
Unmanned Aerial Vehicles Applicability to Mapping Soil Properties Under Homogeneous Steppe Vegetation

 ,
,  , , , , and
, , , , and
Abstract
1. Introduction
2. Materials and Methods
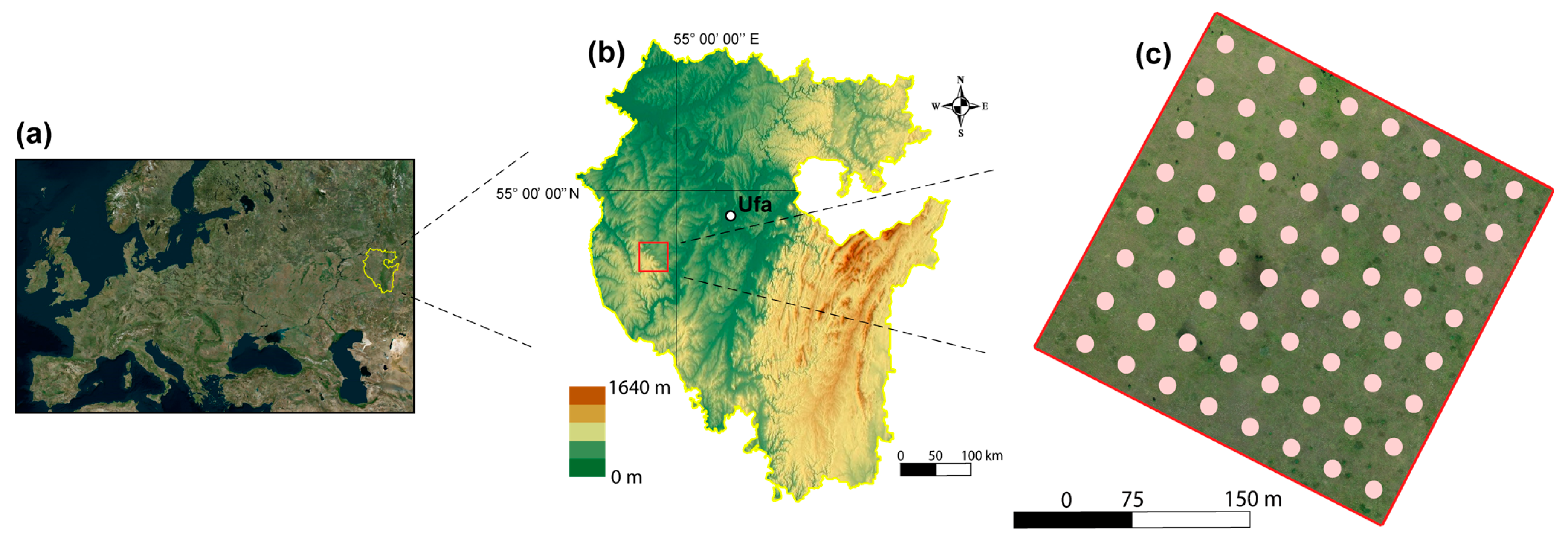
2.1. Study Area
2.2. Soil Characteristic, Sampling, and Laboratory Analysis
2.3. Unmanned Aerial Vehicle Imaging
2.4. Environmental Variables

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Covariate Type | Name | Abbreviation | Details | Reference |
|---|---|---|---|---|
| Organisms | Red | R | RGB red band | Our source |
| Organisms | Green | G | RGB green band | Our source |
| Organisms | Blue | B | RGB blue band | Our source |
| Organisms | Normalized red | Rn | R/(R + G + B) | Kawashima et al. [32] |
| Organisms | Normalized green | Gn | G/(R + G + B) | Kawashima et al. [32] |
| Organisms | Normalized blue | Rn | B/(R + G + B) | Kawashima et al. [32] |
| Organisms | Brightness index | BI | sqrt [(R2 + G2 + B2)/3] | Levin et al. [33] |
| Organisms | Coloration index | CI | (R − G)/(R + G) | Levin et al. [33] |
| Organisms | Hue index | HI | (2 × R − G − B)/(G − B) | Levin et al. [33] |
| Organisms | Green red difference index | GRDI | (G − R)/(G + R) | Tucker [34] |
| Organisms | Saturation index | SI | (R − B)/(R+ B) | Levin et al. [33] |
| Relief | Digital surface model | dsm | Elevation above sea level | Our source |
| Relief | Slope | Slope | Slopes in degrees | Our source |
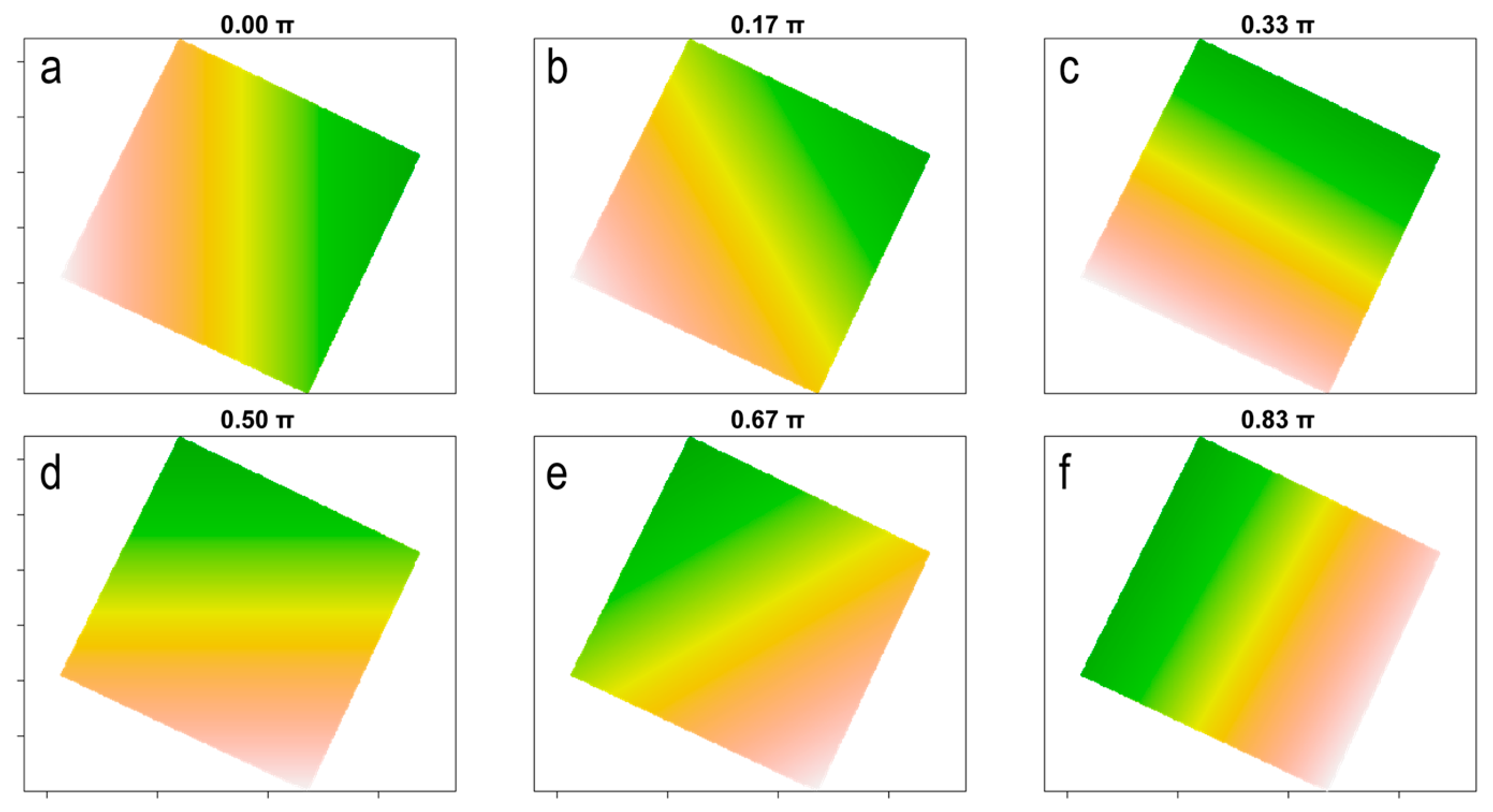
| Position | Oblique geographic coordinates | OGC | Six covariates (π = 0, 0.17, 0.33, 0.5, 0.67, and 0.83) | Møller et al. [24] |
2.5. Digital Mapping Procedure
2.6. Uncertainty Assessment and Model Evaluation
3. Results
3.1. Descriptive Statistics of Soil Properties
3.2. Model Performance of RF Models
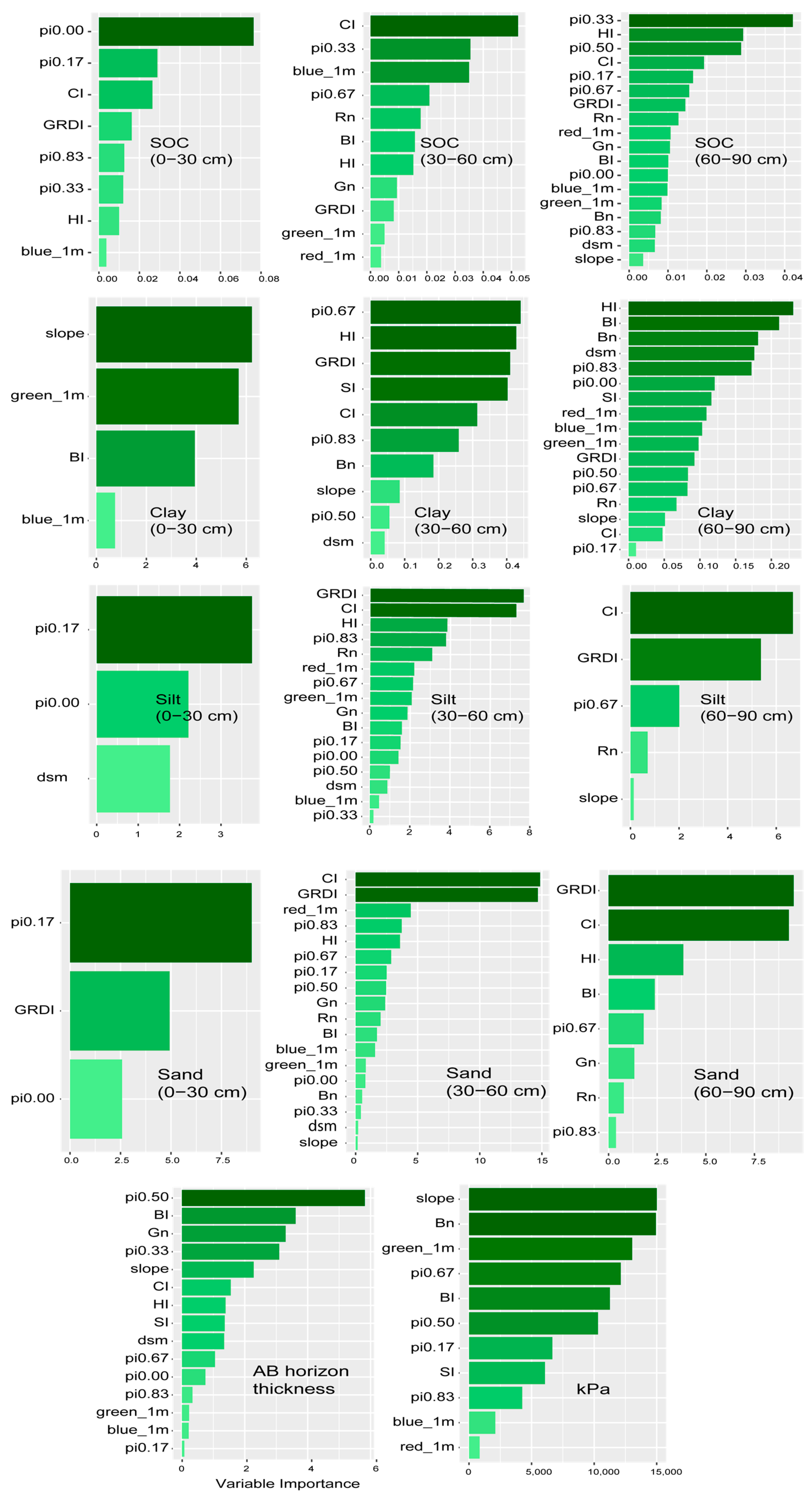
3.3. Variable Importance of Covariates
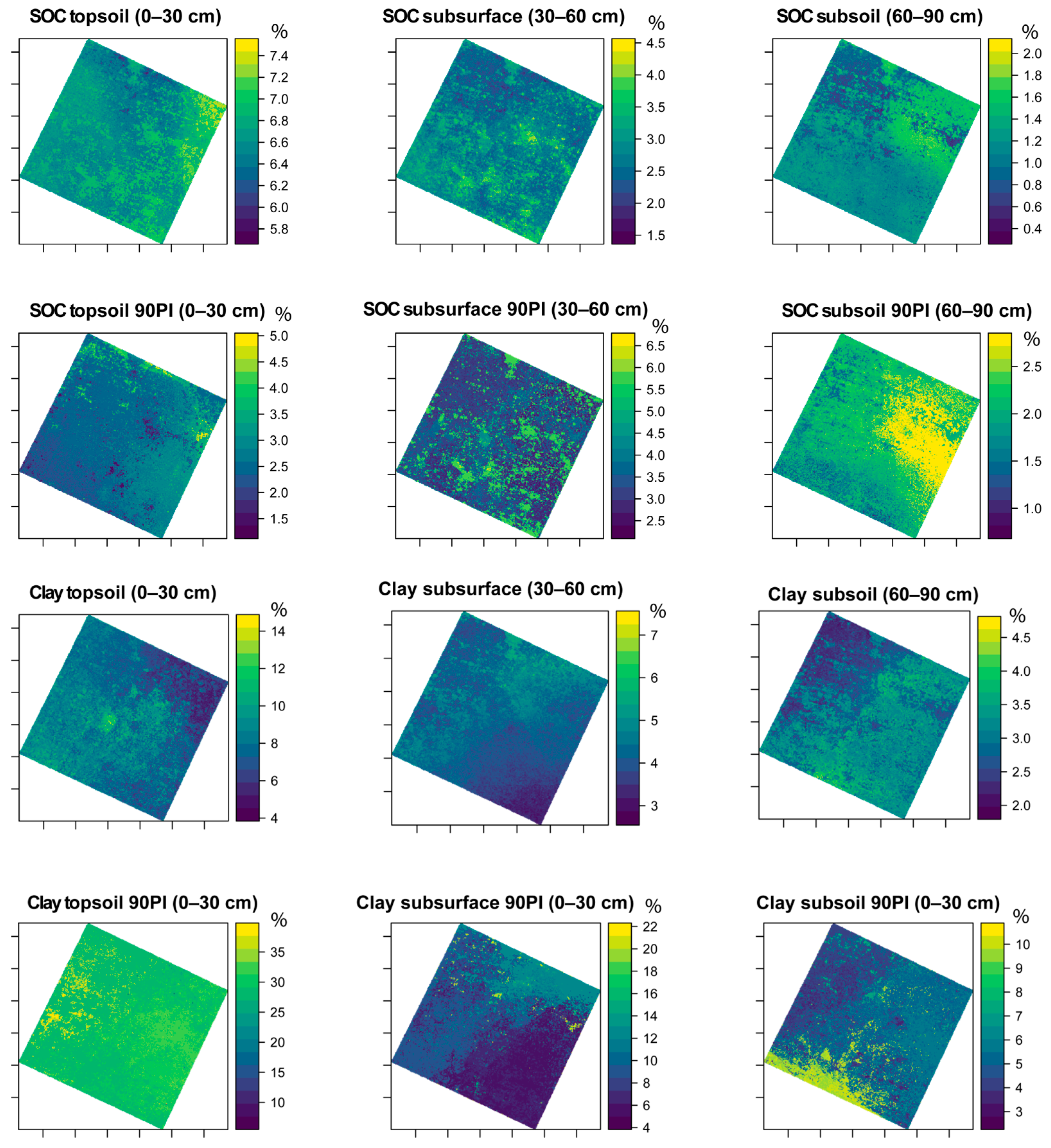
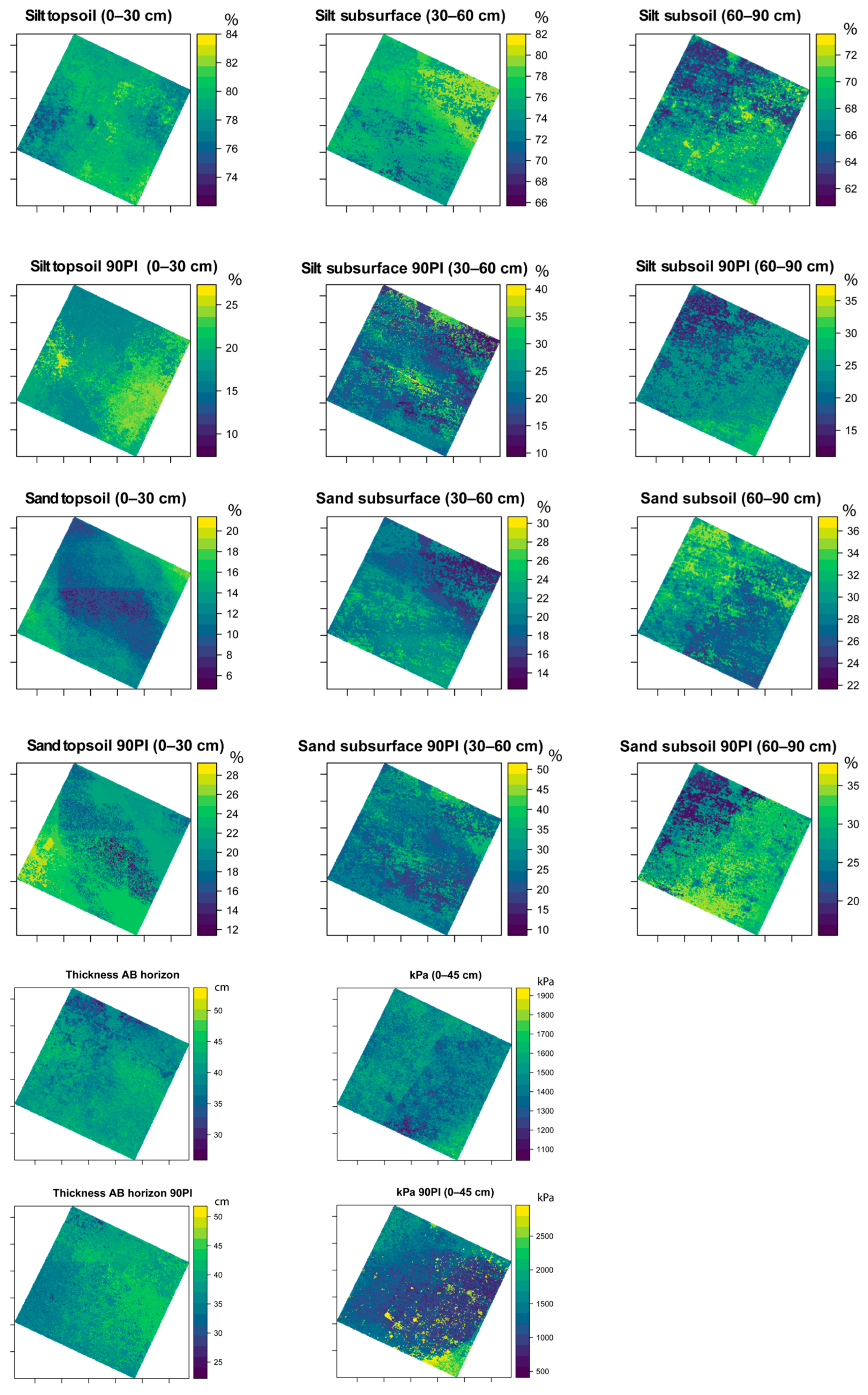
3.4. Spatial Predictions
4. Discussion
4.1. UAV Applicability
4.2. Effect of Adding Spatial Position Variables
4.3. Variation of Soil Properties
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| UAV | Unmanned aerial vehicle |
| SOC | Soil organic carbon |
| OGC | Oblique geographic coordinate |
| DSM | Digital soil mapping |
| RF | Random forest |
| RFE | Recursive feature elimination |
| RMSE | Root mean squared error |
| QRF | Quantile regression forest |
References
