Localization Free Energy Efficient and Cooperative Routing Protocols for Underwater Wireless Sensor Networks



Abstract
1. Introduction
- LFEER: In the proposed localization free energy efficient routing protocol, the DSN is chosen based on residual energy, number of hops and bit error rate values. The source node chooses only one DSN from the neighbor nodes. That node is chosen as a DSN which has the maximum residual energy, fewest hops and minimum bit error rate. Due to these parameters and mechanism, the energy consumption of the nodes is controlled, which increases the battery lifetime.
- Co-LFEER: The improved version of the proposed LFEER is called localization free energy efficient cooperative routing. Here, one RLN is considered. The DSN and the RLN are chosen on the parameters: residual energy, number of hops and BER. The DSN is chosen among the many existing nodes in the field of the source node. The node which has the maximum residual energy, fewest hops and least BER is chosen as a DSN to transmit the information bags. The RLN selection parameters are the same as for the DSN. The RLN is selected based on second maximum/least values of the same parameters as for the DSN. The fewest hops and minimum BER parameters control the channel effects on the information bags and, as a result, PDR is improved.
- No Localization: The proposed protocols are localization free and do not need the exact location of the nodes which reduces the cost of the network.
2. Related Work
3. Proposed Algorithms Explanation
3.1. Localization Free Energy Efficient Routing Protocol (LFEER)
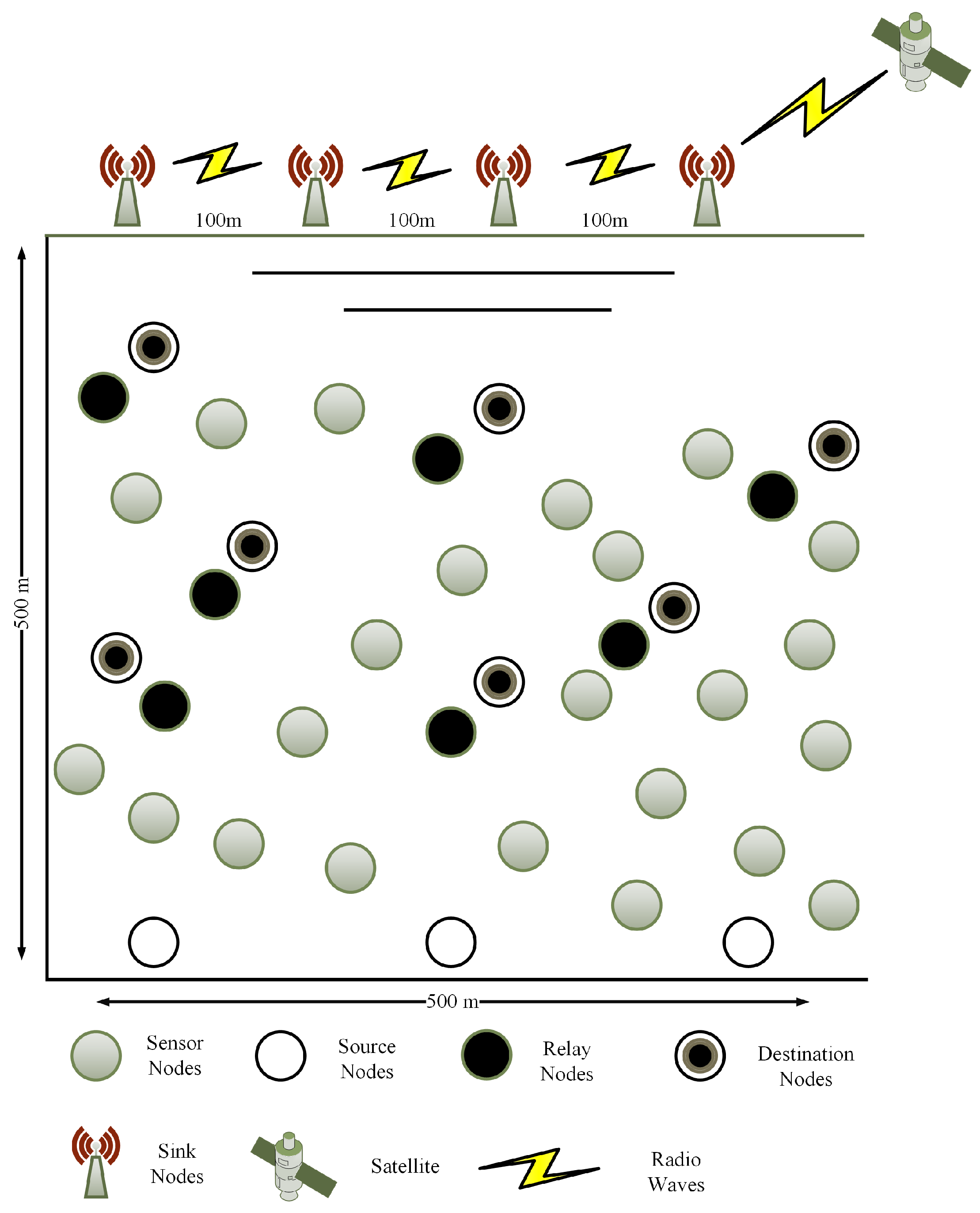
3.1.1. Network Architecture
3.1.2. Information Acquisition
3.1.3. Destination Nodes Selection and Data Forwarding
3.2. Cooperative Localization Free Energy Efficient Routing Protocol (Co-LFEER)
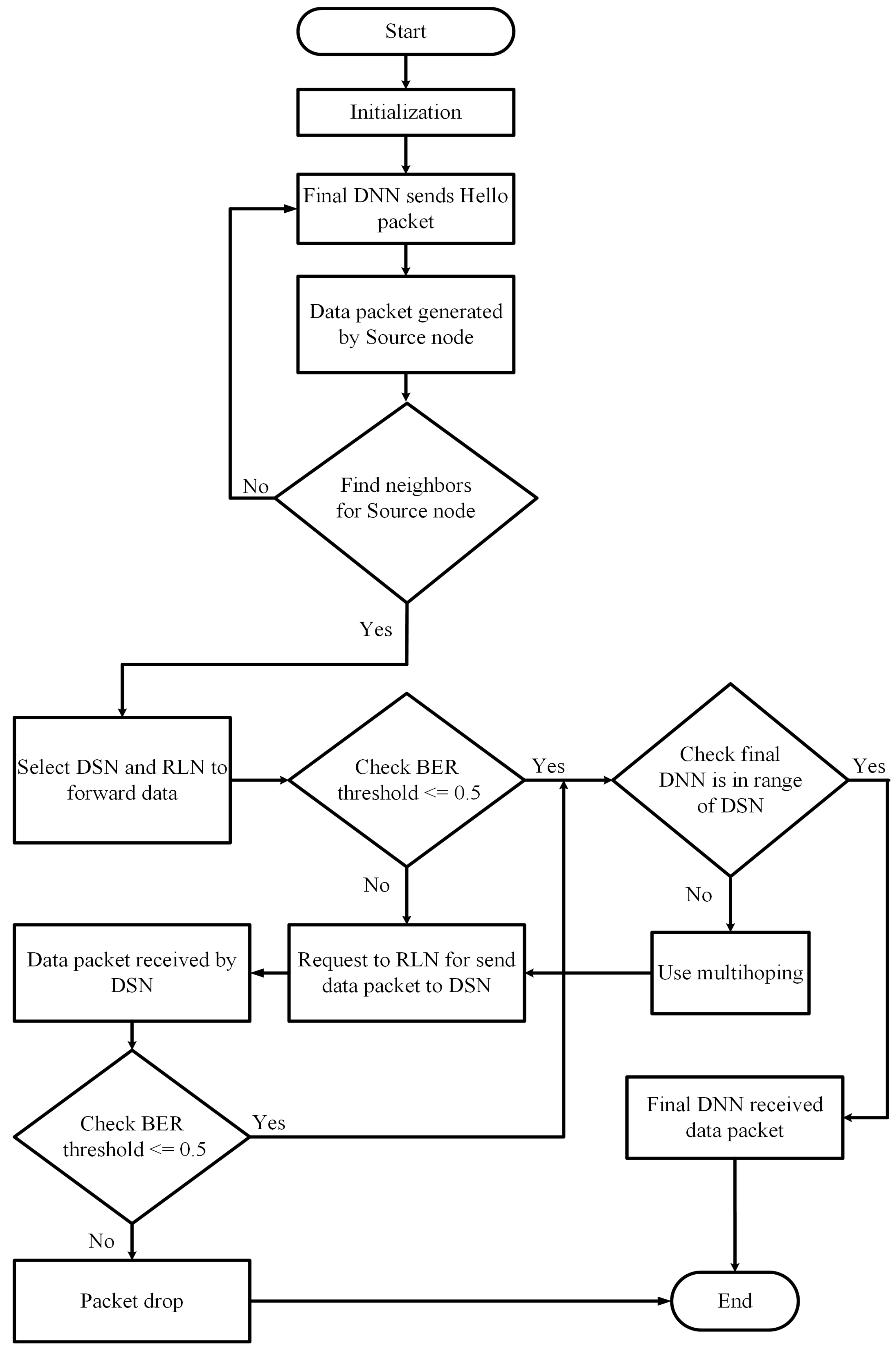
3.2.1. Selection of Destination and Relay Nodes and Data Forwarding
| Algorithm 1: Selection of Nodes and Data Forwarding. |
| 1Z:Number of Nodes 2:Bit Error Rate Threshold 3:Sink Node 4:Destination 5:Relay Node 6:Residual Energy 7n:A Number of Hops 8:Bit Error Rate 9R:Total Number of Rounds 10i:Starting Number 11fori = 1:1:Z do 12 Data Reached= false 13 while (Data Reached) 14 if (Sink is Available) 15 Data Reached= true 16 else if (Sink is not Available) 17 if >0 18 Find the Nearby Nodes 19 Find the Amongst the Nearby Nodes 20 The Found on 21 function (f) = / 22 For the First Highest function (f) value 23 Forward the Data 24 if 25 Data Accepted 26 else 27 Find the for the Second Highest Value of the function (f) 28 Forward the Data 29 break 30 end if 31 end if 32 end if 33 end while 34 end for |
