Freshwater ecosystems offer a wide range of ecosystem services and contribute significantly to human well-being [
1]. Among these services, recreational activities like boating cover a major cultural aspect. However, these recreational boating activities can impact lake ecosystems: wave energy generated by boat traffic can contribute significantly to total wave energy and cause shoreline erosion, sediment resuspension [
2,
3], and the disturbance of aquatic habitats, thereby altering the ecological balance of these [
4,
5]. Despite these potential impacts, a comprehensive assessment of the ecological effects of waves generated by recreational boats remains limited due to an incomplete understanding of typical wave-induced processes in these systems. In addition, the distinction between wind-induced and vessel-induced waves is not comprehensively solved yet, making it difficult to accurately identify the source of these processes. This highlights the need for developing improved methods for monitoring and analyzing high-frequency wave activity. In particular, the provision of high-resolution data on wave patterns in recreational lakes is essential for the sustainable management of water ecosystems. Since the impact of waves caused by boating activities depends on the frequency of passing boats, boat and driving characteristics [
6,
7] as well as the bathymetry of the shore [
8], it is evident that monitoring wave exposure at a single point is insufficient, reinforcing the need for more comprehensive spatial approaches. To address this, we developed a portable monitoring system designed to assess multiple shoreline sections, specifically adapted to the typical wave characteristics induced by recreational boats. Those waves are characterized by wave heights (H) ranging from
m to
m [
7] and periods (T) between 1–3 s [
3,
9] in deep water. Those characteristics are crucial criteria for a suitable wave-monitoring system detecting recreation waves. To record waves between 0.04–0.28 m on a certain detail level, we expect a measurement accuracy of 1 cm and a recordable frequency range of 1–0.3 Hz for our monitoring system. Traditionally, wave monitoring has relied on buoys designed for maritime applications, where oceanic