Fault Diagnosis of Mine Shaft Guide Rails Using Vibration Signal Analysis Based on Dynamic Time Warping

Abstract
1. Introduction
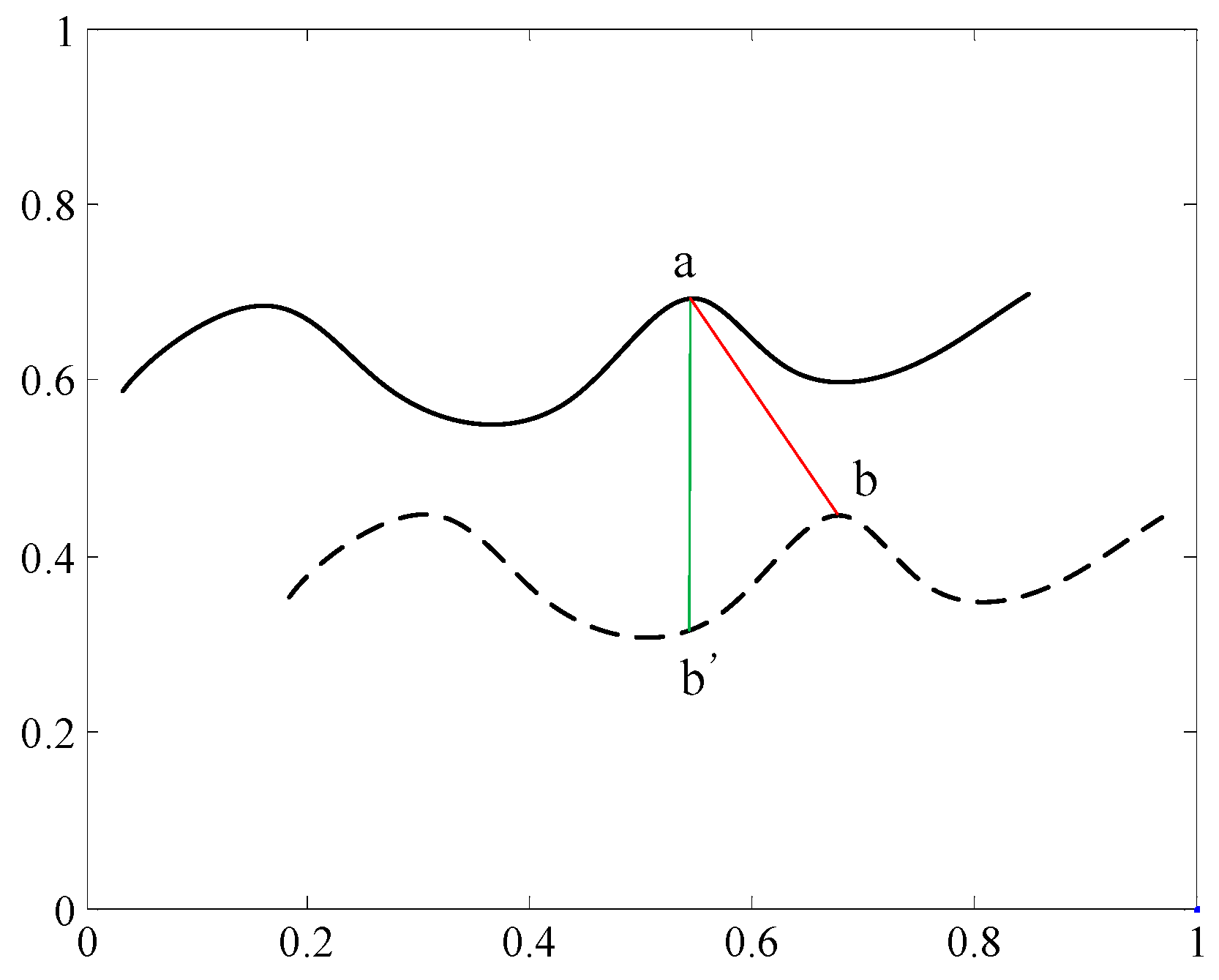
