

Failure Prediction of Open-Pit Mine Landslides Containing Complex Geological Structures Using the Inverse Velocity Method

Abstract
1. Introduction
2. Materials and Methods
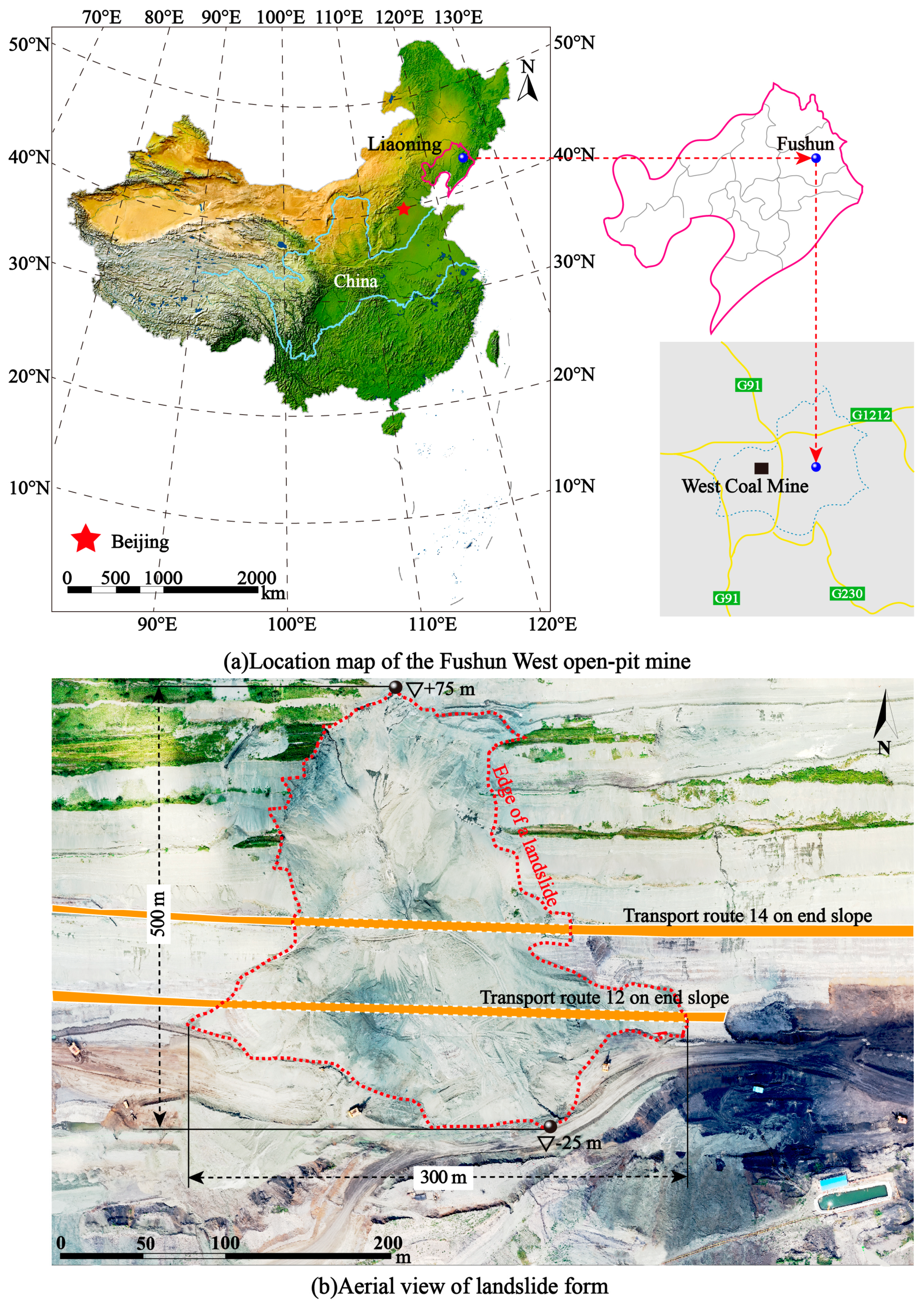
2.1. Study Area
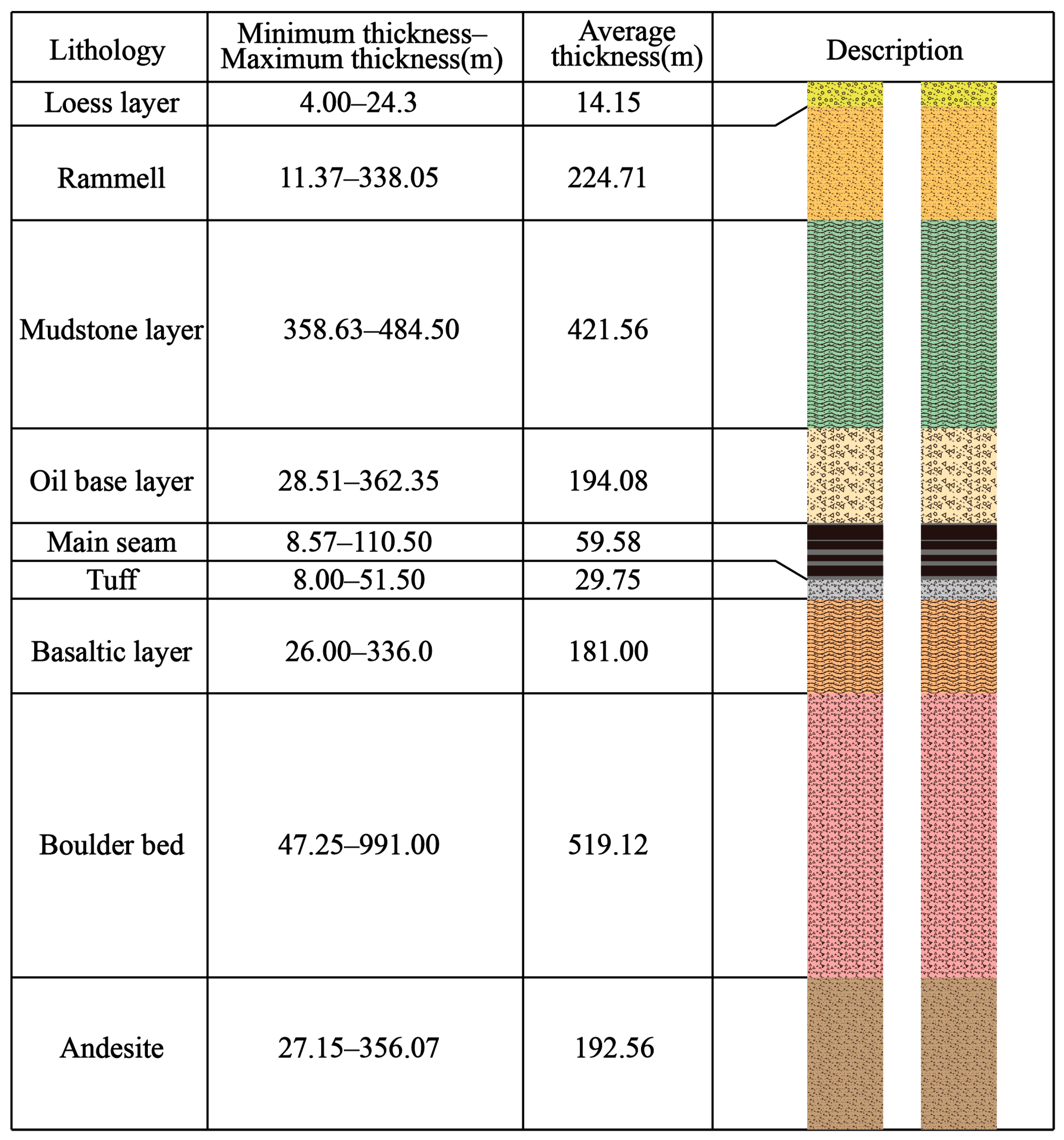
