Analysis of a Poro-Thermo-Viscoelastic Model of Type III

 , and
, and 
Abstract
1. Introduction
2. The Thermo-Mechanical Problem and Its Variational Formulation
3. Fully Discrete Approximations: An a Priori Error Analysis
4. Numerical Simulations
4.1. Numerical Algorithm
4.2. A One-Dimensional Example: Numerical Convergence
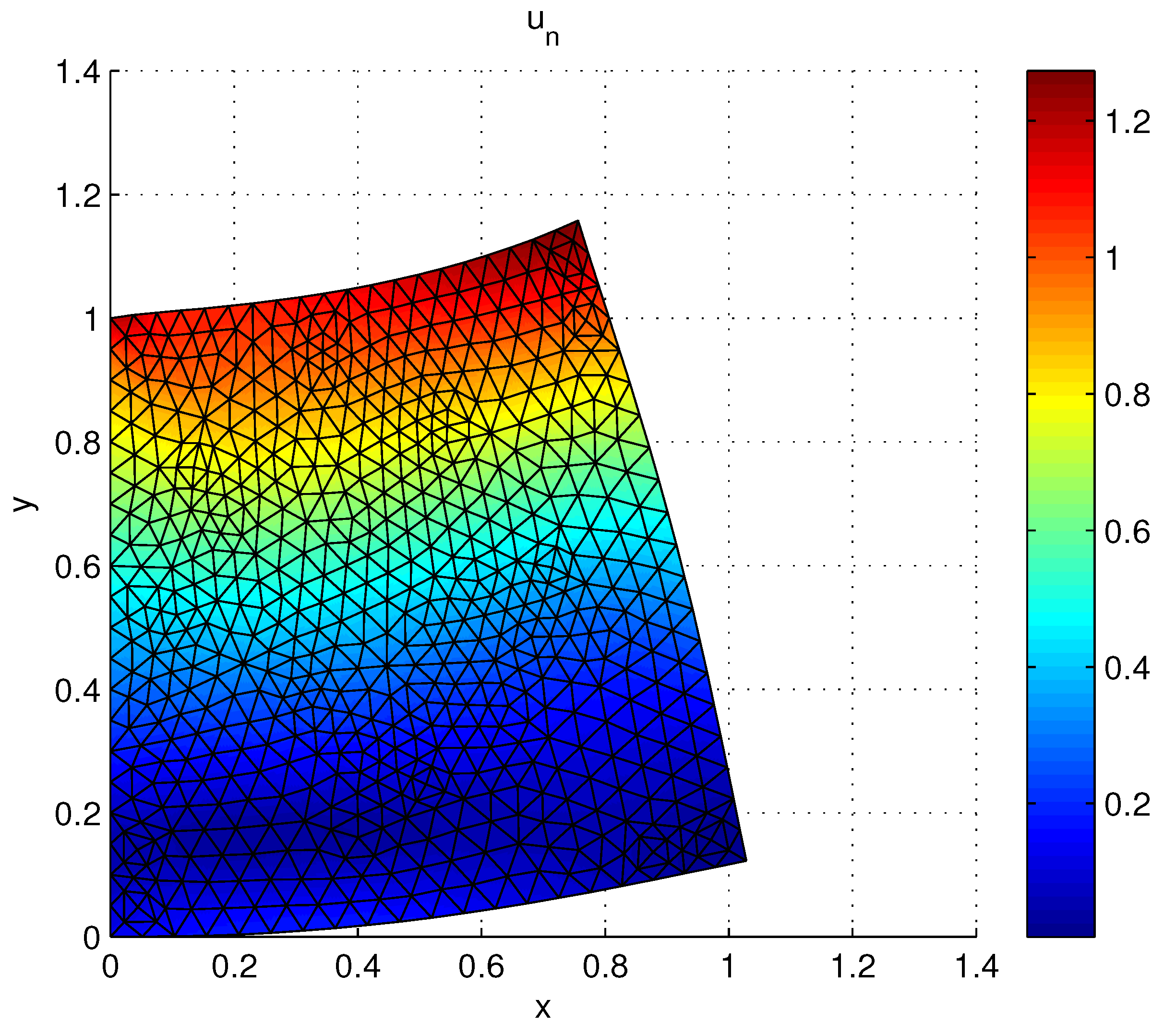
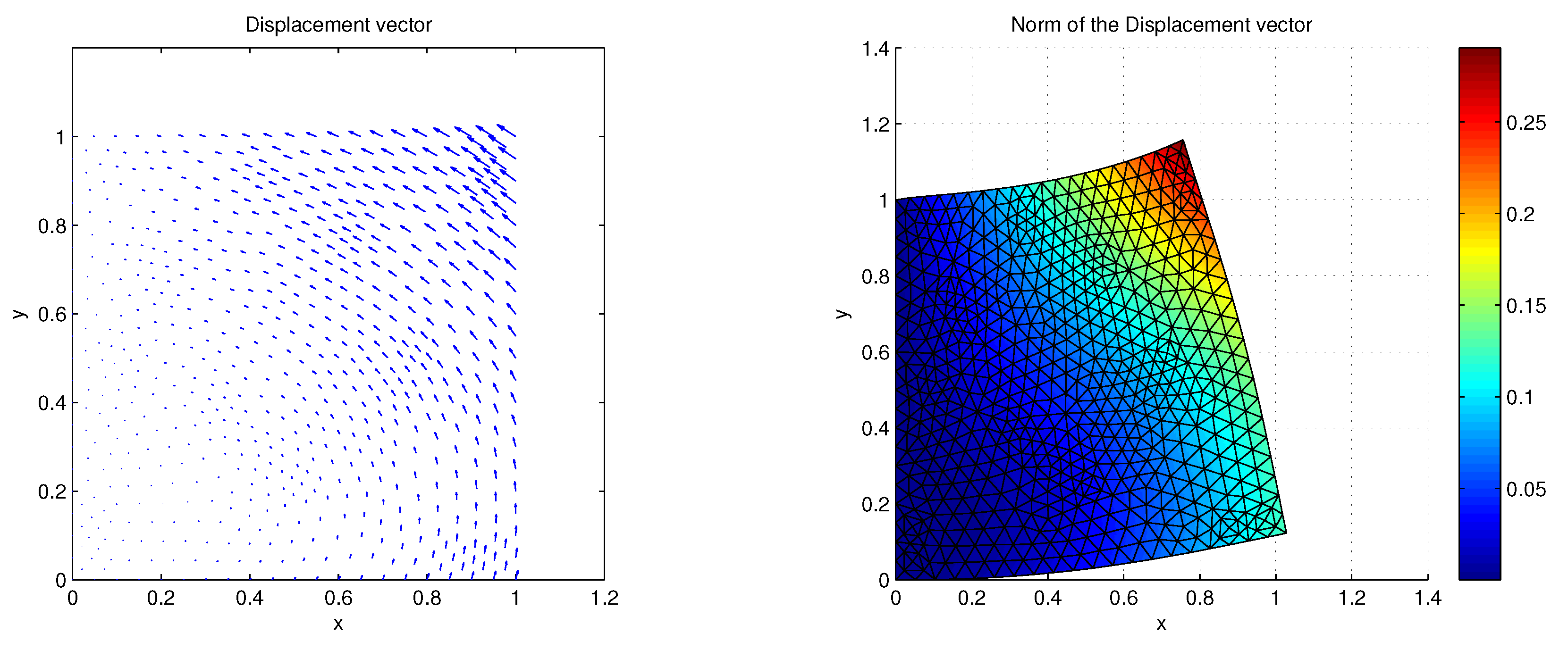
4.3. First Two-Dimensional Example: Application of a Surface Force
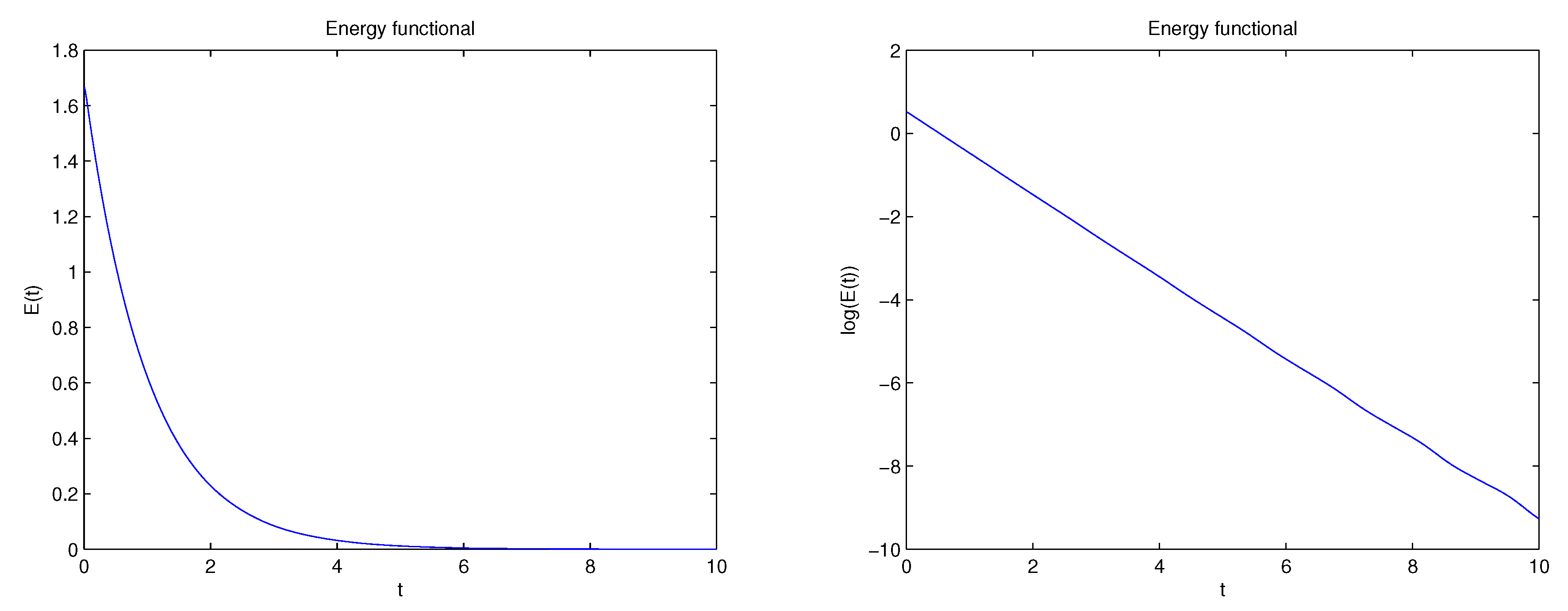
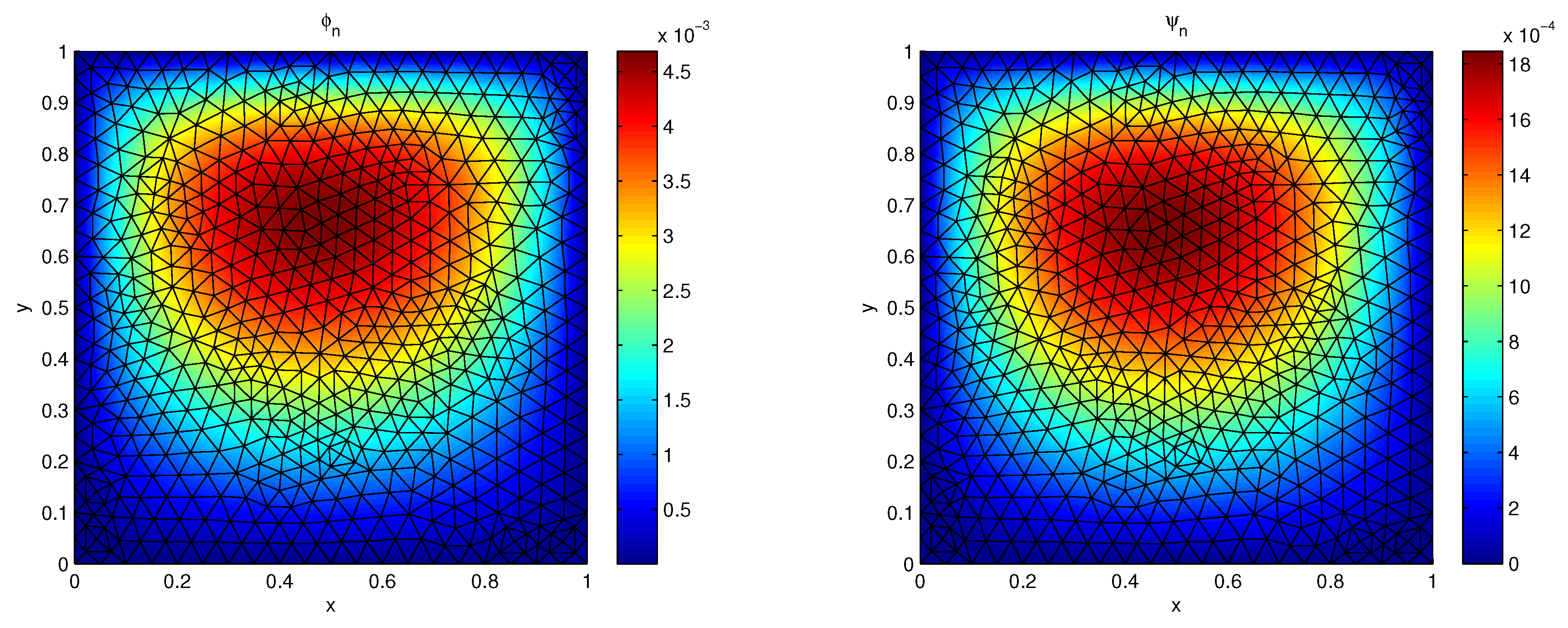
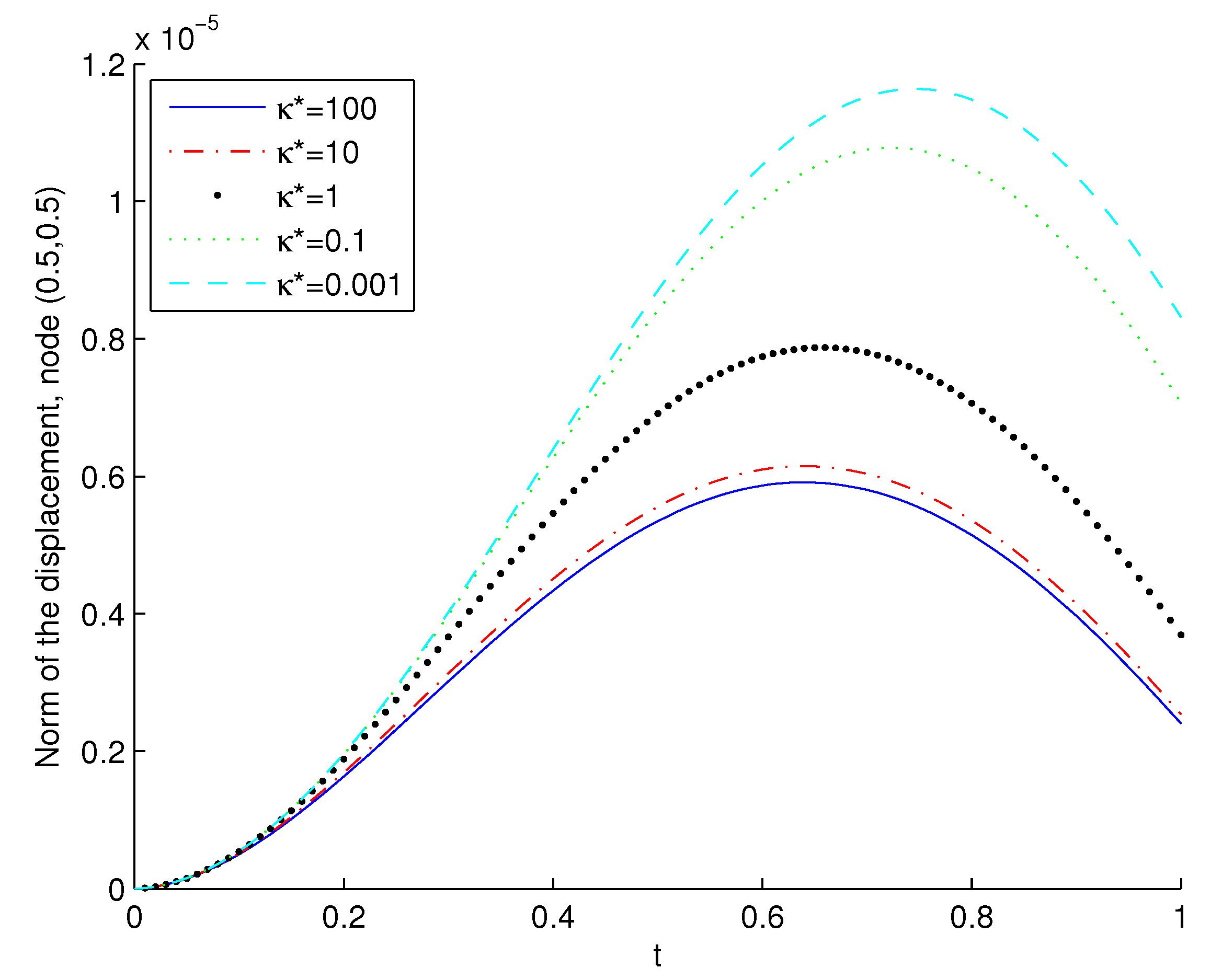
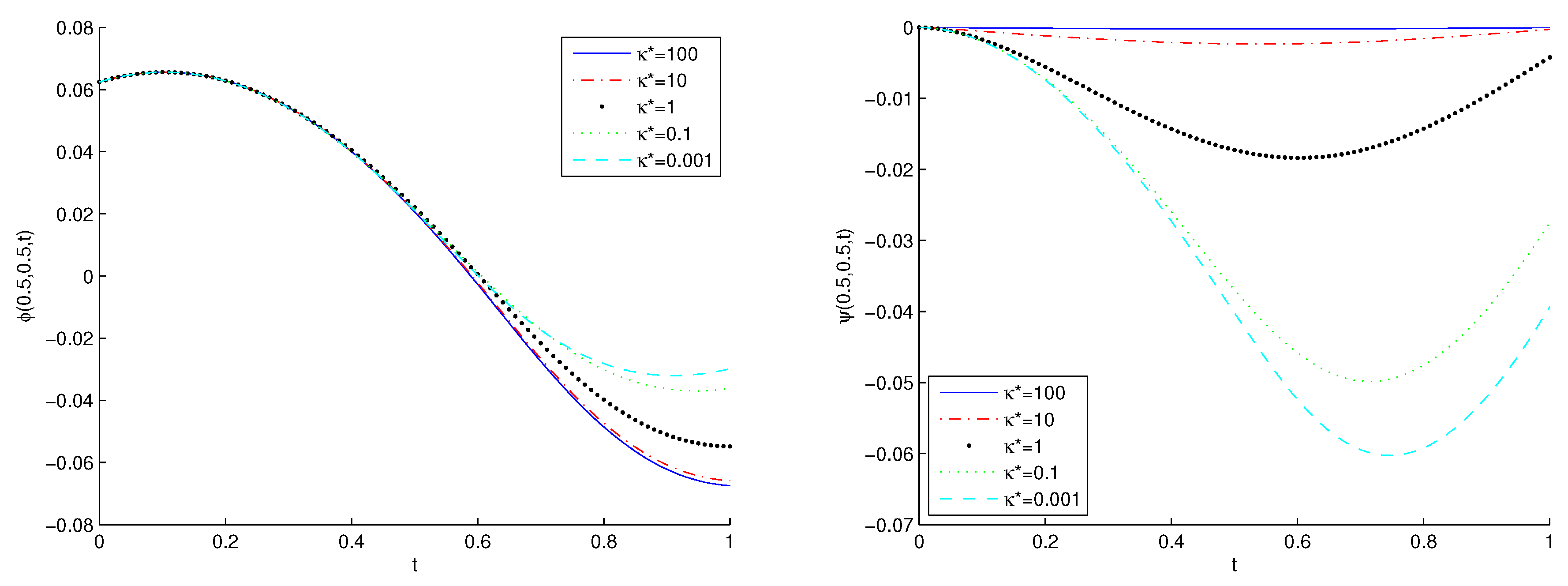
4.4. Second Two-Dimensional Example: Dependence on the Type III Thermal Coefficient
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cowin, S.C.; Nunziato, J.W. Linear elastic materials with voids. J. Elast. 1983, 13, 125–147. [Google Scholar] [CrossRef]
- Nunziato, J.W.; Cowin, S. A nonlinear theory of elastic materials with voids. Arch. Ration. Mech. Anal. 1979, 415, 175–201. [Google Scholar] [CrossRef]
