1. Introduction
We are interested in the profile of solutions for a system of differential equations. To investigate the profile, our first step is to analyze the eigenvalue of the corresponding linearized system. If the coefficient matrices of our system have a good property, it might be easy to analyze the eigenvalue problem. However, there are a lot of physical models which do not have enough properties to analyze the corresponding eigenvalue problem. (We will study several problems in
Section 3 and
Section 4). Under this situation, we focus on a general linear system with weak dissipation and try to construct the useful condition which induces the notable property of eigenvalues in this article.
Precisely, we consider a general linear system
Here,
over
,
is an unknown vector function, and
,
,
and
L are
constant matrices for
and
. Here and hereafter, we use notations that
where
is a unit vector in
, which means
. Then, throughout this paper, we assume the following condition for the coefficient matrices of (
1).
Condition (A): is real symmetric and positive definite, are real symmetric, while and L are not necessarily real symmetric but and are non-negative definite with the non-trivial kernel for each .
Namely, Condition (A) means that the constant matrices satisfy the followings.
for each
. Here and in the sequel, the superscript
T stands for the transposition, and
and
denote the symmetric and skew-symmetric part of the matrix
X, respectively. That is
and
. Furthermore,
real matrix
X is called positive definite (resp. non-negative definite) on
if
(resp.
) for any
, where
denotes the standard real inner product in
. Here, we remark that “
is positive definite (resp. non-negative definite) on
” is equivalent to
(resp.
) for any
, and
(resp.
) for any
, where
denotes the standard complex inner product in
. Furthermore,
I and
O denote an identity matrix and a zero matrix, respectively.
To analyze the dissipative structure of (
1), we study the corresponding eigenvalue problem
for
and
, and look for the eigenvalue
and the corresponding eigenvector
.
Remark 1. Under Condition (A)
, the eigenvalues of (
2)
satisfy for and . In fact, using (
2)
and the symmetric property of and , we havefor each and . Therefore, by the positivity of and non-negativity of and , we obtain the desired property. We define the strict and uniform dissipativity for the system (
1).
Definition 1. (Strict and uniform dissipativity ([
1])) (i)
The system (
1)
is called strictly dissipative if the real part of all the eigenvalues of (
2)
is negative for each and . (ii)
The system (
1)
is called uniformly dissipative of the type if all the eigenvalues of (
2)
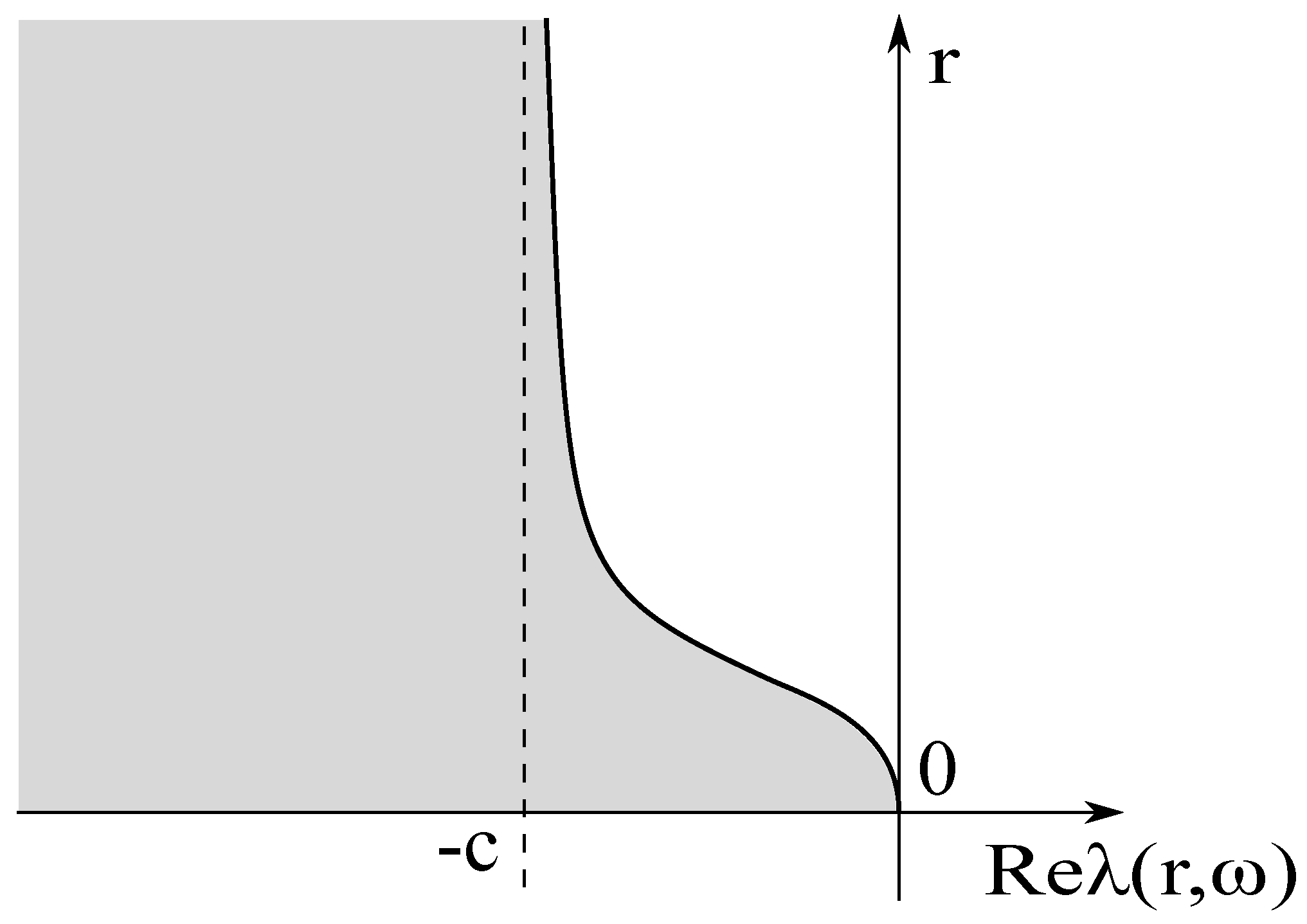