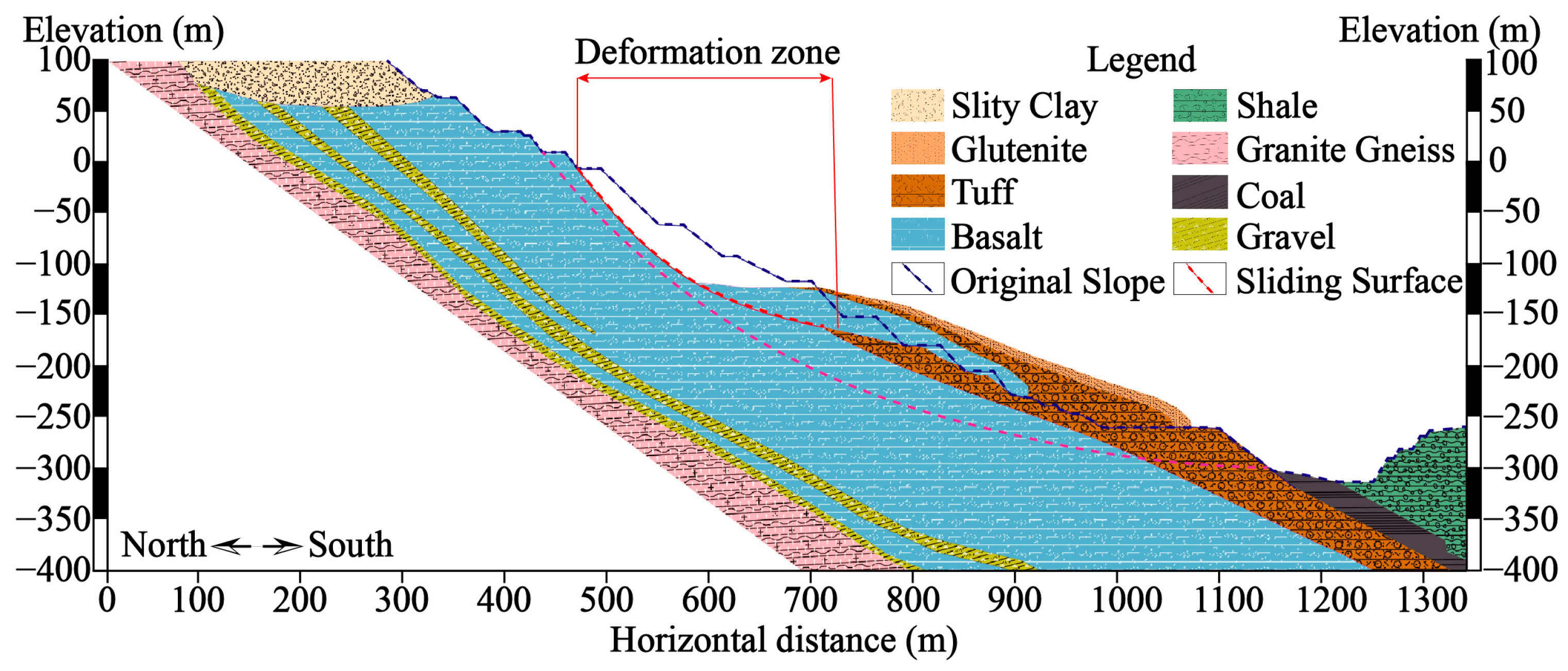
2.2. Geological Setting
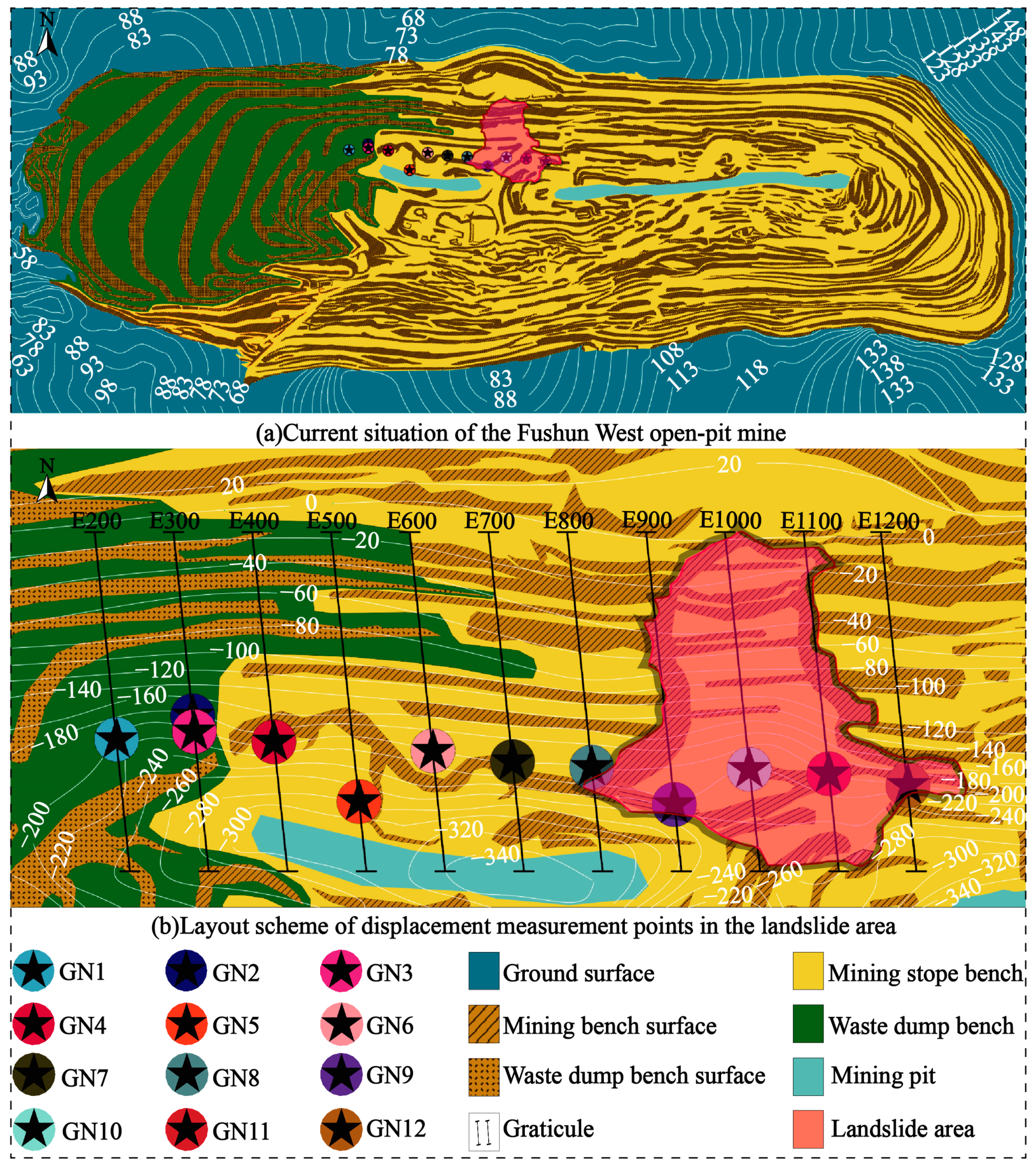
2.3. Data Description
2.4. The Basal INV Method
2.5. The Moving Average Filtering INV Method Architecture
3. Results
