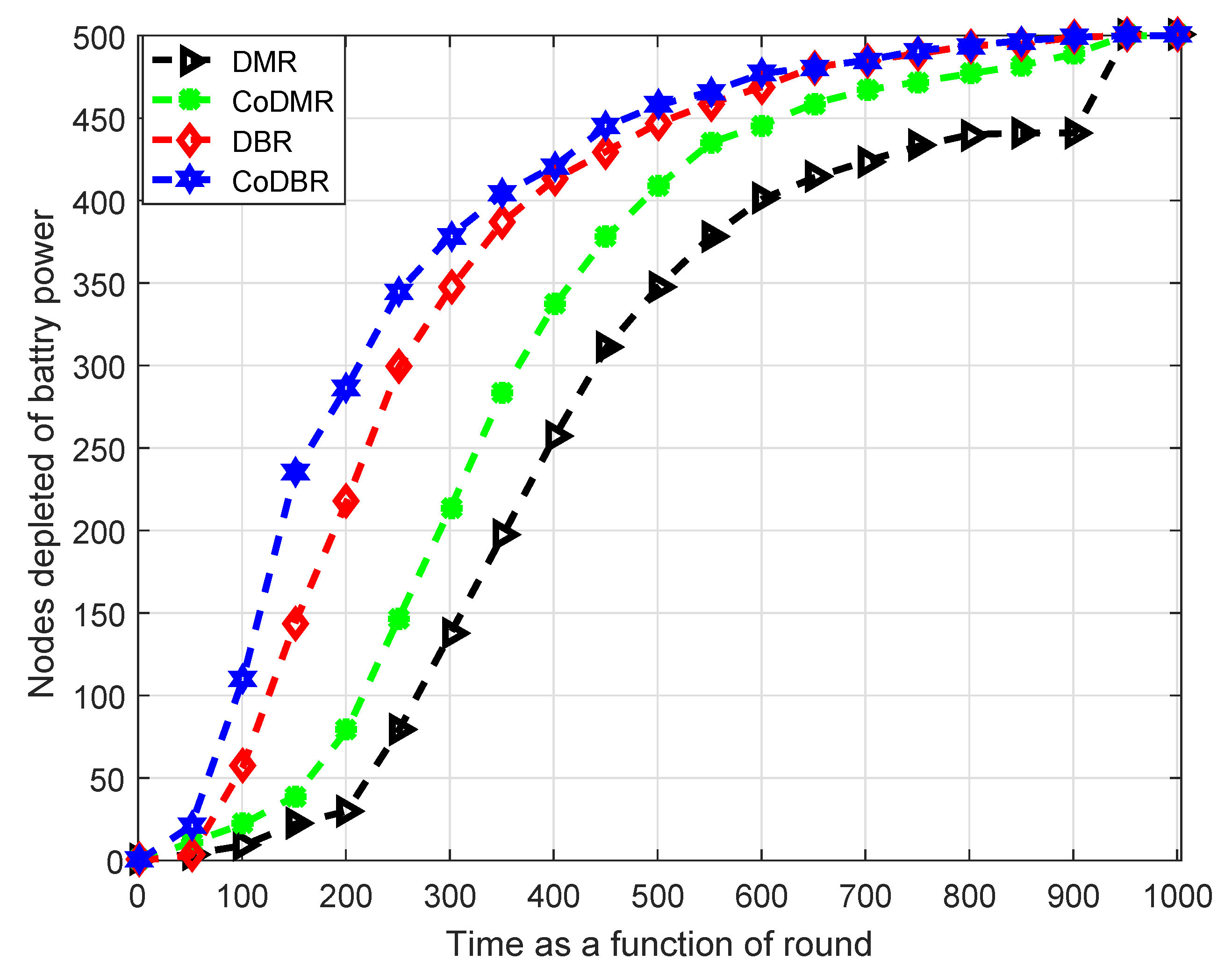
4.1. Nodes Depleted of Battery Power:
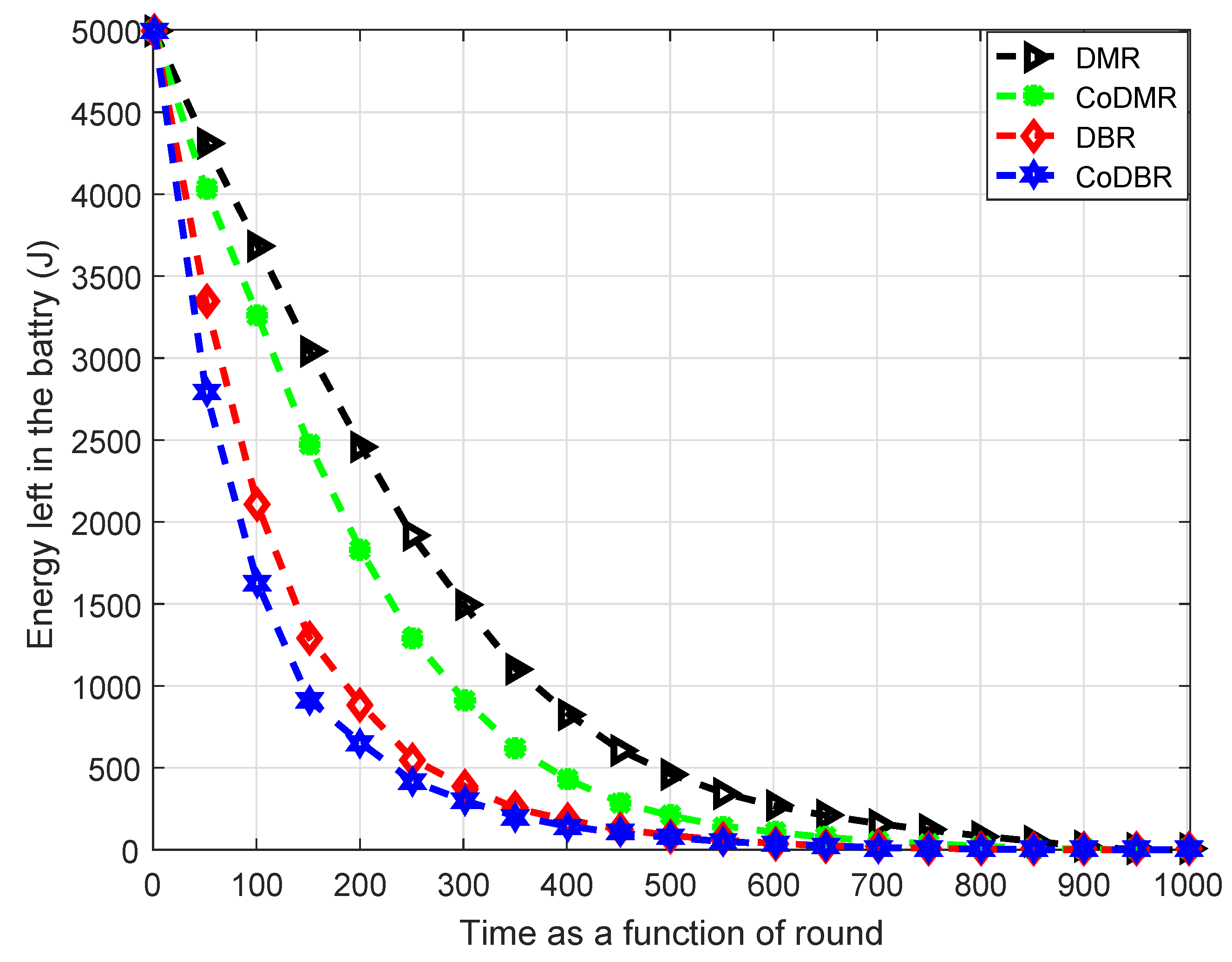
4.2. Energy Left in the Battery:
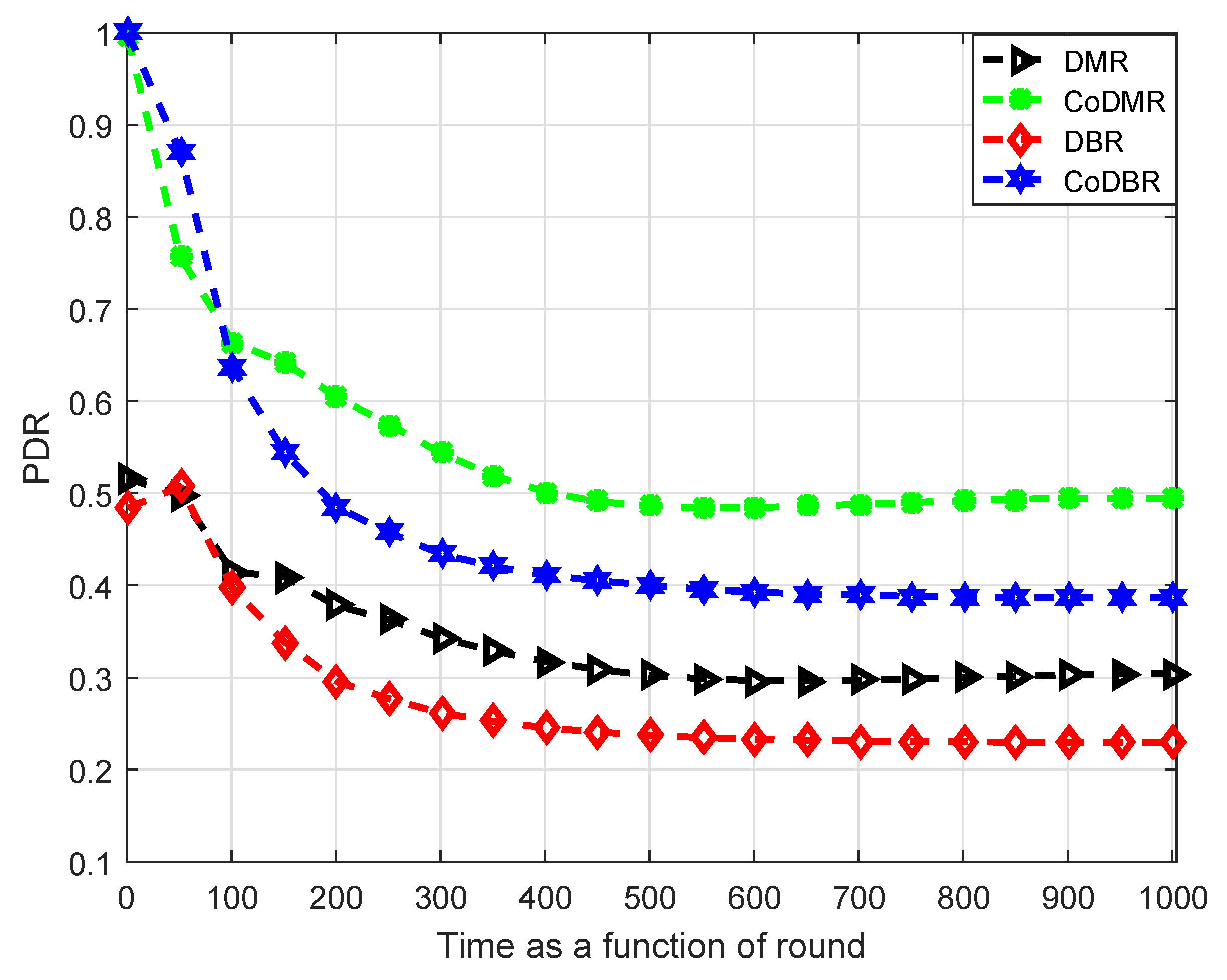
4.3. Packets Delivery Ratio
4.4. Total End-to-End Delay
4.5. Total Energy Cost
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ACK | Acknowledgement |
| BER | Bit error rate |
| CoDBR | Cooperative depth base routing |
| CoDMR | Cooperative delay minimization routing |
| CSI | Channel state information |
| DBR | Depth base routing |
| DF | Decode and forward |
| DMR | Delay minimization routing |
| Dth | Depth threshold |
| E-2-E | End- to- end |
| FRC | Fixed ratio combine |
| ID | Identification |
| MRC | Maximal ratio combine |
| PAR | Packet acceptance ratio |
| PAT | Packet arrival time |
| PDR | Packet delivery ratio |
| PSD | Power spectral density |
| REQ | Request send |
| RF | Radio frequency |
| RSSI | Received signal strength indicator |
| SNR | Signal- to- noise ratio |
| TR | Transmission range |
| TWSNs | Terrestrial wireless sensor networks |
| UWM | Underwater modem |
| UWSN | Underwater wireless sensor network |
| WSNs | Wireless sensor networks |
References
- Kuo, L.C.; Melodia, T. Cross-Layer routing on MIMO-OFDM underwater acoustic links. In Proceedings of the 9th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Seoul, Korea, 18–21 June 2012; pp. 227–235. [Google Scholar]
- Qadar, J.; Khan, A.; Mahmood, H. DNAR: Depth and Noise Aware Routing for Underwater Wireless Sensor Networks. In Proceedings of the Conference on Complex, Intelligent, and Software Intensive Systems, Matsue, Japan, 4–6 July 2018; pp. 240–251. [Google Scholar]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Challenges for efficient communication in underwater acoustic sensor networks. SIGBED Rev. 2004, 1, 3–8. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Noh, Y.; Wang, P.; Lee, U.; Torres, D.; Gerla, M. DOTS: A propagation delay-aware opportunistic MAC protocol for underwater sensor networks. In Proceedings of the 18th IEEE International Conference on Network Protocols, Kyoto, Japan, 5–8 October 2010; pp. 183–192. [Google Scholar]
- Pompili, D.; Melodia, T.; Akyildiz, I.F. Routing algorithms for delay-insensitive and delay-sensitive applications in underwater sensor networks. In Proceedings of the 12th Annual International Conference on Mobile Computing and Networking, Los Angeles, CA, USA, 23–29 September 2006; pp. 298–309. [Google Scholar]