satisfyfor each and , where c is a certain positive constant and is a pair of non-negative integers. Remark 2. The uniform dissipativity of the type with or is called the standard type or the regularity-loss type, respectively.
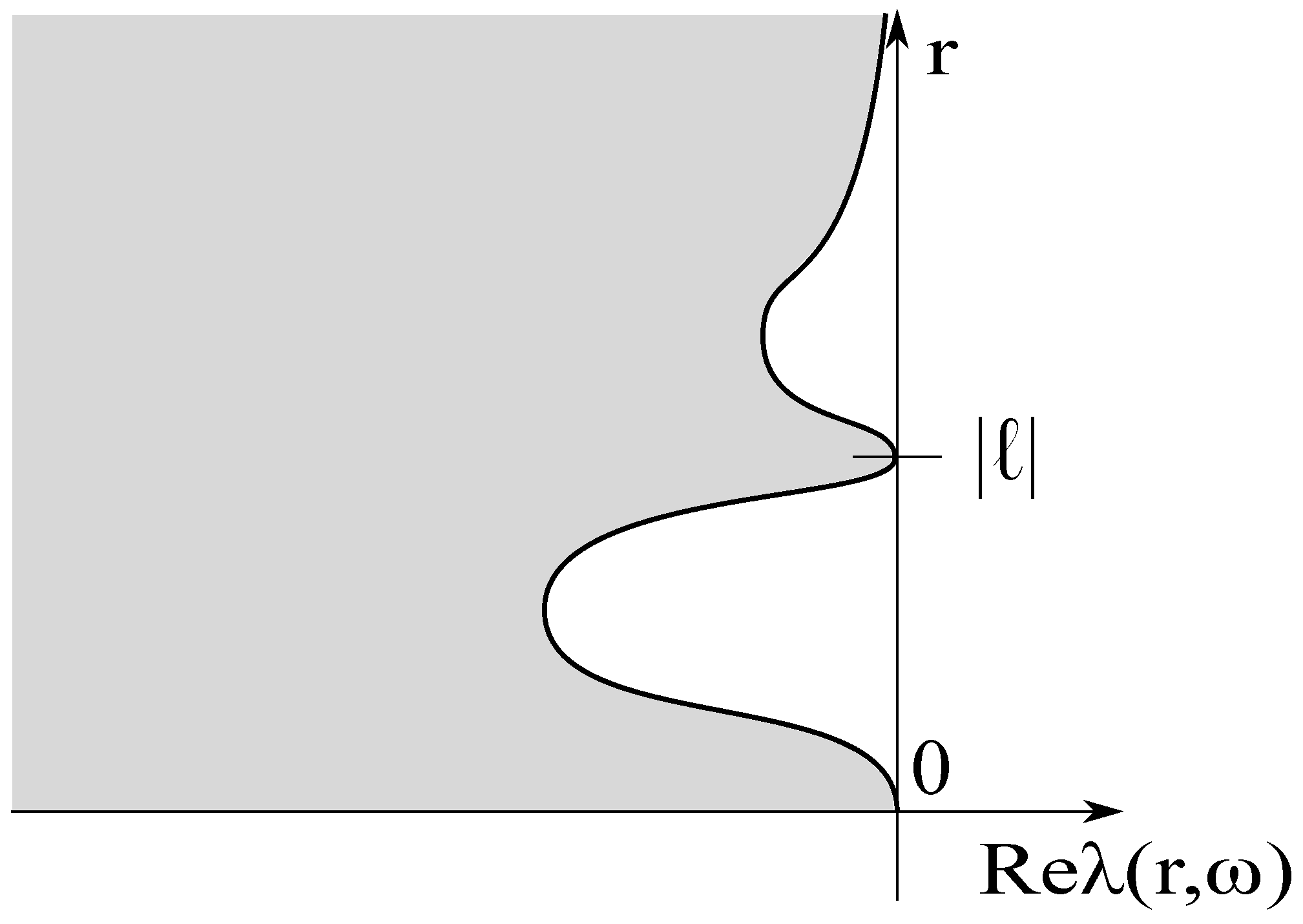
Remark that the vertical axis and the horizontal axis denote
r and
for (
2), respectively, in
Figure 1,
Figure 2 and
Figure 3 appeared in
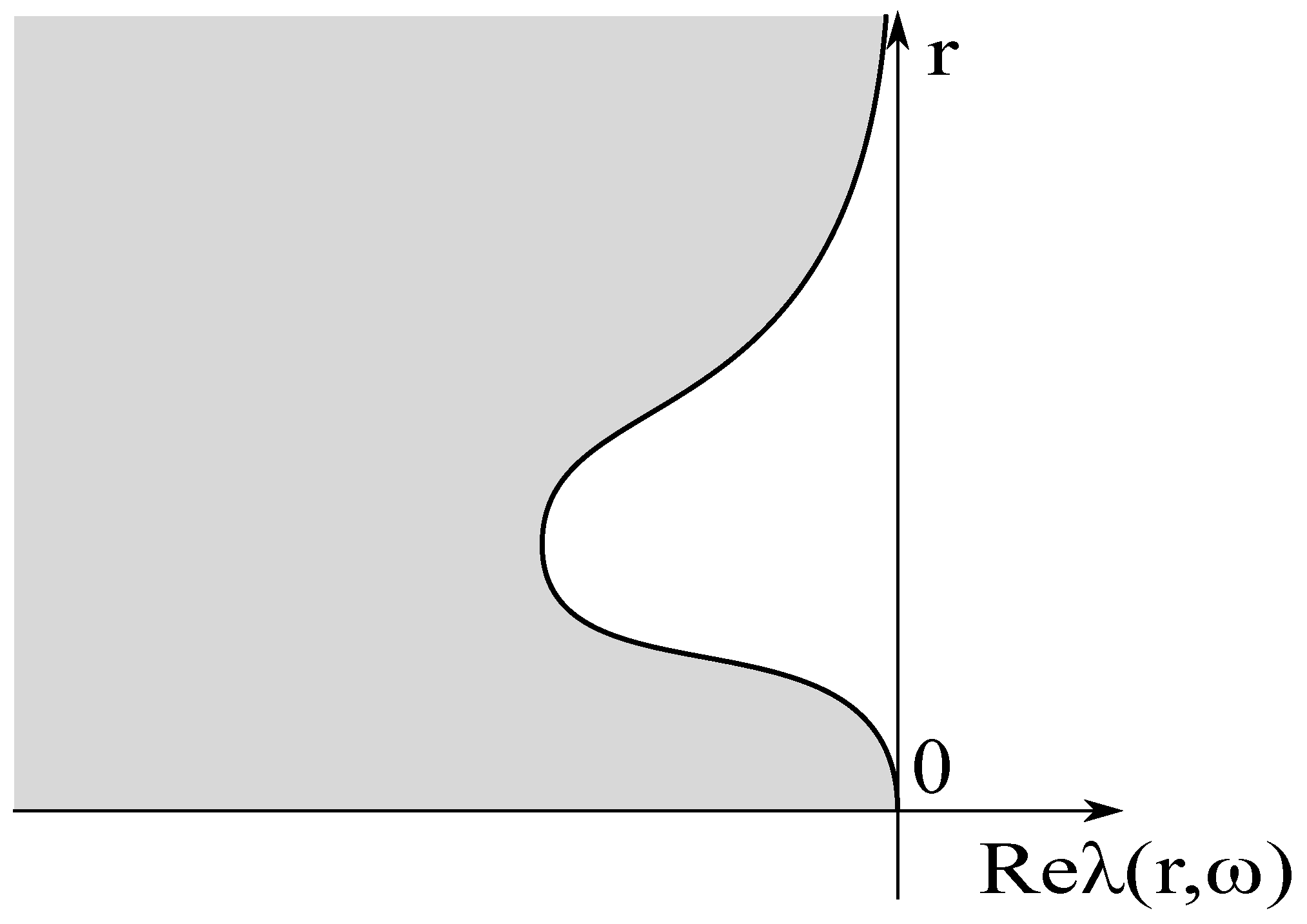
Section 4. Under the strict dissipativity for the system (
1), the real parts of the eigenvalues for (
2) are located in the gray region in
Figure 1 or
Figure 2.
Under the symmetric property for
and
L, Umeda et al. [
2] and Shizuta and Kawashima [
3] introduced the useful stability condition called Kawashima-Shizuta condition or Classical Stability Condition in this article. Precisely, they introduced the following conditions.
Classical Stability Condition (CSC): Suppose that and hold for each . Then .
Condition (K): There is a real compensating matrix
with the following properties:
,
and
for each
.
On the other hand, Kalman et al. [
4], Coron [
5] and Beauchard and Zuazua [
6] discussed the different condition called Kalman Rank Condition for the system (
1), that is as follows.
Classical Kalman Rank Condition (CR): For each
, the
Kalman matrix has rank
m, that is