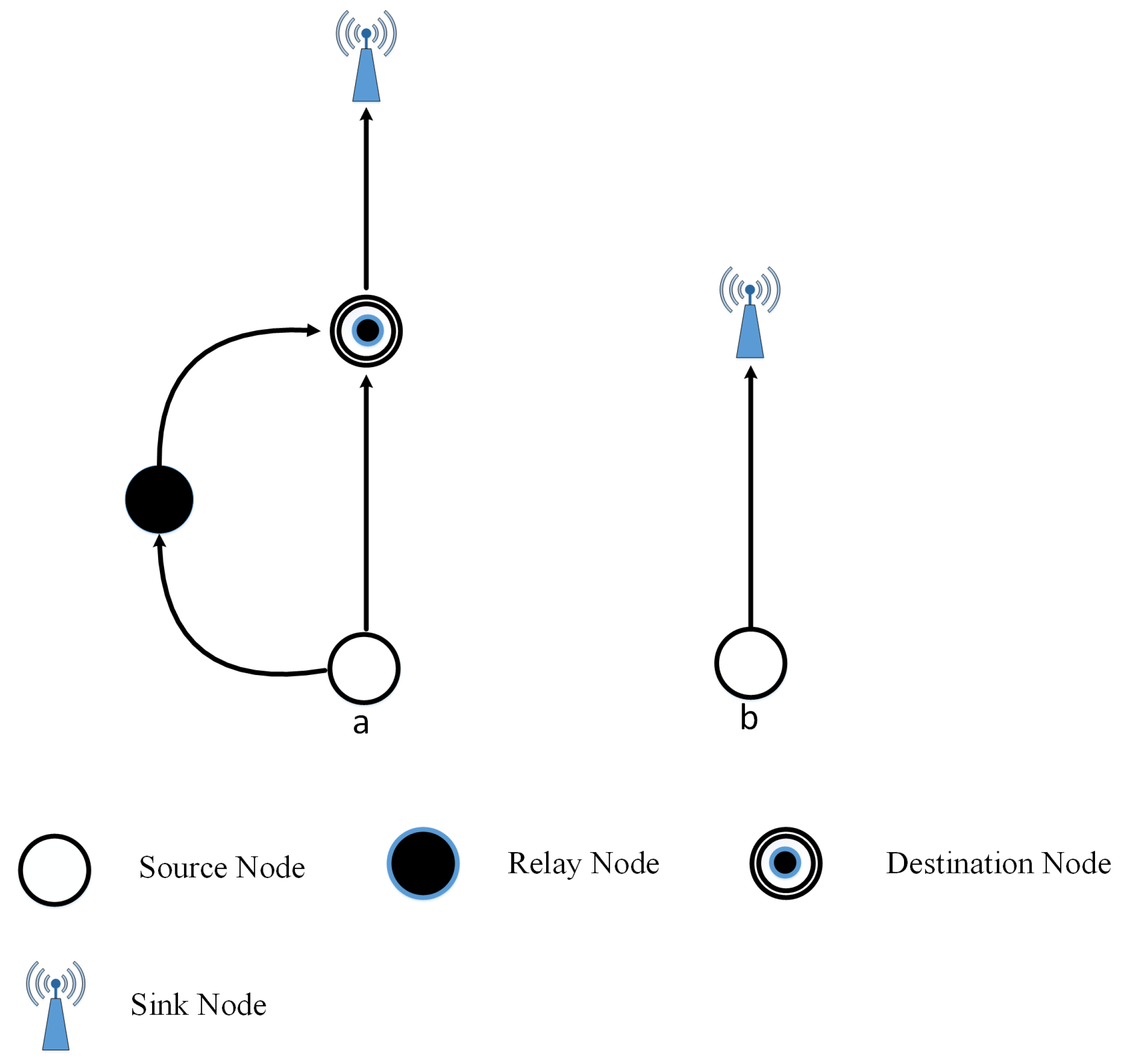
3.2.2. Cooperation of Destination and Single Relay Nodes
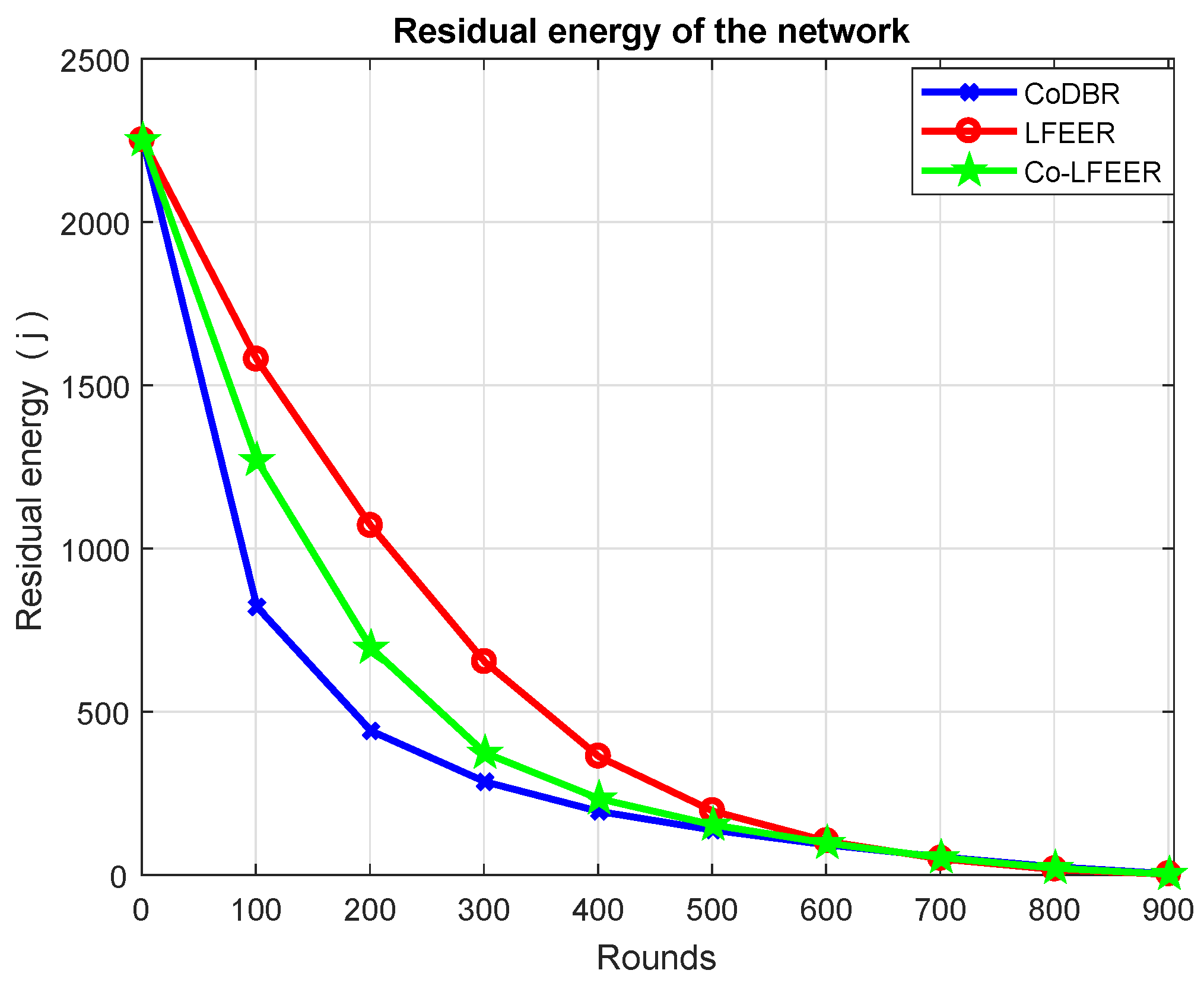
4. Simulation Results
5. Conclusions and Future Task
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| DNN (s) | Destination (s) |
| RLN (s) | Relay node (s) |
| DSN (s) | Destination node (s) |
| PDR | Packet delivery ratio |
| BER | Bit error rate |
| AF | Amplify and forward |
| DF | Decode and forward |
| RSSI | Received signal strength indicator |
| DLL | Data link layer |
| OSI | Open system interconnection |
| MAC | Media access control |
| GPS | Global position system |
| SNR | Signal to noise ratio |
| MRC | Maximal ratio combine |
References
- Khasawneh, A.; Latiff, M.S.B.A.; Kaiwartya, O.; Chizari, H. Next forwarding node selection in underwater wireless sensor networks (UWSNs): Techniques and challenges. Information 2016, 8, 3. [Google Scholar] [CrossRef]
- Wahid, A.; Lee, S.; Kim, D. A reliable and energy efficient routing protocol for underwater wireless sensor networks. Int. J. Commun. Syst. 2014, 27, 2048–2062. [Google Scholar] [CrossRef]
- Zhou, Z.; Yao, B.; Xing, R.; Shu, L.; Bu, S. E-CARP: An energy efficient routing protocol for UWSNs in the internet of underwater things. IEEE Sens. J. 2016, 16, 4072–4082. [Google Scholar] [CrossRef]
- Basagni, S.; Petrioli, C.; Petroccia, R.; Spaccini, D. CARP: A channel-aware routing protocol for underwater acoustic wireless networks. Ad Hoc Netw. 2015, 34, 92–104. [Google Scholar] [CrossRef]
- Khan, A.; Ali, I.; Rahman, A.U.; Imran, M.; Mahmood, H. Co-EEORS: Cooperative Energy Efficient Optimal Relay Selection Protocol for Underwater Wireless Sensor Networks. IEEE Access 2018, 28777–28789. [Google Scholar] [CrossRef]
- Khasawneh, A.; Latiff, M.S.B.A.; Chizari, H.; Tariq, M.; Bamatraf, A. PRESSURE BASED ROUTING PROTOCOL for UNDERWATER WIRELESS SENSOR NETWORKS: A SURVEY. KSII. Trans. Int. Inf. Syst. 2015, 9. [Google Scholar] [CrossRef]
- Jouhari, M.; Ibrahimi, K.; Benattou, M.; Kobbane, A. New greedy forwarding strategy for UWSNs geographic routing protocols. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; pp. 388–393. [Google Scholar]