wave conditions differ substantially from those in lakes. These conventional wave buoys, while highly sophisticated, often come with high costs and are optimized for open-sea conditions, making them less suitable for small-scale, cost-sensitive lake monitoring. The financial investment required for a comprehensive monitoring system such as the one tested in this study, which incorporates eight wave-buoys, is often substantial and can act as a limiting factor for ecological monitoring projects. While there have been advancements in low-cost wave-monitoring technologies [
10,
11,
12,
13,
14], these solutions typically remain tailored for oceanic use, featuring large dimensions that hinder their portability and applicability for monitoring varying shore sections. Those large dimensions of the buoys often impede the detection of waves with periods lower than 1.7–2.5 s [
15], which is in the range of our wave spectrum of interest, the typical wave characteristics induced by recreational boats in deep water. Furthermore, measurement accuracies of those open-sea buoys are difficult to transfer, since calibration data is based on large wave heights (e.g., in following references [
16,
17] with significant wave heights of 0.4–1.8 m), which overtops substantially the waves of our interest (0.04–0.28 m). There are precise products with accuracies of 1.4 cm [
18], 2.57 cm [
19], 3.4 cm [
13], whereas deviations up to 6 cm [
20] or 10 cm [
16] would not allow evaluations of the recreational boat-waves of our interest. Recent innovations, such as those by the authors of [
15,
21,
22], demonstrate promising developments but still fall short of meeting the specific requirements for effectively monitoring boat-induced waves in lakes. It was shown that micro-electro-mechanical systems (MEMS)-based inertial measurement units (IMUs) are suitable for detecting short-frequency waves [
15,
23], in which we are especially interested regarding boat-induced waves. Combining this IMU technology with buoys, we extended a cost-effective buoy system for monitoring boat-induced waves in lake environments [
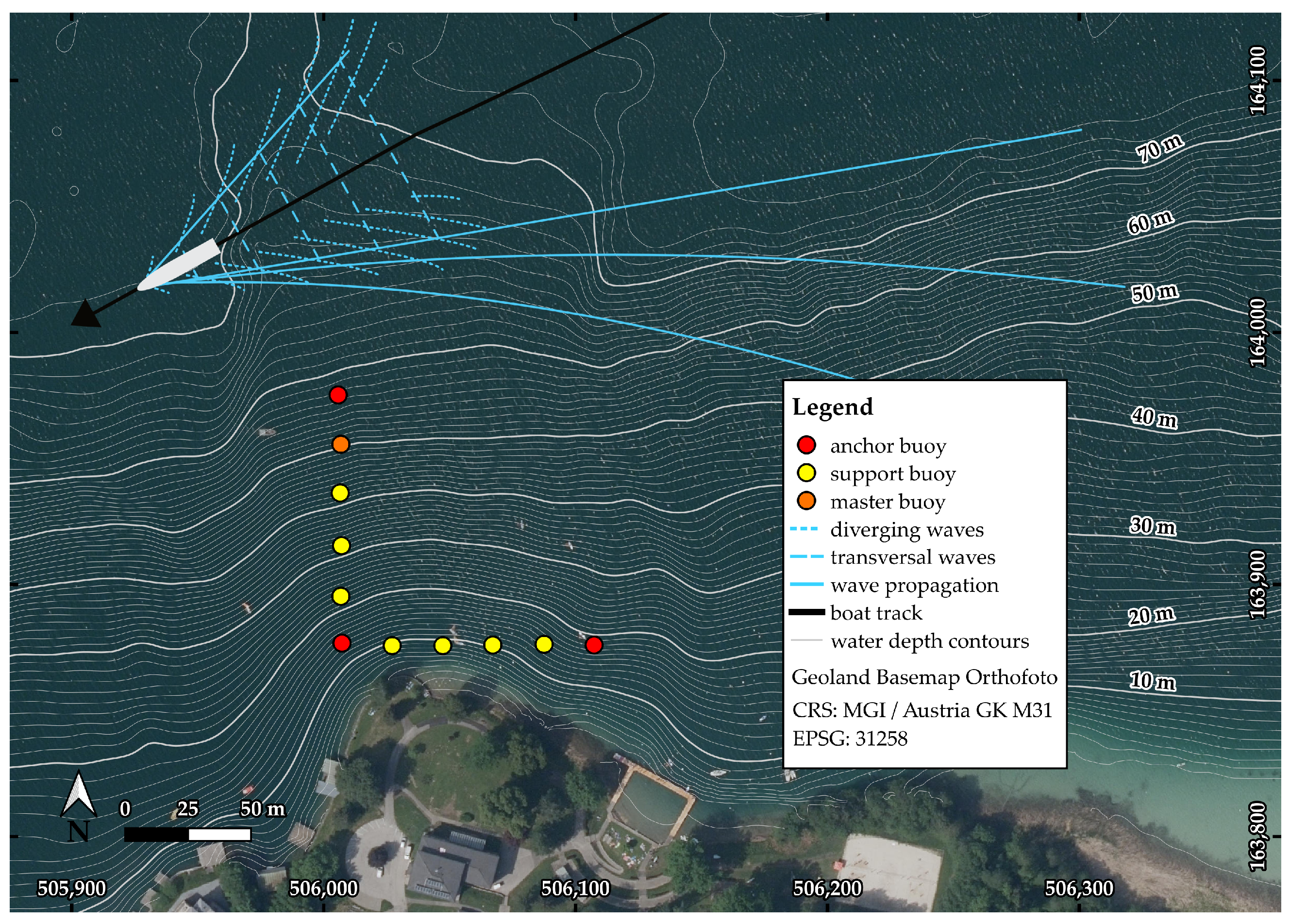
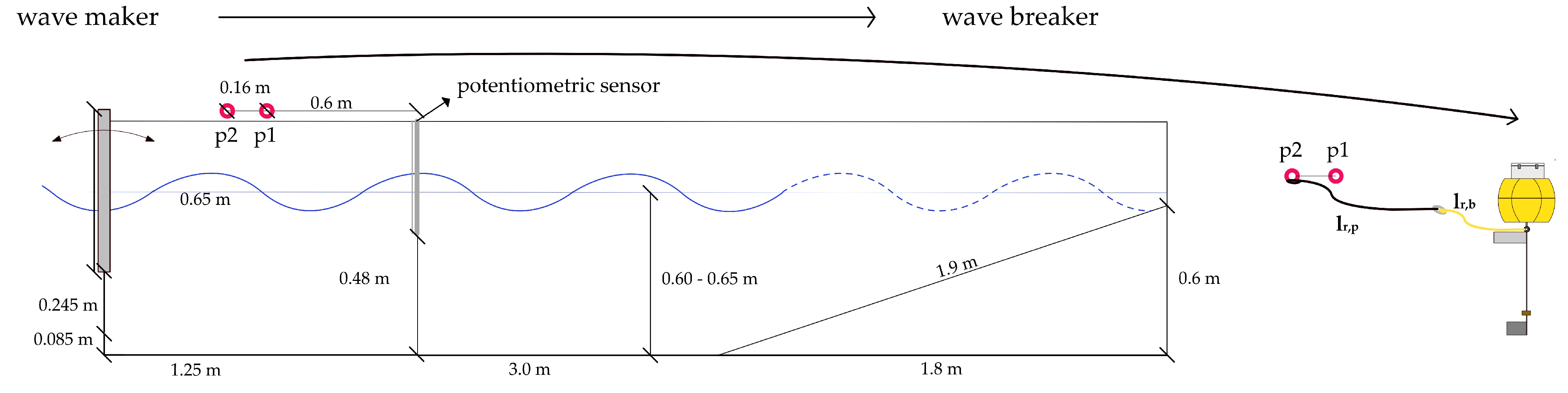
