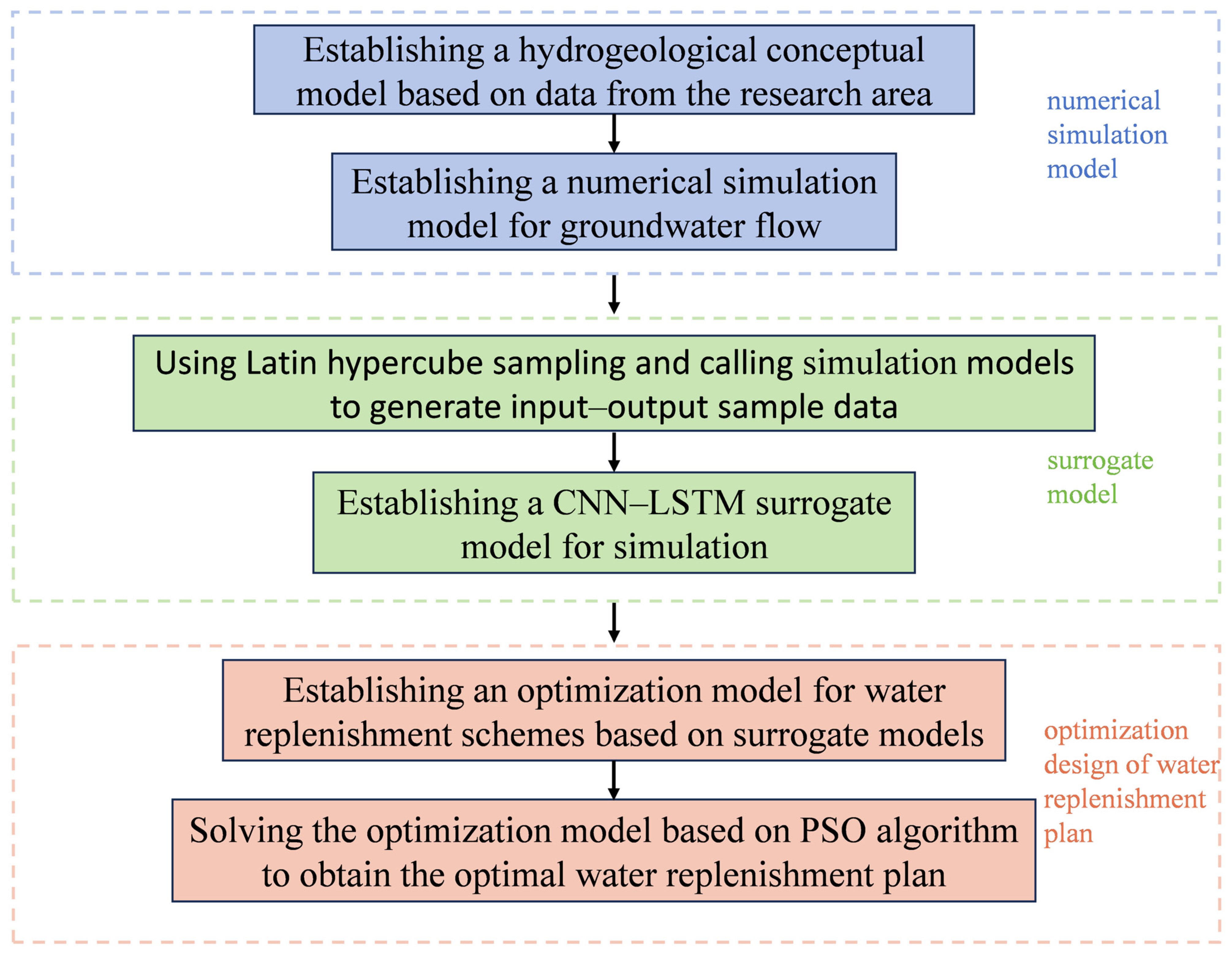
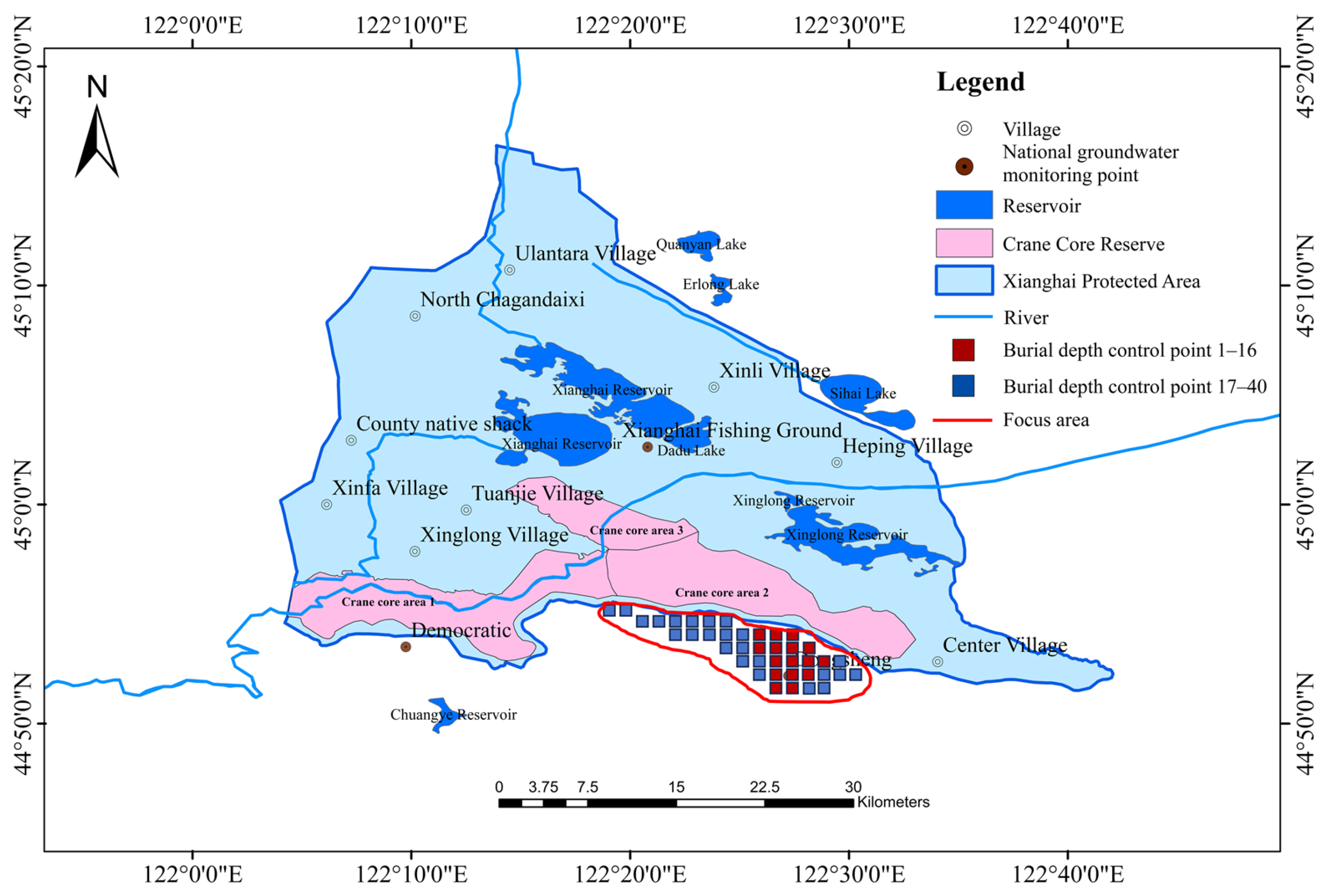
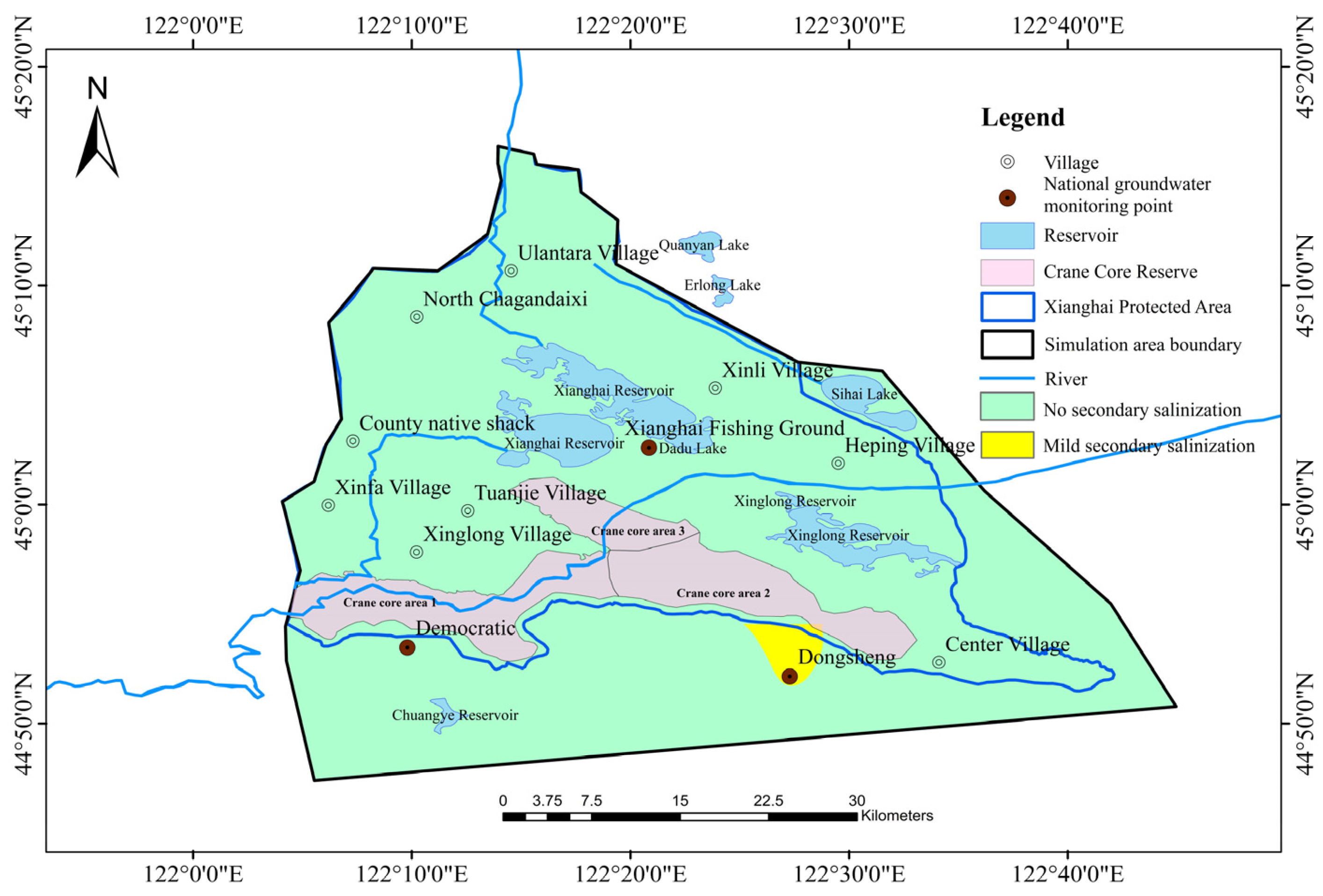
3.1. Study Area Overview
Located in Tongyu County, Baicheng City, in Northeast China, the Xianghai nature reserve is uniquely positioned in the heart of the vast Korqin Grassland. Its geographical coordinates range from 122°5′19″ to 122°31′38″ east longitude and 44°55′ to 45°09′ north latitude, covering an area of 1054 km
2. The overview of the study area is depicted in
Figure 3.
Xianghai nature reserve is an inland wetland and aquatic ecosystem type of nature reserve mainly aimed at protecting rare waterbirds like the red-crowned crane and valuable forest communities like the Mongolian elm. The primary responsibilities of the reserve include maintaining the wetlands and wetland ecosystems within the Korqin water system, Mutai River, Taoer River, and the Xianghai reservoir irrigation area, as well as the rich wildlife resources within the area. With the recent implementation of water supply projects, the reserve has established good engineering replenishment conditions. However, with the annual decrease in rainfall within the Taoer River basin in recent years, the deterioration of underlying surface conditions, and the lack of guaranteed upstream water supply, the water surface and swamp wetland area of the Xianghai reserve have gradually shrunk, with the wetland area having decreased by more than half. This poses a severe threat to the biodiversity of the reserve. Currently, the ecological water demand in the core area of the reserve exceeds the local water resources and the supply capacity of existing projects. To ensure sustainable development of the reserve, it is necessary to replenish water to the reserve. The monthly precipitation and evaporation in the study area are presented in
Figure 4.