- Arrouays, D.; McBratney, A.; Bouma, J.; Libohova, Z.; Richer-de-Forges, A.C.; Morgan, C.L.S.; Roudier, P.; Poggio, L.; Mulder, V.L. Impressions of digital soil maps: The good, the not so good, and making them ever better. Geoderma Reg. 2020, 20, e00255. [Google Scholar] [CrossRef]
- Lozbenev, N.; Komissarov, M.; Zhidkin, A.; Gusarov, A.; Fomicheva, D. Comparative assessment of digital and conventional soil mapping: A case study of the Southern Cis-Ural region, Russia. Soil Syst. 2022, 6, 14. [Google Scholar] [CrossRef]
- McBratney, A.B.; Mendonça Santos, M.L.; Minasny, B. On digital soil mapping. Geoderma 2003, 117, 3–52. [Google Scholar] [CrossRef]
- Mulder, V.L.; de Bruin, S.; Schaepman, M.E.; Mayr, T.R. The use of remote sensing in soil and terrain mapping—A review. Geoderma 2011, 162, 1–19. [Google Scholar] [CrossRef]
- Biney, J.K.M.; Houška, J.; Volánek, J.; Abebrese, D.K.; Cervenka, J. Examining the influence of bare soil UAV imagery combined with auxiliary datasets to estimate and map soil organic carbon distribution in an erosion-prone agricultural field. Sci. Total Environ. 2023, 870, 161973. [Google Scholar] [CrossRef]
- Ding, M.; Li, X.; Jin, Z. Digital mapping of soil organic carbon using UAV images and soil properties in a thermo-erosion gully on the Tibetan Plateau. Remote Sens. 2023, 15, 1628. [Google Scholar] [CrossRef]
- Zhou, J.; Xu, Y.; Gu, X.; Chen, T.; Sun, Q.; Zhang, S.; Pan, Y. High-precision mapping of soil organic matter based on UAV imagery using machine learning algorithms. Drones 2023, 7, 290. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precision Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Aldana-Jague, E.; Heckrath, G.; Macdonald, A.; van Wesemael, B.; Van Oost, K. UAS-based soil carbon mapping using VIS-NIR (480–1000 nm) multi-spectral imaging: Potential and limitations. Geoderma 2016, 275, 55–66. [Google Scholar] [CrossRef]
- Reyes, J.; Wiedemann, W.; Brand, A.; Franke, J.; Ließ, M. Predictive monitoring of soil organic carbon using multispectral UAV imagery: A case study on a long-term experimental field. Spat. Inf. Res. 2024, 32, 683–696. [Google Scholar] [CrossRef]
- Acharya, B.; Dodla, S.; Tubana, B.; Gentimis, T.; Rontani, F.; Adhikari, R.; Duron, D.; Bortolon, G.; Setiyono, T. Characterizing optimum N rate in waterlogged maize (Zea mays L.) with unmanned aerial vehicle (UAV) remote sensing. Agronomy 2025, 15, 434. [Google Scholar] [CrossRef]
