1. Introduction
Savanna landscapes, as environments with the coexistence of grass, trees, and shrubs, are natural systems with strong resilience to natural disturbances such as fire, elephants, and other herbivores [
1,
2,
3]. These bi-stable systems are important in regard to socio-economic and ecological questions [
4,
5] in a wide range of tropical and temperate regions.
South African savannas, with their unique and diverse flora, are characteristic in rural areas and millions of people benefit both directly and indirectly from these natural resources [
6,
7].
One of the most frequented ecosystem services is the provisioning of wood, e.g., for fuelwood, construction materials, medical issues, and livestock forage [
6]. Fuelwood, such as firewood or charcoal, is the most rural energy source in sub-Sahara Africa [
8]. For savanna trees and shrubs, firewood collection is sustainable when the collected material is already dead or the collection rates are below the regeneration rates [
6].
To manage sustainable use, traditional authorities regulate firewood collection [
7]. However, increasing settlement [
9], population growth, and a decline of natural resources [
10] apply pressure to the social-ecological system. Additionally, changes of land use in community areas, such as a mixture of various human activities [
11,
12] and climate change, contribute to a more unsustainable use of this energy source. Extensive clearing of trees for cooking fuel [
13], agricultural expansion, and charcoal production are destroying or at least fragmenting these landscapes [
6,
14]. This increasing need and unstainable use of firewood collection requires an adaptation in the firewood collection behavior. Covering those management questions in large scale simulation studies, human behavior and decision-making is a known challenge [
15].
Agent-based modeling (ABM) has a well-proven record on social-ecological systems [
15,
16,
17,
18,
19]. Unfortunately, in most cases, these models are strictly fixed rule-based [
20] and therefore, are not able to represent a realistic picture of the adaptive behavior under changing conditions.
Goal-oriented action planning (GOAP) is an artificial intelligence-based approach to overcome this obstacle [
21,
22,
23]. It is widely used in game development, but we are not aware of an application to social-ecological modeling.
The authors of this study designed the firewood collection process as a goal-oriented action planning (GOAP) behavior [
24] and developed a model for firewood collection in South African savanna landscape communities for this study.
2. Materials and Methods
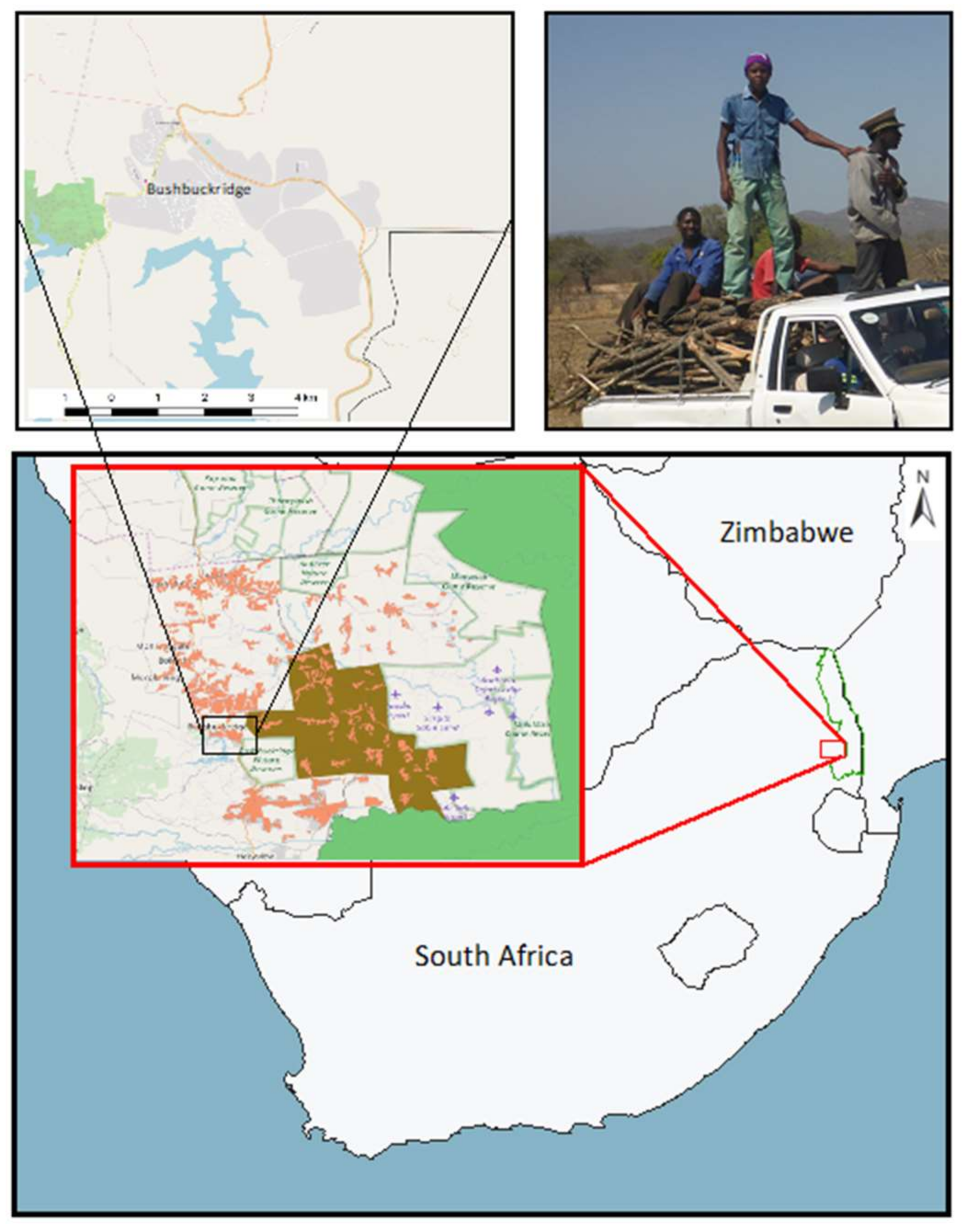
2.1. Study Side
The Bushbuckridge district is in north-eastern South Africa next to the Kruger National Park (
Figure 1).