23], prioritizing affordability without sacrificing the accuracy of wave measurements. The given system architecture and test setup are based on the system described in Mascher and Berglez [
23]. The monitoring system consists of individual measurement units, which can be distinguished between a master buoy unit and a support buoy unit. Both types of buoys are attached to a connecting rope between the anchor buoys at a fixed position using a carabiner-equipped rope measuring 40 cm in length, allowing each buoy a free-floating radius of 40 cm. Each monitoring system is equipped with one master buoy. The support buoys are equipped with a single MEMS-based
Xsens DOT IMU (by Movella®, Henderson, NV, USA) sensor mounted on top. In contrast to the system developed by Mascher and Berglez [
23], the master buoy is significantly enhanced: in addition to the
Leica GRZ101 360 degree Mini Reflector and a
Xsens DOT, it integrates a single-board computer, a Global Navigation Satellite Systems (GNSS) receiver, and a SparkFun GPS-RTK Dead Reckoning module. These components enable continuous GNSS data collection, primarily serving as a precise time reference for synchronized data acquisition in this study. A key novelty of the system lies in the integration of Inertial Navigation System (INS) and GNSS data, which not only enables accurate measurements of wave heights through inertial sensors but also allows for compensation of horizontal buoy drift by incorporating previously unavailable attitude information into the processing framework. Drift correction can be performed in near real-time using the publicly available Galileo High Accuracy Service (HAS), offering the potential for significantly improved accuracy [
24]. Since the waves of interest have small amplitudes and periods, the requirements for measurement accuracy are stringent and are within 1 cm concerning wave height. Previous investigations of the tested wave-monitoring system have achieved an accuracy of the IMU integration in terms of averaged root mean square error (RMSE) between
and
cm [
23]. To enhance measurement precision, it is crucial to identify the sources of inaccuracies—whether they stem from the
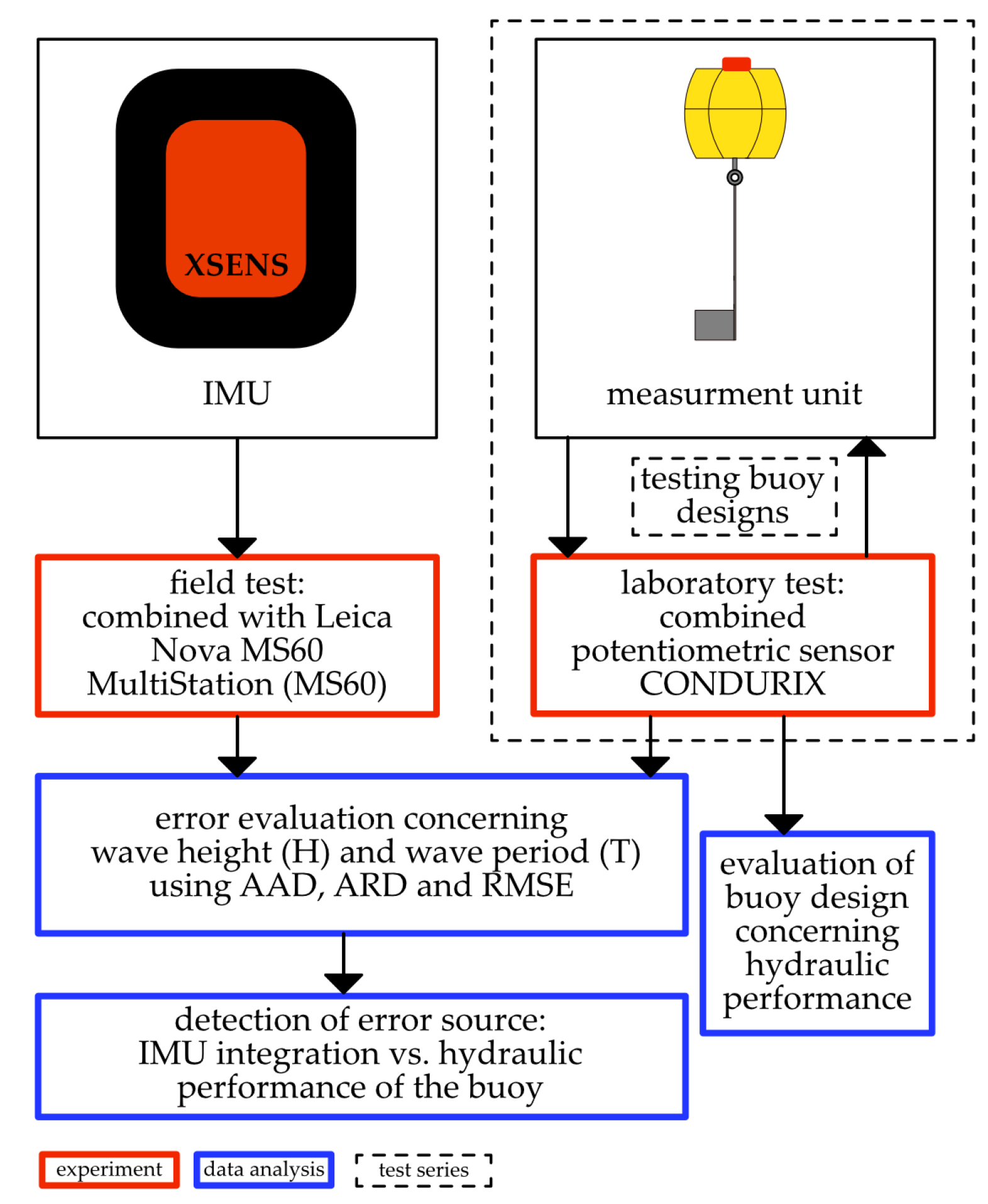