- Nasir, H.; Javaid, N.; Murtaza, M.; Manzoor, S.; Khan, Z.A.; Qasim, U.; Sher, M. ACE: Adaptive cooperation in EEDBR for underwater wireless sensor networks. In Proceedings of the 2014 Ninth International Conference on Broadband and Wireless Computing, Communication and Applications, Guangdong, China, 8–10 November 2014; pp. 8–14. [Google Scholar]
- Shah, P.M.; Ullah, I.; Khan, T.; Hussain, M.S.; Khan, Z.A.; Qasim, U.; Javaid, N. MobiSink: Cooperative routing protocol for underwater sensor networks with sink mobility. In Proceedings of the 2016 IEEE 30th International Conference on Advanced Information Networking and Applications (AINA), Crans-Montana, Switzerland, 23–25 March 2016; pp. 189–197. [Google Scholar]
- Javaid, N.; Jafri, M.R.; Khan, Z.A.; Qasim, U.; Alghamdi, T.A.; Ali, M. Iamctd: Improved adaptive mobility of courier nodes in threshold-optimized dbr protocol for underwater wireless sensor networks. Int. J. Distrib. Sens. Netw. 2014, 10, 213012. [Google Scholar] [CrossRef]
- Maqsood, H.; Javaid, N.; Zain-ul-Abidin, M.; Ejaz, M.; Shakeel, U. Energy balanced interference aware energy efficient depth base routing protocol for UWSNs. In Proceedings of the 2015 10th International Conference on Broadband and Wireless Computing, Communication and Applications (BWCCA), Krakow, Poland, 4–6 November 2015; pp. 13–19. [Google Scholar]
- Ahmed, S.; Javaid, N.; Ahmad, A.; Ahmed, I.; Durrani, M.Y.; Ali, A.; Haider, S.B.; Ilahi, M. SPARCO: Stochastic performance analysis with reliability and cooperation for underwater wireless sensor networks. J. Sens. 2016. [Google Scholar] [CrossRef]
- Ahmad, A.; Ahmed, S.; Imran, M.; Alam, M.; Niaz, I.A.; Javaid, N. On energy efficiency in underwater wireless sensor networks with cooperative routing. Ann. Telecommun. 2017, 72, 173–188. [Google Scholar] [CrossRef]
- Han, G.; Liu, L.; Jiang, J.; Shu, L.; Rodrigues, J.J. A collaborative secure localization algorithm based on trust model in underwater wireless sensor networks. Sensors 2016, 16, 229. [Google Scholar] [CrossRef] [PubMed]
- Javaid, N.; Maqsood, H.; Wadood, A.; Niaz, I.A.; Almogren, A.; Alamri, A.; Ilahi, M. A localization based cooperative routing protocol for underwater wireless sensor networks. Mob. Inf. Syst. 2017. [Google Scholar] [CrossRef]
- Javaid, N.; Hussain, S.; Ahmad, A.; Imran, M.; Khan, A.; Guizani, M. Region based cooperative routing in underwater wireless sensor networks. J. Netw. Comput. Appl. 2017, 92, 31–41. [Google Scholar] [CrossRef]
