1. Introduction
Groundwater is an important water source in much of the world, especially in arid and semi-arid regions [
1,
2]. In recent decades, groundwater often has been overexploited, particularly in developing countries. Groundwater depth, the distance from ground surface to water table, can be measured by monitor wells, thus can be directly observed. Groundwater depth fluctuations are influenced by natural and anthropic stresses, which can be an indicator for the integrated water resources management. When groundwater exploitation exceeds recharge, groundwater depth increases as the water table falls; in contrast, groundwater depth decreases when recharge exceeds exploitation and can lead to water-logging. Accurate prediction of groundwater depth fluctuation has been crucial for regional sustainable water resources management.
Physical and data-driven statistical models are two main tools for groundwater depth prediction [
3]. The need of large amounts of data on precipitation, groundwater exploitation, soil nature, and human activities such as operation of channels and dams projects is a significant barrier for physical modeling [
1,
4]. To achieve reliable groundwater depth prediction, data-driven statistical modeling is a useful alternative approach.
Statistical models are mainly developed to explore the “input-output” pattern of long term groundwater depth data series for make future estimates. Input data can be single groundwater historic series or exogenous with broader types of available data [
5]. Multi-variable linear regression model (MLR) has been applied in several groundwater level prediction cases [
6,
7,
8]. Since long term historical groundwater depth records can be considered as correlated time series, autoregressive integrated moving average model (ARIMA) has also been used for groundwater fluctuation forecasting [
9,
10,
11]. The advantage of ARIMA is that it can filter extreme values and decrease their interference in prediction accuracy. Linear regression methods are practical and cost-effective. However, linear fitting is not capable to describe many complex groundwater fluctuation problems. Thus, in recent research, linear regression models were usually carried out as a comparative method to highlight better models.
Artificial neural networks (ANNs) are a promising intelligent method that can efficiently capture internal non-linear characteristics of groundwater fluctuations. Over the last decades, ANN has become one of the most widely used algorithms in groundwater level forecasting [
12,
13,
14,
15,
16,
17] and is frequently compared with linear regression. ANNs are more competitive in prediction accuracy for its high efficiency in abstracting non-linear complicated input-output rules [
1,
6,
8]. However, ANN also has limitations. It is quite sensitive to internal parameters, which brings difficulties in model calibration. Although many other intelligent algorithms such as genetic algorithms, particle swarm algorithms and ant colony optimization were integrated into ANN for parameter calibration [
18,
19,
20,
21], underfitting and overfitting are difficult to avoid due to improper model structures and parameters.
Support Vector Machine (SVM) is a modern statistical learning theory in data-driven modeling. The uniqueness of SVM is its structural risk minimization (SRM) objective that balancing model’s complexity against its fitting precision, instead of an empirical risk minimum (ERM) used by most intelligent algorithms that focus mostly on fitting accuracy [
22]. This model architecture greatly improves model generalization ability compared with ERM based algorithms such as ANN. In recent years, SVM is used for hydrologic predictions such as stream flows [
23,
24], precipitation [
25,
26], sediments [
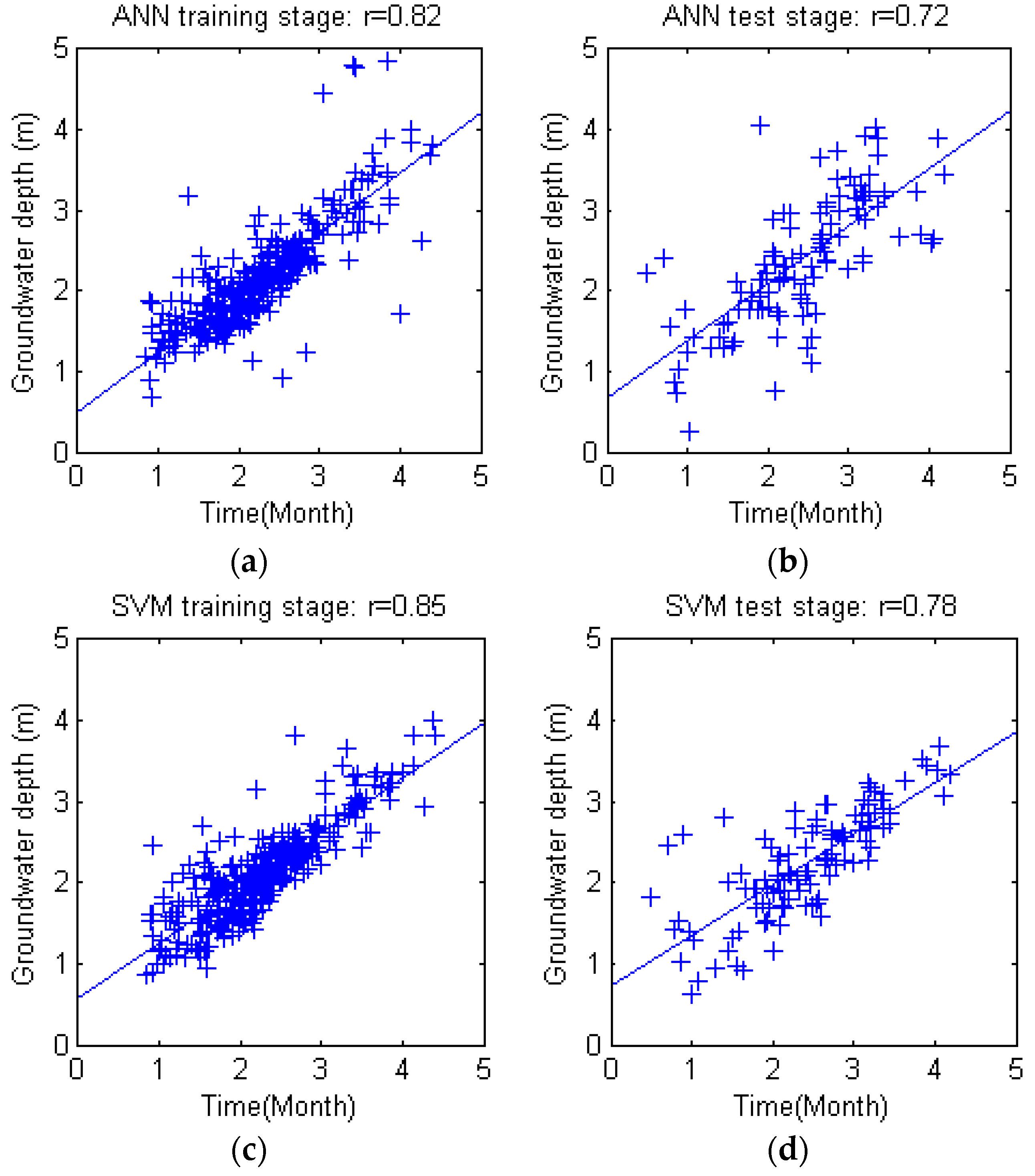
27], and groundwater fluctuations. Most researches found that SVM performs more reliable than ANN. Usually, ANN models have lower mean error than SVM in model calibration, but in model test stage, the mean error of SVM is much lower than ANN, indicating SVM models are often superior in generalization ability [
28,
29].
A problem for intelligent algorithms in hydrology is that most time series are non-stationary, which may lead to poor forecasting ability. For instance, long term groundwater depth process may be influenced by precipitation, evapotranspiration, seasonal cycle, crop yield, and other random issues. Even non-linear intelligent models cannot guarantee precise description of all these features, or such models may become very complicated for it confounds real features and stochastic noise. Therefore, data preprocessing is another important aspect. Preprocessing can be accomplished in various ways. Deleting abnormal points from observed time series can be regarded as preprocess, but it is usually controversial because simply deleting outliers may disrupt randomness in the sample. In ARIMA models, the moving average (MA) is a preprocess method to smoothen time series data [
9,
10,
11]. Fuzzification, the first step in ANFIS model, which disperses determined data to discrete fuzzy scenarios is also a preprocess method [
30,
31]. In time series analysis, preprocess is accomplished by separating trend components, cyclical components, seasonal components and random components from original time series. Wavelet analysis decomposes the initial process into several sub-series for regulation. It has been used in hydrologic prediction modeling as a preprocess method coupled with other prediction models. Adamowski et al. [
6] proposed an ANN prediction model combined with wavelet transform on input data for daily water demands in Montreal, Canada. The hybrid model showed best fitting precision compared with multiple linear regression (MLR), multiple nonlinear regression (MNLR), ARIMA and traditional ANN model. Suryanarayana et al. [
32] proposed a wavelet analysis based SVM model for groundwater level prediction, and the result was also better than SVM, ANN and ARIMA models. However, other models combined with wavelet analysis were not discussed in this paper. Rathinasamy et al. [
33] compared three hybrid wavelet models: WVC (Wavelet Volterra Coupled model, proposed by Maheswaran R. et al. [
34]), WANN WLR, and two regular models: AR and ANN, which was in agreement that hybrid models performed better than regular models. Furthermore, the wavelet based models outperformed significantly with the increase of lead time. Similar results were also indicated by Moosavi et al. in groundwater level prediction using ANN, ANFIS, WANN and WANFIS models [
35].
Nourani et al. [
36] gave a state-of-the-art review of hybrid wavelet and artificial intelligence (AI) models development in hydrology. 105 papers were summarized, concluding that the dominant application of wavelet based AI models is stream flow forecasting, and the dominant AI method is ANN with a proportion of 90%. Due to the low number of research papers in groundwater and water quality subject, the authors recommended conducting additional research in these fields.
This study explores and compares data-driven prediction models for monthly groundwater depth. Discrete wavelet transforms are used to preprocess original groundwater depth time series. Four models: regular ANN, regular SVM, wavelet preprocessed ANN (WANN) and wavelet preprocessed SVM (WSVM) were developed and applied in parallel under the same time horizon. The ANN based models represent classic intelligent algorithm, while the SVM models are proposed in this paper to explore more efficient prediction for non-stationary data process. Specifically, the performances of ANN based model and SVM based model were comprehensively compared, drawing a conclusion that SVM based model is superior to ANN based model from both theoretical and practical point of view. Thereafter, the effect of wavelet preprocess was analyzed by comparisons between regular models and wavelet preprocessed models, which demonstrated the role of data preprocessing in non-stationary time series prediction. Finally, the best model, WSVM, was discussed with stability analysis.
2. Study Area and Data
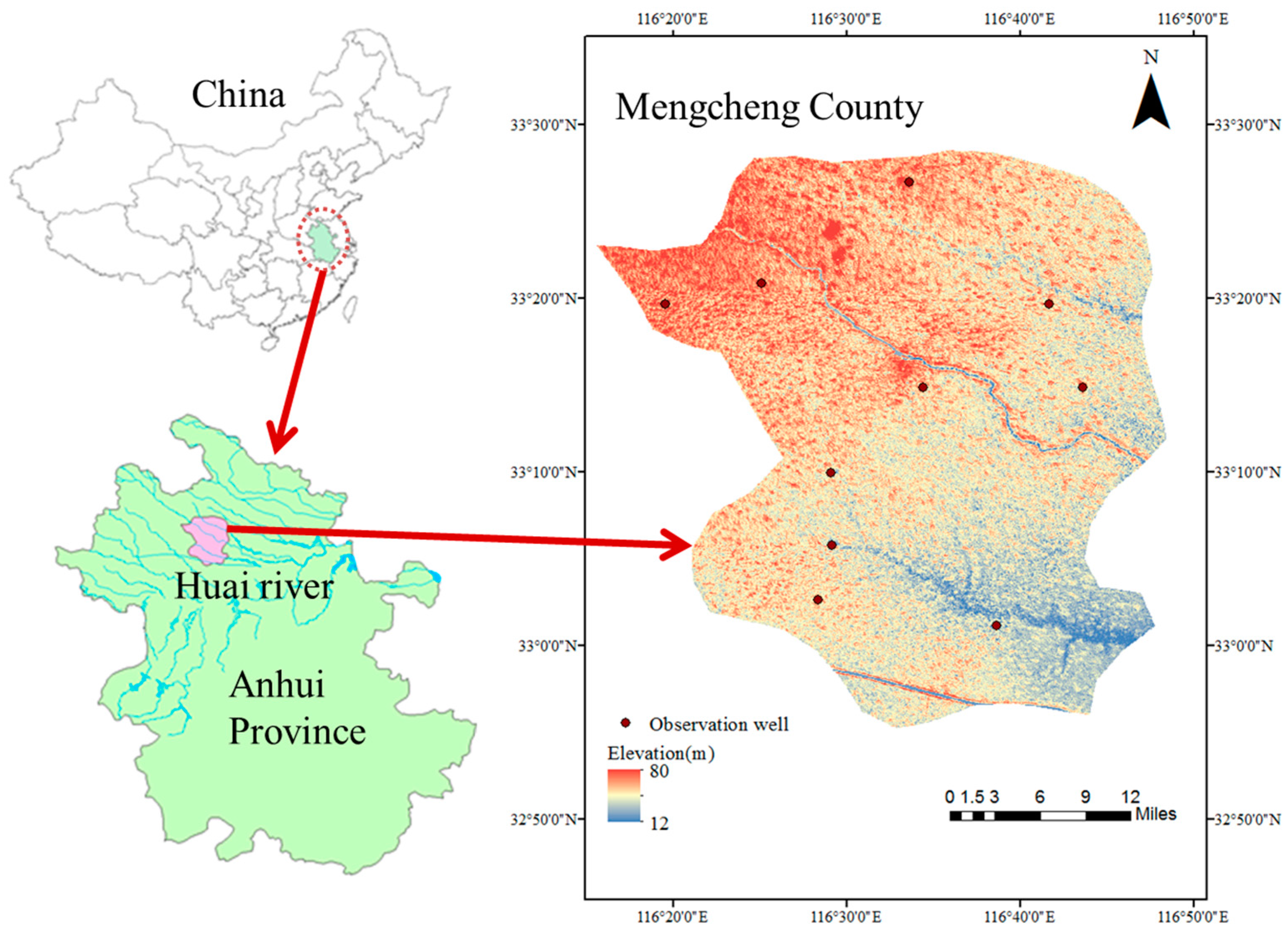
Mengcheng County is in the Huai river basin of Anhui province, China (
Figure 1). Mengcheng County is home to 1.40 million people, of which 22.5% are urban and 77.5% are rural. The total area of Mengcheng County is 2091 km
2, comprising 318 km
2 (15%) urban land and 1773 km
2 (85%) of agriculture land, so water is of vital importance for this agrarian county.
The Mengcheng County lies in the north-south climate boundary of China. Annual average precipitation is 873 mm. Mengcheng County relies on groundwater. Precipitation can guarantee groundwater recharge in most years, but there remains great gap between precipitation and water use demands in many years. Therefore, groundwater pumping has long been important supplement in Mengcheng County for it is convenient and cheap, meanwhile the supply is reliable and sustainable.
