
Angle of Attack Characteristics of Full-Active and Semi-Active Flapping Foil Propulsors



Abstract
1. Introduction
2. Description and Definition of Flapping Foil Propulsion
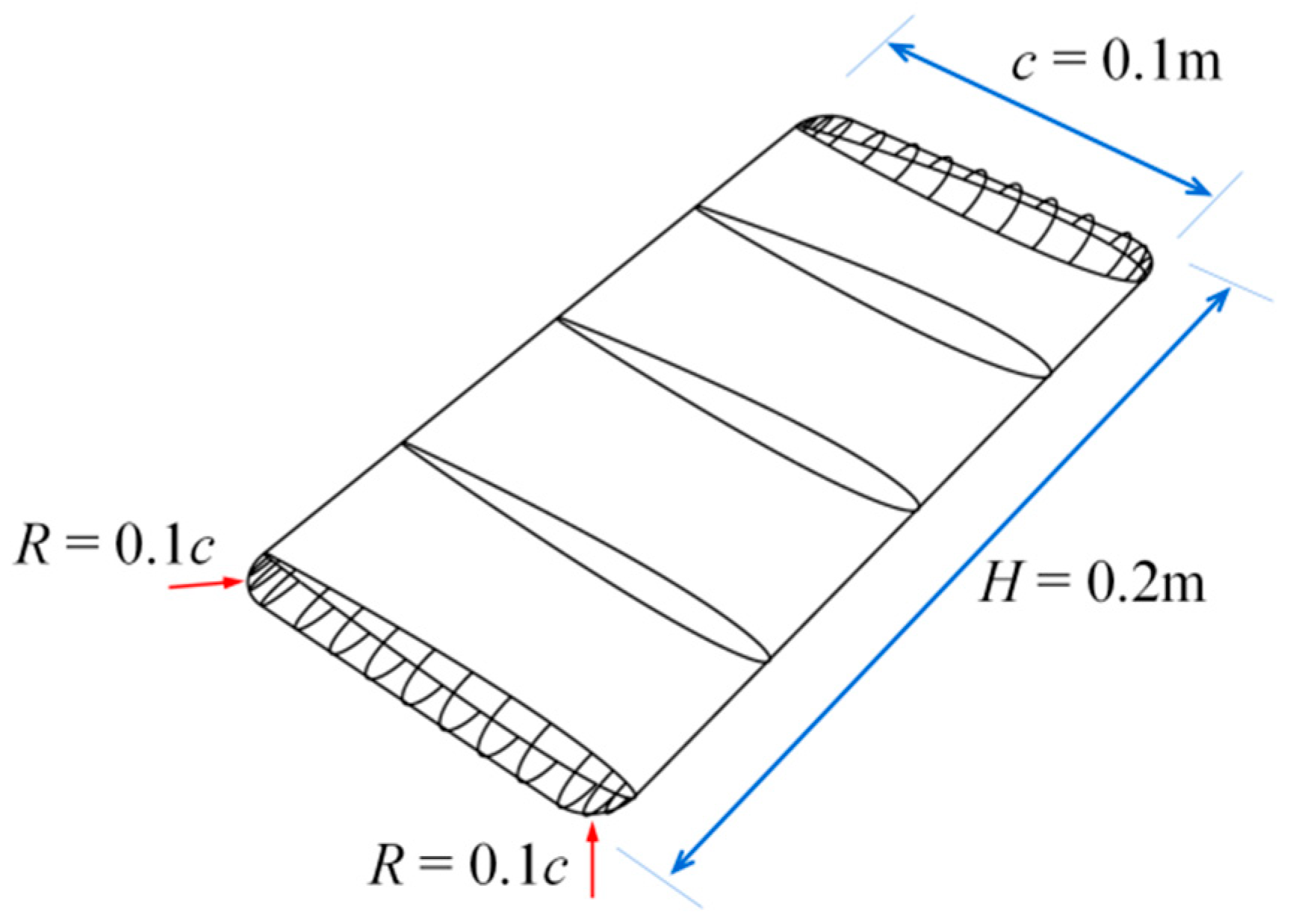
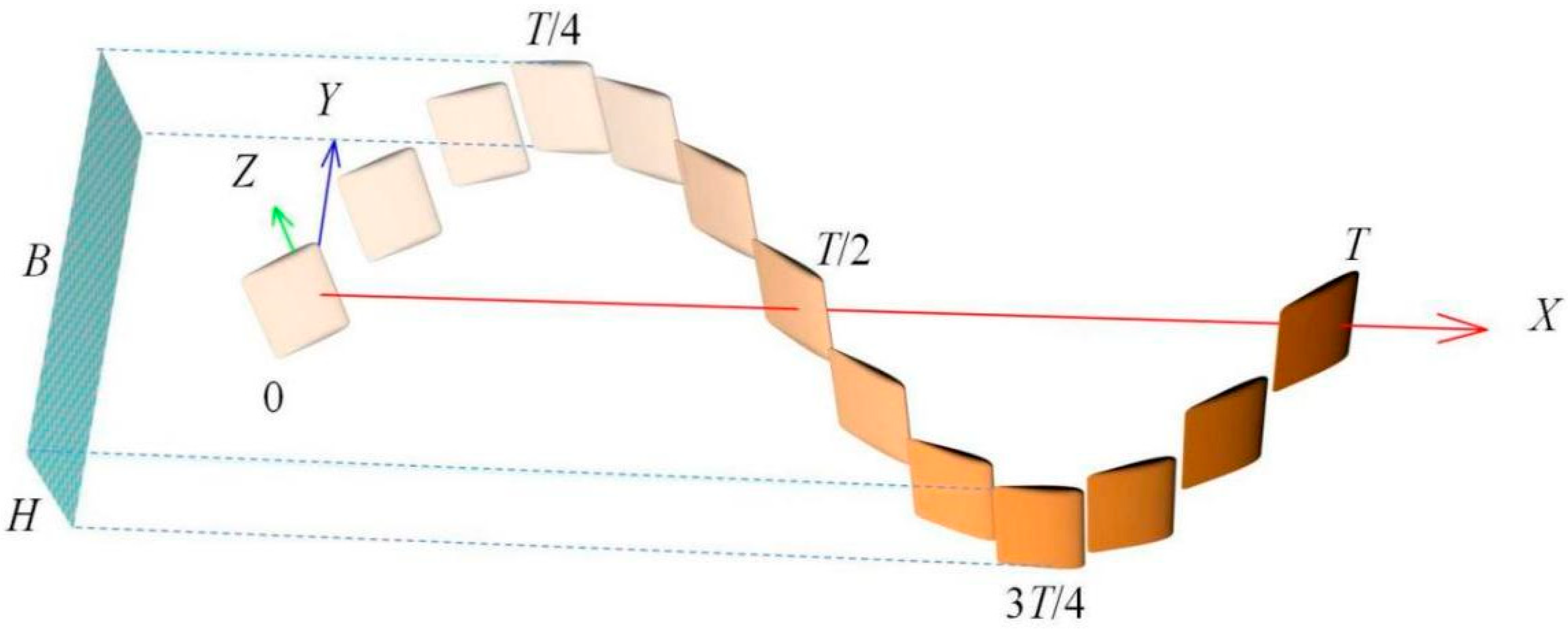
2.1. Geometric Structure and Motion Definition
2.2. Nondimensional Propulsive Indicators
3. Computational Method and Validation
3.1. Governing Equations
3.2. Mesh and Method
3.3. Validation
3.3.1. Simulation Verification of 2D Experimental Results
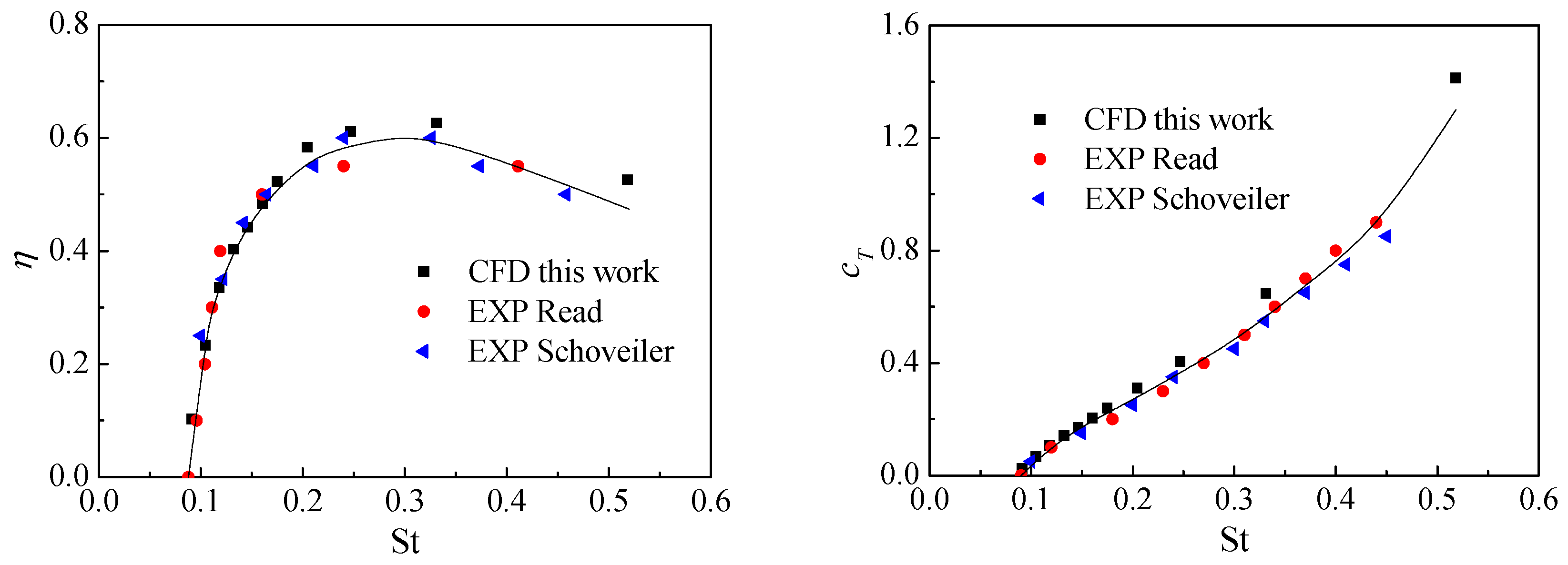
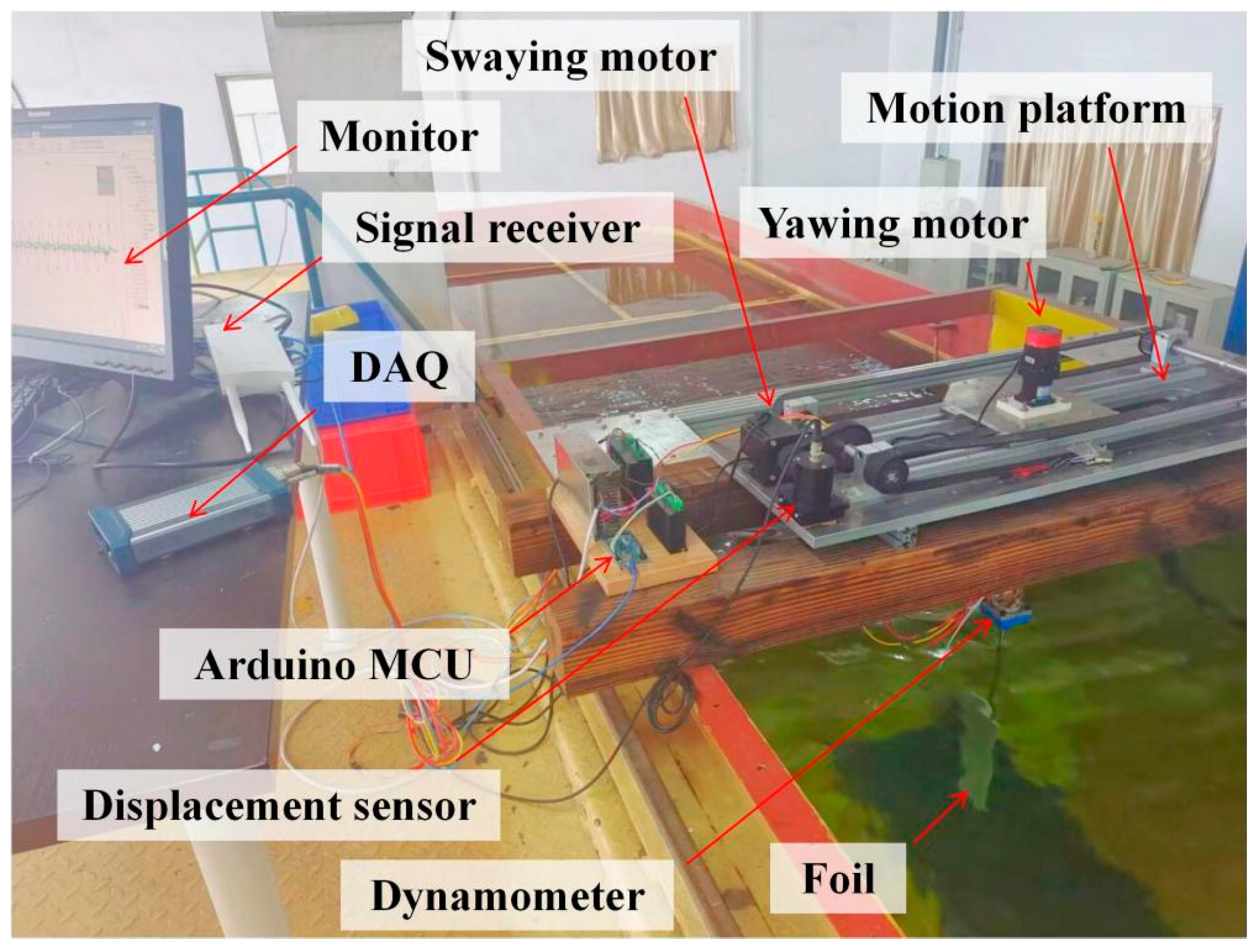
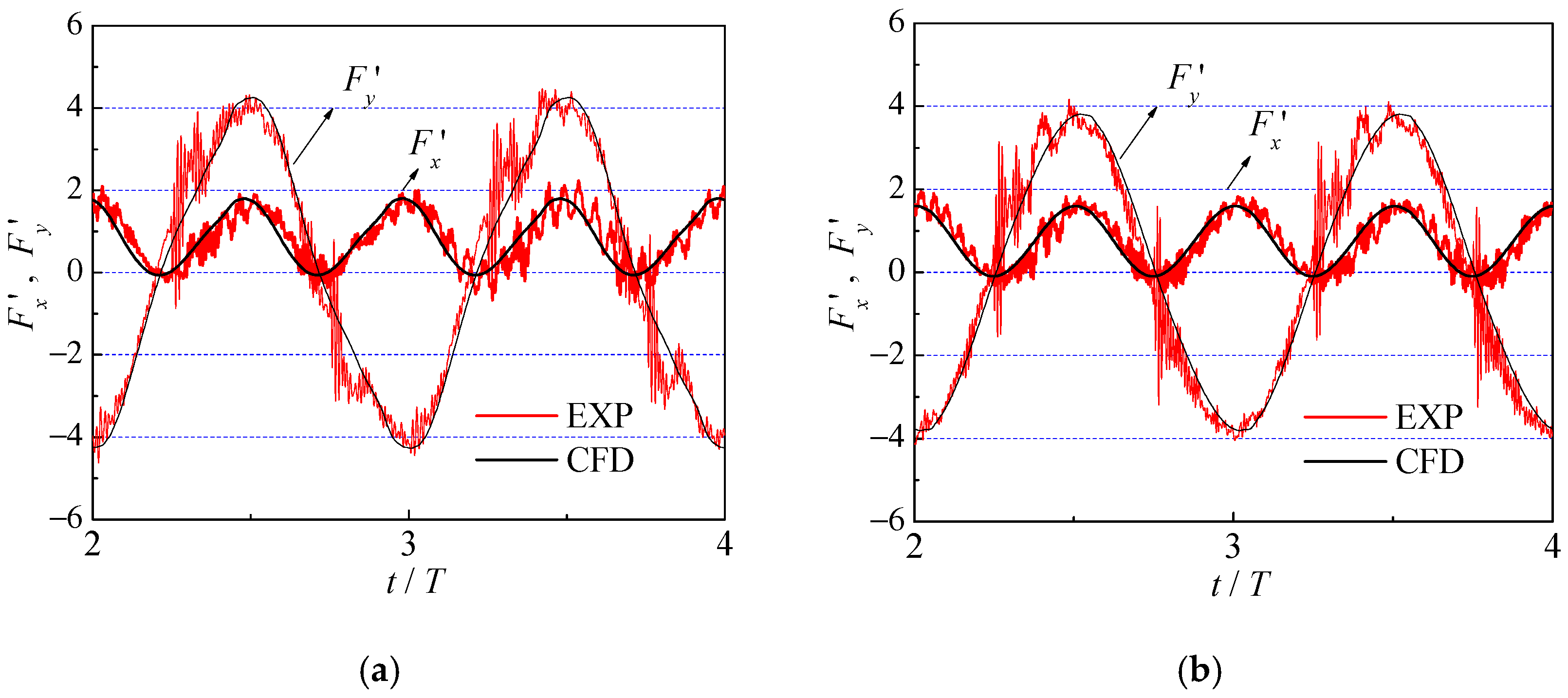
3.3.2. Experimental Verification of 3D Simulation Methods
4. Results and Analysis
4.1. Maximum AoA Analysis
4.1.1. Full-Active Flapping Foils

4.1.2. Semi-Active Flapping Foils

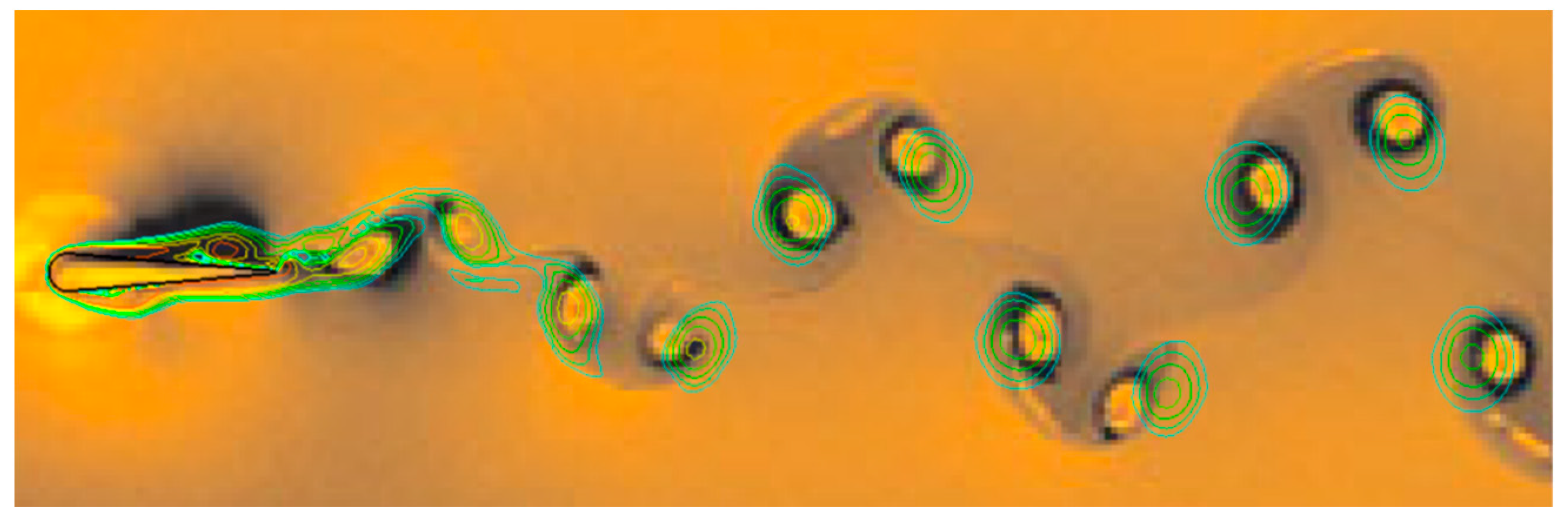
4.2. Analysis of the Vortex Structure
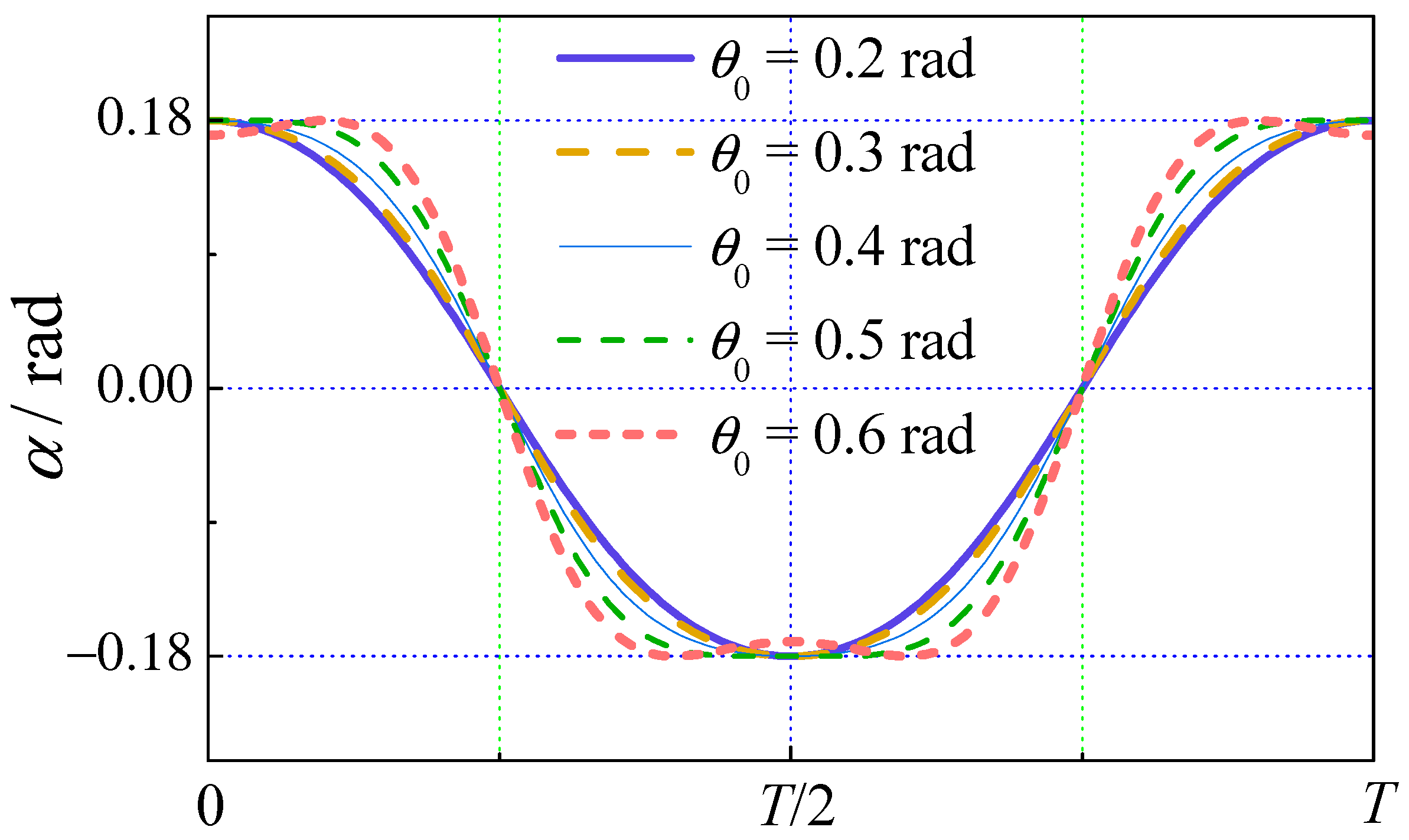
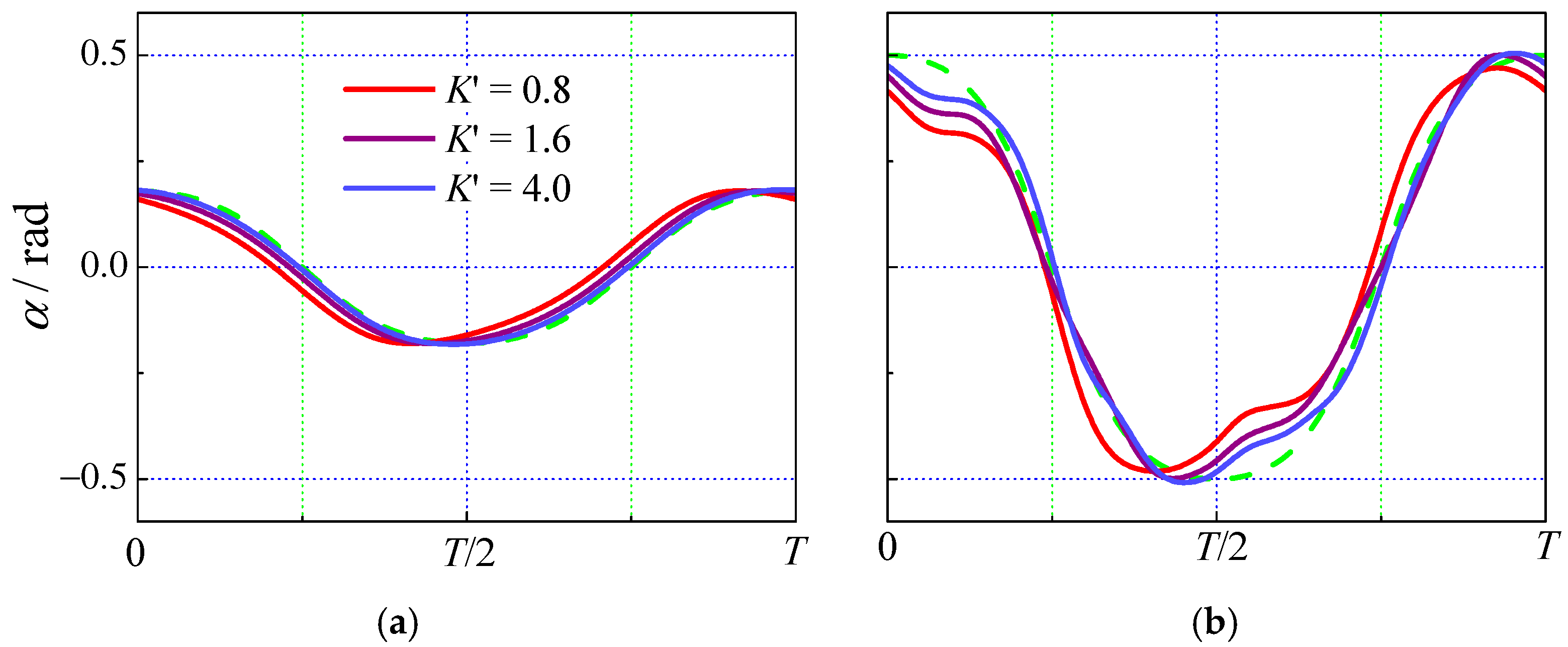
4.3. AoA Trajectory
5. Conclusions
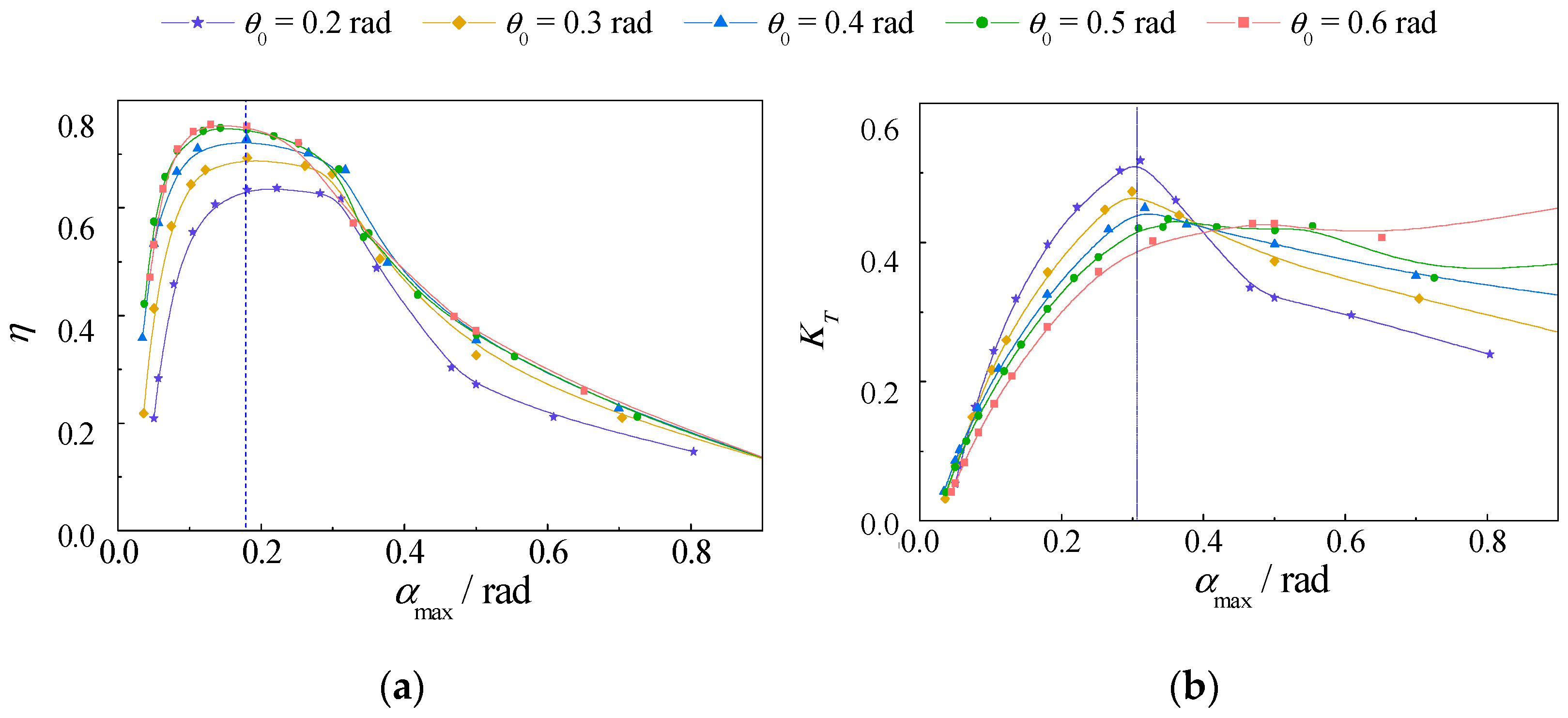
- The and KT curves of full-active and semi-active flapping foils were analyzed separately. The results show that for the small aspect ratio NACA 0012 flapping foils in this paper, regardless of the active or semi-active form, the peak efficiency generally appears around αmax = 0.2 rad, and can have high efficiency (75%) within a certain range. While the peak thrust coefficient (0.5) is concentrated around αmax = 0.3 rad, and after exceeding this point, the thrust coefficient slowly decreases;
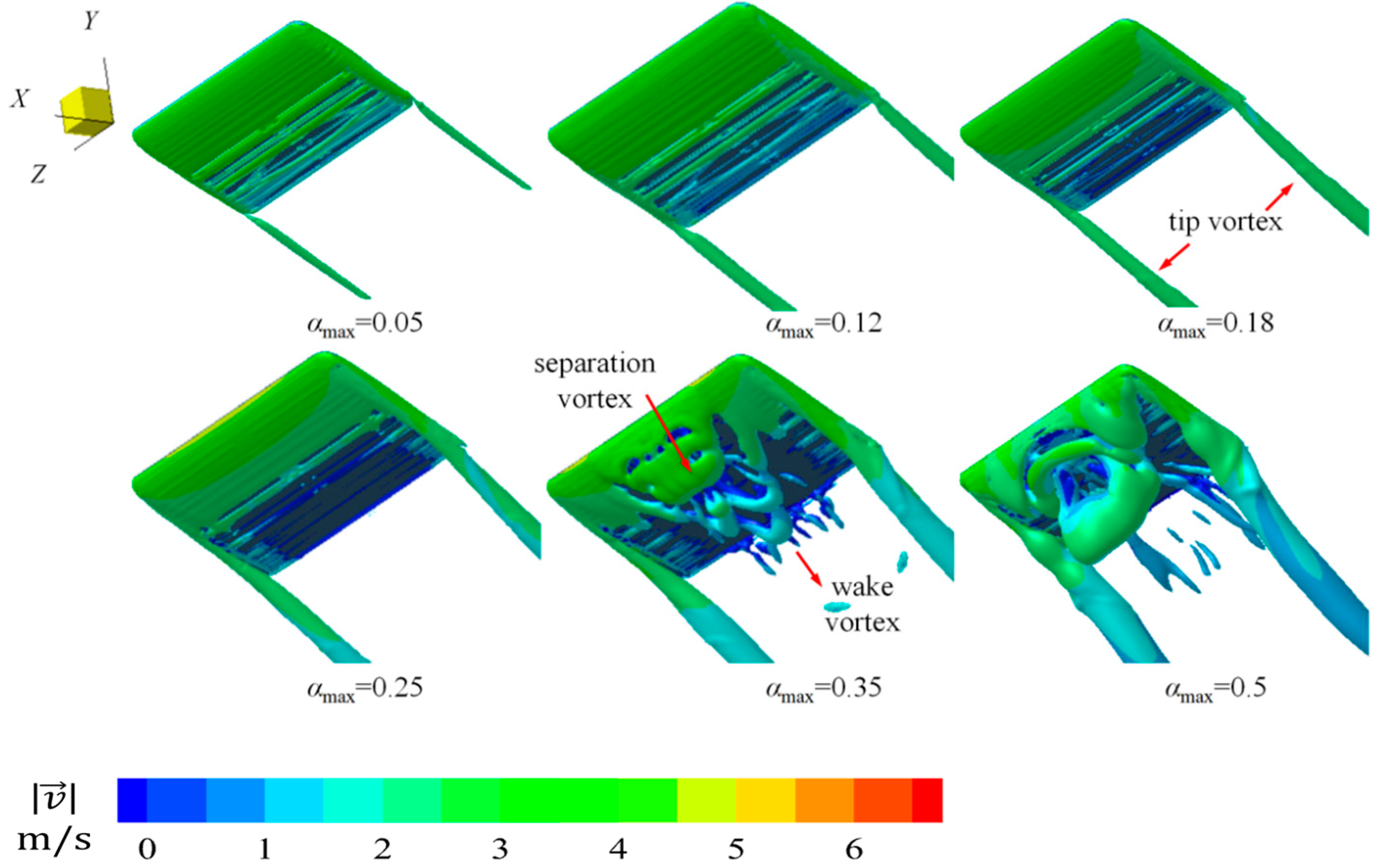
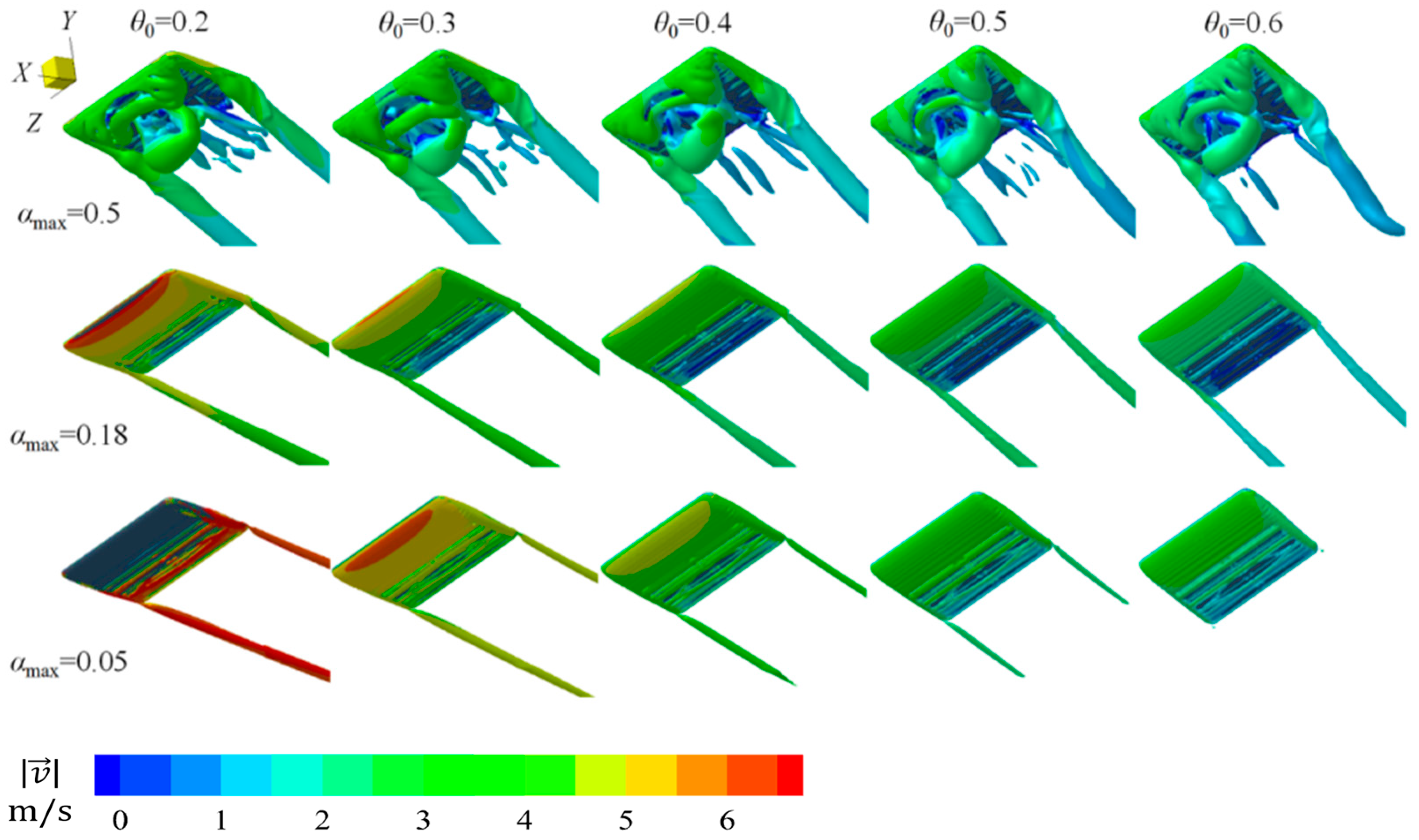
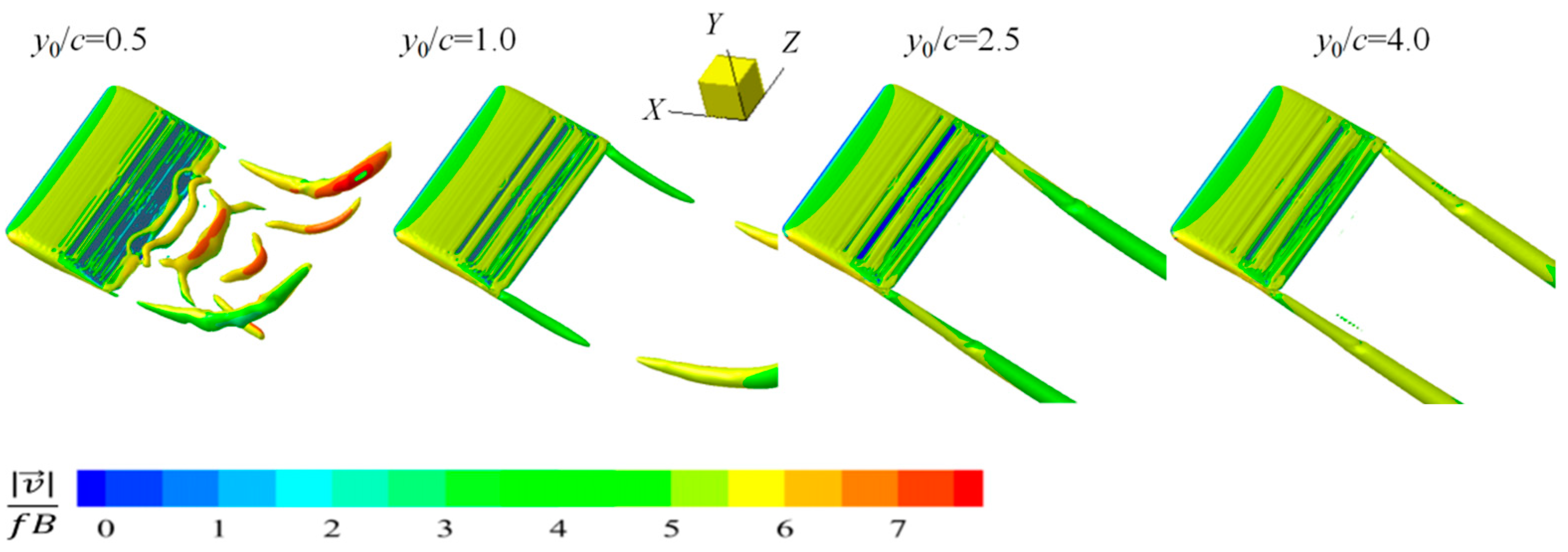