- Hao, K.; Shen, H.; Liu, Y.; Wang, B.; Du, X. Integrating Localization and Energy-Awareness: A Novel Geographic Routing Protocol for Underwater Wireless Sensor Networks. Mob. Netw. Appl. 2018, 1–9. [Google Scholar] [CrossRef]
- Ali, M.T.; Rahim, S.S.; Jan, M.A.; Ishtiaq, A.; Ahmed, S.; Ahmad, M.; Khan, M.; Khan, M.A. Dist-Coop: Distributed Cooperative Transmission in UWSNs using Optimization Congestion Control and Opportunistic Routing. Int. J. Adv. Comput. Sci. Appl. 2018, 9, 356–368. [Google Scholar] [CrossRef]
- Hafeez, T.; Javaid, N.; Shakeel, U.; Hussain, S.; Maqsood, H. An Energy Efficient Adaptive Cooperative Routing Protocol for Underwater WSNs. In Proceedings of the 2015 10th International Conference on Broadband and Wireless Computing, Communication and Applications (BWCCA), Krakow, Poland, 4–6 November 2015; pp. 304–310. [Google Scholar]
- Shah, M.; Javaid, N.; Imran, M.; Guizani, M.; Khan, Z.A.; Qasim, U. Interference aware inverse EEDBR protocol for underwater WSNs. In Proceedings of the 2015 International Wireless Communications and Mobile Computing Conference (IWCMC), Dubrovnik, Croatia, 24–28 August 2015; pp. 739–744. [Google Scholar]
- Rahman, M.A.; Lee, Y.; Koo, I. EECOR: An energy-efficient cooperative opportunistic routing protocol for Underwater acoustic sensor networks. IEEE Access 2017, 5, 14119–14132. [Google Scholar] [CrossRef]
- Umar, A.; Akbar, M.; Iqbal, Z.; Khan, Z.A.; Qasim, U.; Javaid, N. Cooperative partner nodes selection criteria for cooperative routing in underwater WSNs. In Proceedings of the 2015 5th National Symposium on Information Technology: Towards New Smart World (NSITNSW), Riyadh, Saudi Arabia, 17–19 February 2015; pp. 1–7. [Google Scholar]
- Pervaiz, K.; Wahid, A.; Sajid, M.; Khizar, M.; Khan, Z.A.; Qasim, U.; Javaid, N. DEAC: Depth and energy aware cooperative routing protocol for underwater wireless sensor networks. In Proceedings of the 2016 10th International Conference on Complex, Intelligent, and Software Intensive Systems (CISIS), Fukuoka, Japan, 6–8 July 2016; pp. 150–158. [Google Scholar]
- Khan, A.; Ejaz, M.; Javaid, N.; Azeemi, M.Q.; Qasim, U.; Khan, Z.A. EEORS: Energy Efficient Optimal Relay Selection Protocol for Underwater WSNs. In Proceedings of the 2016 19th International Conference on Network-Based Information Systems (NBiS), Ostrava, Czech Republic, 7–9 September 2016; pp. 239–245. [Google Scholar]