Under this situation, the following theorem is obtained.
Theorem 1. ([
2,
3,
6])
Suppose that the system (
1)
satisfies Condition (A)
withfor each . Then, for the system (
1)
, the following conditions are equivalent.- (i)
System (
1)
is strictly dissipative. - (ii)
System (
1)
is uniformly dissipative of the type . - (iii)
Condition (K) holds.
- (iv)
Classical Stability Condition (CSC) holds.
Furthermore, if is zero matrix, the above four conditions are equivalent to the following.
- (v)
Classical Kalman Rank Condition (CR) holds.
Remark 3. Beauchard and Zuazua [6] considered the system (
1)
with for , and assumed that L satisfies We note that the assumption (
5)
is the sufficient condition for and . Thus, we regard the assumption (
5)
as the essentially symmetric property. We will discuss in detail in Lemma 1. Emphasize that the physical examples in Section 4 do not satisfy (
4) (
and (
5))
. We remark that the typical feature of the type
is that the high-frequency part decays exponentially while the low-frequency part decays polynomially with the rate of the heat kernel (see
Figure 1). A lot of physical models satisfy these conditions and can be treated by applying Theorem 1. For example, the model system of the compressible fluid gas and the discrete Boltzmann equation is studied by Kawashima [
7] and Shizuta and Kawashima [
3], respectively.