- Aouadi, M. Uniqueness and existence theorems in thermoelasticity with voids without energy dissipation. J. Frankl. Inst. 2012, 349, 128–139. [Google Scholar]
- Aouadi, M.; Ciarletta, M.; Iovane, G. A porous thermoelastic diffusion theory of types II and III. Acta Mech. 2017, 228, 931–949. [Google Scholar] [CrossRef]
- Apalara, T.A. Exponential decay in one-dimensional porous dissipation elasticity. Quart. J. Mech. Appl. Math. 2017, 70, 360–372. [Google Scholar] [CrossRef]
- Bazarra, N.; Fernández, J.R. Numerical analysis of a contact problem in poro-thermoelasticity with microtemperatures. Z. Angew. Math. Mech. 2018, 98, 1190–2009. [Google Scholar] [CrossRef]
- Birsan, M.; Altenbach, H. The Korn-type inequality in a Cosserat model for thin thermoelastic porous rods. Meccanica 2012, 47, 789–794. [Google Scholar] [CrossRef]
- Casas, P.S.; Quintanilla, R. Exponential decay in one-dimensional porous-thermoelasticity. Mech. Res. Comm. 2012, 40, 652–658. [Google Scholar]
- Chirita, S.; Ciarletta, M.; Straughan, B. Structural stability in porous elasticity. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 2006, 462, 2593–2605. [Google Scholar] [CrossRef]