- Umar, A.; Javaid, N.; Ahmad, A.; Khan, Z.A.; Qasim, U.; Alrajeh, N.; Hayat, A. DEADS: depth and energy aware dominating set based algorithm for cooperative routing along with sink mobility in underwater WSNs. Sensors 2015, 15, 14458–14486. [Google Scholar] [CrossRef] [PubMed]
- Tsiropoulou, E.E.; Paruchuri, S.T.; Baras, J.S. Interest, energy and physical-aware coalition formation and resource allocation in smart IoT applications. In Proceedings of the 2017 51st Annual Conference on Information Sciences and Systems (CISS), Baltimore, MD, USA, 22–24 March 2017; pp. 1–6. [Google Scholar]
- Lin, C.R.; Gerla, M. Adaptive clustering for mobile wireless networks. IEEE J. Sel. Areas Commun. 1997, 15, 1265–1275. [Google Scholar] [CrossRef]
- Tsiropoulou, E.E.; Mitsis, G.; Papavassiliou, S. Interest-aware energy collection and resource management in machine to machine communications. Ad Hoc Netw. 2018, 68, 48–57. [Google Scholar] [CrossRef]
- Gerla, M.; Kwon, T.J.; Pei, G. On-demand routing in large ad hoc wireless networks with passive clustering. In Proceedings of the 2000 IEEE Wireless Communications and Networking Conference, Chicago, IL, USA, 23–28 September 2000; Volume 1, pp. 100–105. [Google Scholar]
- Tsiropoulou, E.E.; Koukas, K.; Papavassiliou, S. A socio-physical mobility-aware coalition formation in public safety networks. EAI Endorsed Trans. 2018, 3, 1–9. [Google Scholar] [CrossRef]
- Gerla, M.; Tsai, J.T.C. Multicluster, mobile, multimedia radio network. Wirel. Netw. 1995, 1, 255–265. [Google Scholar] [CrossRef]
- Majid, A.; Azam, I.; Waheed, A.; Zain-ul-Abidin, M.; Hafeez, T.; Khan, Z.A.; Qasim, U.; Javaid, N. An energy efficient and balanced energy consumption cluster based routing protocol for underwater wireless sensor networks. In Proceedings of the 2016 IEEE 30th International Conference on Advanced Information Networking and Applications (AINA), Crans-Montana, Crans-Montana, Switzerland, 23–25 March 2016; pp. 324–333. [Google Scholar]
- El-Darymli, K. Amplify-and-forward cooperative relaying for a linear wireless sensor network. In Proceedings of the 2010 IEEE International Conference on Systems, Man and Cybernetics, Istanbul, Turkey, 10–13 October 2010; pp. 106–112. [Google Scholar]
- Laneman, J.N.; Tse, D.N.; Wornell, G.W. Cooperative diversity in wireless networks: Efficient protocols and outage behavior. IEEE Trans. Inf. Theory 2004, 50, 3062–3080. [Google Scholar] [CrossRef]
