Stability of Bounded Dynamical Networks with Symmetry

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
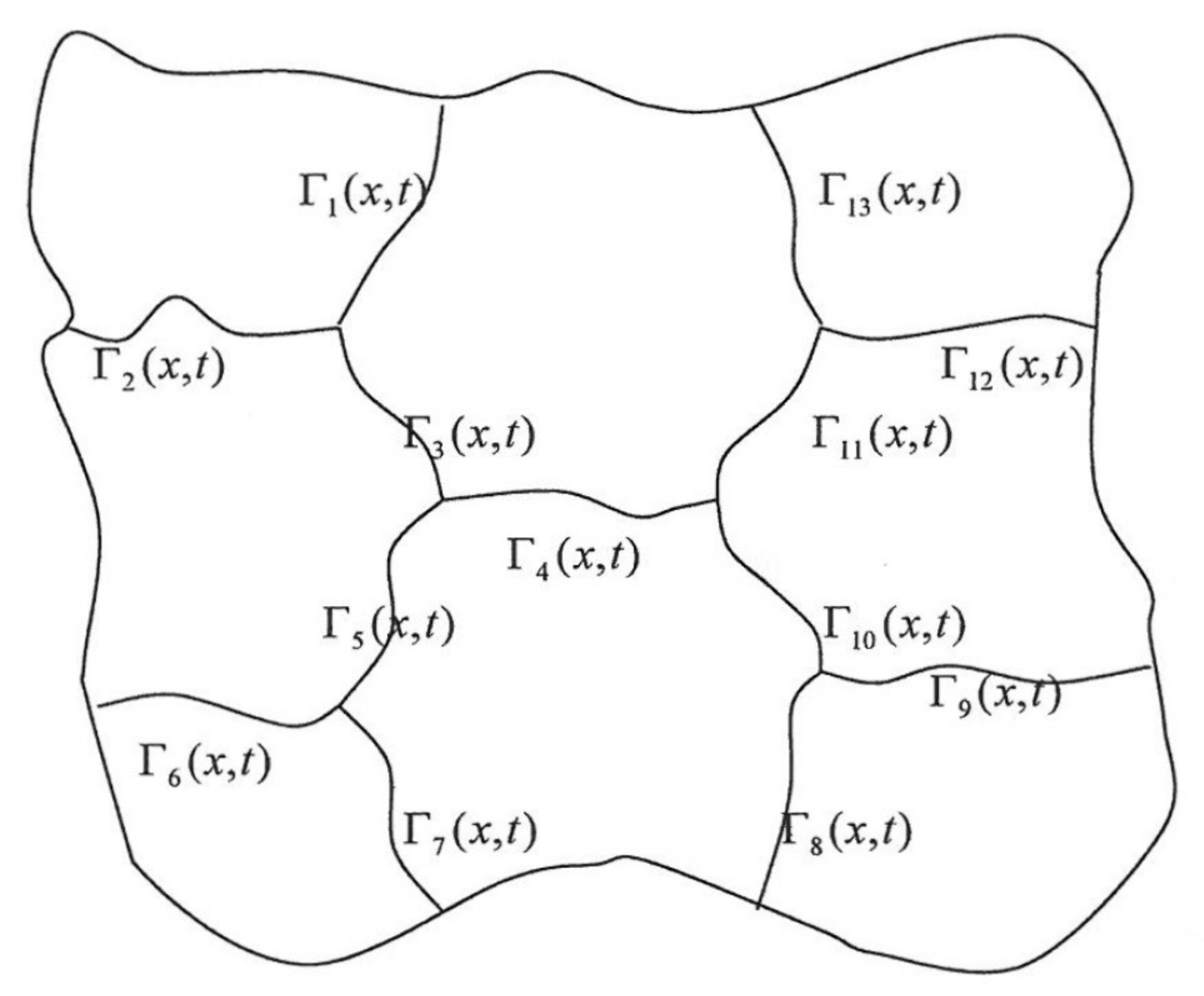
1.1. Problem Formulation
- Incidence conditions: A curve i has two ends at and at .
- (a)
- If at the point , curve i intersects with two other curves, namely curves j and q, at their starting point for example, then:Then, at the other end of curve i, at point , curve i intersects:
- with two other curves, namely curves p and r at their ending points:or,
- at the boundary :where is a real function of two variables that describes locally the boundary .