- To analyze the rapid reduction in efficiency after deviation from the peak efficiency point, the flow field vortex structure of the full-active and semi-active flapping foils is observed. Three typical operating point positions () were compared under various conditions. It is evident that when the is small the flow-field vortex structure of the flapping foil is relatively simple, only tip vortices at both ends; while when the is larger, the flow-field vortex structure becomes complicated. Moreover, the dissipation of these complex vortex systems is one of the reasons for the lower efficiency at this operating point. In addition, at small heave amplitudes, even at peak efficient operating points (), there still are obvious separation vortices, which is probably the reason for the lower efficiency of flapping foils with small heave amplitudes;
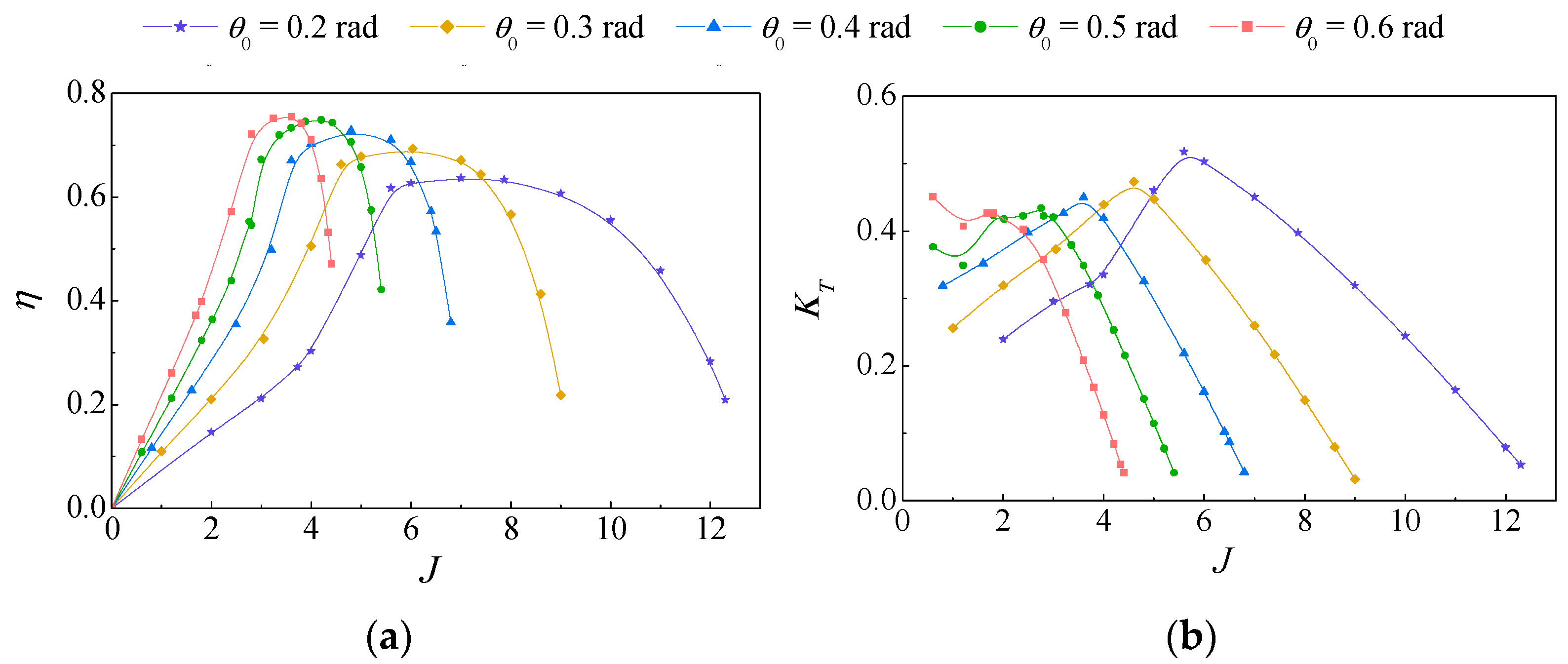
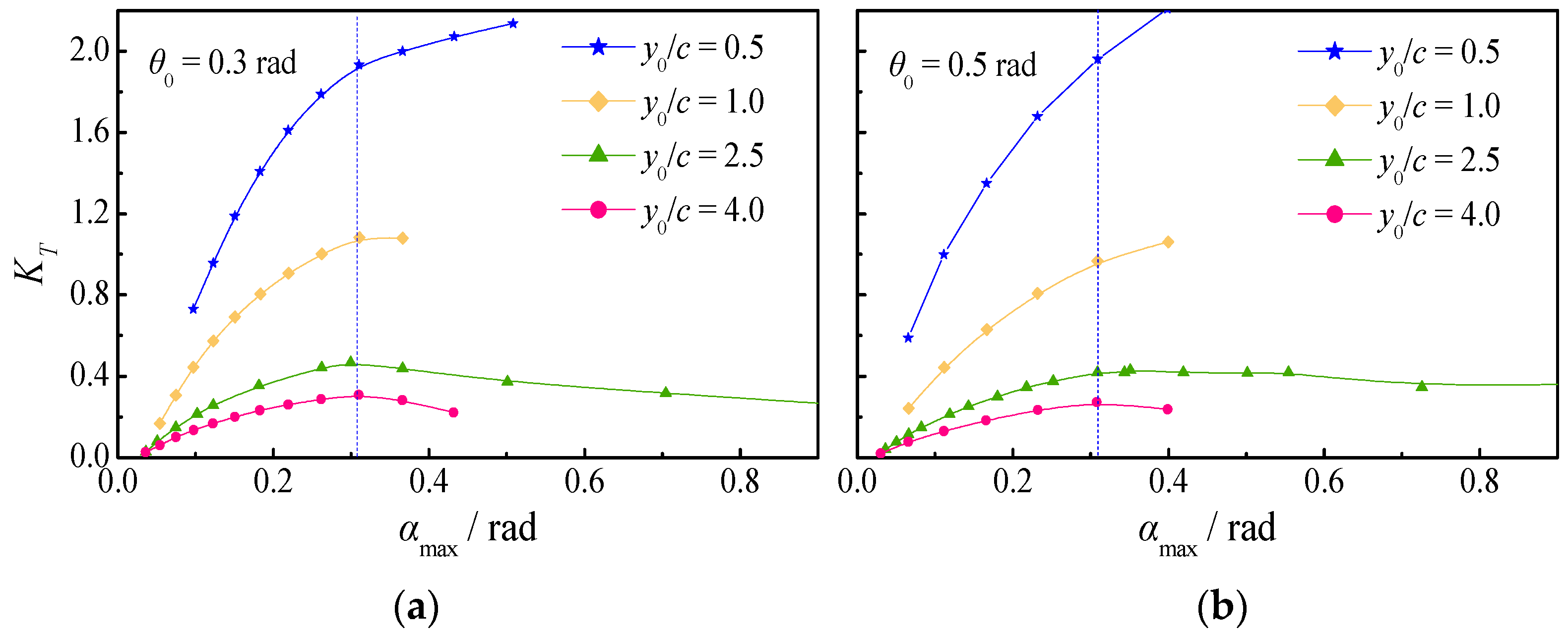
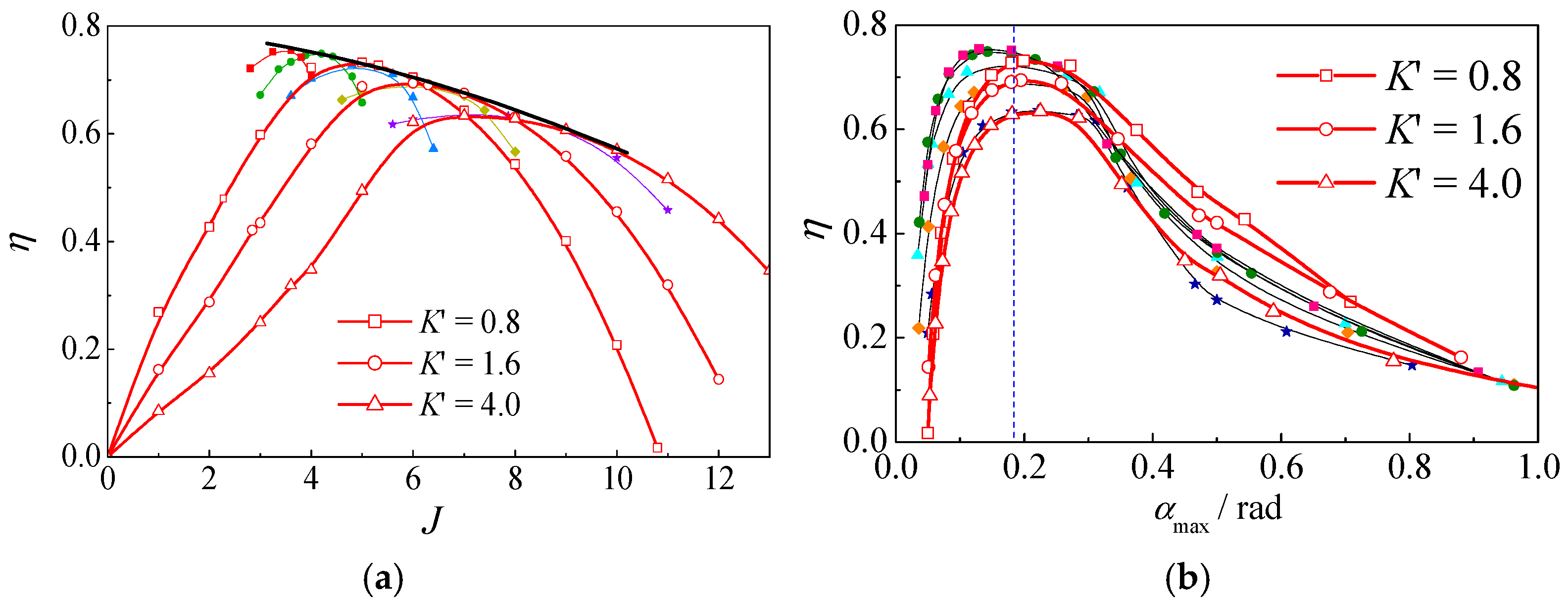
- In the analysis of the and KT curves of the flapping foil, it was also found that although the peak efficiency usually appears around , there are still significant differences in the peak efficiency at different pitch amplitudes, heave amplitudes, and spring stiffnesses. Flapping foils with larger pitch and heave amplitudes, as well as smaller spring stiffness, will have higher peak efficiency. It can be roughly inferred that, except for the difference in peak efficiency caused by complex vortex systems at different heave amplitudes, the difference in peak efficiency between the other two is caused by different values of the advance coefficient J.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Particulars | Abbreviation | Unit |