- Song, Q.; Gao, X.; Song, Y.; Li, Q.; Chen, Z.; Li, R.; Zhang, H.; Cai, S. Estimation and mapping of soil texture content based on unmanned aerial vehicle hyperspectral imaging. Sci. Rep. 2023, 13, 14097. [Google Scholar] [CrossRef] [PubMed]
- Zeyliger, A.; Chinilin, A.; Ermolaeva, O. Spatial interpolation of gravimetric soil moisture using EM38-mk induction and ensemble machine learning (case study from dry steppe zone in Volgograd region). Sensors 2022, 22, 6153. [Google Scholar] [CrossRef] [PubMed]
- Meinen, B.U.; Robinson, D.T. Agricultural erosion modelling: Evaluating USLE and WEPP field-scale erosion estimates using UAV time-series data. Environ. Model. Softw. 2021, 137, 104962. [Google Scholar] [CrossRef]
- Peter, K.D.; d’Oleire-Oltmanns, S.; Ries, J.B.; Marzolff, I.; Ait Hssaine, A. Soil erosion in gully catchments affected by land-levelling measures in the Souss Basin, Morocco, analysed by rainfall simulation and UAV remote sensing data. Catena 2014, 113, 24–40. [Google Scholar] [CrossRef]
- Gholizadeh, A.; Žižala, D.; Saberioon, M.; Borůvka, L. Soil organic carbon and texture retrieving and mapping using proximal, airborne and Sentinel-2 spectral imaging. Remote Sens. Environ. 2018, 218, 89–103. [Google Scholar] [CrossRef]
- Vodyanitskii, Y.N.; Savichev, A.T. The influence of organic matter on soil color using the regression equations of optical parameters in the system CIE-L* a* b. Ann. Agrar. Sci. 2017, 15, 380–385. [Google Scholar] [CrossRef]
- Nicolas, W.; Cecilia, C.; Hernán, A.; Mercedes, E.; Gastón, L.; Reussi Calvo, N.; Walter, C.; Sainz Rozas, H. The effect of agriculture on topsoil carbon stocks is controlled by land use, climate, and soil properties in the Argentinean Pampas. Catena 2022, 212, 106126. [Google Scholar] [CrossRef]
- Paramesha, V.; Kumar, P.; Francaviglia, R.; Jyoti Nath, A.; Mishra, G.; Mohan Kumar, R.; Toraskar, S.; Rakhunde, S. Evaluating land use and climate change effects on soil organic carbon. A simulation study in coconut and pineapple systems in west coast India. Catena 2025, 248, 108587. [Google Scholar] [CrossRef]
- Heuvelink, G.B.M.; Webster, R. Spatial statistics and soil mapping: A blossoming partnership under pressure. Spat. Stat. 2022, 50, 100639. [Google Scholar] [CrossRef]
- Burgess, T.M.; Webster, R. Optimal interpolation and isarithmic mapping of soil properties: I The semi-variogram and punctual kriging. J. Soil Sci. 1980, 31, 315–331. [Google Scholar] [CrossRef]