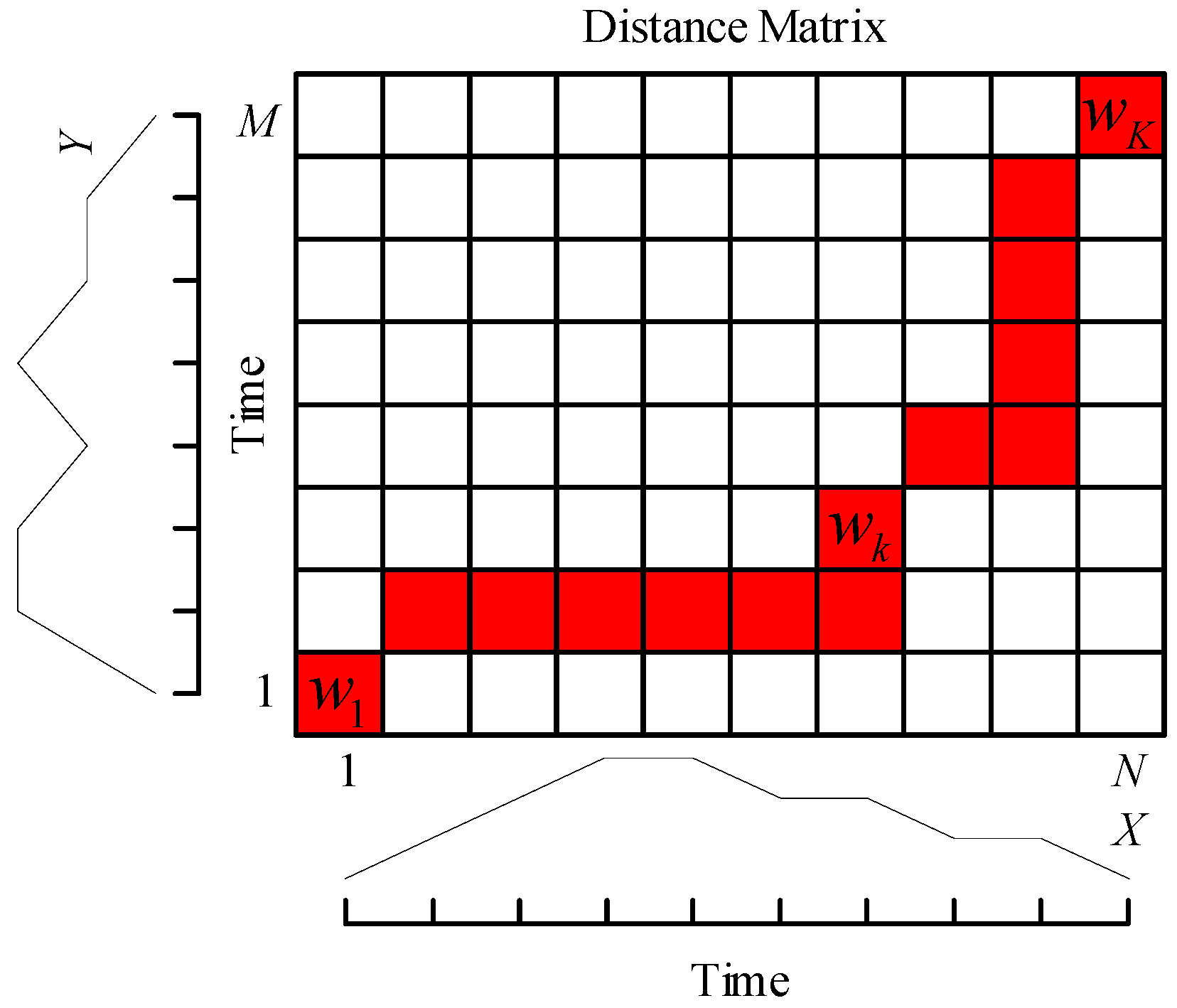
2. Dynamic Time Warping
- Boundary condition: and . The warping path must start at the