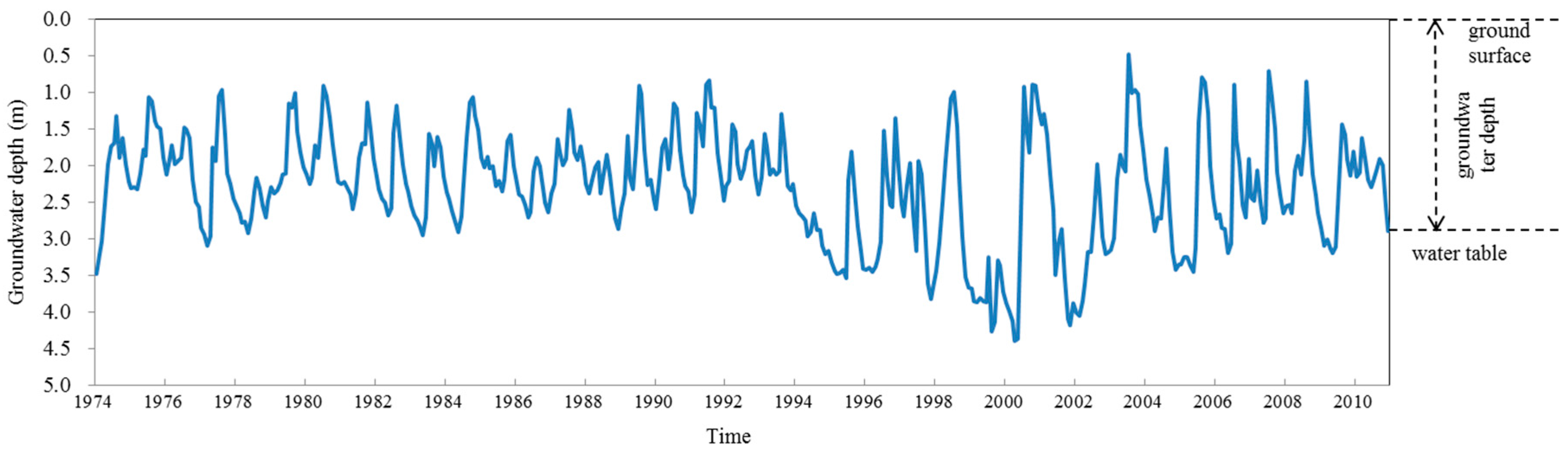
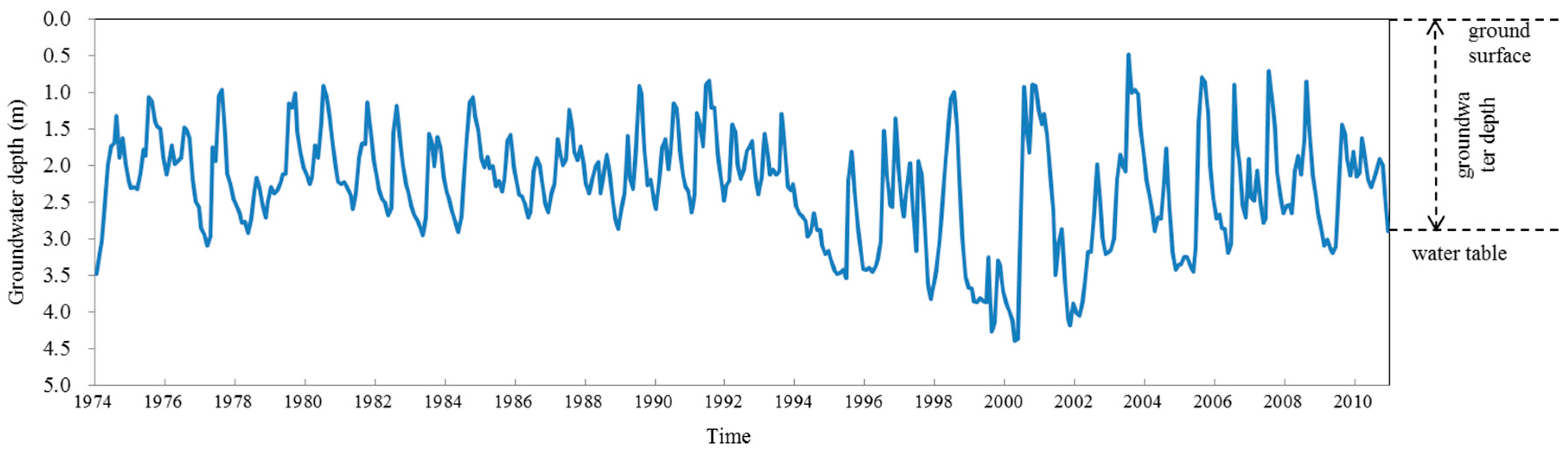
Mengcheng County has been facing severe groundwater depletion, mainly for agriculture. In the 1970s, ten observation wells were set in Mengcheng County to monitor groundwater fluctuations. A total of 444 months were observed with records from January 1974 to December 2010. The well specifications are shown in
Table 1. Here we use the average data of the ten wells to represent the groundwater depth fluctuation. Moreover, the averaged monthly groundwater depth series, average groundwater depth and precipitation by month, as well as annual average groundwater depth are shown in
Figure 2,
Figure 3 and
Figure 4, respectively. Several temporal characteristics can be found as follows:
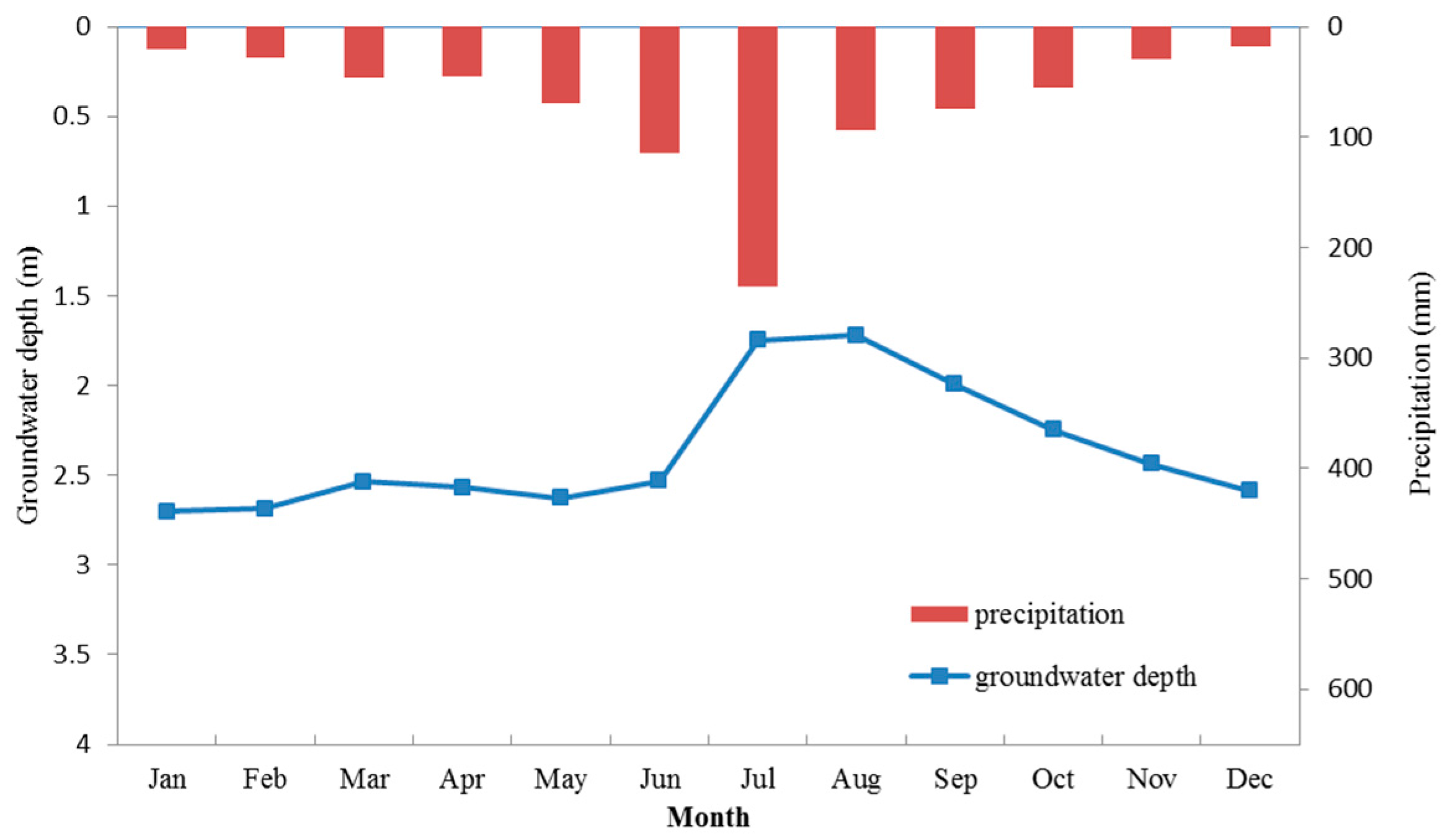
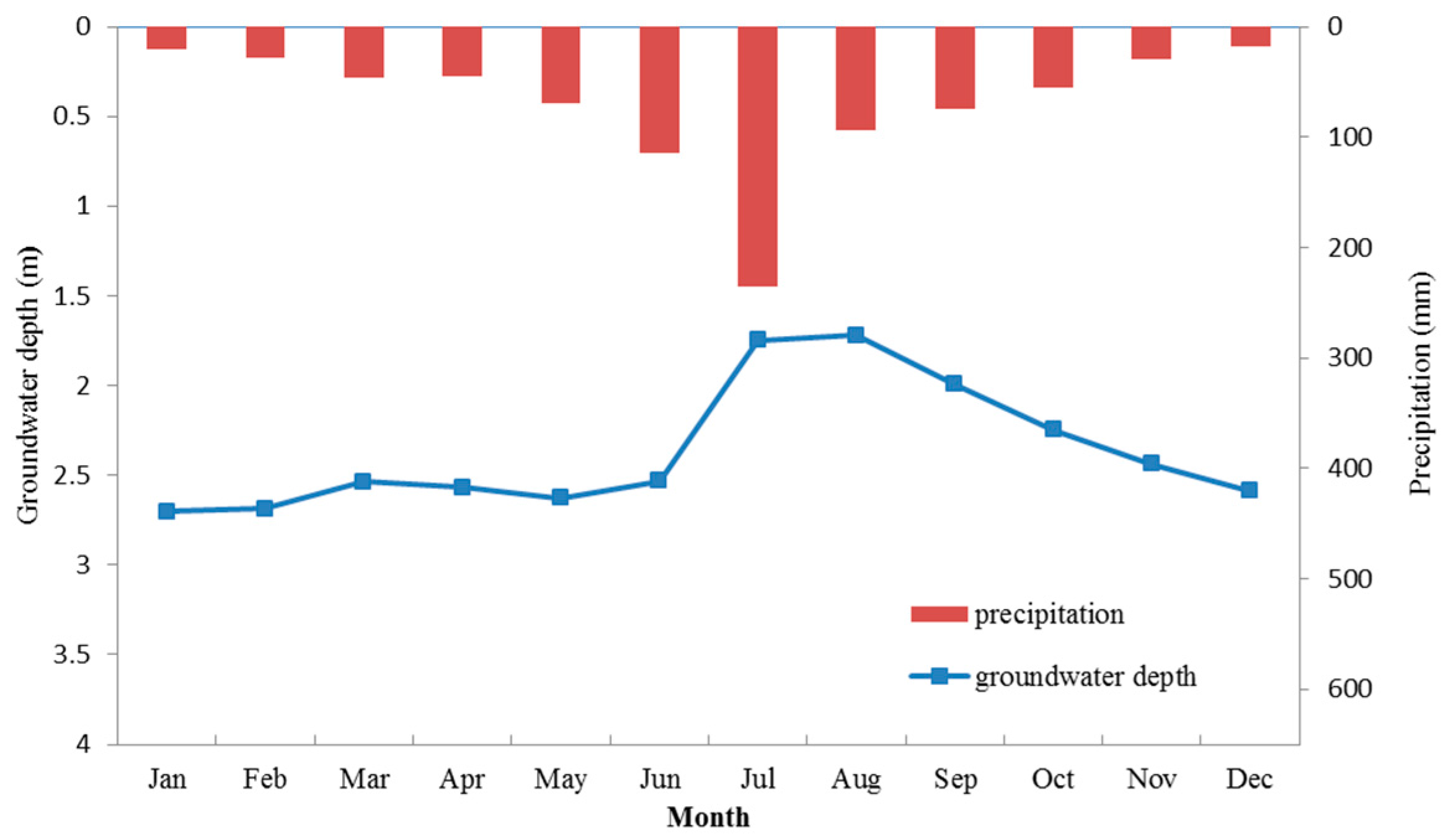
First, the groundwater depth shows seasonal periodicity. Precipitation in Mengcheng County concentrates in June, July and August (
Figure 3). Correspondingly, groundwater depth decreases during the three months as the water table rises. In contrast, groundwater depth increases with the decrease of precipitation after September. May and June are exceptions where precipitation increases but groundwater depth does not significantly decrease, probably due to intensive groundwater pumping for irrigation in May and June.
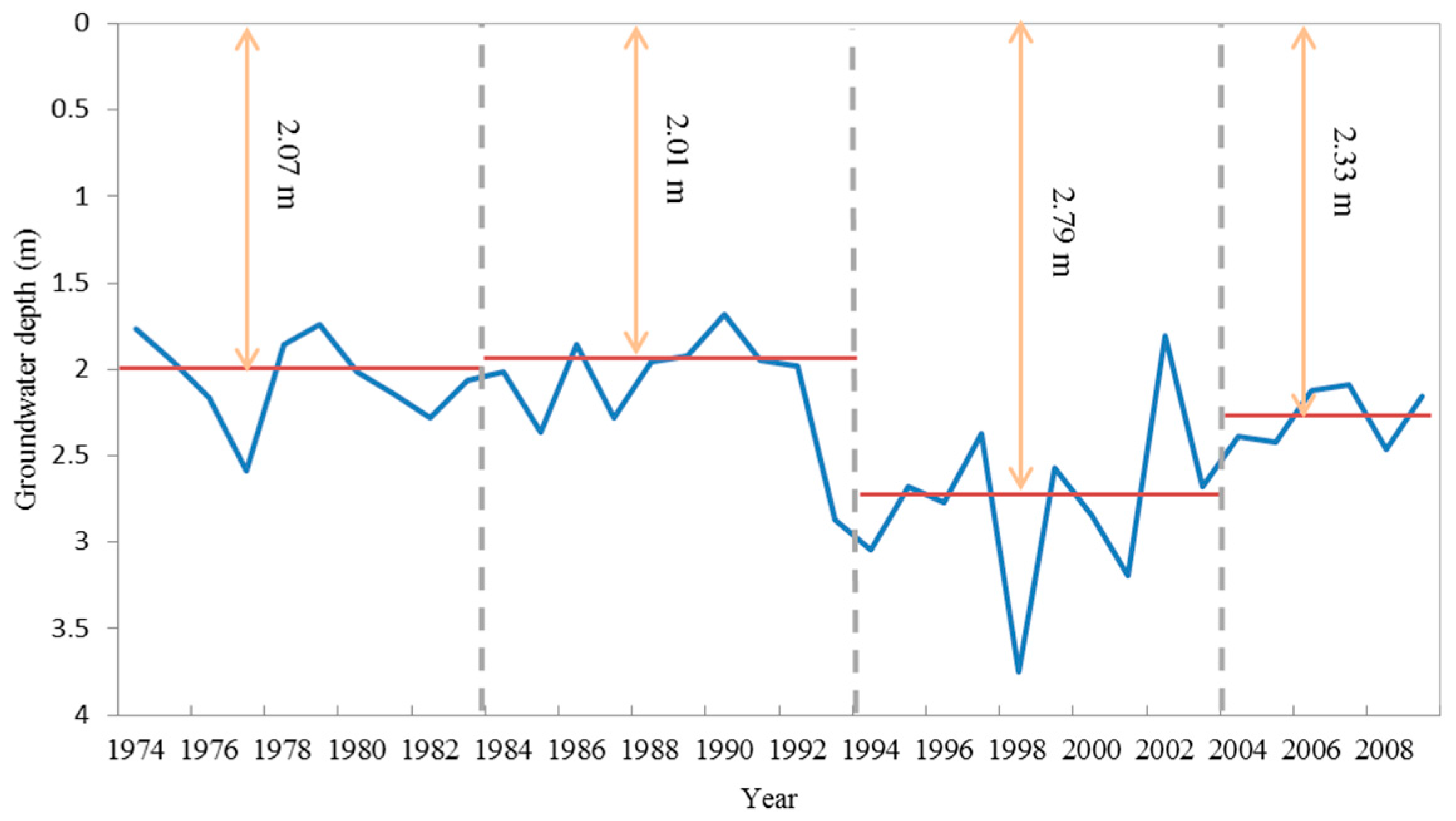
Second, annual average groudwater depth varies greatly from year to year and even from period to period, as shown in
Figure 4. The maximum annual average groundwater depth of 3.75 m occurred in the drought year 1999; while the minimum is 1.68 m occurred in 1991, when the Huai river flooded. These characteristics indicates groundwater depth is strongly influenced by the north-south boundary climate conditions.
