Abstract
A field assessment was carried out in May 2023 in a natural protected area in South Italy to investigate the real-time behavior and fate of common marine litter items at different depths at the nearshore and foreshore under low energetic conditions. The field data were also compared with theoretical values calculated using theoretical formulations considering the Stokes drift current, wind-induced current, and current at breaking position. The wind approached from N to W, with values ranging from 2.4 to 3.8 m/s. The propagated significant wave height ranged from 14 to 21 cm, with an associated period of 3 s. Items with a positive buoyancy recorded different velocities. Very protruding (above water surface) items were greatly affected by windage and recorded velocities from 0.23 to 0.33 m/s; higher than the theoretical values that do not take into account windage. Theoretical values correctly predicted the velocity of other less-protruding items but slightly underestimated the velocity of neutral buoyancy items, evidencing in both cases the low relevance of the Stokes drift current. Items with a negative buoyancy moved (or not) in the bottom with different velocities. Different behaviors were observed at the breaking point, where items surfed (or not) spilling breaking waves, and at the foreshore, where items moved along the plunge step or in a “zig–zag” movement due to a swash–backwash process.
1. Introduction
Marine litter, defined as “any persistent, manufactured or processed solid material disposed of or abandoned in the marine and coastal environment” [1], is ubiquitous in the oceans and seas of the world [2,3]. Litter negatively affects wildlife, e.g., because of the potential entanglement of marine mammals, turtles, birds, and fishes in abandoned fishing lines, ropes and nets [4,5], and ecosystems. Floating litter works as transport platforms that can favor the spread of invasive alien species [6] and dangers to human health, e.g., dangerous items can cause injuries and cuts [7]. Furthermore, marine litter has important economic impacts, since it affects the aesthetic quality of coastal areas, resulting in lost tourist days [8,9].
Most marine litter (80%) is related to land-based sources, e.g., it is transported into marine environments by rivers, run-off waters, illegal dumping, wind, etc. Alternatively, it can be abandoned/lost on the beach by visitors, and the remaining amount (20%) is related to marine-based sources, e.g., shipping, fishing activities, and oil/gas off-shore extraction [10]. Circa 70% of the total amount of litter that enters the oceans and seas ends up on the sea bottom, 15% floats in water columns and the ocean surface, and 15% is stranded on coastal environments [11]. Plastics are usually the most abundant items, and because of their low densities and extended lifespan, they are able to travel long distances from their source areas [12]. In the marine environment, the distribution and fate of floating litter is conditioned by marine and atmospheric forces such as currents, turbulence processes, and wind, and by litter buoyancy properties [12,13,14]. In the absence of vertical mixing processes in the sea, the buoyancy of litter items and, therefore, their behavior, transport, and fate, is essentially linked to the relationship between their average densities and seawater density, approximately 1.03 g cm−3, and to the volumes and shapes of litter items that determine the amount of biofouling able to develop on their surface [12]. In the absence of biofouling, positive buoyancy is recorded when litter density is less than that of seawater, as observed for many single-use plastic objects, food wrappers, and other objects composed of low-density polymers such as packaging, e.g., polyethylene, 0.92–0.98 cm−3 and polypropylene, 0.86 g cm−3 [15]. Heavy items such as sealed bottles, cans, floats, etc., which are composed of glass, rubber, metal, and heavy plastic polymers (e.g., PET, 1.06 g cm−3; polyamide, 1.2 g cm−3; and polystyrene, 1.37 g cm−3) show positive buoyancy only when they contain trapped air [16].
Therefore, according to Ryan [12], items are able to: (i) float protruding well above the surface, e.g., bottles, lightbulbs, aerosol cans, expanded polystyrene, and other foamed plastics; (ii) float at the surface without significant windage; and (iii) stay completely submerged. In the first case, wind is the main transport mechanism, and large protruding items move along the water’s surface in directions dissimilar to those of waves and prevailing currents [12,17]. According to Ruiz et al. [18], the lack of observational data on the effects of wind on floating litter is one of the most relevant limitations to parameterizing the effects of windage and accurately predicting objects’ behavior. The second case reflects the behavior of litter items that present neutral buoyancy and float almost submerged below the surface. Such items are mainly driven by currents and are therefore likely not significantly affected by Stokes drift [18,19]. In the third case, litter items can drift up and down in the water column due to different processes (e.g., turbulence, fouling relevance, etc. [20,21]) and are essentially transported by marine currents, or they can sink to the seafloor [12].
This paper provides a first attempt to describe the real-time behavior and fate of several common litter items at different depths in the nearshore and at the foreshore under low energetic conditions (wind and waves) and to relate measured data to theoretical values obtained considering the Stokes drift current, the wind-induced current, and the current under breaking conditions. The field assessment was carried out at Torre Guaceto beach, a natural protected area located in the province of Brindisi (South Italy). The area is characterized by a high natural and ecological value, and for this reason, several studies have investigated the presence of litter items along the beach in order to provide an overall environmental characterization [22,23,24]. Nevertheless, until now, no datasets regarding the characterization of marine litter item displacement along the coastline have been available. The results obtained in this paper are of broad interest and constitute a first approximation that is useful for predicting the behavior and fate of common marine litter items with similar buoyancy characteristics anywhere under comparable wind and wave characteristics. Finally, this paper enlarges the very sparse existing database on field observational data. Therefore, the obtained results are useful for supporting future investigations devoted to the modeling of marine litter behavior [18].