- (b)
- If at the point , curve i intersects with the boundary instead of two other curves, then:In this case, at the other end of curve i, at point , curve i intersects with two other curves, namely curves p and r, at their ending point:
- Angle conditions:
- (a)
- At the point at which the curves intersect: If curves intersect at their starting points, for example, then:
- (b)
- At :
1.2. Changing the Domain
- Incidence conditions: A curve i has two ends at and at .
- (a)
- If at the point , curve i intersects with two other curves, namely curves j and q, at their starting points for example, then:Then, at the other end of curve i, at point , curve i intersects:
- with two other curves, namely curves p and r, at their ending points for example:or,
- at the boundary :
- (b)
- If at the point , curve i intersects with the boundary instead of two other curves then:In this case, at the other end of curve i, at point , curve i intersects with two other curves, namely curves p and r, at their ending points for example:
- Angle conditions:
- (a)
- At the point at which the curves intersect: If curves intersect at their starting point for example, then:
- (b)
- at :
1.3. Stability
- Incidence conditions: A curve i has two ends at and at .
- (a)
- If at the point , curve i intersects with two other curves, namely curves j and q, at their starting points for example, then:Then, at the other end of curve i, at point curve i intersects:
- with two other curves, namely curve p and r, at their ending points for example:or,
- at the boundary :
- (b)
- If at the point , curve i intersects with the boundary instead of two other curves, then:In this case, at the other end of curve i, at point , curve i intersects with two other curves, namely curves p and r, at their ending points for example:
- Angle conditions:
- (a)
- At the point at which the curves intersect: If curves intersect at their starting points for example, then:
- (b)
- at :
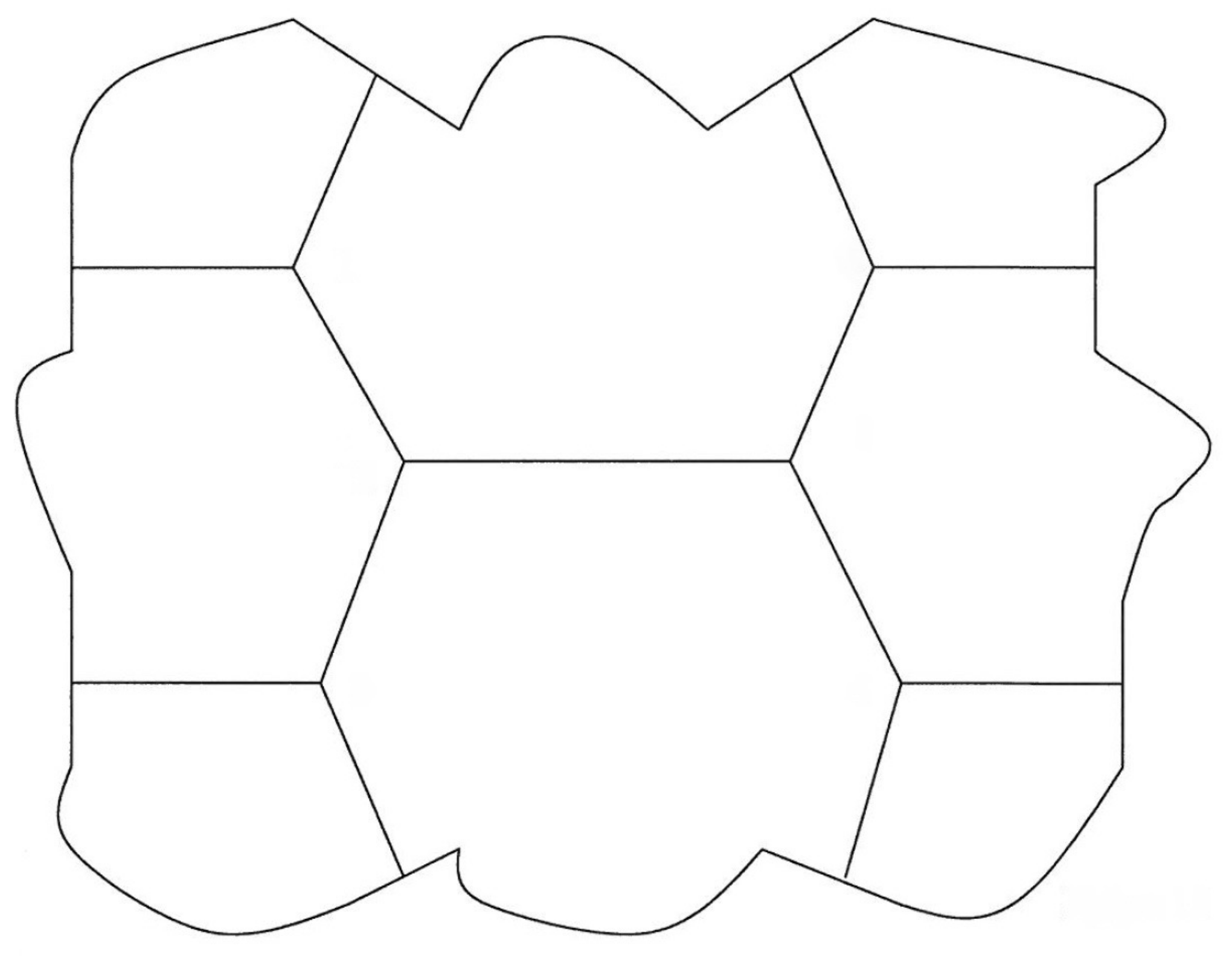
2. A Bounded Network with Two Inner Triple Junctions
- Incidence at the junctions:
- Incidence at the boundary :
- Angle conditions at the junctions:
- Angle conditions at :
- Incidence at the junctions:
- Incidence at the boundary :
- Angle conditions at the junctions:
- Angle conditions at :
- (a)
- If the domain Ω is convex (an ellipse for example) at the points at which the steady state of the network meets the boundary, then the steady state is unstable.
- (b)
