1. Introduction
The
p-norms in
have applications in many branches of mathematics, physics and computer science. For
the
p-norm of the vector
(also called
-norm) is defined as
For
, we arrive at the Euclidean norm, and when
the norm is called the infinity norm or the maximum norm and is given by
When , Formula (1) does not define a norm, because the triangle inequality is not satisfied.
2. Preliminaries
For
, let
be the 3D
p-ball of radius
centered at the origin, defined by
For finite
p the parametric equations of
are
with
,
.
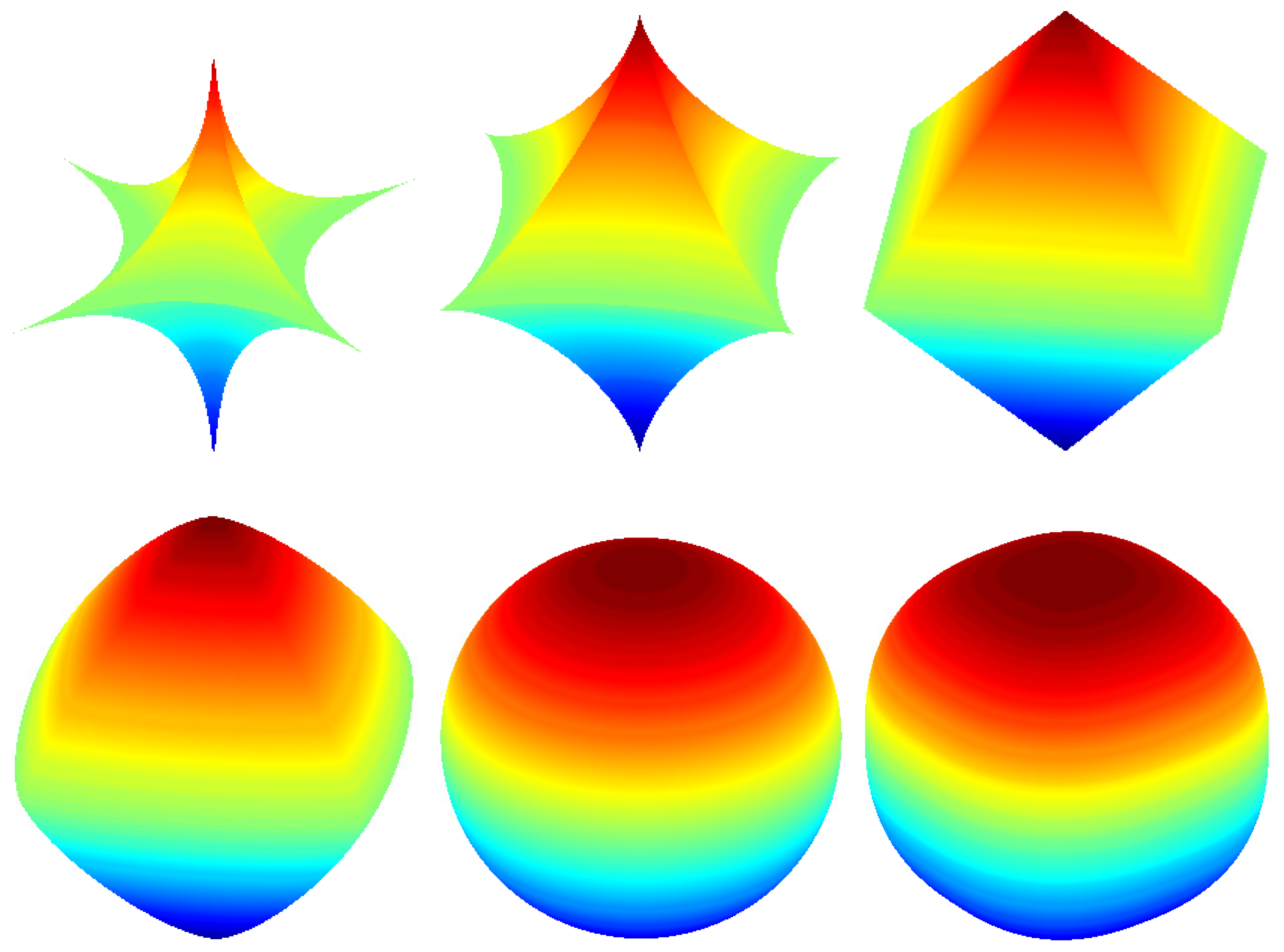
For
the ball
is the regular octahedron with the vertices on the axes, at distance
r from the origin. For
, the set
is the cube with edge of length
and for
the region
represents the Euclidean ball. For
the balls are called
superellipsoids and they are used in computer graphics (see [
1,
2], where the author uses the name
superquadrics to refer to both superellipsoids and supertoroids). Some examples of balls
, for different values of
p are given in
Figure 1.
The volume of the 3D
p-ball is
We notice that the radius
of the regular octahedron
with the same volume as the
p-ball
must be
We will construct a map
which preserves the volume, i.e.,
satisfies
Consider the bijections
, which are particular cases of the regularized incomplete Beta function (also known in statistics as cumulative beta distribution functions)
In the standard notation we have
and
, where
is the so-called regularized incomplete beta function defined as
, with
One has and , further are increasing functions. Let be the inverses (in Mathematica one can use the command InverseBetaRegularized for the inverses and ) of the functions and , respectively.
