An Adaptive Data Gathering Algorithm for Minimum Travel Route Planning in WSNs Based on Rendezvous Points


Abstract
:1. Introduction
2. Related Work
3. Preliminaries
- A total of Nsensor nodes is uniformly distributed over the specified area. Each node can be uniquely identified (i.e., it has a unique identity and location information). Furthermore, all the initial energy of sensor nodes is homogeneous. The sensor nodes are powered by a finite energy source.
- The BS is static, and it is located at the center of the deployment field.
- An ME collects data by visiting certain nodes before it eventually returns to the BS.
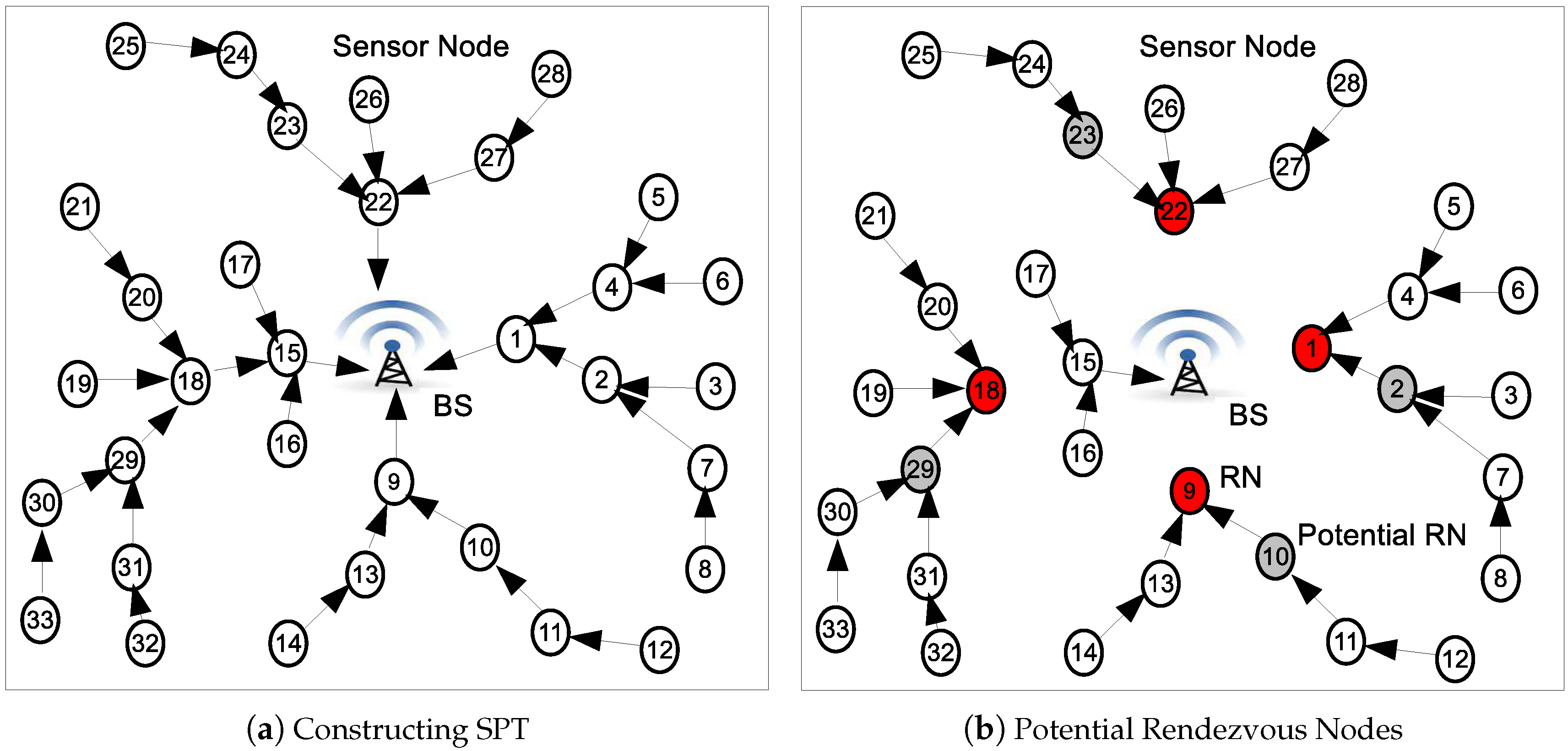
3.1. Network Model
- A subset of S, denoted by , represents the rendezvous nodes.
- A set of geometric trees is rooted in each rendezvous node . The maximum depth of each geometric tree is constrained by d and .
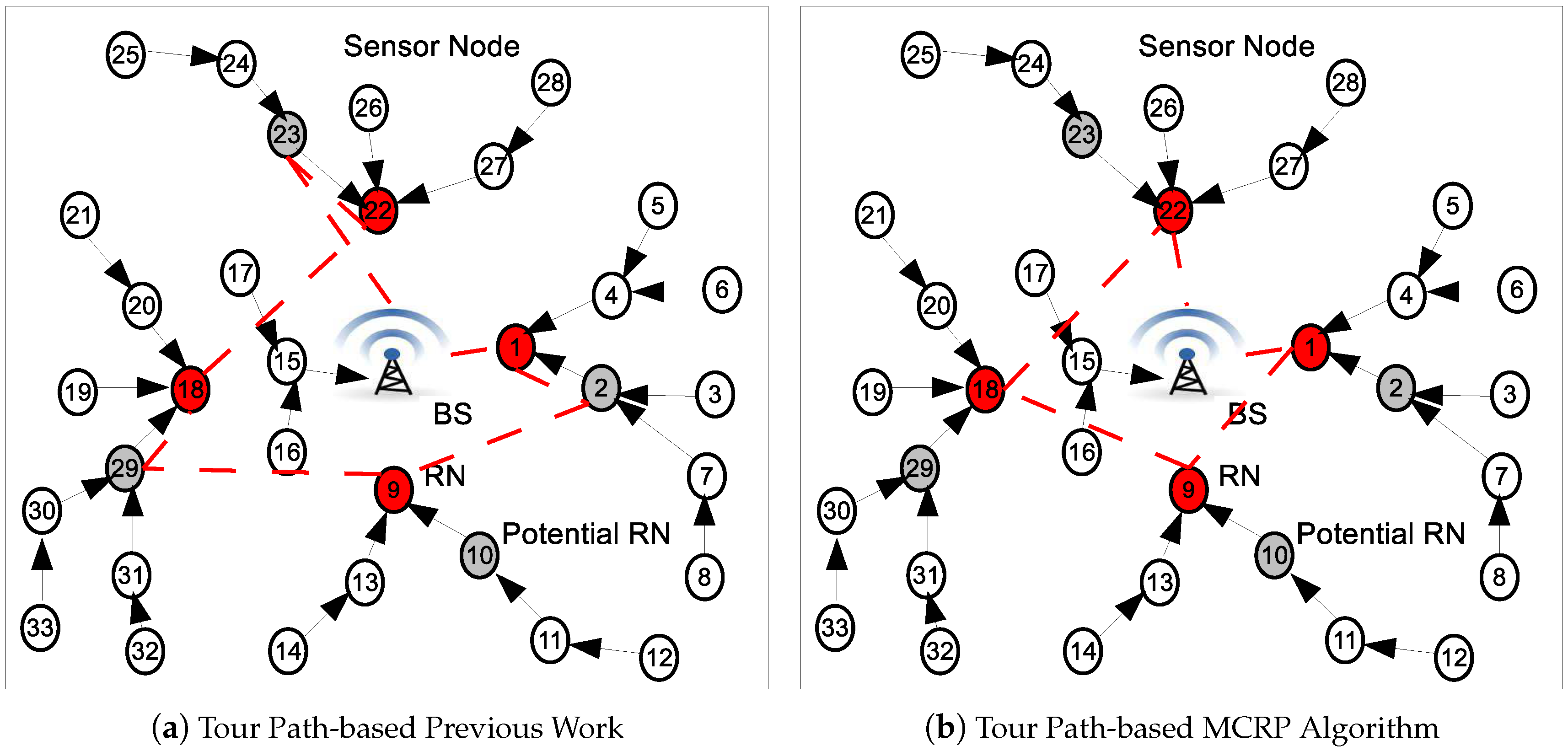
- The ME tour path U visits each rendezvous node and the BS. The tour path should be shortened to minimize the data gathering latency.