In recent 10 years, some complicated physical models which possess the weak dissipative structure called the regularity-loss structure was studied. For example, the dissipative Timoshenko system was discussed in [
8,
9,
10], the Euler-Maxwell system was studied in [
11,
12], and the hybrid problem of plate equations is in [
13,
14,
15,
16]. We would like to emphasize that these physical models do not satisfy (
4) but Condition (A). Namely, we can no longer apply Theorem 1 to these models. Under this situation, Ueda et al. [
1] introduced the new condition called Condition (S) for the system (
1) with
as follows.
Condition (S): There is a real compensating matrix
S with the following properties:
and
for each
.
Then they derived the sufficient condition which is a combination of Condition (K) and (S) to get the uniformly dissipativity of the type
, which is the regularity-loss type. We remark that the dissipative structure of the regularity-loss type is weaker than the one of the standard type. Precisely,
may tend to zero as
(see
Figure 2). This structure requires more regularity for the initial data when we derive the decay estimate of solutions. This is the reason why this structure is called the regularity-loss type. Indeed, the dissipative Timoshenko system, the Euler-Maxwell system and the thermoelastic plate equation with Cattaneo’s law has the weak dissipative structure of type
. For the detail, we refer the reader to [
8,
9,
11,
12,
16].
However, the stability condition constructed in [
1] is not enough to understand the regularity-loss structure. In fact, some physical models which possess the regularity-loss structure do not satisfy the stability condition in [
1] (e.g., [
16,
17,
18]). Moreover, we can construct artificial models which have the several kinds of the regularity-loss structure (in detail, see [
19]). Furthermore, in recent, Ueda et al. in [
20] succeeded to extend Condition (K) and (S), and analyzed the more complicated dissipative structure.
This situation tells us that it is difficult to characterize the dissipative structure for the regularity-loss type. In fact, there is no related result. Under this situation, we try to extend Classical Stability Condition (CSC) and Classical Kalman Rank Condition (CR), and derive the sufficient and necessary conditions to get the strict dissipativity for (
1) in
Section 2. Furthermore, we will extend our main theorem to apply to a system under constraint conditions in
Section 3. In
Section 4, we introduce several physical models and apply our main theorems to them. Finally, we focus on the Bresse system as an interesting application of our main theorems in
Section 5.
2. New Stability Criterion
We introduce the new stability condition for (
1) in this section. The following conditions are important to characterize the dissipative structure for (
1).
Stability Condition (SC): Suppose that
hold for each
. Then
.
Kalman Rank Condition (R): For each
, the
Kalman matrix has rank
m, that is
Here and hereafter, we use notations that
and
for
. Under Stability Condition (SC) and Kalman Rank Condition (R), we can derive the following relation.
Theorem 2. Suppose that the system (
1)
satisfies Condition (A)
. Then, for the system (
1)
, the following conditions are equivalent. - (i)
System (
1)
is strictly dissipative. - (ii)
Stability Condition (SC) holds.
- (iii)
Kalman Rank Condition (R) holds.
Remark 4. (i)
If the matrices and L satisfy (
4)
, then Condition (SC)
is equivalent to the Condition (CSC)
. Indeed, (
4)
and the second property of (
6)
give us for each . (ii)
It is easy to check that the system (
1)
under Condition (A)
satisfies Condition (CSC)
if the system is strictly dissipative. Namely, Condition (SC)
is sufficient condition for Condition (CSC)
. To prove Theorem 2, we shall reduce our system. We introduce the new function
. Then (
1) is rewritten as
where we define
,
and
. Similarly as before, we use notations that
Remark that the matrices of (
7) satisfy Condition (A) if the matrices of (
1) satisfy Condition (A). In this situation, the eigenvalue problem (
2) is equivalent to
with
.
For the problem (
8), we consider the contraposition for Theorem 2. More precisely, we introduce the complement condition of Condition (SC) and
, and prove the contraposition of Theorem 2.