beginning and finish at the end of each time series.
- Monotonicity condition: if and , then and .
- Continuity condition: if and , then and .
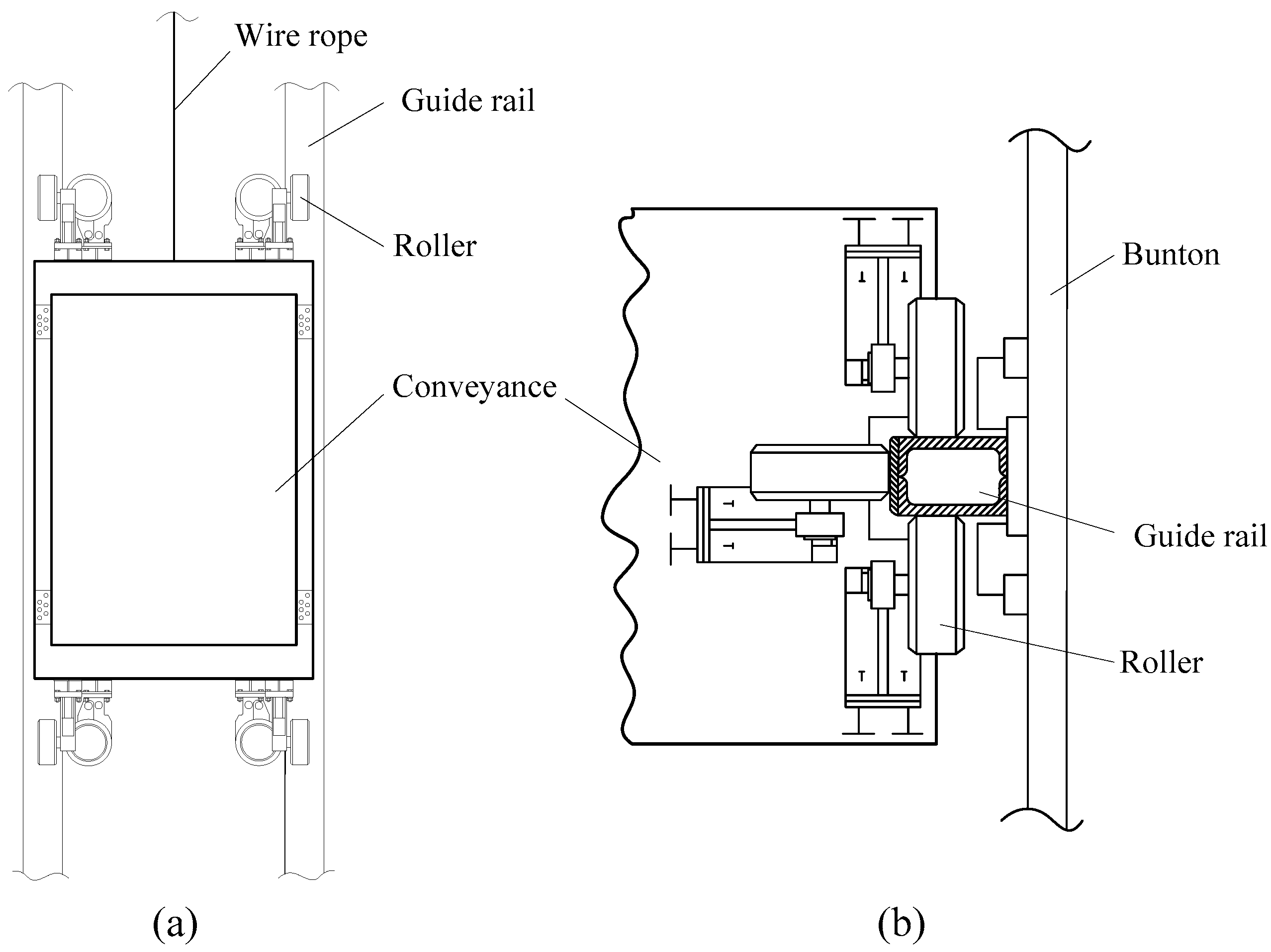
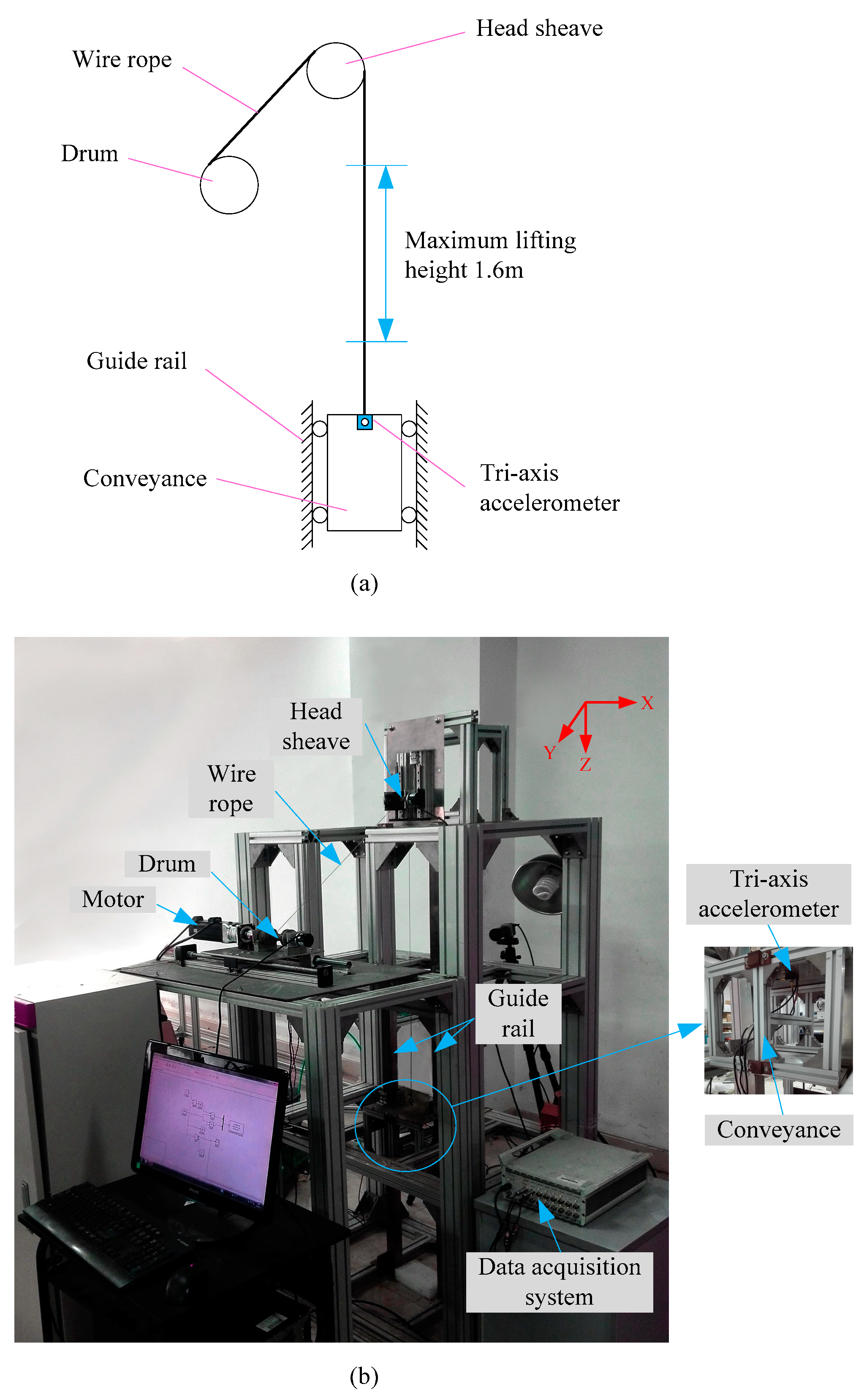
3. Experimental Setup
4. Results and Discussions
4.1. CW Selection
