Degree Reduction of S-λ Curves Using a Genetic Simulated Annealing Algorithm

Abstract
1. Introduction
2. Definition of S-λ Curves
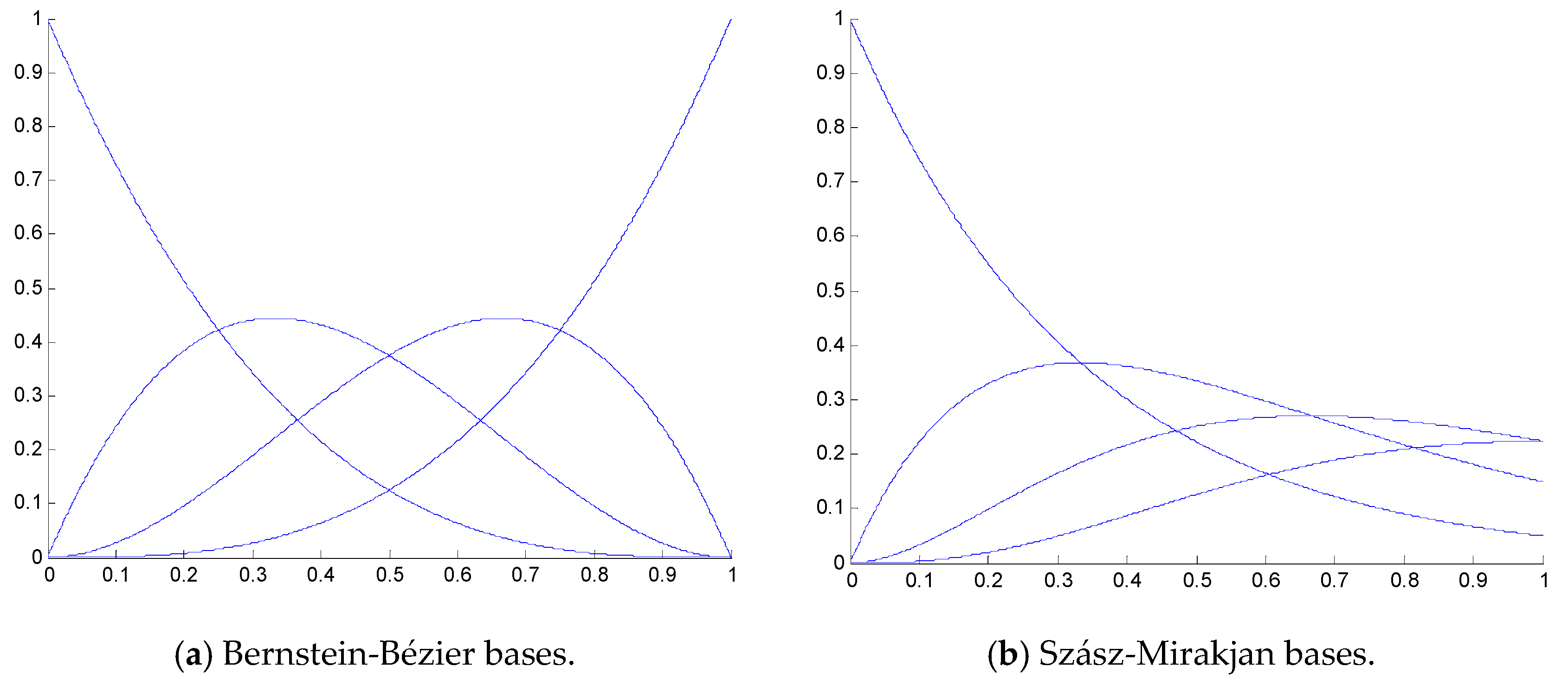
2.1. S-λ Distributions and Basis Functions
2.2. S-λ Curves
3. Degree Reduction of S-λ Curves Using an Intelligent Algorithm
3.1. The Degree Reduction Problem
3.2. Basic Principles of the Degree Reduction for S-λ Curve
3.2.1. Elementary Algorithms
3.2.2. Initialization of the Control Parameters and the Group
3.2.3. Selection of a Fitness Function
3.2.4. Selection
3.2.5. Crossover
3.2.6. Mutation
3.2.7. Termination Conditions
3.2.8. Setting Parameters
3.3. The Procedure of the Degree Reduction for S-λ Curve
3.4. Results and Discussions
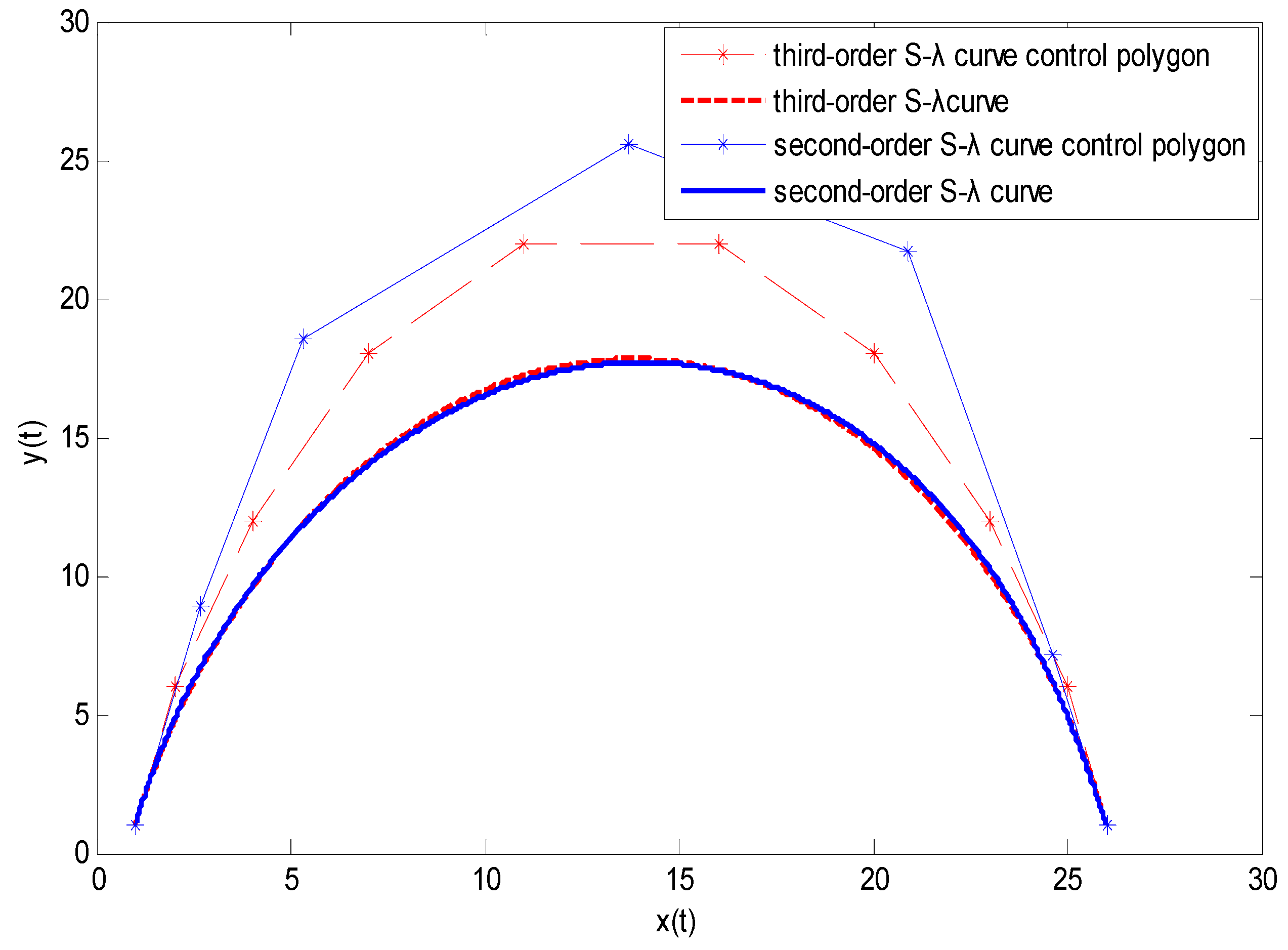
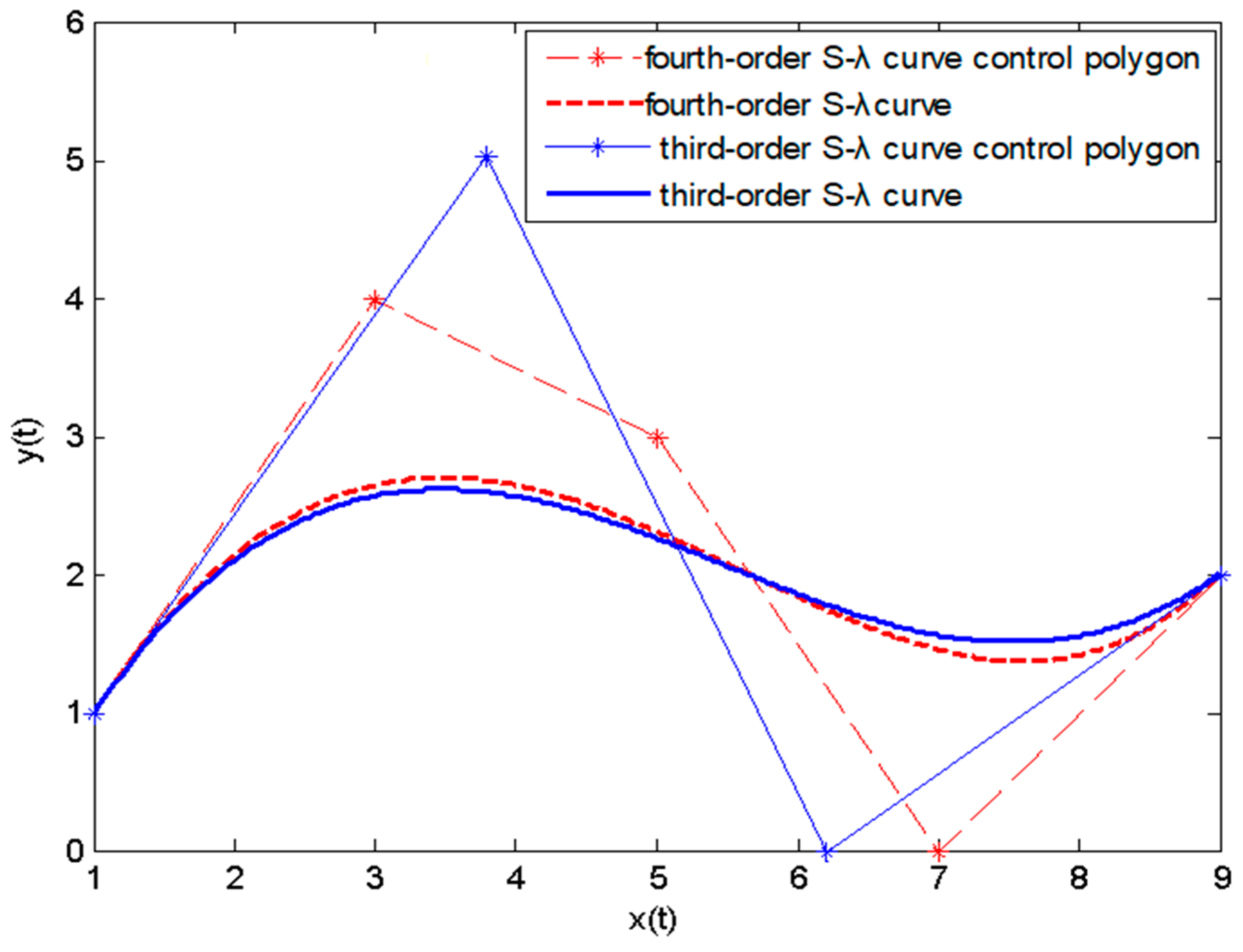
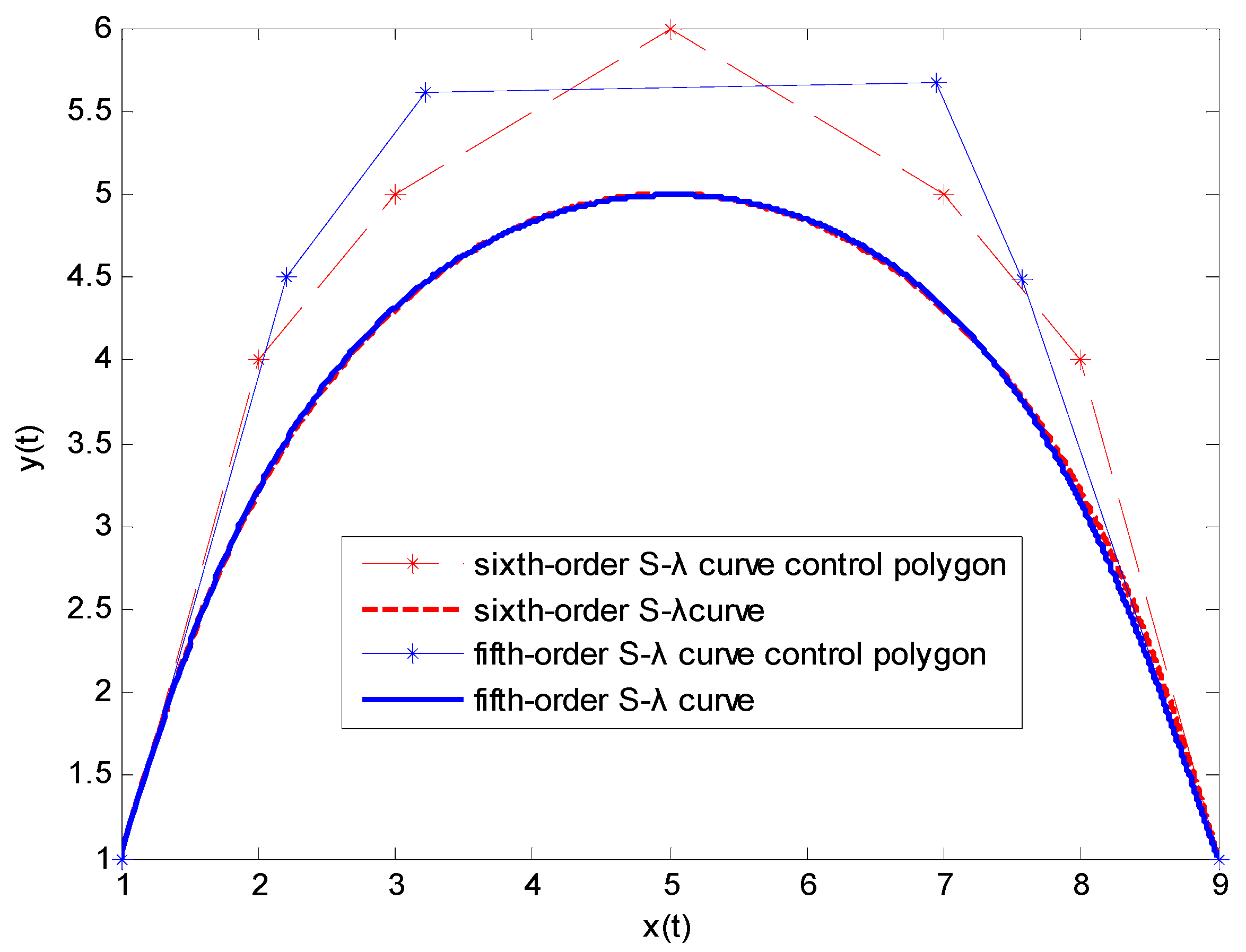
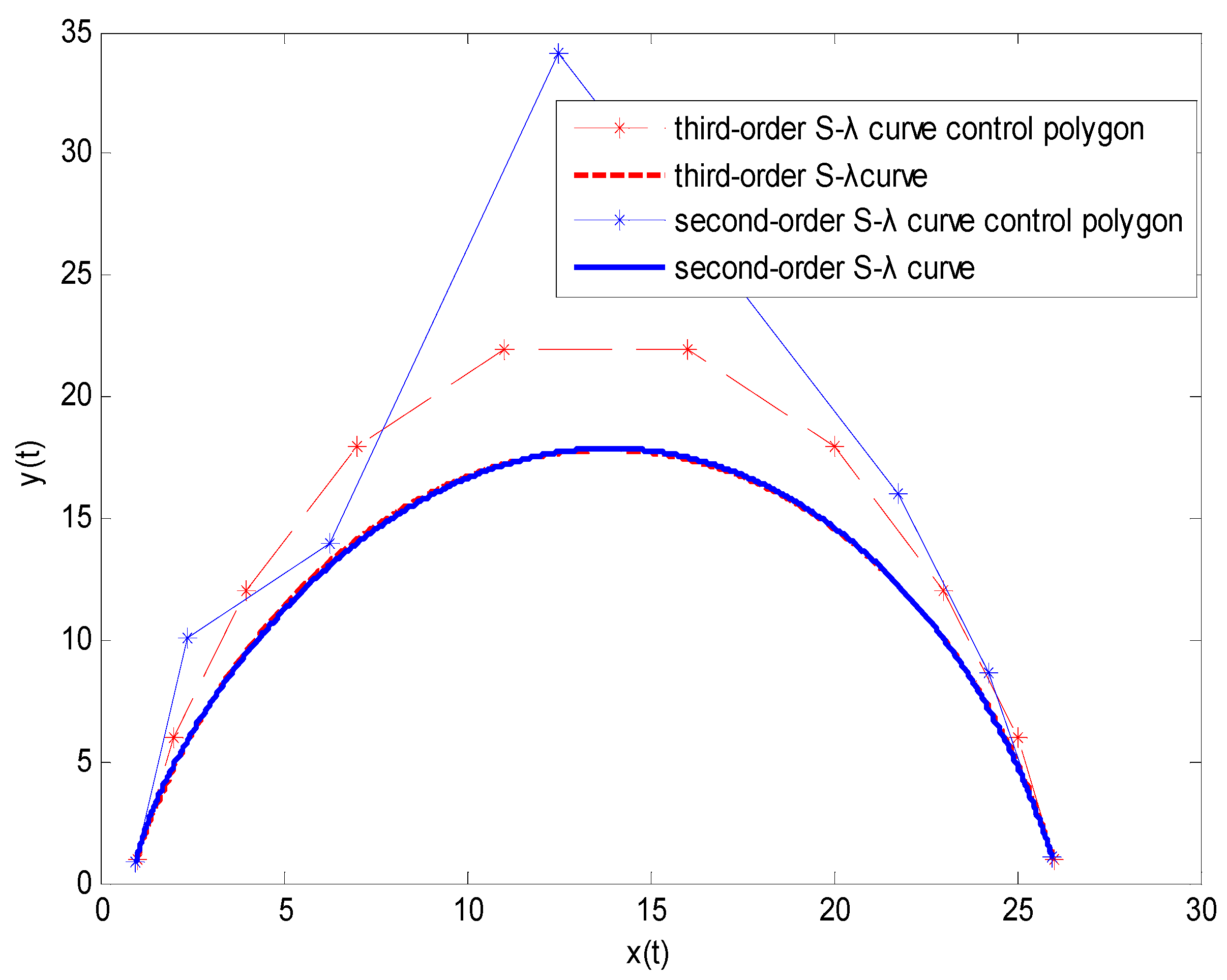
3.4.1. Degree Reduction of S-λ Curves with Fixed Endpoints
