Predicting Land Use Changes in Philadelphia Following Green Infrastructure Policies


Abstract
:1. Introduction
2. Study Area
3. Materials and Methods
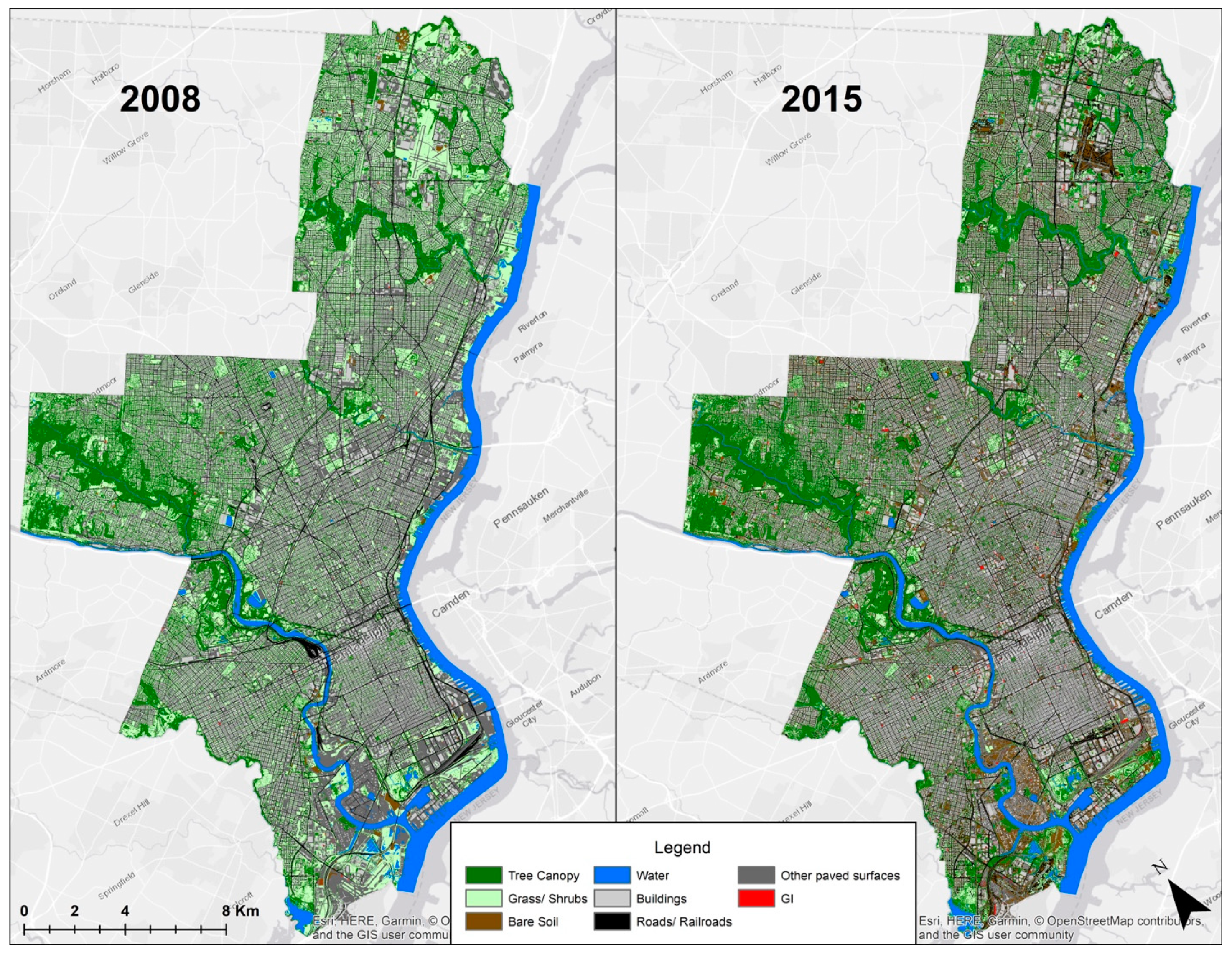
3.1. Data and Preprocessing
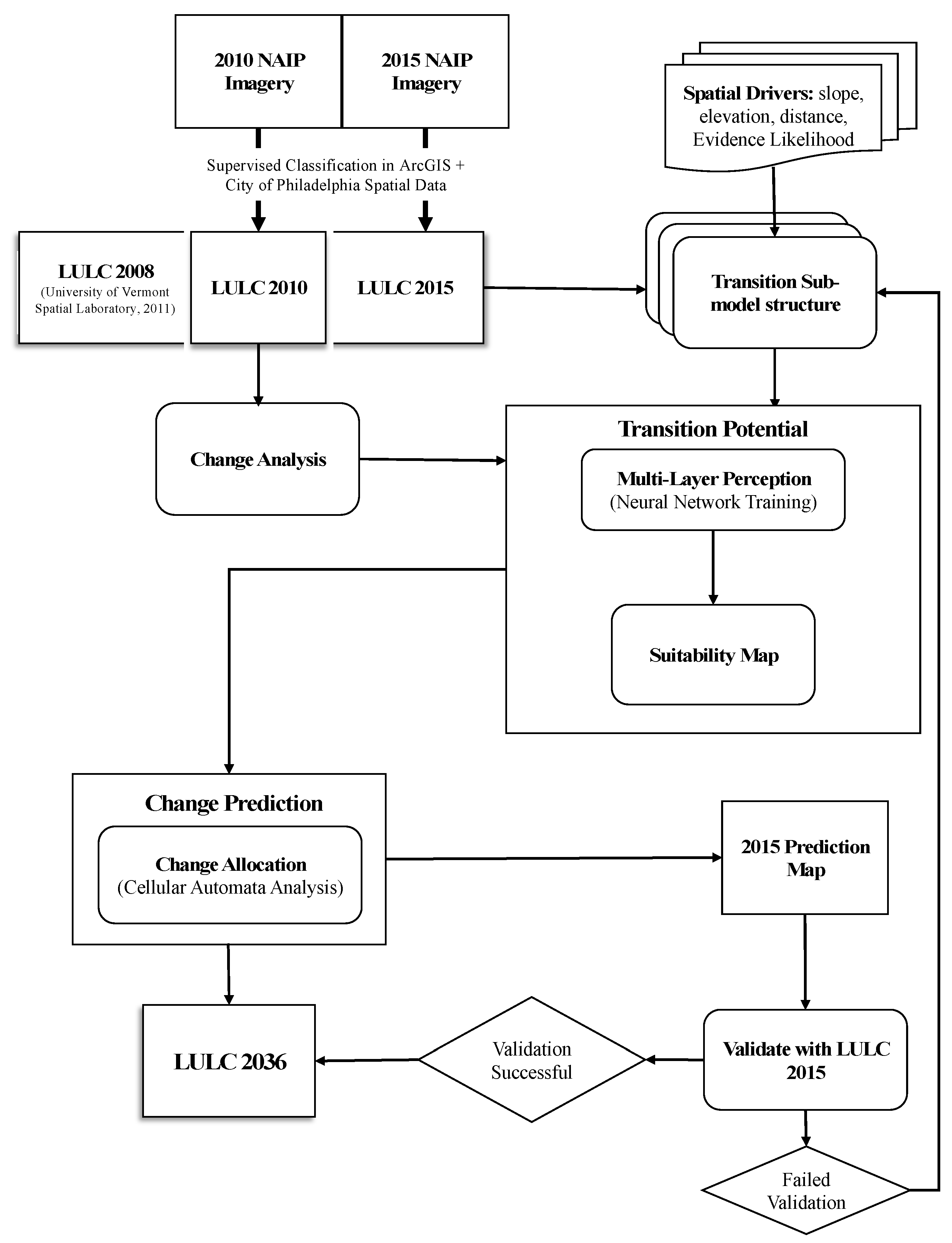
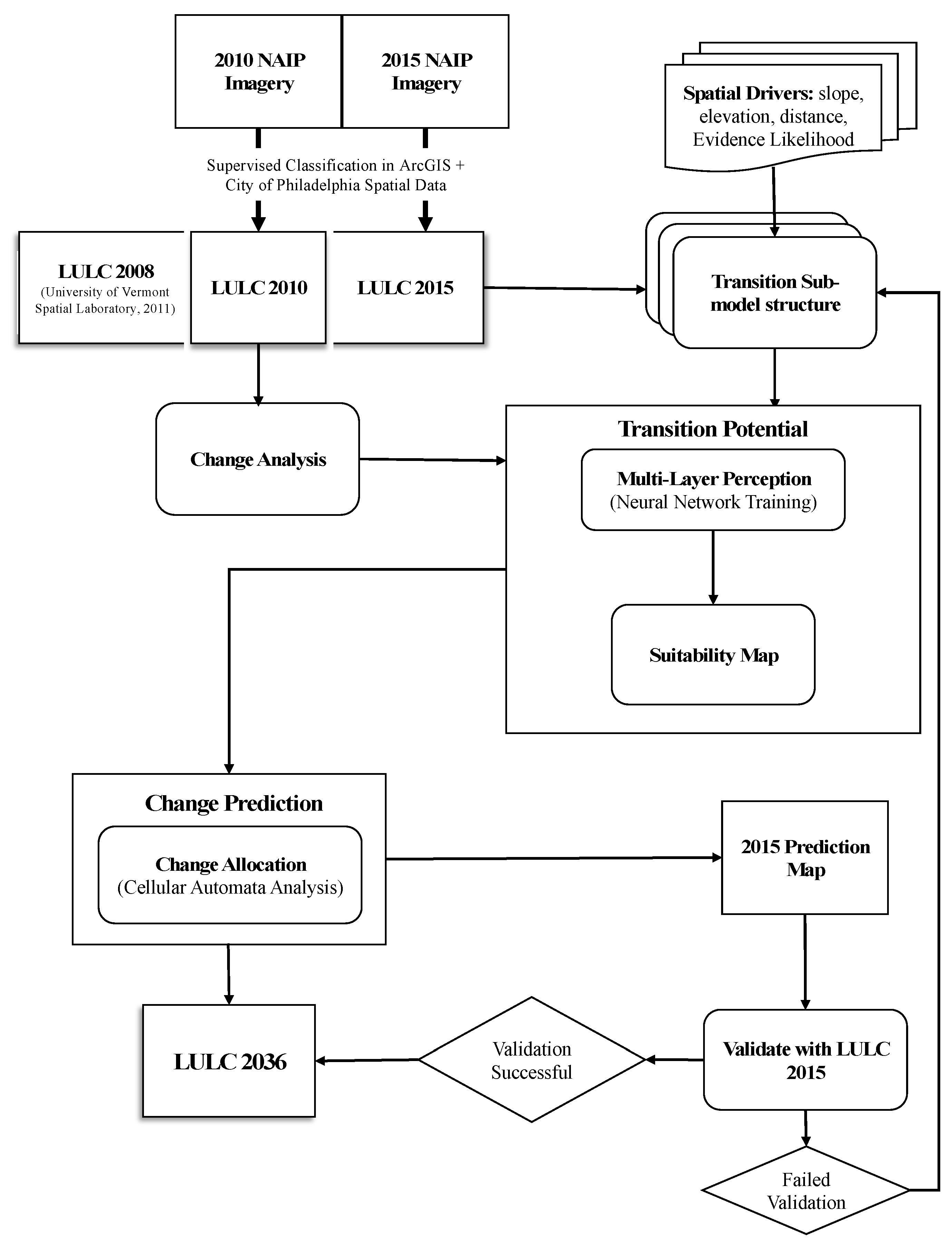
3.2. LULCC Model and Validation
3.2.1. Change Analysis
3.2.2. Drivers of Change
3.2.3. Rules and Restrictions
3.2.4. Transition Predictions Using Markov Chain Analysis
3.2.5. Validation
3.3. Modeling Green Infrastructure
3.3.1. Drivers of Change
3.3.2. Change Allocation
3.3.3. Amount of Change
3.3.4. Validation
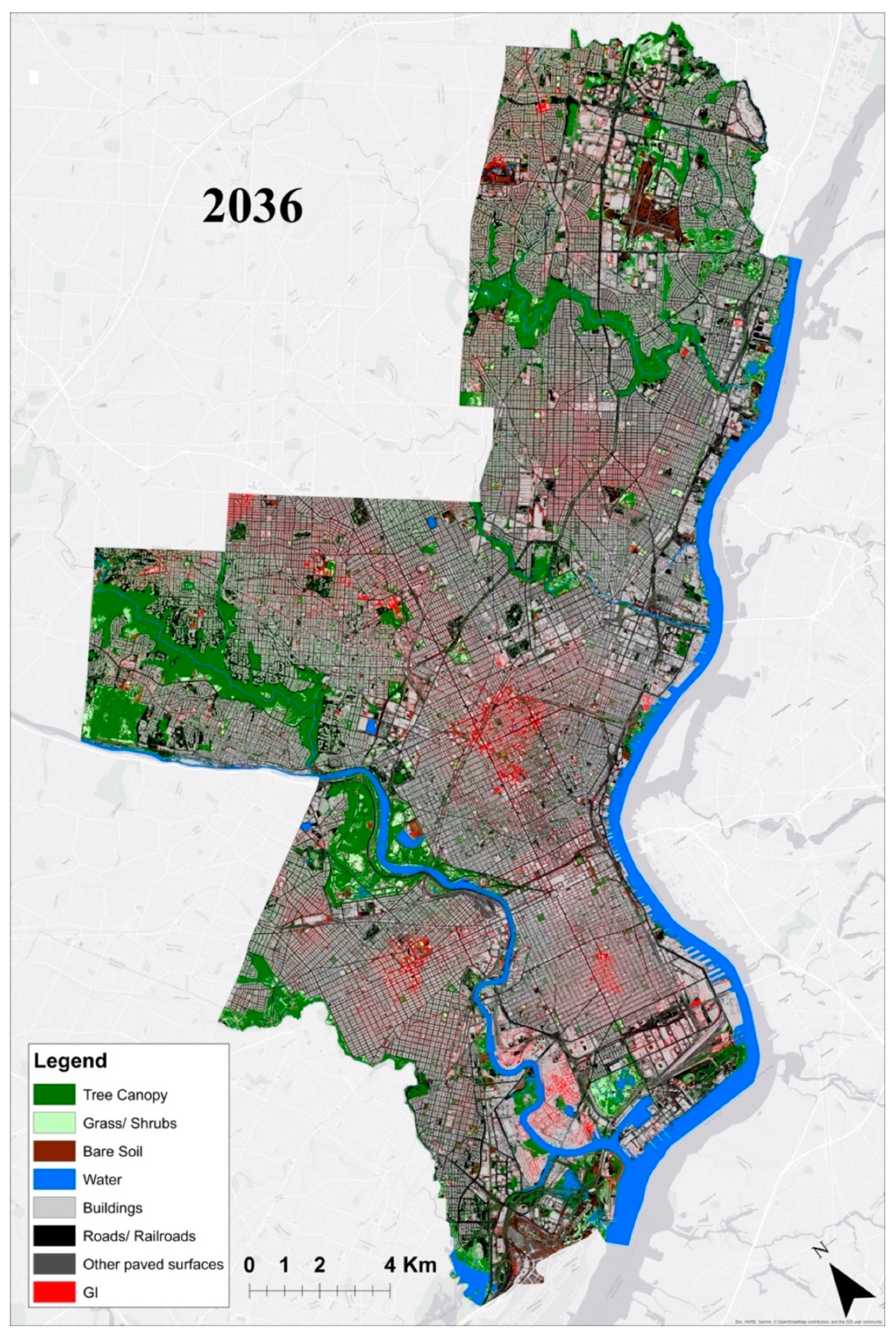
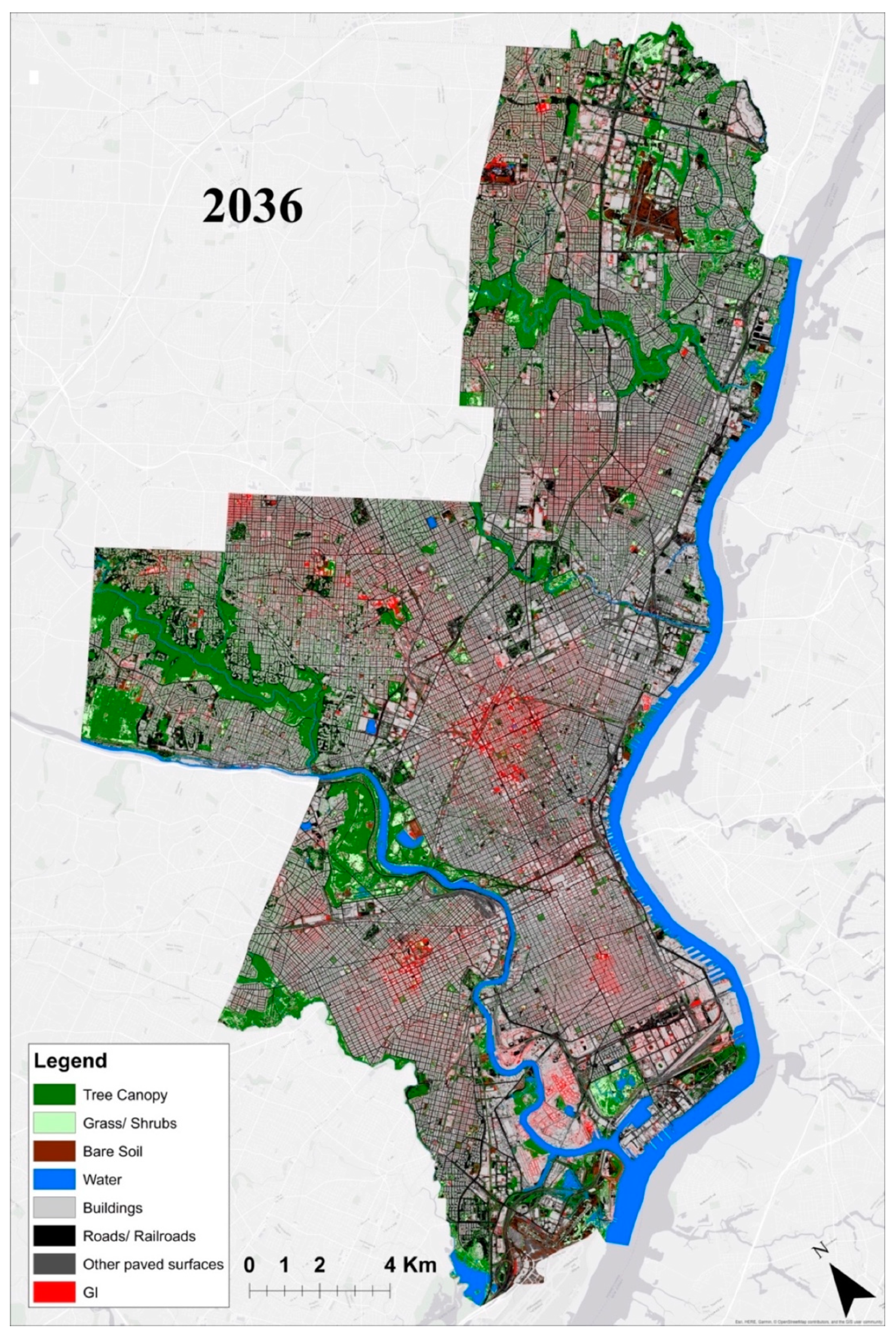
3.4. Final 2036 LULC
3.5. Landscape Metrics
4. Results
4.1. Validation Results
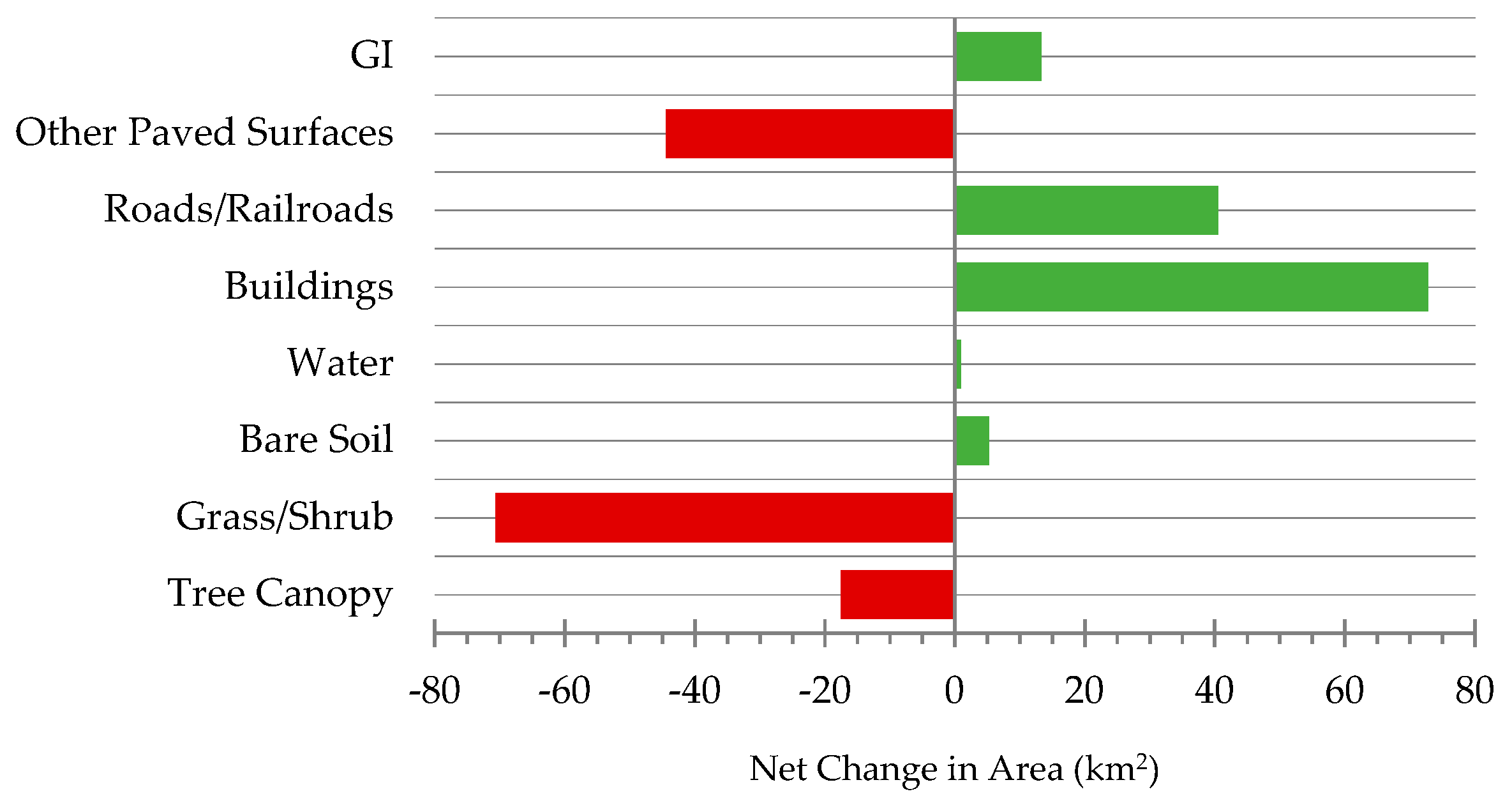
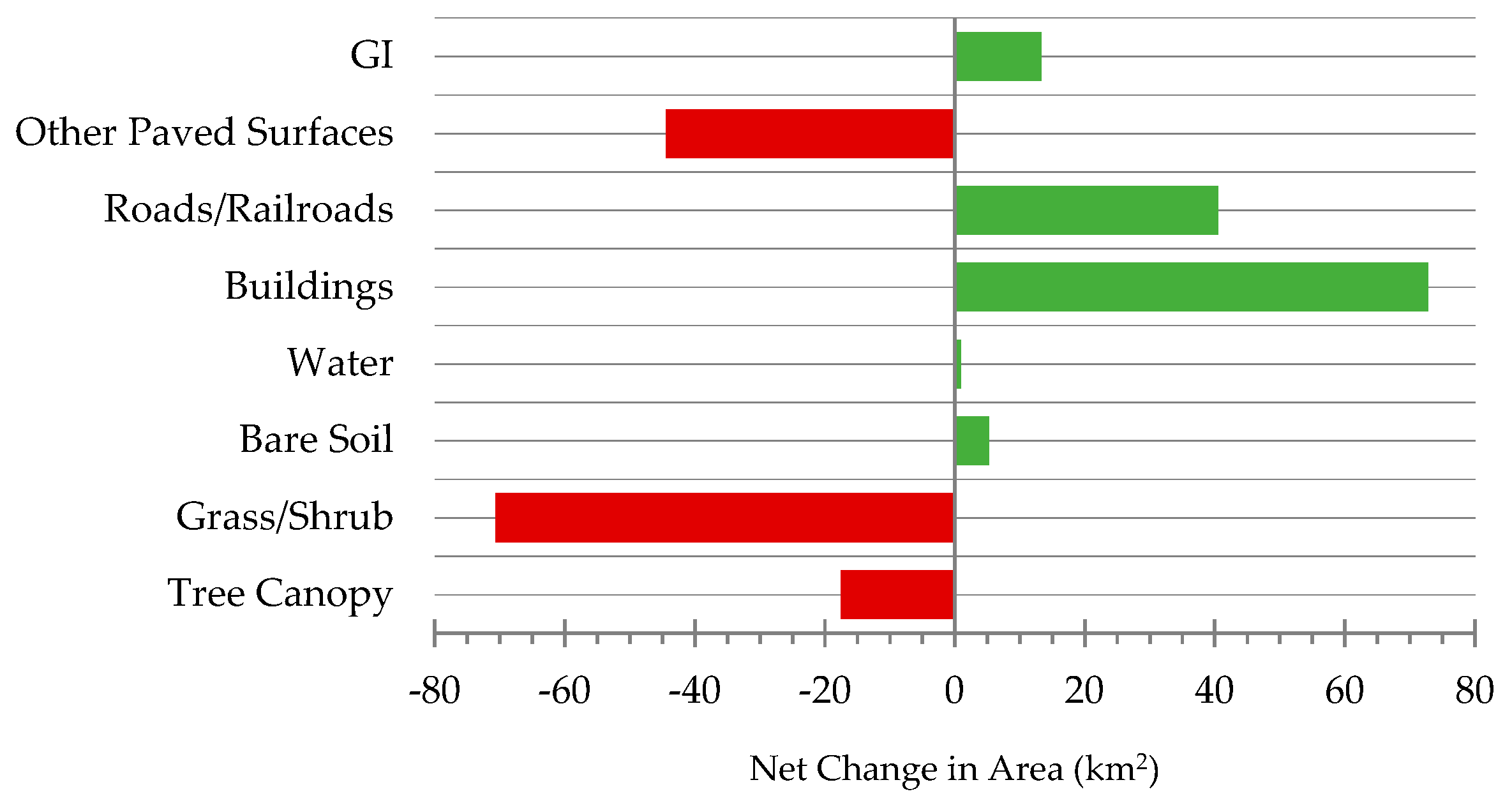
4.2. Landcover Changes
4.3. Spatial Metrics
5. Discussion
5.1. Data Resolution
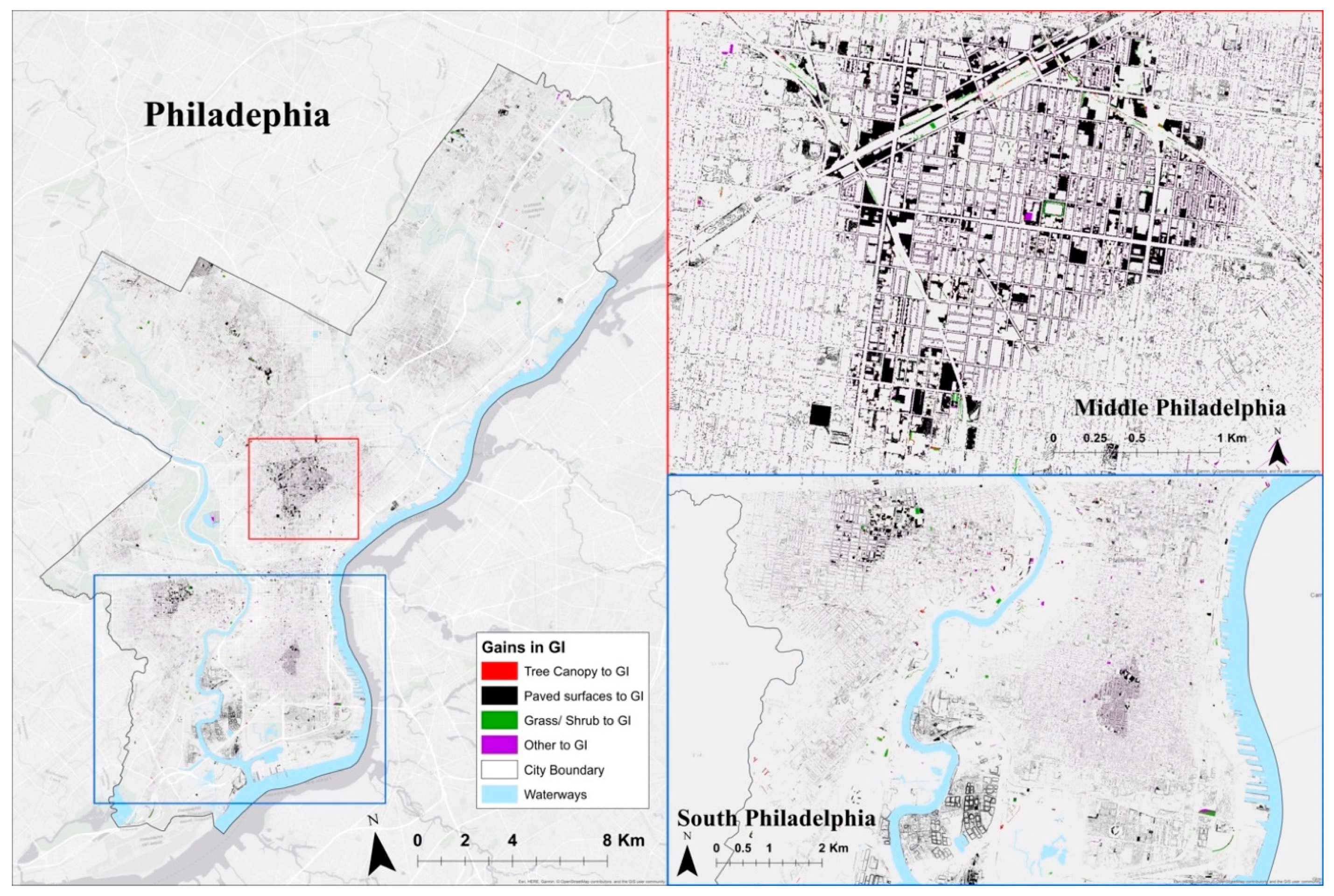
5.2. Green Infrastructure
5.3. Urbanization Land Use/Landcover Changes
5.4. Future Research
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
References
- Millennium Ecosystem Assessment. Ecosystems and Human Well-Being: Synthesis; Millennium Ecosystem Assessment: Washington, DC, USA, 2005. [Google Scholar]
- Megahed, Y.; Cabral, P.; Silva, J.; Caetano, M. Land Cover Mapping Analysis and Urban Growth Modelling Using Remote Sensing Techniques in Greater Cairo Region—Egypt. ISPRS Int. J. Geo-Inf. 2015, 4, 1750–1769. [Google Scholar] [CrossRef]
- Bauduceau, N.; Berry, P.; Cecchi, C.; Elmqvist, T.; Fernandez, M.; Hartig, T.; Krull, W.; Mayerhofer, E.; Sandra, N.; Noring, L. Towards an EU Research and Innovation Policy Agenda for Nature-Based Solutions & Re-Naturing Cities: Final Report of the Horizon 2020 Expert Group on ‘Nature-Based Solutions and Re-Naturing Cities’; Publications Office of the European Union: Brussels, Belgium, 2015. [Google Scholar]
