
A Feature Selection Method Based on Relief Feature Ranking with Recursive Feature Elimination for the Inversion of Urban River Water Quality Parameters Using Multispectral Imagery from an Unmanned Aerial Vehicle


Abstract
1. Introduction
2. Materials and Methods
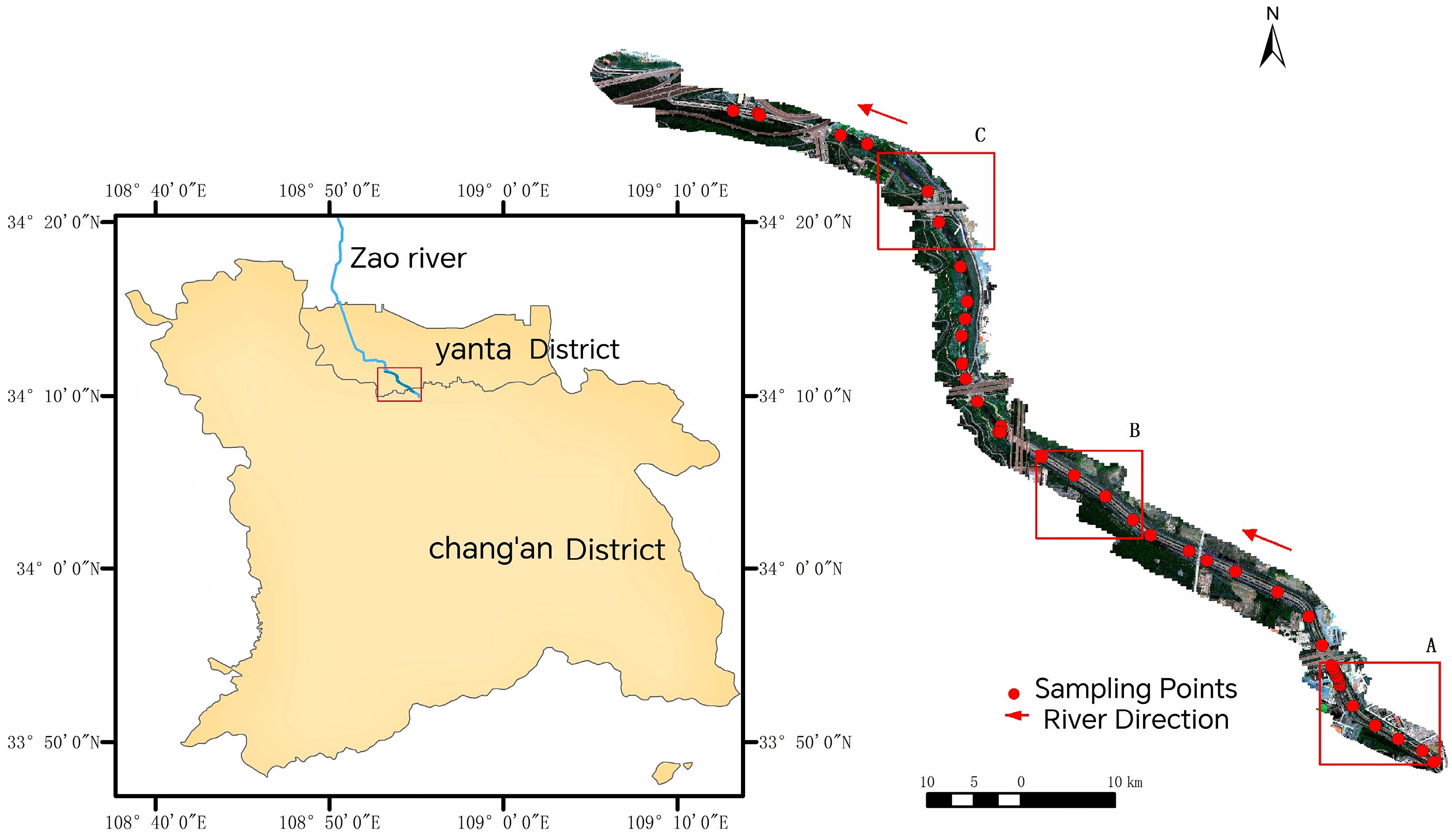
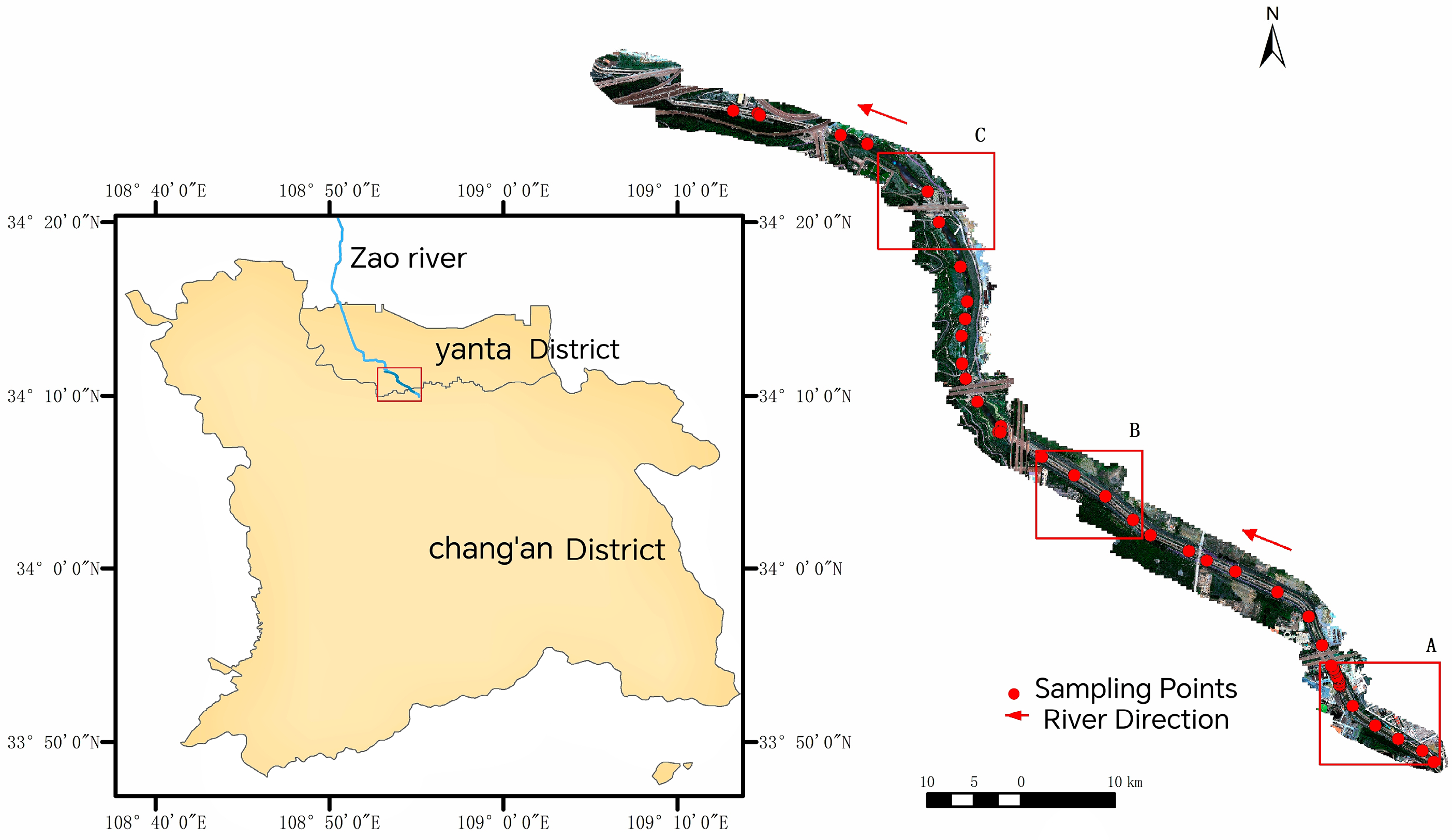
2.1. Study Area
2.2. Data
2.2.1. UAV Data and Preprocessing
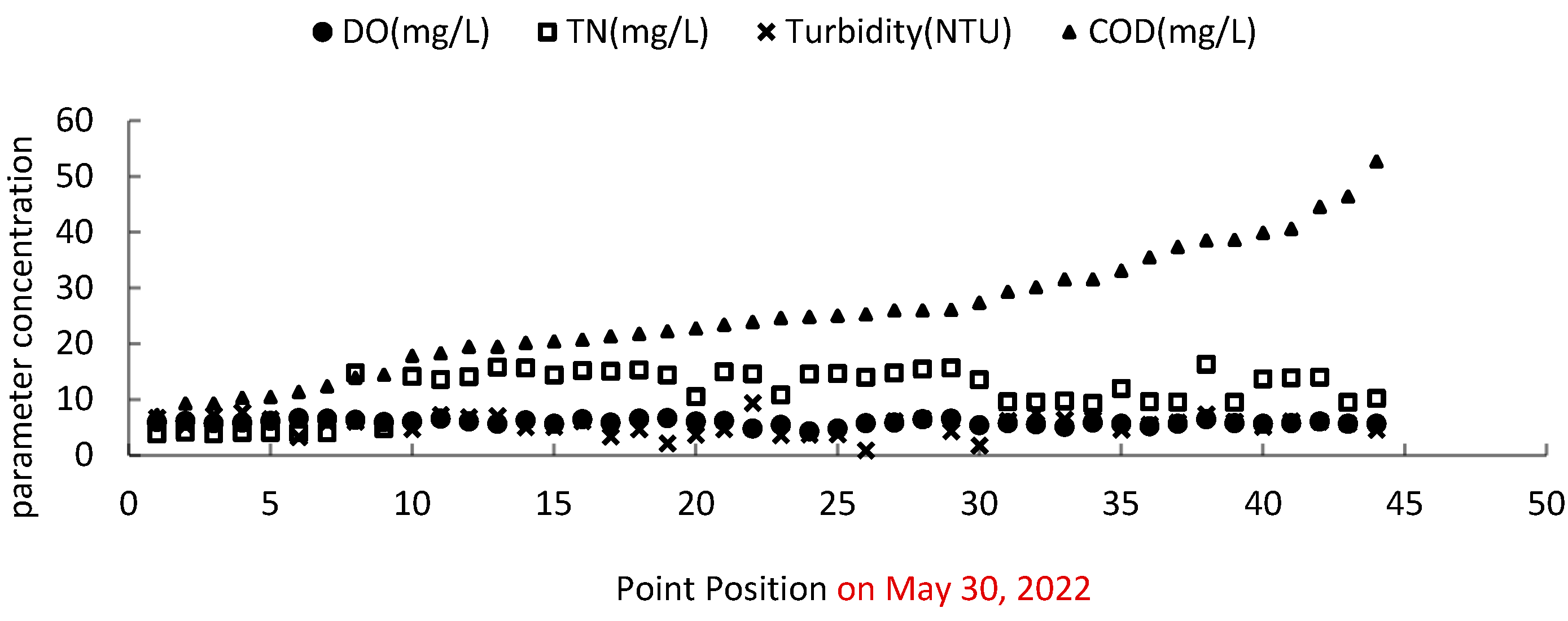
2.2.2. On-Site Data
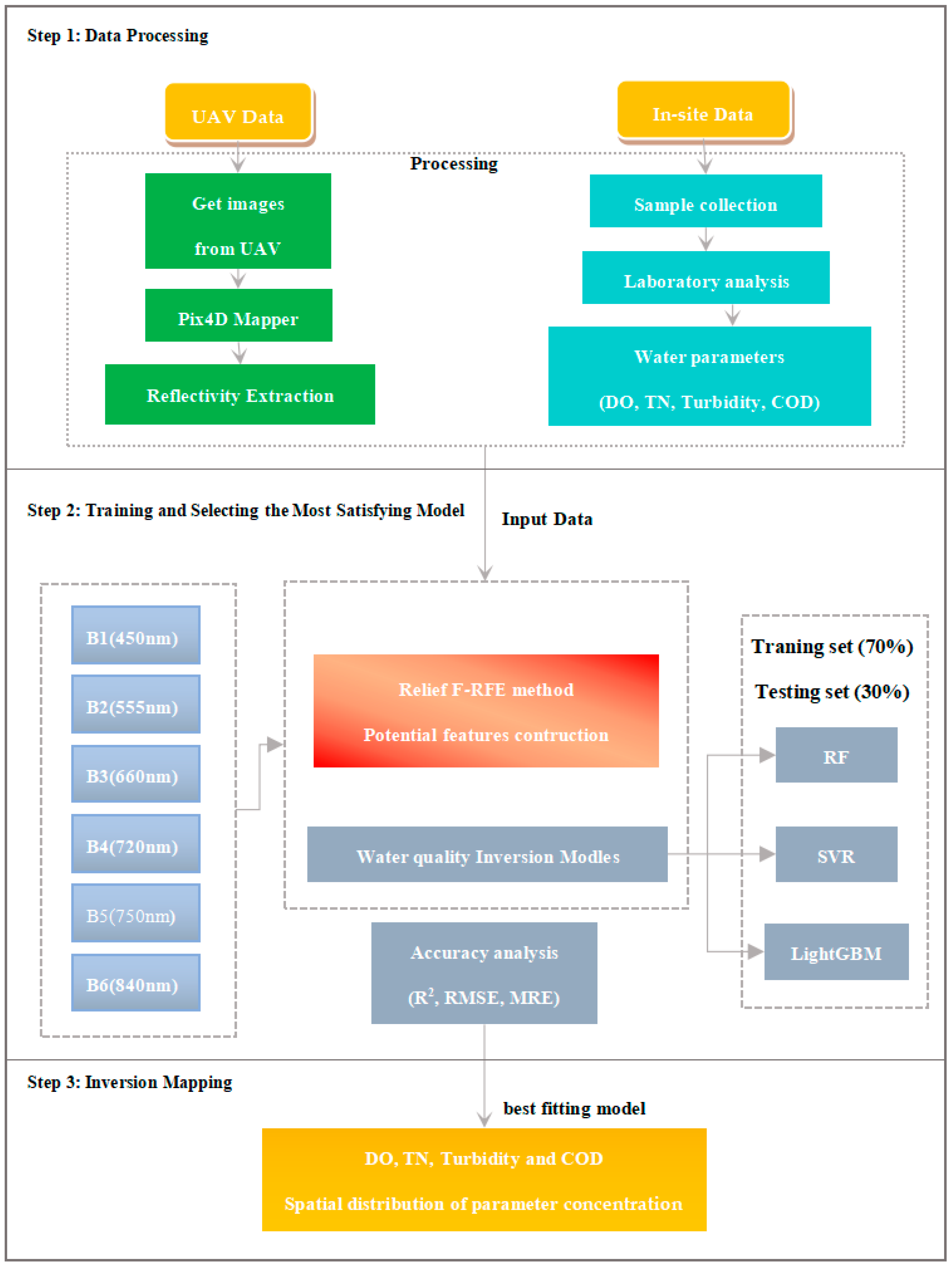
2.3. Methodology
2.3.1. Potential Feature Dataset Construction
2.3.2. Relief F-RFE Feature Optimization Algorithm
2.3.3. Modeling
2.4. Accuracy Evaluation
3. Results
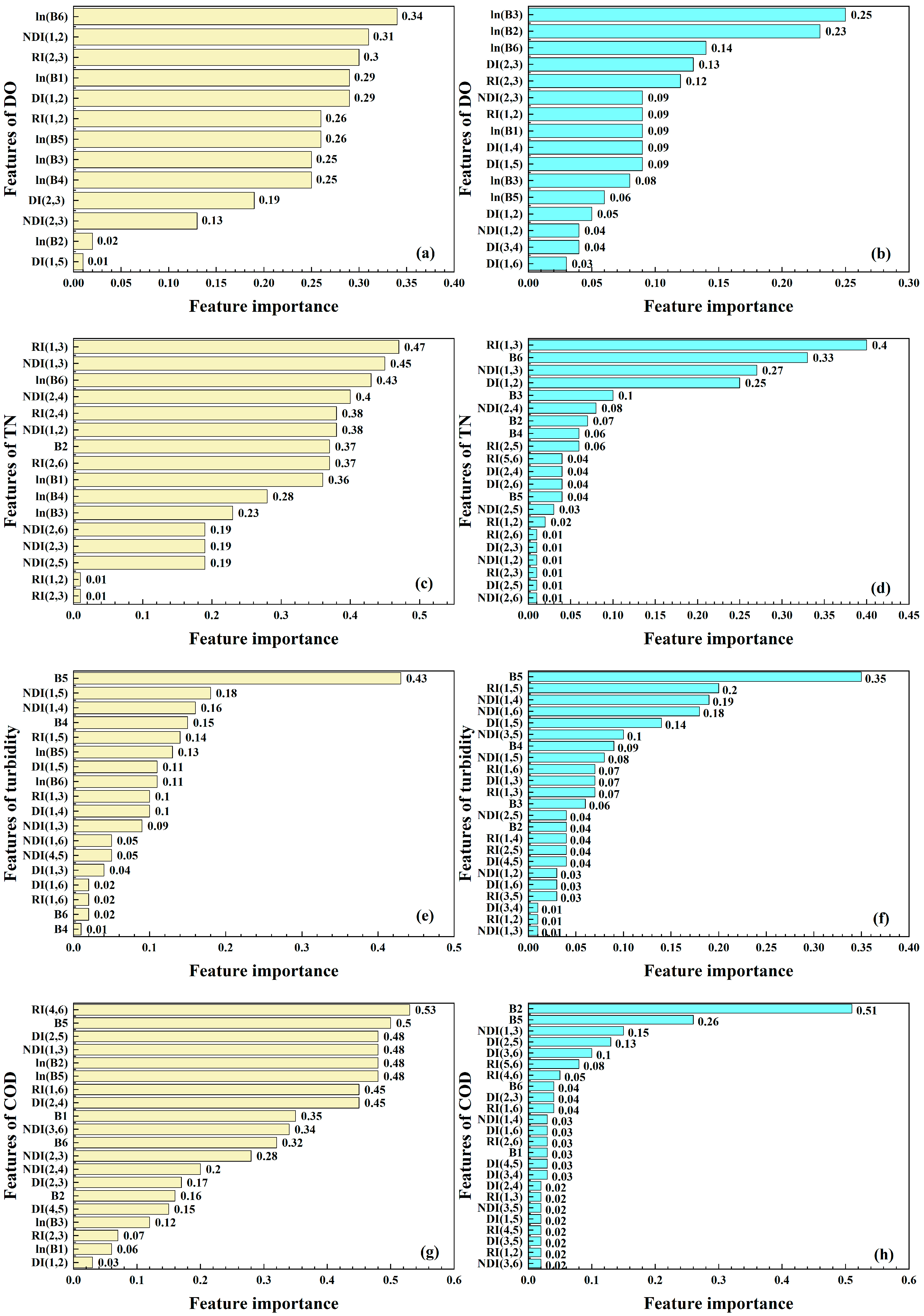
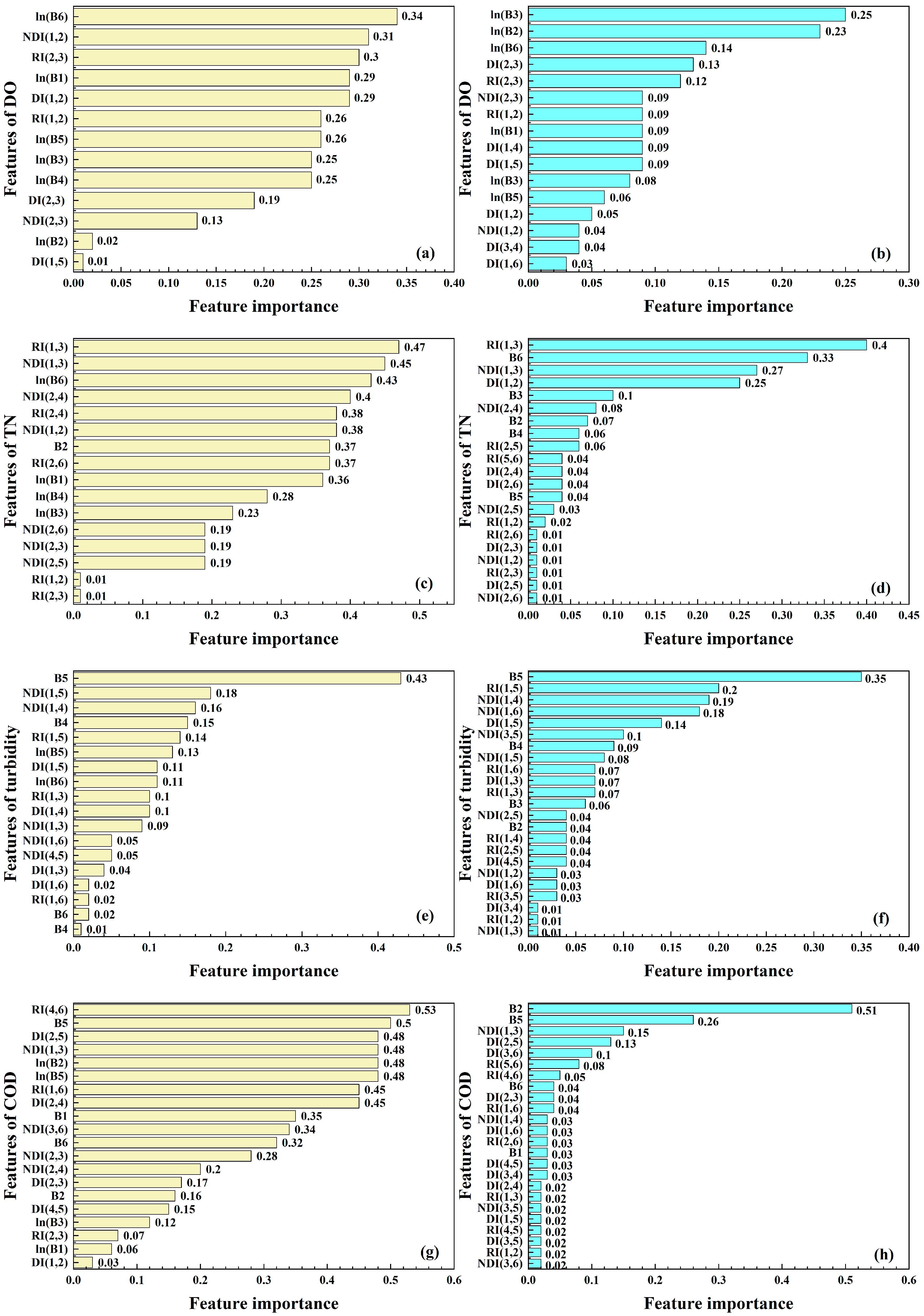
3.1. Feature Optimization Results
3.2. Comparison Analysis of Models
3.3. Retrieval of Water Quality Parameters
4. Conclusions
- (1)
- UAV multispectral remote sensing technology proves effective for urban river water quality inversions, as demonstrated by our models’ ability to accurately quantify the spatial distribution of four key water quality parameters in the Zao River in Xi’an. Notably, logarithmic indices emerge as pivotal features in DO parameter analysis, while combined bands are more significant in TN and COD parameter inversions. Additionally, red-edged bands dominate in turbidity parameter inversions.
- (2)