3.2. Limitations of Previous Work
- Some polling nodes may reach only a few sensors since the sensor nodes are randomly deployed.
- The affiliation nodes may be closer to the BS than the polling nodes.
4. The Proposed MCRP Algorithm
| Algorithm 1: Minimal constraint rendezvous node (MCRP) algorithm. |
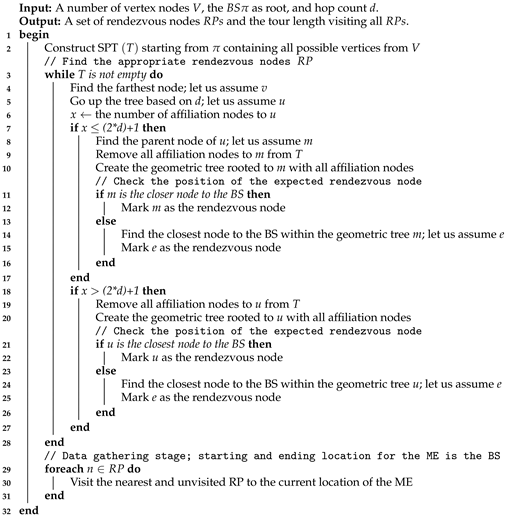 |
5. Performance Evaluation
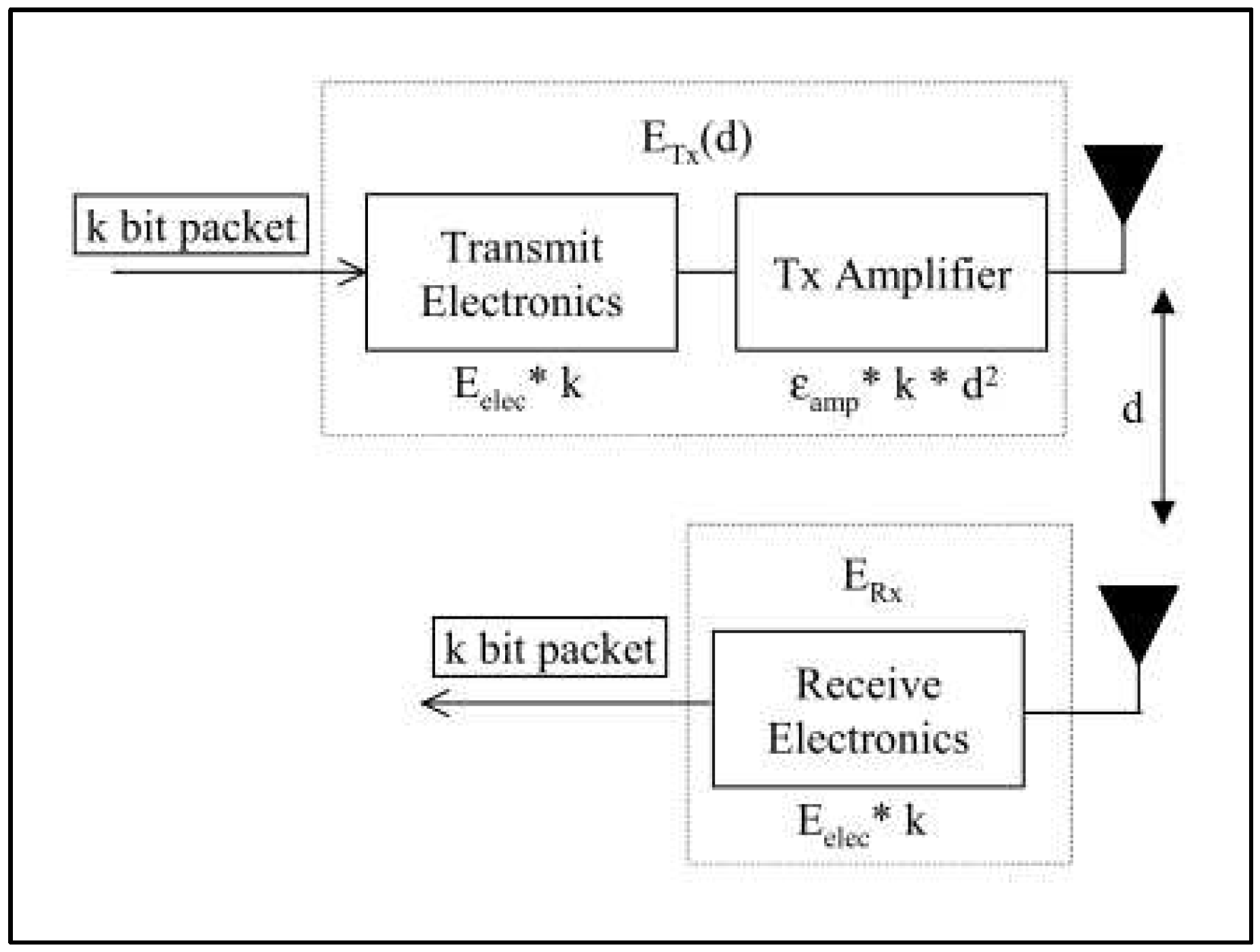
5.1. Energy Model
5.2. Simulation Architecture and Assumptions
- The transmission range, deployment field, and the number of sensor nodes are adjustable.
