

Comparison of Methods Predicting Advance Time in Furrow Irrigation




Abstract
1. Introduction
2. Materials and Methods
2.1. Philip and Farrell Method [8]
- Step 1:
- Enter the values of the parameters q0, A, S and tL into an Excel worksheet. The value tL = 5A0L/q0 can be used as an initial value of tL, where A0 is the wetted cross-sectional area of a furrow.
- Step 2:
- In a new cell, calculate the f(tL) using Equation (5).
- Step 3:
- Go to the tools menu and click the Solver tool.
- Step 4:
- In “set objective”, set the cell created in step 2, then set it to receive the value zero according to Equation (5), and set the cell containing the value of tL as the Solver optimization variable. GRG nonlinear is chosen as the solution method.
- Step 5:
- Press OK and obtain an optimal value of tL.
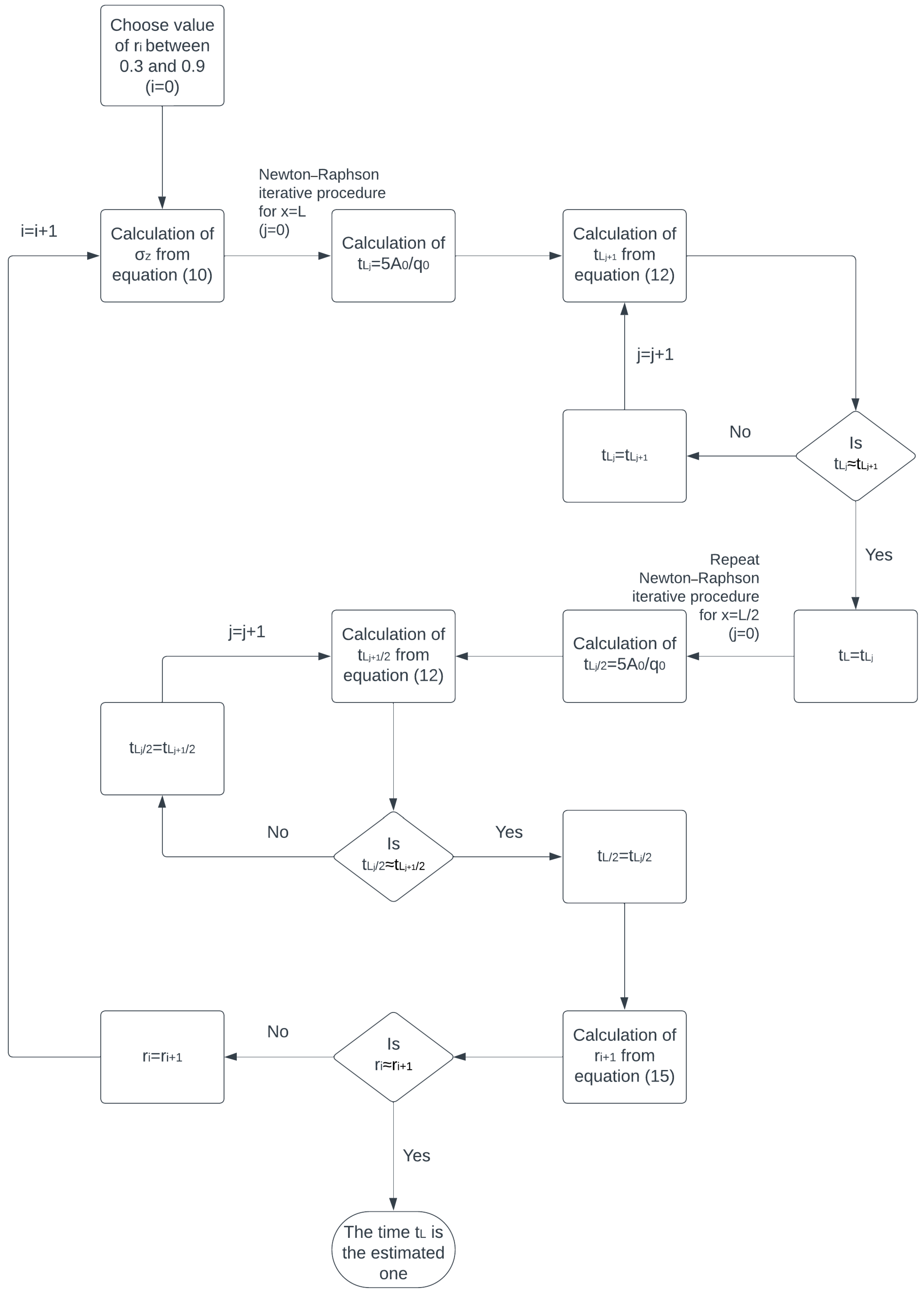
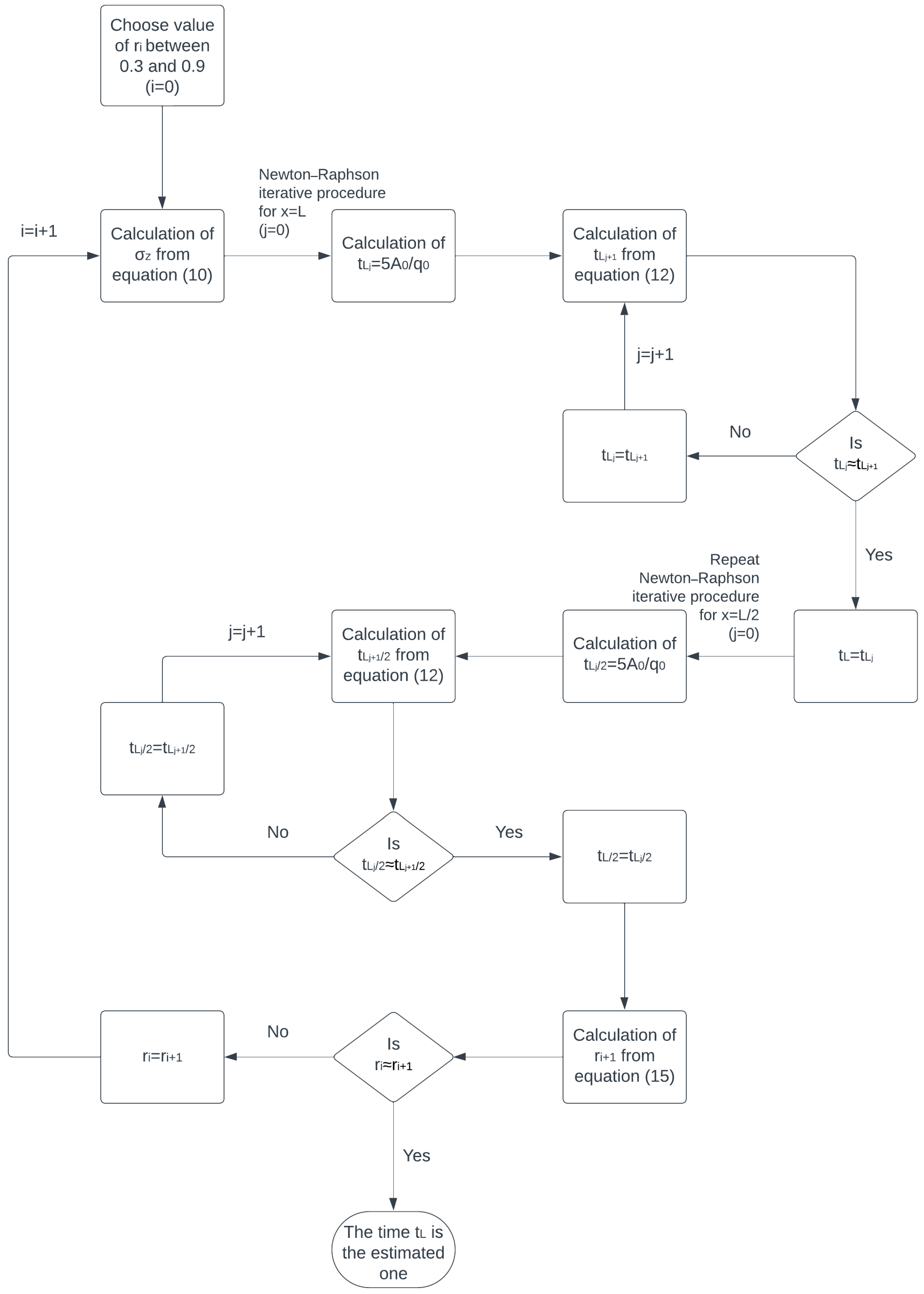
2.2. Newton–Raphson Iterative Procedure
- (i)
- First, an initial value of the parameter r is entered, which varies between 0.3 and 0.9. The value ri = 0.5 is usually chosen.