| angle of attack(AoA) | α | radian |
| maximum AoA | αmax | radian |
| chord length of flapping foil | c | m |
| span-wise of flapping foil | H | m |
| radius of the round corners at both ends of the span direction of the flapping foil | R | m |
| the distance between the pitching center and leading-edge of the flapping foil | c0 | m |
| advancing velocity | VA | m/s |
| period | T | s |
| heave height | B | m |
| pitching angle | θ | radian |
| pitching amplitude | θ0 | radian |
| heaving amplitude | y0 | m |
| phase angle difference between the heaving and pitching motions | φ | radian |
| flapping frequency | f | Hz |
| natural frequency of the semi-active flapping foils in air | fN | Hz |
| inertia moment of the semi-active flapping foil | I | kg·m2 |
| torsion spring stiffness of the semi-active flapping foil | K | N·m/rad |
| spring stiffness ratio of the semi-active flapping foil | K′ | |
| heave amplitude ratio | y0/c | |
| advance coefficient | J | |
| thrust coefficient | KT | |
| thrust coefficient given by Read and Schouveiler | cT | |
| propulsive efficiency | η | |
| angular velocity of the flapping foil pivot center | ωz | rad/s |
| the torque on the pitching center of flapping foil | Mz | N·m |
| kinematic viscosity of fresh water | ν | m2/s |
| the velocity component of the pivot center in the Y direction | Vy | m/s |
| thrust in the forward direction | Fx | N |
| the input heaving forces of flapping foil | Fy | N |
| frequency ratio of semi-active flapping foil | r |
References