- Feature selection serves to eliminate redundant features. From our comprehensive accuracy evaluation results, it can be observed that the Relief F-RFE method effectively improves the models’ classification accuracy. Furthermore, integrating the Relief F-RFE feature selection method into the models enhances their fitting performance even further. The SVR algorithm that uses the Relief F-RFE method exhibits generally higher accuracy in parameter inversion. This approach offers distinct advantages in feature selection for modeling, showcasing enhanced robustness and applicability.
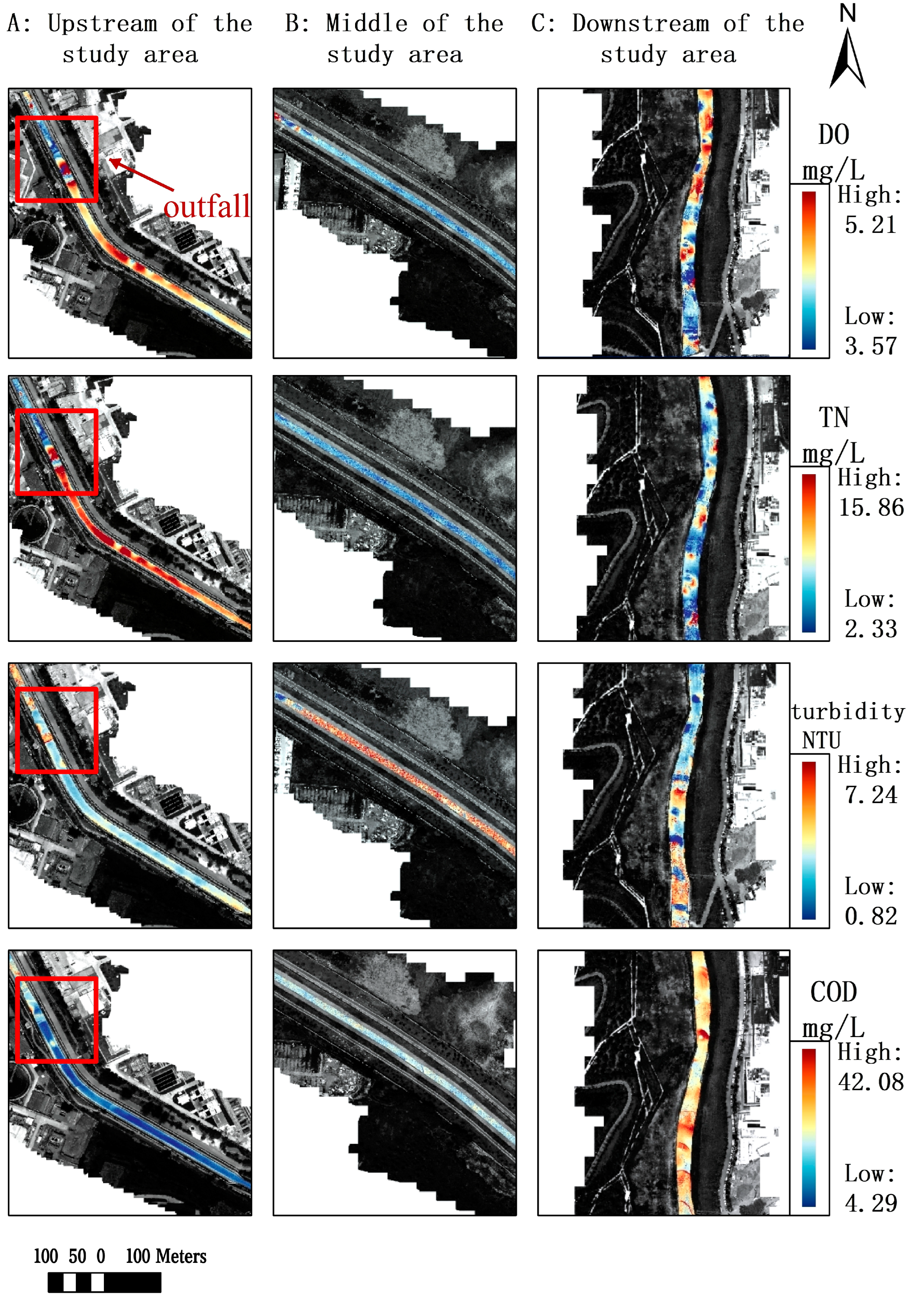
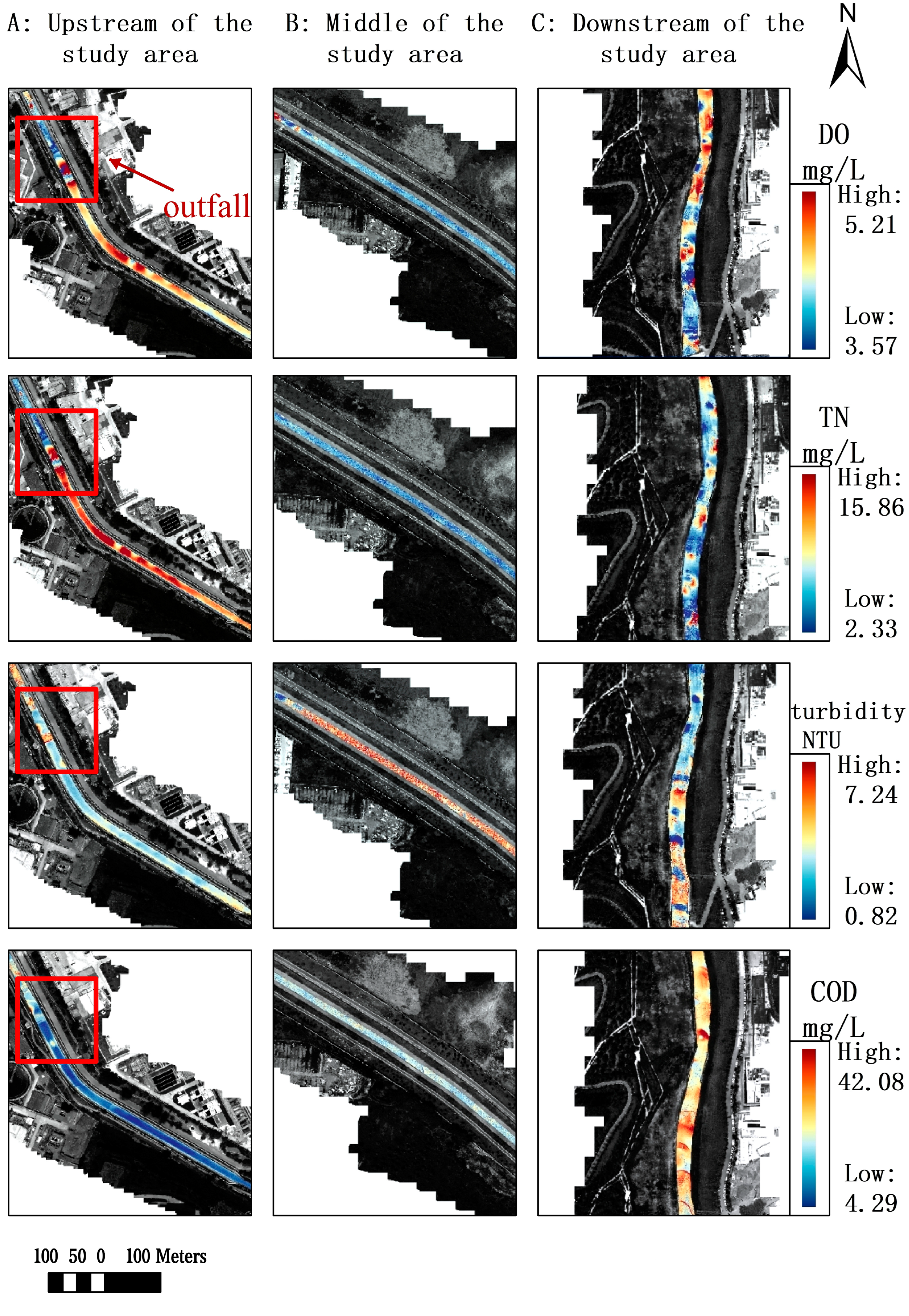
- (3)
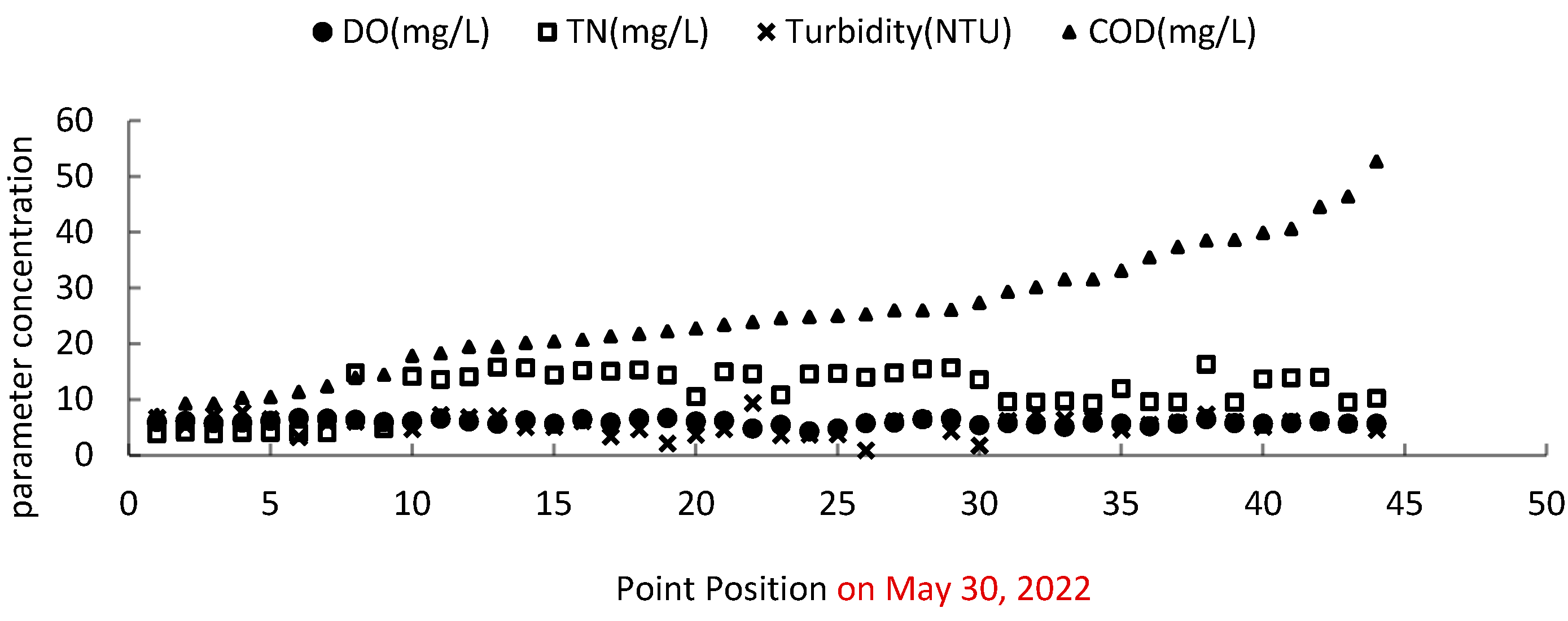
- The spatial distribution of these water quality parameters in the Zao River study area reveals notable trends: TN concentrations increase notably near upstream outfalls, while DO and turbidity concentrations exhibit steady changes from upstream to downstream. Additionally, COD concentrations gradually rise along the river’s course, from upstream to downstream.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hoekstra, A.Y.; Buurman, J.; van Ginkel, K.C.H. Urban water security: A review. Environ. Res. Lett. 2018, 13, 53002. [Google Scholar] [CrossRef]
- Zhao, Z.; Cao, Y.; Fan, Y.; Yang, H.; Feng, X.; Li, L.; Zhang, H.; Xing, L.; Zhao, M. Ladderane records over the last century in the East China sea: Proxies for anammox and eutrophication changes. Water Res. 2019, 156, 297–304. [Google Scholar] [CrossRef] [PubMed]
- Basu, N.B.; Van Meter, K.J.; Byrnes, D.K.; Van Cappellen, P.; Brouwer, R.; Jacobsen, B.H.; Jarsjö, J.; Rudolph, D.L.; Cunha, M.C.; Nelson, N.; et al. Managing nitrogen legacies to accelerate water quality improvement. Nat. Geosci. 2022, 15, 97–105. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, L.; Mu, C.; Huang, X. Water quality change and pollution source accounting of Licun River under long-term governance. Sci. Rep. 2022, 12, 2779. [Google Scholar] [CrossRef]