2. Study Area
The investigated area falls into a coastal sector that is included in the Torre Guaceto site, a marine protected area (MPA) on the Adriatic flank of the Apulian Region in Italy. The site represents a highly sensitive area in terms of coastal habitats and ecological relevance. For this reason, a special protection area (IT9140008 “Torre Guaceto”) and site of community importance (IT9140005 “Torre Guaceto e Macchia San Giovanni”) were established in 2000. The site is also a renowned goal for tourist activities and beachgoers during the summer holidays; therefore, the marine environment inside the MPA has been divided in three marine zones with gradual increases in access constraints (Zone C, Zone B, and Zone A—Figure 1). The current coastal morphology of the Torre Guaceto site has been gradually shaped by several events of marine transgression/regression cycles that occurred during the Middle–Late Pleistocene period [25]. The Adriatic Apulian beaches are affected by the sediment supplies of the Ofanto river, which are subsequently redistributed by the predominant NW–SE longshore current [26]. This coastal sector, which is a microtidal environment with a narrow foreshore area, is influenced by winds that blow from the NNW and ESE directions and strongly influence wave patterns. The beach sector analyzed in this paper is located 200 m north of the Canale Reale mouth. This stream, 48 km long, crosses between the Murge plateau and the Taranto–Brindisi plain [27,28] to reach the Adriatic Sea through the MPA carrying a considerable amount of litter, a trend common to other rivers/streams worldwide [29].
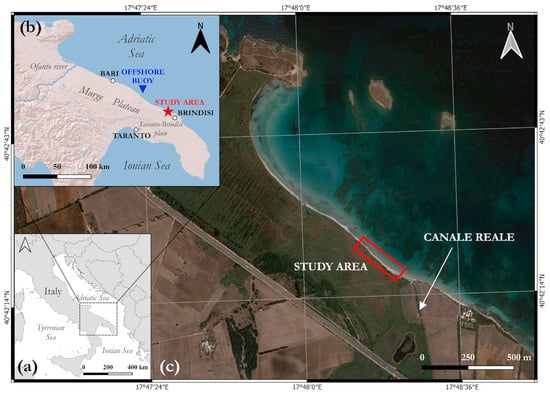
Figure 1.
(a) Location map of the study area; (b) different levels of protection; (c) the area investigated in this paper.
3. Materials and Methods
Intensive field work was carried out on 23 and 25 May 2023 during a survey program performed within the framework of a collaboration agreement established among different research groups. The aim of this collaboration was to determine beach litter amounts and characteristics, with special attention to plastic polymers, by means of both direct measures and innovative survey procedures. In this paper, the real-time movement, behavior, and fate of select common marine litter items [30,31] in the nearshore and foreshore of the study area under low energetic conditions is described. The used items are described in Table 1 and illustrated in Figure A1. Each item was used several times to investigate its behavior at different points: at 0.2, 0.5, and 1 m water depths, on 23 May (points no. 1, 2, and 3), and at the foreshore, i.e., the beach face that is affected by swash–backwash processes, on 25 May (point 0, Figure 2). The characteristics of analyzed points, namely their depth and location, did not change during the experiment because the coast is a microtidal environment, e.g., the position of the swash–backwash process does not shift along the foreshore area.

Table 1.
Litter items used in the experiment.

Figure 2.
Sketch of the experiment carried out at Torre Guaceto, Brindisi (Southern Italy). Depicted items are not to scale.
The velocity of displacement of the investigated items was calculated by two observes at each surveyed point (Figure 2), considering the time that each item required to cover a 4 m transect. The displacement velocity of each item was measured at different times depending on the behavior of the considered item, i.e., when the item recorded a clear trend and very similar velocities. Three replicates were carried out, and an average value was obtained. If the considered item did not record a clear trend, more replicates were carried out. The orientation of the transects was established according to the approaching directions of the forcing agents; i.e., they were established parallel to the wind direction and normal to the wave fronts. The items were divided into the following categories:
- (i)
- (ii)
- Neutral buoyancy items: items that floated just below the water surface; i.e., a bottle cap and a plastic glass (Table 1);
- (iii)
- Items with negative buoyancy: items that sank and moved (or not) on the sea bottom; i.e., a plastic bottle completely filled with sea water (Table 1 and Figure A1). At the foreshore, point 0, the behavior of a cigarette butt and a cotton bud that presented a negative buoyancy was also assessed (Table 1 and Figure A1).
During the experiment, the wind velocity and direction was surveyed using a handheld digital anemometer with a precision of 5% that was calibrated in previous field assessments. The wave height and period were obtained using a Monopoli offshore buoy (LAT 40°58′30″ N, LON 17°22′0″ E) owned by the Italian Institute for the Environmental Protection and Research (ISPRA), which collected data with a time interval of 30 min. The SWAN (simulating waves nearshore, [32,33]) has been used to calculate the significant wave height and period of the wind waves at each point of the domain by applying JONSWAP spectra [34]. Spatial domains were obtained using a regular grid with a cell resolution of 10 × 10 m an area of 4 × 1.6 km, as shown in Figure A2. The bathymetric data were interpolated within the cells of the grids, using the moving average as the interpolation method. Digital terrain models (DTMs) obtained through bathymetric LiDAR were used for the offshore area beyond the closure depth, and MIVIS data were used for the nearshore area [25].
At the open boundary condition, significant wave heights (Hm0), peak periods (Tp), and direction of propagation of wind waves were obtained by extrapolating the values recorded by the Monopoli buoy (Figure 1). These values were 0.32 m for the height, 3 s for the period T, and 110 degrees for the direction of propagation with respect to north. A map of the significant wave height (HS) is shown in Figure A2.
A mechanical current meter was used to acquire the marine current velocity. It was installed at 0.25 cm from the sea bottom at points no. 2 and no. 3 and at the bottom, point no. 1 (Figure 2). Surface drift trajectories involve numerous processes that are still not well known. The most commonly used approach assumes that when the tidal velocity and nonlinear interactions are not significant, a drifting object is influenced by a linear combination of velocities involving the Stokes drift and the wind-induced currents as follows:
where Ust is the Stokes drift vector current and Uw is the local wind-induced velocity. In this paper, Ust was calculated, taking into account the linear theory from the orbital velocity, as follows:
where w is the wave frequency, a is the amplitude, and k is the wave number. However, in a very shallow water environment, kh << 1, and the velocity may be simplified as follows:
UT = Ust + Uw
The wind stress produces variations in the current velocity with depth. According to the “law of wall” [35,36]:
The above shows the logarithmic decrease in velocity with depth, since z is negative. Furthermore, u0 is the velocity current at z = 0, which may be considered as 3% of the wind velocity in z = 10 m, W10, and u0 = 0.03W10. The friction velocity u* is obtained from experimental calculations [37] as u* = 0.0012W10, and the roughness length z0 = 0.05 cm/s.