Replenishment can lead to an increase in the water table of the aquifer, reducing its burial depth, which, in turn, causes salinization. The formation and distribution of groundwater in the study area are governed by complex geological structures and natural factors. Prolonged sedimentation has produced thick sequences of clastic rocks and Quaternary unconsolidated deposits, facilitating groundwater storage. The main confined aquifers include the Upper Tertiary Da’an Formation (120–160 m depth), composed of gravelly mudstone and sandstone, and the Taikang Formation (45–90 m depth), characterized by highly permeable basal fine sandstone. Both formations are confined by interbedded mudstone aquitards. The Lower Pleistocene Baitushan Formation (24–80 m depth), dominated by gravel and sand layers, exhibits strong permeability and significant groundwater accumulation capacity. Unconfined groundwater within the Middle to Upper Pleistocene Quaternary deposits is extensively distributed, mainly stored in loess-like sandy silt and fine sand layers of the Upper Pleistocene Guxiangtun Formation. Despite its fine-grained texture, the formation remains loosely compacted, ensuring moderate permeability. This provides stable geological conditions for the formation and storage of unconfined groundwater, forming an aquifer with certain water supply potential. This study primarily focuses on the Quaternary pore aquifer, as the impact on the receiving area is predominantly observed in the unconfined aquifer, with minimal influence on the confined aquifer. The primary sources of groundwater recharge include precipitation infiltration, surface water infiltration, and lateral subsurface runoff, with the main discharge through evapotranspiration and lateral runoff. Overall, the groundwater exhibits a west-to-east flow trend, with a hydraulic gradient of approximately 1‰.
This article takes the Xianghai nature reserve as a case study area, proposing to replenish water in Crane Zones 2 and 3 from April to September each year over a period of 10 years. April-September was selected as the replenishment period because Xianghai serves as a reserve for cranes, and crane flocks only inhabit Xianghai from April to September. After September, the crane flocks begin to migrate southward, returning to Xianghai in April of the following year. Additionally, this period coincides with a period of high ecological activity, during which the ecosystem’s demand for water is relatively high. Replenishing water during this time can better meet the ecosystem’s needs, promoting ecosystem recovery and development.
As the replenishment progresses, the wetland area within the water-receiving zones will gradually expand. The soil in these wetlands will constantly maintain a certain layer of water. The movement of soil water and salt is predominantly downward. During the infiltration process, this water will leach the soil salts, diluting them and, thus reducing the soil salinity. The groundwater level around the water-receiving areas will rise. In the water-receiving areas (Crane Zones 2 and 3), the northern, western, and eastern sides predominantly consist of wetlands and reservoirs within the protected area, the surface will maintain a certain layer of water, and the groundwater movement will mainly be downward, making the leaching effect on soil salinity, not causing salinization. However, on the southern side of the water-receiving areas, in non-water areas, the elevated groundwater level under strong evaporation will increase the salt content in the soil surface, creating conditions for secondary salinization. Therefore, the focus is on the salinization issue on the southern side of the water-receiving areas. There are many factors contributing to soil salinization. For the receiving area, the main factor affecting changes before and after water replenishment is the burial depth of groundwater. Therefore, the primary consideration is the impact of groundwater depth on soil salinization.
To achieve the maximum total replenishment volume for the study area while maintaining a low degree of secondary salinization in the focus area after ten years of water replenishment, the replenishment is carried out up to the maximum available water capacity. First, the maximum available water supply is selected to predict the water supplementation for zones 2 and 3 of the crane habitat. To control the extent of salinization, the area of concern is defined as the region where the groundwater depth on the southern side of the water-receiving area is less than 2.5 m after 10 years of supplementation with the maximum available water supply. By setting depth control points in the focus area, where salinization is likely to occur, the groundwater depth after replenishment is controlled, thereby controlling the occurrence of salinization. The distribution of the focus area and depth control points is shown in
Figure 5.