- Zhao, S. Inversion of Water Quality Parameters of Fuyang River in Handan City Based on Multi-Source Remote Sensing Data. Master’s Thesis, Hebei University of Engineering, Handan, China, 2021. [Google Scholar]
- Palmer, S.C.J.; Kutser, T.; Hunter, P.D. Remote sensing of inland waters: Challenges, progress and future directions. Remote Sens. Environ. 2015, 157, 1–8. [Google Scholar] [CrossRef]
- Feng, L.; Dai, Y.; Hou, X.; Xu, Y.; Liu, J.; Zheng, C. Concerns about phytoplankton bloom trends in global lakes. Nature 2021, 590, E35. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, L.; Zhou, Y.; Zhang, L.; Yao, X.; Shi, K.; Jeppesen, E.; Yu, Q.; Zhu, W. Chromophoric dissolved organic matter in inland waters: Present knowledge and future challenges. Sci. Total Environ. 2021, 759, 143550. [Google Scholar] [CrossRef]
- Park, J.; Kim, K.T.; Lee, W.H. Recent Advances in Information and Communications Technology (ICT) and Sensor Technology for Monitoring Water Quality. Water 2020, 12, 510. [Google Scholar] [CrossRef]
- Mamun, M.; Ferdous, J.; An, K. Empirical Estimation of Nutrient, Organic Matter and Algal Chlorophyll in a Drinking Water Reservoir Using Landsat 5 TM Data. Remote Sens. 2021, 13, 2256. [Google Scholar] [CrossRef]
- Shi, J.; Shen, Q.; Yao, Y.; Li, J.; Chen, F.; Wang, R.; Xu, W.; Gao, Z.; Wang, L.; Zhou, Y. Estimation of Chlorophyll-a Concentrations in Small Water Bodies: Comparison of Fused Gaofen-6 and Sentinel-2 Sensors. Remote Sens. 2022, 14, 229. [Google Scholar] [CrossRef]