When the windage on the surface is considered, the velocity for positive-buoyancy objects may be corrected as:
where Cw is a complex factor that controls the direct contribution of the local wind effect on the object and depends, among others, on the size of the object and the buoyancy. It is commonly obtained as an experimental parameter.
U = UT + Cw W10
For the experiments in the surf zone, were also considered the calculations associated with the breaking current velocity in this area as an alternative to the Stokes drift current. According to Longuet-Higgins [38], this current can be rewritten as:
where Ud is calculated as follows:
U = Ud
Ud is the current at the breaking conditions, Cr = 0.001 is the drag coefficient, is the phase propagation velocity, is the angle of incidence of wave fronts, and γ = 0.8.
4. Results and Discussion
4.1. Forcing Factors
The wind velocity and approaching direction, wave height and period, and measured and theoretical current velocities at each point are presented in Table 2.
Table 2.
Wind, wave, and current data obtained at the different points (cf. Figure 2).
On both days, the wind approached from N to NW, locally called Maestrale, with a low intensity that ranged from 2.4 m/s (on 25 May) to 3.8 m/s (on 23 May). The wave fronts approached from the N, forming a 30° angle with the shoreline (Figure 2). The propagated significant wave height data presented values ranging from 14 to 21 cm with an associated period of 3 s and confirmed the visual observations carried out during the field assessment.
Furthermore, a comparison between the recorded current meter velocity values and the predicted theoretical values is shown in Table 2. The items’ velocities recorded at each investigated point are reported in Table 3.
Table 3.
Velocities recorded using the investigated items at each analyzed point, presented in m/s and as a percentage of wind velocity. The main forcing agent/predominant process at each point and the number of replicates/trials (in parenthesis) carried out per item at each point (Figure 2) are also indicated.
No data were available for point 0, since at this point, it was not possible to install the current meter due to the very limited water depth. There were also no data available for point no. 3 because the very low velocities recorded by the current meter were within the accuracy of the instrument. Such low values are in accordance with the low Uw and Ust predicted values for this point (Table 2). The interpretation of the data recorded at point nos. 1 and 2 is linked to the limitations of the used theoretical formulations and the complex conditions observed during the field measures. Despite the above, it is important to highlight that the recorded values were within the same order of magnitude of the calculated Uw and Ust (Table 2). At point no. 2, the measured current presented values of 0.034 m/s showed a clear wave front normal component (Table 2); this is in accordance with the predicted Ust value (0.04 m/s) linked to the orbital wave velocity (that is normal to wave fronts).
4.2. Marine Litter Behavior and Fate
The behavior of litter items was essentially controlled by their floating properties and forcing factors; i.e., wind, waves, and currents, as observed by Andrady [21], Duhec et al. [17], and Ryan [12]. Therefore, the behavior/fate of the different litter items was described according to their buoyancy, distinguishing items that showed: (i) a positive buoyancy, i.e., floating and protruding well above the water surface, which were therefore significantly affected by wind; (ii) neutral buoyancy, i.e., floating just below the water surface level without significant windage; and (iii) negative buoyancy, i.e., laying/moving on the sea bottom (Table 1). In the following sub-paragraphs, the behavior of each items category is discussed in detail.
4.2.1. Positive Buoyancy Items
This group included an empty plastic bottle, a partially water-filled plastic bottle, and an empty glass bottle (Table 3 and Figure A1). Similar results were obtained at all the surveyed points, outlining a general common trend, with differences observed at places due to the relevance of wave-breaking processes (point no. 1) or swash–backwash processes (point 0, Figure 2).
The plastic empty bottle, a water bottle with a volume of 500 mL, protruded ca. 5 cm from the water surface, and at points nos. 0 (when not entered in the swash–backwash zone), 2, and 3 (Table 3 and Figure 3a), it moved according to the wind direction with relatively constant velocity values that ranged from 0.23 to 0.33 m/s. The plastic bottle velocity, expressed as a percentage of the wind velocity, ranged from 6.8% to 9.5% (Table 3). Conceptually, the bottle was affected by (i) the Stokes drift, linked to the orbital velocity (Equation (3)) that generates a movement normal to wave fronts; in this case, the value was very small (Ust = 0.04–0.05 m/s) due to the low wave amplitude, and it did not fit with the recorded data; and (ii) the water surface current (Equation (4)) that flowed in the same direction of the wind. Under such conditions, every object at the water level is expected to move at the same velocity as the water current. Equation (5) gives a velocity value (0.11 m/s) that is lower than the observed bottle velocities. This is due to the fact that the equation does not take into account the windage effects on the bottle. In this case, the “law of wall” applied to the wind velocity at a height of 5 cm with respect to the sea surface, predicting an impact of windage on the bottle generating a velocity of ca. 3% of wind velocity (W10); i.e., approximately 0.1 m/s. Therefore, it is clear that, as observed at other areas by Ruiz et al. [18], highly buoyant items are driven along the water surface through wind effects. Considering Cw as an adjustment parameter, its value for this experiment can be approximated to ca. 5%, obtained considering the total average recorded bottle velocity (8% of the wind velocity) and the 3% component already considered in Equation (4). These results, obtained for an empty plastic bottle protruding ca. 5 cm from the water surface, are in accordance, for example, with the values proposed by Ruiz et al. [18] for buoys with high-buoyancy capacities. Furthermore, in this case, the relevance of windage versus the Stokes drift is plausible and enhanced by the low significant wave height recorded during the field assessment. Indeed, more precise expression of this parameter requires a larger set of experiments with different object sizes, forms, buoyancies, and wind conditions. Such results also coincide with the observations of Duhec et al. [17] and Isobe et al. [39], who claim that wind may enhance the dispersion of highly buoyant items (proceeding from rivers) protruding well above the water surface. Such effect is greater than the Stokes drift and dominant water current flow [12].