- Each sensor node continually generates a fixed data packet size and sends it to the parent node.
- Communication is symmetric (among nodes), and the power consumption studied is only for the packet transmission and reception. Furthermore, sensing and computation costs for data aggregation are very low, which are considered negligible.
- The ME collects data from a certain number of selected nodes. In addition, ME traverses the deployment field in a linear fashion. It is also assumes that there are no obstacles on the ME’s path. In addition, the ME (i.e., vehicle) can be recharge when it arrives back at the BS or using some sort of solar power. Thus, the power of the ME is not an issue in this paper.
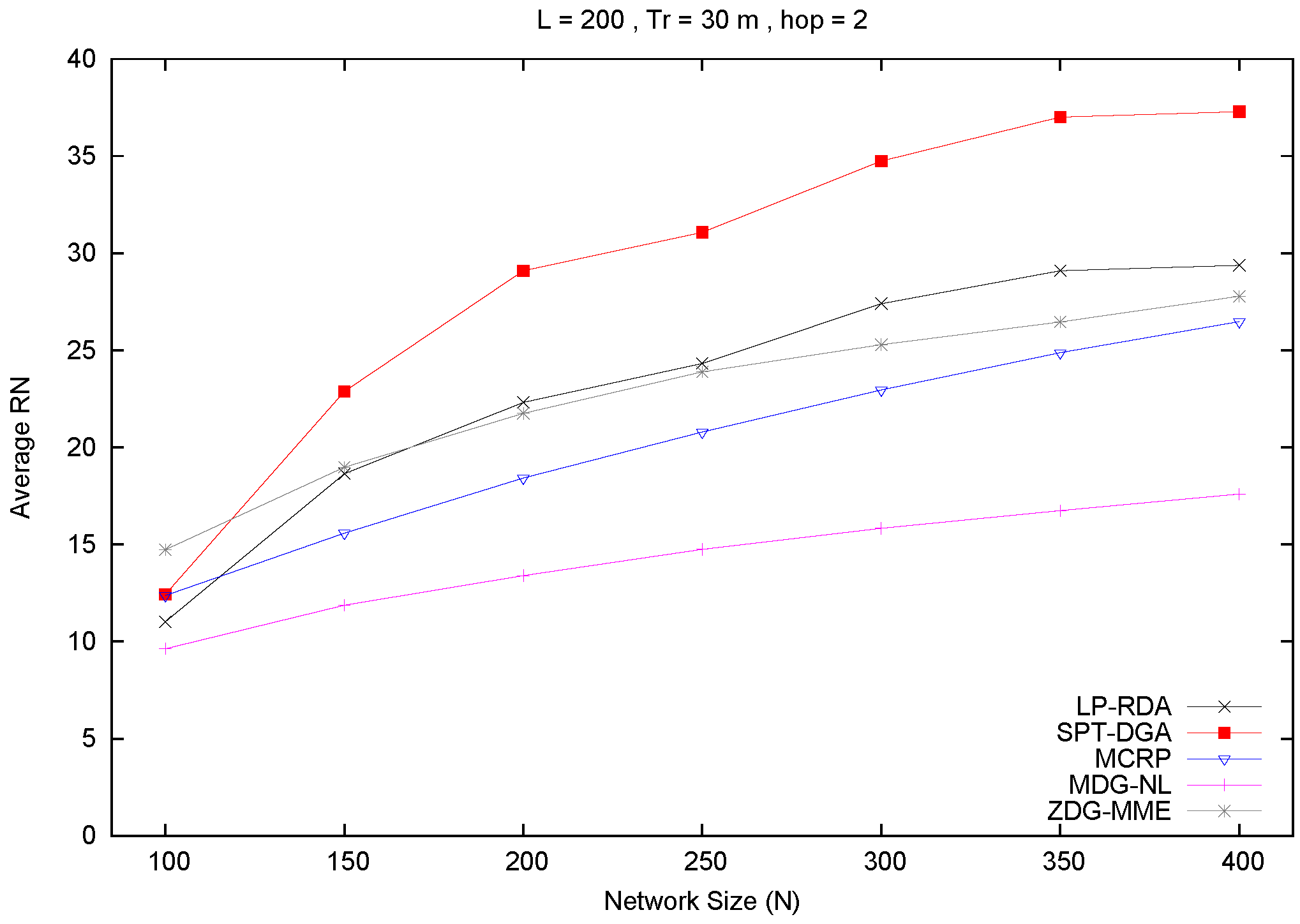
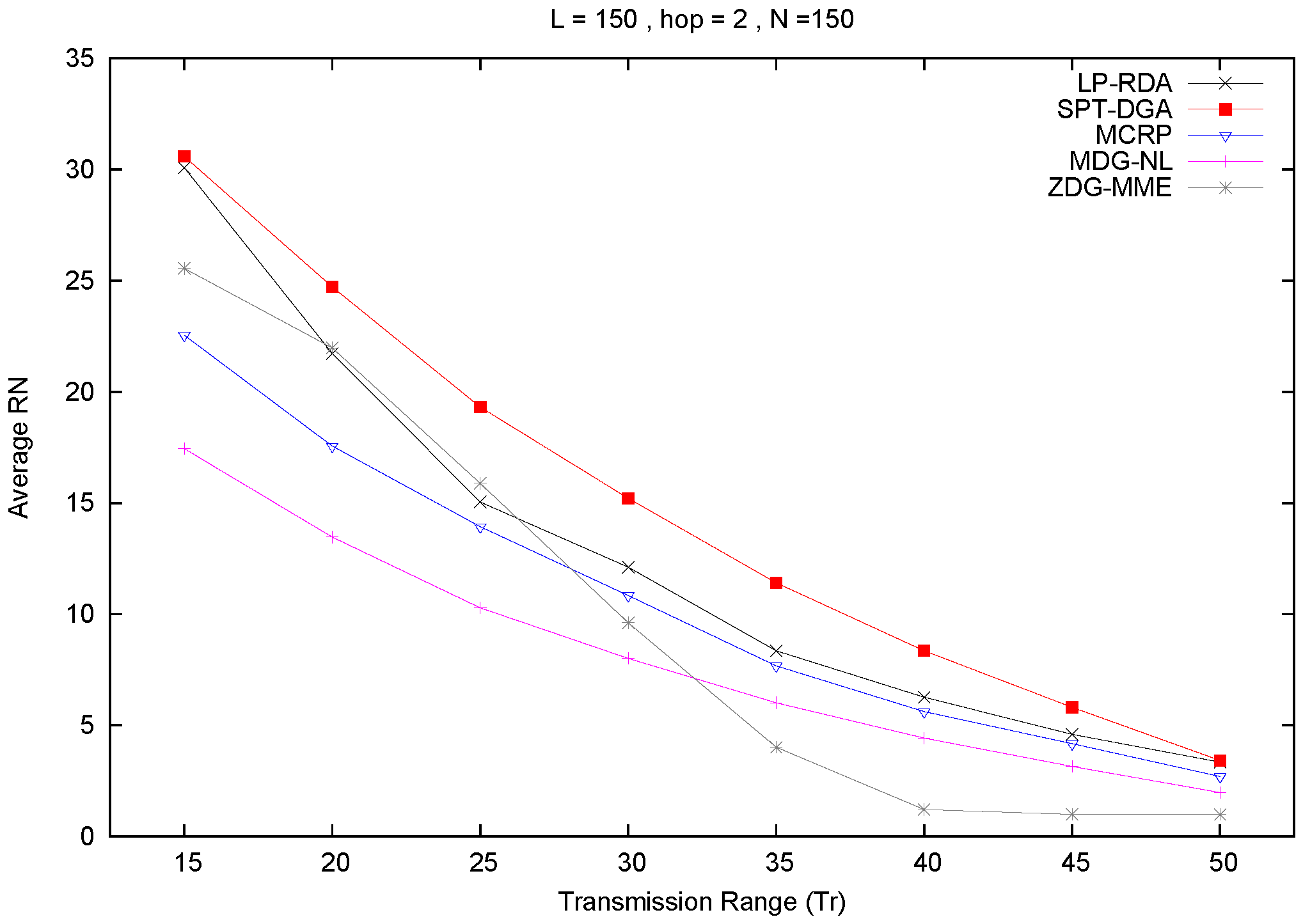
5.3. Rendezvous Node Analysis
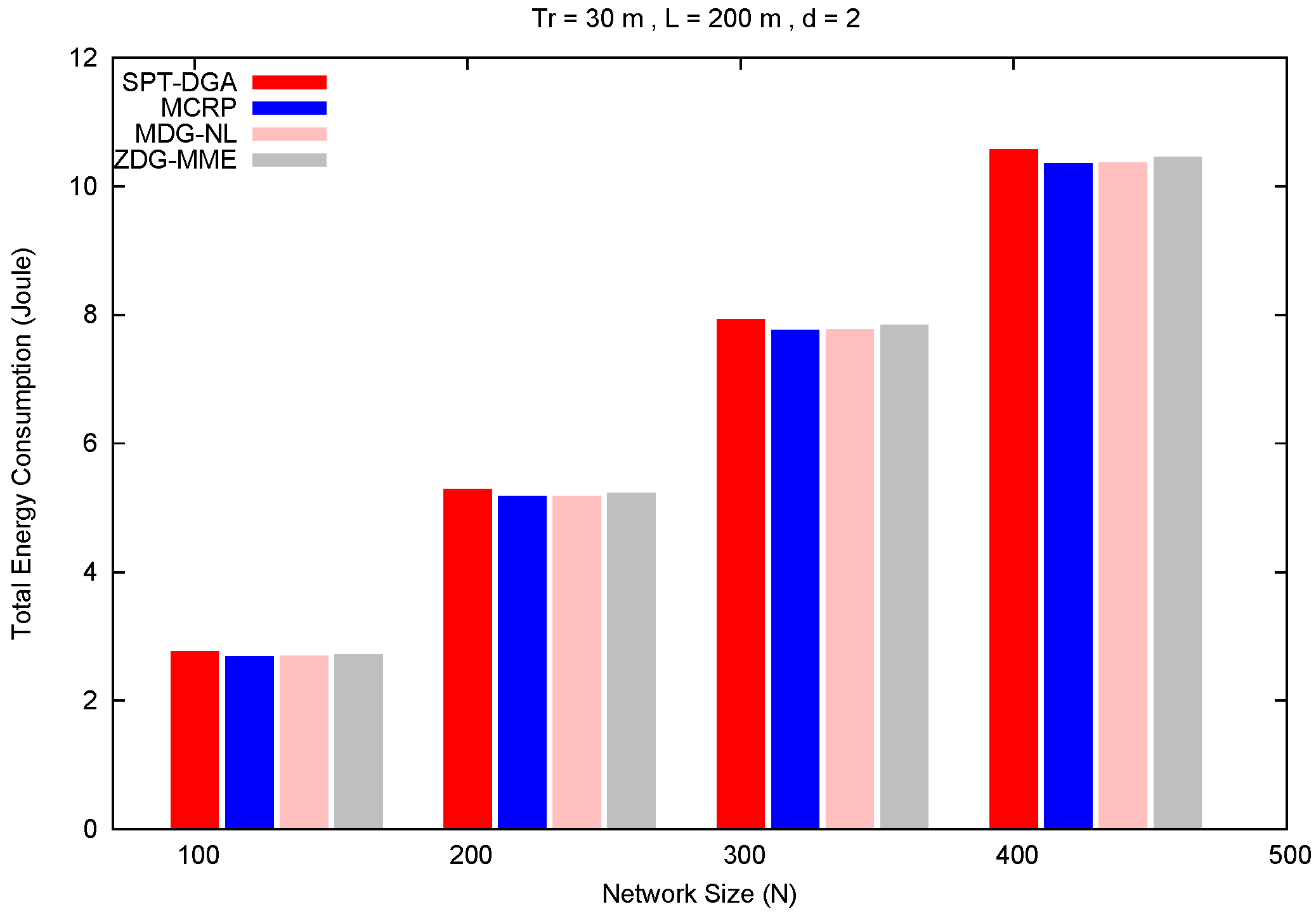
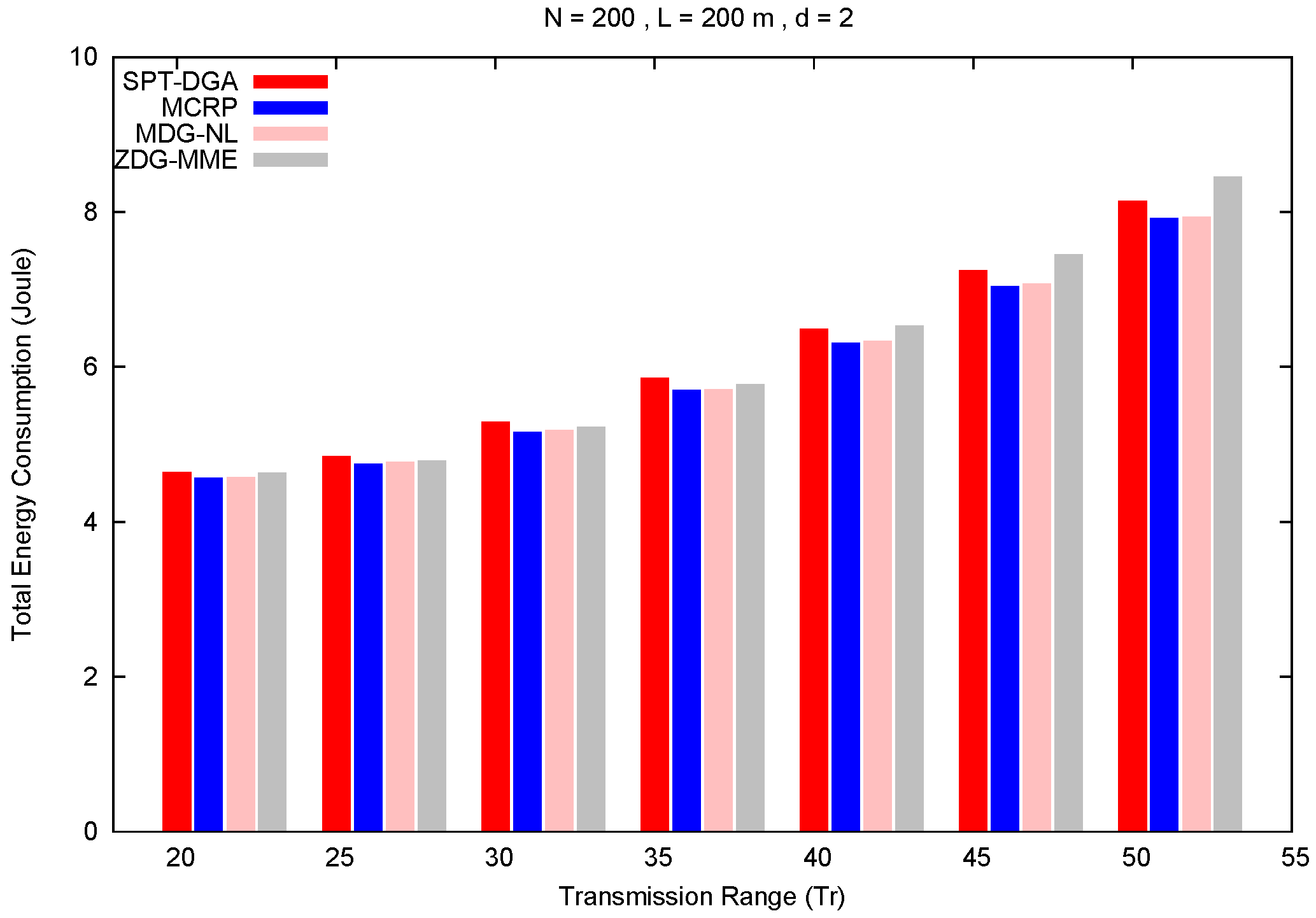
5.4. Power Consumption Analysis
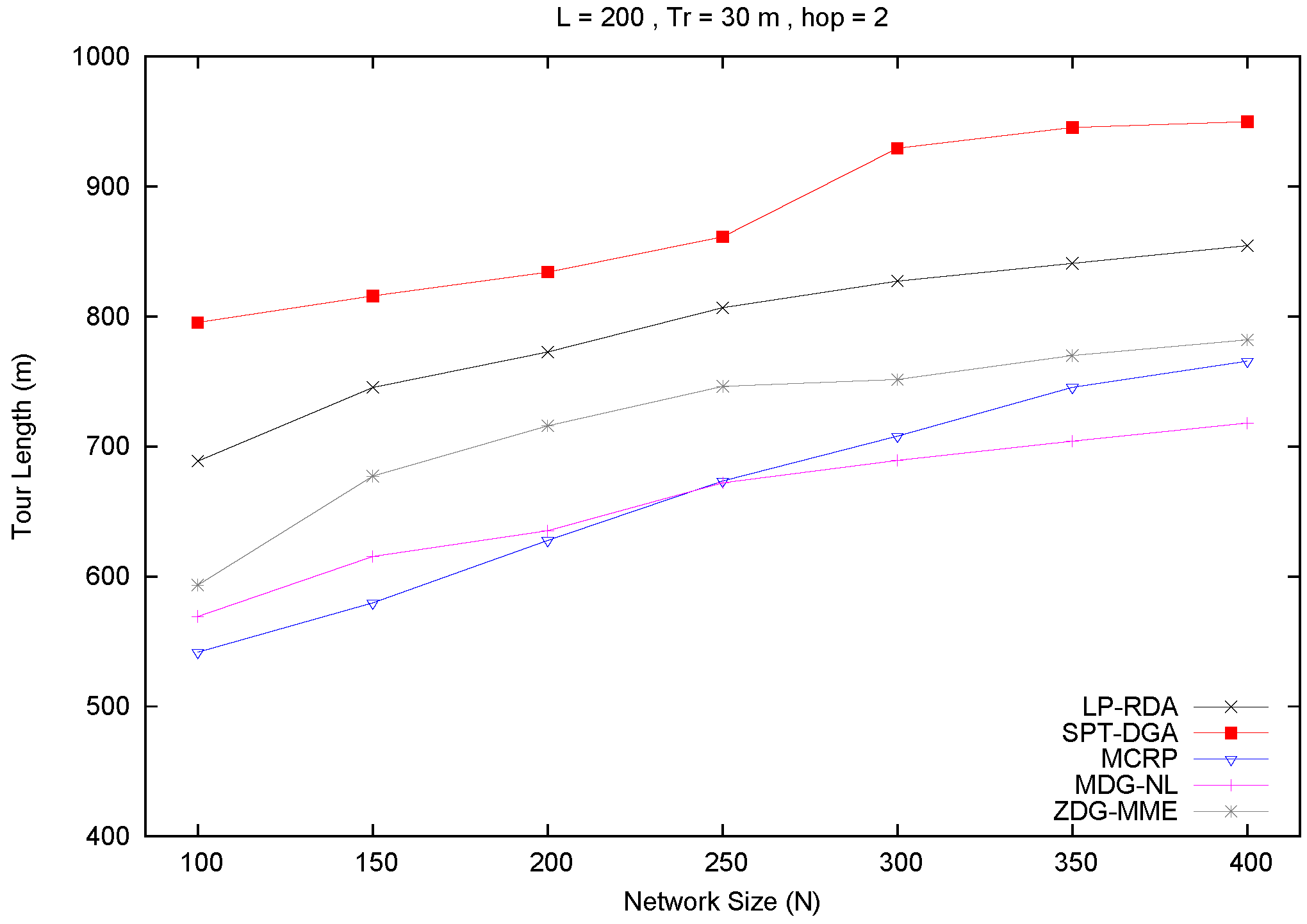
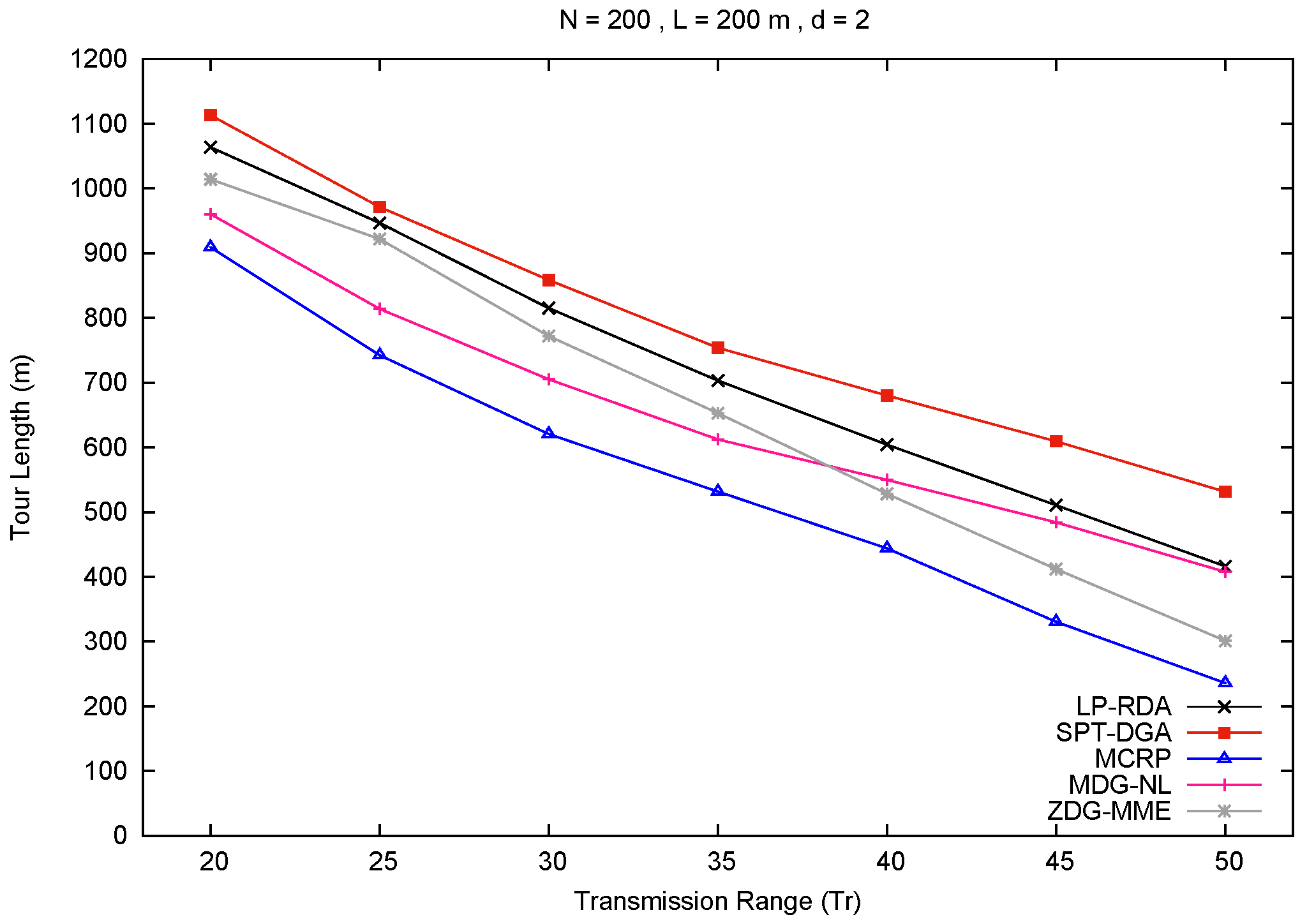
5.5. Tour Length Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, D.; Liu, Z.; Wang, L.; Dou, M.; Chen, J.; Li, H. Natural Disaster Monitoring with Wireless Sensor Networks: A Case Study of Data-intensive Applications upon Low-Cost Scalable Systems. Mob. Netw. Appl. 2013, 18, 651–663. [Google Scholar] [CrossRef]
- Garcia-Sanchez, A.-J.; Garcia-Sanchez, F.; Losilla, F.; Kulakowski, P.; Garcia-Haro, J.; Rodríguez, A.; López-Bao, J.-V.; Palomares, F. Wireless Sensor Network Deployment for Monitoring Wildlife Passages. Sensors 2010, 10, 7236–7262. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yeh, L.W.; Wang, Y.C.; Tseng, Y.C. iPower: an energy conservation system for intelligent buildings by wireless sensor networks. IJSNet 2009, 5, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Sutar, S.H. Irrigation and fertilizer control for precision agriculture using wsn: energy efficient approach. Int. J. Adv. Comput. Inf. Res. 2012, 1, 25–29. [Google Scholar]
- Zhang, H.; Wang, X.; Chen, Y.; Jiang, G.; Lin, S. Research on Vision-Based Navigation for Plant Protection UAV under the Near Color Background. Symmetry 2019, 11, 533. [Google Scholar] [CrossRef]
- Wang, D.; Ni, Y. Wireless Sensor Networks for Earthquake Early Warning Systems of Railway Lines. In Proceedings of the 1st International Workshop on High-Speed and Intercity Railways, Shenzhen and Hong Kong, China, 19–22 July 2011; Ni, Y.Q., Ye, X.W., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 417–426. [Google Scholar]