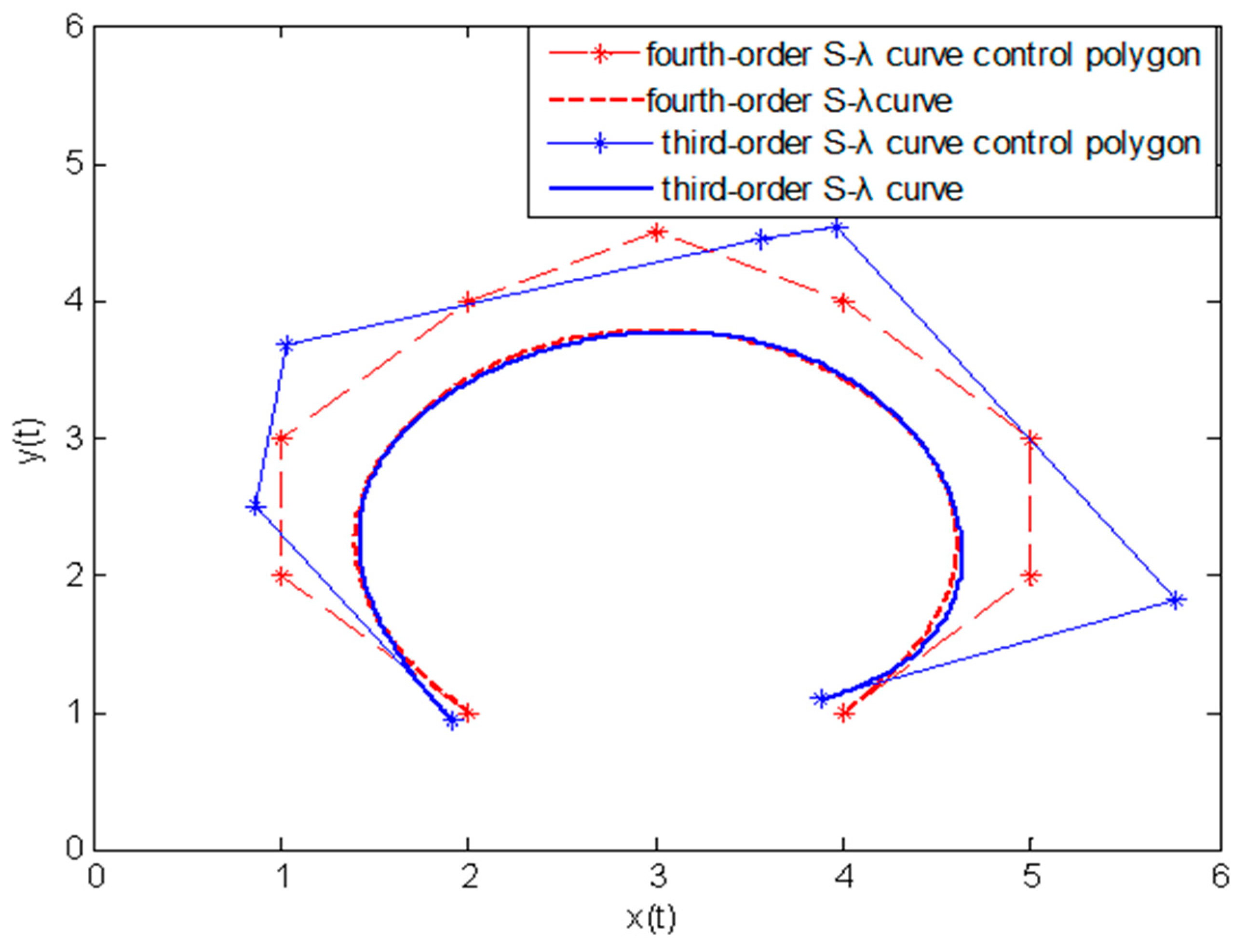
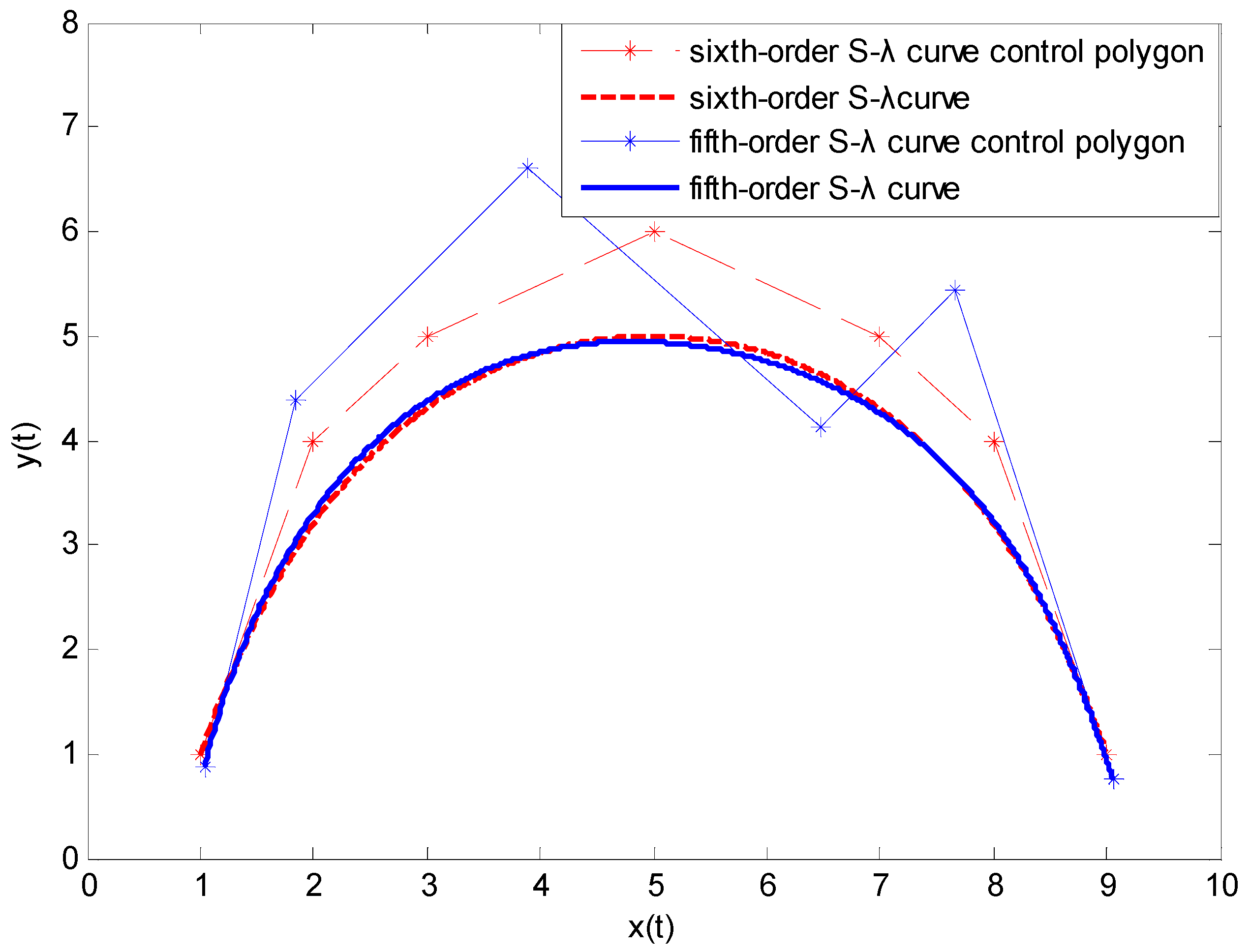
3.4.2. Degree Reduction of S-λ Curves with Unconstrained Endpoint
3.4.3. Quantitative Evaluation of the Degree Reduction Algorithm
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Johnson, N.L.; Kemp, A.W.; Kotz, S. Univariate Discrete Distributions; John Wiley & Sons: New York, NY, USA, 2005. [Google Scholar]
- Dahmen, W.; Micchelli, C.A. Statistical encounters with B-splines. Contemp. Math. 1986, 59, 17–48. [Google Scholar]
- Goldman, R.N. Urn models and B-splines. Constr. Approx. 2000, 4, 265–288. [Google Scholar] [CrossRef]
- Hu, G.; Bo, C.; Wu, J.; Wei, G.; Hou, F. Modeling of Free-Form Complex Curves Using SG-Bézier Curves with Constraints of Geometric Continuities. Symmetry 2018, 10, 545. [Google Scholar] [CrossRef]