- Behrens, T.; Schmidt, K.; Viscarra Rossel, R.; Gries, P.; Scholten, T.; Macmillan, R.A. Spatial modelling with Euclidean distance fields and machine learning. Eur. J. Soil Sci. 2018, 69, 757–770. [Google Scholar] [CrossRef]
- Hengl, T.; Nussbaum, M.; Wright, M.N.; Heuvelink, G.B.M.; Gräler, B. Random forest as a generic framework for predictive modeling of spatial and spatio-temporal variables. PeerJ 2018, 6, e5518. [Google Scholar] [CrossRef]
- Møller, A.B.; Beucher, A.M.; Pouladi, N.; Greve, M.H. Oblique geographic coordinates as covariates for digital soil mapping. SOIL 2020, 6, 269–289. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, Z.; Wang, X.; Shi, Z.; Chen, S. Including soil spatial neighbor information for digital soil mapping. Geoderma 2024, 451, 117072. [Google Scholar] [CrossRef]
- Peel, M.C.; Finlayson, B.L.; McMahon, T.A. Updated world map of the Köppen-Geiger climate classification. Hydrol. Earth Syst. Sci. 2007, 11, 1633–1644. [Google Scholar] [CrossRef]
- Baisheva, E.; Fedorov, N.; Zhigunova, S.N.; Shirokikh, P.; Komissarov, M.; Gabbasova, I.; Muldashev, A.; Bikbaev, I.; Tuktamyshev, I.; Shendel, G.; et al. Productivity of vegetation and carbon stock in meadow steppe on fallow areas in the Bashkir Cis-Urals (Southern Urals region), Russia. South Russ. Ecol. Dev. 2023, 18, 64–73. [Google Scholar] [CrossRef]
- IUSS Working Group WRB. World Reference Base for Soil Resources. In International Soil Classification System for Naming Soils and Creating Legends for Soil Maps, 4th ed.; International Union of Soil Sciences (IUSS): Vienna, Austria, 2022; ISBN 9798986245119. [Google Scholar]
- State Standard of the USSR 26213-91. Soils. Methods for Determination of Organic Matter. 1993. Available online: http://docs.cntd.ru/document/1200023481 (accessed on 21 September 2022).
- Walldey, A.; Black, I.A. Estimation of soil organic carbon by the chromic acid titration method. Soil Sci. 1934, 47, 29–38. [Google Scholar]
- Hijmans, R.J. Terra: Spatial Data Analysis; R Package Version 1.5-21; 2022. Hijmans, R. terra: Spatial Data Analysis. R Package Version 1.8-44. 2025. Available online: https://github.com/rspatial/terra (accessed on 18 March 2025).
- Kawashima, S.; Nakatani, M. An algorithm for estimating chlorophyll content in leaves using a video camera. Ann. Bot. 1998, 81, 49–54. [Google Scholar] [CrossRef]