- Mwitondi, K.; Al Sadig, I.; Hassona, R.; Taylor, C.; Yousef, A. Statistical Estimate of Radon Concentration from Passive and Active Detectors in Doha. Data 2018, 3, 22. [Google Scholar] [CrossRef]
- Becker, M.; Wenning, B.L.; Görg, C.; Jedermann, R.; Timm-Giel, A. Logistic applications with wireless sensor networks. In Proceedings of the 6th Workshop on Hot Topics in Embedded Networked Sensors, Killarney, Ireland, 28–29 June 2010; p. 6. [Google Scholar]
- Mele, R.; Poli, G. The Effectiveness of Geographical Data in Multi-Criteria Evaluation of Landscape Services. Data 2017, 2, 9. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, R.; Qian, L. An Improved A* Algorithm Based on Hesitant Fuzzy Set Theory for Multi-Criteria Arctic Route Planning. Symmetry 2018, 10, 765. [Google Scholar] [CrossRef]
- Tarachand, A.; Kumar, V.; Raj, A.; Kumar, A.; Jana, P. An Energy efficient Load Balancing Algorithm for cluster-based wireless sensor networks. In Proceedings of the Annual IEEE India Conference (INDICON ’12), Kochi, India, 7–9 December 2012; pp. 1250–1254. [Google Scholar]
- Bandyopadhyay, S.; Tian, Q.; Coyle, E. Spatio-temporal sampling rates and energy efficiency in wireless sensor networks. IEEE/ACM Trans. Netw. 2005, 13, 1339–1352. [Google Scholar] [CrossRef]
- Takruri, M.; Rajasegarar, S.; Challa, S.; Leckie, C.; Palaniswami, M. Spatio-temporal modelling-based drift-aware wireless sensor networks. IET Wirel. Sens. Syst. 2011, 1, 110–122. [Google Scholar] [CrossRef]
- Jang, U.; Lee, S.; Yoo, S. Optimal wake-up scheduling of data gathering trees for wireless sensor networks. J. Parallel Distrib. Comput. 2012, 72, 536–546. [Google Scholar] [CrossRef]
- Bista, R.; Kim, Y.K.; Choi, Y.H.; Chang, J.W. A New Energy-Balanced Data Aggregation Scheme in Wireless Sensor Networks. In Proceedings of the 2009 International Conference on Computational Science and Engineering, Vancouver, BC, Canada, 29–31 August 2009; Volume 2, pp. 558–563. [Google Scholar]
- Liu, T.; Li, F. Power-Efficient Clustering Routing Protocol Based on Applications in Wireless Sensor Network. In Proceedings of the 2009 5th International Conference on Wireless Communications, Networking and Mobile Computing, Beijing, China, 24–26 September 2009; pp. 1–6. [Google Scholar]
- Ren, F.; Zhang, J.; He, T.; Lin, C.; Ren, S. EBRP: Energy-Balanced Routing Protocol for Data Gathering in Wireless Sensor Networks. IEEE Trans. Parallel Distrib. Syst. 2011, 22, 2108–2125. [Google Scholar] [CrossRef]