3.1. Slope Displacement Velocity, Acceleration, and Cumulative Displacement Analysis
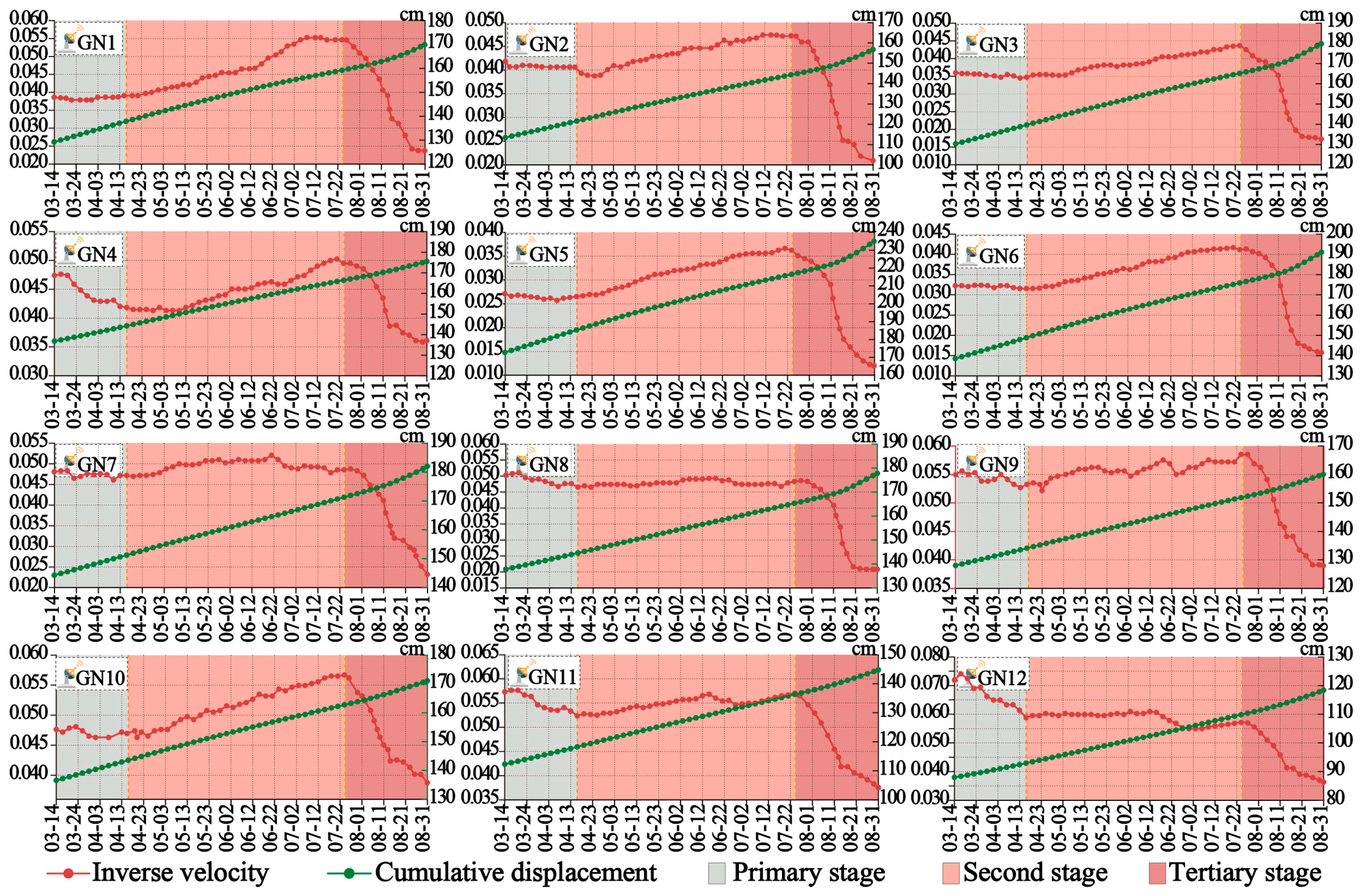
3.2. Analysis of Slope Displacement Inverse Velocity and Cumulative Displacement
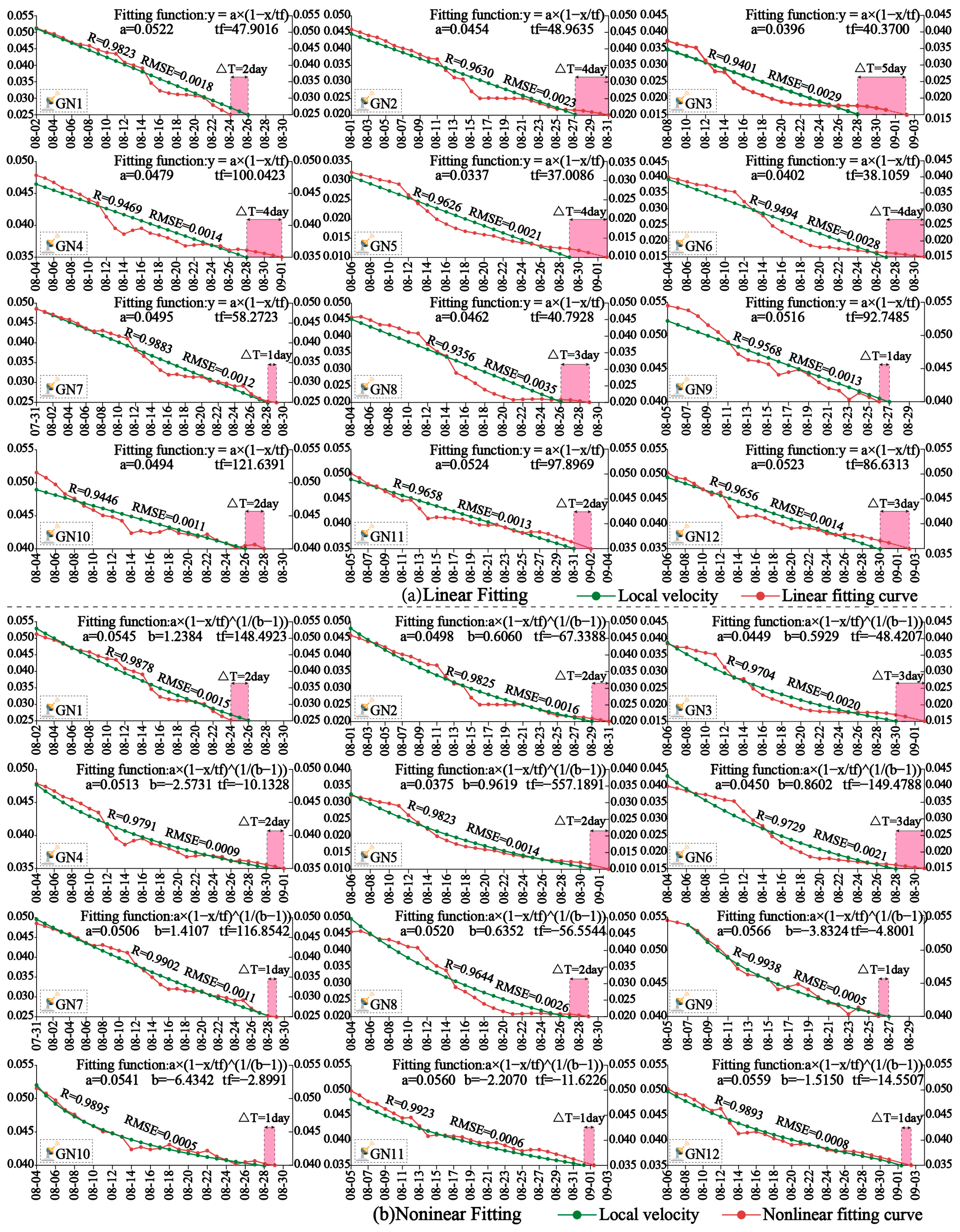
3.3. Source Velocity Data Model Analysis