A different behavior of the plastic empty bottle was observed under breaking conditions (point no. 1), where the item—depending on the exact breaking position and timing—was able to surf waves that broken in spilling, moving clearly onshore with a velocity of 0.7 m/s (Supplementary Material Video S1). In this case, from a theoretical point of view, the bottle velocity should coincide with the wave breaking current. This was confirmed by the results of Equations (6) and (7), which showed values of 0.67 m/s (Table 3). Therefore, under spilling breaking conditions, the bottle moves with the wave breaking current. The theoretical equation works quite well, highlighting the low relevance, in this case, of the wind-induced current.
Lastly, a different behavior was also sometimes observed at point 0 on the beach face, when, most times, the bottle moved according to a “zig–zag” movement, linked to the swash–backwash process, with an average velocity of 0.08 m/s (Table 3). The bottle moved onward with the swash and seaward with the backwash. Its high buoyancy allowed the bottle to surf the swash even when it was very thin; therefore, the bottle was able to arrive significantly inland onto the beach face, where in may have become stranded. Nevertheless, because of its high buoyancy, the following swash events were at times able to remobilize the bottle, restarting its “zig–zag” movement.
The partially filled plastic bottle and the glass bottle (Table 1) presented similar trends, since they were not protruding significantly (2–3 cm) from the water’s surface. The two items moved according to the wind direction with equal or very similar velocities at point nos. 2 and 3 (Table 3).
In this case, the windage effect is lower with respect to the previous case because the two items considered did not protrude significantly from the water surface and the theoretical predicted velocities (Equation (4)) were very close to observed data, i.e., 0.11 m/s (Table 3). The Stokes drift presented very low values and therefore was not relevant (Table 3), as observed in similar cases by Isobe et al. [39].
Under spilling breaking conditions (point no. 1), the plastic partially filled bottle moved landward, i.e., perpendicular to the waves, with an average velocity of 0.05 m/s. That is, it surfed on different consecutive wave fronts; i.e., it was transported landward by a wave crest and was then abandoned and again carried onward by the following approaching wave crest. The glass empty bottle experienced two types of behavior: (i) it moved parallel to the shore according to the wind direction, with an average velocity of 0.10 m/s; i.e., 3.4% of the wind velocity, and (ii) it moved shoreward (surfing) with a velocity of 0.02 m/s (Table 3). Neither of the two items was able to remain time on the same wave crest for a significant amount of time (as was the case for the empty plastic bottle); therefore, their velocities were not constant and were overall slower than the velocity experienced by the empty plastic bottle.
At the foreshore, point 0, the two items again showed similar behaviors: they moved along the swash–backwash zone with similar velocities, 0.04 and 0.05 m/s (Table 3), and they usually remained where the swash presented a certain thickness. Therefore, the backwash was able to transport them seaward. As a consequence, they only stranded on the beach face in very few cases. Their remobilization by the wash events was more difficult compared to the previous case due to their low buoyancy.
4.2.2. Neutral-Buoyancy Items
The items in this category, i.e., the bottle cap and glass bottle (Table 1 and Figure A1), showed neutral buoyancies, as they were floating just below the water surface without experiencing significant windage. They presented a similar trend and moved parallel to the shore according to the wind-generated current without experiencing windage. They were immediately filled with sea water and remained at the water surface. The cap floated better than the plastic glass, which sometimes moved up and down in the water column. At all the points, excluding the foreshore (point 0), the bottle cap presented similar velocity values, ranging from 0.06 to 0.09 m/s, which corresponded to 1.6% and 2.3% of the wind velocity, respectively. The plastic glass velocity was slightly smaller, ranging from 0.06 to 0.07 m/s, which corresponded to 1.5% and 2.0% of the wind velocity, respectively (Table 3). Overall, the items were not affected by the Stokes drift or the breaking process. Instead, they moved because of the wind-generated current at a slower velocity compared with the items with a positive buoyancy. At all these locations, the results obtained are in good agreement with the theoretical wind-induced surface current Uw (at z = z0) that generates velocities within the range of 0.09–0.11 m/s. The velocity of the plastic glass was lower because it moved below the surface and along the water column, where wind induced current exponentially decreases. Due to small wave amplitude, the Stokes drift current did not exceed 0.04 m/s. These results confirm that in situations of neutral buoyancy, the theoretical wind-induced current velocity at the surface is a useful indicator of the observed field behavior.
At the foreshore, the two items still presented similar behaviors and moved in a “zig–zag” because they were transported onshore by the swash and seaward by the backwash. The cap floated better than the plastic glass and presented a greater average velocity (0.08 m/s) compared to it (0.02 m/s); see Table 3 and Supplementary Material Video S2. Because of their irregular shape, they were frequently stranded on the beach face, and their remobilization was difficult.
4.2.3. Negative-Buoyancy Items
This category included a plastic water bottle completely filled with sea water, a cotton bud, and a cigarette butt (Table 1 and Figure A1), which sunk to the bottom and moved (or not) according to different processes. The plastic bottle completely filled with seawater presented a different behavior that was linked to its own characteristics and the effects of the forcing factors. The effects of bottom friction are often predominant, and current velocities do not reach critical levels to provide drag. These effects depend on the nature and size of the object and require a minimum critical current velocity to initiate movement and overcome the friction processes. The bottle did not experience any movement at a water depth of 1 m, i.e., point no. 3. This was because the surveyed and predicted currents related to the waves and wind were too weak (Table 2 and Table 3). At point no. 2, i.e., at a water depth of 0.5 m (Figure 2), the filled plastic bottle on the bottom moved shoreward, perpendicular to wave fronts at an average velocity of 0.02 m/s. This represented 52.9% of the bottom current recorded by the current meter and was close to the predicted Ust values (Table 2 and Table 3 and Figure 3a).
At the breaking point (survey point no. 1, Figure 2), the bottle moved on the bottom in a direction parallel to the shore because of the longshore component of the wave fronts, with an average velocity of 0.05 m/s in accordance with the measured current velocity and direction (Table 2 and Table 3 and Figure 3b).