- Nesshöver, C.; Assmuth, T.; Irvine, K.N.; Rusch, G.M.; Waylen, K.A.; Delbaere, B.; Haase, D.; Jones-walters, L.; Keune, H.; Kovacs, E.; et al. The science, policy and practice of nature-based solutions: An interdisciplinary perspective. Sci. Total Environ. 2017, 579, 1215–1227. [Google Scholar] [CrossRef] [PubMed]
- Benedict, M.A.; McMahon, E.T. Green Infrastructure: Linking Landscapes and Communities, 2nd ed.; Island Press: Washington, DC, USA, 2006; ISBN 978-1559635585. [Google Scholar]
- Nakicenovic, N.; Davidson, O.E. IPCC Special Report on Emission Scenarios; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Swart, R.J.; Raskin, P.; Robinson, J. The problem of the future: Sustainability science and scenario analysis. Glob. Environ. Chang. 2004, 14, 137–146. [Google Scholar] [CrossRef]
- Peterson, G.D.; Cumming, G.S.; Carpenter, S.R. Scenario Planning: A Tool for Conservation in an Uncertain World. Conserv. Biol. 2003, 17, 358–366. [Google Scholar] [CrossRef]
- Tewolde, M.G.; Cabral, P. Urban sprawl analysis and modeling in Asmara, Eritrea. Remote Sens. 2011, 3, 2148–2165. [Google Scholar] [CrossRef]
- Abuelaish, B.; Olmedo, M.T.C. Scenario of land use and land cover change in the Gaza Strip using remote sensing and GIS models. Arab. J. Geosci. 2016, 9, 274. [Google Scholar] [CrossRef]
- Pontius, R.G.; Boersma, W.; Castella, J.C.; Clarke, K.; Nijs, T.; Dietzel, C.; Duan, Z.; Fotsing, E.; Goldstein, N.; Kok, K.; et al. Comparing the input, output, and validation maps for several models of land change. Ann. Reg. Sci. 2008, 42, 11–37. [Google Scholar] [CrossRef]