Many studies about firewood collection and savanna ecosystems were conducted in the Bushbuckridge area [
8,
9,
25,
26,
27,
28,
29,
30,
31,
32,
33,
34], which is also a part of the Kruger to Canyon (K2C) Biosphere Region [
9,
31,
32]. The availability of excellent prior knowledge and existing long-term data make Bushbuckridge a prime geographical region for social-ecological simulation models.
In this marginalized region, the population density is around 150–350 people per km
2; unemployment is common, and the monetary income per household is low [
27]. Village residents use the communal land for cultivation, grazing, and wood harvesting [
35]. Using these ecosystem services is essential to rural communities [
27]. The vegetation is Mixed Lowveld Bushveld with some dominant trees species like
Acacia spp.,
Combretum apiculatum, Terminalia sericea, and
Sclerocarya birrea [
26,
27,
36,
37].
2.2. Data
In South Africa, firewood collection is mostly carried out by females and can take up to two hours daily to collect enough wood, especially in rural areas [
38]. The social regulation for firewood collection is traditionally done by local authorities [
7]. Collecting wood is free of charge [
39] and is used for cooking, heating water, and keeping warm [
25]. Even with increasing electrification, firewood collection is done for cost saving and may increase levels of unsustainable wood harvesting [
8,
33]. Some households are able to buy firewood from local vendors [
25].
Based on the information from previous studies, we summarized some key factors in
Table 1. These values will later be used to parameterize our model.
2.3. Multi-Agent Modeling and Simulation and MARS
Agent-based modeling incorporates artificial intelligence (AI) into modeling and simulation. Individual entities (“agents”) interact with each other and their surroundings [
42], e.g., an agent who is cutting down a tree interacts directly with this specific tree agent located at a geographical position. Their behavior is described on an individual level following a set of rules. It should be noted that agents can be individuals but also social groups, communities, or other entities that act and react to outer conditions [
43]. These actions and reactions on an individual level may lead to a higher state of complexity, i.e., self-organization and emergence [
44], which makes this approach especially suitable for research on social science [
45].
The multi-agent framework MARS (Multi-Agent Research and Simulation) is under development at the University of Applied Sciences Hamburg [
46] and incorporates the newest concepts of both agent-based modeling and simulation. The frameworks target both simple and complex models by using specifically designed approaches tailored to the respective disciplines such as socio-ecological systems [
47,
48].
2.4. Goal-Oriented Action Planning (GOAP)
Human behavior could be described as a sequence of decisions. Goal-oriented action planning (GOAP) derives from the field of AI and integrates adaptive decision-making into multi-agent models. Based on STRIPS (Stanford Research Institute Problem Solver), this planning algorithm aims to reach goals by executing a set of actions [
49]. Each agent keeps an inner state which is represented by a set of properties (attributes). These properties are often described as Boolean predicates that evaluate to either true or false, respectively. These properties change over time and are influenced by the inner or outer sensations of the agent.
A “goal” can be described as a desired state to be reached. A hungry agent, i.e., the “IsHungry” predicate results in true (“IsHungry = true”), might follow his individual goal to change his internal state to “IsHungry = false”.
Moving from one state to another is usually done by executing (“firing”) a sequence of “actions”. Before the “actions” are fired, a plan must be implemented to find the best sequence of actions to reach the goal [
50]. Each action contains a list of preconditions that need to be fulfilled before being executed, as well as a set of postconditions that are valid after successful execution. Additionally, an action might hold a “cost” value, indicating the necessary effort for a successful execution.
The planning algorithm calculates a way of minimal costs to reach the goal. We will show that this decision-making architecture allows the agents to adapt their behavior in correspondence to a changing environment [
19].
In general, GOAP would not need a software realization to work. The planning process could also be done on a sheet of paper and with a pen. If hundreds or thousands of humans are considered this task will become very time-consuming.
For this study, the MARS framework was technically extended by GOAP planning algorithms. That allows any MARS software agent to decide individually on base of an adaptive schedule.
2.4.1. State Model
The “state model” represents the individuality and personality of an agent. For example, an agent “Firewood Collector” may have a personal schedule, an individual set of experiences, personal traits, e.g., civil obedience, access to skills and equipment, living standards, or others.
By utilizing GOAP, each agent can plan his/her own sequence of actions as needed in order to reach a personal goal. Basically, these goals are represented by a set of values within the state model that should be achieved in the near future. The actual sequence of actions to reach that specific goal depends on the goal itself, the current state of the whole system (=world), and the individual state of the agent. Obviously, this means that even in the case of two agents sharing the same goal, their preferred sequence of actions to fulfill that goal might be without any overlap.