- Hsu, C.-C.; Liu, H.-H.; Gomez, J.L.G.; Chou, C.-F. Delay-Sensitive Opportunistic Routing for Underwater Sensor Networks. IEEE Sens. J. 2015, 15, 6584–6591. [Google Scholar] [CrossRef]
- Javaid, N.; Jafri, M.; Ahmed, S.; Jamil, M.; Khan, Z.A.; Qasim, U.; Al-Saleh, S.S. Delay-Sensitive Routing Schemes for Underwater Acoustic Sensor Networks. Int. J. Distrib. Sens. Netw. 2015, 11, 532676. [Google Scholar] [CrossRef]
- Partan, J.; Kurose, J.; Levine, B.N. A survey of practical issues in underwater networks. SIGMOBILE Mob. Comput. Commun. Rev. 2007, 11, 23–33. [Google Scholar] [CrossRef]
- Basagni, S.; Petrioli, C.; Petroccia, R.; Spaccini, D. CARP: A Channel-aware routing protocol for underwater acoustic wireless networks. Ad Hoc Netw. 2015, 34, 92–104. [Google Scholar]
- Fadoul, M.; Morsin, M.B.; Leow, C.Y.; Eteng, A.A. Using amplify-and-forward relay for coverage extension in indoor environments. J. Theor. Appl. Inf. Technol. 2016, 91, 304–312. [Google Scholar]
- Khan, A.; Ali, I.; Rahman, A.U.; Imran, M.; Mahmood, H.; E-Amin, F. Co-EEORS: Cooperative Energy Efficient Optimal Relay Selection Protocol for Underwater Wireless Sensor Networks. IEEE Access 2018, 6, 28777–28789. [Google Scholar] [CrossRef]
- Nasir, H.; Javaid, N.; Ashraf, H.; Manzoor, S.; Khan, Z.A.; Qasim, U.; Sher, M. CoDBR: cooperative depth based routing for underwater wireless sensor networks. In Proceedings of the 2014 Ninth International Conference on Broadband and Wireless Computing, Communication and Applications, Guangdong, China, 8–10 November 2014; pp. 52–57. [Google Scholar]
- Hafeez, T.; Javaid, N.; Shakeel, U.; Hussain, S.; Maqsood, H. An Energy Efficient Adaptive Cooperative Routing Protocol for Underwater WSNs. In Proceedings of the 2015 10th International Conference on Broadband and Wireless Computing, Communication and Applications (BWCCA), Krakow, Poland, 4–6 November 2015; pp. 304–310. [Google Scholar]
- Ahmed, S.; Javaid, N.; Khan, F.A.; Durrani, M.Y.; Ali, A.; Shaukat, A.; Sandhu, M.M.; Khan, Z.A.; Qasim, U. Co-UWSN: Cooperative Energy-Efficient Protocol for Underwater WSNs. Int. J. Distrib. Sens. Netw. 2015, 11, 891410. [Google Scholar] [CrossRef] [PubMed]