- Prestele, R.; Alexander, P.; Rounsevell, M.D.A.; Arneth, A.; Calvin, K.; Doelman, J.; Eitelberg, D.A.; Engström, K.; Fujimori, S.; Hasegawa, T. Hotspots of uncertainty in land-use and land-cover change projections: A global-scale model comparison. Glob. Chang. Biol. 2016, 22, 3967–3983. [Google Scholar] [CrossRef] [PubMed]
- Sakieh, Y.; Salmanmahiny, A. Performance assessment of geospatial simulation models of land-use change—A Landscape metric-based approach. Environ. Monit. Assess. 2016, 188, 1–16. [Google Scholar] [CrossRef]
- Chen, H.; Pontius, R.G. Diagnostic tools to evaluate a spatial land change projection along a gradient of an explanatory variable. Landsc. Ecol. 2010, 25, 1319–1331. [Google Scholar] [CrossRef]
- Poelmans, L.; Van Rompaey, A. Detecting and modelling spatial patterns of urban sprawl in highly fragmented areas: A case study in the Flanders-Brussels region. Landsc. Urban Plan. 2009, 93, 10–19. [Google Scholar] [CrossRef]
- Martins, V.N.; Cabral, P.; Sousa e Silva, D. Urban modelling for seismic prone areas: The case study of Vila Franca do Campo (Azores Archipelago, Portugal). Nat. Hazards Earth Syst. Sci. 2012, 12, 2731–2741. [Google Scholar] [CrossRef]
- Pinto, A.P.; Cabral, P.; Caetano, M.; Alves, M.F.; Pintot, P.; Cabralf, P.; Caetanoi, M.; Alvest, M.F. Urban Growth on Coastal Erosion Vulnerable Stretches. J. Coast. Res. 2018, II, 1567–1571. [Google Scholar]
- Nelson, E.; Sander, H.; Hawthorne, P.; Conte, M.; Ennaanay, D.; Wolny, S.; Manson, S.; Polasky, S. Projecting global land-use change and its effect on ecosystem service provision and biodiversity with simple models. PLoS ONE 2010, 5, e14327. [Google Scholar] [CrossRef] [PubMed]