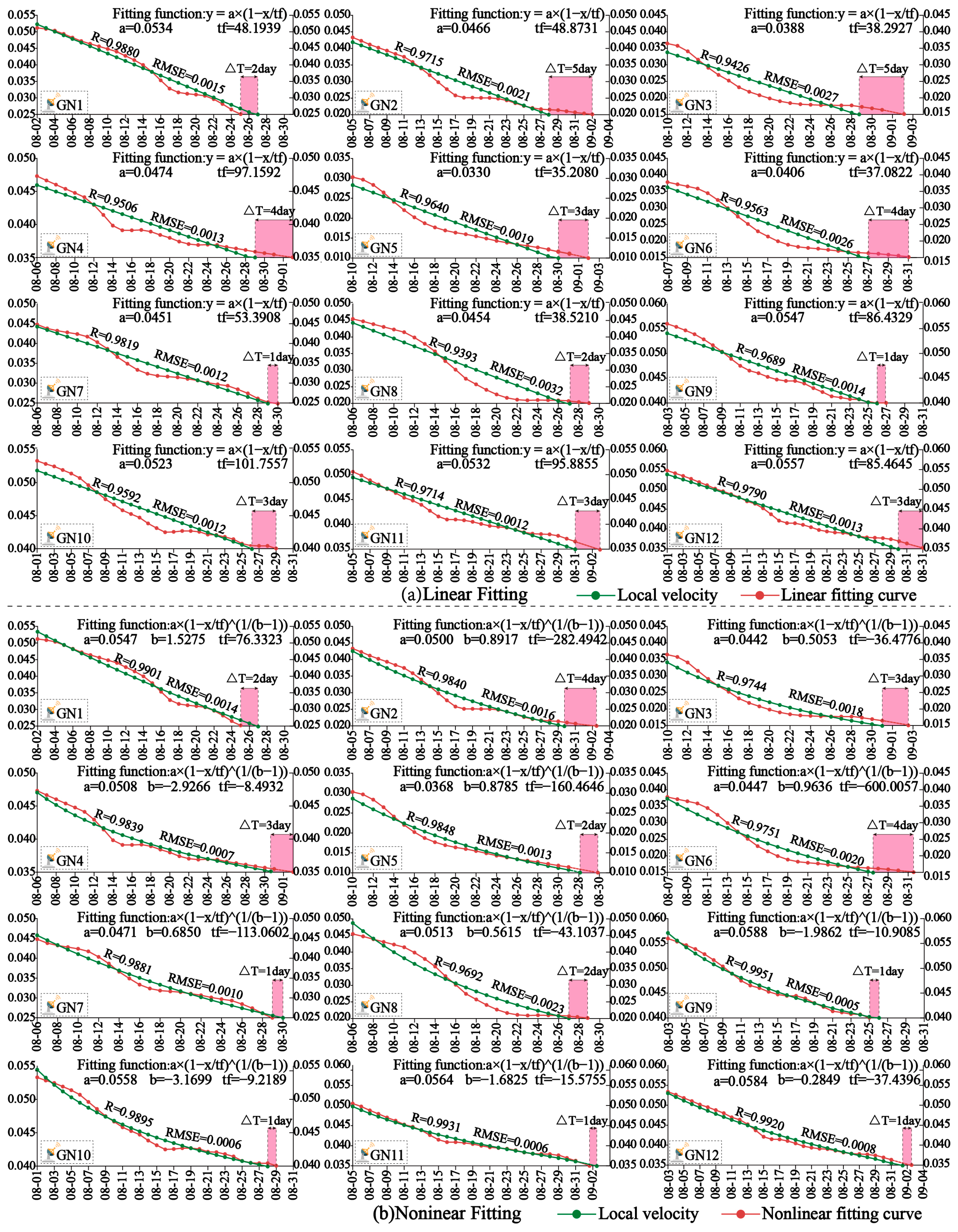
3.4. SMA Model Analysis
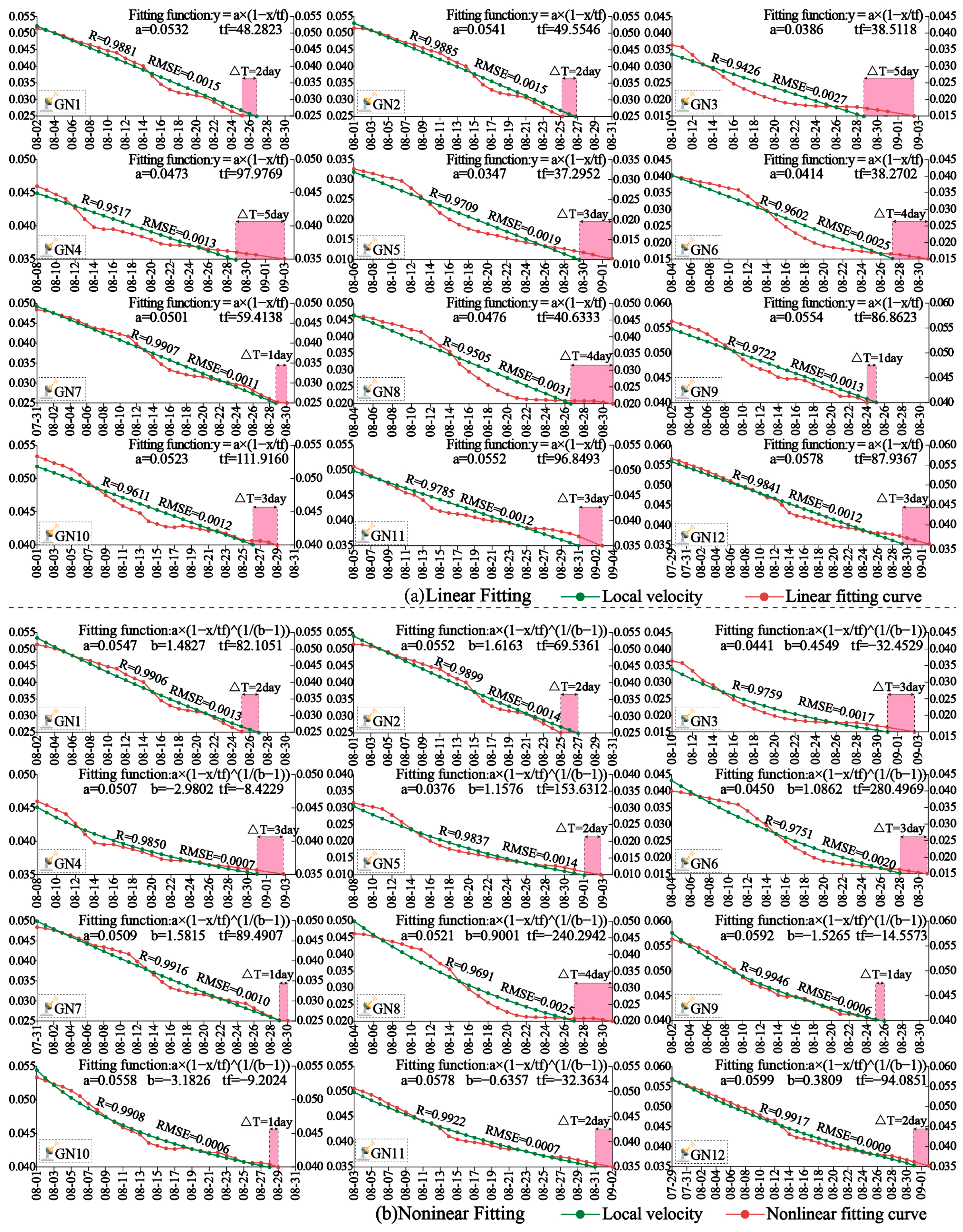
3.5. LMA Model Analysis
3.6. ESF Model Analysis
4. Discussion
5. Conclusions
- (1)
- A landslide event comprises a rather complicated process. The results show that the sliding process of a landslide can be divided into three stages based on the INV: the initial attenuation stage (regressive stage), the second attenuation stage (progressive stage), and the linear reduction stage (autoregressive stage).