- Anderson, J.M.; Streitlien, K.; Barrett, D.S.; Triantafyllou, M.S. Oscillating foils of high propulsive efficiency. J. Fluid Mech. 1998, 360, 41–72. [Google Scholar] [CrossRef]
- Read, D.A.; Hover, F.S.; Triantafyllou, M.S. Forces on oscillating foils for propulsion and maneuvering. J. Fluids Struct. 2003, 17, 163–183. [Google Scholar] [CrossRef]
- Floryan, D.; Buren, T.V.; Rowley, C.W.; Smits, A.J. Scaling the propulsive performance of heaving and pitching foils. J. Fluid Mech. 2017, 822, 386–397. [Google Scholar] [CrossRef]
- Mei, L.; Zhou, J.; Yu, D.; Shi, W.; Pan, X.; Li, M. Parametric Analysis for Underwater Flapping Foil Propulsor. Water 2021, 13, 2103. [Google Scholar] [CrossRef]
- Zhang, J.; Lliu, N.; LU, X. Locomotion of a passively flapping flat plate. J. Fluid Mech. 2010, 659, 43–68. [Google Scholar] [CrossRef]
- Bøckmann, E.; Steen, S. Experiments with actively pitch-controlled and spring-loaded oscillating foils. Appl. Ocean. Res. 2014, 48, 227–235. [Google Scholar] [CrossRef]
- Xiao, Q.; Hu, J.; Liu, H. Effect of torsional stiffness and inertia on the dynamics of low aspect ratio flapping wings. Bioinspiration Biomim. 2014, 9, 016008. [Google Scholar] [CrossRef]
- Thaweewat, N.; Phoemsapthawee, S.; Juntasaro, V. Semi-active flapping foil for marine propulsion. Ocean Eng. 2018, 147, 556–564. [Google Scholar] [CrossRef]
- Dewey, P.A.; Boschitsch, B.; Moored, K.; Stone, H.; Smits, A. Scaling laws for the thrust production of flexible pitching panels. J. Fluid Mech. 2013, 732, 29–46. [Google Scholar] [CrossRef]
- Cleaver, D.J.; Calderon, D.E.; Wang, Z.; Gursul, I. Lift enhancement through flexibility of plunging wings at low Reynolds numbers. J. Fluids Struct. 2016, 64, 27–45. [Google Scholar] [CrossRef]