- Hu, G.; Wu, J.L.; Qin, X.Q. A novel extension of the Bézier model and its applications to surface modeling. Adv. Eng. Softw. 2018, 125, 27–54. [Google Scholar] [CrossRef]
- Hu, G.; Wu, J.L.; Qin, X.Q. A new approach in designing of local controlled developable H-Bézier surfaces. Adv. Eng. Softw. 2018, 121, 26–38. [Google Scholar] [CrossRef]
- Hu, G.; Cao, H.X.; Zhang, S.X.; Guo, W. Developable Bézier-like surfaces with multiple shape parametersand its continuity conditions. Appl. Math. Model. 2017, 45, 728–747. [Google Scholar] [CrossRef]
- Goldman, R.N. The rational Bernstein bases and the multirational blossoms. Comput. Aided Geom. Des. 1999, 16, 701–738. [Google Scholar] [CrossRef]
- Hahn, L. Approximation by operators of probabilistic type. J. Approx. Theory 1980, 30, 1–10. [Google Scholar] [CrossRef]
- Khan, R.A. Some probabilistic methods in the theory of approximation operators. Acta Math. Sci. Hung. 1980, 35, 193–203. [Google Scholar] [CrossRef]
- Omey, E. Operators of probabilistic type. Theory Probab. Appl. 1996, 41, 219–225. [Google Scholar] [CrossRef]
- De La Cal, J. On Stancu-Mühlbach operators and some connected problems concerning probability distributions. J. Approx. Theory 1993, 74, 59–68. [Google Scholar] [CrossRef]
- Zeng, X.M. Approximation properties of Gamma operators. J. Math. Anal. Appl. 2005, 311, 389–401. [Google Scholar] [CrossRef]
- Zeng, X.M.; Cheng, F. On the rate of approximation of Bernstein type operators. J. Approx. Theory 2001, 109, 242–256. [Google Scholar] [CrossRef]
- Fan, F.L.; Zeng, X.M. S-λ bases and S-λ curves. Comput. Aided Des. 2012, 44, 1049–1055. [Google Scholar] [CrossRef]
- Watkins, M.A.; Worsey, A.J. Degree reduction of Bézier curves. Comput. Aided Des. 1988, 20, 398–405. [Google Scholar] [CrossRef]
- Lutterkort, D.; Peters, J.; Reif, U. Polynomial degree reduction in the L2-norm equals best Euclidean approximation of Bézier coefficients. Comput. Aided Geom. Des. 1999, 16, 607–612. [Google Scholar] [CrossRef]