- Pervaiz, K.; Wahid, A.; Sajid, M.; Khizar, M.; Khan, Z.A.; Qasim, U.; Javaid, N. DEAC: Depth and energy aware cooperative routing protocol for underwater wireless sensor networks. In Proceedings of the 2016 10th International Conference on Complex, Intelligent, and Software Intensive Systems (CISIS), Fukuoka, Japan, 6–8 July 2016; pp. 150–158. [Google Scholar]
- Dubey, A.; Rajawat, A. Impulse effect of node mobility on delay sensitive routing algorithm in underwater sensor network. In Proceedings of the 2016 International Conference on Internet of Things and Applications (IOTA), Pune, India, 22–24 January 2016; pp. 437–442. [Google Scholar]
- Li, C.; Xu, Y.; Xu, C.; An, Z.; Diao, B.; Li, X. DTMAC: A Delay Tolerant MAC Protocol for Underwater Wireless Sensor Networks. IEEE Sensors J. 2016, 16, 4137–4146. [Google Scholar] [CrossRef]
- Shakeel, U.; Jan, N.; Qasim, U.; Khan, Z.A.; Javaid, N. DRADS: Depth and reliability aware delay sensitive routing protocol for underwater WSNs. In Proceedings of the 2016 10th International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing (IMIS), Fukuoka, Japan, 6–8 July 2016; pp. 78–83. [Google Scholar]
- Shah, P.M.; Ullah, I.; Khan, T.; Hussain, M.S.; Khan, Z.A.; Qasim, U.; Javaid, N. MobiSink: Cooperative routing protocol for underwater sensor networks with sink mobility. In Proceedings of the 2016 IEEE 30th International Conference on Advanced Information Networking and Applications (AINA), Crans-Montana, Switzerland, 23–25 March 2016; pp. 189–197. [Google Scholar]
- Javaid, N.; Hussain, S.; Ahmad, A.; Imran, M.; Khan, A.; Guizani, M. Region based cooperative routing in underwater wireless sensor networks. J. Netw. Comput. Appl. 2017, 92, 31–41. [Google Scholar] [CrossRef]
- Abbasi, J.S.; Javaid, N.; Gull, S.; Islam, S.; Imran, M.; Hassan, N.; Nasr, K. Balanced Energy Efficient Rectangular routing protocol for Underwater Wireless Sensor Networks. In Proceedings of the 2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, Spain, 26–30 June 2017; pp. 1634–1640. [Google Scholar]
- Rahman, M.A.; Lee, Y.; Koo, I. EECOR: An Energy-Efficient Cooperative Opportunistic Routing Protocol for Underwater Acoustic Sensor Networks. IEEE Access 2017, 5, 14119–14132. [Google Scholar] [CrossRef]
- Shah, S.; Khan, A.; Ali, I.; Ko, K.-M.; Mahmood, H. Localization Free Energy Efficient and Cooperative Routing Protocols for Underwater Wireless Sensor Networks. Symmetry 2018, 10, 498. [Google Scholar] [CrossRef]