- Lee, N.; Lee, S.; Cho, H.; Shin, S.J. Effect of flexibility on flapping wing characteristics in hover and forward flight. Comput. Fluids 2018, 173, 111–117. [Google Scholar] [CrossRef]
- Xu, G.D.; Duan, W.Y.; Xu, W.H. The propulsion of two flapping foils with tandem configuration and vortex interactions. Phys. Fluids 2017, 29, 097102. [Google Scholar] [CrossRef]
- Yang, F.; Shi, W.; Wang, D. Systematic study on propulsive performance of tandem hydrofoils for a wave glider. Ocean Eng. 2019, 179, 361–370. [Google Scholar] [CrossRef]
- Moreira, D.; Mathias, N.; Morais, T. Dual flapping foil system for propulsion and harnessing wave energy: A 2D parametric study for unaligned foil configurations. Ocean Eng. 2020, 215, 107875. [Google Scholar] [CrossRef]
- Joshi, V.; Hegde, A.S.; Gurugubelli, P.S. Effect of Strouhal number on propulsion of tandem flapping foils. Ocean Eng. 2024, 299, 117422. [Google Scholar] [CrossRef]
- Mannam, N.P.B.; Krishnankutty, P.; Vijayakumaran, H.; Sunny, R.C. Experimental and Numerical Study of Penguin Mode Flapping Foil Propulsion System for Ships. J. Bionic Eng. 2017, 14, 770–780. [Google Scholar] [CrossRef]
- Abbaspour, M.; Najafi, S. Developing three dimensional potential solver for investigation of propulsion performance of rigid and flexible oscillating foils. Ocean Eng. 2018, 147, 121–131. [Google Scholar] [CrossRef]
- Zhang, S.H.; Yan, W.H.; Zhou, J.W.; Mei, L.; Yu, D. Influence of tip shapes on hydrodynamic performance of low-aspect-ratio oscillating foils. J. Ship Mech. 2022, 26, 628–644. (In Chinese) [Google Scholar]