- Ren, S.L.; Zhang, K.Y.; Ye, Z.L. Matrix representation for degree reduction of Bézier curves. J. Eng. Math. 2007, 24, 1007–1014. [Google Scholar]
- Cai, H.J.; Wang, G.J. Constrained approximation of rational Bézier curves based on a matrix expression of its end points continuity condition. Comput. Aided Des. 2010, 42, 495–504. [Google Scholar] [CrossRef]
- Ahn, Y.J.; Lee, B.G.; Park, Y.; Yoo, J. Constrained polynomial degree reduction in the L2-norm equals best weighted Euclidean approximation of Bézier coefficients. Comput. Aided Geom. Des. 2004, 21, 181–191. [Google Scholar] [CrossRef]
- Lu, L.Z.; Hu, Q.Q.; Wang, G.Z. An iterative algorithm for degree reduction of Bézier curves. J. Comput. Aided Des. Comput. Graph. 2009, 21, 1689–1693. [Google Scholar]
- Lu, L.Z.; Wang, G.Z. Optimal multi-degree reduction of Bézier curves with G2-continuity. Comput. Aided Geom. Des. 2006, 23, 673–683. [Google Scholar] [CrossRef]
- Delgado, J.; Pena, J.M. Progressive iterative approximation and bases with the fastest convergence rates. Comput. Aided Geom. Des. 2007, 24, 10–18. [Google Scholar] [CrossRef]
- Ait-Haddou, R.; Bartoň, M. Constrained multi-degree reduction with respect to Jacobi norms. Comput. Aided Geom. Des. 2016, 42, 23–30. [Google Scholar] [CrossRef]
- Liang, X.X.; Zhang, C.M.; Lin, X. Constrained degree reduction of Bézier curve in L∞ Norm using basic curve and correction curve. J. Comput. Aided Des. Comput. Graph. 2006, 18, 401–405. [Google Scholar]
- Rababah, A.; Lee, B.G.; Yoo, J. A simple matrix form for degree reduction of Bézier curves using Chebyshev–Bernstein basis transformations. Appl. Math. Comput. 2006, 181, 310–318. [Google Scholar] [CrossRef]