- Al Salti, F.; Alzeidi, N.; Arafeh, B.R. EMGGR: An energy-efficient multipath grid-based geographic routing protocol for underwater wireless sensor networks. Wirel. Netw 2017, 23, 1301–1314. [Google Scholar] [CrossRef]
- Li, M.; Du, X.; Huang, K.; Hou, S.; Liu, X. A routing protocol based on received signal strength for underwater wireless sensor networks (UWSNs). Information 2017, 8, 153. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Protocol | Features | Advantages | Shortcomings | Reference |
|---|---|---|---|---|
| EACE | The protocol involves energy efficient and cooperative mechanisms. The best destination nodes are selected based on maximum residual energy and lowest depth. | The network lifetime is good and has maximum packet acceptance ratio. | As a result of cooperation, delay of the network increases and the nodes nearer the final destination nodes have higher death ratio. | [19] |
| IAIEEDBR | The protocol selects the destination nodes based on depth, residual energy and number of hops. | Energy consumption is economical, network lifetime is improved and interference is reduced. | Network delay increases. Nodes closer to the final destination are used most often and thus die more quickly. | [20] |
| EECOR | In this protocol, from the relay set, the best relay node is selected using Fuzzy logic. The destination nodes are chosen using depth and residual energy information. | It consumes less energy, minimizes the delay and increases the PDR. | There is no mechanism for checking if data packets are correct or erroneous. | [21] |
| Coop | This algorithm is cooperation based. The depth and residual energy values are used to select the destination and relay nodes with their link with the source nodes and SNR. | This protocol is good in term of packet acceptance ratio. | The protocol is cooperation based, thus the delay increases. | [22] |
| DEAC | Choosing the destination nodes requires information on three parameters: energy that resides in a node’s battery, depth and link quality. Depth threshold (Dth) focuses on alive nodes and varies according to it. | The packet acceptance ratio increases at the final destination. | It has high energy consumption. | [23] |
| RBCRP | In this localization based protocol, the selection criteria of destination and relay nodes are depth, residual energy and SNR values. The RSSI is used to find the location of the nodes. | Packets dropped decreases, as does the error probability. | It increases the consummation of energy. | [16] |