- Ciarletta, M.; Svanadze, M.; Buonnano, L. Plane waves and vibrations in the theory of micropolar thermoelasticity for materials with voids. Eur. J. Mech. A Solids 2009, 28, 897–903. [Google Scholar] [CrossRef]
- Fernández, J.R.; Masid, M. A porous thermoelastic problem: An a priori error analysis and computational experiments. Appl. Math. Comput. 2017, 305, 117–135. [Google Scholar] [CrossRef]
- Iesan, D. On the nonlinear theory of thermoviscoelastic materials with voids. J. Elast. 2017, 128, 1–16. [Google Scholar] [CrossRef]
- Klinkel, S.; Reichel, R. A finite element formulation in boundary representation for the analysis of nonlinear problems in solid mechanics. Comput. Methods Appl. Mech. Eng. 2019, 347, 295–315. [Google Scholar] [CrossRef]
- Magaña, A.; Quintanilla, R. On the time decay of solutions in one-dimensional theories of porous materials. Int. J. Solids Struct. 2006, 43, 3414–3427. [Google Scholar] [CrossRef]
- Marin, M. Some basic theorems in elastostatics of micropolar materials with voids. J. Comput. Appl. Math. 1996, 70, 115–126. [Google Scholar] [CrossRef]
- Marin, M. Weak solutions in elasticity of dipolar porous materials. Math. Probl. Eng. 2008, 2008, 158908. [Google Scholar] [CrossRef]
- Marin, M. An approach of a heat-flux dependent theory for micropolar porous media. Meccanica 2016, 51, 1127–1133. [Google Scholar] [CrossRef]
- Marin, M.; Chirila, A.; Öchsner, A.; Vlase, S. About finite energy solutions in thermoelasticity of micropolar bodies with voids. Bound. Value Probl. 2019, 2019, 89. [Google Scholar] [CrossRef]
- Pamplona, P.X.; Muñoz Rivera, J.E.; Quintanilla, R. On the decay of solutions for porous-elastic systems with history. J. Math. Anal. Appl. 2011, 379, 682–705. [Google Scholar] [CrossRef]
- Pamplona, P.X.; Muñoz Rivera, J.E.; Quintanilla, R. Analyticity in porous-thermoelasticity with microtemperatures. J. Math. Anal. Appl. 2012, 394, 645–655. [Google Scholar] [CrossRef]
- Iesan, D. Thermoelastic Models of Continua; Kluwer: Alphen aan den Rijn, The Netherlands, 2004. [Google Scholar]
- Straughan, B. Mathematical Aspects of Multi-Porosity Continua; Springer: Berlin, Germany, 2017. [Google Scholar]