- Pickard, B.; Gray, J.; Meentemeyer, R. Comparing Quantity, Allocation and Configuration Accuracy of Multiple Land Change Models. Land 2017, 6, 52. [Google Scholar] [CrossRef]
- Mishra, V.; Rai, P.; Mohan, K. Prediction of land use changes based on land change modeler (LCM) using remote sensing: A case study of Muzaffarpur (Bihar), India. J. Geogr. Inst. Jovan CvijicSasa 2014, 64, 111–127. [Google Scholar] [CrossRef]
- Liu, J.; Li, J.; Qin, K.; Zhou, Z.; Yang, X.; Li, T. Changes in land-uses and ecosystem services under multi-scenarios simulation. Sci. Total Environ. 2017, 586, 522–526. [Google Scholar] [CrossRef] [PubMed]
- Gibson, L.; Münch, Z.; Palmer, A.; Mantel, S. Future land cover change scenarios in South African grasslands—Implications of altered biophysical drivers on land management. Heliyon 2018, 4, e00693. [Google Scholar] [CrossRef]
- Andriamasimanana, R.H.; Cameron, A. Spatio-Temporal Change in Crowned (Propithecus coronatus) and Decken’s Sifaka (Propithecus deckenii) Habitat in the Mahavavy-Kinkony Wetland Complex, Madagascar. Primate Conserv. 2014, 28, 65–71. [Google Scholar] [CrossRef]
- Mahmoud, M.I.; Duker, A.; Conrad, C.; Thiel, M.; Ahmad, H.S. Analysis of settlement expansion and urban growth modelling using geoinformation for assessing potential impacts of urbanization on climate in Abuja City, Nigeria. Remote Sens. 2016, 8, 220. [Google Scholar] [CrossRef]
- Anand, J.; Gosain, A.K.; Khosa, R. Prediction of land use changes based on Land Change Modeler and attribution of changes in the water balance of Ganga basin to land use change using the SWAT model. Sci. Total Environ. 2018, 644, 503–519. [Google Scholar] [CrossRef] [PubMed]
- Reddy, C.S.; Singh, S.; Dadhwal, V.K.; Jha, C.S.; Rao, N.R.; Diwakar, P.G. Predictive modelling of the spatial pattern of past and future forest cover changes in India. J. Earth Syst. Sci. 2017, 126, 8. [Google Scholar] [CrossRef]