2.4.2. Planning
Planning is the process of thinking about the activities required to achieve a desired goal, often by considering constraints such as minimizing costs. If a cost value, e.g., the energy needed to execute an action, is assigned to each action, a sequence of actions will lead to total cost statement. By utilizing constraints, such as reducing total costs to a minimum value, the outcome of the planning process can be significantly changed. This can also be done on an individual level, i.e., different human agents may have individual planning constraints related to their personality or availability of resources.
The result of the planning process is a sequence of actions that transform the current state model of an agent into the desired state formulated by the goal description. So far, GOAP planning is not too dissimilar from other planning algorithms. The major advantage might become visible when considering a change of the environment, the social network of the agent, or within the agent himself during performing this transformation. As an example, the reader might think of driving to a location, e.g., a workplace or a supermarket, when an unexpected phone call suddenly interrupts the originally planned process. A change in the form described above would lead to a re-planning process in GOAP.
2.4.3. Actions
An action is something that the agent is able to do, bracketed by pre- and postconditions. A precondition is a condition or predicate applied to a set of state variables that must always be true just prior to the execution of an action. Analogously, a postcondition is a condition or predicate that must be true after the execution. By that, each action changes a part of a state model, either of the world or an individual agent.
Generally, to reach a goal, a sequence of actions is necessary. Every action is encapsulated and has no immediate impact on other actions. In some cases, actions must fulfill certain criteria to determine whether they can be run. For instance, if “CuttingFirewood” has the precondition “NeedAxe”, that will require a search of the immediate vicinity to see if there is an axe the agent can use. Thus, an action can trigger other actions (sub-processes) before again returning to the primary sequence.
3. Results
In this study, we aimed to describe the behavior of firewood collection under various changing conditions in Bushbuckridge, South Africa by using an agent-based simulation model incorporating GOAP planning. We combined existing data and knowledge of firewood collection behavior (see
Table 1) and transformed this into a goal-oriented model.
The model itself is simplified in order to show that this way of modeling is suitable to express adaptive behavior under changing conditions.
3.1. Conceptual Model
The conceptual model is the first step in creating an agent-based model [
51]. It describes, in a simple but not overly simplistic way [
52], the complexity of a subset of the real world in a model. During the conceptual modeling process, modelers have to decide which subset of all concepts have to be included—and which do not. Obviously, this selection must be aligned with a specific research or management question.
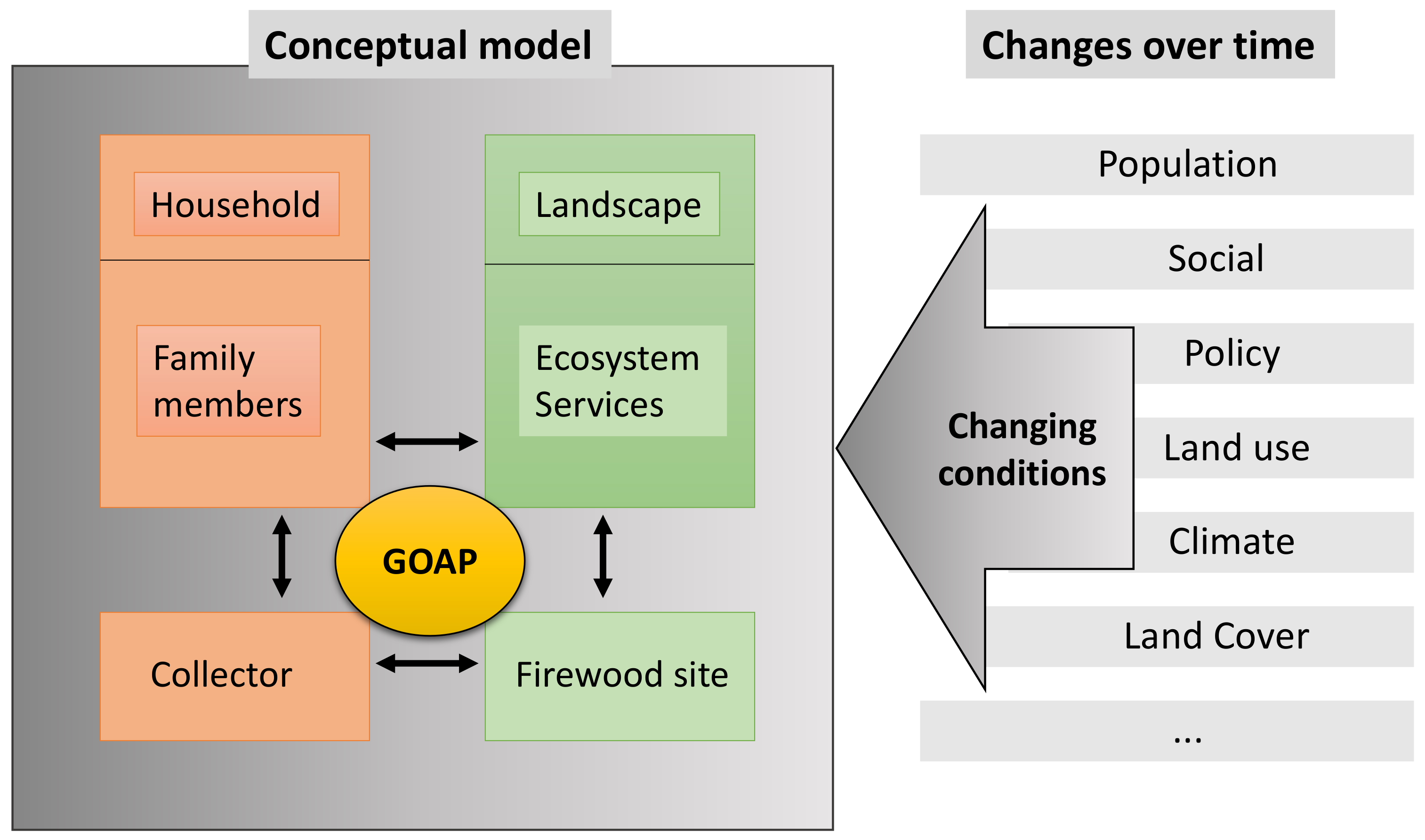
In this paper, the conceptual model (see
Figure 2) combines four different key elements for firewood collection. The selected components are
Household,
Collector, the
Landscape, and
Firewood site. A household aggregates one or more
Family members. If the household needs firewood, one of the family members becomes a collector. The collector has to bring firewood to the household. The
Landscape component provides several
Ecosystem Services. One of them, firewood provisioning, is represented by a
Firewood site. Collectors are able to interact with this service.