- Majid, A.; Azam, I.; Waheed, A.; Zain-ul-Abidin, M.; Hafeez, T.; Khan, Z.A.; Qasim, U.; Javaid, N. An energy efficient and balanced energy consumption cluster based routing protocol for underwater wireless sensor networks. In Proceedings of the 2016 IEEE 30th International Conference on Advanced Information Networking and Applications (AINA), Crans-Montana, Switzerland, 23–25 March 2016; pp. 324–333. [Google Scholar]
- Chong, P.K.; Kim, D. Surface-level path loss modeling for sensor networks in flat and irregular terrain. ACM Trans. Sen. Netw. 2013, 9, 15. [Google Scholar] [CrossRef]
- Vakily, V.T.; Jannati, M. A new method to improve performance of cooperative underwater acoustic wireless sensor networks via frequency controlled transmission based on length of data links. Wirel. Sens. Netw. 2010, 2, 381. [Google Scholar] [CrossRef]
- Yan, H.; Shi, Z.J.; Cui, J.H. DBR: Depth-based routing for underwater sensor networks. In Proceedings of the International conference on research in networking, New Delhi, India, 2–14 December 2008; pp. 72–86. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Technique Used | Accomplishment | Deficiency | Year |
|---|---|---|---|---|
| [14] | Cooperative region region-based routing algorithm, destination, and and relay node are selected by taking the lowest depth and maximum residual energy information, use maximal ratio combination (MRC) technique for diversity. | Balance energy consumption, consume minimum energy, ensure maximum information at the sink node. | Provide high latency during packet forwarding, nodes died quickly. | 2015 |
| [15] | Cooperative Cooperative-based routing protocol, destination, and relay node are chosen by considering the value of SNR and physical distance from the sink node. | Cope the contrary channel effects, reduce energy consumption, increase the throughput. | Reduce the network reliability, and dropped maximum information packets. | 2015 |
| [16] | Cooperative Cooperative-based protocol used Dth for reliability, the selection of best forwarder nodes is base over the lowest depth and highest remaining energy information, a diversity technique is used for packet combining. | Improve the network reliability by providing good PDR, ensure maximum information at the sink node. | Unbalance energy consumption, nodes died quickly, render high latency. | 2016 |