- Ahmed, B.; Kamruzzaman, M.D.; Zhu, X.; Shahinoor Rahman, M.D.; Choi, K. Simulating land cover changes and their impacts on land surface temperature in dhaka, bangladesh. Remote Sens. 2013, 5, 5969–5998. [Google Scholar] [CrossRef]
- Mitsova, D.; Shuster, W.; Wang, X. A cellular automata model of land cover change to integrate urban growth with open space conservation. Landsc. Urban Plan. 2011, 99, 141–153. [Google Scholar] [CrossRef]
- Paegelow, M.; Camacho Olmedo, M.T.; Mas, J.-F.; Houet, T.; Pontius, R.G., Jr. Land change modelling: Moving beyond projections. Int. J. Geogr. Inf. Sci. 2013, 27, 1691–1695. [Google Scholar] [CrossRef]
- Eigenbrod, F.; Bell, V.A.; Davies, H.N.; Heinemeyer, A.; Armsworth, P.R.; Gaston, K.J. The impact of projected increases in urbanization on ecosystem services. Proc. Biol. Sci. 2011, 278, 3201–3208. [Google Scholar] [CrossRef]
- Clarke, K.C. SLEUTH [Software]; Gigalopolis: Santa Barbara, CA, USA, 1993. [Google Scholar]
- Clark Labs. TerrSet (18.3) [Software]; Clark University: Worcester, MA, USA, 2017. [Google Scholar]
- Pontius, R.G., Jr.; Chen, H. GEOMOD Modeling. In Idrisi 15: The Andes Edition; Clark University: Worcester, MA, USA, 2006; pp. 1–44. [Google Scholar]
- Carbonell, J.G.; Michalski, R.S.; Mitchell, T.M. An Overview of Machine Learning. In Machine Learning: An Artificial Intelligence Approach (Volume I); Michalski, R.S., Carbonell, J.G., Mitchell, T.M., Eds.; TIOGA Publishing Co.: Palo Alto, CA, USA, 1983; pp. 3–23. ISBN 978-1493303489. [Google Scholar]
- Clark Labs. TerrSet (18.3) [Help System]; Clark University: Worcester, MA, USA, 2017. [Google Scholar]
- U.S. Census Bureau. 2016 American Community Survey 1-Year Estimates; American Fact Finder: Washington, DC, USA, 2016.