Figure 2 also shows constraints that might change over time. The steady growth of the human population certainly changes firewood collection behavior. Changes may also arise from social or political processes, land use, climate changes, or other processes.
Therefore, the interaction between the conceptual components shown in
Figure 2 needs an adaptive part. This is implemented by incorporating GOAP planning.
3.2. Domain Model
Following an initial conceptual model (
Figure 2), the next step is to build the domain model. For agent-based models, this means defining the agents and the environment. An agent is typically represented by attributes and methods. Here, we limit ourselves to highlighting the interaction between the firewood collector as an agent and the firewood site as part of our environment.
The agent type collector has a list of attributes such as age, gender, health condition, wood carrying capacity, and personal time schedule, among others. The combination of attributes always depends on the exact research question. As a result, for this showcase, all of our agents are without personal settings and are all able to walk, drive a car, take an axe, and collect and cut firewood. At the same time, they have the same knowledge about the firewood sites and are able to go back to their home.
For the goal-oriented action planning, in this approach, the collector agents plan their sequences of actions to bring firewood to their home. Each particular sequence of actions not only depends on the goal, but also on the different state variables of the agents and the world.
The environment here is the landscape defined by its geographical coordinates, spatial extent, and its biological diversity; it also provides several ecosystem services, e.g., firewood. In MARS scenarios, this environment is modeled by GIS files where firewood collection sites are marked points-of-interest (POI).
3.3. Scenarios
Simulation scenarios are a well-established approach to become aware of future challenges or changes in complex adaptive systems. For this study, the domain model described above was implemented in the MARS framework. In order to define relevant scenarios, we included possible changes over time, which actuate the system (