At the foreshore, no movement was observed. At this point, the friction effects are predominant over the range of the observed and calculated currents, especially due to the low energetic conditions observed during the field measures. The cotton bud and the cigarette butt presented similar behaviors. For a few minutes, the items floated and moved along the swash–backwash zone, with an average velocity of 0.017 m/s. At times, they were stranded on the beach face. When they were water saturated, the items sunk to the bottom (Figure 3c), and both moved along the shore (remaining in the plunge step) with a very similar velocity (0.05 and 0.06 m/s, Table 3). Their behavior was very similar to that recorded for fragments of leaves of Posidonia Oceanica that also moved along the plunge step (Figure 3d).
5. Conclusions
In this paper, the real-time movement, behavior, and fate of a few common marine litter items in the nearshore and foreshore under low energetic conditions is described.
The experimental data obtained from the field surveys carried out in May 2023 at Torre Guaceto beach (Brindisi, Southern Italy) were compared with theoretical approaches based on the fact that items with neutral and positive buoyancy are expected to move at the same velocity of the surface sea current. This approach constitutes a first and simple interpretation of the mechanisms involved in the movement of litter items. The main limitations are highlighted when items are affected by other forces.
In detail, the results show that positive-buoyancy items presented similar behaviors and fates. When they moved offshore of the breaking zone, they were mostly affected by windage, especially the high-buoyancy items that recorded a Cw value of 5%; i.e., the real-time measured velocity was approximately 8% of the wind velocity. Therefore, their velocity was overestimated compared to the surface currents, which suggests the need for continued advancements in the study and theoretical analyses to obtain a general theoretical parameterization.
The displacement velocity of the low-buoyancy items was within the theoretical predicted value, i.e., 3% of wind velocity, with Cw = 0%. Therefore, considering the observations carried out during the field assessment, it is possible to suppose that the low-buoyancy items were able to travel long distances until they were transported landward by the wind action and entered the breaking zone, as was the case in the field assessment. In this zone, their fate was linked to the effects of the spilling breaking processes that especially affected the high-buoyancy items, which easily surfed landward, becoming stranded on the beach face. The low-buoyancy items slowly moved landward because they were less affected by the breaking processes surfing wave crests for short distances and the windage effects. Once they arrived at the shoreline, they entered the swash zone and became stranded, or, in most cases, they moved along the shore due to the swash–backwash processes. It is possible to suppose that, under more energetic conditions, they would rapidly become stranded.
The neutral-buoyancy items moved due to wind action on the water surface, and their velocities were on the order of magnitude of the theoretical predicted values, being slightly lower than the values recorded for the low-buoyancy items. Their movement was not affected by the Stokes drift currents, as was the case for the high-buoyancy items.
Such results are due to the specific local conditions recorded during the field assessment, which showed small wave amplitudes (approx. 0.2 m) and periods (approx. 3 s). This is, however, a result that may not be generalized, since the predominance of wind-induced currents or wave drifts depends on the intensity of the wind and wave amplitude and period in the area where the object is located. The neutral-buoyancy items were not affected by wave-breaking processes and therefore arrived at the shoreline because of landward-blowing wind. This result allows us to suppose that such items can travel long distances, that they are not affected by wave processes, and that they are stranded only under landward wind conditions. During the experiment, once the items arrived at the shoreline, they entered into the swash–backwash zone, moved along the shore, and frequently became stranded because of their irregular shape that affected their floatability.
The negative-buoyancy items presented certain deviations between the recorded and predicted velocity values due to friction effects that depend on different specific aspects that were not considered in the used formulations. Therefore, their displacement requires further investigation on the basis of new experimental data allowing for a quantitative analysis of the entire set of forces involved in the process, as well as the generation of new theoretical parameterizations that are representative of the observed behavior.
Among these processes, it is worth highlighting the windage due to the effects of direct wind on significantly protruding objects with a highly positive buoyancy, as well as the friction with the bottom for items with a negative buoyancy. Despite its limitations, the simple calculations carried out in this paper allow us to outline the origin and nature of the movements involved in the items’ dispersions and to adequately predict the order of magnitude of real-time recorded displacements.
In conclusion, this research provides a preliminary set of data and information for the assessment of marine litter displacement under specific energetic marine conditions. The performed experiments highlight the significant contribution that the windage effect has on objects with a positive buoyancy. This process is controlled by complex factors such as the size of the floating object, its area exposed to the wind, and the part of the object that is submerged. Its determination requires a significant set of experimental data, taking into account different objects and hydrometeorological conditions so that significant correlations can be obtained between the variables involved. Future applications will be aimed at providing a statistical-based definition of the item displacement capacity under different energetic conditions in order to facilitate the identification of the preferred direction and modality of movement for each item category and to support the identification of litter accumulation sites as consequence of extreme events (i.e., storm surges) and/or normal marine climate conditions.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/w16030409/s1. Video S1: Behavior of plastic empty bottle under breaking conditions, point no. 1. Video S2: Behavior of bottle cap in the swashbackwash zone at the foreshore, point 0.
Author Contributions
Conceptualization, G.A. and O.Á.; methodology, G.A. and O.Á.; software, G.S. (Giovanni Scardino) and O.Á.; formal analysis, O.Á. and G.S. (Giovanni Scardino); investigation, G.A., G.S. (Gaetano Sabato), G.D., A.S. and A.R.; resources, G.D., G.S. (Gaetano Sabato), and A.S.; data curation, G.D. and G.A.; writing—original draft preparation, G.A., O.Á. and A.R.; writing—review and editing, A.R. and G.A.; supervision, G.A.; project administration, A.R. All authors have read and agreed to the published version of the manuscript.
Funding
The field activities have been funded in the framework of the Research Agreement stipulated between the Department of Earth and Geo-Environmental Sciences of the University of Bari Aldo Moro and the Marine Protected Area of Torre Guaceto (Scientific Coordinator: G. Scicchitano).
Data Availability Statement
Data will be provided upon request to the corresponding author.