4.1.1. Normal Condition
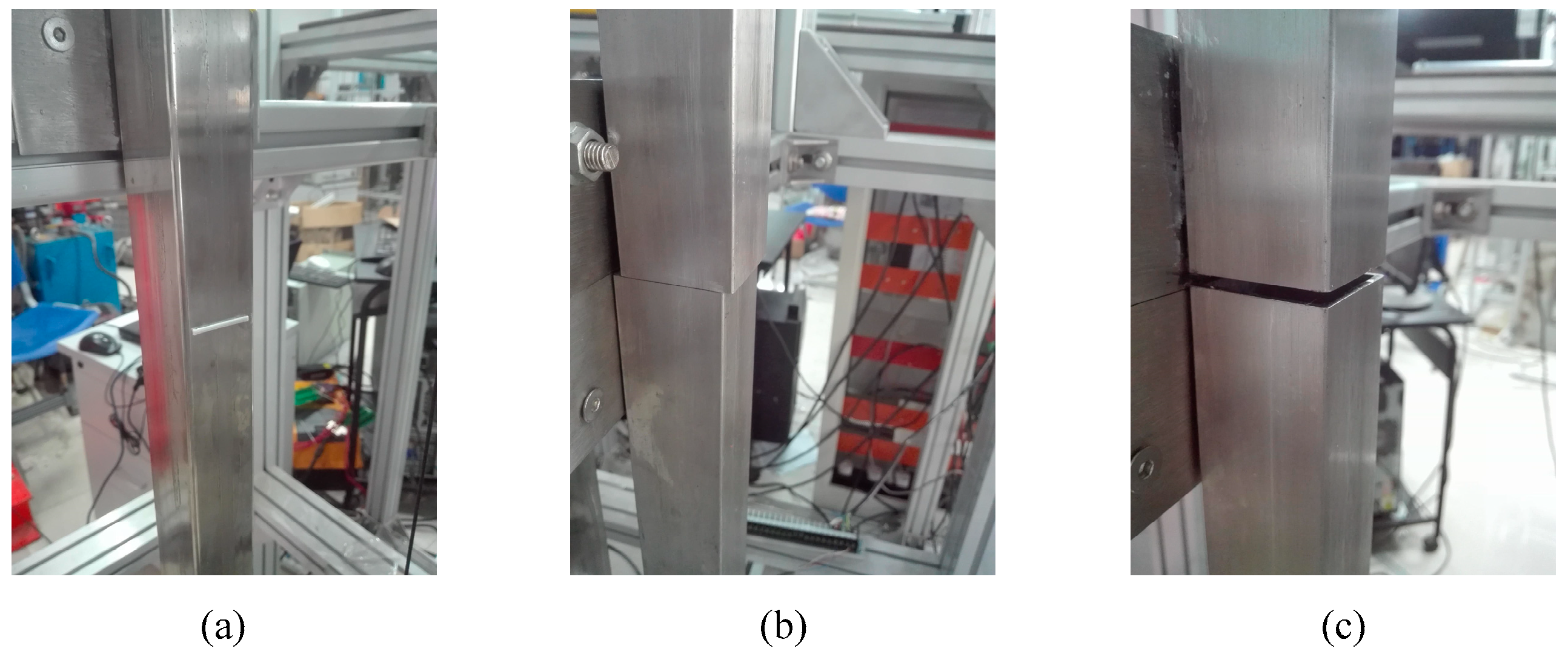
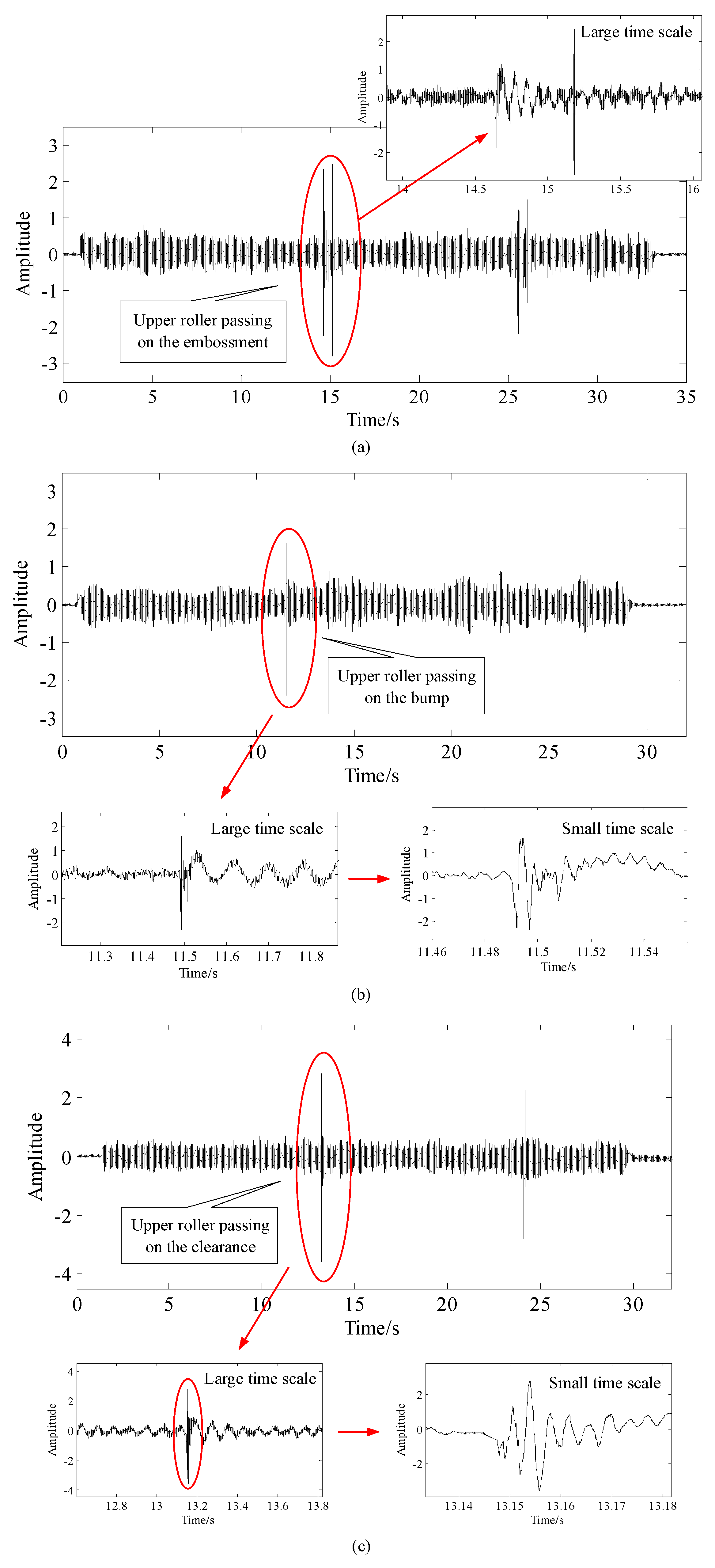
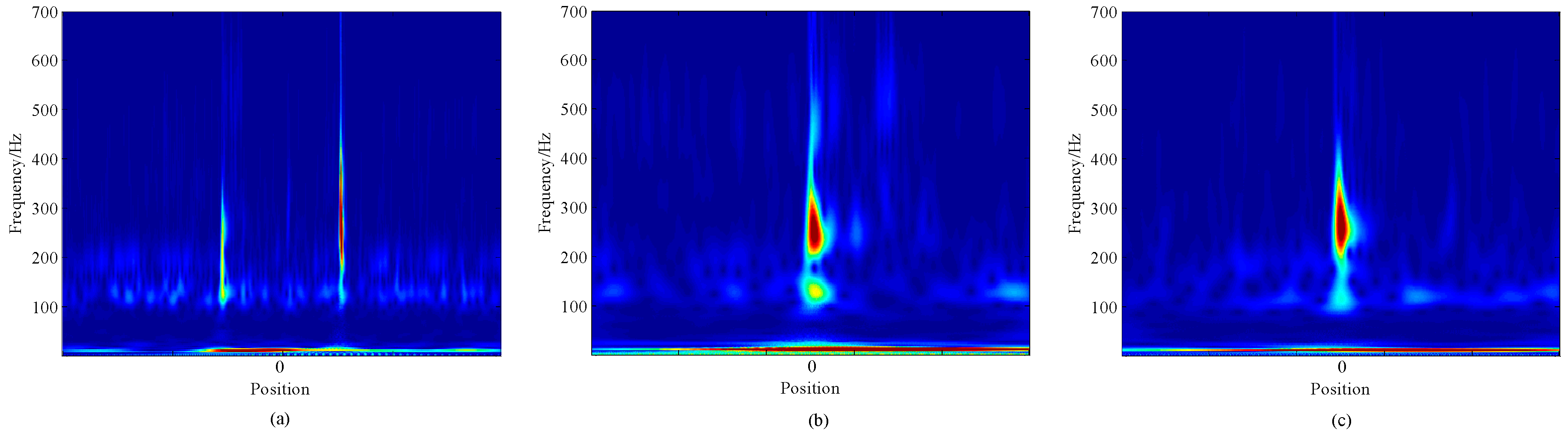
4.1.2. Fault Conditions