By dividing 37 years into four periods: 1974–1983, 1984–1993, 1994–2003 and 2004–2010, the groudwater depth was relatively even during the first two periods, and then encountered a sharp drawdown in the third period, finally restored after 2004. This trend is driven by the groudwater exploitation history of Mengcheng County. Before 1990, agriculture was not very advanced and precipitation can satisfy most demand, so groudwater depth was in a natural even status; during 1990 to 2000, irrigation economies flourished with population growth and commercial expansion. Groudwater abstraction was becoming more severe for agricultural and domestic use. Many wells in the countryside were illegal and pumping was irregular, which caused sudden declines of groundwater level. As a result, groundwater depth sharply increased by 38.8%, to an anverage of 2.79 m. After 2000, since the rise of environment protection and water saving irrigation in China, groudwater overexploitation drawn more attention. Mengcheng County carried out many water resources conservancy projects to decrease and regularize groundwater pumping. As a result, the groundwater rose slowly to a depth of 2.33 m.
The groundwater depth process of Mengcheng County is complicated in statistical features and influenced by both natural environment and human activities. Physical models alone are not realistic in this case to predict groundwater depth, and linear methods are not able to describe the comprehensive characteristics. Therefore, non-linear intelligent algorithm with data preprocess would be a suitable method to establish the groundwater depth prediction model.
3. Model Development
3.1. Model Configuration
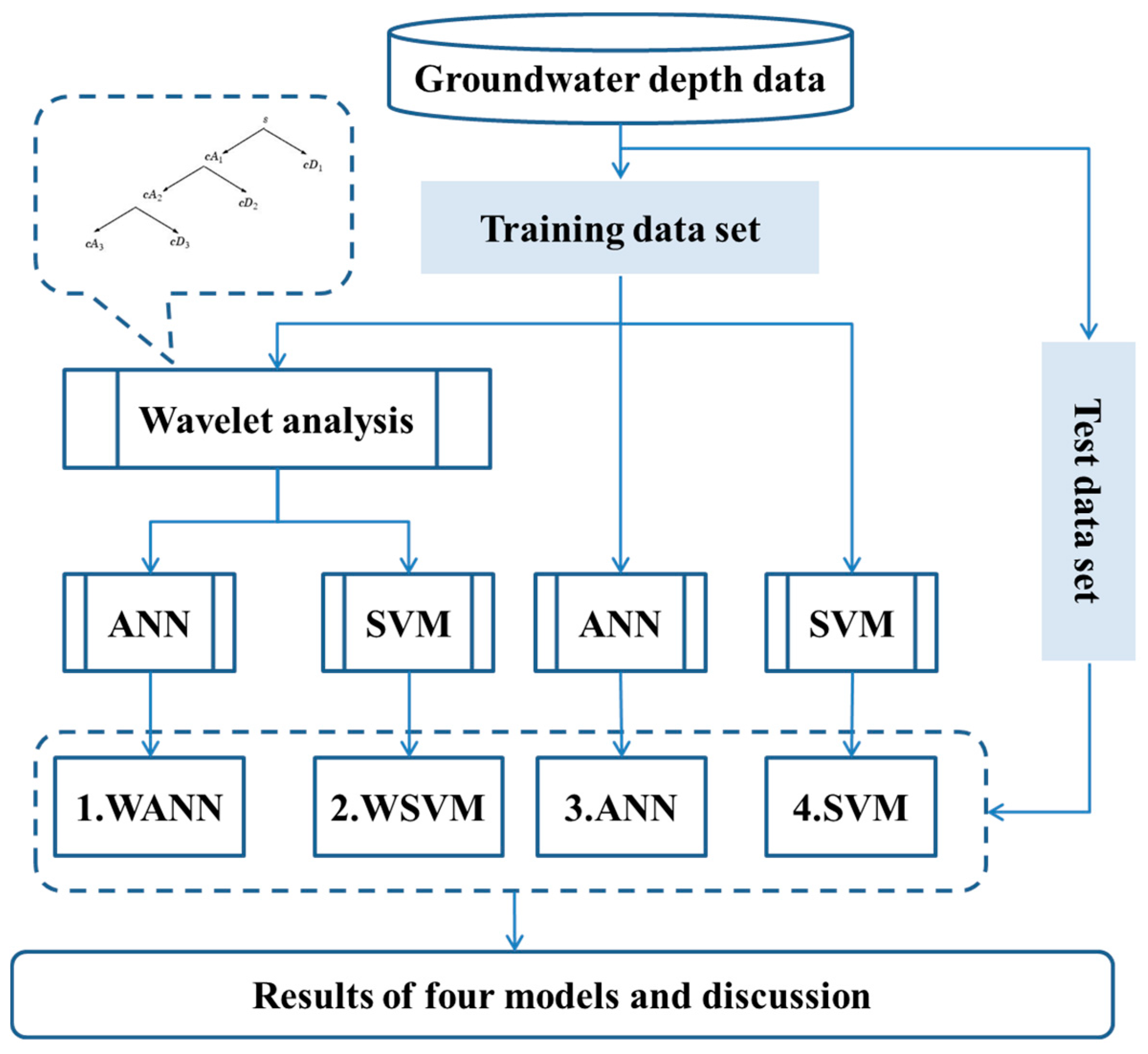
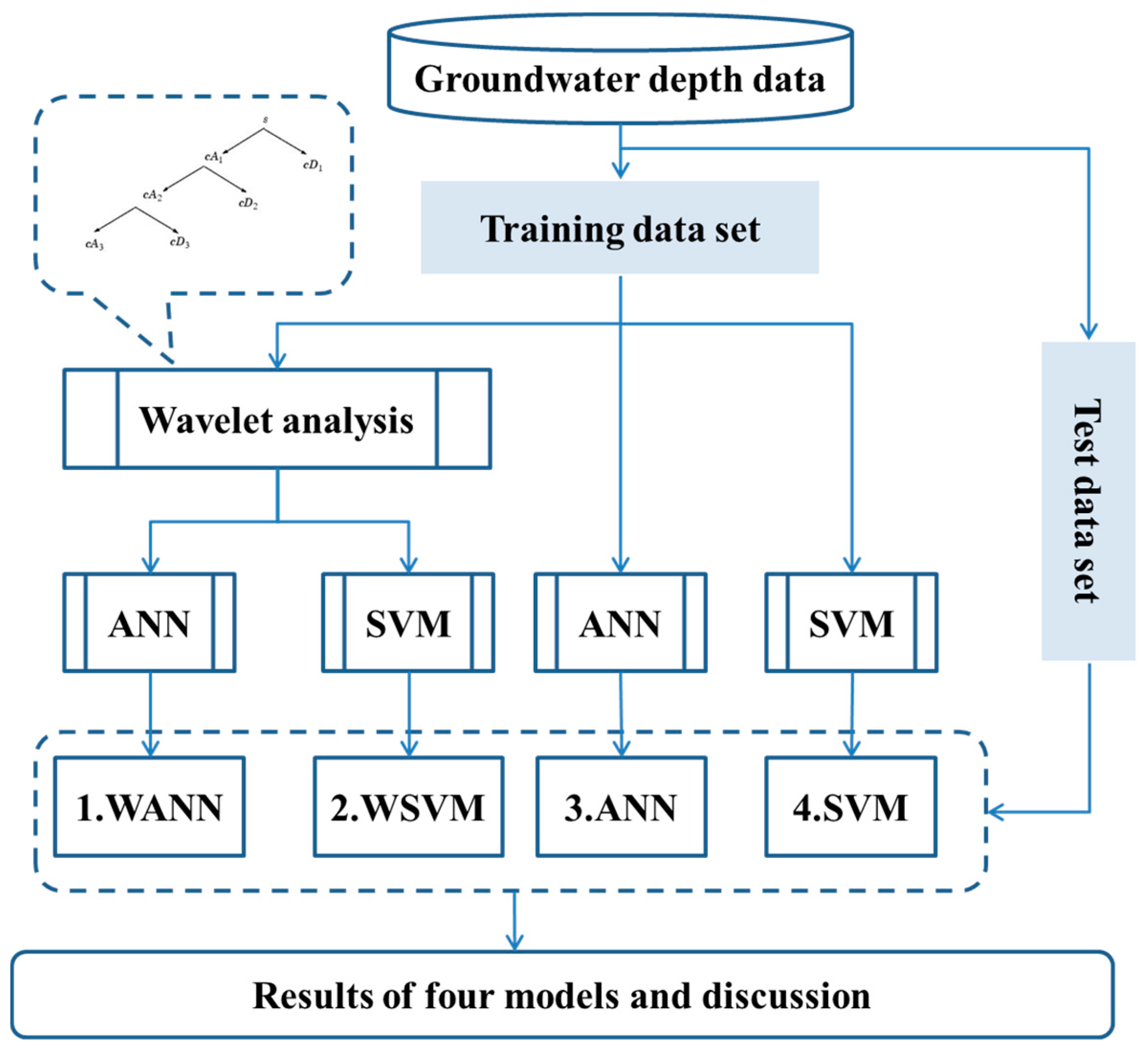
In this study, a hybrid machine learning method combining wavelet analysis is proposed to predict monthly groundwater depth. The core idea is to form a set of subseries of groudwater depth time series by wavelet analysis and then calibrate prediction model for each subseries. The overall method consists of six major schemes (
Figure 5), summarised below:
- (1)
Divide overall groundwater depth into two sets: training set and test set. Sample sizes of both sets should be adjusted. Usually the training set size should be larger than test set size to guarantee the objectivity of model.
- (2)
Build an ANN/SVM training model with parameter calibration using training set data, and apply the model to test set, which generates prediction results of ANN/SVM model.
- (3)
In parallel with step (2), construct a multi-level wavelet transform model to decompose original groundwater depth time series to several subseries.
- (4)
Build ANN/SVM training model with parameter calibration for each subseries, and apply each model to corresponding subseries of test set.
- (5)
Integrate the results of each subseries in chronological order to generate prediction results of WANN/WSVM model.
- (6)
Compare four models results in step (2) and (5), and analyze the effect of each module in the hybrid model.
The key modules of the hybrid models are introduced below.
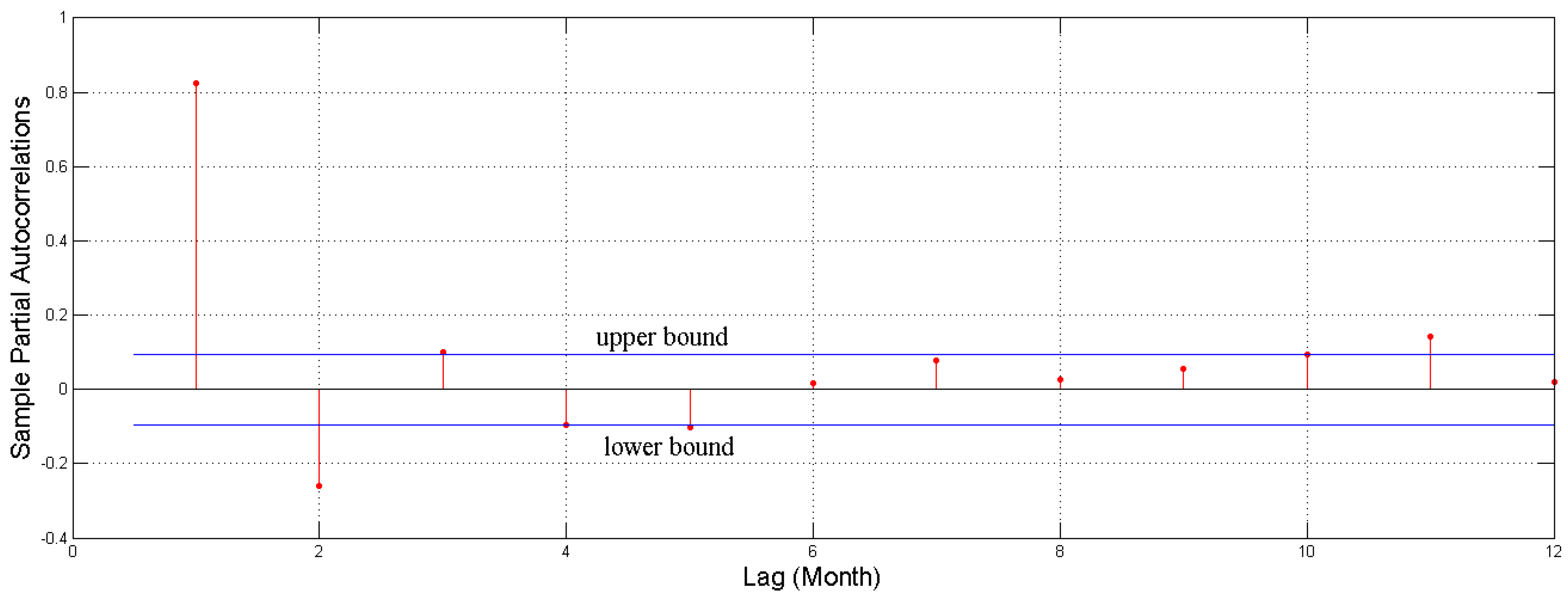
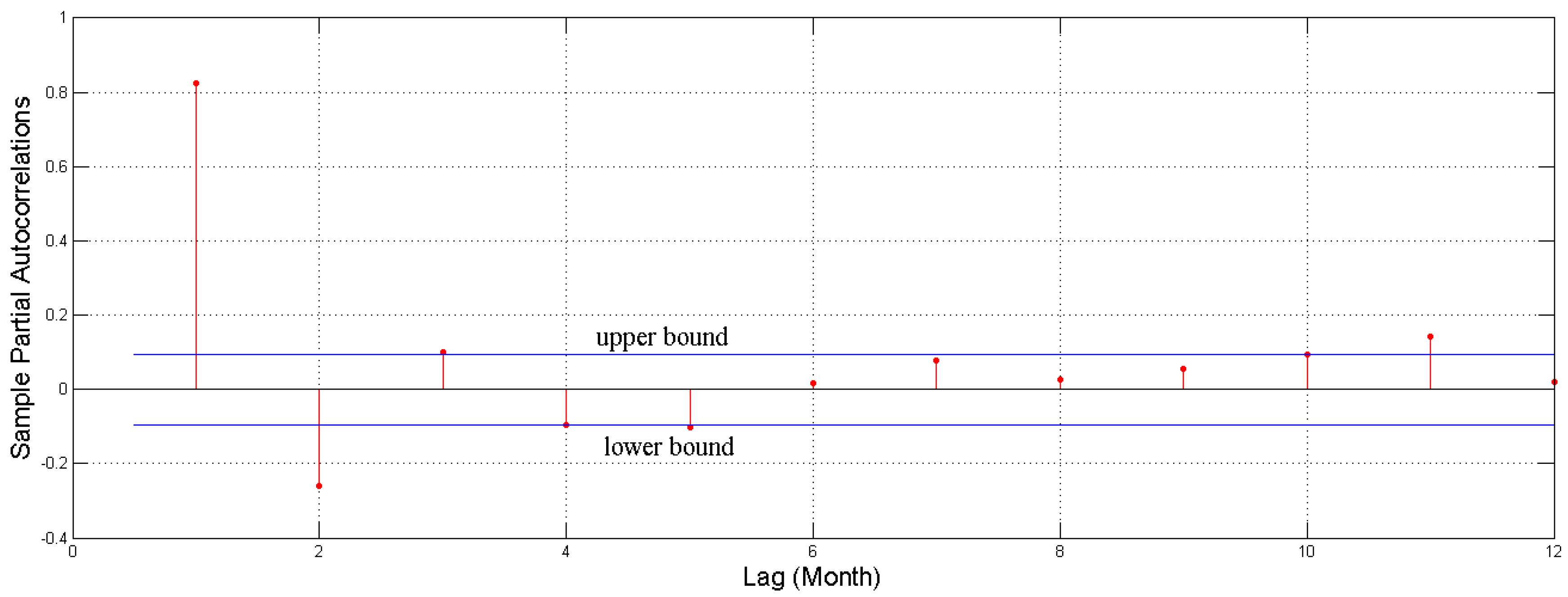
3.2. Determination of Lag Time
In this study, the prediction model has a “input-output” time-lag structure, where output is groudwater depth for
t time step and inputs are goundwater depth in
t-
n previous months. Here, in order to determin the lag time
n, a partial autocorrelation function (PACF) was carried out to test the correlation of the examined time series [
37].