Acknowledgments
This work is a contribution to the PAI Research Group RNM-373 of Andalusia, Spain. This study has been developed within the activities of the project “Beach & Marine Litter Monitoring in Apulia” (Scientific responsible: Angela Rizzo), funded by the Apulia Region under the program RIPARTI (CUP: B83C22004070002) and promoted by the Department of Earth and Geo-Environmental Sciences of the University of Bari Aldo Moro in collaboration with Environmental Surveys S.r.l. (ENSU) and in the frame of the RETURN Extended Partnership supported under the National Recovery and Resilience Plan (NRRP), Mission 4, Component 2, Investment 1.3-D.D. 1243 2/8/2022—European Union NextGenerationEU (no. PE00000005, CUP: B53C22004020002). Finally, the authors would like to thank the staff of the Torre Guaceto Marine Protected Area and Centro Velico Torre Guaceto for the logistic support provided during the field activities.
Conflicts of Interest
The authors declare no conflicts of interest.
Appendix A

Figure A1.
Litter items used for the field assessment (Table 1).
Figure A1.
Litter items used for the field assessment (Table 1).
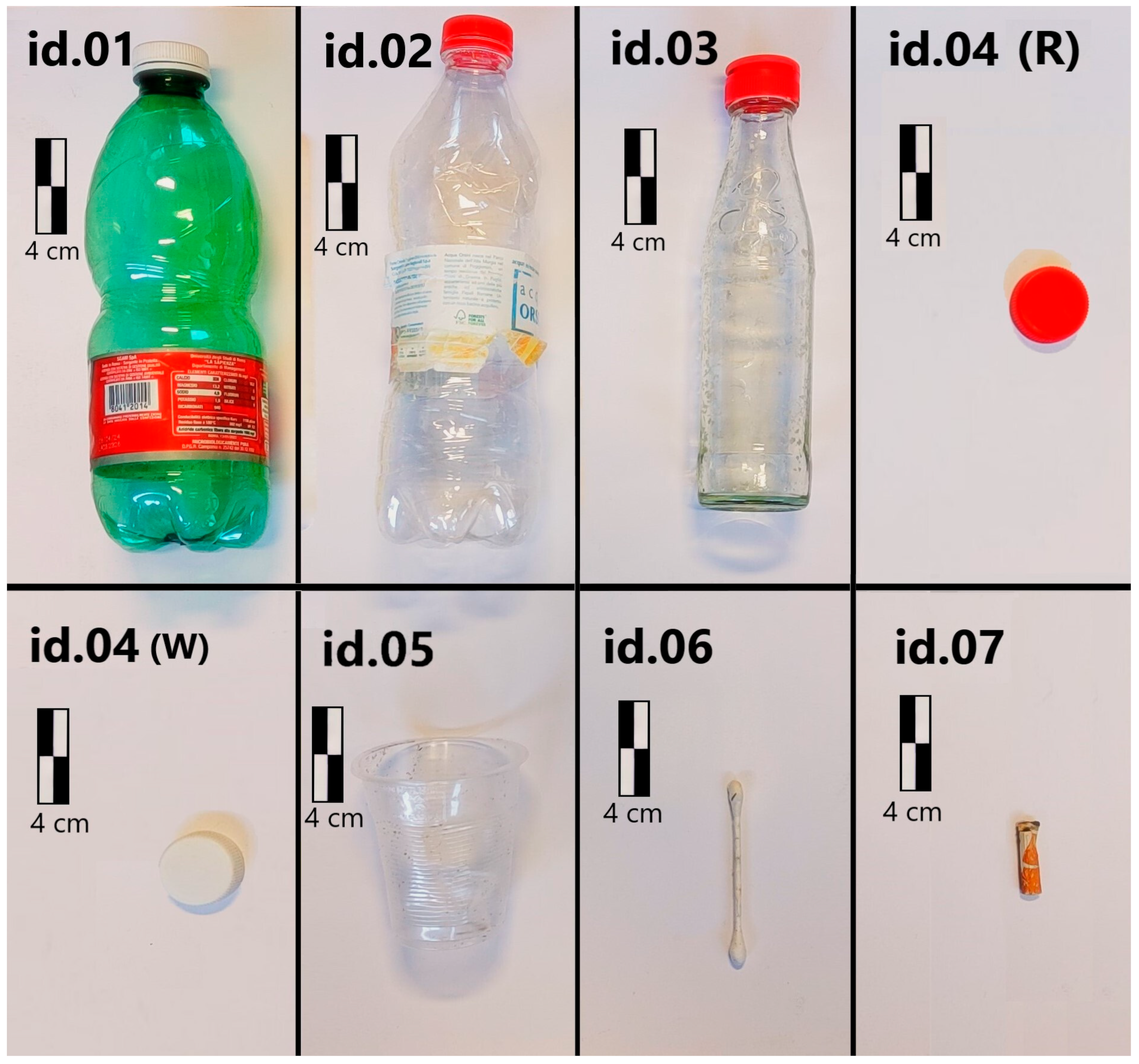
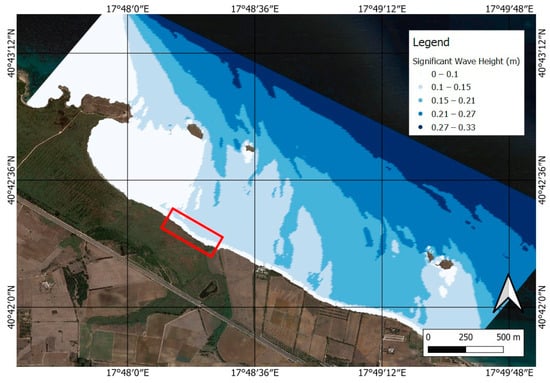
Figure A2.
Wave propagation performed using SWAN for the coastal area of Torre Guaceto. The target area is highlighted in the red inset.
Figure A2.
Wave propagation performed using SWAN for the coastal area of Torre Guaceto. The target area is highlighted in the red inset.