Table 2).
For firewood collection, there are several changing conditions coupled with a number of consequences of interest. Changes could be in e.g., population, the social system, policy, land use, climate, and land cover.
With regard to the system considered in this study, this list of potential changes is certainly not comprehensive. However, the broad range of aspects and their importance should be visible.
3.4. GOAP
As stated above, a GOAP-based planning algorithm should make firewood collectors (agents) capable of reacting to changes in their individual, social and environmental contexts. In the first step, we enhance the state model of firewood collector agents by predicates to allow the evaluation of pre- and postconditions.
3.4.1. Firewood Collector
By analyzing the firewood collection process, we identified several aspects that have a vital impact on the individual behavior of collectors. The resulting list is shown in
Table 3. Obviously, the availability of time, money, and the set of tools, e.g., axes, are important factors, but respect and obedience in social hierarchical groups are also of importance.
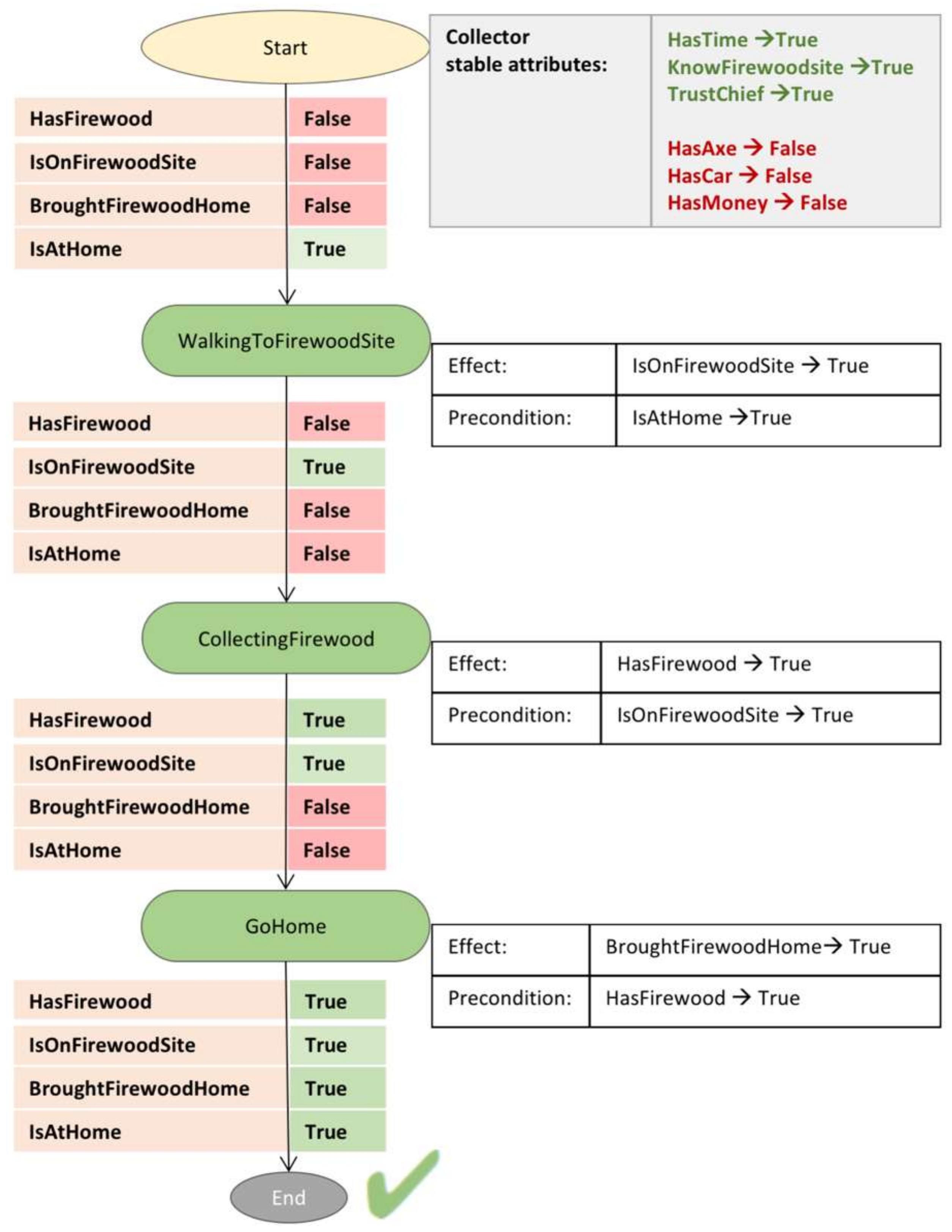
“Personal collection conditions” reflect the current situation of an agent in a set of logical values.
Applying the GOAP planning algorithm to a firewood collector who has no money, no car, and no axe available achieves the action plan from
Figure 3. Each action (green ellipse) is triggered by the set of preconditions and affects several state variables, as described in the “Effect” element.
Figure 3 shows the “Happy Path”, a basic action plan that does not consider problems or changes: simply walking to a firewood collection site, harvesting wood, and walking back home.
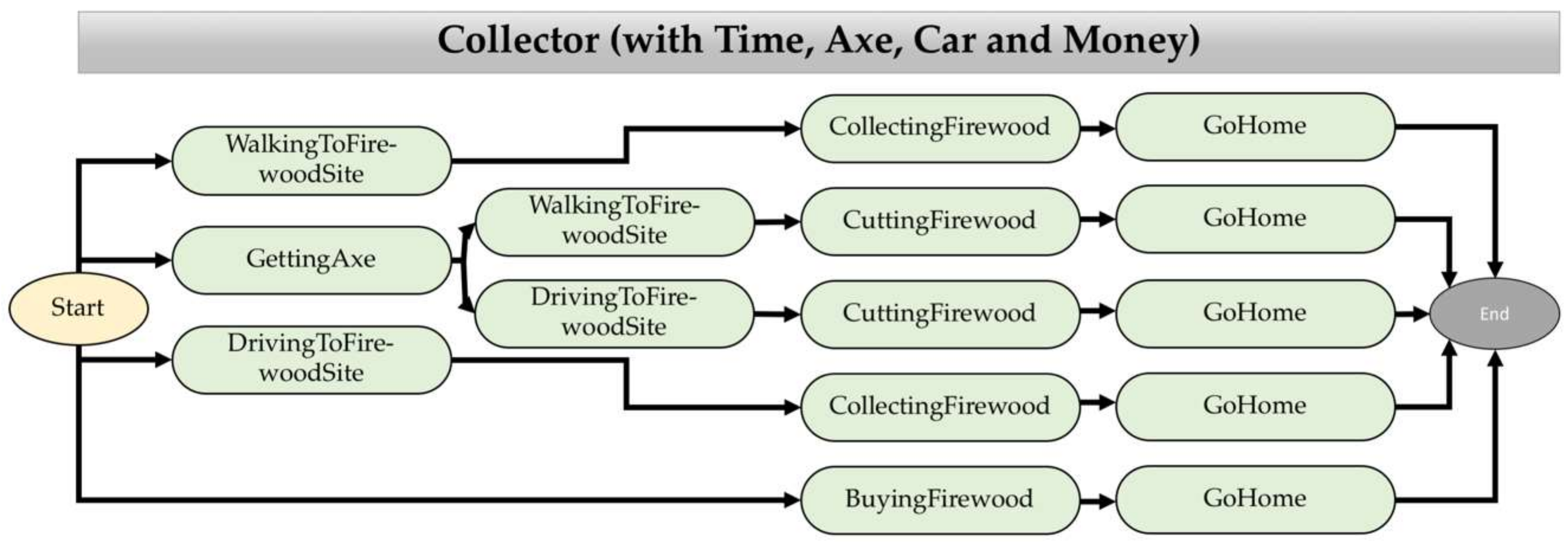
However, in a non-uniform world, resources and skills are not equally distributed. That leads to different methods to acquire firewood for the household.
