
Dual Domain Decomposition Method for High-Resolution 3D Simulation of Groundwater Flow and Transport

 ,
,  ,
, 
Abstract
1. Introduction
- Finely grained subdomain sizes, enabling a low-cost and parallel solution for linear subsystems decoupled from the large domain;
- An efficient combination of subsystem solutions, enabling the seamless integration of subsystem solvers into a global solver for scalable groundwater simulations.
2. Methods
2.1. Governing Equations and Discrete Solution Methods
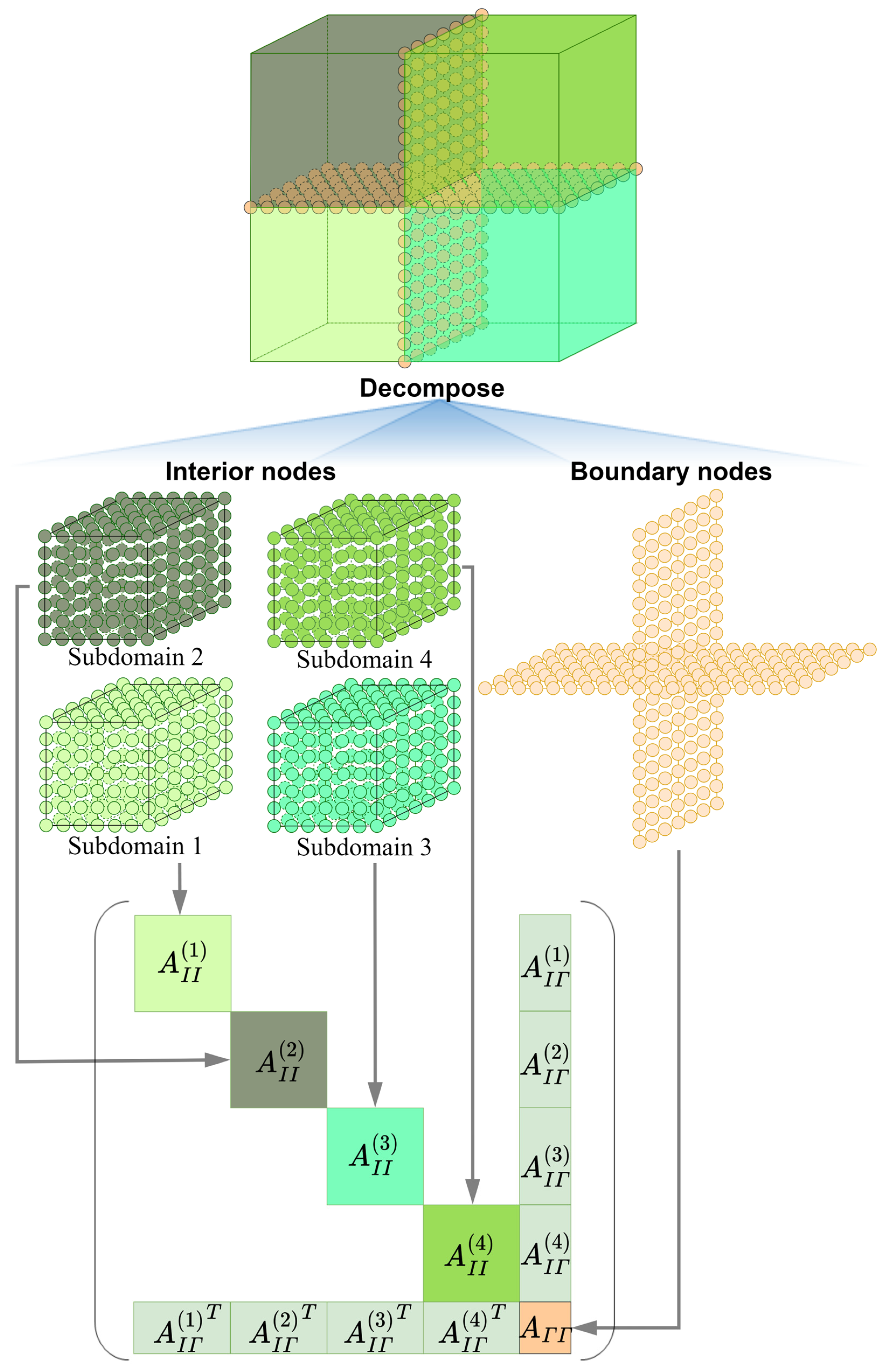
2.2. Domain Decomposition Framework: Substructuring of Groundwater Flow and Transport Systems