Figure 6 plots the PACF of groundwater process with 95% confidence bounds (blue solid line). The correlation pattern indicated that a strong correlation exists among groundwater depths in consecutive months, which proves the feasibility of forecasting groundwater depth using groundwater depth in previous months. Further, an autoregressive model with lag time 5 may be warranted for this time series, since there are notable partial autocorrelation for the lag 1 to 5.
3.3. ANN Training Model
ANN is a classic learning system inspired by biological neural networks. An ANN model has a multi-layer feedward structure connected by several nodes in each layer. Each node is a processer for “input-output” calculation. By parallel and massive iteration in the network, a convergent stable “input-output” structure may be achieved through a procedure known as model training. The goal of ANN is to find a function that fits given datasets best.
ANN is more effective in extracting and expressing hidden non-linear input-output relationships than traditional algorithms. Nevertheless, the flexibility of ANN structure also brings difficulties in model tuning. Improper settings of network structure or nodes may lead to deterioration in fitting performance, such as overfitting or underfitting. Evolutionary algorithms such as genetic algorithm (GA) particle swarm algorithm (PSO) and ant colony algorithm (ACA) have been emploryed in ANN model for parameter optimization and achieve improvement in model efficiency. As discussed above, the lag time of model structure is five, denoting the input variables (which is represented by input node in ANN) are previous five months data of each target output. Therefore, the input and output node numbers are 5 and 1 in ANN model structure. Node numbers of hidden layer is dependent on input and output node numbers as well as data feature. With the increase of node numbers, the model will be trained to fit more details but the generalization ability might decrease accordingly. Here the initial node number was set to be 25. Therefore, a (5:25:1) ANN model with 5 nodes of input layer, 25 nodes in hidden layer and 1 node of output layer was established as initial model structure. The node number of hidden layer is optimized by numeration from 25 to 5 with decremental step of 1. A genetic algorithm was combined in the node weight values of hidden layer in model calibration.
The data used to construct or discover a predictive model is called a training set, while data used to assess the model is called a test set. The quantity of training set and test set samples should be reasonably divided to assure the objectivity of both training and test procedures. Since we have 444 months of groundwater data sets, we defined a 3:1 ratio for training and test set samples. Specifically, groundwater depth data from 1974 to 2001 is training set, while data from 2002 to 2010 is test set.
3.4. SVM Training Model
3.4.1. SVM Algorithm
SVM is a machine learning theory based algorithm. SVM does not have a pre-determined structure, while the training samples are judged by their contributions. Only selected samples are contributed to the final model, which are the socalled “support vectors”. The SVM objective function can be expressed as:
where
denotes direction vector,
C denotes adjustment factor,
and
are slack variables,
represents mapping input vector
to high dimensional hyperspace,
is intercept of regression function and
is non-sensitivity coefficient. The former part of objective function represents the model complexity, while the latter part represents fitting error. In SVM theory, the model reaches best performance when the sum is minimized. SVM models seek the simultaneous optimum of model generalization performance and fitting performance.
The SVM model is a high dimensional quadratic programming problem. To avoid “dimensional disaster”, a kernel function is introduced to convert high dimensional computing into low dimensional computing. Generic kernel functions include linear, radial basis function (RBF), Gaussian, polynomial, and other kernel functions. Among them, the RBF kernel is superior to the linear kernel when dealing with high dimensional complex samples; compared with Gaussian and polynomial kernel functions, the parameter of RBF kernel function is simple. Thus, the RBF kernel is often chosen to solve the SVM model, expressed as:
where parameter g is used to fit different samples distributions.
3.4.2. PSO Parameter Calibration Method
The effectiveness of SVM depends on the selection of objective function parameter
C, kernel parameter and non-sensitivity coefficient
. There is currently no widely accepted best way to optimize SVM parameters. Grid search (GS) with exponentially growing sequences of combination {
C,
g} is often applied [
38]. Grid search is easy to implement but has low computing efficiency. Moreover, optimal result of grid search can only generate from existing grid combinations, while unknown possible better parameters can not be explored and discovered.
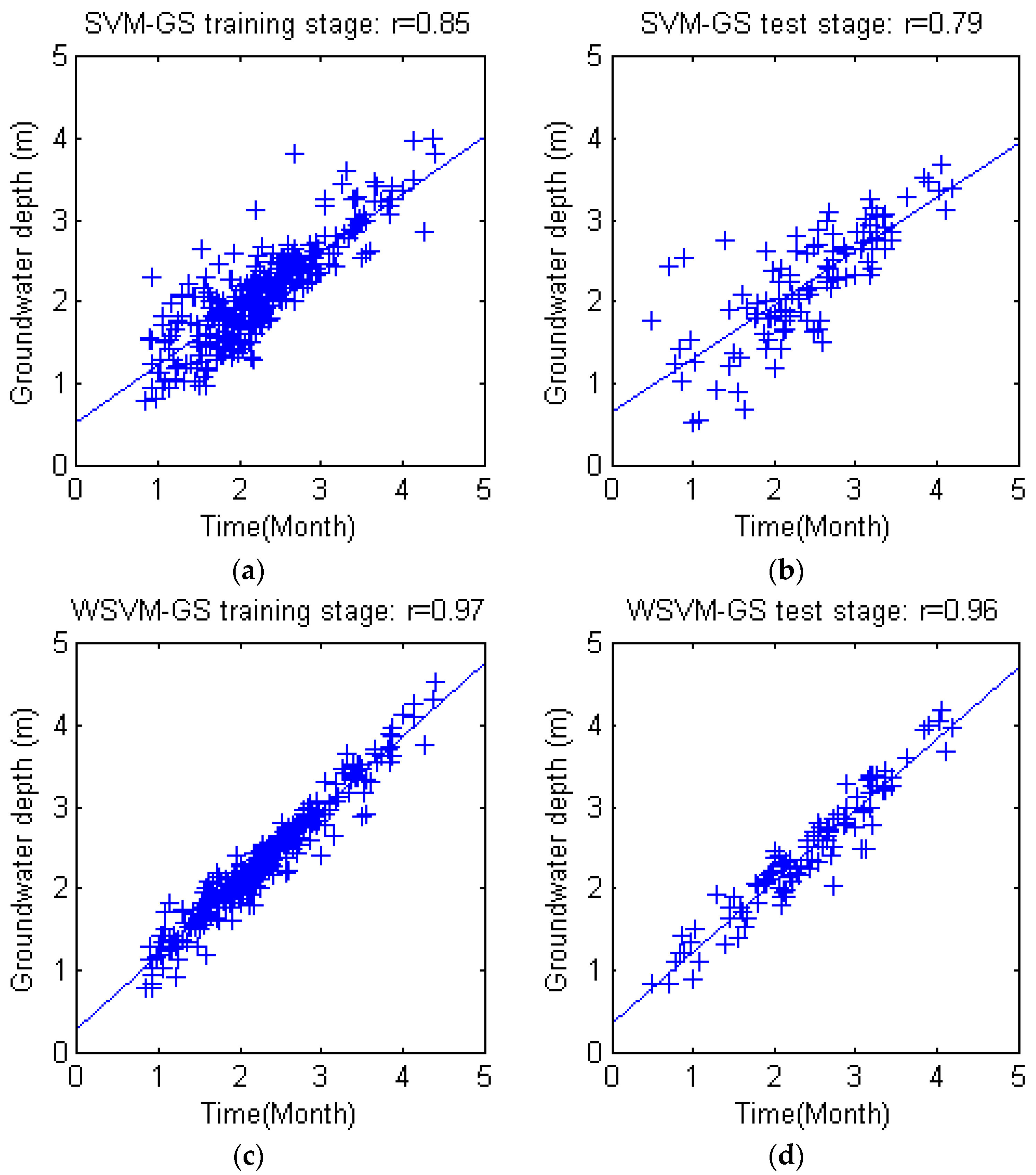
In this study, a PSO based parameter optimization method is adopted to search for best parameter combination. The performance of SVM is more sensitive to the value C and g than , for the range of is quite small that generally within interval [10−4, 10−1].
The PSO algorithm is derived from the migration mechanism of birds during foraging, which has advantages of fast convergence, efficient parallel computing and strong universality which is able to efficiently avoid local optimum [
23,
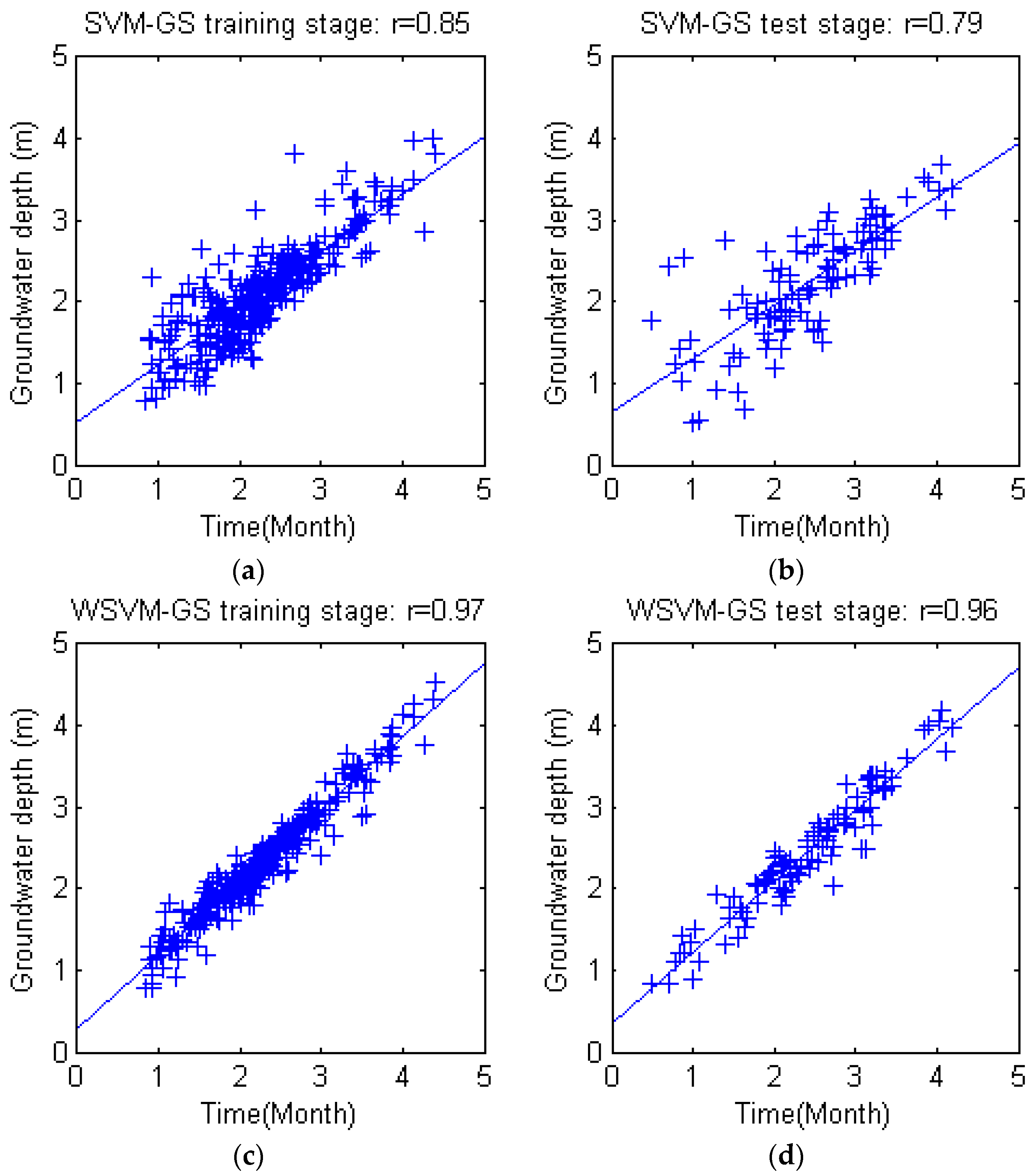
24]. Moreover, the iteration velocity of particle is influenced by the sum of current velocity, historical particle value, current global optimal value and random interferences, which avoids local optima to a large extent and improves search coverage and effectiveness. In this study, grid search also has been tried for comparison in this study—the PSO method is shown to be much more efficient. Parameter
C was enumerated within set {2
−5, 2
−4, 2
−3,… 2
5} and
g in set {2
−7, 2
−6, 2
−5,… 2}. Each combination was enumerated to determine the best parameter set. The training and test results of grid search based SVM and WSVM are shown in
Figure 7. It is obvious that the PSO based SVM/WSVM simulation accuracy (shown in
Section 4.1) bested the grid search based SVM/WSVM model.
3.4.3. Cross Validation
In machine learning algorithms, the basic purpose is fitting the model to training data, with the ultimate goal of making reliable prediction on unknown test data. However, favorable training performance does not always lead to reliable test performance. Overfitting is an example of this case. An overfitted model usually has minor training error but large test error, as the model learned too much unnecessary details from training data but fails to fit unknown test data. Overfitting may occur due to improper training mechanisms and internal parameters, which would lead to the more complicated and sensitive model. Although the proposed SVM model takes generalization performance and parameter calibration into account, overfitting may still occur caused by data bias in training, especially when the training set is small.