- Ding, Z.; Yamauchi, N. An improvement of energy efficient multi-hop time synchronization algorithm in wireless sensor network. In Proceedings of the 2010 IEEE International Conference on Wireless Communications, Networking and Information Security, Beijing, China, 25–27 June 2010; pp. 116–120. [Google Scholar]
- Tang, J.; Yang, W.; Zhu, L.; Wang, D.; Feng, X. An Adaptive Clustering Approach Based on Minimum Travel Route Planning for Wireless Sensor Networks with a Mobile Sink. Sensors 2017, 17, 964. [Google Scholar] [CrossRef] [PubMed]
- Sha, C.; Qiu, J.M.; Li, S.Y.; Qiang, M.Y.; Wang, R.C. A Type of Low-Latency Data Gathering Method with Multi-Sink for Sensor Networks. Sensors 2016, 16, 923. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Yang, H.; Liu, G.; Peng, X. An Energy-Efficient Routing Algorithm in Three-Dimensional Underwater Sensor Networks Based on Compressed Sensing. Information 2017, 8, 66. [Google Scholar] [CrossRef]
- Shah, R.; Roy, S.; Jain, S.; Brunette, W. Data mules: Modeling and analysis of a three-tier architecture for sparse sensor networks. Ad Hoc Netw. 2003, 1, 215–233. [Google Scholar] [CrossRef]
- Zhao, M.; Ma, M.; Yang, Y. Efficient Data Gathering with Mobile Collectors and Space-Division Multiple Access Technique in Wireless Sensor Networks. IEEE Trans. Comput. 2011, 60, 400–417. [Google Scholar] [CrossRef]
- Wang, C.; Ma, H. Data Collection in Wireless Sensor Networks by Utilizing Multiple Mobile Nodes. In Proceedings of the 2011 Seventh International Conference on Mobile Ad-hoc and Sensor Networks, Beijing, China, 16–18 December 2011; pp. 83–90. [Google Scholar]
- Ma, M.; Yang, Y.; Zhao, M. Tour Planning for Mobile Data-Gathering Mechanisms in Wireless Sensor Networks. IEEE Trans. Veh. Technol. 2013, 62, 1472–1483. [Google Scholar] [CrossRef]
- Zhao, M.; Yang, Y. Bounded Relay Hop Mobile Data Gathering in Wireless Sensor Networks. IEEE Trans. Comput. 2012, 61, 265–277. [Google Scholar] [CrossRef]
- Liu, W.; Fan, J.; Zhang, S.; Wang, X. Relay Hop Constrained Rendezvous Algorithm for Mobile Data Gathering in Wireless Sensor Networks. In Network and Parallel Computing; Springer: Berlin/Heidelberg, Germany, 2013; pp. 332–343. [Google Scholar]
- Ma, M.; Yang, Y. SenCar: An energy-efficient data gathering mechanism for large-scale multihop sensor networks. IEEE Trans. Parallel Distrib. Syst. 2007, 18, 1476–1488. [Google Scholar] [CrossRef]
