1. Introduction
The study of developable surfaces has many practical applications. There is much literature about developable surfaces, (see, e.g., [
1,
2,
3,
4,
5]). Many cartographic projections involve projecting the Earth onto a developable surface and then “unrolling” the surface into a region on the plane. Since developable surfaces may be constructed by bending flat sheets, they are also important in manufacturing objects from cardboard, plywood, and sheet metal. In mathematics, developable surfaces are typically defined as surfaces which can be developed into planes without distorting the surface metric. There is some literature about developable surfaces of space curves from the viewpoint of singularity theory [
1,
2]. The
tangent developable surface of a space curve is a ruled surface, which is formed by the space curve’s tangent lines. In algebraic geometry, tangent developable surfaces play an important role in the duality theory [
6]. In [
1], the author investigated the relationship between the singularities of tangent developable surfaces and some types of space curves. He also gave a classification of tangent developable surfaces by using the local topological property. On the other hand, S. Izumiya et al. introduced the rectifying developable surfaces of space curves in [
2], where they showed that a regular curve is a geodesic of its rectifying developable surface and revealed the relationship between singularities of the rectifying developable surface and geometric invariants. The geometric invariants can also characterize the contact between a space curve and a helix. In this sense, the study of the singularities of developable surfaces is an interesting subject.
In the present paper, we investigate one-parameter developable surfaces, which are related to the space curves, as a fundamental case for the research of the highest dimensional manifolds in Euclidean 3-space. We investigated the singularities of hypersurfaces in semi-Euclidean space [
7,
8,
9,
10]. However, at least to the best of our knowledge, there exists little literature concerning the singularities of one-parameter developable surfaces related to regular space curves in Euclidean space. Therefore, we study this problem in the present paper. In the frame of space curves, we define one-parameter developable surfaces. When the parameter is fixed, the sections of one-parameter developable surfaces are developable surfaces. Moreover, the tangent developable surfaces and the rectifying developable surfaces are sections of one-parameter developable surfaces. We also define the one-parameter support functions on regular space curves, which can be used to study the geometric properties of one-parameter developable surfaces. In fact, one-parameter developable surfaces are the discriminant sets of these functions. The main result, Theorem 2, shows that the singularities of developable surfaces are
-singularities
of these functions.
The organization of this paper is as follows: We review the concepts of ruled surfaces in Euclidean space in
Section 2. In
Section 3, the one-parameter developable surfaces of a space curve are defined, and we obtain two geometric invariants of the curve. We also get singularities of one-parameter developable surfaces (Theorem 1), and Theorem 2 gives the classification of these singularities in this section. The preparations for the proof of Theorem 2 are in
Section 4 and
Section 5. In the last section, we give some examples to illustrate the main results in this paper.
2. Basic Notation
Let
be 3-dimensional Euclidean space and
. We denote their standard inner product by
, and the norm of
is denoted by
. Let
be a curve and the tangent vector respect to
t is
. The
arc-length is
and
. We define three unit vectors
,
, and
. Then, the Frenet-Serret formula is as follows:
where
is the curvature function and
is the torsion function.
We now introduce developable surfaces and ruled surfaces. Suppose that
be a curve and
be a
-mapping. A surface
is defined by
then
is a
ruled surface, and
and
are called the
base curve and
director curve, respectively. For a fixed
,
is the
ruling. A
developable surface is a ruled surface with vanishing Gaussian curvature. It’s well known that
is a developable surface if and only if
.
is called a
cylinder if the director curve
has a fixed direction. We denote that
, then
is a cylinder if and only if
. If a ruled surface
is not a cylinder, a
striction curve of
is defined by
It is known that the singularities of ruled surface
(not a cylinder) are located on its striction curve [
11]. We say
is a
cone if and only if the striction curve
is constant.
3. One-Parameter Developable Surfaces
We consider the one-parameter developable surfaces of space curves in this section. Let
be a space curve. We consider a spherical vector
, which is defined by
where
. We assume, throughout the whole paper, that
for any
. We write
, and define a map
by
We call
a
one-parameter developable surface of
. We can easily check that
is the tangent developable surface of
and
is the rectifying developable surface of
.