- Levin, N.; Ben-Dor, E.; Singer, A. A digital camera as a tool to measure colour indices and related properties of sandy soils in semi-arid environments. Int. J. Remote Sens. 2005, 26, 5475–5492. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and Photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Gregorutti, B.; Michel, B.; Saint-Pierre, P. Correlation and variable importance in random forests. Stat. Comput. 2017, 27, 659–678. [Google Scholar] [CrossRef]
- Kuhn, M. Building Predictive models in R using the caret Package. J. Stat. Software 2008, 28, 1–26. [Google Scholar] [CrossRef]
- Meinshausen, N. Quantile regression forests. J. Mach. Learn. Res. 2006, 7, 983–999. [Google Scholar]
- Castaldi, F.; Hueni, A.; Chabrillat, S.; Ward, K.; Buttafuoco, G.; Bomans, B.; Vreys, K.; Brell, M.; van Wesemael, B. Evaluating the capability of the Sentinel 2 data for soil organic carbon prediction in croplands. J. Photogramm. Remote Sens. 2019, 147, 267–282. [Google Scholar] [CrossRef]
- Suleymanov, A.; Suleymanov, R.; Gabbasova, I.; Saifullin, I. Field-scale digital mapping of top- and subsoil Chernozem properties. Precision Agric. 2024, 25, 1636–1657. [Google Scholar] [CrossRef]
- Heil, J.; Jörges, C.; Stumpe, B. Fine-scale mapping of soil organic matter in agricultural soils using UAVs and machine learning. Remote Sens. 2022, 14, 3349. [Google Scholar] [CrossRef]
- Zhang, H.; Shi, P.; Crucil, G.; van Wesemael, B.; Limbourg, Q.; Oost, K.V. Evaluating the capability of a UAV-borne spectrometer for soil organic carbon mapping in bare croplands. Land Degrad. Dev. 2021, 32, 4375–4389. [Google Scholar] [CrossRef]
- Rasel, S.M.M.; Groen, T.A.; Hussin, Y.A.; Diti, I.J. Proxies for soil organic carbon derived from remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2017, 59, 157–166. [Google Scholar] [CrossRef]
- Suleymanov, A.; Abakumov, E.; Alekseev, I.; Nizamutdinov, T. Digital mapping of soil properties in the high latitudes of Russia using sparse data. Geoderma Reg. 2024, 36, e00776. [Google Scholar] [CrossRef]
- Lamichhane, S.; Kumar, L.; Wilson, B. Digital soil mapping algorithms and covariates for soil organic carbon mapping and their implications: A review. Geoderma 2019, 352, 395–413. [Google Scholar] [CrossRef]
- Mahmoudabadi, E.; Karimi, A.; Haghnia, G.H.; Sepehr, A. Digital soil mapping using remote sensing indices, terrain attributes, and vegetation features in the rangelands of Northeastern Iran. Environ. Monit. Assess. 2017, 189, 500. [Google Scholar] [CrossRef] [PubMed]