- (ii)
- Then, the value of the parameter σz is calculated, as mentioned in Equation (10). It should be noted that the value of σz is recalculated every time the value of r changes.
- (iii)
- The Newton–Raphson iterative procedure is then applied to find the advance time tL using the initial value ri as follows:
- An initial estimate of tL0 is created. The value tL0 = 5A0L/q0 is usually considered as an initial value.
- A better estimate of tL is tL1 given by the Newton–Raphson method using the relationshipwhereand c1 = σZkL, c2 = −q0 and c3 = σyA0L.
- Equation (13) is a transformed form of Equation (8) when x = L and t = tL. The initial estimate tL0 is compared with the value tL1. If the values tL0 and tL1 do not differ greatly, the next step, step 4 is applied; otherwise, step 2 is repeated and the tL2 value is calculated using tL1. The iterative process stops when two consecutive values converge. Empirically, three to four repetitions are sufficient.
- The advance time at the distance x = L/2 is calculated accordingly for the initial value ri as described in steps 2 and 3, and the volume balance equation is applied by using the value L/2 instead of L.
- (iv)
- The value ri+1 is calculated using the advance times tL and tL/2 calculated from the previous steps 3 and 4 as follows:or
- (v)
- The initial estimate ri is compared with the value ri+1 (Equation (15)). If the values converge, then it is assumed that the time tL is the estimated one. Otherwise, steps 2 to 4 are repeated using as a new initial value the value ri+1.
2.3. Valiantzas Method [17]
2.4. Experimental Data
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, Y.; Bai, M.; Zhang, S.; Wu, C.; Li, F. Development In Improved Surface Irrigation in China. Irrig. Drain. 2020, 69, 48–60. [Google Scholar] [CrossRef]
- Or, D.; Silva, H.R. Prediction of Surface Irrigation Advance Trajectories Using Soil Intake Properties. Irrig. Sci. 1996, 16, 159–167. [Google Scholar] [CrossRef]
- Walker, W.R.; Skogerboe, G.V. Surface Irrigation: Theory and Practice; Prentice-Hall, Inc.: Englewood Cliffs, NJ, USA, 1987. [Google Scholar]
- Bautista, E.; Schlegel, J.L. WinSRFR 5.1—Software and User Manual; USDA-ARS Arid Land Agricultural Research Center: Maricopa, AZ, USA, 2019. [Google Scholar]
- Strelkoff, T.; Katopodes, N.D. Border-irrigation hydraulics with zero inertia. J. Irrig. Drain. Div. 1977, 103, 325–342. [Google Scholar] [CrossRef]
- Elliott, R.L.; Walker, W.R.; Skogerboe, G.V. Zero-inertia modeling of furrow irrigation advance. J. Irrig. Drain. Div. 1982, 108, 179–195. [Google Scholar] [CrossRef]
- Valiantzas, J.D.; Aggelides, S.; Sassalou, A. Furrow infiltration estimation from time to a single advance point. Agric. Water Manag. 2001, 52, 17–32. [Google Scholar] [CrossRef]
- Philip, J.R.; Farrell, D.A. General solution of the infiltration-advance problem in irrigation hydraulics. J. Geophys. Res. 1964, 69, 621–631. [Google Scholar] [CrossRef]
- Lewis, M.R.; Milne, W.E. Analysis of border irrigation. Agric. Eng. 1938, 19, 267–272. [Google Scholar]
- Kostiakov, A.N. On the dynamics of the coefficients of water percolation in soils and on the necessity of studying it from a dynamic point of view for purpose of amelioration. Trans. 6th Commun. Int. Soc. Soil Sci. Russ. Part A 1932, 17–21. Available online: https://cir.nii.ac.jp/crid/1520853835465008512 (accessed on 27 February 2024).