References
- United Nations Environment Programme Nairobi. United Nations Environment Programme Marine Litter: An Analytical Overview; United Nations Environment Programme: Nairobi, Kenya, 2005; p. 53. [Google Scholar]
- Cheshire, A.C.; Adler, E.; Barbière, J.; Cohen, Y.; Evans, S.; Jarayabhand, S.; Jeftic, L.; Jung, R.T.; Kinsey, S.; Kusui, E.T.; et al. NEP/IOC Guidelines on Survey and Monitoring of Marine Litter; United Nations Environment Programme: Nairobi, Kenya, 2023; Volume 186, p. 120. [Google Scholar]
- Schneider, F.; Parsons, S.; Clift, S.; Stolte, A.; McManus, M.C. Collected Marine Litter—A Growing Waste Challenge. Mar. Pollut. Bull. 2018, 128, 162–174. [Google Scholar] [CrossRef] [PubMed]
- Gregory, M.R. Environmental Implications of Plastic Debris in Marine Settings—Entanglement, Ingestion, Smothering, Hangers-on, Hitch-Hiking and Alien Invasions. Philos. Trans. R. Soc. B Biol. Sci. 2009, 364, 2013–2025. [Google Scholar] [CrossRef] [PubMed]
- Votier, S.C.; Archibald, K.; Morgan, G.; Morgan, L. The Use of Plastic Debris as Nesting Material by a Colonial Seabird and Associated Entanglement Mortality. Mar. Pollut. Bull. 2011, 62, 168–172. [Google Scholar] [CrossRef] [PubMed]
- Rech, S.; Borrell, Y.; García-Vazquez, E. Marine Litter as a Vector for Non-Native Species: What We Need to Know. Mar. Pollut. Bull. 2016, 113, 40–43. [Google Scholar] [CrossRef]
- Campbell, M.L.; Peters, L.; McMains, C.; de Campos, M.C.R.; Sargisson, R.J.; Blackwell, B.; Hewitt, C.L. Are Our Beaches Safe? Quantifying the Human Health Impact of Anthropogenic Beach Litter on People in New Zealand. Sci. Total Environ. 2019, 651, 2400–2409. [Google Scholar] [CrossRef]
- Tudor, D.T.; Williams, A.T. Public Perception and Opinion of Visible Beach Aesthetic Pollution: The Utilisation of Photography. J. Coast. Res. 2003, 19, 1104–1115. [Google Scholar]
- Krelling, A.P.; Williams, A.T.; Turra, A. Differences in Perception and Reaction of Tourist Groups to Beach Marine Debris That Can Influence a Loss of Tourism Revenue in Coastal Areas. Mar. Policy 2017, 85, 87–99. [Google Scholar] [CrossRef]
- Prevenios, M.; Zeri, C.; Tsangaris, C.; Liubartseva, S.; Fakiris, E.; Papatheodorou, G. Beach Litter Dynamics on Mediterranean Coasts: Distinguishing Sources and Pathways. Mar. Pollut. Bull. 2018, 129, 448–457. [Google Scholar] [CrossRef]
- Hanke, G.; Galgani, F.; Werner, S.; Oosterbaan, L.; Nilsson, P.; Fleet, D.; Kinsey, S.; Thompson, R.; Van Franeker, J.A.; Vlachogianni, T.; et al. Guidance on Monitoring of Marine Litter in European Seas; Publications Office of the European Union: Luxembourg, 2013; ISBN 978-92-79-32709-4. [Google Scholar]
- Ryan, P.G. Does Size and Buoyancy Affect the Long-Distance Transport of Floating Debris? Environ. Res. Lett. 2015, 10, 084019. [Google Scholar] [CrossRef]
- Lebreton, L.; Egger, M.; Slat, B. A Global Mass Budget for Positively Buoyant Macroplastic Debris in the Ocean. Sci. Rep. 2019, 9, 12922. [Google Scholar] [CrossRef]
- Maclean, K.; Weideman, E.A.; Perold, V.; Ryan, P.G. Buoyancy Affects Stranding Rate and Dispersal Distance of Floating Litter Entering the Sea from River Mouths. Mar. Pollut. Bull. 2021, 173, 113028. [Google Scholar] [CrossRef]
- Andrady, A.L.; Neal, M.A. Applications and Societal Benefits of Plastics. Philos. Trans. R. Soc. B Biol. Sci. 2009, 364, 1977–1984. [Google Scholar] [CrossRef]
- Andrady, A.L. Persistence of Plastic Litter in the Oceans. In Marine Anthropogenic Litter; Bergmann, M., Gutow, L., Klages, M., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 57–72. ISBN 978-3-319-16510-3. [Google Scholar]
- Duhec, A.V.; Jeanne, R.F.; Maximenko, N.; Hafner, J. Composition and Potential Origin of Marine Debris Stranded in the Western Indian Ocean on Remote Alphonse Island, Seychelles. Mar. Pollut. Bull. 2015, 96, 76–86. [Google Scholar] [CrossRef]
- Ruiz, I.; Rubio, A.; Abascal, A.J.; Basurko, O.C. Modelling Floating Riverine Litter in the South-Eastern Bay of Biscay: A Regional Distribution from a Seasonal Perspective. Ocean Sci. 2022, 18, 1703–1724. [Google Scholar] [CrossRef]
- Fazey, F.M.C.; Ryan, P.G. Biofouling on Buoyant Marine Plastics: An Experimental Study into the Effect of Size on Surface Longevity. Environ. Pollut. 2016, 210, 354–360. [Google Scholar] [CrossRef]
- Ye, S.; Andrady, A.L. Fouling of Floating Plastic Debris under Biscayne Bay Exposure Conditions. Mar. Pollut. Bull. 1991, 22, 608–613. [Google Scholar] [CrossRef]
- Andrady, A.L. Microplastics in the Marine Environment. Mar. Pollut. Bull. 2011, 62, 1596–1605. [Google Scholar] [CrossRef]