- Office of Sustainability. Greenworks: A Vision for a Sustainable Philadelphia; Office of Sustainability: Philadelphia, PA, USA, 2016. [Google Scholar]
- Philadelphia Water Department. Green City, Clean Waters: The City of Philadelphia’s Program for Combined Sewer Overflow Control; Philadelphia Water Department: Philadelphia, PA, USA, 2011.
- The City of Philadelphia Water Department. Green City, Clean Waters—Evaluation and Adaptation Plan; Philadelphia Water Department: Philadelphia, PA, USA, 2016.
- University of Vermont Spatial Analysis Laboratory. High Resolution Landcover; University of Vermont Spatial Analysis Laboratory: Philadelphia, PA, USA, 2008, 2011. [Google Scholar]
- Patel, D. City Limits; Philadelphia Department of Planning and Development: Philadelphia, PA, USA, 2016.
- Philadelphia Water Department. Green Stormwater Infrastructure Projects; Philadelphia Water Department: Philadelphia, PA, USA, 2018.
- USDA-FSA-APFO Aerial Photography Field Office. NAIP Digital Ortho Photo Image; USDA-FSA-APFO Aerial Photography Field Office: Philadelphia, PA, USA; Salt Lake City, UT, USA, 2010.
- USDA-FSA-APFO Aerial Photography Field Office. NAIP Digital Ortho Photo Image; USDA-FSA-APFO Aerial Photography Field Office: Philadelphia, PA, USA; Salt Lake City, UT, USA, 2015.
- ESRI. ArcMaps (10.5) [Software]; ESRI: Redlands, CA, USA, 2016. [Google Scholar]
- Department of Licenses and Inspection; Office of Innovation and Technology. Building Footprints; Department of Licenses and Inspection, Office of Innovation and Technology: Philadelphia, PA, USA, 2015.
- Office of Innovation and Technology. Impervious Surfaces; Office of Innovation and Technology: Philadelphia, PA, USA, 2004.