- Lu, L.Z.; Wang, G.Z. Application of Chebyshev II-Bernstein basis transformations to degree reduction of Bézier curves. J. Comput. Appl. Math. 2008, 221, 52–65. [Google Scholar] [CrossRef][Green Version]
- Xu, S.P.; Bai, S.X.; Xiong, Y.H.; Zeng, W. Degree reduction of Bézier curves with constraints of asymmetry parametric endpoints continuity. J. Eng. Graph. 2008, 5, 91–97. [Google Scholar]
- Wang, W.T. Degree reduction of C-Bézier curves. J. Zhejiang Univ. Sci. A 2009, 36, 396–400. [Google Scholar]
- Qin, X.Q.; Wang, W.W.; Hu, G. Degree reduction of C-Bézier curve based on genetic algorithm. Comput. Eng. Appl. 2013, 49, 174–181. [Google Scholar]
- Khuda Bux, N.; Lu, M.; Wang, J.; Hussain, S.; Aljeroudi, Y. Efficient Association Rules Hiding Using Genetic Algorithms. Symmetry 2018, 10, 576. [Google Scholar] [CrossRef]
- Caponetto, R.; Fortuna, L.; Graziani, S.; Xibilia, M.G. Genetic algorithms and applications in system engineering: A survey. Trans. Inst. Meas. Control 1993, 15, 143–156. [Google Scholar] [CrossRef]
- Lange, K. Poisson Approximation. In Geometric Modeling and Processing 2000. Theory and Applications. Proceedings; IEEE: Piscataway, NJ, USA, 2000; pp. 141–149. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, J.; Qin, X. Degree Reduction of S-λ Curves Using a Genetic Simulated Annealing Algorithm. Symmetry 2019, 11, 15. https://doi.org/10.3390/sym11010015
Lu J, Qin X. Degree Reduction of S-λ Curves Using a Genetic Simulated Annealing Algorithm. Symmetry. 2019; 11(1):15. https://doi.org/10.3390/sym11010015
Chicago/Turabian StyleLu, Jing, and Xinqiang Qin. 2019. "Degree Reduction of S-λ Curves Using a Genetic Simulated Annealing Algorithm" Symmetry 11, no. 1: 15. https://doi.org/10.3390/sym11010015
APA StyleLu, J., & Qin, X. (2019). Degree Reduction of S-λ Curves Using a Genetic Simulated Annealing Algorithm. Symmetry, 11(1), 15. https://doi.org/10.3390/sym11010015