Figure 4 shows five different action plans for firewood acquisition under variable circumstances.
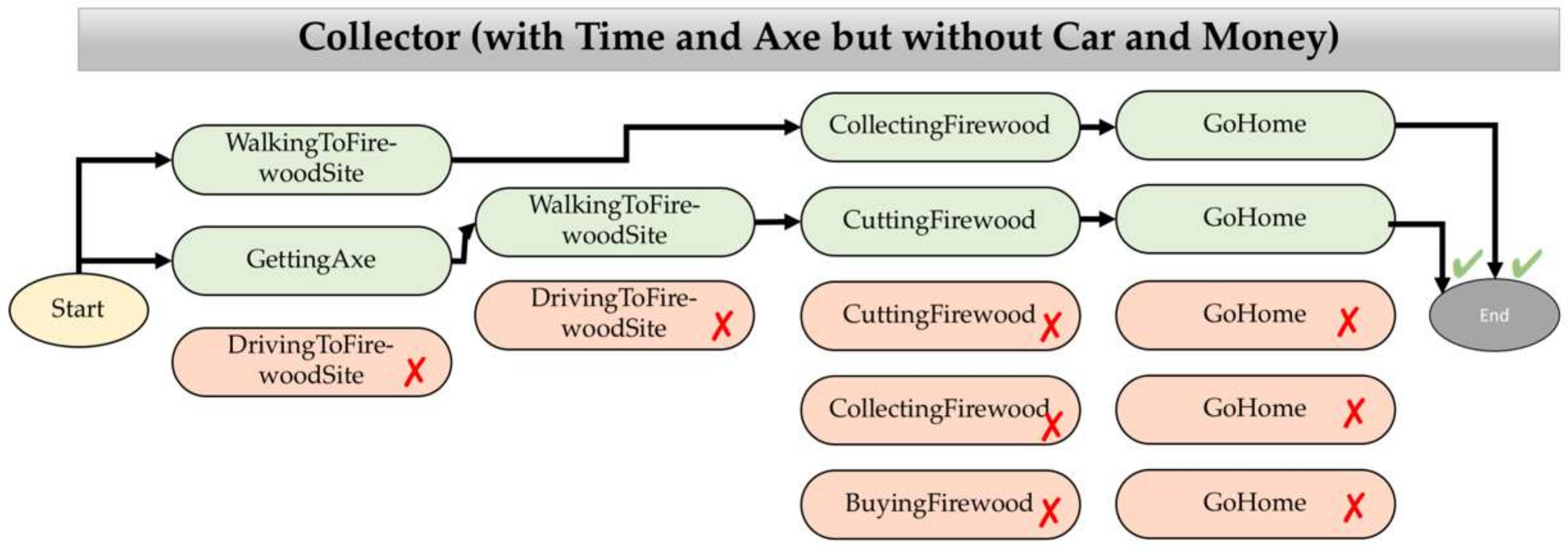
If the setting of the agent is different, e.g., the collector has no car and no money, there are fewer successful ways to fulfill the goal “
HasFirewood =
true” (see
Figure 5).
GOAP is a complex algorithm to calculate the various ways to fulfill a goal by taking different steps, i.e., actions. It also offers optimization criteria, for example, to find the least time consuming one. If there are more than one “optimal” action plans resulting from the GOAP planning, a random or rule-based selection can be done.
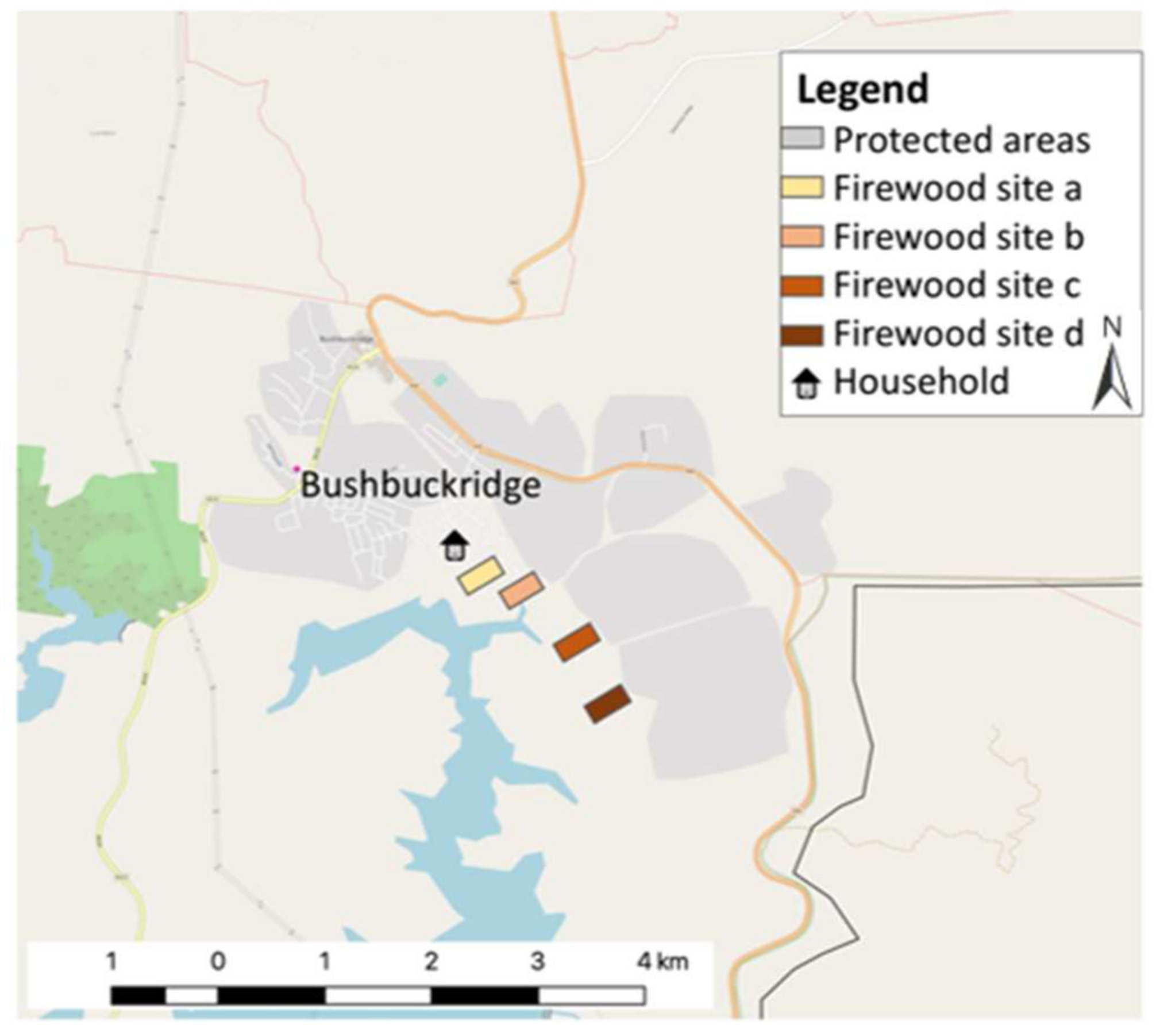
3.4.2. Firewood Sites
In most regions of South Africa, firewood collection takes place on official firewood sites [
25]. Because the actual location of true sites is not important for this study, we placed four fictive sites (a, b, c, and d) with different attributes (see
Table 4) into the landscape around Bushbuckridge (see
Figure 6 for map).
For the initial step of this study, we presumed that the sites are without any limitation on firewood. The three collecting sites (b), (c), and (d) are not only reachable by walking, but also by driving. Distance and time are important factors for calculating costs in this case.
3.5. Experiments
The preliminaries above were used to define more complex and integrated scenarios. The first experiment varied capabilities and resources of firewood collectors; the second, environmental factors; and the third, a combination of both.
3.5.1. Agents—By Changing Attributes of Collectors
Obviously, the most preferred site is site (a), which is both easy to reach and has plentiful collectable firewood.
We designed three different types of collector agents to represent three categories of human firewood collectors:
- I
Presents a collector with unlimited time but without any equipment. This type could represent a child, for example.
- II
Marks a stereotype for a collector which has only a maximum three-hour time limit, access to a car, and no civil obedience. Which could e.g., stand for a young man within a group who collects firewood by car.
- III
In this type, the collector has a higher living standard but only three hours of time.
The result of the planning process is shown in the last row of
Table 5. Only type III displays deviant behavior. Which action plan is executed depends on optimization constraints, e.g., costs or time consumption.