- Division of Technology GIS Service Group. Philadelphia Impervious Surfaces 2015; Division of Technology GIS Service Group: Philadelphia, PA, USA, 2015. [Google Scholar]
- Office of Innovation and Technology. Railroad Lines; Office of Innovation and Technology: Philadelphia, PA, USA, 2004.
- Philadelphia Water Department. Hydrology Polygons; Philadelphia Water Department: Philadelphia, PA, USA, 2015.
- Office of Innovation and Technology. LiDAR 2008; Office of Innovation and Technology: Philadelphia, PA, USA, 2008.
- Office of Innovation and Technology. LiDAR 2010; Office of Innovation and Technology: Philadelphia, PA, USA, 2010.
- Office of Innovation and Technology. LiDAR 2015; Office of Innovation and Technology: Philadelphia, PA, USA, 2015.
- De Noronha Vaz, E.; Caetano, M.; Nijkamp, P. Trapped between antiquity and urbanism—A multi-criteria assessment model of the greater Cairo Metropolitan area. J. Land Use Sci. 2011, 6, 283–299. [Google Scholar] [CrossRef]
- Eastman, J.R. TerrSet Manual: Geospatial Monitoring and Modeling System; Clark Labs Clark University: Worcester, MA, USA, 2016; p. 470. [Google Scholar]
- Nazzal, J.M.; El-emary, I.M.; Najim, S.A.; Ahliyya, A.; Box, P.O.; Arabia, K.S. Multilayer Perceptron Neural Network (MLPs) For Analyzing the Propoerties of Jordan Oil Shale. World Appl. Sci. J. 2008, 5, 546–552. [Google Scholar]
- Sibanda, W.; Pretorius, P. Novel Application of Multi-Layer Perceptrons (MLP) Neural Networks to Model HIV in South Africa using Seroprevalence Data from Antenatal Clinics. Int. J. Comput. Appl. 2011, 35, 26–31. [Google Scholar] [CrossRef]
- Nadoushan, M.A.; Soffianian, A.; Alebrahim, A. Predicting Urban Expansion in Arak Metropolitan Area Using Two Land Change Models. World Appl. Sci. J. 2012, 18, 1124–1132. [Google Scholar] [CrossRef]
- Kim, I.; Jeong, G.; Park, S.; Tenhunen, J. Predicted Land Use Change in the Soyang River Basin, South Korea. In Proceedings of the 2011 TERRECO Science Conference, Karlsruhe, Germany, 2–7 October 2011; pp. 17–24. [Google Scholar]
- Pontius, R.G.; Millones, M. Death to Kappa: Birth of quantity disagreement and allocation disagreement for accuracy assessment. Int. J. Remote Sens. 2011, 32, 4407–4429. [Google Scholar] [CrossRef]
- Rempel, R.S.; Kaukinen, D.; Carr, A.P. Patch Analyst and Patch Grid; Ontario Ministry of Natural Resources, Centre for Northern Forest Ecosystem Research: Thunder Bay, ON, USA, 2012.
- McGarigal, K.; Marks, B.J. FRAGSTATS: Spatial Pattern Analysis Program for Quantifying Landscape Structure, 2nd ed.; U.S. Department of Agriculture, Forest Service, Pacific Northwest Research Station: Portland, OR, USA, 1995.
- Philadelphia Water Department. Green City Clean Waters; Philadelphia Stormwater Dialogue: Philadelphia, PA, USA, 2011; p. 29.
- U.S. Census Bureau Population Division. Annual Estimates of the Resident Population: April 1, 2010 to July 1, 2017; U.S. Census Bureau Population Division: Suitland, MD, USA, 2018.
- Bell, M. County and Municipal-Level Population Forecasts, 2015–2045. Available online: https://www.dvrpc.org/webmaps/PopForecast/ (accessed on 24 January 2019).
- Kremer, P.; DeLiberty, T.L. Local food practices and growing potential: Mapping the case of Philadelphia. Appl. Geogr. 2011, 31, 1252–1261. [Google Scholar] [CrossRef]
- Seto, K.C.; Fragkias, M.; Guneralp, B.; Reilly, M. A Meta-Analysis of Global Urban Land Expansion. PLoS ONE 2011, 6, e23777. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area 2008 (km2) | Area 2015 (km2) | Difference (km2) | Percent Change | |
|---|---|---|---|---|
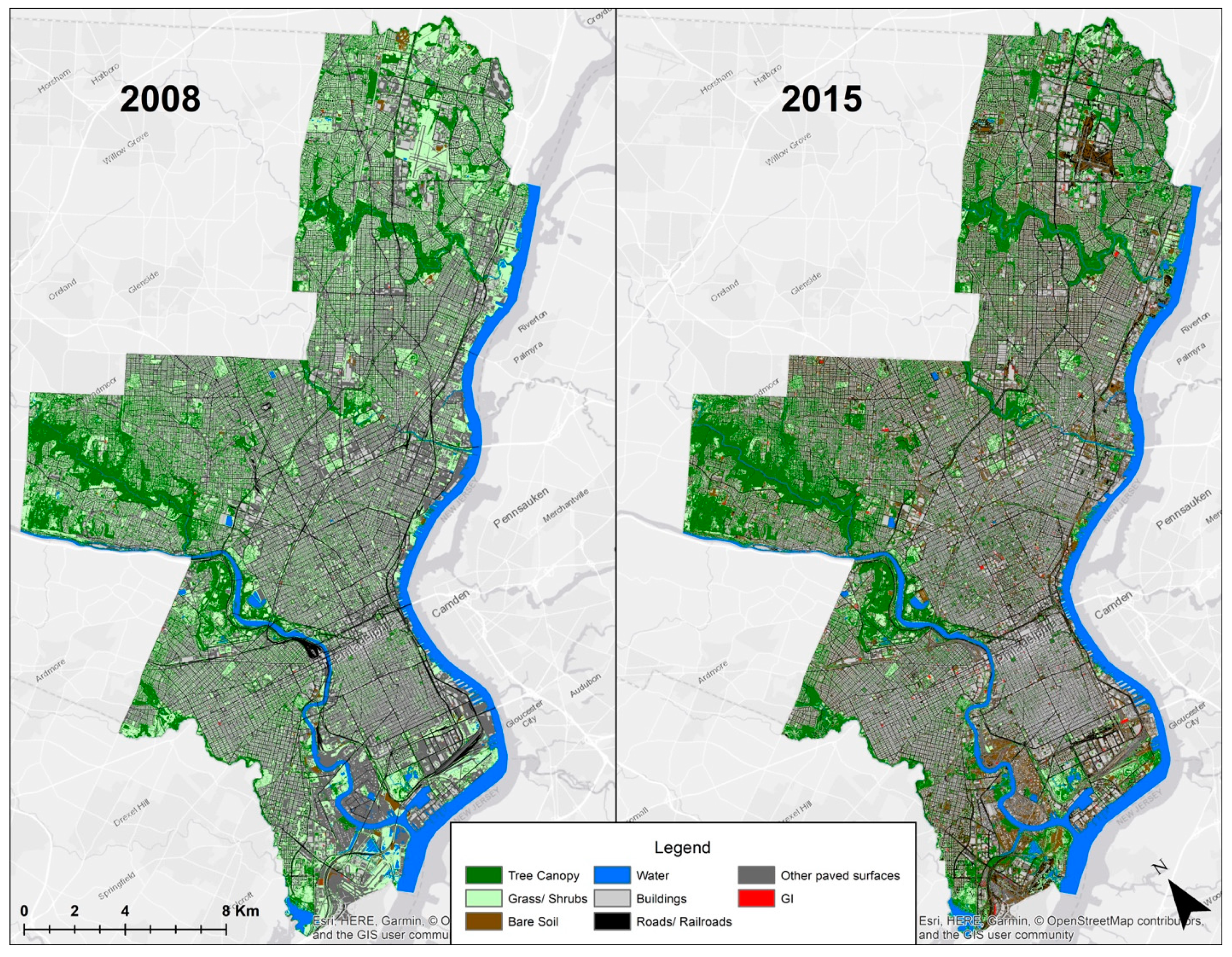
| Nature | 155.60 | 132.71 | −22.89 | −14.71% |
| Urban | 191.32 | 212.63 | 21.31 | 11.14% |
| Name | Type | Created by | Spatial Resolution | Reference |
|---|---|---|---|---|
| Landcover 2008 | Raster | University of Vermont Spatial Analysis Laboratory | 1 m | [37] |
| Landcover 2010 | Raster | Author | 1 m | -- |
| Landcover 2015 | Raster | Author | 1 m | -- |
| NAIP 2010 & 2015 | Aerial Imagery | United States Department of Agriculture | 1m | [43,44] |
| Philadelphia GI | Shapefile | Philadelphia Water Department | 1 m * | [42] |
| 2015 Building Footprint | Shapefile | City of Philadelphia | 1 m * | [46] |