- Lewis, M.R. The rate of infiltration of water in irrigation practice. Trans. Am. Geophys. Union 1937, 18, 361–368. [Google Scholar] [CrossRef]
- Philip, J.R. The theory of infiltration: 4. Sorptivity and algebraic infiltration equations. Soil Sci. 1957, 84, 257–264. [Google Scholar] [CrossRef]
- Horton, R.E. An approach towards a physical interpretation of infiltration capacity. Soil Sci. Soc. Am. J. 1941, 5, 399–417. [Google Scholar] [CrossRef]
- Cook, F.J.; Knight, J.H.; Doble, R.C.; Raine, S.R. An improved solution for the infiltration advance problem in irrigation hydraulics. Irrig. Sci. 2013, 31, 1113–1123. [Google Scholar] [CrossRef]
- United States Department of Agriculture (USDA). Furrow Irrigation; Chapter 5, Section 15, Soil Conservation Service; USDA: Washington, DC, USA, 1983. [Google Scholar]
- Valiantzas, J.D. Explicit time of advance formula for furrow design. J. Irrig. Drain. Eng. 1999, 125, 19–25. [Google Scholar] [CrossRef]
- Valiantzas, J.D. Optimal furrow design. I: Time of advance equation. J. Irrig. Drain. Eng. 2001, 127, 201–208. [Google Scholar] [CrossRef]
- Philip, J.R. Theory of infiltration. Adv. Hydrosci. 1969, 5, 215–296. [Google Scholar]
- Parlange, J.-Y. Note on infiltration advance front from border irrigation. Water Resour. Res. 1973, 9, 1075–1078. [Google Scholar] [CrossRef]
- Mailapalli, D.R.; Wallender, W.; Raghuwanshi, N.; Singh, R. Quick method for estimating furrow infiltration. J. Irrig. Drain. Eng. 2008, 134, 788–795. [Google Scholar] [CrossRef]
- Rabbaniha, H.; Ebrahimian, H. Developing a simple method for estimating soil infiltration in furrow and border irrigation using advance, recession and runoff data. Irrig. Drain. 2024, 73, 50–63. [Google Scholar] [CrossRef]
- Elliott, R.L.; Walker, W.R. Field evaluation of furrow infiltration and advance functions. Trans. ASAE 1982, 25, 0396–0400. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Ghaffari, P.; Ghameshlou, A.N.; Tabatabaei, S.-H.; Dizaj, A.A. Extensive comparison of various infiltration estimation methods for furrow irrigation under different field conditions. Agric. Water Manag. 2020, 230, 105960. [Google Scholar] [CrossRef]
- Bautista, E.; Clemmens, A.J.; Strelkoff, T.S. Structured application of the two-point method for the estimation of infiltration parameters in surface irrigation. J. Irrig. Drain. Eng. 2009, 135, 566–578. [Google Scholar] [CrossRef]
- Kiefer, F.W., Jr. Average Depth of Absorbed Water in Surface Irrigation; Special Publication; Department of Civil Engineering, Utah State University: Logan, UT, USA, 1965. [Google Scholar]
- Hart, W.E.; Bassett, D.L.; Strelkoff, T. Surface irrigation hydraulics-kinematics. J. Irrig. Drain. Div. 1968, 94, 419–440. [Google Scholar] [CrossRef]