- If the domain Ω is non-degenerate concave at the points at which the steady state of the network meets the boundary, then the steady state is stable.
- (c)
- If the domain Ω is flat at the points at which the steady state of the network meets the boundary, then the steady state is neutrally stable.
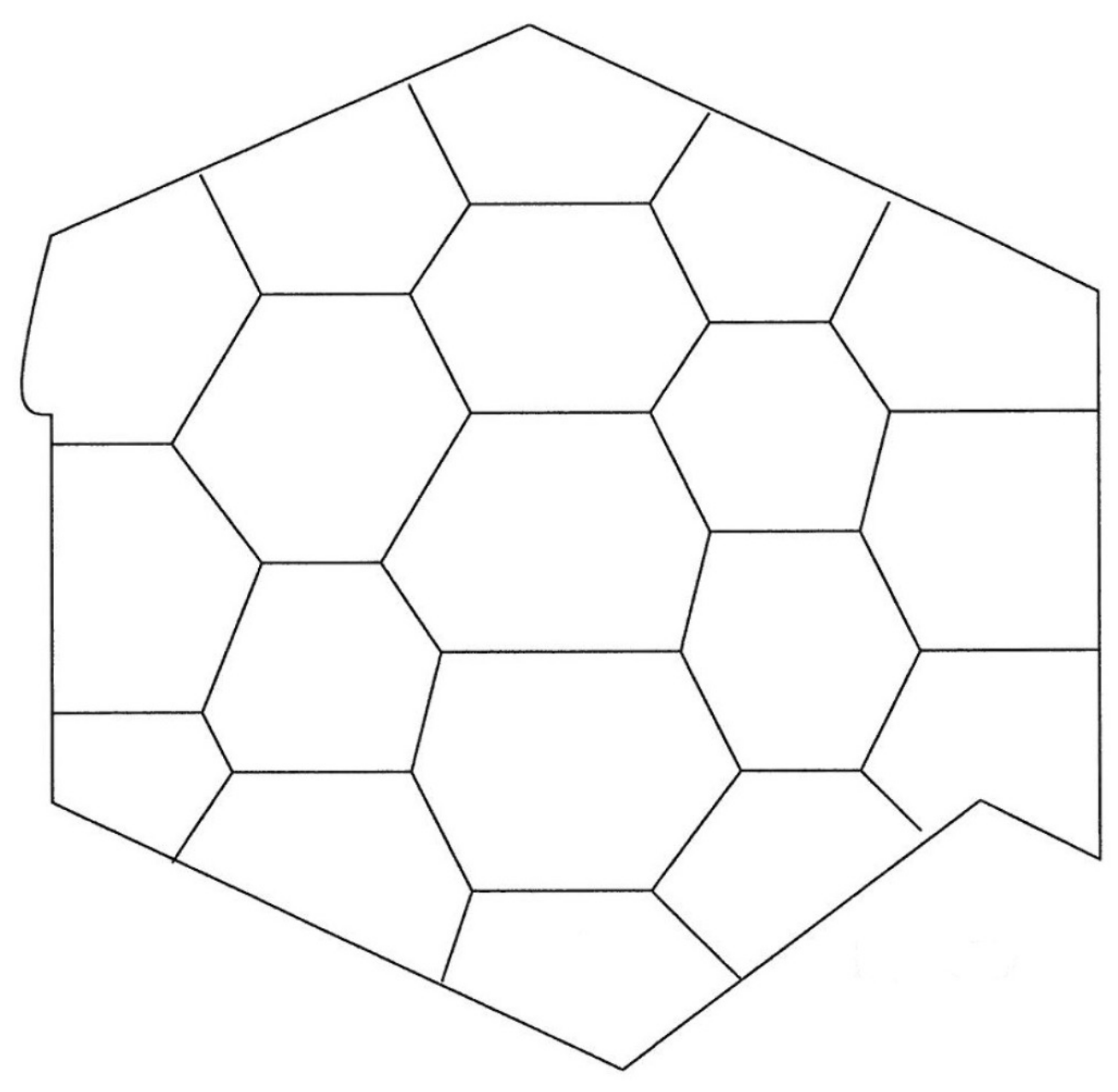
3. Hexagonal Network with an Internal Hexagon
- Incidence at the junctions:
- Incidence at the boundary :
- Angle conditions at the junctions:
- Angle conditions at :
- Incidence at the junctions:
- Incidence at the boundary :
- Angle conditions at the junctions:
- Angle conditions at :
- 1.
- If the domain Ω is convex (an ellipse for example) at the points where the steady state of the network meets the boundary, then the steady state is unstable.
- 2.
- If the domain Ω is non-degenerate concave at the points where the steady state of the network meets the boundary, then the steady state is stable.
- 3.
- If the domain Ω is flat at the points where the steady state of the network meets the boundary, then the steady state is neutrally stable.
4. Conclusions
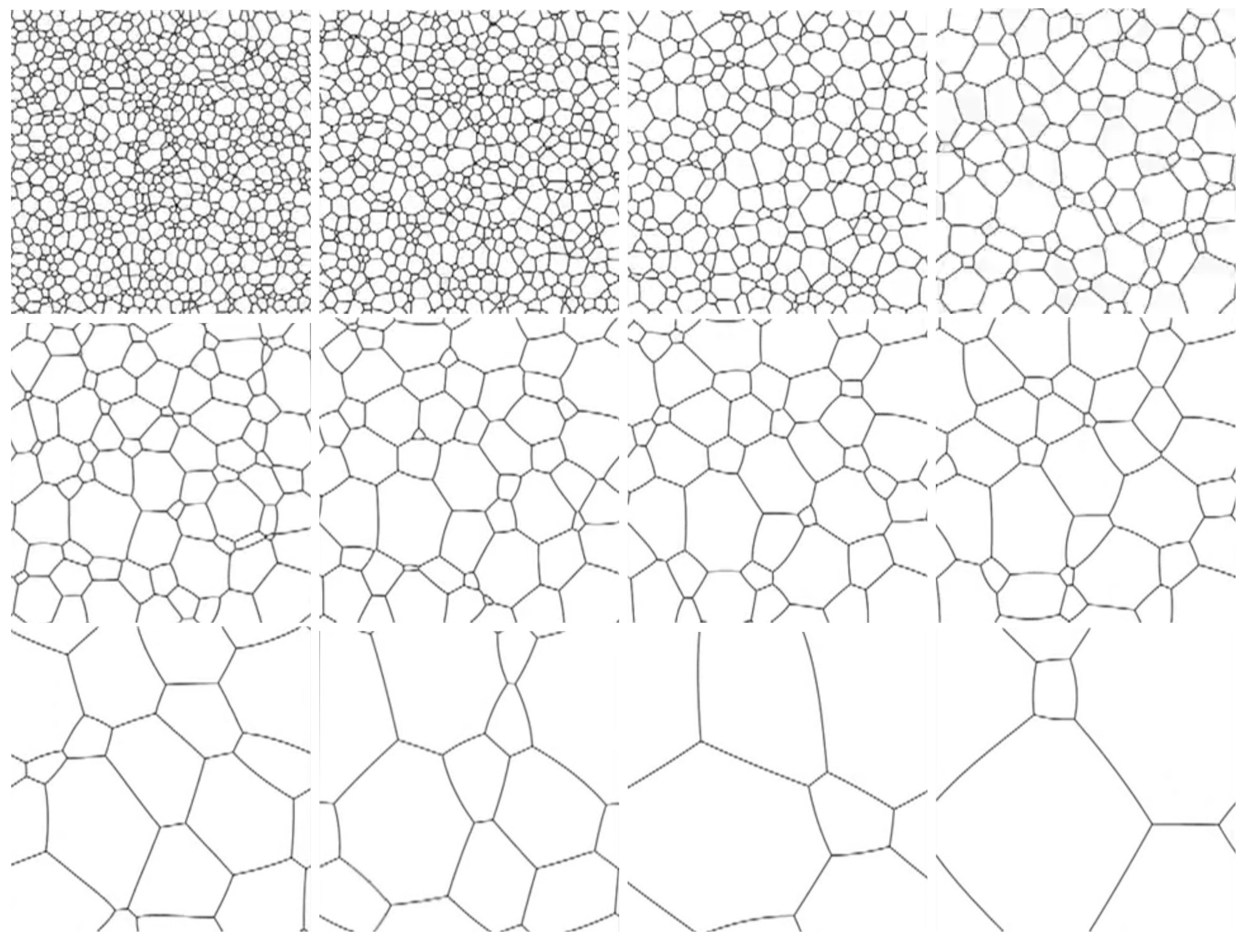
- Grain growth problems: the increase in the size of grains (crystallites) in a material at high temperatures;