By considering only this setup, a high risk of overharvesting site (a) becomes obvious.
3.5.2. Environment—By Changing Attributes of Firewood Sites
After creating different collector types, we designed three different settings (A, B, C) for our four firewood sites (a, b, c, d), each representing a different state of over-harvesting (see
Table 6).
- A
Is a direct result after unlimited firewood collection. All dead wood on site (a) is gone, but there is living wood to cut on site (a). All other sites are still provided with dead and living firewood.
- B
There is no more firewood on site (a), (b), and (c), which are reachable within three hours. However, there is still both dead and living firewood on site (d).
- C
Here, we designed the opposite of unlimited firewood; there is no legal firewood on any of our four sites.
After designing three different collector types and three different firewood site scenarios (see
Table 5 and
Table 6), we combined them to have a total of nine different scenario outputs (see
Table 7).
Even this basic scenario setting produced a variety of different strategies:
A/I: When there is no more dead firewood on site (a), the collector without an axe (I) has to walk a longer distance to collect firewood on site (b).
A/II: If the collector has an axe but no car (II), he still can cut firewood on site a or walk to site (b) to collect there, like collector type I.
A/III: A well-situated collector (III) can buy firewood, or if he has time drive to site (b), he may collect there.
For scenario B, time is a critical attribute. The only site with firewood to collect or to cut needs more than three hours to complete the goal.
B/I: The collector I has time and is therefore able to walk the longer distance to reach site (d) and collect there.
B/II: This collector type has only three hours to bring firewood to the household, but has access to a car and can drive to site (d) to collect there.
B/III: Because of time limitations, collector III has to buy firewood.
C/I and C/II: If there is no more firewood available (C), there is no plan possible for collector I and II.
C/III: Collector III can reach the goal by buying firewood.
By modeling with GOAP, it is plausible in this instance that there is no plan to fulfill the actual goal. However, this is not a dead end for the model; on the contrary, it serves as a way to find new solutions and to model adaptable behavior.