| [17] | Non-cooperative distributed delay sensitivity routing algorithm, best forwarder node is selected in the distributed manner, used train transmitted method to enhance channel efficiency. | Reduce the latency during packet transmitting, improve the PDR. | Unbalanced energy consumption, exhaust maximum energy. | 2016 |
| [18] | Non-cooperative protocol scheme used two different states the network is divided into m slots, propagation delay is influenced by the transmission rate, used different probability for transmission and receiving. | Overcome the void space problem in the network, decrease latency, and and increase the throughput. | Consume maximum energy due to the deficiency of the balance energy technique. | 2016 |
| Reference | Technique Used | Accomplishment | Deficiency | Year |
|---|---|---|---|---|
| [19] | Cooperative Cooperative-fashion algorithm, the best forwarder node is select by considering the lowest distance form the desired movable sink node, used sink mobility to reduce the latency and maintain a balance network. | Balance energy consumption, enhance the network throughput, decrease latency. | Select the channel link blindly which reduce the PDR. | 2016 |
| [20] | Non-cooperative algorithm, the best forwarder node selects by considering the node ID, depth information, and and the number of neighbors, used metric function for delay minimization. | Balance energy consumption engross minimum energy, decrease latency. | Decrease the network reliability and maximum information lost due to packet loss. | 2016 |
| [21] | Non-cooperative region region-based protocol, best forwarder node is selected through nodes ID, residual energy and SNR value, used RSSI for localization mote track technique is utilized for path establishment. | Ensure maximum packet reached to the sink node, improve the PDR, and and hold a reliable network. | Exhaust maximum energy in the network, nodes died quickly. | 2017 |
| [22] | Non-cooperative rectangular region region-based scheme, used two mobile sinks, best forwarder node is chosen by considering the nodes ID and nodes coordinates. | Ensure maximum packet received at the sink node, improve the network PDR, and and balance energy consumption. | The scheme has no mechanism to check the accuracy of the received information. | 2017 |