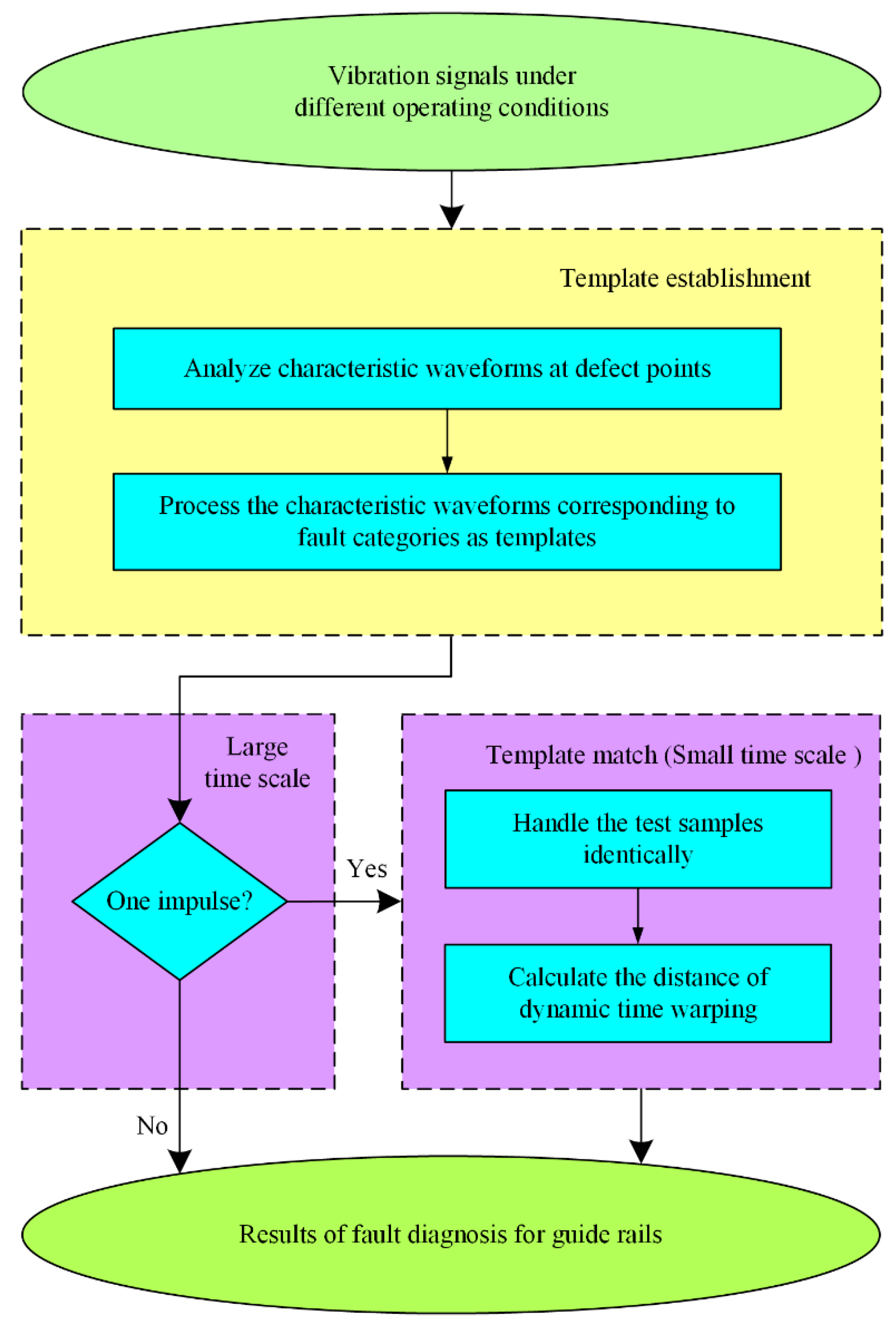
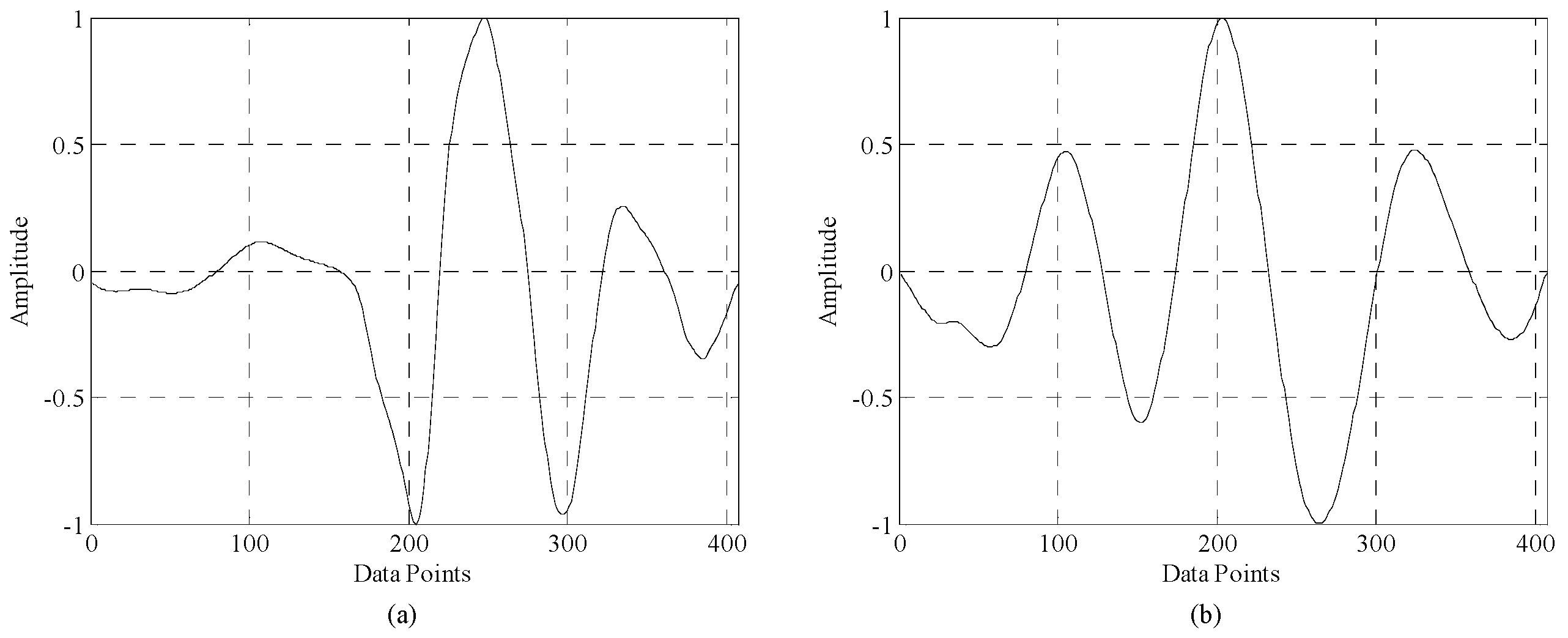
4.2. Template Establishment
- Set the reference line L = 0.