For any
, we have
So, we have
for all
. This means
is a developable surface. For this reason, we call
the one-parameter developable surfaces of
. Moreover, we introduce two invariants as follows:
Since
so that
if and only if
. We can also calculate that
Thus, that
is a singular point of
is equivalent to
If and is a singular point of , then we have ; that is, has no singular points on the base curve . We have the following result for and :
Theorem 1. Let be a unit speed curve. Then the following holds:
(A) For any , the following statements are equivalent:
- (1)
is a cylinder,
- (2)
for all.
(B) If for all , then the following statements are equivalent:
- (3)
is a conical surface,
- (4)
for all.
(C) The singularities of one-parameter developable surfaces are , and Proof. (A) By definition, the developable surface is a cylinder if and only if the director vector is a constant vector and
is the director vector of
. Since
then
is a cylinder if and only if
for all
.
(B) We consider the striction curve
which is defined by
Then (B)-(3) is equivalent to
, for all
. We can calculate that
It follows that (B)-(3) and (B)-(4) are equivalent.
(C) By straightforward calculation, we have
We can obtain the singularities of
if the above three vectors are linearly dependent, which is equivalent to
This means that
or
or
Therefore, (C) holds. □
We give relationships between the singularities of one-parameter developable surfaces of unit speed curves and the above two invariants, as follows:
Theorem 2. Let be a space curve. Then, we have the following:
(1) is a regular point of if and only if (2) Suppose is a singular point of , then is locally diffeomorphic to the cuspidal edge at if
- (i)
,
andor- (ii)
and
(3) Suppose is a singular point of , then is locally diffeomorphic to the swallowtail at if , , andHere is the swallowtail, is the cusp and is the cuspidal edge (see Figure 1, Figure 2 and Figure 3). 4. One-Parameter Support Functions
For a space curve
, we introduce a function
by
.
G is called the
one-parameter support function of
, with respect to the unit normal vector
. We denote
for any
. Then, we have the following proposition:
Proposition 3. Let be a unit speed curve and the one-parameter support function. Then, the following statements hold:
(1) if and only if there exist such that (2) if and only if there exists , such that (A) Suppose . Then, we have the following:
(3) if and only if (4) if and only if and (5) if and only if and (B) Suppose . Then, the following statements hold:
(6) if and only if and there exists , such that (7) if and only if and Proof. Since
, we have the following:
By definition,
if and only if
and
, where
. We write
and
, where
v is a real number. Then, we have
Therefore, (1) holds.
By (i),
if and only if
and
. Since
and
, then there exists
such that
Therefore, (2) holds.
By (ii),
if and only if there exists
, such that
and
It follows
Thus,
and
or
and
. This completes the proof of (A)-(3) and (B)-(6).
Suppose
. By (iii), we have
if and only if
and
We rewrite
as following:
Therefore, we have (A)-(4). By similar arguments as above, we have (A)-(5).
Suppose
. By (iii),
if and only if
and
where
. Since
and
, we have
Therefore, we obtain (B)-(7). □
5. Unfoldings of One-Parameter Support Functions
In this section, by using the unfolding theory of functions, we give a classification for singularities of the one-parameter developable surface of .
Suppose that
be a function germ, and write
.
F is called an
r-
of
f. We say that
f has an
-singularity at
if
, for all
and
. If
, for all
, we also say that
f has an
-singularity at
. Suppose
f has an
-singularity
at
and
F be an
r-parameter unfolding of
f; then, we write the
-jet of
at
as
We call
F an
R-
of
f if the rank of
matrix
is
k , where
. The
of
F is defined to be
A well-known classification [
12,
13,
14,
15] follows.
Theorem 4. Let have -singularity at and be an r-parameter unfolding of . If F is an R-versal unfolding of f, then we have the following statements:
(1) If , then is locally diffeomorphic to .
(2) If , then is locally diffeomorphic to .
By Proposition 3, we get the discriminant set of the one-parameter support function
, as follows:
We have the following proposition:
Proposition 5. Let be a space curve. If has the -singularity at and for , then is an R-versal unfolding of .
Proof. Let
,
and
. Then, we have
and
Therefore, the 2-jet is as follows:
We consider the following
matrix:
By the Frenet-Serret formula, we have
Since the orthonormal frame
is a basis of
, then the rank of
is equal to the rank of
This means rank
, if and only if
The above inequality is equivalent to
. Moreover, the rank of
is always two, under the condition
.