- Cao, Z.; Ma, R.; Duan, H.; Pahlevan, N.; Melack, J.; Shen, M.; Xue, K. A machine learning approach to estimate chlorophyll-a from Landsat-8 measurements in inland lakes. Remote Sens. Environ. 2020, 248, 111974. [Google Scholar] [CrossRef]
- Moses, W.J.; Gitelson, A.A.; Berdnikov, S.; Povazhnyy, V. Satellite Estimation of Chlorophyll-a Concentration Using the Red and NIR Bands of MERIS—The Azov Sea Case Study. IEEE Geosci. Remote Sens. Lett. 2009, 6, 845–849. [Google Scholar] [CrossRef]
- Hu, Z.T.; Zhou, Y. Research on Urban Water Quality Monitoring Method Based on Low Altitude Multispectral Remote Sensing. Geospat. Inf. 2020, 18, 4–8. [Google Scholar] [CrossRef]
- Zhu, X.; Liu, L.M.; Ye, Z.L. Unmanned aerial vehicle water quality remote sensing monitoring method. China Water Transp. 2021, 157–159. [Google Scholar] [CrossRef]
- McEliece, R.; Hinz, S.; Guarini, J.M.; Coston-Guarini, J. Evaluation of Nearshore and Offshore Water Quality Assessment Using UAV Multispectral Imagery. Remote Sens. 2020, 12, 2258. [Google Scholar] [CrossRef]
- Guo, Y.; Fu, Y.; Hao, F.; Zhang, X.; Wu, W.; Jin, X.; Bryant, C.R.; Senthilnath, J. Integrated phenology and climate in rice yields prediction using machine learning methods. Ecol. Indic. 2021, 120, 106935. [Google Scholar] [CrossRef]
- Pahlevan, N.; Smith, B.; Schalles, J.; Binding, C.; Cao, Z.; Ma, R.; Alikas, K.; Kangro, K.; Gurlin, D.; Nguyen, H.; et al. Seamless retrievals of chlorophyll-a from Sentinel-2 (MSI) and Sentinel-3 (OLCI) in inland and coastal waters: A machine-learning approach. Remote Sens. Environ. 2020, 240, 111604. [Google Scholar] [CrossRef]