- Green, A.E.; Naghdi, P.M. A unified procedure for contruction of theories of deformable media. I Classical continuum physics, II Generalized continua, III Mixtures of interacting continua. Proc. R. Soc. A 1995, 448, 335–356, 357–377, 379–388. [Google Scholar] [CrossRef]
- Fareh, A.; Messaoudi, S.A. Stabilization of a type III thermoelastic Timoshenko system in the presence of a time-distributed delay. Math. Nachr. 2017, 290, 1017–1032. [Google Scholar] [CrossRef]
- Jorge, M.; Pinheiro, S.B. Improvement on the polynomial stability for a Timoshenko system with type III thermoelasticity. Appl. Math. Lett. 2019, 96, 95–100. [Google Scholar] [CrossRef]
- Magaña, A.; Quintanilla, R. Exponential stability in type III thermoelasticity with microtemperatures. Z. Angew. Math. Phys. 2018, 69, 129. [Google Scholar] [CrossRef]
- Miranville, A.; Quintanilla, R. Exponential decay in one-dimensional type III thermoelasticity with voids. Appl. Math. Lett. 2019, 94, 30–37. [Google Scholar] [CrossRef]
- Mustafa, M.I. A uniform stability result for thermoelasticity of type III with boundary distributed delay. J. Math. Anal. Appl. 2014, 415, 148–158. [Google Scholar] [CrossRef]
- Prasad, R.; Das, S.; Mukhopadhyay, S. A two-dimensional problem of a mode I crack in a type III thermoelastic medium. Math. Mech. Solids 2013, 18, 506–523. [Google Scholar] [CrossRef]
- Bazarra, N.; Fernández, J.R.; Quintanilla, R. Analysis of a thermoelastic problem of type III. 2019; 277–285, unpublished work. [Google Scholar]
- Iesan, D.; Quintanilla, R. On thermoelastic bodies with inner structure and microtemperatures. J. Math. Anal. Appl. 2009, 354, 12–23. [Google Scholar] [CrossRef]
- Bazarra, N.; Fernández, J.R.; Leseduarte, M.C.; Magaña, A.; Quintanilla, R. On the uniqueness and analyticity in viscoelasticity with double porosity. Asymptot. Anal. 2019, 112, 151–164. [Google Scholar] [CrossRef]
- Clement, P. Approximation by finite element functions using local regularization. RAIRO Math. Model. Numer. Anal. 1975, 9, 77–84. [Google Scholar] [CrossRef]
- Andrews, K.T.; Fernández, J.R.; Shillor, M. Numerical analysis of dynamic thermoviscoelastic contact with damage of a rod. IMA J. Appl. Math. 2005, 70, 768–795. [Google Scholar]