3.2. Construction of the Numerical Simulation Model
This study expanded the simulation area beyond the core of the protection zone, covering a region of approximately 1673.4 km
2 (as shown in
Figure 6). The target layer for this simulation calculation is the Quaternary unconsolidated rock porous phreatic aquifer. The water table in the research area is relatively flat, and the water flow is essentially horizontal, which allows for the vertical component of the seepage velocity to be ignored. Consequently, the flow is generalized as two-dimensional. The inputs and outputs of the groundwater system are influenced by precipitation infiltration, surface water infiltration, lateral subsurface runoff, evapotranspiration and extraction across different spatial and temporal scales. The groundwater level varies over time, and the groundwater flow is characterized by non-steady flow. The aquifer parameters do not vary significantly across space and are generalized as homogeneous. There is no significant directionality in the parameters, which can be generalized as isotropic. Summarizing the above, the groundwater flow system in the research area can be generalized as a homogeneous, isotropic, unsteady two-dimensional groundwater flow system. The calculation of source and sink terms is shown in Equations (13)–(17), where the precipitation infiltration recharge intensity and phreatic evaporation intensity are determined by the monthly precipitation and evaporation within the study area. These data are applied for a 10-year simulation period.
The calculation formula for precipitation infiltration recharge intensity is expressed as:
where
represents the precipitation infiltration recharge intensity (m/d);
is the precipitation infiltration coefficient;
is the total precipitation within the study area (m); and
represents the calculation period in days (d).
The infiltration recharge intensity from rivers and lakes to groundwater can be expressed as:
where
is the infiltration recharge intensity from rivers and lakes (m/d);
is the hydraulic conductivity of riverbed or lakebed sediments (m/d);
is the water level of the river or lake (m);
is the groundwater level (m); and
represents the thickness of riverbed or lakebed sediments (m).
The calculation formula for phreatic evaporation intensity is given as:
where
represents the phreatic evaporation intensity (m/d);
is the phreatic evaporation coefficient;
is the total phreatic evaporation within the study area (m); and
is the calculation period in days (d).
The lateral recharge and discharge of groundwater along boundary zones can be estimated using Darcy’s Law, expressed as:
where
represents the lateral groundwater recharge or discharge (m
3);
is the hydraulic conductivity of the aquifer (m/d);
is the hydraulic gradient of groundwater;
is the aquifer thickness (m);
is the width of the cross-sectional flow area (m);
is the computation time step (d); and
accounts for the angle between the groundwater flow direction and the cross-sectional boundary.
The groundwater extraction intensity is calculated as follows:
where
represents the groundwater extraction intensity (m);
is the total groundwater extraction volume (m
3); and
is the area of the extraction region (m
2).
The upper boundary of the simulation area is the groundwater surface, a continually changing boundary for water exchange, including precipitation infiltration and evapotranspiration across. The bottom boundary of the simulation area is the impermeable mudstone layer, generalized as a no-flow boundary. The western part of the simulation area is the lateral inflow boundary, and the northeastern side is the lateral outflow boundary, both generalized as known flow boundaries. The southern boundary is parallel to the flow lines and generalized as a no-flow boundary.
According to the available hydrogeological data, the initial values of hydrogeological parameters are determined as shown in
Table 1.
Based on the hydrogeological conceptual model, the homogeneous, isotropic, and unsteady two-dimensional groundwater flow system can be described by the following partial differential equation and its boundary conditions:
where
is the groundwater level;
is the initial water level;
is the elevation of the target aquifer floor;
is the permeability coefficient;
is the specific yield;
is the vertical recharge and discharge intensity of the phreatic aquifer;
is the known flow boundary;
is the lateral single width displacement of the aquifer;
is the impermeable boundary;
is the direction of the outer normal on the boundary; and
is the simulation calculation area.
Utilizing the MODFLOW module within GMS software, the aforementioned mathematical model is solved. In the simulation computation area, a rectangular partition is employed, dividing the area into 1784 finite difference grids, with each cell measuring 1000 m × 1000 m. The simulation spans 10 years and is discretized into 200-time steps.
In this study, a local sensitivity analysis method was employed to identify the parameters that have a significant impact on the model outputs. Local sensitivity analysis is used to investigate the influence of variations in individual parameters on the results of numerical simulations. During the analysis, only the parameter under investigation is varied, while all other parameters are kept constant. The main advantages of this approach are its simplicity and ease of implementation, as well as the preservation of computational accuracy. The corresponding formula is as follows:
where
denotes the sensitivity coefficient, which quantifies the influence of changes in parameter
on the model output
.