- Rizzo, A.; Rangel-Buitrago, N.; Impedovo, A.; Mastronuzzi, G.; Scardino, G.; Scicchitano, G. A Rapid Assessment of Litter Magnitudes and Impacts along the Torre Guaceto Marine Protected Area (Brindisi, Italy). Mar. Pollut. Bull. 2021, 173, 112987. [Google Scholar] [CrossRef]
- Rizzo, A.; Sozio, A.; Anfuso, G.; La Salandra, M. The Use of UAV Images to Assess Preliminary Relationships between Spatial Litter Distribution and Beach Morphodynamic Trends: The Case Study of Torre Guaceto Beach (Apulia Region, Southern Italy). Geogr. Fis. Din. Quat. 2022, 45, 237–250. [Google Scholar]
- Scarrica, V.; Aucelli, P.; Cagnazzo, C.; Casolaro, A.; Fiore, P.; La Salandra, M.; Rizzo, A.; Scardino, G.; Scicchitano, G.; Staiano, A. A Novel Beach Litter Analysis System Based on UAV Images and Convolutional Neural Networks. Ecol. Inform. 2022, 72, 101875. [Google Scholar] [CrossRef]
- De Giosa, F.; Scardino, G.; Vacchi, M.; Piscitelli, A.; Milella, M.; Ciccolella, A.; Mastronuzzi, G. Geomorphological Signature of Late Pleistocene Sea Level Oscillations in Torre Guaceto Marine Protected Area (Adriatic Sea, SE Italy). Water 2019, 11, 2409. [Google Scholar] [CrossRef]
- Lapietra, I.; Lisco, S.; Mastronuzzi, G.; Milli, S.; Pierri, C.; Sabatier, F.; Scardino, G.; Moretti, M. Morpho-Sedimentary Dynamics of Torre Guaceto Beach (Southern Adriatic Sea, Italy). J. Earth Syst. Sci. 2022, 131, 64. [Google Scholar] [CrossRef]
- Mastronuzzi, G.; Caputo, R.; Di Bucci, D.; Fracassi, U.; Iurilli, V.; Milella, M.; Pignatelli, C.; Sansò, P.; Selleri, G. Middle-Late Pleistocene Evolution of the Adriatic Coastline of Southern Apulia (Italy) in Response to Relative Sea-Level Changes. Geogr. Fis. Din. Quat. 2011, 34, 207–221. [Google Scholar] [CrossRef]
- Mastronuzzi, G.; Milella, M.; Piscitelli, A.; Simone, O.; Quarta, G.; Scarano, T.; Calcagnile, L.; Spada, I. Landscape Analysis in Torre Guaceto Area (Brindisi) Aimed at the Reconstruction of the Late Holocene Sea Level Curve. Geogr. Fis. Din. Quat. 2018, 41, 65–79. [Google Scholar] [CrossRef]
- Rech, S.; Macaya-Caquilpán, V.; Pantoja, J.F.; Rivadeneira, M.M.; Madariaga, D.J.; Thiel, M. Rivers as a Source of Marine Litter—A Study from the SE Pacific. Mar. Pollut. Bull. 2014, 82, 66–75. [Google Scholar] [CrossRef] [PubMed]
- Asensio-Montesinos, F.; Anfuso, G.; Randerson, P.; Williams, A.T. Seasonal Comparison of Beach Litter on Mediterranean Coastal Sites (Alicante, SE Spain). Ocean Coast. Manag. 2019, 181, 104914. [Google Scholar] [CrossRef]
- Asensio-Montesinos, F.; Anfuso, G.; Ramírez, M.O.; Smolka, R.; Sanabria, J.G.; Enríquez, A.F.; Arenas, P.; Macias Bedoya, A. Beach Litter Composition and Distribution on the Atlantic Coast of Cádiz (SW Spain). Reg. Stud. Mar. Sci. 2020, 34, 101050. [Google Scholar] [CrossRef]
- Lyddon, C.E.; Brown, J.M.; Leonardi, N.; Saulter, A.; Plater, A.J. Quantification of the Uncertainty in Coastal Storm Hazard Predictions Due to Wave-Current Interaction and Wind Forcing. Geophys. Res. Lett. 2019, 46, 14576–14585. [Google Scholar] [CrossRef]
- Whitham, G.B. Linear and Nonlinear Waves; Wiley: New York, NY, USA, 1974. [Google Scholar]
- Hasselmann, K.; Barnett, T.P.; Bouws, E.; Carlson, H.; Cartwright, D.E.; Enke, K.; Ewing, J.A.; Gienapp, H.; Hasselmann, D.E.; Kruseman, P.; et al. Measurements of Wind-Wave Growth and Swell Decay during the Joint North Sea Wave Project (JONSWAP); Suppl. A; Deutches Hydrographisches Institut: Hamburg, Germany, 1973; pp. 8–12. Available online: http://resolver.tudelft.nl/uuid:f204e188-13b9-49d8-a6dc-4fb7c20562fc (accessed on 1 January 2024).
- Davies, A.M.; Flather, R.A. Computing Extreme Meteorologically Induced Currents, with Application to the Northwest European Continental Shelf. Cont. Shelf Res. 1987, 7, 643–683. [Google Scholar] [CrossRef]
- Kagan, B.A.; Álvarez, O.; Izquierdo, A.; Mañanes, R.; Tejedor, B.; Tejedor, L. Weak Wind-Wave/Tide Interaction over a Moveable Bottom: Results of Numerical Experiments in Cádiz Bay. Cont. Shelf Res. 2003, 23, 435–456. [Google Scholar] [CrossRef]
- Pugh, D.T. Tides, Surges and Mean Sea Level; Wiley: Chichester, UK, 1987; ISBN 978-0-471-91505-8. [Google Scholar]
- Longuet-Higgins, M.S. Longshore Currents Generated by Obliquely Incident Sea Waves: 1. J. Geophys. Res. 1970, 75, 6778–6789. [Google Scholar] [CrossRef]
- Isobe, A.; Kubo, K.; Tamura, Y.; Kako, S.; Nakashima, E.; Fujii, N. Selective Transport of Microplastics and Mesoplastics by Drifting in Coastal Waters. Mar. Pollut. Bull. 2014, 89, 324–330. [Google Scholar] [CrossRef] [PubMed]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).