- Joe, H.; Roh, H.; Cho, H.; Yu, S.C. Development of a flap-type mooring-less wave energy harvesting system for sensor buoy. Energy 2017, 133, 851–863. [Google Scholar] [CrossRef]
- Schouveiler, L.; Hover, F.S.; Triantafyllou, M.S. Performance of flapping foil propulsion. J. Fluids Struct. 2005, 20, 949–959. [Google Scholar] [CrossRef]
- Hover, F.S.; Haugsdal, Ø.; Triantafyllou, M.S. Effect of angle of attack profiles in flapping foil propulsion. J. Fluids Struct. 2004, 19, 37–47. [Google Scholar] [CrossRef]
- Esfahani, J.A.; Barati, E.; Karbasian, H.R. Fluid structures of flapping airfoil with elliptical motion trajectory. Comput. Fluids 2015, 108, 142–155. [Google Scholar] [CrossRef]
- Xiao, Q.; Liao, W. Numerical Investigation of Angle of Attack Profile on Propulsion Performance of Oscillating Foil. Comput. Fluids 2010, 39, 1366–1380. [Google Scholar] [CrossRef]
- Karbasian, H.R.; Esfahani, J.A. Enhancement of propulsive performance of flapping foil by fish-like motion pattern. Comput. Fluids 2017, 156, 305–316. [Google Scholar] [CrossRef]
- Floc’H, F.; Phoemsapthawee, S.; Laurens, J.M.; Leroux, J.B. Porpoising foil as a propulsion system. Ocean Eng. 2012, 39, 53–61. [Google Scholar] [CrossRef]
- Sanmiguel-Rojas, E.; Fernandez-Feria, R. Propulsion enhancement of flexible plunging foils: Comparing linear theory predictions with high-fidelity CFD results. Ocean Eng. 2021, 235, 109331. [Google Scholar] [CrossRef]
- Buchholz, J.H.J.; Smits, A.J. On the evolution of the wake structure produced by a low-aspect-ratio pitching panel. J. Fluid Mech. 2006, 564, 433–443. [Google Scholar] [CrossRef]