Condition (SC): There exist
such that
Condition (R): There exist
such that
Here is defined by Then our purpose is to prove the following theorem.
Theorem 3. Suppose that the system (
7)
satisfies Condition (A)
. Then, for the system (
7)
, the following conditions are equivalent. - (i)
System (
7)
is not strictly dissipative. - (ii)
Condition (SC) holds.
- (iii)
Condition (R) holds.
Proof. We first prove (i) from (ii). Since Condition (SC)
, we obtain
Therefore,
is an eigenvalue of (
8) with
,
, and
is a corresponding eigenvector. This means that the system (
7) is not strictly dissipative under Condition (SC)
.
Secondly, we lead (ii) from (i). We assume that the system (
1) is not strictly dissipative. Namely, there exists
such that
. Then we obtain from (
3) that
and
, where
is a corresponding eigenvector of
. Thus we employ (
8) and get
Therefore, putting , and , Condition (SC) is obtained.
Next, we prove (iii) from (ii). Since (
9), we have
for
. Hence, we obtain
Therefore, the induction argument gives
Now, using the Cayley-Hamilton theorem, we have
, where
By virtue of
, we derive (
10) with
.
Finally, we prove (ii) from (iii). Equation (
11) is rewritten as
where
since
is Hermitian matrix. If
, we consider the cases
or
, where
is defined in Condition (R)
. When
, we define
. Then (
12) gives
. Furthermore, it is easy to check
. Namely,
and
satisfy (
9). On the other hand, when
, this gives (
9) with
and
. Using the induction argument, we can introduce
which is a divisor of
and define
which satisfies (
9) with
, where
is some eigenvalue of
. Therefore, we complete the proof. □
Now, we study the relations between the conditions for (
1) and the ones for (
7). To this end, we focus on Condition
and introduce the complement condition of Condition
for (
1) as follows.
Condition (R): There exist
such that
Then we show that Condition (R)
is equivalent to Condition (R)
. Indeed, Condition (R)
means
and
for
. This is equivalent to
for
. Therefore, taking
, Condition (R)
is satisfied.
In the rest of this section, we study the relations between the assumption in Theorem 1 and (
5).
Lemma 1. Let X be matrix and . Then,is sufficient condition for Proof. Because of
, it is easy to find
. Next, we assume
. Then there is the regular matrix
P such that
, where all of the components of the last column vector of
is equal to zero. We introduce
, where
. This gives
This fact is a contradiction under (
13). Therefore, we obtain
. Similarly as before, we also get
, and hence
. Consequently, this yields
which implies
. □
3. New Stability Criterion under Constraint Condition
In this section, we consider the system (
1) under the constraint condition
where
,
and
R are
real constant matrices. In fact, a lot of physical models are described as (
1) under (
14). For example, the linearized system of the electro-magneto-fluid dynamics and Euler-Maxwell system are described as (
1) under (
14). For the detail, we refer [
2,
12] to the reader.
Similarly as before, we study the corresponding eigenvalue problem for the system (
1) under the constraint condition (
14). Namely, we look for the eigenvalue and the eigenvector of the eigenvalue problem (
2) under the condition
for
and
, where
Here, we introduce a notation that
for
and
. From this notation, (
15) can be expressed as
. Then, the strict dissipativity and the uniform dissipativity under the constraint condition are defined as follows.
Definition 2. (Strict dissipativity and uniform dissipativity under constraint) (i)
The system (
1)
under the constraint condition (
14)
is called strictly dissipative under constraint if the real parts of the eigenvalues of (
2)
, which eigenvectors are in , are negative for each and . (ii)
The system (
1)
under the constraint condition (
14)
is called uniformly dissipative under constraint of the type if the eigenvalues of (
2)
, which eigenvectors are in , satisfyfor each and , where c is a certain positive constant and is a pair of non-negative integers. Under the constraint condition (
15), we introduce the modified stability condition and modified Kalman rank condition as follows.
Stability Condition under Constraint (SCC): Suppose that (
6) and
hold for each
. Then
.