- (2)
- Compared with the raw data and the exponential smoothing filter (ESF) models, the fitting effect of short-term smoothing filter (SSF) and long-term smoothing filter (LSF) in the linear autoregressive stage is better.
- (3)
- In terms of fitting accuracy, among the four models proposed in this study, the fitting accuracy of the multiplicative inverse model is the lowest, followed by the ESF model; the SMA model is better, and the LMA model is the best. In terms of prediction accuracy, ESF is the lowest among the four models, followed by the SMA model; the multiplicative inverse model is better, and the LMA model is the best.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tarolli, P.; Sofia, G. Human topographic signatures and derived geomorphic processes across landscapes. Geomorphology 2016, 255, 140–161. [Google Scholar] [CrossRef]
- López-Vinielles, J.; Ezquerro, P.; Fernández-Merodo, J.A.; Béjar-Pizarro, M.; Monserrat, O.; Barra, A.; Blanco, P.; García-Robles, J.; Filatov, A.; García-Davalillo, J.C.; et al. Remote analysis of an open-pit slope failure: Las Cruces case study, Spain. Landslides 2020, 17, 2173–2188. [Google Scholar] [CrossRef]
- Chen, J.P.; Li, K.; Chang, K.J.; Sofia, G.L.; Tarolli, P. Open-pit mining geomorphic feature characterisation. Int. J. Appl. Earth Obs. Geoinf. 2015, 42, 76–86. [Google Scholar] [CrossRef]
- Paradella, W.R.; Ferretti, A.; Mura, J.C.; Colombo, D.; Gama, F.F.; Tamburini, A.; Santos, A.R.; Novali, F.; Galo, M.; Camargo, P.O.; et al. Mapping surface deformation in open pit iron mines of Carajás Province (Amazon Region) using an integrated SAR analysis. Eng. Geol. 2015, 193, 61–78. [Google Scholar] [CrossRef]
- Tao, Z.G.; Shu, Y.; Yang, X.J.; Peng, Y.Y.; Chen, Q.H.; Zhang, H.J. Physical model test study on shear strength characteristics of slope sliding surface in Nanfen open-pit mine. Int. J. Min. Sci. Technol. 2020, 30, 421–429. [Google Scholar] [CrossRef]
- Hoek, E.; Read, J.; Karzulovic, A.; Chen, Z.Y. Rock slopes in civil and mining engineering. In Proceedings of the ISRM International Symposium, Melbourne, Australia, 19–24 November 2000. [Google Scholar]
- Bye, A.R.; Bell, F.G. Stability assessment and slope design at Sandsloot open pit, South Africa. Int. J. Rock. Mech. Min. 2001, 38, 449–466. [Google Scholar] [CrossRef]
- Obregon, C.; Mitri, H. Probabilistic approach for open pit bench slope stability analysis—A mine case study. Int. J. Min. Sci. Technol. 2019, 29, 629–640. [Google Scholar] [CrossRef]
- Carlà, T.; Farina, P.; Intrieri, E.; Botsialas, K.; Casagli, N. On the monitoring and early-warning of brittle slope failures in hard rock masses: Examples from an open-pit mine. Eng. Geol. 2017, 228, 71–81. [Google Scholar] [CrossRef]
- Ma, K.; Sun, X.Y.; Zhang, Z.H.; Hu, J.; Wang, Z.R. Intelligent Location of Microseismic Events Based on a Fully Convolutional Neural Network (FCNN). Rock. Mech. Rock. Eng. 2022, 55, 4801–4817. [Google Scholar] [CrossRef]
- Ma, K.; Yuan, F.Z.; Zhuang, D.Y.; Li, Q.S.; Wang, Z.W. Study on Rules of Fault Stress Variation Based on Microseismic Monitoring and Numerical Simulation at the Working Face in the Dongjiahe Coal Mine. Shock. Vib. 2019, 2019, 7042934. [Google Scholar] [CrossRef]
- Zhang, Z.H.; Ma, K.; Li, H.; He, Z.L. Microscopic Investigation of Rock Direct Tensile Failure Based on Statistical Analysis of Acoustic Emission Waveforms. Rock. Mech. Rock. Eng. 2022, 55, 2445–2458. [Google Scholar] [CrossRef]
- Crozier, M.J. Deciphering the effect of climate change on landslide activity: A review. Geomorphology 2010, 124, 260–267. [Google Scholar] [CrossRef]
- Carlà, T.; Nolesini, T.; Solari, L.; Rivolta, C.; Dei Cas, L.; Casagli, N. Rockfall forecasting and risk management along a major transportation corridor in the Alps through ground-based radar interferometry. Landslides 2019, 16, 1425–1435. [Google Scholar] [CrossRef]
- Liu, Z.J.; Qiu, H.J.; Ma, S.Y.; Yang, D.D.; Pei, Y.Q.; Du, C.; Sun, H.S.; Hu, S.; Zhu, Y.R. Surface displacement and topographic change analysis of the Changhe landslide on 14 September 2019, China. Landslides 2021, 18, 1471–1483. [Google Scholar] [CrossRef]
- Intrieri, E.; Carlà, T.; Gigli, G. Forecasting the time of failure of landslides at slope-scale: A literature review. Earth Sci. Rev. 2019, 193, 333–349. [Google Scholar] [CrossRef]
- Main, L.G. Applicability of time-to-failure analysis to accelerated strain before earthquakes and volcanic eruptions. Geophys. J. Int. 1999, 139, F1–F6. [Google Scholar] [CrossRef]
- Tavenas, F.L.S. Creep and failure of slopes in clays. Can. Geotech. J. 1981, 18, 106–120. [Google Scholar] [CrossRef]
- Dick, G.J.; Eberhardt, E.; Cabrejo-Liévano, A.G.; Stead, D.; Rose, N.D. Development of an early-warning time-of-failure analysis methodology for open-pit mine slopes utilizing ground-based slope stability radar monitoring data. Can. Geotech. J. 2015, 52, 515–529. [Google Scholar] [CrossRef]