- Walker, W.R.; Busman, J.D. Real time estimation of furrow infiltration. J. Irrig. Drain. Eng. 1990, 116, 299–318. [Google Scholar] [CrossRef]
- Wilson, B.N.; Elliott, R.L. Furrow advance using simple routing models. J. Irrig. Drain. Eng. 1988, 114, 104–117. [Google Scholar] [CrossRef]
- Camacho, E.; Perez-Lucena, C.; Roldan-Canas, J.; Alcaide, M. IPE: Model for management and control of furrow irrigation in real time. J. Irrig. Drain. Eng. 1997, 123, 264–269. [Google Scholar] [CrossRef]
- Kargas, G.; Koka, D.; Londra, P.A. Determination of Soil Hydraulic Properties from Infiltration Data Using Various Methods. Land 2022, 11, 779. [Google Scholar] [CrossRef]
- Smiles, D.E.; Knight, J.H. A note on the use of the Philip infiltration equation. Aust. J. Soil Res. 1976, 14, 103–108. [Google Scholar] [CrossRef]
- Panahi, A.; Seyedzadeh, A.; Maroufpoor, E. Investigating the midpoint of a two-point method for predicting advance and infiltration in surface irrigation. Irrig. Drain. 2021, 70, 1095–1106. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
| Data Series | Walker and Busman [27] | Camacho et al. [29] | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Flowell Wheel | Flowell Non-Wheel | Kimberly Wheel | Kimberly Non-Wheel | Greeley Wheel | Cordoba | |||||||||
| Inflow rate | q0 (m3/min) | 0.12 | 0.12 | 0.09 | 0.048 | 0.114 | 0.09 | |||||||
| Furrow slope | S0(m/m) | 0.008 | 0.008 | 0.0104 | 0.0104 | 0.008 | 0.003 | |||||||
| Manning roughness coefficient | n | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | |||||||
| Furrow shape parameters | ρ1 | 0.3269 | 0.3269 | 0.6644 | 0.6644 | 0.369 | 0.39 | |||||||
| ρ2 | 2.734 | 2.734 | 2.8787 | 2.8787 | 2.81 | 2.797 | ||||||||
| Furrow length | L (m) = x2 | 360 | 274 | 360 | 112 | 411 | 200 | |||||||
| Advance time | tL (min) = t2 | 400 | 432 | 208 | 560 | 63 | 51.5 | |||||||
| Advance distance and corresponding time | x1 (m) | 180 | 140 | 160 | 60 | 205.5 | 100 | |||||||
| t1 (min) | 41 | 40 | 48 | 120 | 26 | 20.25 | ||||||||
| Surface profile shape factor | σy | 0.77 | 0.77 | 0.77 | 0.77 | 0.77 | 0.77 | |||||||
| Extended Lewis–Kostiakov parameters | α | 0.534 | 0.673 | 0.212 | 0.533 | 0.45 | 0.4550 | |||||||
| k (m2/minα) | 0.0028 | 0.0022 | 0.0088 | 0.007 | 0.0021 | 0.0033 | ||||||||
| f0 (m2/min) | 0.00022 | 0.00022 | 0.00017 | 0.00017 | 0.0000 | 0.0000 | ||||||||
| Data Series | Wilson and Elliot [28] | |||||||||||||
| Benson B-1 | Benson B-2 | Benson B-3 | Matchett M-1 | Matchett M-2 | Matchett M-3 | Printz P-1 | Printz P-2 | Printz P-3 | ||||||
| Inflow rate | q0 (m3/min) | 0.1668 | 0.0684 | 0.0702 | 0.051 | 0.0552 | 0.0264 | 0.2886 | 0.2094 | 0.1662 | ||||
| Furrow slope | S0 | 0.0044 | 0.0044 | 0.0044 | 0.0092 | 0.0095 | 0.0095 | 0.0023 | 0.0025 | 0.0025 | ||||