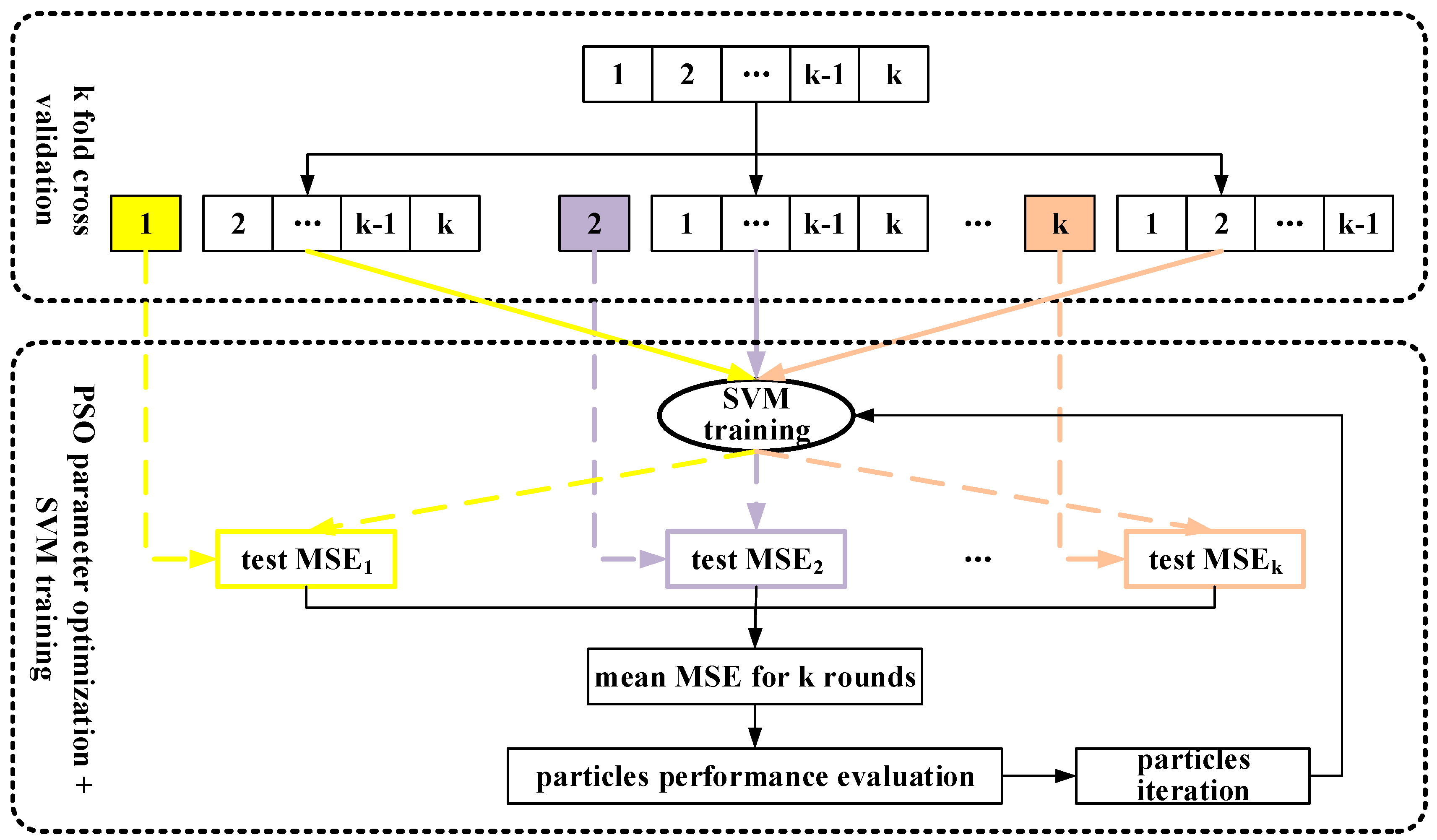
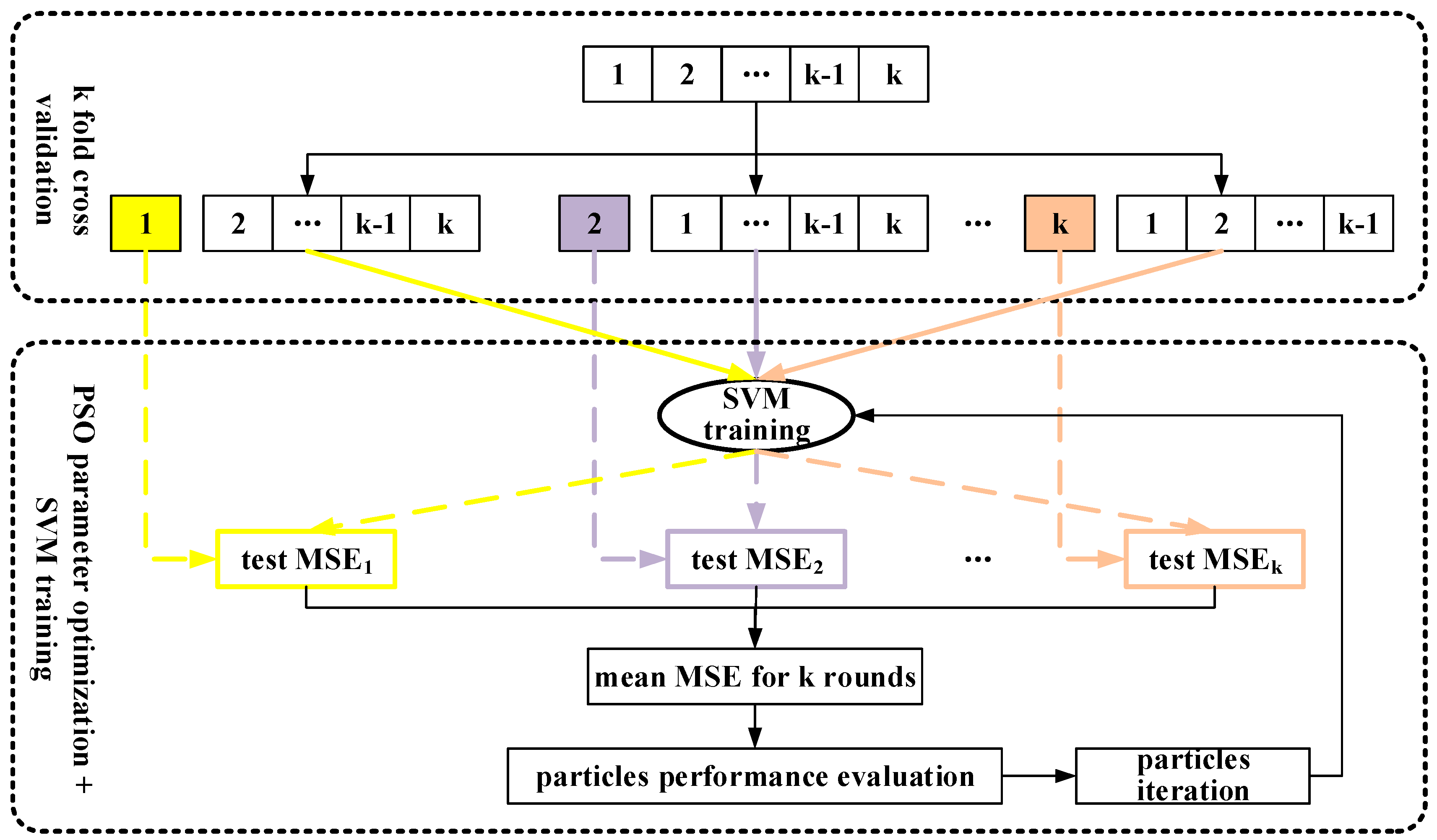
K fold cross validation mechanism was adopted to further avoid overfitting. The original training set was partitioned into k equally sized subsets. From the k subsets, a single subset was retained as a validation set, and the remaining k − 1 subsets were used as training set. The cross-validation process was then repeated k times (the folds), with each of the k subsets used as the validation data, alternatively. The final performance of a k fold model training was the average of validation performances in k subsets. Usually the value of k is determined by samples availability, generally from 2 to 10. Considering the overall training sample size is moderate, k is set to be 4 in this study.
The advantage of k fold cross validation mechanism is that in each round, the training sets and validation set are independent. Therefore, the performance is objective, creating a solid foundation for model optimization. Besides, the implementation of cross validation can improve efficiency of data utilization. In model configuration, the overall data set should be commonly divided into three independent sets: model calibration set, validation set, and test set. Sample sizes in each set might be small and lack of representative. By involving cross validation, the calibration set and validation set are combined as a whole, so the overall data would be divided into two sets. By the k fold of randomly dynamic division of training samples, the model can be more stable and objective.
In this study, the ratio of training samples and test samples is 3:1, indicating 75% training samples and 25% test samples. Considering 4 fold cross validation is applied on training set to train and calibrate the model, the calibration samples account for 75% of the overall training samples, and the rest 25% are validation samples. In summary, the ratio of calibration samples, validation samples, and test samples are 56.25%, 18.75%, and 25%.
The final hybrid SVM model, which integrates SVM theory, PSO parameter optimization method and
k fold cross validation was trained on the whole training set, as shown in
Figure 8.
3.5. Wavelet Based Preprocess Analysis