Xsens DOT IMU integration or the hydraulic performance of the buoys. We presume that an adapted algorithm for IMU integration combined with the improved hydraulic performance of the buoys can significantly contribute to the precision of the measurement system. To date, the development of specific buoy designs is rarely documented (e.g., in [
25,
26]), even though there are many publications about the hydraulic performance of wave-buoys [
10,
11,
12,
13,
14,
15,
21,
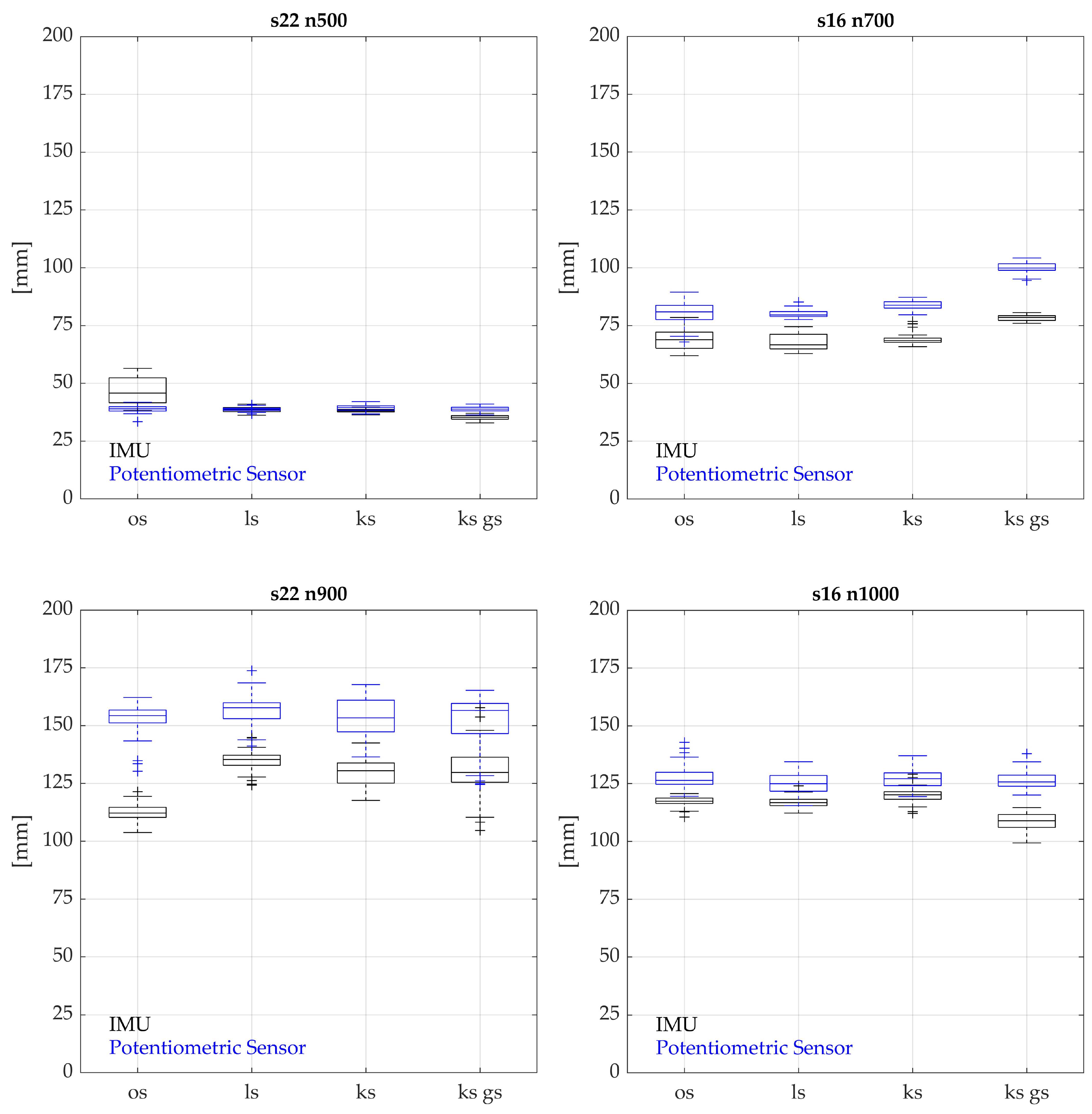
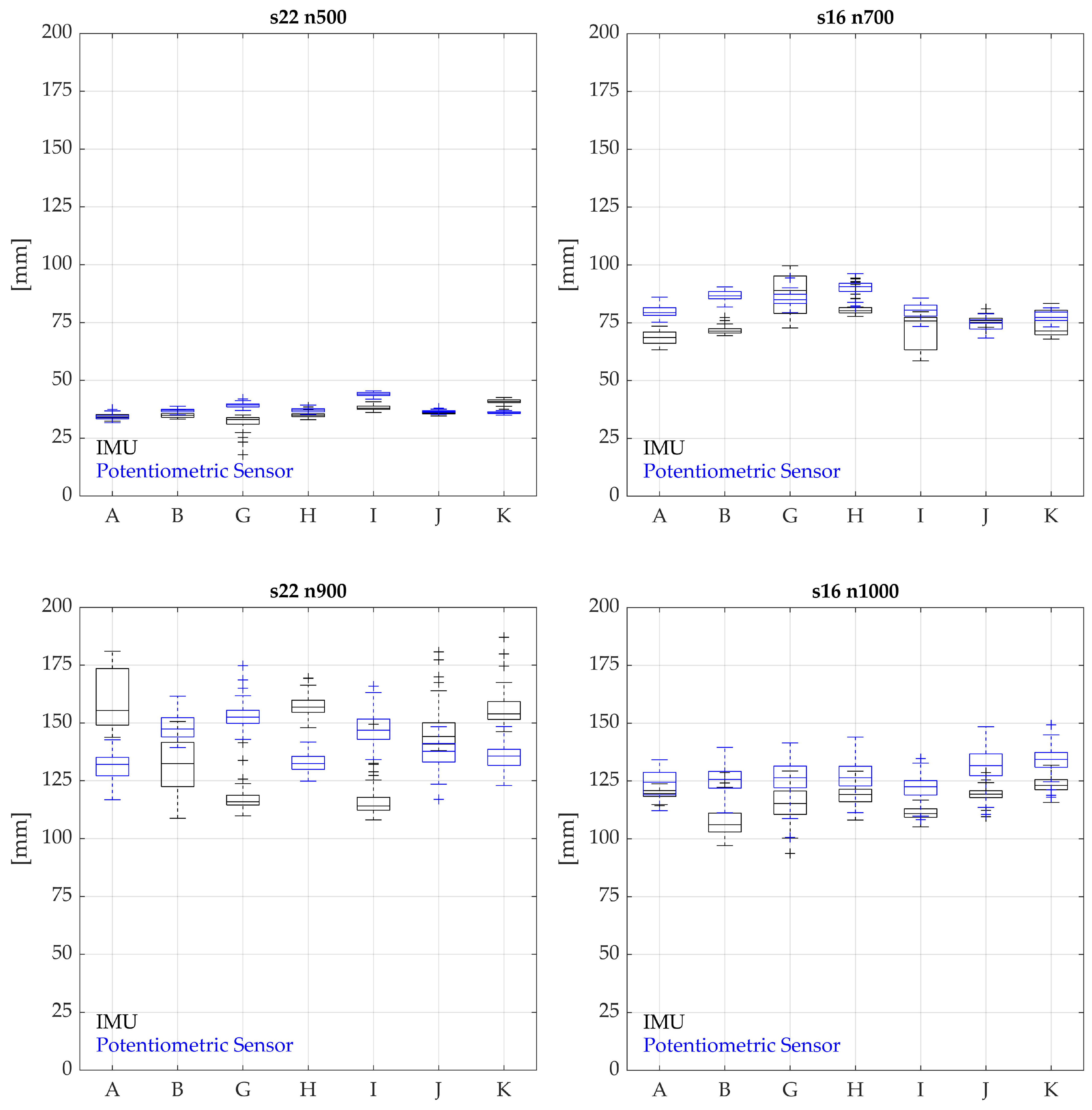
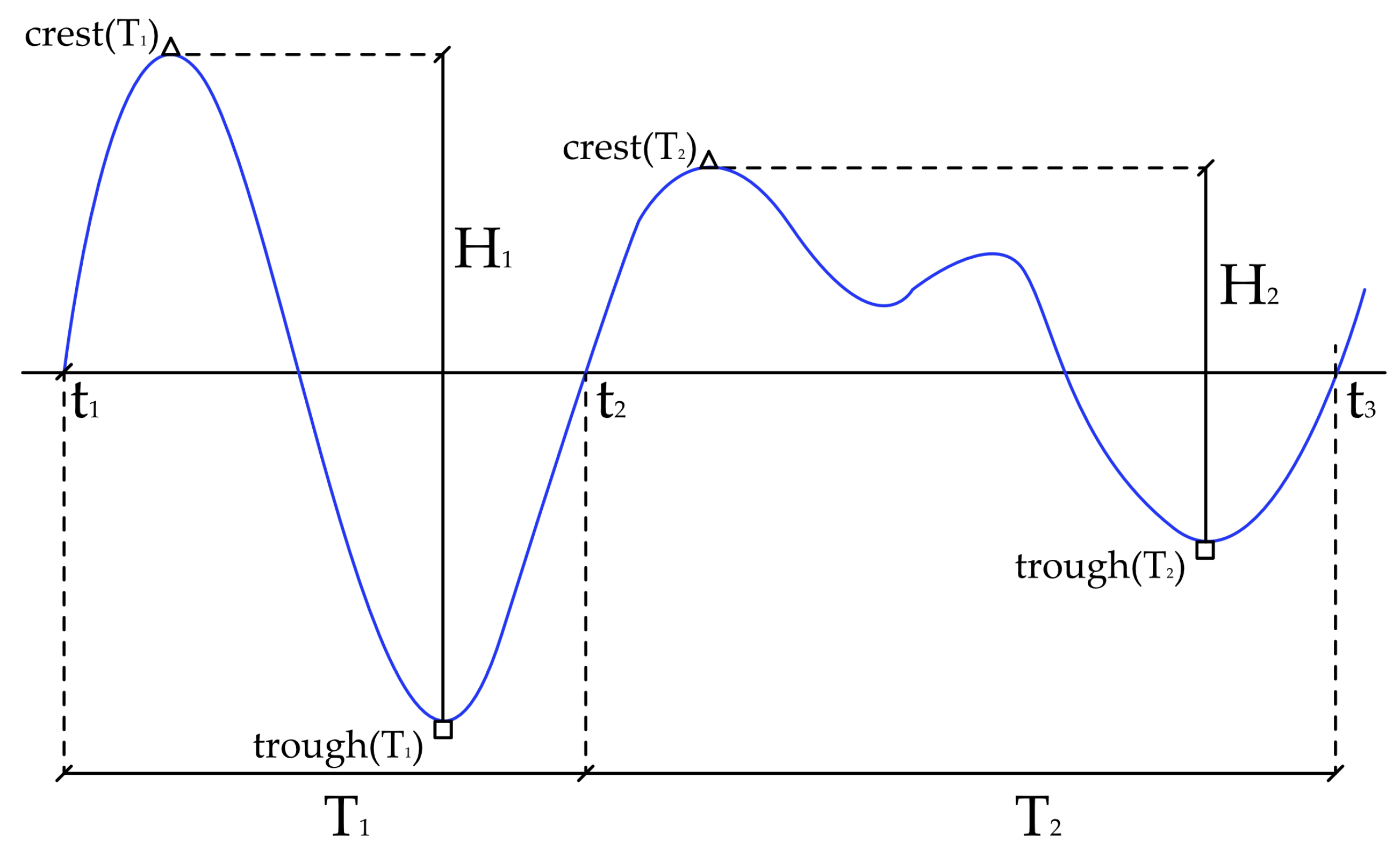
22]. Therefore, testing different buoys designs is needed to evaluate the potential for accuracy optimization. We aim to identify the sources of measurement uncertainties arising from both the buoy design and its hydrodynamic behavior, as well as the integration of the inertial measurement unit (IMU), by synthesizing findings from laboratory and field test campaigns. Furthermore, we hypothesize that the accuracy of our measurement system in wave height estimation can be <10 mm by selecting a buoy configuration tested for the best hydraulic performance.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}