| Manning roughness coefficient | n | 0.03 | 0.02 | 0.02 | 0.03 | 0.02 | 0.02 | 0.03 | 0.02 | 0.02 | ||||
| Furrow shape parameters | ρ1 | 0.46 | 0.58 | 0.34 | 0.3 | 1.35 | 2.12 | 0.92 | 0.615 | 0.73 | ||||
| ρ2 | 2.86 | 2.91 | 2.84 | 2.73 | 3 | 3.15 | 2.91 | 2.924 | 2.98 | |||||
| Furrow length | L (m) = x2 | 500 | 500 | 500 | 400 | 400 | 400 | 200 | 300 | 300 | ||||
| Advance time | tL (min) = t2 | 175 | 344.5 | 247 | 124.3 | 232.2 | 213 | 178 | 45.5 | 73 | ||||
| Advance distance and corresponding time | x1 (m) | 300 | 300 | 300 | 200 | 200 | 200 | 100 | 100 | 200 | ||||
| t1 (min) | 84.5 | 159 | 123.5 | 38 | 70.5 | 88.2 | 13.5 | 15 | 43 | |||||
| Surface profile shape factor | σy | 0.77 | 0.77 | 0.77 | 0.77 | 0.77 | 0.77 | 0.77 | 0.77 | 0.77 | ||||
| Extended Lewis–Kostiakov parameters | α | 0.02 | 0.02 | 0.01 | 0.48 | 0.4 | 0.16 | 0.4 | 0.02 | 0.02 | ||||
| k (m2/minα) | 0.0252 | 0.018 | 0.0173 | 0.0011 | 0.0033 | 0.0039 | 0.0078 | 0.013 | 0.0161 | |||||
| f0 (m2/min) | 0.00023 | 0.0001 | 0.00008 | 0.00003 | 0.00003 | 0.00002 | 0.00141 | 0.00049 | 0.0004 | |||||
| Parameters | Walker and Busman [27] | Camacho et al. [29] | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Flowell Wheel | Flowell Non-Wheel | Kimberly Wheel | Kimberly Non-Wheel | Greeley Wheel | Cordoba | ||||||
| α | 0.7534 | 0.7916 | 0.5143 | 0.6458 | 0.4500 | 0.4550 | |||||
| k (m2/minα) | 0.0017 | 0.0018 | 0.0039 | 0.0050 | 0.0021 | 0.0033 | |||||
| S (m2/min0.5) | 0.003105 | 0.003547 | 0.003916 | 0.007826 | - | - | |||||
| A (m2/min) | 0.000237 | 0.000355 | 0.000022 | 0.000205 | - | - | |||||
| Parameters | Wilson and Elliot [28] | ||||||||||
| Benson B-1 | Benson B-2 | Benson B-3 | Matchett M-1 | Matchett M-2 | Matchett M-3 | Printz P-1 | Printz P-2 | Printz P-3 | |||
| α | 0.3533 | 0.3952 | 0.2767 | 0.5720 | 0.4731 | 0.2966 | 0.758 | 0.2929 | 0.3894 | ||
| k (m2/minα) | 0.0103 | 0.0051 | 0.0077 | 0.0009 | 0.0027 | 0.0027 | 0.00576 | 0.0100 | 0.0083 | ||
| S (m2/min0.5) | - | - | - | 0.5720 | - | - | 0.006103 | - | - | ||
| A (m2/min) | - | - | - | 0.000025 | - | - | 0.001296 | - | - | ||
| Coefficient r | ||
|---|---|---|
| Experimental Furrows | Equation (11) | Newton–Raphson Iterative Procedure |
| Flowell wheel | 0.304 | 0.354 |
| Flowell non-wheel | 0.282 | 0.297 |
| Kimberly wheel | 0.553 | 0.574 |
| Kimberly non-wheel | 0.405 | 0.382 |
| Greeley Wheel | 0.783 | 0.763 |
| Cordoba | 0.743 | 0.734 |
| Benson B-1 | 0.702 | 0.701 |
| Benson B-2 | 0.661 | 0.665 |
| Benson B-3 | 0.737 | 0.764 |
| Matchett M-1 | 0.585 | 0.606 |
| Matchett M-2 | 0.582 | 0.582 |
| Matchett M-3 | 0.786 | 0.749 |
| Printz P-1 | 0.269 | 0.309 |
| Printz P-2 | 0.990 | 0.735 |
| Printz P-3 | 0.766 | 0.691 |