- Jea, D.; Somasundara, A.; Srivastava, M. Multiple controlled mobile elements (data mules) for data collection in sensor networks. In Proceedings of the First IEEE International Conference on Distributed Computing in Sensor Systems (DCOSS’05), Marina del Rey, CA, USA, 30 June–1 July 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 244–257. [Google Scholar]
- Xing, G.; Li, M.; Wang, T.; Jia, W.; Huang, J. Efficient Rendezvous Algorithms for Mobility-Enabled Wireless Sensor Networks. IEEE Trans. Mob. Comput. 2012, 11, 47–60. [Google Scholar] [CrossRef]
- Kumar, A.; Sivalingam, K. Energy-efficient mobile data collection in Wireless Sensor Networks with delay reduction using wireless communication. In Proceedings of the 2010 Second International Conference on COMmunication Systems and NETworks (COMSNETS 2010), Bangalore, India, 5–9 January 2010; pp. 1–10. [Google Scholar]
- Wu, F.J.; Huang, C.F.; Tseng, Y.C. Data Gathering by Mobile Mules in a Spatially Separated Wireless Sensor Network. In Proceedings of the 2009 Tenth International Conference on Mobile Data Management: Systems, Services and Middleware, Taipei, Taiwan, 18–20 May 2009; IEEE Computer Society: Washington, DC, USA, 2009; pp. 293–298. [Google Scholar]
- Vupputuri, S.; Rachuri, K.K.; Murthy, C.S.R. Using mobile data collectors to improve network lifetime of wireless sensor networks with reliability constraints. J. Parallel Distrib. Comput. 2010, 70, 767–778. [Google Scholar] [CrossRef]
- Sheu, J.P.; Sahoo, P.K.; Su, C.H.; Hu, W.K. Efficient path planning and data gathering protocols for the wireless sensor network. Comput. Commun. 2010, 33, 398–408. [Google Scholar] [CrossRef]
- Qadori, H.Q.; Zulkarnain, Z.A.; Hanapi, Z.M.; Subramaniam, S. A Spawn Mobile Agent Itinerary Planning Approach for Energy-Efficient Data Gathering in Wireless Sensor Networks. Sensors 2017, 17, 1280. [Google Scholar] [CrossRef] [PubMed]
- Lai, Y.; Xie, J.; Lin, Z.; Wang, T.; Liao, M. Adaptive Data Gathering in Mobile Sensor Networks Using Speedy Mobile Elements. Sensors 2015, 15, 23218–23248. [Google Scholar] [CrossRef]
- Wu, C.; Wu, W.; Wan, C.; Bekkering, E.; Xiong, N. Design and Analysis of a Data Fusion Scheme in Mobile Wireless Sensor Networks Based on Multi-Protocol Mobile Agents. Sensors 2017, 17, 2523. [Google Scholar] [CrossRef]