Therefore, G is an R-versal unfolding of if has -singularity at . □
Proof of Theorem 2. By direct calculation, we have
Then, that
is a regular point of
is equivalent to
Thus, statement (1) holds.
By Proposition 3-(2), is the image of the one-parameter developable surfaces of .
Suppose
. By Proposition 3-(A)-(3), (4), and (5),
has an
-type singularity (respectively, an
-type singularity) at
if and only if
and
(respectively,
,
and
). By Theorem 4 and Proposition 5, we have (2)-(i) and (3).
Suppose
. By Proposition 3-(B)-(6) and (7),
has an
-type singularity if and only if
and
Following from Theorem 4 and Proposition 5, we obtain (2)-(ii). This completes the proof. □
6. Examples
In this section, we construct the one-parameter developable surfaces associated with a space curve and two sections of the one-parameter developable surfaces. The two sections are the tangent developable surface and the rectifying developable surface of the curve. They are also the wavefronts of the curve.
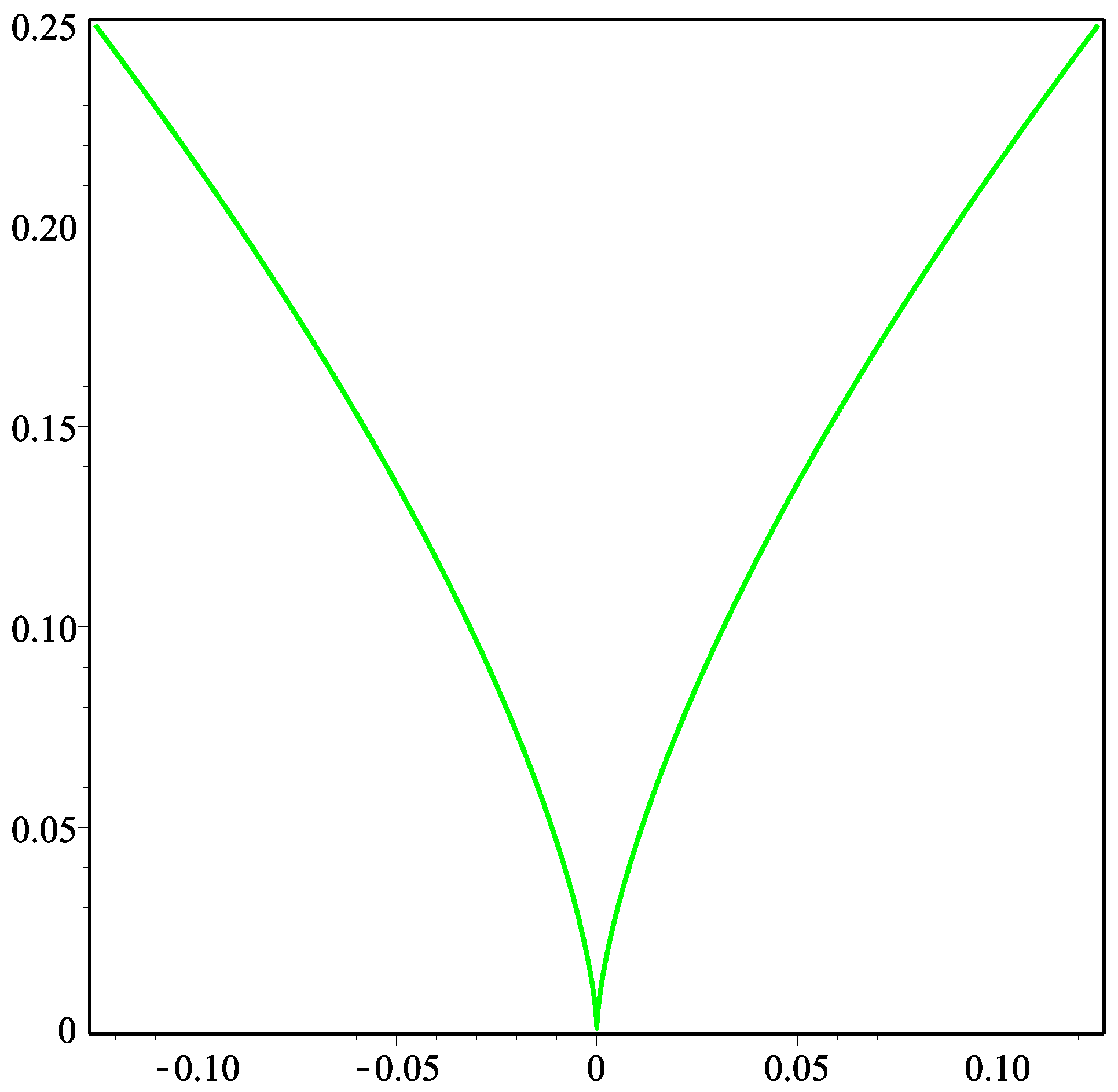