| [23] | Cooperative Cooperative-based routing algorithm, relay and destination nodes are chosen by considers the values minimum depth information and residual energy, the fuzzy logic technique is applied to balance energy. | The energy cost is minimum, increase the network lifespan, improve the link quality. | Absence of packet analyzing appliance, decrease network accuracy. | 2017 |
| [24] | Present two schemes non-cooperative and non-cooperative protocols, the best forwarder nodes are selected through a function of maximum remaining energy, less number of fewer hops, and and lowest BER. | Reduce the exhaust energy, balance energy consumption, improve the reliability. | Provide high latency during packets transmission. | 2018 |
| Parameters | Calculated Values |
|---|---|
| Bandwidth | 30,000 Hz |
| Data packet size | 1600 bits |
| Depth | 500 m |
| Hello packet size | 48 bits |
| Idle mode exhaust power | 10 mW |
| Receiving power | 0.1 W |
| Total initial energy | 10 Joules |
| Total sensors nodes | 500 |
| Transmission power | 2 W |
| Transmission range | 100 m |
| Major sink nodes | 1 |
| Minor sink nodes | 4 |
| Width | 500 m |
| Wind speed | 10 m/s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ullah, U.; Khan, A.; Altowaijri, S.M.; Ali, I.; Rahman, A.U.; Kumar V., V.; Ali, M.; Mahmood, H. Cooperative and Delay Minimization Routing Schemes for Dense Underwater Wireless Sensor Networks. Symmetry 2019, 11, 195. https://doi.org/10.3390/sym11020195
Ullah U, Khan A, Altowaijri SM, Ali I, Rahman AU, Kumar V. V, Ali M, Mahmood H. Cooperative and Delay Minimization Routing Schemes for Dense Underwater Wireless Sensor Networks. Symmetry. 2019; 11(2):195. https://doi.org/10.3390/sym11020195
Chicago/Turabian StyleUllah, Ubaid, Anwar Khan, Saleh M. Altowaijri, Ihsan Ali, Atiq Ur Rahman, Vijay Kumar V., Munsif Ali, and Hasan Mahmood. 2019. "Cooperative and Delay Minimization Routing Schemes for Dense Underwater Wireless Sensor Networks" Symmetry 11, no. 2: 195. https://doi.org/10.3390/sym11020195
APA StyleUllah, U., Khan, A., Altowaijri, S. M., Ali, I., Rahman, A. U., Kumar V., V., Ali, M., & Mahmood, H. (2019). Cooperative and Delay Minimization Routing Schemes for Dense Underwater Wireless Sensor Networks. Symmetry, 11(2), 195. https://doi.org/10.3390/sym11020195