- Campo, M.; Fernández, J.R.; Kuttler, K.L.; Shillor, M.; Viaño, J.M. Numerical analysis and simulations of a dynamic frictionless contact problem with damage. Comput. Methods Appl. Mech. Eng. 2006, 196, 476–488. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.01 | 0.005 | 0.002 | 0.001 | 0.0005 | 0.0002 | 0.0001 | |
|---|---|---|---|---|---|---|---|
| 0.434612 | 0.432825 | 0.431788 | 0.431452 | 0.431287 | 0.431188 | 0.431155 | |
| 0.210312 | 0.207822 | 0.206588 | 0.206216 | 0.206038 | 0.205935 | 0.205902 | |
| 0.107268 | 0.103366 | 0.101371 | 0.100897 | 0.100692 | 0.100580 | 0.100545 | |
| 0.057972 | 0.053438 | 0.050939 | 0.050182 | 0.049865 | 0.049725 | 0.049685 | |
| 0.034160 | 0.029016 | 0.026254 | 0.025397 | 0.024994 | 0.024772 | 0.024714 | |
| 0.023231 | 0.017132 | 0.014037 | 0.013122 | 0.012688 | 0.012438 | 0.012359 | |
| 0.018869 | 0.011671 | 0.008032 | 0.007020 | 0.006560 | 0.006299 | 0.006215 | |
| 0.017445 | 0.009490 | 0.005197 | 0.004018 | 0.003510 | 0.003236 | 0.003149 | |