When calculating the sensitivity coefficient for parameter
, all other parameters are kept constant. The value of parameter
is changed from
to
, resulting in a change in the dependent variable from
to
. The sensitivity coefficient is then computed using the following equation:
Equation (21) is the calculation formula without considering units.
The parameters involved in this sensitivity analysis are the hydraulic conductivity
, specific yield
, and atmospheric precipitation infiltration coefficient
. The values of these three parameters are listed in
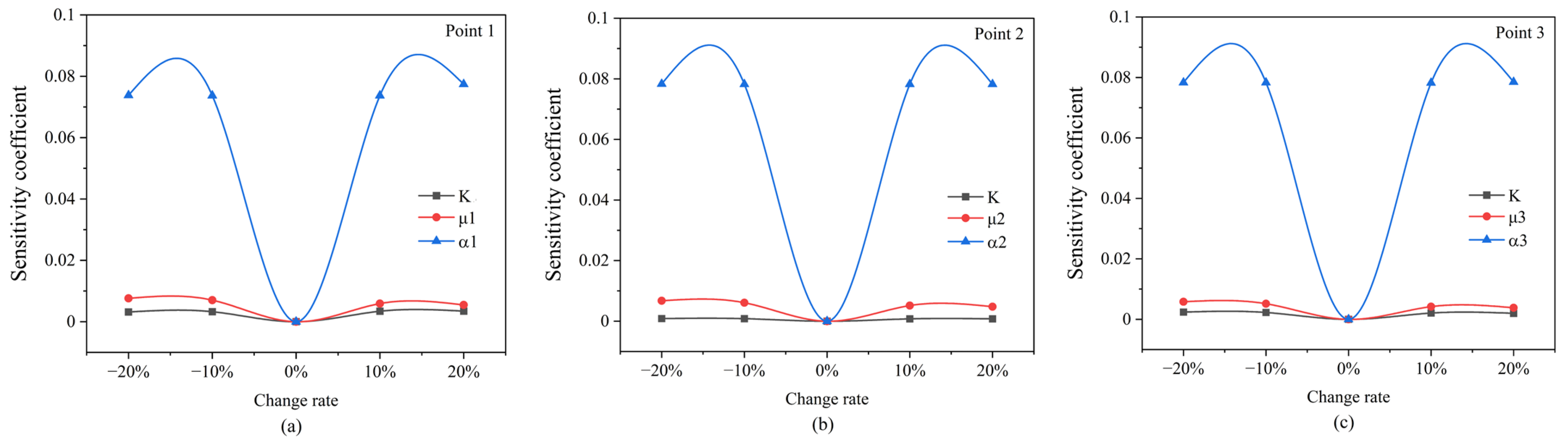
Table 1. Each parameter was individually increased and decreased by 10% and 20%. Three representative groundwater burial depth control points (
Figure 7) were selected from the focus area, corresponding to the westernmost (Point 1), easternmost (Point 2), and southernmost (Point 3) locations. Using Equation (21), the sensitivity analysis was conducted with the groundwater table at three control points after 10 years of recharge as the output variable. The results of the sensitivity analysis are presented in
Table 2 and
Figure 8.
As shown in
Figure 8, the results of the local sensitivity analysis indicate that for all three control points, the atmospheric precipitation infiltration coefficient
is the most influential parameter.
To ensure mesh independence and the reliability of the model results, sensitivity analyses on different mesh sizes were conducted. Specifically, grid resolutions of 500 m × 500 m, 1000 m × 1000 m, and 1500 m × 1500 m were tested under identical boundary and initial conditions. The groundwater levels at key monitoring points after ten years of simulation were compared for these mesh configurations. Using the 500 m × 500 m grid as the reference, the relative differences in groundwater levels for the other mesh sizes are presented in
Table 3.
The results show that the relative differences between the 500 m × 500 m and 1000 m × 1000 m grids were less than 0.5%, indicating negligible sensitivity to grid resolution refinement. However, increasing the mesh size to 1500 m × 1500 m introduced deviations exceeding 0.5%, suggesting insufficient accuracy at this scale. Therefore, a grid resolution of 1000 m × 1000 m was selected as mesh independent and used consistently throughout this study.