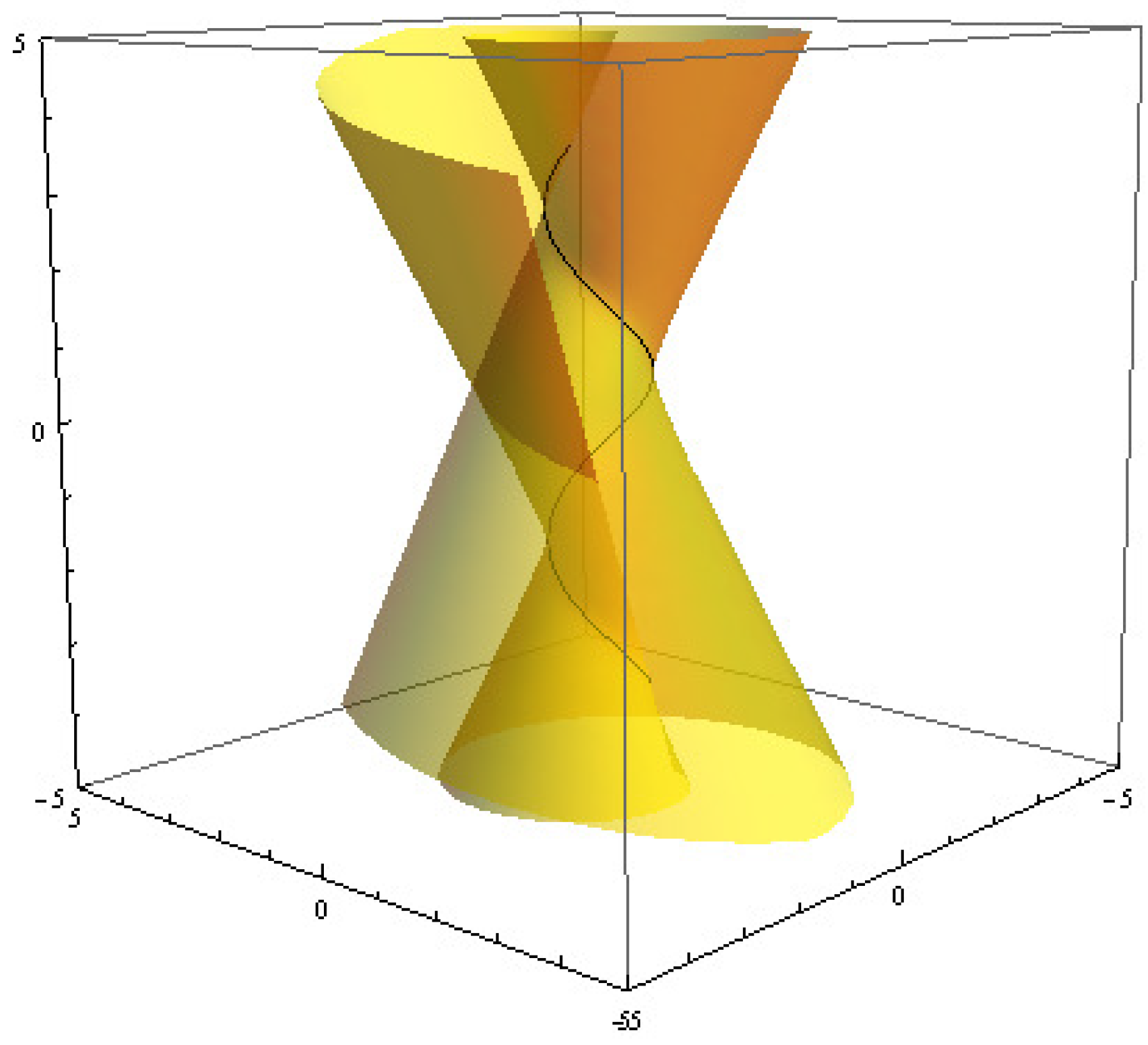
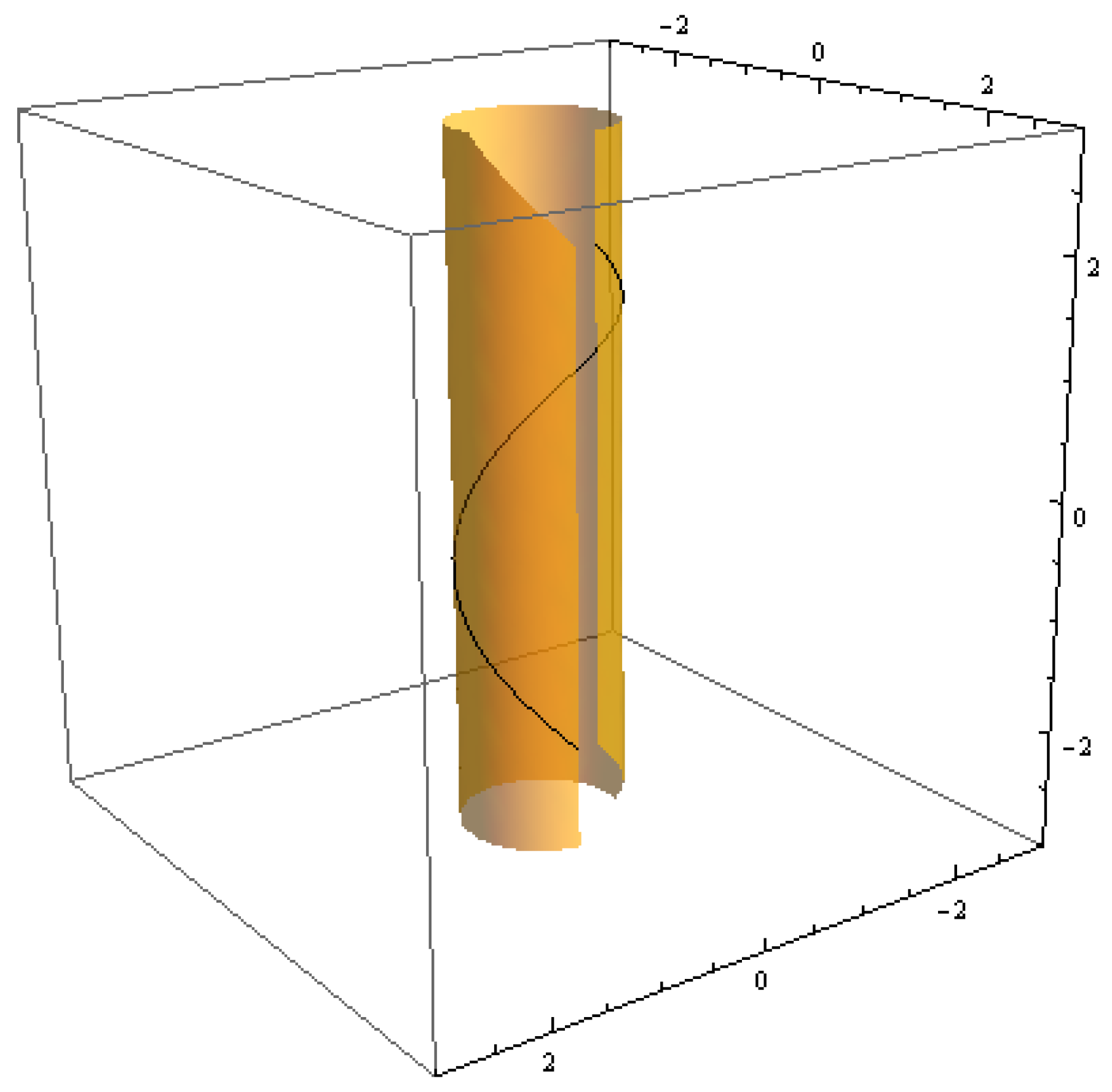
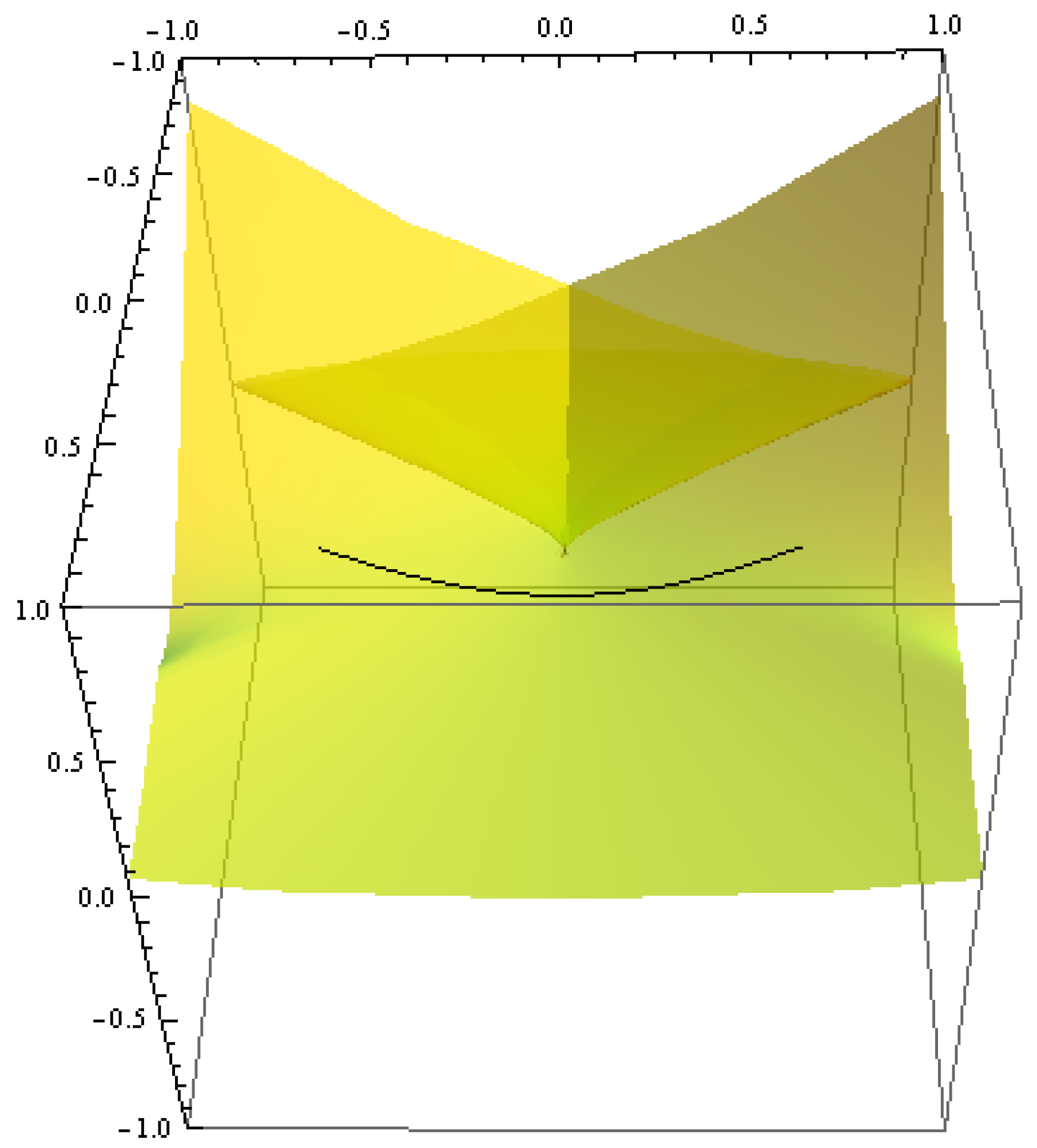
Example 1. Let , where s is the arc-length parameter. ThenWe can calculate that and . Therefore, the one-parameter developable surfaces of is as follows:The tangent developable surface of is as follows:In this case, and . By Theorem 2 (2)-(i), we have the cuspidal edge singularities at (Figure 4). The rectifying developable surface of is as follows:In this case, . By Theorem 1, the rectifying developable surface of is a cylinder (Figure 5). Example 2. Let , where . Then, we haveWe can calculate that and . Therefore, the one-parameter developable surface of is as follows: The tangent developable surface of is as follows:In this case, when . Since , then . By Theorem 2 (2)-(i), we have the cuspidal edge singularities are at if (Figure 6). The rectifying developable surface of is as follows:In this case, we haveandWe can also calculate . By Theorem 2 (3), we have the swallowtail singularities at (Figure 7).