- Ma, Y.; Song, K.; Wen, Z.; Liu, G.; Shang, Y.; Lyu, L.; Du, J.; Yang, Q.; Li, S.; Tao, H.; et al. Remote Sensing of Turbidity for Lakes in Northeast China Using Sentinel-2 Images with Machine Learning Algorithms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 9132–9146. [Google Scholar] [CrossRef]
- Fang, X.R.; Wen, Z.F.; Chen, J.L.; Wu, S.J.; Huang, Y.Y.; Ma, M.H. Remote sensing estimation of suspended sediment concentration based on Random Forest Regression Model. J. Remote Sens. 2019, 23, 756–772. [Google Scholar] [CrossRef]
- Yan, D.D.; Huang, Y.; Wang, D.M.; Chen, Q.W.; Wang, Z.Y.; Liu, D.S.; Zhu, Q.H.; Wei, L.L.; Hong, Y.M. Estimation of total nitrogen and total organic carbon based on UV fluorescence water quality sensor and machine learning. Acta Sci. Circumstantiae 2023, 43, 155–165. [Google Scholar] [CrossRef]
- Xiang, X.J.; Zhang, Y.Z.; Xu, H.H.; Li, Y.; Wang, S.Q.; Zheng, Y.P. Research on Water Quality Prediction Based on CEEMDAN-VMD-TCN-LightGBM Model. China Rural. Water Hydropower. 2023. Available online: https://link.cnki.net/urlid/42.1419.TV.20231113.1049.006 (accessed on 12 March 2024).
- Yan, Y.; Wang, Y.; Yu, C.; Zhang, Z. Multispectral Remote Sensing for Estimating Water Quality Parameters: A Comparative Study of Inversion Methods Using Unmanned Aerial Vehicles (UAVs). Sustainability 2023, 15, 10298. [Google Scholar] [CrossRef]