Wavelet transform is used for de-noising, compression, and decomposition of data series. In wavelet transform analysis, a time series process is considered consisting of low frequency components and high frequency components. Low frequency component represents general and regulated features of time series, such as cyclical and seasonal trends, while the details and chaotic element is preserved in high frequency component. Similar with components seperation in time series analysis, the seperation of these features may be helpful to extract the inherent patterns of original time series.
Discrete wavelet transform (DWT) is a method for seprating the low frequency and high frequency components into given layers. Mallat transform, proposed by Stephane Mallat in 1989 [
39] has been the most practical and efficient method for DWT implementation.
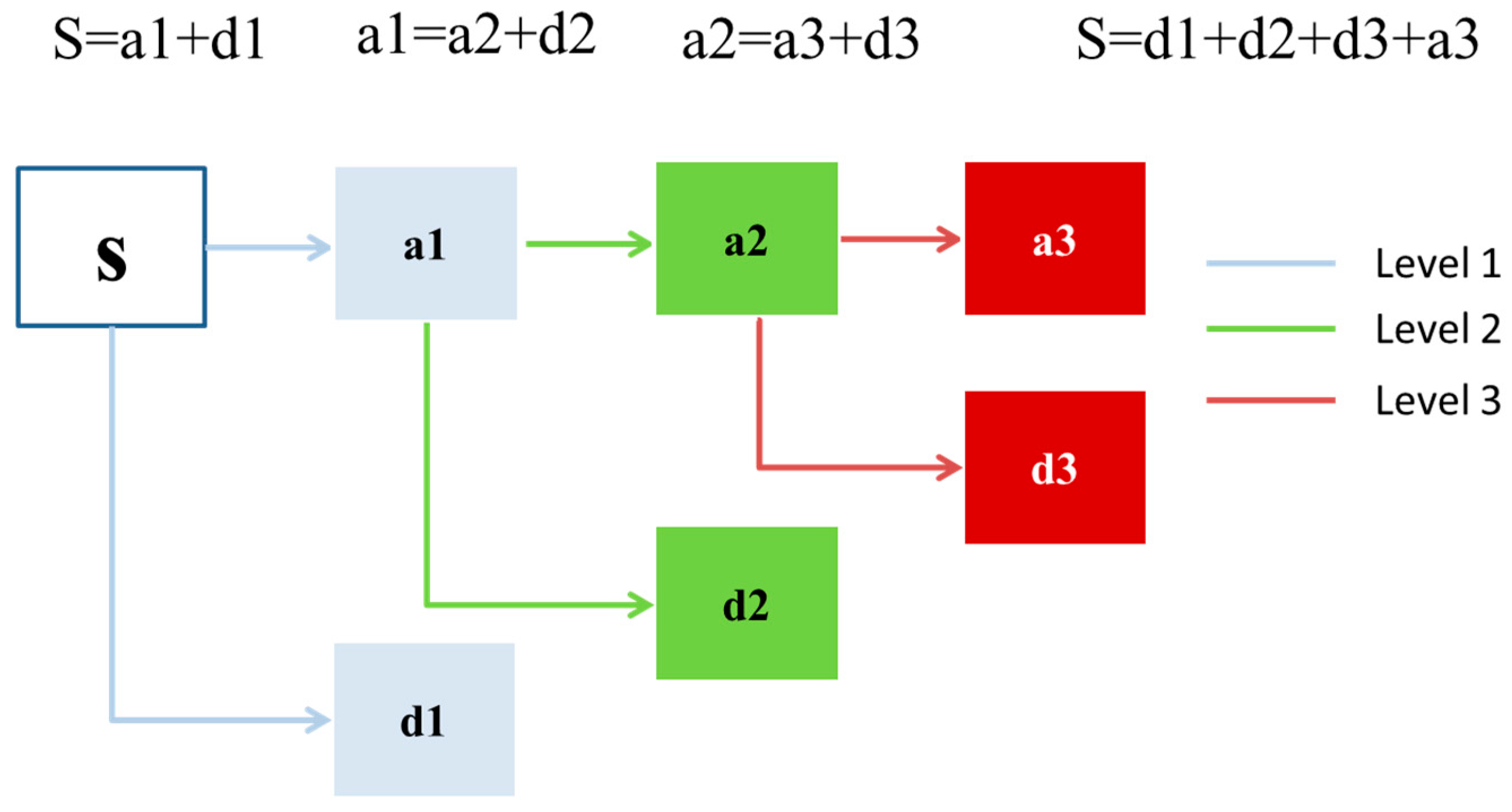
Figure 9 illustrated the framework of Mallat DWT theory. The original groundwater depth S passes through level one filter and emerges as two signals: low frequency component a1 and high frequency components d1, and this is called one level wavelet. Similarly, the decomposition process can be operated for
n times, with low frequency components successively broken down into lower components, which is called
n level DWT. Therefore, a DWT with
n levels will generate
n + 1 subseries, which consists of
n high frequency and 1 low frequency subseries. The proper level
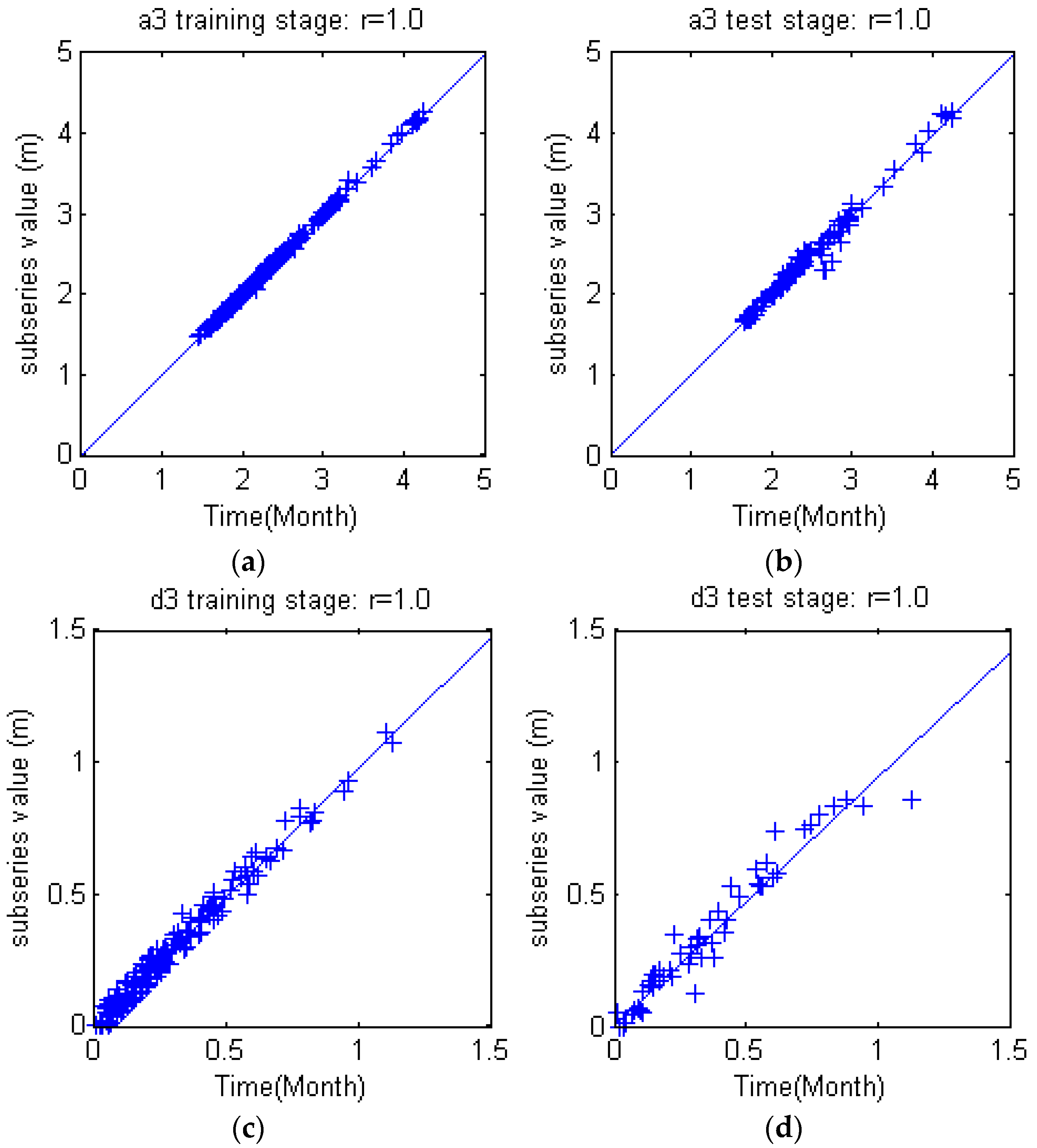
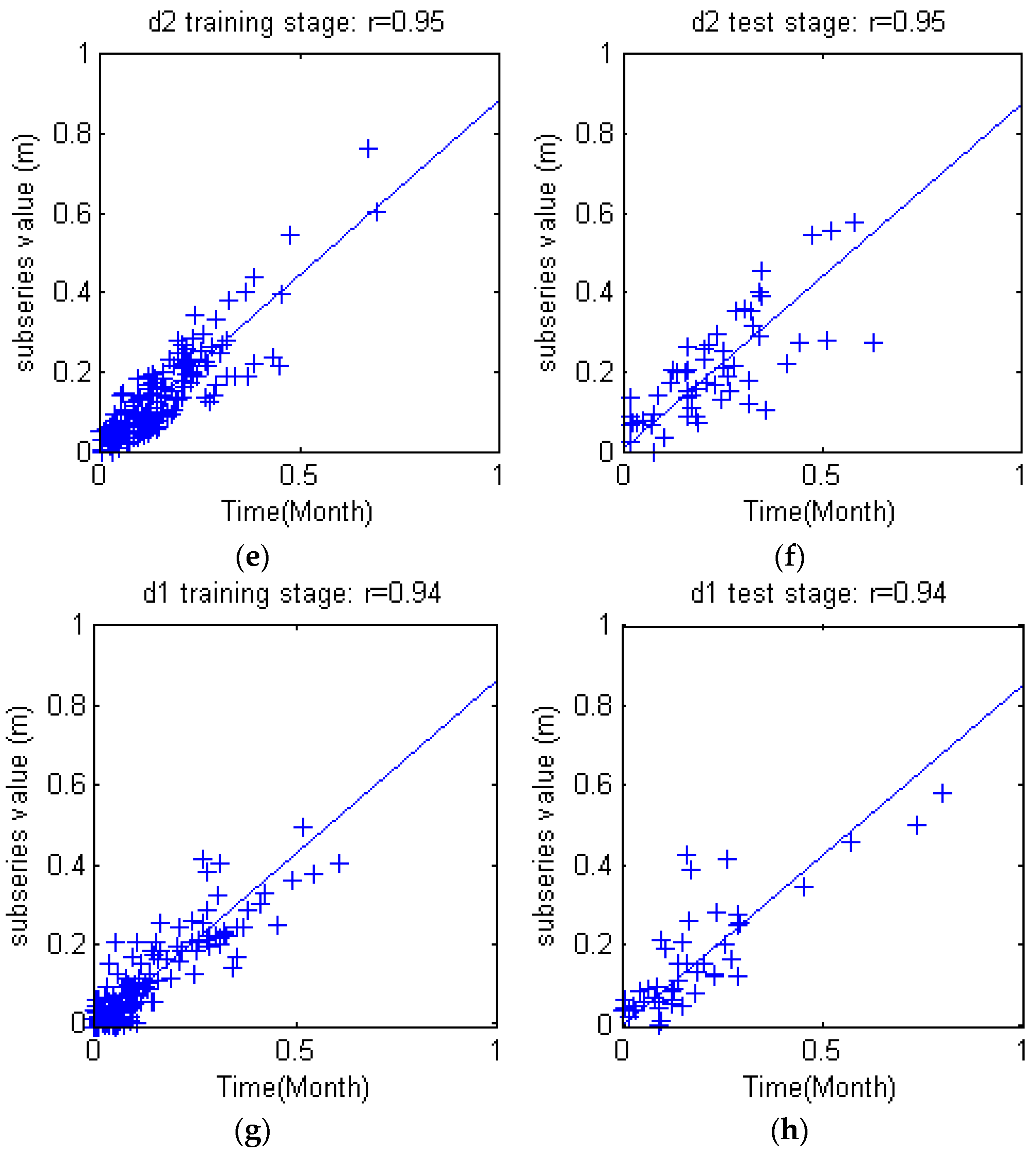
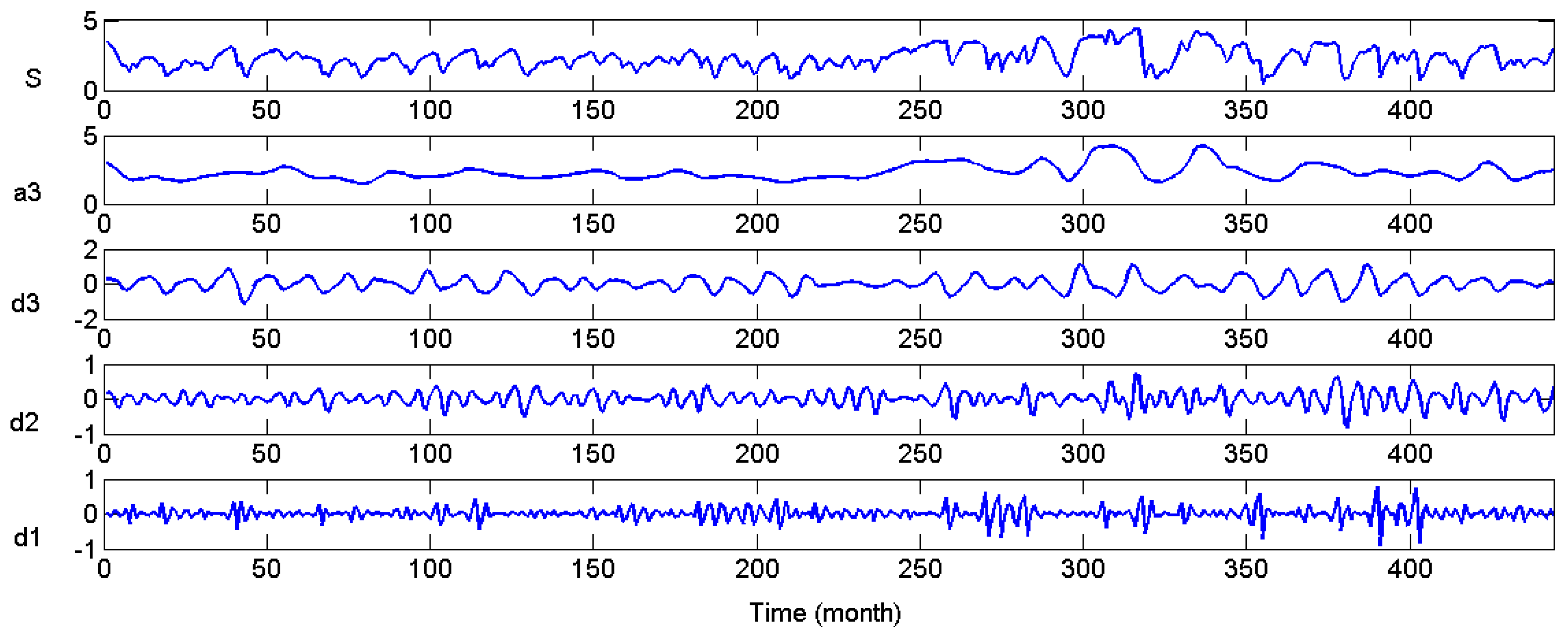
n is determined by data series feature. If the data is chaotic which need intensive refining, the level is better to be larger. However, it is noted that increasing DWT level does not necessarily mean model performance improvement, for the error layers will also increase with level increase. In this study, several rounds of test were carried out that enumerating level from three to six, a three level DWT is shown to be best. Several types of wavelet functions can be used in DWT, including Meyer wavelet, Haar wavelet, Daubechies wavelet, ReverseBior wavelet, etc. In this paper, the Daubechies wavelet was chosen for its compact support and orthogonality, which has enormous potential in describing details of groundwater depth fluctuations accurately.
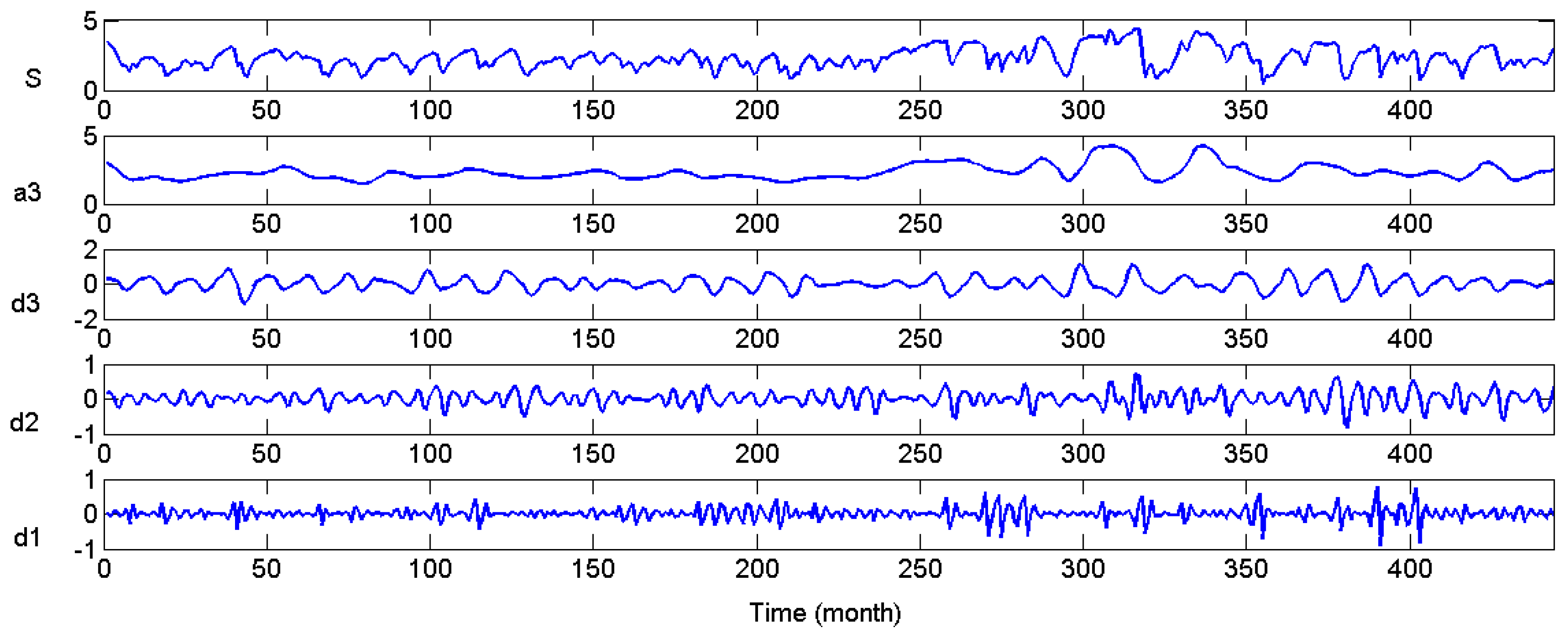
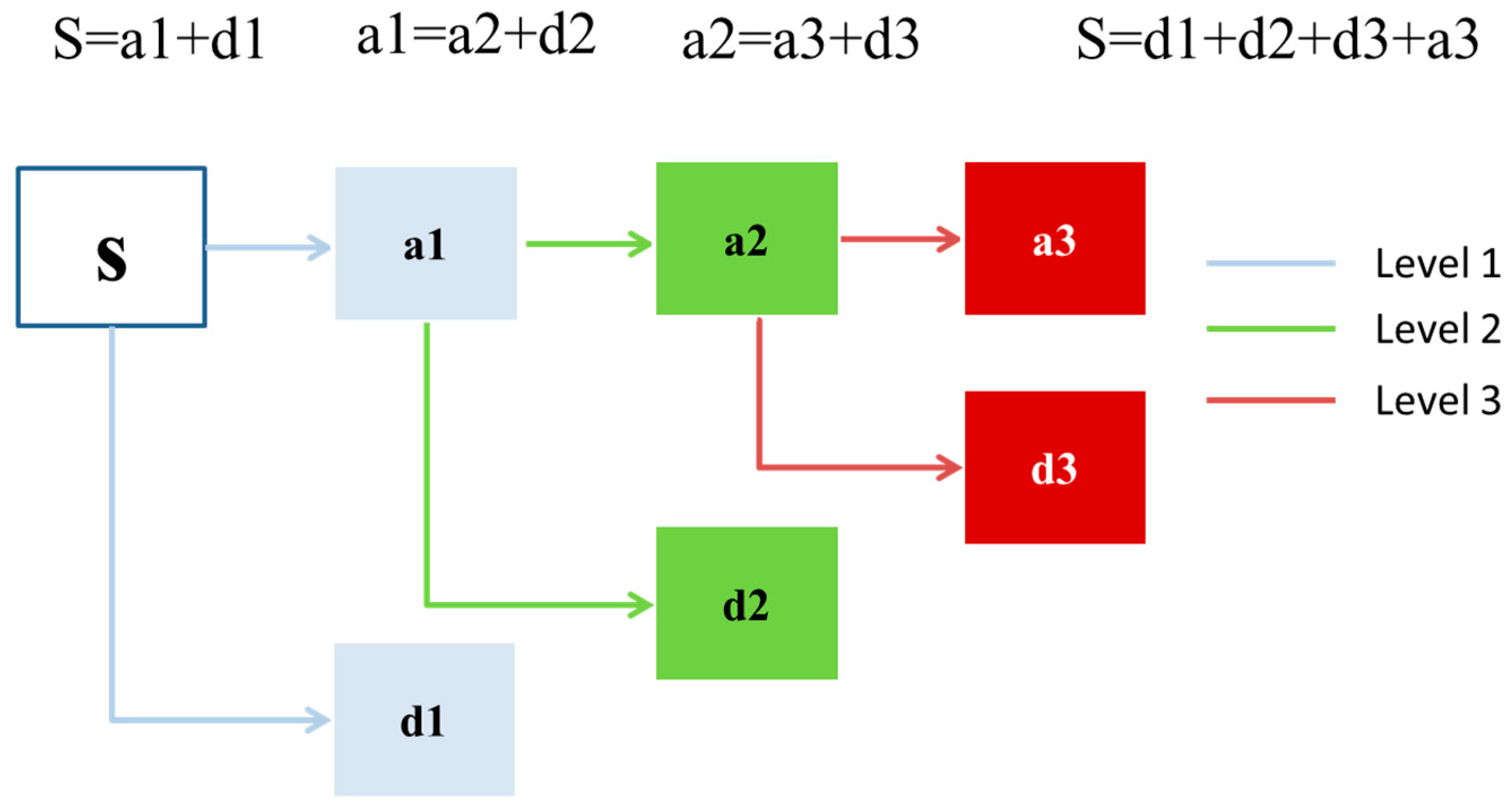
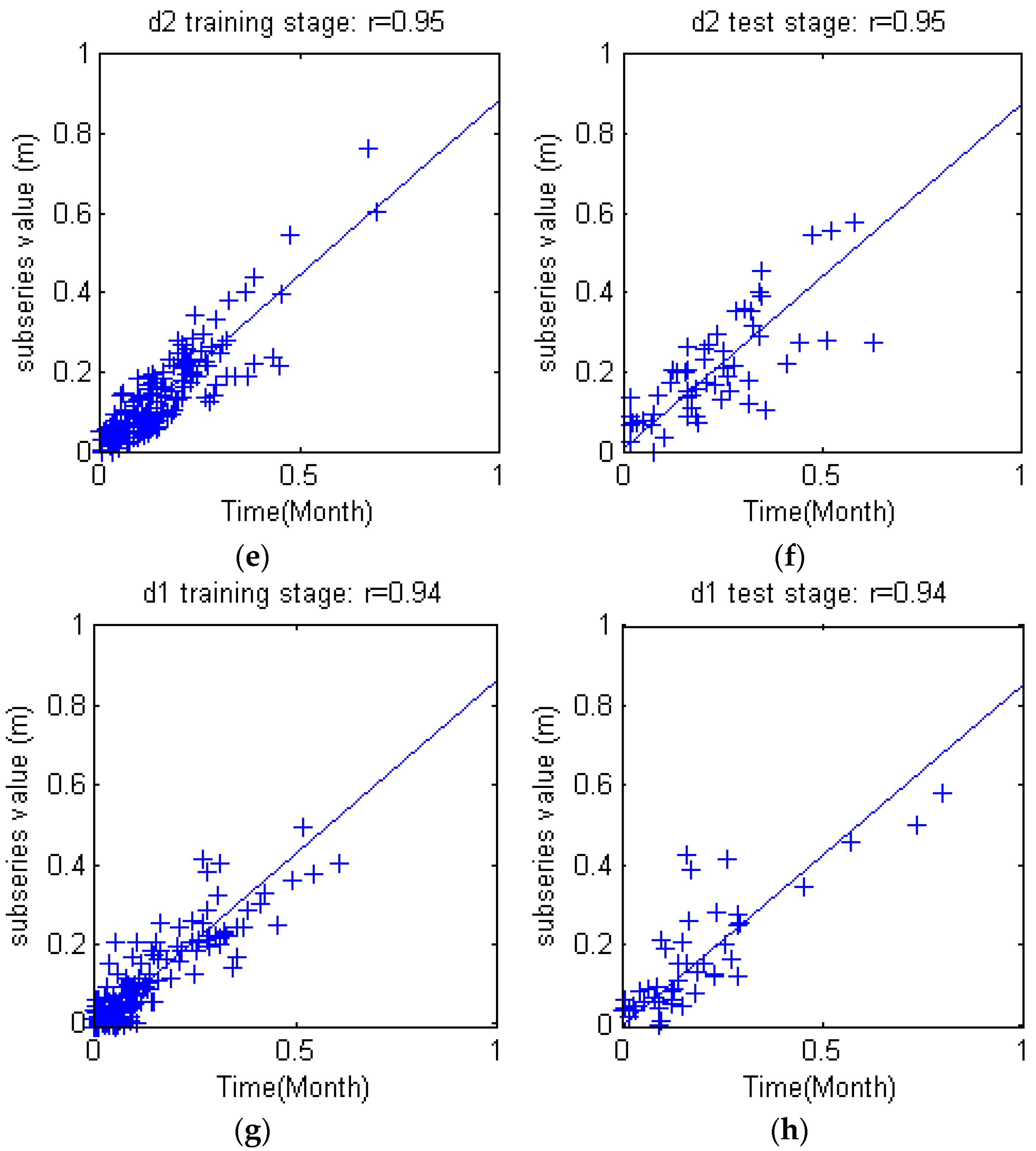
The three level DWT result is shown in
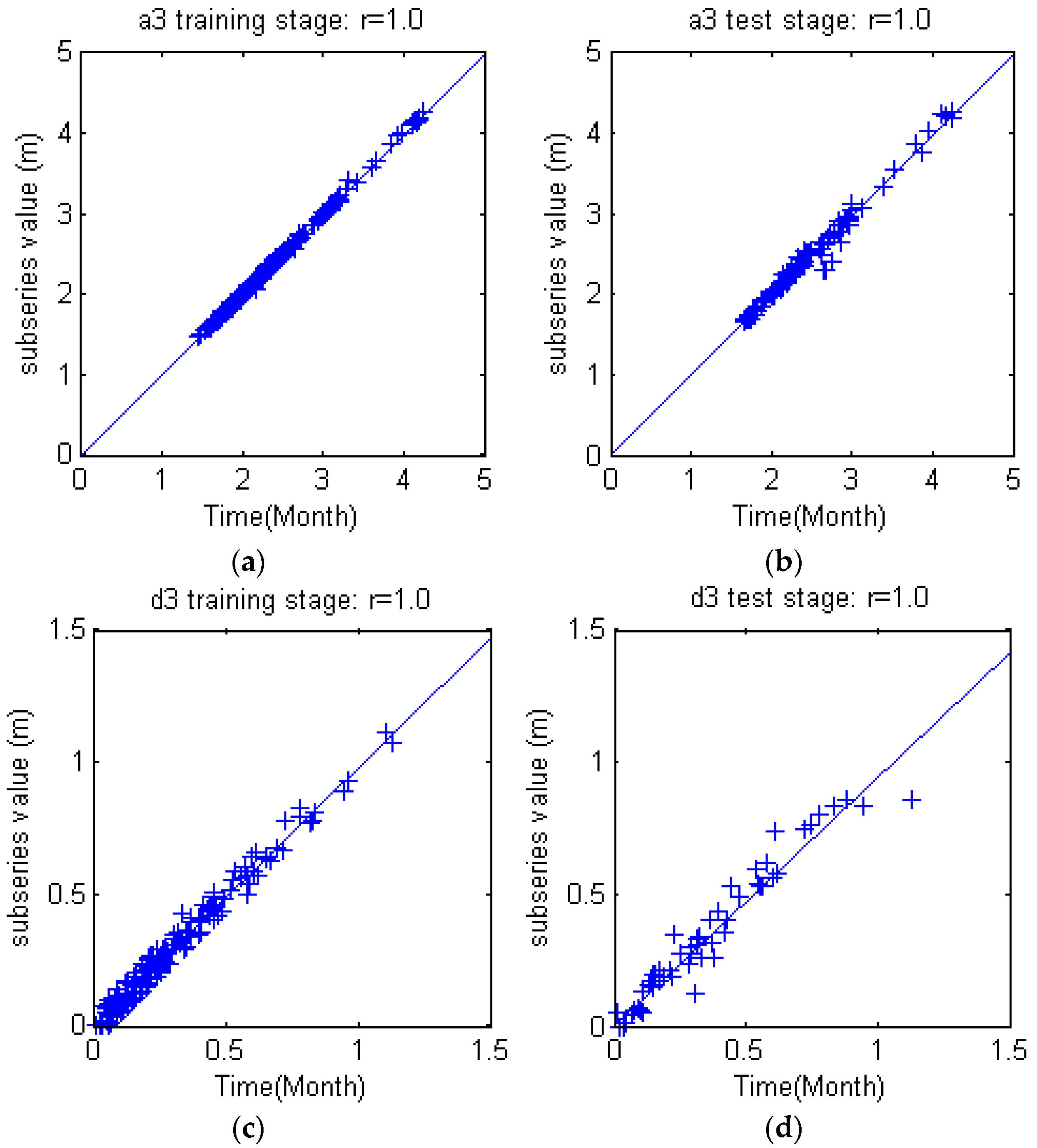
Figure 10. The three level DWT decomposed groundwater depth (S) into low frequency subset (a3) and three high frequency subsets (d1), (d2) and (d3). Obviously, S = a3 + d1 + d2 + d3. The subseries show apparent differences from each other, but the feature of each subseries are much more orderly and consistent, which will facilitate the rules derivation for each subseries.