Author Contributions
Conceptualization, Q.Z.; Writing—Original Draft Preparation, Q.Z.; Calculations, D.P.; Manuscript Correction, D.P.; Giving the Examples, Y.W.; Drawing the Pictures, Y.W.
Funding
This research was funded by National Natural Science Foundation of China grant numbers 11271063 and 11671070 and the Fundamental Research Funds for the Central Universities grant number 3132018220.
Acknowledgments
This research was funded by National Natural Science Foundation of China grant numbers 11271063 and 11671070 and the Fundamental Research Funds for the Central Universities grant number 3132018220.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ishikawa, G. Topological classification of the tangent developable of space curves. J. Lond. Math. Soc. 2000, 62, 583–598. [Google Scholar] [CrossRef]
- Izumiya, S.; Katsumi, H.; Yamasaki, T. The Rectifying Developable and the Spherical Darboux Image of a Space Curve. Banach Center Publ. 1999, 50, 137–149. [Google Scholar] [CrossRef]
- Pottmann, H.; Wallner, J. Approximation algorithms for developable surfaces. Comput. Aided Geom. Des. 1999, 16, 539–556. [Google Scholar] [CrossRef]
- Solomon, J.; Vouga, E.; Wardetzky, M.; Grinspun, E. Flexible developable surfaces. Comput. Graph. Forum 2012, 31, 1567–1576. [Google Scholar] [CrossRef]
- Tang, C.; Bo, P.; Wallner, J.; Pottmann, H. Interactive design of developable surfaces. ACM Trans. Graph. 2016, 35, 1–12. [Google Scholar] [CrossRef]
- Cayley, A. On the developable surfaces which arise from two surfaces of second order. Camb. Dublin Math. J. 1850, 2, 46–57. [Google Scholar]
- Sun, J.; Pei, D. Singularity analysis of Lorentzian hypersurfaces on pseudo n-spheres. Math. Methods Appl. Sci. 2015, 38, 2561–2573. [Google Scholar] [CrossRef]
- Sun, J.; Pei, D. Singularity properties of one-parameter lightlike hypersurfaces in Minkowski 4-space. J. Nonlinear Sci. Appl. 2015, 8, 467–477. [Google Scholar] [CrossRef]
- Wang, Y.; Pei, D.; Cui, X. Pseudo-spherical normal Darboux images of curves on a lightlike surface. Math. Methods Appl. Sci. 2017, 40, 7151–7161. [Google Scholar] [CrossRef]
- Wang, Y.; Pei, D.; Gao, R. Singularities for one-parameter null hypersurfaces of Anti-de Sitter spacelike curves in semi-Euclidean Space. J. Funct. Spaces 2016, 2, 1–8. [Google Scholar] [CrossRef]
- Izumiya, S.; Takeuchi, N. Geometry of ruled surfaces. Appl. Math. Gold. Age 2003, 18, 305–338. [Google Scholar]
- Bruce, J.W.; Giblin, P.J. Curves and Singularities; Cambridge Press: Cambridge, UK, 1992. [Google Scholar]
- Arnol’d, V.I.; Gusein-Zade, S.M.; Varchenko, A.N. Singularities of Differentiable Maps; Birkhäuser: New York, NY, USA, 1986; Volume I. [Google Scholar]
- Damon, J. The Unfolding and Determinacy Theorems for Subgroups of A and K; Memoirs American Mathematical Society: Providence, RI, USA, 1984. [Google Scholar]
- Stoker, J.J. Differential Geometry. In Pure and Applied Math; Wiley-Interscience: New York, NY, USA, 1969. [Google Scholar]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