| 2004 & 2015 Impervious Surfaces | Shapefile | City of Philadelphia | 1 m * | [47,48] |
| 2004 Railroads | Shapefile | City of Philadelphia | 1 m * | [49] |
| Hydrology | Shapefile | Philadelphia Water Department | 1 m * | [50] |
| City Limits | Shapefile | City of Philadelphia | -- | [41] |
| 08, 10, & 15 DEM | DEM | City of Philadelphia | 1 m | [51,52,53] |
| 08, 10, & 15 Slope | Raster | Author | 1 m | -- |
| Distance to roads & rivers | Raster | Author | 1 m | -- |
| Evidence Likelihood | Raster | Author | 1 m | -- |
| Year | Accuracy * | Tree Canopy | Grass/Shrubs | Bare Soil | Water | Buildings | Roads/Railroads | Paved Surfaces | Overall Accuracy | Kappa |
|---|---|---|---|---|---|---|---|---|---|---|
| 2010 | U Acc. | 100% | 80.0% | 66.7% | 86.7% | 66.7% | 73.3% | 86.7% | 80% | 0.767 |
| P Acc. | 75% | 66.7% | 83.3% | 100% | 83.3% | 100% | 68.4% | |||
| 2015 | U Acc. | 93.3% | 93.3% | 93.3% | 100% | 80.0% | 93.3% | 80.0% | 90.5% | 0.889 |
| P Acc. | 87.5% | 87.5% | 77.8% | 100% | 100% | 100% | 85.7% |
| 2016 | 2036 | |||||
|---|---|---|---|---|---|---|
| Main Watersheds | Gas * | % GA | Acres of GI † | Ratio-GI Acres:GAs | GAs | Acres of GI |
| Darby-Cobb | 36 | 4.3% | 7.571 | 0.210 | 411.355 | 86.515 |
| Delaware Direct | 334 | 39.9% | 123.701 | 0.370 | 3816.459 | 1413.467 |
| Schuylkill River | 306 | 36.6% | 130.426 | 0.426 | 3496.516 | 1490.314 |
| Tacony-Frankford | 162 | 19.4% | 41.374 | 0.255 | 1851.097 | 472.755 |
| Total | 837 | 100% | 303.071 | 0.362 | 9564.000 * | 3463.051 |
| Smaller Watersheds | Rate of Change (acres/yr) † | |||||
| Pennypack Creek | 33.396 | 1.411 | 53.710 | |||
| Poquessing Creek | 18.881 | 0.787 | 30.536 | |||
| Wissahickon Creek | 22.846 | 0.931 | 35.202 | |||
| Metric | Description | Unit | Range |
|---|---|---|---|
| Largest Patch Index (LPI) | The area of the largest patch of the corresponding patch type divided by total area of the measured class. | % | 0 < LPI ≤ 100 |
| Mean Patch Size (MPS) | Average patch size. | m2 | MPS > 0, no limit |
| Number of Patches (NP) | Number of patches in the landscape. | N/A | NP ≥ 0, no limit |
| Patch Cohesion Index (PCI) | The physical connectedness of the corresponding patch type. PCI approaches 0 as the proportion of the landscape comprised of the focal class decreases and becomes increasingly subdivided and less physically connected, and vice versa. | Dimensionless | 0 < PCI < 100 |
| Shannon’s Diversity Index (SHDI) | Relationship between the number of classes, the total number of patches, and the relative abundance of patches in each class. It has a value of 0 when no diversity is present and increases as the landscape becomes more fragmented. | Dimensionless | SHDI ≥ 0, without limit |
| 2015 LULC | 2015 GI | |
|---|---|---|
| Kno | 80.1% | 99.8% |
| Klocation | 78.3% | 99.7% |
| Kstandard | 69.4% | 99.7% |
| Disagree Grid Cell | 1.11 × 10−1 | 1.30 × 10−3 |
| Disagree Quantity | 6.58 × 10−2 | 0.00 |
| SHDI | NP | MPS | LPI | PCI | |
|---|---|---|---|---|---|
| 2008 | |||||
| Landscape | 1.736 | 99.947 | |||
| Green Space | 265,562 | 585.994 | 2.039 | 99.246 | |
| Urban | 168,661 | 1135.090 | 18.383 | 99.985 | |
| 2015 | |||||
| Landscape | 1.820 | 99.945 | |||
| Green Space | 2,373,040 | 55.795 | 0.612 | 97.803 | |
| Urban | 514,426 | 19.739 | 20.051 | 99.986 | |
| 2036 | |||||
| Landscape | 1.709 | 99.957 | |||
| Green Space | 1,452,070 | 56.819 | 0.433 | 95.223 | |
| Urban | 324,990 | 802.67 | 24.537 | 99.992 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shade, C.; Kremer, P. Predicting Land Use Changes in Philadelphia Following Green Infrastructure Policies. Land 2019, 8, 28. https://doi.org/10.3390/land8020028
Shade C, Kremer P. Predicting Land Use Changes in Philadelphia Following Green Infrastructure Policies. Land. 2019; 8(2):28. https://doi.org/10.3390/land8020028
Chicago/Turabian StyleShade, Charlotte, and Peleg Kremer. 2019. "Predicting Land Use Changes in Philadelphia Following Green Infrastructure Policies" Land 8, no. 2: 28. https://doi.org/10.3390/land8020028
APA StyleShade, C., & Kremer, P. (2019). Predicting Land Use Changes in Philadelphia Following Green Infrastructure Policies. Land, 8(2), 28. https://doi.org/10.3390/land8020028