- Lu, C.; Xu, S.H.; Zhu, J. Building extraction from high resolution remote sensing image based on improved U-Net model. Sci. Surv. Mapp. 2021, 46, 140–146. [Google Scholar]
- Sankararao, A.U.; Rajalakshmi, P.; Kaliamoorthy, S.; Choudhary, S. Water Stress Detection in Pearl Millet Canopy with Selected Wavebands using UAV Based. In Proceedings of the 2022 IEEE Sensors Applications Symposium (SAS), Sundsvall, Sweden, 1–3 August 2022; pp. 1–6. [Google Scholar]
- Zhang, C.Y.; Qiu, X.Y.; Qian, H.Y.; Liu, Y.; Zhu, J.C. Research on fault diagnosis method of turbocharger rotor based on Hu-SVM-RFE. J. Mech. 2023, 39, 344–351. [Google Scholar] [CrossRef]
- Chen, Q.; Meng, Z.; Liu, X.; Jin, Q.; Su, R. Decision Variants for the Automatic Determination of Optimal Feature Subset in RF-RFE. Genes 2018, 9, 301. [Google Scholar] [CrossRef]
- Jiang, X.; Zhang, Y.; Li, Y.; Zhang, B. Forecast and analysis of aircraft passenger satisfaction based on RF-RFE-LR model. Sci. Rep. 2022, 12, 11174. [Google Scholar] [CrossRef] [PubMed]
- Marwa, H.; Bechikh, S.; Cheng, H.C. A Multi-objective hybrid filter-wrapper evolutionary approach for feature selection. Memetic Comput. 2019, 11, 193. [Google Scholar] [CrossRef]
- Xiang, S.Y.; Xu, Z.H.; Zhang, Y.W.; Zhang, Q.; Zhou, X.; Yu, H.; Li, B.; Li, Y.F. Construction and Application of Relief F-RFE Feature Selection Algorithm for Hyperspectral Image Classification. Spectrosc. Spectr. Anal. 2022, 42, 3283–3290. [Google Scholar]
- Mooralitharan, S.; Mohd Hanafiah, Z.; Abd Manan, T.S.B.; Muhammad-Sukki, F.; Wan-Mohtar, W.A.A.Q.I.; Wan Mohtar, W.H.M. Vital Conditions to Remove Pollutants from Synthetic Wastewater Using Malaysian Ganoderma lucidum. Sustainability 2023, 15, 3819. [Google Scholar] [CrossRef]