| 0.017049 | 0.008778 | 0.004000 | 0.002601 | 0.002010 | 0.001708 | 0.001618 | |
| 0.016947 | 0.008580 | 0.003583 | 0.002003 | 0.001301 | 0.00052 | 0.000854 | |
| 0.016921 | 0.008529 | 0.003462 | 0.001794 | 0.001002 | 0.000589 | 0.000476 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bazarra, N.; López-Campos, J.A.; López, M.; Segade, A.; Fernández, J.R. Analysis of a Poro-Thermo-Viscoelastic Model of Type III. Symmetry 2019, 11, 1214. https://doi.org/10.3390/sym11101214
Bazarra N, López-Campos JA, López M, Segade A, Fernández JR. Analysis of a Poro-Thermo-Viscoelastic Model of Type III. Symmetry. 2019; 11(10):1214. https://doi.org/10.3390/sym11101214
Chicago/Turabian StyleBazarra, Noelia, José A. López-Campos, Marcos López, Abraham Segade, and José R. Fernández. 2019. "Analysis of a Poro-Thermo-Viscoelastic Model of Type III" Symmetry 11, no. 10: 1214. https://doi.org/10.3390/sym11101214
APA StyleBazarra, N., López-Campos, J. A., López, M., Segade, A., & Fernández, J. R. (2019). Analysis of a Poro-Thermo-Viscoelastic Model of Type III. Symmetry, 11(10), 1214. https://doi.org/10.3390/sym11101214