- Neural networks that can be applied on the decomposition system (3) for ;
- Continuum modelling of electromechanical dynamics in large-scale power systems;
- Electrical networks of power systems that are not static and change their shape in time. This type of network can include synchronization problems of nonlinear circuits in dynamic electrical networks with general topologies and power system cascading risk assessment based on complex network theory.
Acknowledgments
Conflicts of Interest
References and Note
- Bellettini, G.; Chermisi, M.; Novaga, M. Crystalline curvature flow of planar networks. Interfaces Free Bound. 2006, 8, 481–521. [Google Scholar] [CrossRef]
- Fried, E.; Gurtin, M.E. Gradient nano-scale polycrystalline elasticity: inter grain interactions and triple-junction conditions. J. Mech. Phys. Solids 2009, 57, 1749–1779. [Google Scholar] [CrossRef]
- Gurtin, M.E.; Anand, L. Nano-crystalline grain boundaries that slip and separate: A gradient theory that accounts for grain-boundary stress and conditions at a triple-junction. J. Mech. Phys. Solids 2008, 56, 184–199. [Google Scholar] [CrossRef]
- Corematerials. Growth of a Two-Dimensional Grain Structure. 2009. Available online: https://www.youtube.com/watch?v=J_2FdkRqmCA (accessed on 1 December 2017).