- Shaanxi Provincial Local Chronicles Compilation Committee. Shaanxi Provincial Annals; Shaanxi People’s Publishing House: Xi’an, China, 1999; Volume 14. [Google Scholar]
- Water Resources Department of Shaanxi Province. Shaanxi Provincial Water Resources Planning; Water Resources Department of Shaanxi Province: Xi’an, China, 2010. [Google Scholar]
- HJ494-2009; Technical Specifications for Water Quality Sampling. Ministry of Environmental Protection: Shenyang, China, 2009.
- Liang, X.L.; Pan, Z.Q.; Wang, A.P.; Yao, X.X.; Liu, L.J.; Zhou, T. Determination of Dissolved Oxygen in Water by Iodo metric method. Meas. By Chem. Anal. 2008, 17, 54–56. [Google Scholar]
- Baulch, H.M. Asking the Right Questions about Nutrient Control in Aquatic Ecosystems. Environ. Sci. Technol. 2013, 47, 1188–1189. [Google Scholar] [CrossRef] [PubMed]
- Hanafiah, Z.M.; Azmi, A.R.; Wan-Mohtar, W.A.A.Q.I.; Olivito, F.; Golemme, G.; Ilham, Z.; Jamaludin, A.A.; Razali, N.; Halim-Lim, S.A.; Wan Mohtar, W.H.M. Water Quality Assessment and Decolourisation of Contaminated Ex-Mining Lake Water Using Bioreactor Dye-Eating Fungus (BioDeF) System: A Real Case Study. Toxics 2024, 12, 60. [Google Scholar] [CrossRef]
- Qiu, J.L.; Liu, Q.Y.; He, L. Chemical oxygen demand test standard and test method. Chem. Res. Appl. 2023, 35, 2809–2819. [Google Scholar] [CrossRef]
- GB3838-2002; Environmental Quality Standard for Surface Water. Part 7: Implementation and Supervision of Standards. China Environmental Science Press: Beijing, China, 2002.