| EEORS | The protocol is energy efficient and the optimal relay nodes have the depth zone from 400 to 600 m. The nodes in this range are relay nodes for lower zone nodes. | Economical utilization of energy. | A single sink increases network delay. | [24] |
| Protocol | Features | Advantages | Shortcomings | Reference |
|---|---|---|---|---|
| CO-EEORS | The best destination nodes are selected in this protocol based on lowest depth and distance values. If no relay nodes are found in neighborhood, then only destination nodes are selected. The MRC technique is used at the destination nodes. | It increases the packets delivery ratio and decreases the packets drop. | It increases the energy consumption and delay. | [5] |
| DEADS | In this protocol, the network is divided into four zones based on depth. Depth threshold mechanism avoids data flooding. Power residing in a node’s battery and its depth decide its selection as a relay or as a destination. The nodes can move in the elliptical and linear direction. | It improves the network lifetime and packets delivery ratio. | The protocol fails in elliptical mobility pattern optimization, which increases packets drop. | [25] |
| i-q,q,i approach | The coalition, physical awareness, link quality, and energy efficiency are the main goals of the proposed work. The energy usage of the devices is reduced when IOT devices communicate with each other, through the above factors. | The proposed work is best to increase the life of the framework. | How to achieve maximum PDR is not discussed. | [26] |
| ACMWN | The algorithm defines a new clustering technique with good quality. The main task of the approach is to avail the techniques with maximum throughput and less delay. Selecting only one cluster eliminates the interference | The main achievement of the algorithm is to reduce the drop of packets, enhancing the transmission. | The framework has limited bandwidth. | [27] |
| I,IP,P | The standby algorithm design is independent in properties, management and adaptation. The self energy adaptation mechanism is introduced. By using utility function, energy consumption will vary with the cluster head. | The goal is to enhance the energy and independence of the cluster. | The battery is fixed and not rechargeable. | [28] |
| AODV/PC | The scheme considers no mobility which avoids the complexity in getting nearby information and link measurement. Many clusters can be made more easily than the traditional mechanisms. | It avoids the high traffic on clusters. | The scheme follows a challenging mechanism to collect nearby nodes data. | [29] |