- Urbina-Salazar, D.; Vaudour, E.; Richer-de-Forges, A.C.; Chen, S.; Martelet, G.; Baghdadi, N.; Arrouays, D. Sentinel-2 and Sentinel-1 bare soil temporal mosaics of 6-Year periods for soil organic carbon content mapping in Central France. Remote Sens. 2023, 15, 2410. [Google Scholar] [CrossRef]
- Chen, S.; Richer-de-Forges, A.C.; Leatitia Mulder, V.; Martelet, G.; Loiseau, T.; Lehmann, S.; Arrouays, D. Digital mapping of the soil thickness of loess deposits over a calcareous bedrock in Central France. Catena 2021, 198, 105062. [Google Scholar] [CrossRef]
- Chen, J.; Xie, E.; Peng, Y.; Yan, G.; Jiang, J.; Hu, W.; Zhao, Y.; Saifullah Khan, K.; Zhao, Y. Four-dimensional modelling reveals decline in cropland soil pH during last four decades in China’s Mollisols region. Geoderma 2025, 453, 11713. [Google Scholar] [CrossRef]
- Sekulić, A.; Kilibarda, M.; Heuvelink, G.B.M.; Nikolić, M.; Bajat, B. Random forest spatial interpolation. Remote Sens. 2020, 12, 1687. [Google Scholar] [CrossRef]
- Keskin, H.; Grunwald, S. Regression kriging as a workhorse in the digital soil mapper’s toolbox. Geoderma 2018, 326, 22–41. [Google Scholar] [CrossRef]
- Guo, P.-T.; Li, M.-F.; Luo, W.; Tang, Q.-F.; Liu, Z.-W.; Lin, Z.-M. Digital mapping of soil organic matter for rubber plantation at regional scale: An application of random forest plus residuals kriging approach. Geoderma 2015, 237–238, 49–59. [Google Scholar] [CrossRef]
- Suleymanov, A.; Abakumov, E.; Nizamutdinov, T.; Polyakov, V.; Shevchenko, E.; Makarova, M. Soil organic carbon stock retrieval from Sentinel-2A using a hybrid approach. Environ. Monit. Assess. 2023, 196, 23. [Google Scholar] [CrossRef]
- Wang, L.; Wu, W.; Liu, H.-B. Digital mapping of topsoil pH by random forest with residual kriging (RFRK) in a hilly region. Soil Res. 2019, 57, 387–396. [Google Scholar] [CrossRef]
- Ho, V.H.; Morita, H.; Ho, T.H.; Bachofer, F.; Nguyen, T.T. Comparison of geostatistics, machine learning algorithms, and their hybrid approaches for modeling soil organic carbon density in tropical forests. J. Soils Sediments 2025, 1–24. [Google Scholar] [CrossRef]
- Jenny, H. Factors of Soil Formation: A System of Quantitative Pedology; Courier Corporation: Chelmsford, MA, USA, 1994; 281p. [Google Scholar]
- Manning, G.; Fuller, L.G.; Eilers, R.G.; Florinsky, I. Topographic influence on the variability of soil properties within an undulating Manitoba landscape. Can. J. Soil Sci. 2001, 81, 439–447. [Google Scholar] [CrossRef]