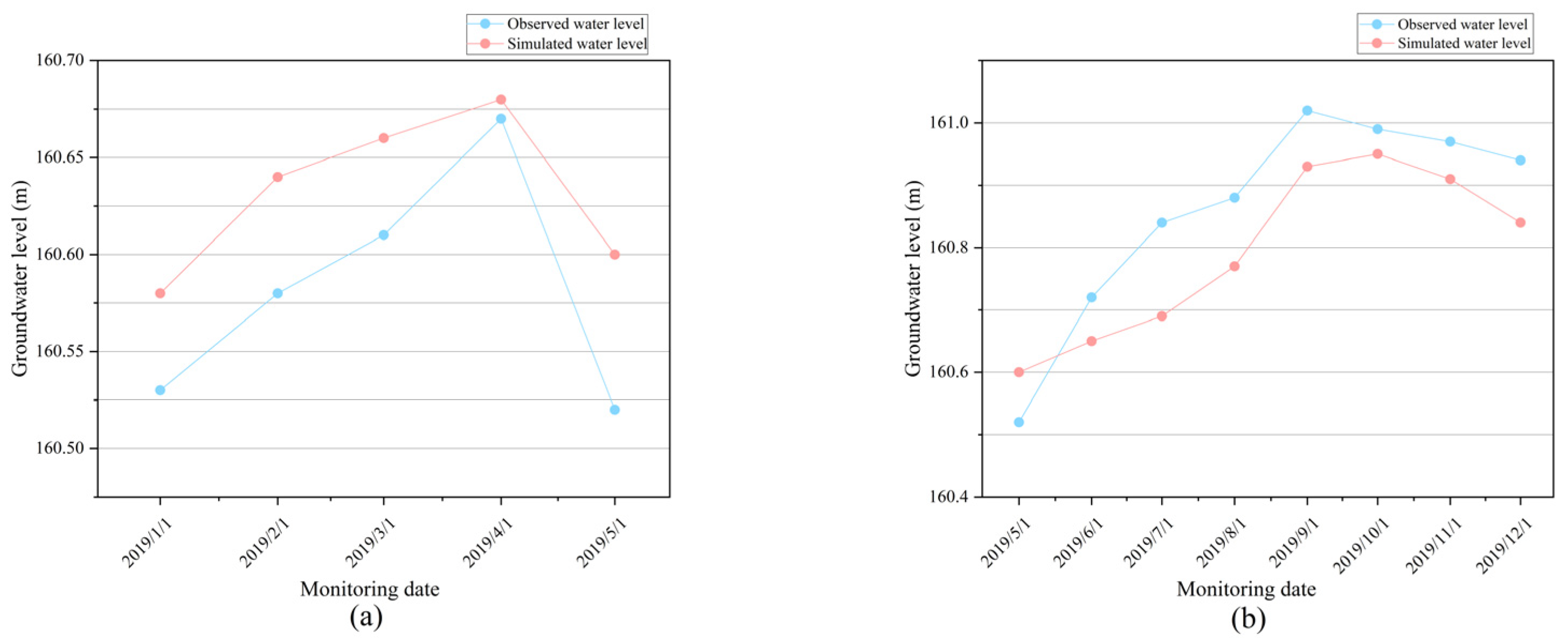
Based on the results of the local sensitivity analysis, this study utilizes the existing water level monitoring data to identify model parameters and verify model reliability. The identification period is from 1 January 2019 to 1 May 2019, and the validation period is from 1 May 2019 to 1 December 2019. The water level fitting results of the monitoring wells during the identification and verification periods are shown in
Figure 9,
Figure 10 and
Figure 11 below. The hydrogeological parameters identified and validated are as shown in
Table 4.
From the water level fittings in
Figure 9,
Figure 10 and
Figure 11, it can be observed that the overall fit between the modeled water level results during the identification and verification periods and the actual measured results is quite high. Additionally, the dynamic fitting of the monitoring points illustrates that the deviation between the measured and simulated water levels at the monitoring points is less than 0.2 m, and their dynamic trends are generally consistent. In summary, the established simulation model reliably simulates hydrogeological conditions and groundwater flow fields.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}