- Pick the point of maximum amplitude O from the pattern of the smoothed CW.
- Define Spot A when the smoothed CW crosses L the fourth time from Point O on the left as the start point of the template.
- Define Spot B when the smoothed CW crosses L the fourth time from Point O on the right as the end point of the template.
4.3. Fault Diagnosis Based on the Proposed Method
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Khan, M.M.; Krige, G.J. Evaluation of the structural integrity of aging mine shafts. Eng. Struct. 2002, 24, 901–907. [Google Scholar] [CrossRef]
- Krige, G.J.; Kemp, A.R. The behaviour and design of mineshaft steelwork and conveyances: A summary of a current research programme. J. S. Afr. Mech. Eng. 1982, 32, 163–169. [Google Scholar]
- Zhu, Y.J. Research on Vertical Hoist Steelwork Guide Status Monitoring and Health Diagnosis. Master’s Thesis, China University of Mining and Technology, Xuzhou, China, 2014. [Google Scholar]
- Krige, G.J. Some initial findings on the behaviour and design of mine-shaft steelwork and conveyances. J. S. Afr. Inst. Min. Metall. 1986, 86, 205–215. [Google Scholar]
- Jiang, Y.Q. Research on Nonlinear Coupling Characteristics and Condition Assessment of Vertical Steel Guide System. Ph.D. Thesis, China University of Mining and Technology, Xuzhou, China, 2011. [Google Scholar]
- Li, Z.F. Study on Vibration Characteristics and Typical Faults Diagnosis of Hoisting System. Ph.D. Thesis, China University of Mining and Technology, Xuzhou, China, 2008. [Google Scholar]
- Jiang, Y.Q.; Xiao, X.M.; Li, Z.F. Research on time-frequency analysis of steel guide dynamic test signals based on Laplace wavelet. In Proceedings of the 2010 3rd International Congress on Image and Signal Processing, Yantai, China, 16–18 October 2010. [Google Scholar]
- Ma, C.; Wang, T.B.; Xiao, X.M.; Jiang, Y.Q. Pattern recognition of rigid hoisting guides based on vibration characteristics. J. Vibroeng. 2017, 19, 237–245. [Google Scholar] [CrossRef]
- Lederman, G.; Chen, S.H.; Garrett, J.H.; Kovacevic, J.; Noh, H.Y.; Bielak, J. Track monitoring from the dynamic response of a passing train: A sparse approach. Mech. Syst. Signal Proc. 2017, 90, 141–153. [Google Scholar] [CrossRef]
- Wei, X.K.; Liu, F.; Jia, L.M. Urban rail track condition monitoring based on in-service vehicle acceleration measurements. Measurement 2016, 80, 217–228. [Google Scholar] [CrossRef]
- Liang, B.; Iwnicki, S.; Ball, A.; Young, A.E. Adaptive noise cancelling and time-frequency techniques for rail surface defect detection. Mech. Syst. Signal Proc. 2015, 54–55, 41–51. [Google Scholar] [CrossRef]
- Caprioli, A.; Cigada, A.; Raveglia, D. Rail inspection in track maintenance: A benchmark between the wavelet approach and the more conventional Fourier analysis. Mech. Syst. Signal Proc. 2007, 21, 631–652. [Google Scholar] [CrossRef]
- Molodova, M.; Li, Z.L.; Nunez, A.; Dollevoet, R. Automatic detection of squats in railway infrastructure. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1980–1990. [Google Scholar] [CrossRef]
- Salvador, P.; Naranjo, V.; Insa, R.; Teixeira, P. Axlebox accelerations: Their acquisition and time-frequency characterisation for railway track monitoring purposes. Measurement 2016, 82, 301–312. [Google Scholar] [CrossRef]
- Sakoe, H.; Chiba, S. Dynamic programming algorithm optimization for spoken word recognition. IEEE Trans. Acoust. Speech Sign. Process. 1978, 26, 43–49. [Google Scholar] [CrossRef]
- Zhen, D.; Wang, T.; Gu, F.; Ball, A.D. Fault diagnosis of motor drives using stator current signal analysis based on dynamic time warping. Mech. Syst. Signal Proc. 2013, 34, 191–202. [Google Scholar] [CrossRef]
- Sobie, C.; Freitas, C.; Nicolai, M. Simulation-driven machine learning: Bearing fault classification. Mech. Syst. Signal Proc. 2018, 99, 403–419. [Google Scholar] [CrossRef]
- Huang, S.Z.; Zhang, F.; Yu, R.J.; Chen, W.; Hu, F.; Dong, D.C. Turnout fault diagnosis through dynamic time warping and signal normalization. J. Adv. Transp. 2017. [Google Scholar] [CrossRef]
- Han, T.; Liu, X.L.; Tan, A.C.C. Fault diagnosis of rolling element bearings based on Multiscale Dynamic Time Warping. Measurement 2017, 95, 355–366. [Google Scholar] [CrossRef]