- Saito, M. Forecasting the time of occurrence of a slope failure. In Proceedings of the 6th International Mechanics and Foundation Engineering, Montreal, QC, Canada, 8–15 September 1965; pp. 537–541. [Google Scholar]
- Fukuzono, T. A method to predict the time of slope failure caused by rainfall using theinverse number of velocity of surface displacement. Landslides 1985, 22, 8–13. [Google Scholar] [CrossRef] [PubMed]
- Voight, B. A method for prediction of volcanic eruptions. Nature 1988, 332, 125–130. [Google Scholar] [CrossRef]
- Voight, B. Materials science law applies to time forecasts of slope failure. Landslide News 1989, 3, 8–10. [Google Scholar]
- Rose, N.D.; Hungr, O. Forecasting potential rock slope failure in open pit mines using the inverse-velocity method. Int. J. Rock. Mech. Min. Sci. 2007, 44, 308–320. [Google Scholar] [CrossRef]
- Federico, A.; Popescu, M.; Elia, G.; Fidelibus, C.; Internò, G.; Murianni, A. Prediction of time to slope failure: A general framework. Environ. Earth Sci. 2012, 66, 245–256. [Google Scholar] [CrossRef]
- Dick, G.J.; Eberhardt, E.; Stead, D.; Rose, N.D. Early detection of impending slope failure in open pit mines using spatial and temporal analysis of real aperture radar measurements. In Proceedings of the Slope 2013: 2013 International Symposium on Slope Stability in Open Pit Mining and Civil Engineering, Perth, Australia, 25 September 2013; pp. 949–962. [Google Scholar]
- Newcomen, W.; Dick, G. An update to the strain-based approach to pit wall failure prediction, and a justification for slope monitoring. J. S. Afr. Inst. Min. Metall. 2016, 116, 379–385. [Google Scholar] [CrossRef]
- Ma, H.T.; Zhang, Y.H.; Yu, Z.X. Research on the identification of acceleration starting point in inverse velocity method and the prediction of sliding time. Chin. J. Rock. Mech. Eng. 2021, 40, 355–364. [Google Scholar] [CrossRef]
- Mufundirwa, A.; Fujii, Y.; Kodama, J. A new practical method for prediction of geomechanical failure-time. Int. J. Rock. Mech. Min. 2010, 47, 1079–1090. [Google Scholar] [CrossRef]
- Carlà, T.; Intrieri, E.; Di Traglia, F.; Nolesini, T.; Gigli, G.; Casagli, N. Guidelines on the use of inverse velocity method as a tool for setting alarm thresholds and forecasting landslides and structure collapses. Landslides 2017, 14, 517–534. [Google Scholar] [CrossRef]
- Carlà, T.; Farina, P.; Intrieri, E.; Ketizmen, H.; Casagli, N. Integration of ground-based radar and satellite InSAR data for the analysis of an unexpected slope failure in an open-pit mine. Eng. Geol. 2018, 235, 39–52. [Google Scholar] [CrossRef]
- Zhou, X.P.; Liu, L.J.; Xu, C. A modified inverse-velocity method for predicting the failure time of landslides. Eng. Geol. 2020, 268, 105521. [Google Scholar] [CrossRef]
- Chen, M.X.; Jiang, Q.H. An early warning system integrating time-of-failure analysis and alert procedure for slope failures. Eng. Geol. 2020, 272, 105629. [Google Scholar] [CrossRef]
- Chandler, R.J. Recent European experience of landslides in over-consolidated clays and soft rocks. In Proceedings of the 4th International Symposium on Landslide, Toronto, ON, Canada, 16–21 September 1984; pp. 61–81. [Google Scholar]
- Petley, D.N.; Higuchi, T.; Petley, D.J.; Bulmer, M.H.; Carey, J. Development of progressive landslide failure in cohesive materials. Geology 2005, 33, 201–204. [Google Scholar] [CrossRef]
- Troncone, A.; Conte, E.; Donato, A. Two and three-dimensional numerical analysis of the progressive failure that occurred in an excavation-induced landslide. Eng. Geol. 2014, 183, 265–275. [Google Scholar] [CrossRef]
- Main, L.G. A damage mechanics model for power-law creep and earthquake aftershock and foreshock sequences. Geophys. J. Int. 2000, 142, 151–161. [Google Scholar] [CrossRef]
- Xu, Q. Theoretical studies on prediction of landslides using slope deformation process data (in Chinese with English abstract). J. Eng. Geol. 2012, 1020, 145–151. [Google Scholar]
- Dixon, N.; Smith, A.; Flint, J.A.; Khanna, R.; Clark, B.; Andjelkovic, M. An acoustic emission landslide early warning system for communities in low-income and middle-income countries. Landslides 2018, 15, 1631–1644. [Google Scholar] [CrossRef]
- Wang, X.G.; Yin, Y.P.; Wang, J.D.; Lian, B.Q.; Qiu, H.J.; Gu, T.F. A nonstationary parameter model for the sandstone creep tests. Landslides 2018, 15, 1377–1389. [Google Scholar] [CrossRef]
- Bozzano, F.; Mazzanti, P.; Moretto, S. Discussion to: Guidelines on the use of inverse velocity method as a tool for setting alarm thresholds and forecasting landslides and structure collapses’ by T. Carlà, E. Intrieri, F. Di Traglia, T. Nolesini, G. Gigli and N. Casagli. Landslides 2018, 15, 1437–1441. [Google Scholar] [CrossRef]
- Hao, S.W.; Liu, C.; Lu, C.S.; Elsworth, D. A relation to predict the failure of materials and potential application to volcanic eruptions and landslides. Sci. Rep. 2016, 6, 27877. [Google Scholar] [CrossRef]