- Sharma, S.; Swami, D. Elevation-dependent dynamics of soil properties in a hilly watershed: A landform-based approach. Environ. Monit. Assess. 2024, 196, 1001. [Google Scholar] [CrossRef]
- Jiao, P.; Ou, Y.; Pang, S.; Yan, B.; Zhang, Y.; Xu, W.; Yan, L. Impacts of landscape factors on gully retreat and its morphological characteristics in hilly areas of Northeast China. Soil Till. Res. 2025, 248, 106434. [Google Scholar] [CrossRef]
- Mosleh, Z.; Salehi, M.H.; Jafari, A.; Borujeni, I.E.; Mehnatkesh, A. The effectiveness of digital soil mapping to predict soil properties over low-relief areas. Environ. Monit. Assess. 2016, 188, 195. [Google Scholar] [CrossRef]
- Zhang, Y.; Hartemink, A.E.; Huang, J.; Townsend, P.A. Synergistic use of hyperspectral imagery, Sentinel-1 and LiDAR improves mapping of soil physical and geochemical properties at the farm-scale. Eur. J. Soil Sci. 2021, 72, 1690–1717. [Google Scholar] [CrossRef]
- Baisheva, E.Z.; Bikbaev, I.G.; Martynenko, V.B.; Shirokikh, P.S.; Naumova, L.G. Bryophyte diversity of calcareous fens in the Bashkir Cis-Urals (Republic of Bashkortostan, the Southern Urals). KnE Life Sci. 2018, 19–25. [Google Scholar]
- Hopp, L.; McDonnell, J.J. Connectivity at the hillslope scale: Identifying interactions between storm size, bedrock permeability, slope angle and soil depth. J. Hydrol. 2009, 376, 378–391. [Google Scholar] [CrossRef]
- Komissarov, M.A.; Klik, A. The impact of no-till, conservation, and conventional tillage systems on erosion and soil properties in Lower Austria. Eurasian Soil Sci. 2020, 53, 503–511. [Google Scholar] [CrossRef]

| Soil Property | Depth, cm | Min | Max | Mean | Median | Kurtosis | SD | CV, % |
|---|---|---|---|---|---|---|---|---|
| SOC, % | 0–30 | 3.77 | 8.58 | 6.6 | 6.72 | 0.24 | 0.94 | 14.27 |
| 30–60 | 0.46 | 6.96 | 2.67 | 2.63 | 0.49 | 1.34 | 50.25 | |
| 60–90 | 0.06 | 2.78 | 1.03 | 1 | −0.26 | 0.67 | 65.58 | |
| Clay, % | 0–30 | 0.91 | 38.62 | 7.56 | 4.54 | 4.25 | 8.28 | 109.55 |
| 30–60 | 0.21 | 21.39 | 4.08 | 3.08 | 6.72 | 3.7 | 90.67 | |
| 60–90 | 0.46 | 10.84 | 2.84 | 2.54 | 4.48 | 1.84 | 64.79 | |
| Silt, % | 0–30 | 60.45 | 87.6 | 79.27 | 80.22 | 0.93 | 6.04 | 7.61 |
| 30–60 | 48.33 | 87.21 | 74.95 | 76.94 | 0.45 | 8.91 | 11.88 | |
| 60–90 | 48.83 | 84.68 | 66.65 | 66.78 | −0.9 | 8.65 | 12.97 | |