- Deb Barma, M.K.; Das, S. Data gathering mechanism of mobile data collector in wireless sensor network. In Proceedings of the 2016 International Conference on Internet of Things and Applications (IOTA), Pune, India, 22–24 January 2016; pp. 401–405. [Google Scholar] [CrossRef]
- Amitu, D.M. Maximizing data gathering in mobile wireless sensor networks. In Proceedings of the 2016 IEEE Conference on Wireless Sensors (ICWiSE), Langkawi, Malaysia, 10–12 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Bassam, N.A.; Jerew, O.D. Energy aware and delay-tolerant data gathering in sensor networks with a mobile sink. In Proceedings of the 2016 3rd MEC International Conference on Big Data and Smart City (ICBDSC), Muscat, Oman, 15–16 March 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Dasgupta, R.; Dasgupta, A. A multi-level method for minimizing data gathering latency in wireless sensor networks using mobile elements. In Proceedings of the 2017 International Conference on Electrical, Computer and Communication Engineering (ECCE), Cox’s Bazar, Bangladesh, 16–18 February 2017; pp. 123–127. [Google Scholar] [CrossRef]
- Zhu, C.; Wu, S.; Han, G.; Shu, L.; Wu, H. A Tree-Cluster-Based Data-Gathering Algorithm for Industrial WSNs With a Mobile Sink. IEEE Access 2015, 3, 381–396. [Google Scholar] [CrossRef]
- Marta, M.; Cardei, M. Improved sensor network lifetime with multiple mobile sinks. Pervasive Mob. Comput. 2009, 5, 542–555. [Google Scholar] [CrossRef]
- Ghaleb, M.; Subramaniam, S.; Othman, M.; Zukarnain, Z. Predetermined path of mobile data gathering in wireless sensor networks based on network layout. EURASIP J. Wirel. Commun. Netw. 2014, 2014, 51. [Google Scholar] [CrossRef] [Green Version]
- Dantu, K.; Rahimi, M.; Shah, H.; Babel, S.; Dhariwal, A.; Sukhatme, G. Robomote: enabling mobility in sensor networks. In Proceedings of the Fourth International Symposium on Information Processing in Sensor Networks, IPSN ’05, Los Angeles, CA, USA, 24–27 April 2005; pp. 404–409. [Google Scholar]
- Di Francesco, M.; Das, S.K.; Anastasi, G. Data collection in wireless sensor networks with mobile elements: A survey. ACM Trans. Sens. Netw. (Tosn) 2011, 8, 7. [Google Scholar] [CrossRef]
- Ghaleb, M.; Felemban, E.; Subramaniam, S.; Sheikh, A.A.; Qaisar, S.B. A Performance Simulation Tool for the Analysis of Data Gathering in Both Terrestrial and Underwater Sensor Networks. IEEE Access 2017, 5, 4190–4208. [Google Scholar] [CrossRef]
- Ghaleb, M.; Subramaniam, S.; Othman, M.; Zukarnain, Z. An efficient hybrid data gathering algorithm based on multihop and mobile elements in WSNs. Turk. J. Electr. Eng. Comput. Sci. 2017, 25, 605–621. [Google Scholar] [CrossRef]