3.6. Model Verification
Relative absolute error (RAE), Pearson’s correlation coefficient (
r), root mean square error (RMSE), and Nash-Sutcliffe efficiency (NSE) coefficient are employed as the performance evaluation criterion for comparison of ANN, SVM, WANN and WSVM models, as follows:
where
and
denote actual and estimated value of groundwater depth in time step
i, respectively;
and
denote mean value of the actual and estimated value of groundwater depth in time step
i, respectively;
n is the number of samples.
RAE takes the total absolute error and normalizes it by dividing by the total absolute error of the predictor. RAE ranges from 0 to ∞. In a perfect prediction, RAE is equal to 0; the numerator value increases with the increase of model prediction error.
The coefficient r measures the linear relationship between observation and estimation values. The coefficient r ranges from −1 to 1. A value of 1 or −1 implies that a linear equation describes the relationship between and perfectly. A value of 0 implies that there is no linear correlation between and .
RMSE is frequently used in measuring standard deviation of differences between estimated values and observed values. The closer the RMSE is to 0, the less deviation there is between estimations and observations.
NSE is a coefficient particularly used to assess the predictive power of hydrologic models. NSE values ranges from −∞ to 1. An efficiency of 1 is a perfect match of model predictions to the observations. An efficiency of 0 indicates that model predictions are as accurate as the mean of the observed data, whereas efficiency less than 0 means the residual variance exceeds the data variance. Essentially, models with NSE in the (0, 1) range are feasible, otherwise the model is usually considered infeasible for application.
The criterion RAE and
r can describe the aggregated fitting performance for all samples; while RMSE and NSE reflect the fluctuation of time series trend which focus more on the track of extreme values. By the criterions above, model performance can be characterized from different point view. However the premise of evaluation is that the training set and test set are assured to be representative [
40,
41]. In order to test the objectivity and stability of proposed model, more rounds of model procedures were carried out by exchanging and deleting the training and test samples. The stability test is applied on the best model, as discussed in