Kalman Rank Condition under Constraint (RC): For each
, the
Kalman matrix has rank
m, that is
Here, we define . For these conditions, we obtain the following equivalence.
Theorem 4. Suppose that the system (
1)
satisfies Condition (A)
. Then, for the system (
1)
under the constraint condition (
14)
, the following conditions are equivalent. - (i)
System (
1)
under (
14)
is strictly dissipative under constraint. - (ii)
Condition (SCC) holds.
- (iii)
Condition (RC) holds.
The strategy of proof is almost the same as before. Namely, we consider the contraposition for (
7) under (
14) as follows.
Condition (SCC): There exist
such that (
9) and
.
Condition (RC): There exist
such that
Here we defined that and . Then we shall prove the following theorem.
Theorem 5. Suppose that the system (
7)
satisfies Condition (A)
. Then, for the system (
7)
under the constraint condition (
14)
, the following conditions are equivalent. - (i)
System (
7)
under (
14)
is not strictly dissipative under constraint. - (ii)
Condition (SCC) holds.
- (iii)
Condition (RC) holds.
Proof. Firstly, we prove (i) from (ii). Since Condition (SCC)
, we obtain
Therefore,
is an eigenvalue of (
8) with
,
, and
is a corresponding eigenvector. Furthermore, it is easy to find that
. Thus these facts tell us that the system (
7) under the constraint condition (
14) is not strictly dissipative in
under Condition (SCC)
.
Secondly, we prove (ii) from (i). We assume that the problem (
1) under (
14) is not strictly dissipative in
. Namely, there exists
such that
and
, where
is a pair of the eigenvalue and eigenvector of (
8). Then we obtain from (
3) that
and
. Thus we employ (
8) again and get
Moreover, from the fact
, this yields
. Finally, taking
,
and
for the above relations, we conclude that Condition (SCC)
is satisfied.
Thirdly, we prove (iii) from (ii). Since (
9) and
, we have
for
. Hence, we obtain
Therefore, the same argument as in Theorem 3 gives (
17).
Finally, we prove (ii) from (iii). We state the proof from (
12) in Theorem 3. If
, we consider two cases that
or
. When
, we define
. Then (
12) gives
. Furthermore, it is easy to check
. Namely,
and
satisfy (
9) and
. On the other hand, when
, this gives (
9) and
with
and
. Using the induction argument, we can introduce
which is a divisor of
and define
which satisfies (
9) and
with
, where
is some eigenvalue of
. Hence, the proof is finished. □
Remark 5. If , and , then is equivalent to . Thus Condition (SCC) is equivalent to Condition (SC), and Theorem 4 is also equivalent to Theorem 2.
In the rest of this section, we discuss a relation for the constrain condition and the initial data. More precisely, we introduce the following condition.
Condition (C): The matrices
,
and
R satisfy
for each
.
Condition (C) implies the fact that (
14) holds at an arbitrary time
for the solution of (
14) if it holds initially. For the detail, we refer the reader to [
1]. Therefore, it is reasonable for the Cauchy problem to assign the constraint condition (
14) which satisfies Condition (C). If we suppose that Condition (C) for the system (
1) under (
14), we can relax Condition (SCC).
Modified Stability Condition under Constraint (MSCC): Suppose that (
6) hold for each
. Then
. Furthermore, suppose that
and (
16) hold for each
. Then
.
Theorem 6. Under Condition (C), Condition (SCC) is equivalent to Condition (MSCC).
Proof. The sufficient condition is trivial. We only prove the necessary condition. Under Condition (C), this yields
for each
. Thus, by the first equation of (
6), we get
. Namely we arrive at (
16) if
, and complete the proof. □
Remark 6. Theorem 6 tells us that if the system does not satisfy Condition (SC)
for some , then it is difficult to find the useful constraint condition and apply Condition (SCC)
. On the other hand, if the system satisfies Condition (SC)
for , it might be possible to find the useful constraint condition and apply Condition (SCC)(
or (MSCC))
to the system. We will explain the situation by using concrete examples in Section 4.3, Section 4.4, Section 5.2 and Section 5.3. 

{kind=link}
{kind=link}
{kind=link}