- Dong, H.; Mittal, R.; Najjar, F.M. Wake topology and hydrodynamic performance of low-aspect-ratio flapping foils. J. Fluid Mech. 2006, 566, 309–343. [Google Scholar] [CrossRef]
- Schnipper, T.; Andersen, A.; Bohr, T. Vortex wakes of a flapping foil. J. Fluid Mech. 2009, 633, 411. [Google Scholar] [CrossRef]
- Andersen, A.; Bohr, T.; Schnipper, T. Wake structure and thrust generation of a flapping foil in two-dimensional flow. J. Fluid Mech. 2017, 812, R4. [Google Scholar] [CrossRef]
- Zurman-Nasution, A.N.; Ganapathisubramani, B.; Weymouth, G.D. Influence of three dimensionality on propulsive flapping. High Power Laser Sci. Eng. 2020, 886, A25. [Google Scholar] [CrossRef]
- Zheng, X.; Pröbsting, S.; Wang, H.; Li, Y. Characteristics of vortex shedding from a sinusoidally pitching hydrofoil at high Reynolds number. Phys. Rev. Fluids 2021, 6, 084702. [Google Scholar] [CrossRef]
- Wang, H.; Zheng, X.; Pröbsting, S.; Hu, C.; Wang, Q.; Li, Y. An unsteady RANS simulation of the performance of an oscillating hydrofoil at a high Reynolds number. Ocean Eng. 2023, 274, 114097. [Google Scholar] [CrossRef]
- Clark, R.P.; Smits, A.J. Thrust Production and Wake Structure of a Batoid-Inspired Oscillating Fin. Am. Phys. Soc. 2005, 562, 415–429. [Google Scholar] [CrossRef]
- Shao, J.Y.; Li, T.Q. Fish-like swimming in oblique flows: A numerical investigation. Ocean Eng. 2021, 230, 109005. [Google Scholar] [CrossRef]
- Mei, L.; Yan, W.; Zhou, J.; Guo, B.; Cong, L.; Shi, W. Propulsion characteristics of self-pitching flapping foil. Ocean Eng. 2023, 285, 115233. [Google Scholar] [CrossRef]
- Menter, F.R.; Rumsey, C.L. Assessment of two-equation turbulence models for transonoc flows. In Proceedings of the AIAA 25th Fluid Dynamics Conference, San Antonio, TX, USA, 22–25 June 1994; Volume 94, pp. 2343–2361. [Google Scholar]