Section 4.3.2.
5. Conclusions
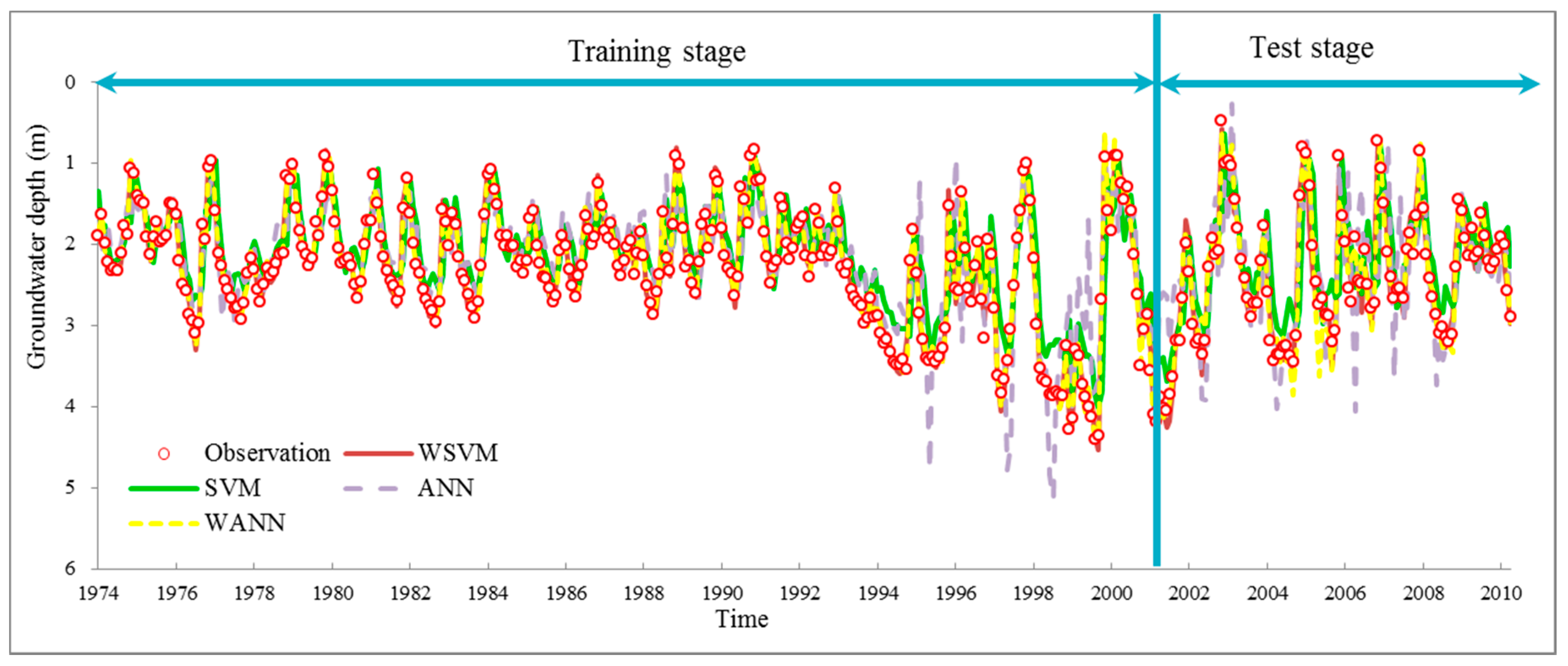
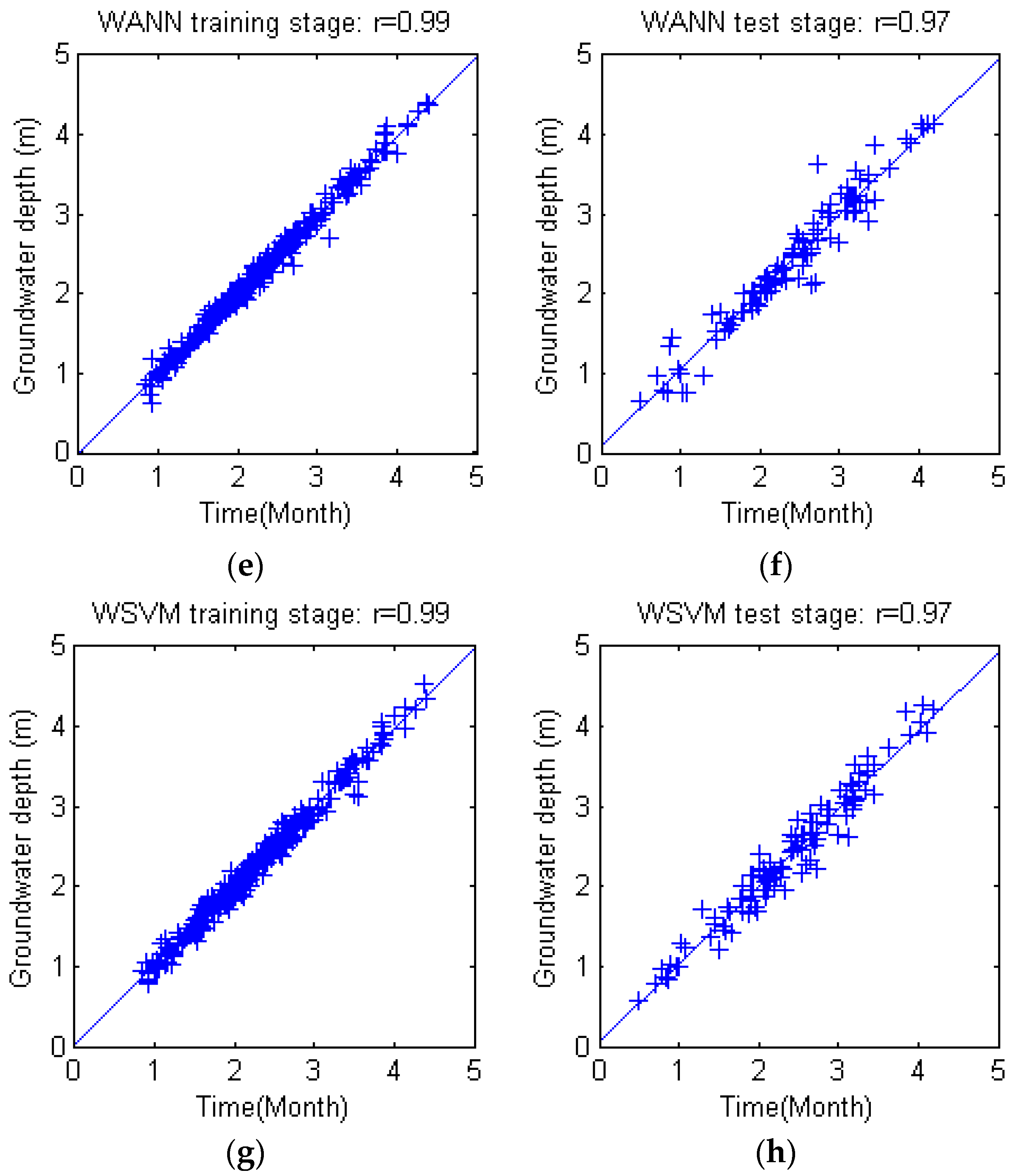
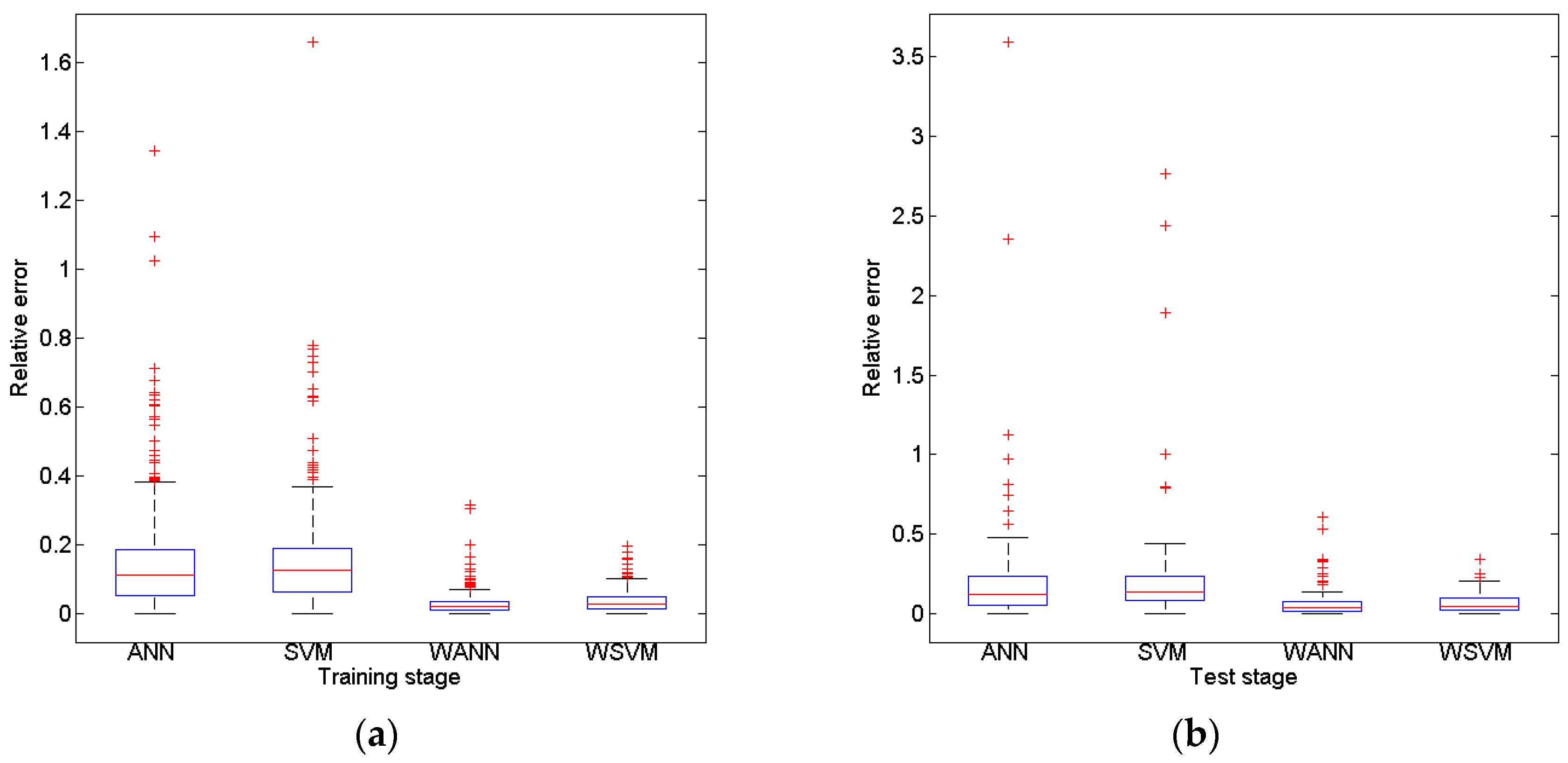
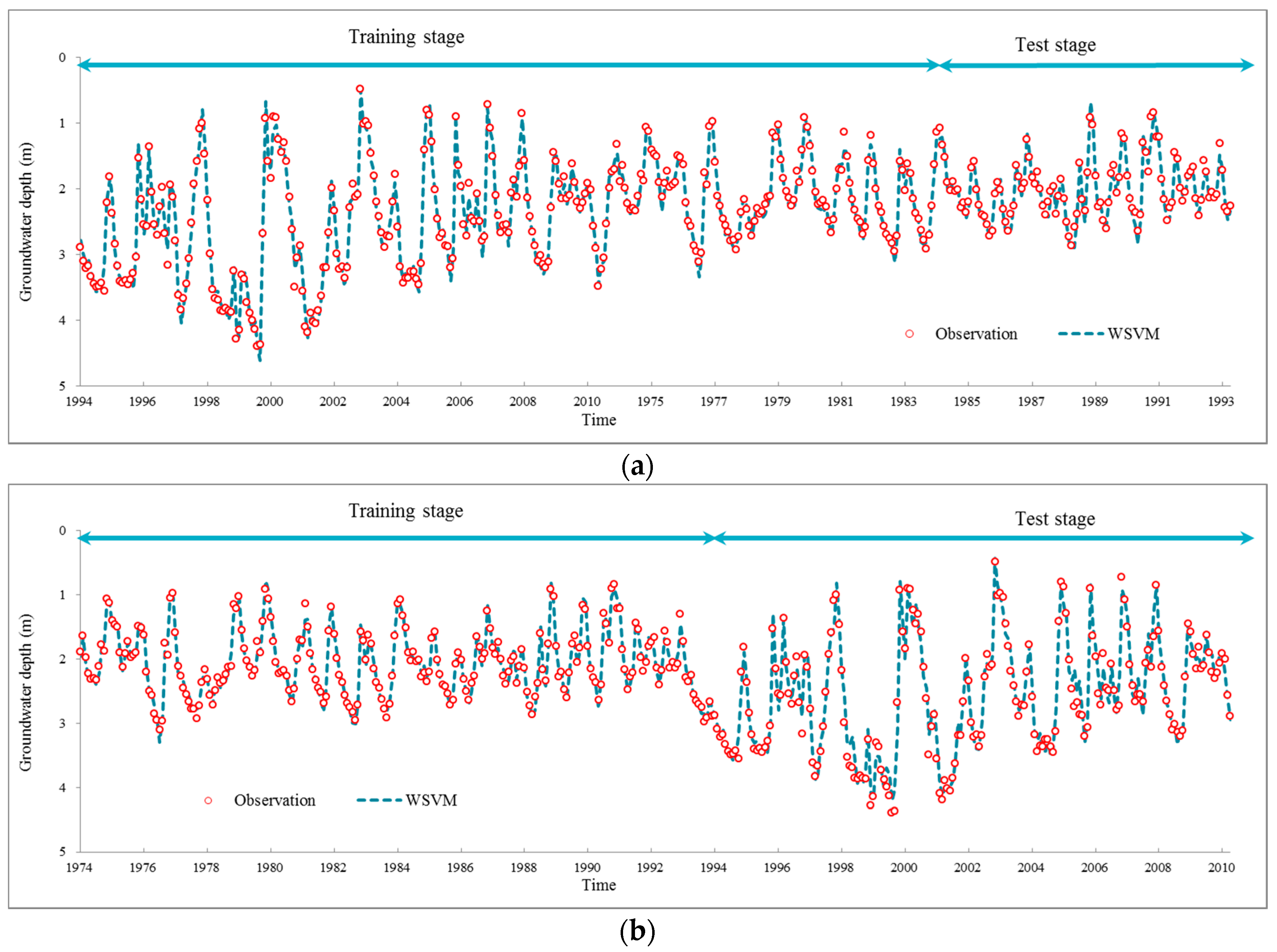
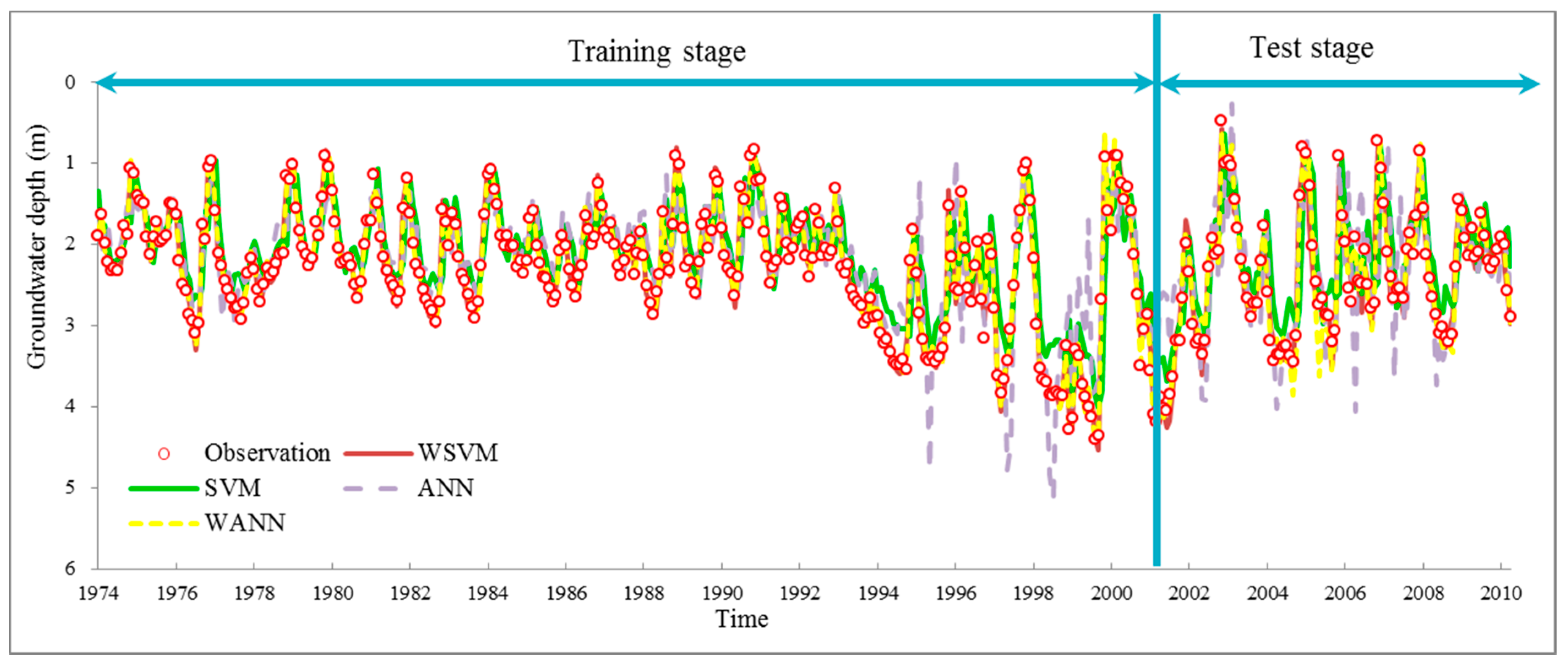
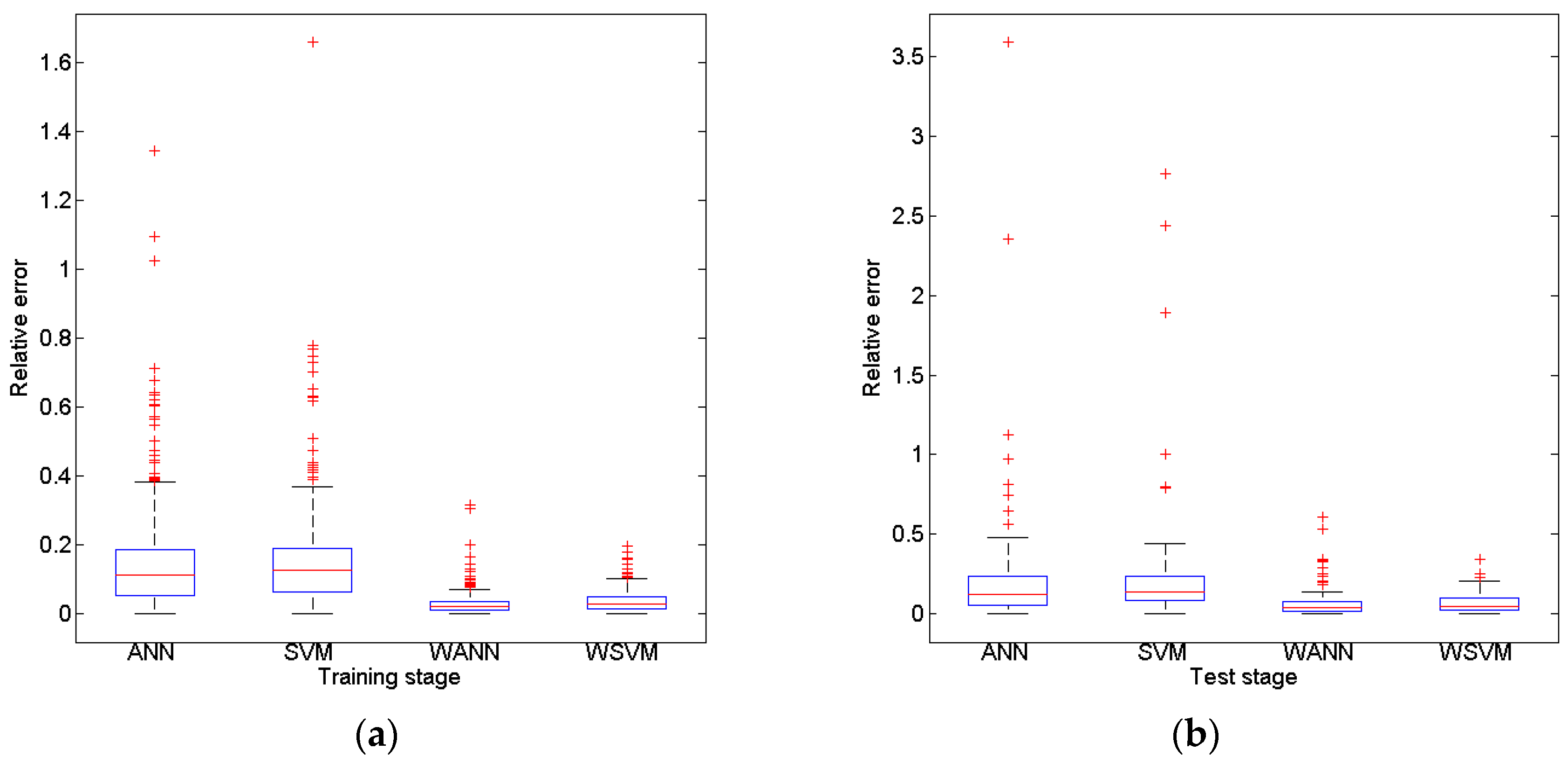
The potential of wavelet preprocessed Support Vector Machine (WSVM) model for monthly groundwater depth prediction during 1974 to 2010 in Mengcheng County were investigated in this study. The coupled WSVM model was developed by combining DWT and Support Vector Machine. The input variables lag times were derived from partial autocorrelation function of groundwater depth time series. A three level DWT is taken to preprocess and decompose the original groundwater level time series into four subseries with different frequencies. PSO based parameter calibration and 4 fold cross validation mechanisms were adopted into the hybrid WSVM model. The WSVM model was compared with ANN, SVM and WANN models using the same historic data. The WSVM model provided more accurate results. The RAE, r coefficient, RMSE and NSE were 0.10, 0.99, 0.095 and 0.98 in training stage and 0.20, 0.97, 0.18 and 0.94 in test stage, which largely bested the other models. WANN was close to WSVM models in some single coefficients but the relative error distribution demonstrated that the WSVM model has more stable performance. Through the use of three level DWT, the groundwater depth series was decomposed into four subseries with better stationary for model training. This facilitated the extraction of mainstream components thus significantly improved prediction performance.
By comprehensive comparisons of the four models and subseries of WSVM model, wavelet preprocessing helps provide quite good forecasts of monthly groundwater depth. The proposed hybrid model WSVM is a promising and practical method for monthly groundwater prediction. One possible future research from this study is developing multi lead time prediction models. Different from the one lead time prediction proposed in this study, the dilemma for multi lead time prediction might be how to deal with and avoid error accumulation of each time step. For rolling predictions, further lead time prediction is established on previous prediction; however, the previous prediction may probably have error which will mislead future prediction. Thus, the trade-off between information value and risk should be analyzed carefully.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}