| S-PMAC | This framework uses advanced multiplexing wireless technique to deliver data between two devices. The physical and social behaviors of the users are used in connecting two devices. Similar nearby users with the same mobility can be found in a user field through a reference point. | This approach helps connect two users using less energy. | The framework can be damaged through disaster occurrence. | [30] |
| MCMMRNs | The multiplexing in time and code is used to deal with many-media services. The distributing method is used for clustering. The head of clusters are responsible for managing and making available the channel, power, time and its reuse according to conditions. | It reduces the failure of connectivity | No backup wire arrangement developed. | [31] |
| Protocol | Cooperation | Sink Nodes | Depth Threshold | Nodes Selection Parameters |
|---|---|---|---|---|
| LFEER | Not involved. | Placed at the top of the water and static. | Fixed. | Residual energy, A Number of hops, Bit error rate. |
| Co-LFEER | Involved with one relay node. | Placed at the top of the water surface and static. | Fixed. | Residual energy, A Number of hops, Bit error rate. |
| Co-DBR | Involved with two relay nodes. | Static and placed at upper surface of the water. | Fixed. | Depth. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shah, S.; Khan, A.; Ali, I.; Ko, K.-M.; Mahmood, H. Localization Free Energy Efficient and Cooperative Routing Protocols for Underwater Wireless Sensor Networks. Symmetry 2018, 10, 498. https://doi.org/10.3390/sym10100498
Shah S, Khan A, Ali I, Ko K-M, Mahmood H. Localization Free Energy Efficient and Cooperative Routing Protocols for Underwater Wireless Sensor Networks. Symmetry. 2018; 10(10):498. https://doi.org/10.3390/sym10100498
Chicago/Turabian StyleShah, Sahar, Anwar Khan, Ihsan Ali, Kwang-Man Ko, and Hasan Mahmood. 2018. "Localization Free Energy Efficient and Cooperative Routing Protocols for Underwater Wireless Sensor Networks" Symmetry 10, no. 10: 498. https://doi.org/10.3390/sym10100498
APA StyleShah, S., Khan, A., Ali, I., Ko, K.-M., & Mahmood, H. (2018). Localization Free Energy Efficient and Cooperative Routing Protocols for Underwater Wireless Sensor Networks. Symmetry, 10(10), 498. https://doi.org/10.3390/sym10100498