- Hong, L.; Dhupia, J.S. A time domain approach to diagnose gearbox fault based on measured vibration signals. J. Sound Vib. 2014, 333, 2164–2180. [Google Scholar] [CrossRef]
- Khalid, M.I.; Alotaiby, T.N.; Aldosari, S.A.; Alshebeili, S.A.; Alhameed, M.H.; Poghosyan, V. Epileptic MEG spikes detection using amplitude thresholding and dynamic time warping. IEEE Access 2017, 5, 11658–11667. [Google Scholar] [CrossRef]
- Li, Z.L.; Molodova, M.; Nunez, A.; Dollevoet, R. Improvements in axle box acceleration measurements for the detection of light squats in railway infrastructure. IEEE Trans. Ind. Electron. 2015, 62, 4385–4397. [Google Scholar] [CrossRef]
- Mandal, N.K.; Dhanasekar, M.; Sun, Y.Q. Impact forces at dipped rail joints. Proc. Inst. Mech. Eng. Part F-J. Rail Rapid Transit 2016, 230, 271–282. [Google Scholar] [CrossRef]
- Chen, A.Y.; Kurfess, T.R. A new model for rolling element bearing defect size estimation. Measurement 2018, 114, 144–149. [Google Scholar] [CrossRef]
- Sawalhi, N.; Randall, R.B. Vibration response of spalled rolling element bearings: Observations, simulations and signal processing techniques to track the spall size. Mech. Syst. Signal Proc. 2011, 25, 846–870. [Google Scholar] [CrossRef]
- Ahmadi, A.M.; Howard, C.Q. A defect size estimation method based on operational speed and path of rolling elements in defective bearings. J. Sound Vibr. 2016, 385, 138–148. [Google Scholar] [CrossRef]
- Ahmadi, A.M.; Howard, C.Q.; Petersen, D. The path of rolling elements in defective bearings: Observations, analysis and methods to estimate spall size. J. Sound Vibr. 2016, 366, 277–292. [Google Scholar] [CrossRef]
- Guo, Y.B.; Zhang, D.K.; Chen, K.; Feng, C.; Ge, S.R. Longitudinal dynamic characteristics of steel wire rope in a friction hoisting system and its coupling effect with friction transmission. Tribol. Int. 2018, 119, 731–743. [Google Scholar] [CrossRef]
- Ma, C.; Xiao, X.M.; Ma, X.P. Identification of dangerous hoisting loads based on vibration characteristics. Proc. Inst. Mech. Eng. Part C-J. Eng. Mech. Eng. Sci. 2017, 231, 4035–4043. [Google Scholar] [CrossRef]
- Niu, G.; Yang, B.S. Intelligent condition monitoring and prognostics system based on data-fusion strategy. Expert Syst. Appl. 2010, 37, 8831–8840. [Google Scholar] [CrossRef]
- Tao, L.F.; Lu, C.; Noktehdan, A. Similarity recognition of online data curves based on dynamic spatial time warping for the estimation of lithium-ion battery capacity. J. Power Sources 2015, 293, 751–759. [Google Scholar] [CrossRef]
- Zhang, M. Research on Pattern Recognition of Vertical Hoist Steelwork Guide Typical Faults. Master’s Thesis, China University of Mining and Technology, Xuzhou, China, 2015. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Manufacturer | Sensitivity (mV/m·s−2) | ||
|---|---|---|---|---|
| X | Y | Z | ||
| DH311E | Donghua Testing | 1.09 | 1.19 | 1.05 |
| Test No. | Label | DB | DC | Classification | Result |
|---|---|---|---|---|---|
| 1 | Clearance | 28.26 | 15.21 | Clearance | Correct |
| 2 | Bump | 15.42 | 38.79 | Bump | Correct |
| 3 | Bump | 37.62 | 66.30 | Bump | Correct |
| 4 | Clearance | 31.99 | 8.02 | Clearance | Correct |
| 5 | Bump | 26.80 | 44.27 | Bump | Correct |
| 6 | Clearance | 21.93 | 13.18 | Clearance | Correct |
| 7 | Clearance | 15.06 | 26.96 | Bump | Incorrect |
| 8 | Bump | 10.95 | 47.30 | Bump | Correct |
| 9 | Clearance | 35.26 | 16.20 | Clearance | Correct |
| 10 | Bump | 24.61 | 50.22 | Bump | Correct |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, B.; Li, W.; Jiang, F. Fault Diagnosis of Mine Shaft Guide Rails Using Vibration Signal Analysis Based on Dynamic Time Warping. Symmetry 2018, 10, 500. https://doi.org/10.3390/sym10100500
Wu B, Li W, Jiang F. Fault Diagnosis of Mine Shaft Guide Rails Using Vibration Signal Analysis Based on Dynamic Time Warping. Symmetry. 2018; 10(10):500. https://doi.org/10.3390/sym10100500
Chicago/Turabian StyleWu, Bo, Wei Li, and Fan Jiang. 2018. "Fault Diagnosis of Mine Shaft Guide Rails Using Vibration Signal Analysis Based on Dynamic Time Warping" Symmetry 10, no. 10: 500. https://doi.org/10.3390/sym10100500
APA StyleWu, B., Li, W., & Jiang, F. (2018). Fault Diagnosis of Mine Shaft Guide Rails Using Vibration Signal Analysis Based on Dynamic Time Warping. Symmetry, 10(10), 500. https://doi.org/10.3390/sym10100500