- Da Silva, C.; Pereira, J. Invariants of the velocity-gradient, rate-of-strain, and rate-of-rotation tensors across the turbulent/nonturbulent interface in jets. Phys. Fluids 2008, 20, 765. [Google Scholar] [CrossRef]
- Zhu, Q. Optimal frequency for flow energy harvesting of a flapping foil. J. Fluid Mech. 2011, 675, 495–517. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Direction | Hydrofoil Surface Region | Region I | Region II |
|---|---|---|---|
| spanwise/Z | |||
| chordwise/X | |||
| normal direction/Y |
| J | |||||
|---|---|---|---|---|---|
| = 0.05 | 3.73 | 3.05 | 2.49 | 2.02 | 1.6 |
| = 0.18 | 7.87 | 6.03 | 4.8 | 3.87 | 3.2 |
| = 0.5 | 12.3 | 8.6 | 6.51 | 5.21 | 4.34 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mei, L.; Yan, W.; Zhou, J.; Tang, Y.; Shi, W. Angle of Attack Characteristics of Full-Active and Semi-Active Flapping Foil Propulsors. Water 2024, 16, 2957. https://doi.org/10.3390/w16202957
Mei L, Yan W, Zhou J, Tang Y, Shi W. Angle of Attack Characteristics of Full-Active and Semi-Active Flapping Foil Propulsors. Water. 2024; 16(20):2957. https://doi.org/10.3390/w16202957
Chicago/Turabian StyleMei, Lei, Wenhui Yan, Junwei Zhou, Yongqi Tang, and Weichao Shi. 2024. "Angle of Attack Characteristics of Full-Active and Semi-Active Flapping Foil Propulsors" Water 16, no. 20: 2957. https://doi.org/10.3390/w16202957
APA StyleMei, L., Yan, W., Zhou, J., Tang, Y., & Shi, W. (2024). Angle of Attack Characteristics of Full-Active and Semi-Active Flapping Foil Propulsors. Water, 16(20), 2957. https://doi.org/10.3390/w16202957