- Heinzelman, W.; Chandrakasan, A.; Balakrishnan, H. Energy-efficient communication protocol for wireless microsensor networks. In Proceedings of the 33rd Annual Hawaii International Conference on System Sciences, Maui, HI, USA, 7 January 2000; Volume 2, p. 10. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MDG-NL | ZDG-MME | SPT-DGA | LP-RDA | MCRP | |
|---|---|---|---|---|---|
| Main Objective | To minimize the tour length | To minimize the tour length | To minimize the tour length | To minimize the tour length | tour length tour length |
| Technique | Minimize common turning points | Field Segmentation (Inner, Outer) | Minimize polling nodes | Minimize rendezvous nodes | Minimize rendezvous points |
| Applications | Delay tolerant | Delay intolerant | Delay tolerant | Delay tolerant | Delay tolerant |
| Segmentation Field | No | Yes | No | No | No |
| Data Delivery to the BS | Via mobile element | Via mobile and multi-hop | Via mobile element | Via mobile element | Via mobile element |
| No. of ME | One | One | One | One | One |
| Simulation Parameters | Values |
|---|---|
| Initial Energy (J) | 0.25 |
| Number of Sensor Nodes (N) | 100, 150, 200, 250, 300, 350, 400 |
| Transmission Range Tr (m) | 20, 25, 30, 35, 40, 45, 50 |
| Relay Hop Count d | 0, 1, 2, 3, 4, 5 |
| Mobile Velocity (m/s) | 1 |
| Packet Length K (bits) | 640 |
| Deployment Area Size L (m) | 150, 200 |
| Duty Cycle | 200 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghaleb, M.; Subramaniam, S.; Ghaleb, S.M. An Adaptive Data Gathering Algorithm for Minimum Travel Route Planning in WSNs Based on Rendezvous Points. Symmetry 2019, 11, 1326. https://doi.org/10.3390/sym11111326
Ghaleb M, Subramaniam S, Ghaleb SM. An Adaptive Data Gathering Algorithm for Minimum Travel Route Planning in WSNs Based on Rendezvous Points. Symmetry. 2019; 11(11):1326. https://doi.org/10.3390/sym11111326
Chicago/Turabian StyleGhaleb, Mukhtar, Shamala Subramaniam, and Safwan M. Ghaleb. 2019. "An Adaptive Data Gathering Algorithm for Minimum Travel Route Planning in WSNs Based on Rendezvous Points" Symmetry 11, no. 11: 1326. https://doi.org/10.3390/sym11111326
APA StyleGhaleb, M., Subramaniam, S., & Ghaleb, S. M. (2019). An Adaptive Data Gathering Algorithm for Minimum Travel Route Planning in WSNs Based on Rendezvous Points. Symmetry, 11(11), 1326. https://doi.org/10.3390/sym11111326