In this experiment, two cases did not result in a suitable sequence of actions to meet the demand. This may lead to “cascading” the problem back to the delegating entity:
- C/I
For collector I, there is no chance to fulfill the goal. Therefore, after the planning, no actions are executed. The design of the model must be able to account for this. Perhaps there are alternatives in the household level.
- C/II
Like collector I, collector II has no chance to bring back firewood to the household. Because of his lack of civil obedience, he may be able to change his behavior, e.g., by collecting firewood outside official sites. Even if it is not currently implemented in this model, the outcome shows the modeler that something is happening, and that the model needs an improvement for this scenario.
There are also visible results at the landscape scale. The modeling is about different behaviors and adaptive decision making by people, but the results can change the landscape view; in this case, the different firewood places. Questions to be answered could be:
For the first attempt, there is enough firewood on each collection side, so only the expenditure of reaching the area and collecting brings the decision which collecting place is best. This will be completely different when places nearby have no more firewood available. Here we are able to define a tipping point for overharvesting. If the firewood collectors need more time, money, or a vehicle, it causes changes in behavior between households with different social-economical standards.
This modeling approach also opens up options for new perspectives; for example, what happens if the collector type P gets access to electricity and an electric stove. Certainly, this will change the individual firewood collection behavior, but the question remains about how this will impact the entire system.
4. Discussion
Overharvesting and unstainable fuelwood extraction are contributors for land use and land cover changes (LUCC) causing a significant impact on the overall savanna ecosystem [
8,
9,
29,
54,
56].
The aim of this paper was to show the capabilities of modeling adaptive human behavior under changing conditions with GOAP.
Starting with a very simple initial approach and unlimited resources, we showed that the firewood collector always collects firewood in a way that requires the least effort. In our experiments, this means collecting dead wood from the nearest firewood site or, if possible, buying firewood. By increasing the options and limitations, different collector stereotypes developed varying strategies for acquiring firewood. Other modeling approaches do not support this adaptation of social-ecological behaviors [
57,
58,
59].
In some cases, it became quite obvious that no suitable planning was possible. This might indicate a gap in the model description, but could also point to a possible conflict in the real world.
Moreover, our modeling approach focuses predominantly on the landscape level. Overharvesting of firewood sites, tipping points for illegal harvesting, landscape fragmentation, and the need for alternatives are important topics in modeling savanna ecology [
9,
29]. The complexity of ecosystems requires not only rule-based models [
19,
58,
59], but also adaptive agent-based models.
We found that individual firewood collecting behavior could be modeled in an acceptable manner with GOAP. The resulting behavioral patterns fit our own observations and published results. We showed using a basic example of overharvesting, that the behavior of agents has direct consequences at the landscape level. Even the synthesized model shows this cross-scale impact well.
We observed that defining costs and thresholds using a single rating system that combines monetary values, elapsed time, and performed activities is a challenge. This subjective task should be carried out by experts, a conclusion supported by the literature [
6,
33,
34,
39,
60,
61]. In the near future, we intend enhancing and up-scaling the model by incorporating specific local conditions from Bushbuckridge, e.g., number of households and availability of firewood collection sites, together with limitations regarding more specific firewood quantities and different qualities for each firewood site [
33,
62]. Some of the extensions for achieving a more realistic model are:
Collector: consider the effect of gender and age on different collection behaviors and distances covered; also incorporate fear of walking through potentially dangerous areas;
Household: differentiate households based on different amounts of firewood needed, availability of electricity, income levels, and the number of household members;
Landscape: include illegal firewood sites and locations of alternative energy sources, like dung;
Firewood site: distinguish between different qualities of firewood.
However, it is expected that the greatest increase in knowledge will result from the massive up-scaling, i.e., by increasing the number of households and collectors competing for firewood in a region. What will happen if all accessible collection sites are overharvested or if, due to climate change, there is a shift in tree and bush species? Exploring these scenarios will include thousands, perhaps millions, of individuals with high variability in intentions, goals and capabilities.
Dealing with the increasing complexity requires sophisticated and cross-scale simulation models. Only then can decision-makers and on-the-ground managers be better supported by scientists. The adaptive manner of this modeling approach also allows system experts to gain a better mechanistic understanding of the specific social-ecological system. Emerging behavior, and patterns of self-organization are worthwhile properties to look for as well as tipping-points in the system.
5. Conclusions
The understanding of human–nature interaction is an important step for achieving sustainable management solutions in the context of social-ecological systems.
Management decisions are often achieved by personal experiences, abilities, and within hierarchical structures. Under changing conditions, such as climate and an increasing population, the decision-making process becomes more complex. These experiences bring a high risk of ecological and social degradations.
For decision makers it is predictable that, each single household will exploit the closest firewood site and travel further when the closest sites are exhausted. Consequently, the knowledge growth will come when the upscaling for hundreds, thousands, or millions of households is observed.
The MARS framework is exactly developed for these massive number of individual agents in highly complex social-ecological systems. To understand the processes that lead to emerging phenomena, tipping points, or self-organization decision makers need such powerful frameworks.
Because of the higher demand and the potential loss of all ecosystem services, there is a high demand for suitable modeling approaches that carter for solutions for the worldwide problems.
The presented approach for adaptive planning of human behavior in agent-based modeling and simulation scenarios based on artificial intelligence are practical for all kinds of social-ecological modeling—especially, for limited natural resources like water, food, and fuel wood.
These promising results will lead to an expansion of the model in the near future.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}