- Jiang, Y.Z.; Kong, J.L.; Zhong, Y.L. The optimal method for water quality parameters retrieval of urban river based on machine learning algorithms using remote sensing images. Int. J. Remote Sens. 2023, 1–21, ahead-of-print. [Google Scholar] [CrossRef]
- Ding, S.F.; Qi, B.J.; Tan, H.Y. An Overview on Theory and Algorithm of Support Vector Machines. J. Univ. Electron. Sci. Technol. China 2011, 40, 1–10. [Google Scholar] [CrossRef]
- Dong, W.; Li, H.E.; Li, J.K.; Qin, Y.M.; Zhu, L. Analysis on water quality of severely polluted urban river, Zao River as an example. J. Hydroelectr. Eng. 2017, 31, 72–77. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications | Numerical Value |
|---|---|
| empty weight | 2.60 kg |
| loading capacity | 1.20 kg |
| boundary dimension | 279 mm |
| mm | |
| maximum flying speed | 20 m/s |
| hover time | 60 min |
| operating temperature | −20 °C~45 °C |
| Project | Numerical Value | Band | Wavelength (nm) |
|---|---|---|---|
| sensor parameter | CMOS: 1/3” global shutter | B1 | 450 ± 35 |
| sensor size | 4.80 mm × 3.60 mm | B2 | 555 ± 25 |
| resolution ratio | 1280 × 960 | B3 | 660 ± 22.5 |
| focal length | 5.20 mm | B4 | 720 ± 10 |
| field angle | HFOV: 49.60°, HFOV: 38° | B5 | 750 ± 10 |
| aperture | F/2.20 | B6 | 840 ± 30 |
| Index | DO/(mg/L) | TN/(mg/L) | Turbidity/(NTU) | COD/(mg/L) |
|---|---|---|---|---|
| Minimum value | 4.30 | 3.84 | 0.93 | 7.25 |
| Maximum value | 6.70 | 16.32 | 9.43 | 52.66 |
| Mean value | 5.91 | 11.50 | 5.47 | 25.14 |
| Standard Deviation | 0.53 | 4.12 | 1.68 | 10.76 |
| Coefficient of Variation | 0.09 | 0.36 | 0.31 | 0.43 |
| Feature Type | Variable Name | Formula | Quantity (PCS) |
|---|---|---|---|
| Single-band Feature | Band (i) | B (i) | 6 |
| Transformed-band Feature | Ln (i) | ) | 6 |
| Two-band Combination Feature | NDI (i,j) | 15 | |
| DI (i,j) | 15 | ||
| RI (i,j) | 30 | ||
| Total | 72 |
| Water Quality Type | Retrieval Model | R2 | RMSE | MRE% | Retrieval Model | R2 | RMSE | MRE% |
|---|---|---|---|---|---|---|---|---|
| DO | RF | 0.55 | 19.13 mg/L | 7.26 | Relief F-RFE-RF | 0.71 | 10.26 mg/L | 4.04 |
| SVR | 0.60 | 13.55 mg/L | 4.52 | Relief F-RFE-SVR | 0.80 | 7.19 mg/L | 2.68 | |
| LightGBM | 0.45 | 17.82 mg/L | 8.23 | Relief F-RFE-LightGBM | 0.67 | 14.60 mg/L | 6.83 | |
| TN | RF | 0.67 | 12.27 mg/L | 9.22 | Relief F-RFE-RF | 0.82 | 6.17 mg/L | 6.91 |
| SVR | 0.67 | 9.34 mg/L | 5.56 | Relief F-RFE-SVR | 0.96 | 1.14 mg/L | 2.32 | |
| LightGBM | 0.35 | 10.45 mg/L | 6.69 | Relief F-RFE-LightGBM | 0.74 | 4.80 mg/L | 5.49 | |
| Turbidity | RF | 0.54 | 15.69 NTU | 9.26 | Relief F-RFE-RF | 0.77 | 10.29 NTU | 7.36 |
| SVR | 0.60 | 13.25 NTU | 6.29 | Relief F-RFE-SVR | 0.84 | 3.15 NTU | 4.92 | |
| LightGBM | 0.43 | 16.88 NTU | 9.65 | Relief F-RFE-LightGBM | 0.73 | 12.60 NTU | 9.05 | |
| COD | RF | 0.60 | 19.58 mg/L | 11.12 | Relief F-RFE-RF | 0.84 | 10.38 mg/L | 7.12 |
| SVR | 0.62 | 11.38 mg/L | 5.55 | Relief F-RFE-SVR | 0.86 | 4.28 mg/L | 3.85 | |
| LightGBM | 0.43 | 12.66 mg/L | 5.87 | Relief F-RFE-LightGBM | 0.70 | 11.10 mg/L | 4.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Z.; Jiang, Y.; Zhang, Q.; Zhong, Y.; Wang, L. A Feature Selection Method Based on Relief Feature Ranking with Recursive Feature Elimination for the Inversion of Urban River Water Quality Parameters Using Multispectral Imagery from an Unmanned Aerial Vehicle. Water 2024, 16, 1029. https://doi.org/10.3390/w16071029
Zheng Z, Jiang Y, Zhang Q, Zhong Y, Wang L. A Feature Selection Method Based on Relief Feature Ranking with Recursive Feature Elimination for the Inversion of Urban River Water Quality Parameters Using Multispectral Imagery from an Unmanned Aerial Vehicle. Water. 2024; 16(7):1029. https://doi.org/10.3390/w16071029
Chicago/Turabian StyleZheng, Zijia, Yizhu Jiang, Qiutong Zhang, Yanling Zhong, and Lizheng Wang. 2024. "A Feature Selection Method Based on Relief Feature Ranking with Recursive Feature Elimination for the Inversion of Urban River Water Quality Parameters Using Multispectral Imagery from an Unmanned Aerial Vehicle" Water 16, no. 7: 1029. https://doi.org/10.3390/w16071029
APA StyleZheng, Z., Jiang, Y., Zhang, Q., Zhong, Y., & Wang, L. (2024). A Feature Selection Method Based on Relief Feature Ranking with Recursive Feature Elimination for the Inversion of Urban River Water Quality Parameters Using Multispectral Imagery from an Unmanned Aerial Vehicle. Water, 16(7), 1029. https://doi.org/10.3390/w16071029