| Advance Time tL (min) | |||||
|---|---|---|---|---|---|
| Experimental Furrows | Measured Values | Valiantzas Method | Newton–Raphson Iterative Procedure | Philip and Farrell Method | |
| Lewis–Kostiakov Equation | Philip Equation | ||||
| Flowell wheel | 400 | 386.70 | 340.53 | 357.10 | 397.80 |
| Flowell non-wheel | 432 | 479.51 | 404.48 | 456.86 | 616.97 |
| Kimberly wheel | 208 | 201.87 | 198.13 | 173.57 | 175.31 |
| Kimberly non-wheel | 560 | 558.46 | 534.69 | 547.60 | 577.78 |
| Greeley Wheel | 63 | 61.47 | 61.04 | 25.67 | - |
| Cordoba | 51.5 | 50.33 | 50.40 | 24.93 | - |
| Benson B-1 | 175 | 181.86 | 180.44 | 143.07 | - |
| Benson B-2 | 344.5 | 310.00 | 305.30 | 271.13 | - |
| Benson B-3 | 247 | 235.54 | 231.84 | 195.37 | - |
| Matchett M-1 | 124.3 | 92.22 | 94.11 | 60.41 | 59.44 |
| Matchett M-2 | 232.2 | 204.44 | 202.08 | 181.33 | - |
| Matchett M-3 | 213 | 176.85 | 174.30 | 143.13 | - |
| Printz P-1 | 178 | 160.31 | 156.95 | 145.62 | 533.71 |
| Printz P-2 | 45.5 | 52.22 | 51.25 | 32.53 | - |
| Printz P-3 | 73 | 79.35 | 79.08 | 57.29 | - |
| |RE| (%) | ||||
|---|---|---|---|---|
| Experimental Furrows | Valiantzas Method | Newton–Raphson Iterative Procedure | Philip and Farrell Method | |
| Lewis–Kostiakov Equation | Philip Equation | |||
| Flowell wheel | 3.33 | 14.87 | 10.72 | 0.55 |
| Flowell non-wheel | 11.00 | 6.37 | 5.76 | 42.82 |
| Kimberly wheel | 2.95 | 4.74 | 16.55 | 15.72 |
| Kimberly non-wheel | 0.27 | 4.52 | 2.21 | 3.17 |
| Greeley wheel | 2.42 | 3.11 | 59.24 | - |
| Cordoba | 2.27 | 2.13 | 51.59 | - |
| Benson B-1 | 3.92 | 3.11 | 18.25 | - |
| Benson B-2 | 10.01 | 11.38 | 21.30 | - |
| Benson B-3 | 4.64 | 6.14 | 20.90 | - |
| Matchett M-1 | 25.81 | 24.29 | 51.39 | 30.83 |
| Matchett M-2 | 11.96 | 12.97 | 21.91 | - |
| Matchett M-3 | 16.97 | 18.17 | 32.80 | - |
| Printz P-1 | 9.94 | 11.83 | 18.19 | 199.84 |
| Printz P-2 | 14.76 | 12.63 | 28.50 | - |
| Printz P-3 | 8.70 | 8.33 | 21.51 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kargas, G.; Koka, D.; Londra, P.A.; Mindrinos, L. Comparison of Methods Predicting Advance Time in Furrow Irrigation. Water 2024, 16, 1105. https://doi.org/10.3390/w16081105
Kargas G, Koka D, Londra PA, Mindrinos L. Comparison of Methods Predicting Advance Time in Furrow Irrigation. Water. 2024; 16(8):1105. https://doi.org/10.3390/w16081105
Chicago/Turabian StyleKargas, George, Dimitrios Koka, Paraskevi A. Londra, and Leonidas Mindrinos. 2024. "Comparison of Methods Predicting Advance Time in Furrow Irrigation" Water 16, no. 8: 1105. https://doi.org/10.3390/w16081105
APA StyleKargas, G., Koka, D., Londra, P. A., & Mindrinos, L. (2024). Comparison of Methods Predicting Advance Time in Furrow Irrigation. Water, 16(8), 1105. https://doi.org/10.3390/w16081105