For
, let
Lemma 1. For we have Proof. The volume of
can be computed using the double integral
where
. With the change of variables
and
the Jacobian is
and the new domain of integration is
The volume of
is
With the change of variables
and
in the two independent integrals we get
□
3. Construction of the Volume Preserving Map
and Its Inverse
Of course, there is no unique map with the volume preserving property. In this section, we will construct a map satisfying the following conditions:
- (a)
has the volume preserving property (2);
- (b)
is continuous on and has continuous partial derivatives at every point of , except the points of the coordinate planes;
- (c)
has the symmetry property
- (d)
maps every onto some .
Theorem 2. The map with the properties (a)–(d) is defined bywhen, andwhen.
Proof. Let
. Then
. Consider first the case
. From condition (d) for the limit case
and using (a) and (c) we deduce that
. This relation gives us
From conditions (a) and (d) there is some
such that
Since
and
have the same volume and
we obtain
Further, since
and
, this equality can be written as
From conditions (a) and (b) the Jacobian of
must be 1, i.e.
Further, taking into account Formulas (3) and (4) we have
then we calculate the partial derivatives of
Y and
Z with respect to
and
z and introduce them in (5). After some calculations, we find that
X must be solution of the following first order partial differential equation
With
the equation is rewritten
We have to solve the symmetric system
The first equality gives us
, for some constant
. Replacing this in the equality
we get
, for some constant
. Replacing these two relations in the equality
integrating and using that the plane
is mapped onto
(this follows from the conditions (b) and (c) of the map), we obtain
which is equivalent to
In the case when and also in the case when or but we use Formulas (6)–(8) to define the map . In the case when , we define , for all , using the continuity property of the map .
Finally, for the points
in the other seven octants, the map
will be defined as
□
Remark. Not all the partial derivatives of the map which occur in Theorem 2 exist at the points of the coordinates planes. For example, does not exist at the points , because the partial derivative of with respect to x does not exist at the points .
The expression of the inverse map of is given in the next theorem.
Theorem 3. The map is defined byfor every and , , , . If , we have . In the other seven octants, we define the inverse of the map using the symmetry property (c) of .
Proof. Condition (4) is equivalent to
Replacing (3) in (7) we obtain
which is equivalent to
After some computations we can express in terms of to obtain (9)–(11). □
4. Particular Cases
4.1. The Cases and
For one has , and therefore is the identity.
For
one has
,
,
and for
, the map
is
If we use the spherical coordinates defined by
,
and
we obtain relations (9), (10), (11) from [
3], where we also gave the inverse, which has an explicit expression.
4.2. The Case
In this case we will obtain a new map, different from the one constructed in [
4].
We restrict again to the case because of the symmetry property of the map.
First, a simple calculation shows that
and
In order to calculate the limits in (6)–(8) when we use the following result.
Proof. We use the equality
, which holds for
. One has
and now it is easy to see that the limit when
is the one in (12). □
Proposition 5. For we have Proof. With the change of variable
we have
From
we further deduce that
, and therefore
After integration we obtain
and further,
After applying Lemma 4 for
and replacing the limits
□
For the case we use the formula for and Formula (13), interchanging x and y.
Proposition 6. For we have Proof. Case 1. Suppose .
With the change of variable
we obtain
Applying Lemma 4 for
,
we have
Further, from the condition that
t belongs to the interval of integration we can write
and therefore
After integration we obtain
A simple calculation shows that
which imply that
Case 2. Suppose or y.
Using the equality
we have
With the change of variable
we get
Using
the proof is complete. □
In conclusion, for
, the map
has the values
given by:
and can be reduced to
The above formulas can also be used in the case when or or , with the mention that the denominators cannot be zero, except the case when , when we take
After some calculations we get that, for
the inverse
is given by
where
are the set of points
satisfying the following conditions, respectively:
Condition
can be written as
and is equivalent to
, since
.
Finally, the expressions of
can be reduced to
These formulas can also be used in the case when and in the case when or , but . In the case when we take .
If we take arbitrary numbers
, the application
is a volume preserving map, therefore we have defined a volume preserving map between arbitrary
p-balls.
5. Possible Applications
A uniform grid of a 3D domain
D is a grid in which all the cells have the same volume. This is required in statistical applications, in computer graphics in the theory of deformable bodies (see, for example, Ref. [
6] and the references therein) and in construction of wavelet bases of the space
. A refinement process is needed for multiresolution analysis or for multigrid methods, when a grid is not fine enough to solve a problem accurately. A refinement of a 3D grid is called uniform when each cell is divided into a given number of smaller cells having the same volume. To be efficient in practice, a refinement procedure should also be a simple one. One efficient way to construct a uniform and refinable (UR) grid on a domain
D is to map on
D an existing UR grid by a volume preserving map. In our case, we can construct (UR) grids on a ball
by transporting from a ball
an already constructed (UR) grid. The simplest example of such a ball with (UR) grids is the cube
, but we have also constructed such (UR) grids on the regular octahedron
(see [
3,
4]) and on the 3D Euclidean ball
(see [
3,
7] ).
The technique used in [
3] can be easily adapted to the
p-ball
in order to construct multiresolution analysis of
and orthonormal wavelet bases on the
p-ball
.
The centers of the cells in our (UR) grids in can be taken as points in interpolation formulas, as Monte Carlo interpolation or adaptive interpolation formulas.
Another application of volume preserving maps is in the theory of partial differential equations on Lipschitz domains (see [
8]).


{kind=link}