- Graham, H. An Introduction to Hexagonal Geometry. 2010. [Google Scholar]
- Pappas, T. Hexagons in Nature. In The Joy of Mathematics; Wide World Publ./Tetra: San Carlos, CA, USA, 1989; pp. 74–75. [Google Scholar]
- Alama, S.; Bronsard, L.; Gui, C. Stationary layered solutions in R2 for an Allen-Cahn system with multiple well potential. Calc. Var. Partial Differ. Equ. 1997, 5, 359–390. [Google Scholar] [CrossRef]
- Bronsard, L.; Gui, C.; Schatzman, M. A three-layered minimizer in R2 for a variational problem with a symmetric three-well potential. Commun. Pure. Appl. Math. 1996, 49, 677–715. [Google Scholar] [CrossRef]
- Bronsard, L.; Whetton, B. Numerical method for tracking curve networks moving with curvature motion. J. Comput. Phys. 1995, 120, 66–87. [Google Scholar] [CrossRef]
- Bronsard, L.; Reitich, F. On three-phase boundary motion and the singular limit of a vector-valued Ginzburg-Landau equation. Arch. Ration. Mech. 1993, 124, 355–379. [Google Scholar] [CrossRef]
- Freire, A. Mean Curvature Motion of Triple Junctions of Graphs in Two Dimensions. Commun. Partial Differ. Equ. 2010, 35, 302–327. [Google Scholar] [CrossRef][Green Version]
- Ikota, R.; Yanagida, E. Stability of stationary interfaces of binary-tree type. Calc. Var. Partial Differ. Equ. 2004, 22, 375–389. [Google Scholar] [CrossRef]
- Tortorelli, C.; Mantegazza, M.; Novaga, V.M. Motion by Curvature of Planar Networks. arXiv, 2003; arXiv:math/0302164v1. [Google Scholar]
- Xiaofeng, R.; Wei, J. A Double Bubble in a Ternary System with Inhibitory Long Range Interaction. Arch. Ration. Mech. Anal. 2013, 208, 201–253. [Google Scholar]
- Baake, M.; Ghler, F.; Grimm, U. Hexagonal inflation tilings and planar monotiles. Symmetry 2012, 4, 581–602. [Google Scholar] [CrossRef]
- Dassios, I.; Jivkov, A.; Abu-Muharib, A.; James, P. A mathematical model for plasticity and damage: A discrete calculus formulation. J. Comput. Appl. Math. 2017, 312, 27–38. [Google Scholar] [CrossRef]
- Esqueda, H.; Herrera, R.; Botello, S.; Moreles, M.A. A geometric description of Discrete Exterior Calculus for general triangulations. arXiv, 2018; arXiv:1802.01158. [Google Scholar]
- Esqueda, H.; Herrera, R.; Botello, S.; Moreles, M.A. Discrete Exterior Calculus for General Triangulations; ResearchGate: Rome, Italy, 2018. [Google Scholar]
- Garlaschelli, D.; Ruzzenenti, F.; Basosi, R. Complex Networks and Symmetry I: A Review. Symmetry 2010, 2, 1683–1709. [Google Scholar] [CrossRef]
- Hou, L.; Small, M.; Lao, S. Dynamical Systems Induced on Networks Constructed from Time Series. Entropy 2015, 17, 6433–6446. [Google Scholar] [CrossRef]
- Nguyen, T.-T.; Le, D.V.; Yoon, S. Maximization of the Supportable Number of Sensors in QoS-Aware Cluster-Based Underwater Acoustic Sensor Networks. Sensors 2014, 14, 4689–4711. [Google Scholar] [CrossRef] [PubMed]
- Ruzzenenti, F.; Garlaschelli, D.; Basosi, R. Complex Networks and Symmetry II: Reciprocity and Evolution of World Trade. Symmetry 2010, 2, 1710–1744. [Google Scholar] [CrossRef]
- Wang, X.; Jiang, G.-P.; Wu, X. State Estimation for General Complex Dynamical Networks with Incompletely Measured Information. Entropy 2018, 20, 5. [Google Scholar] [CrossRef]
- Boutarfa, B.; Dassios, I. A stability result for a network of two triple junctions on the plane. Math. Methods Appl. Sci. 2015, 40, 6076–6084. [Google Scholar] [CrossRef]
- Dassios, I. Stability of basic steady states of networks in bounded domains. Comput. Math. Appl. 2015, 70, 2177–2196. [Google Scholar] [CrossRef]
- Dassios, I. Stability of triple junctions on the plane. Bull. Greek Math. Soc. 2007, 54, 281–300. [Google Scholar]
- Yanagida, E.; Ikota, R. A stability criterion for stationary curves to the curvature driven-motion with a triple junction. Differ. Integral Equ. 2003, 16, 707–726. [Google Scholar]






© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dassios, I.K. Stability of Bounded Dynamical Networks with Symmetry. Symmetry 2018, 10, 121. https://doi.org/10.3390/sym10040121
Dassios IK. Stability of Bounded Dynamical Networks with Symmetry. Symmetry. 2018; 10(4):121. https://doi.org/10.3390/sym10040121
Chicago/Turabian StyleDassios, Ioannis K. 2018. "Stability of Bounded Dynamical Networks with Symmetry" Symmetry 10, no. 4: 121. https://doi.org/10.3390/sym10040121
APA StyleDassios, I. K. (2018). Stability of Bounded Dynamical Networks with Symmetry. Symmetry, 10(4), 121. https://doi.org/10.3390/sym10040121