- Du, H.; Song, D.Q.; Chen, Z.; Guo, Z.Z. Experimental study of the influence of structural planes on the mechanical properties of sandstone specimens under cyclic dynamic disturbance. Energy Sci. Eng. 2020, 8, 4043–4063. [Google Scholar] [CrossRef]
- Huang, J.; Liu, X.L.; Zhao, J.; Wang, E.Z.; Wang, S.J. Propagation of stress waves through fully saturated rock joint under undrained conditions and dynamic response characteristics of filling liquid. Rock. Mech. Rock. Eng. 2020, 53, 3637–3655. [Google Scholar] [CrossRef]
- Kilburn, C.R.J. Forecasting volcanic eruptions: Beyond the failure forecast method. Front. Earth Sci. 2018, 6, 133. [Google Scholar] [CrossRef]
- Dempsey, D.E.; Cronin, S.J.; Mei, S.; Kempa-Liehr, A.W. Automatic precursor recognition and real-time forecasting of sudden explosive volcanic eruptions at Whakaari, New Zealand. Nat. Commun. 2020, 11, 3562. [Google Scholar] [CrossRef]
- Xu, C.; Liu, X.L.; Wang, E.Z.; Wang, S.J. Prediction of tunnel boring machine operating parameters using various machine learning algorithms. Tunn. Undergr. Space Technol. 2021, 109, 103699. [Google Scholar] [CrossRef]
- Petley, D. Global patterns of loss of life from landslides. Geology 2012, 40, 927–930. [Google Scholar] [CrossRef]
- Terzaghi, K. Mechanism of Landslides. In Application of Geology to Engineering Practice; Paige, S., Ed.; Geological Society of America: Boulder, CO, USA, 1950. [Google Scholar] [CrossRef]
- Bozzano, F.; Cipriani, I.; Mazzanti, P.; Prestininzi, A. A field experiment for calibrating landslide time-of-failure prediction functions. Int. J. Rock Mech. Min. Sci. 2014, 67, 69–77. [Google Scholar] [CrossRef]
- Segalini, A.; Valletta, A.; Carri, A. Landslide time-of-failure forecast and alert threshold assessment: A generalized criterion. Eng. Geol. 2018, 245, 72–80. [Google Scholar] [CrossRef]
- Osasan, K.S.; Stacey, T.R. Automatic prediction of time to failure of open pit mine slopes based on radar monitoring and inverse velocity method. Int. J. Min. Sci. Technol. 2014, 24, 275–280. [Google Scholar] [CrossRef]
- Benoit, L.; Briole, P.; Martin, O.; Thom, C.; Malet, J.P.; Ulrich, P. Monitoring landslide displacements with the Geocube wireless network of low-cost GPS. Eng. Geol. 2015, 195, 111–121. [Google Scholar] [CrossRef]
- Samodra, G.; Ramadhan, M.F.; Sartohadi, J.; Setiawan, M.A.; Christanto, N.; Sukmawijaya, A. Characterization of displacement and internal structure of landslides from multitemporal UAV and ERT imaging. Landslides 2020, 17, 2455–2468. [Google Scholar] [CrossRef]
- Chae, B.G.; Park, H.J.; Catani, F.; Simoni, A.; Berti, M. Landslide prediction, monitoring and early warning: A concise review of state-of-the-art. Geosci. J. 2017, 21, 1033–1070. [Google Scholar] [CrossRef]
- Pecoraro, G.; Calvello, M.; Piciullo, L. Monitoring strategies for local landslide early warning systems. Landslides 2019, 16, 213–231. [Google Scholar] [CrossRef]
- Abdulwahid, W.M.; Pradhan, B. Landslide vulnerability and risk assessment for multi-hazard scenarios using airborne laser scanning data (LiDAR). Landslides 2017, 14, 1057–1076. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Monitoring Point | The Initial Stage | The Second Stage | The Third Stage | |||
|---|---|---|---|---|---|---|
| Start | End | Start | End | Start | End | |
| GN1-E200-200 | 28 June | 15 July | 16 July | 11 August | 12 August | 31 August |
| GN2-E300-184 | 12 July | 13 July | 10 August | 11 August | ||
| GN3-E400-200 | 22 July | 23 July | 10 August | 11 August | ||
| GN4-E400-188 | 21 July | 22 July | 10 August | 11 August | ||
| GN5-E500-280 | 22 July | 23 July | 10 August | 11 August | ||
| GN6-E500-200 | 24 July | 25 July | 10 August | 11 August | ||
| GN7-E600-200 | 22 July | 23 July | 10 August | 11 August | ||
| GN8-E700-200 | 18 July | 19 July | 10 August | 11 August | ||
| GN9-E800-232 | 22 July | 23 July | 9 August | 10 August | ||
| GN10-E900-220 | 22 July | 23 July | 12 August | 13 August | ||
| GN11-E1000-200 | 16 July | 17 July | 11 August | 12 August | ||
| GN12-E1200-200 | 14 July | 15 July | 11 August | 12 August | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, Y.; Zhang, R.; Du, H. Failure Prediction of Open-Pit Mine Landslides Containing Complex Geological Structures Using the Inverse Velocity Method. Water 2024, 16, 430. https://doi.org/10.3390/w16030430
Tao Y, Zhang R, Du H. Failure Prediction of Open-Pit Mine Landslides Containing Complex Geological Structures Using the Inverse Velocity Method. Water. 2024; 16(3):430. https://doi.org/10.3390/w16030430
Chicago/Turabian StyleTao, Yabin, Ruixin Zhang, and Han Du. 2024. "Failure Prediction of Open-Pit Mine Landslides Containing Complex Geological Structures Using the Inverse Velocity Method" Water 16, no. 3: 430. https://doi.org/10.3390/w16030430
APA StyleTao, Y., Zhang, R., & Du, H. (2024). Failure Prediction of Open-Pit Mine Landslides Containing Complex Geological Structures Using the Inverse Velocity Method. Water, 16(3), 430. https://doi.org/10.3390/w16030430