| Sand, % | 0–30 | 0.93 | 29.92 | 13.2 | 12.76 | −0.6 | 6.99 | 52.92 |
| 30–60 | 2.5 | 51.45 | 21.02 | 19.45 | 0.29 | 10.3 | 49 | |
| 60–90 | 8.63 | 45.19 | 30.51 | 30.19 | −0.64 | 9.36 | 30.66 | |
| AB horizon thickness, cm | 0–90 | 15 | 65 | 38.67 | 39 | −1.12 | 12.87 | 33.28 |
| Penetration, kPa | 0–45 | 617 | 3418 | 1480.86 | 1461 | 2.73 | 499.26 | 33.71 |
| Soil Property | Depth, cm | RMSE | R2 | RMSE | R2 |
|---|---|---|---|---|---|
| Scenario 1 | Scenario 2 | ||||
| SOC, % | 0–30 | 0.94 | 0.12 | 0.91 | 0.15 |
| 30–60 | 1.33 | 0.09 | 1.31 | 0.10 | |
| 60–90 | 0.66 | 0.09 | 0.62 | 0.18 | |
| Clay, % | 0–30 | 7.99 | 0.07 | 8.05 | 0.07 |
| 30–60 | 3.61 | 0.07 | 3.58 | 0.07 | |
| 60–90 | 1.81 | 0.11 | 1.80 | 0.11 | |
| Silt, % | 0–30 | 5.88 | 0.09 | 5.83 | 0.15 |
| 30–60 | 8.70 | 0.12 | 8.40 | 0.15 | |
| 60–90 | 8.19 | 0.16 | 8.18 | 0.16 | |
| Sand, % | 0–30 | 6.79 | 0.13 | 6.63 | 0.16 |
| 30–60 | 9.77 | 0.14 | 9.66 | 0.15 | |
| 60–90 | 9.24 | 0.08 | 9.21 | 0.08 | |
| AB horizon thickness, cm | 0–90 | 13.14 | 0.05 | 12.90 | 0.06 |
| Penetration, kPa | 0–45 | 479.71 | 0.15 | 476.02 | 0.15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suleymanov, A.; Komissarov, M.; Aivazyan, M.; Suleymanov, R.; Bikbaev, I.; Garipov, A.; Giniyatullin, R.; Ishkinina, O.; Tuktarova, I.; Belan, L. Unmanned Aerial Vehicles Applicability to Mapping Soil Properties Under Homogeneous Steppe Vegetation. Land 2025, 14, 931. https://doi.org/10.3390/land14050931
Suleymanov A, Komissarov M, Aivazyan M, Suleymanov R, Bikbaev I, Garipov A, Giniyatullin R, Ishkinina O, Tuktarova I, Belan L. Unmanned Aerial Vehicles Applicability to Mapping Soil Properties Under Homogeneous Steppe Vegetation. Land. 2025; 14(5):931. https://doi.org/10.3390/land14050931
Chicago/Turabian StyleSuleymanov, Azamat, Mikhail Komissarov, Mikhail Aivazyan, Ruslan Suleymanov, Ilnur Bikbaev, Arseniy Garipov, Raphak Giniyatullin, Olesia Ishkinina, Iren Tuktarova, and Larisa Belan. 2025. "Unmanned Aerial Vehicles Applicability to Mapping Soil Properties Under Homogeneous Steppe Vegetation" Land 14, no. 5: 931. https://doi.org/10.3390/land14050931
APA StyleSuleymanov, A., Komissarov, M., Aivazyan, M., Suleymanov, R., Bikbaev, I., Garipov, A., Giniyatullin, R., Ishkinina, O., Tuktarova, I., & Belan, L. (2025). Unmanned Aerial Vehicles Applicability to Mapping Soil Properties Under Homogeneous Steppe Vegetation. Land, 14(5), 931. https://doi.org/10.3390/land14050931