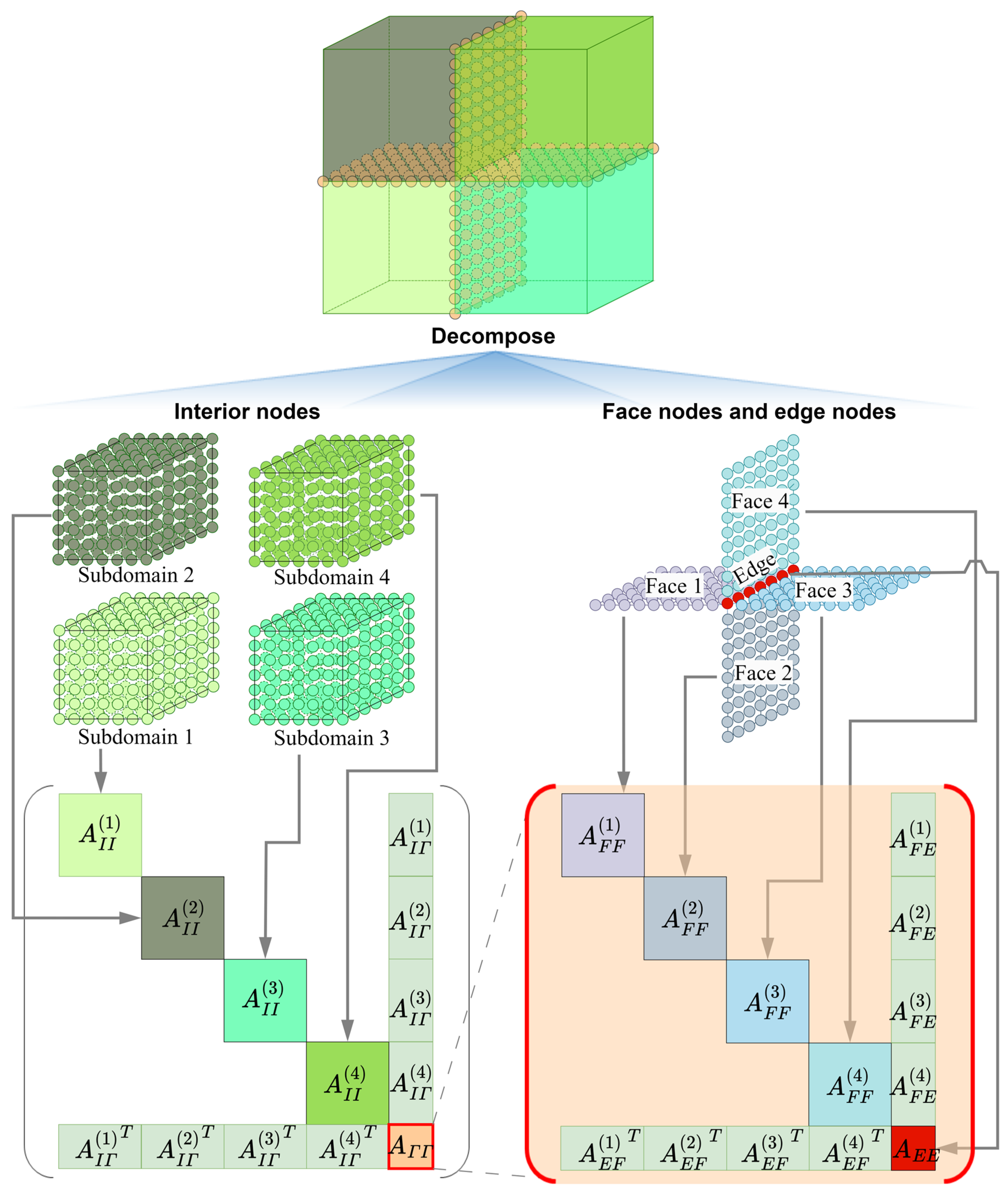
2.3. Domain Decomposition Preconditioner: Another Level of Substructuring
2.4. Solution of Subdomain Linear Systems
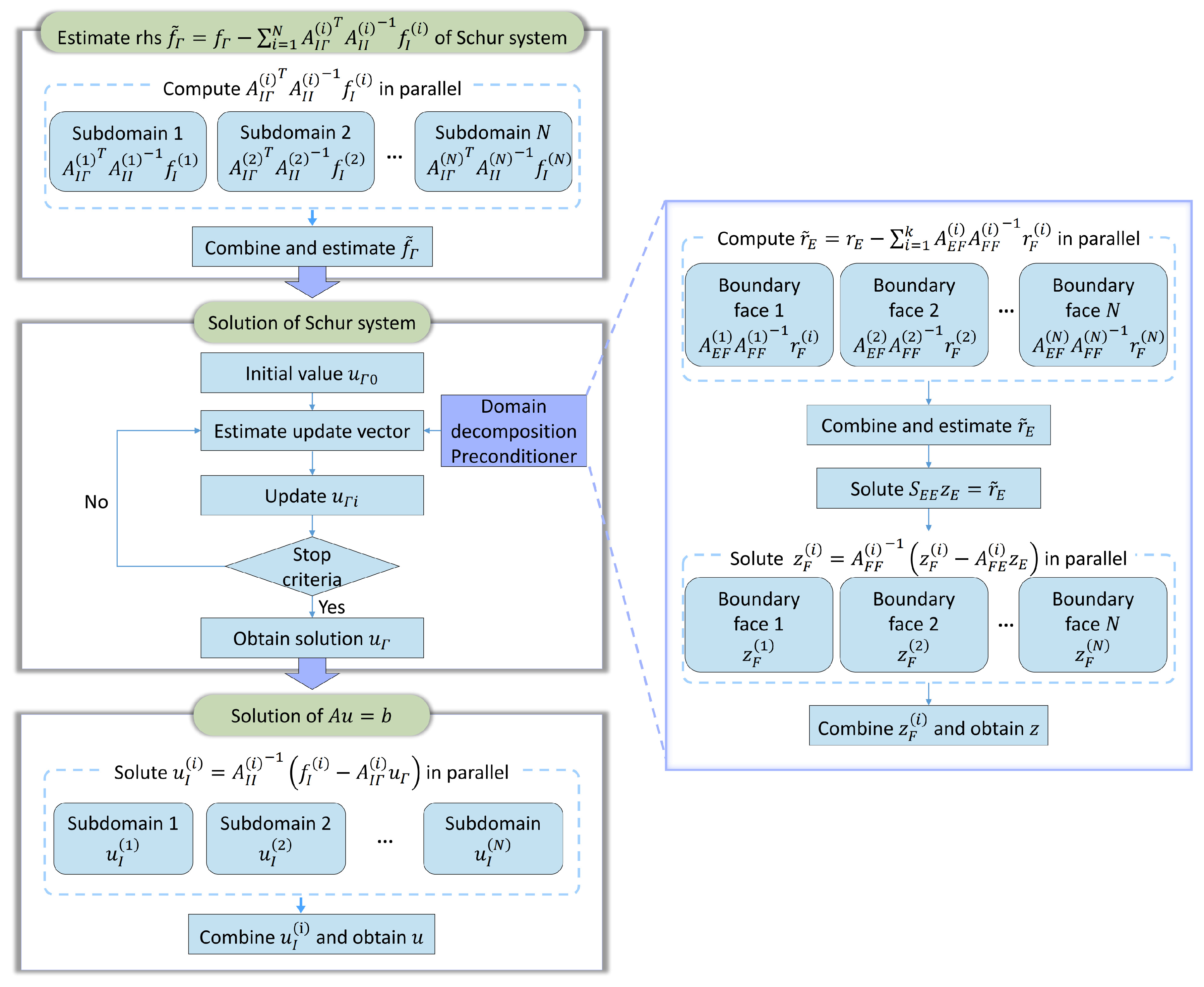
2.5. Algorithm and Implementation
| Algorithm 1. Dual-domain decomposition for the solution of linear system discretized from groundwater flow and solute transport equations |
| Input: Sets of blocks , , , , , , , , , and ; Sets of matrix factorization for blocks of interior and face nodes , , and . Ouput: // Equation (8b) parallel for do ← LinearSolver() ← end parallel for ← // Equation (7) Preconditioner ← DomainDecompositionPreconditioner PrecondParam ← ,,,, ← SchurSystemSolver(,,, , , Preconditioner, PrecondParam) // Equation (6) parallel for do ← ← LinearSolver() end parallel for ← Reorder() |
| Algorithm 2. Domain decomposition preconditioner |
| function DomainDecompositionPreconditioner (PrecondParam ← ,, }, ,}) // Equation (18b) parallel for do ← LinearSolver() ← end parallel for ← // Equation (17) Preconditioner ← IncompleteCGPreconditioner PrecondParam ← ← SchurSystemSolver(, ,, , , Preconditioner) // Equation (16) parallel for do ← ← LinearSolver( ) end parallel for return ← Reorder() end |
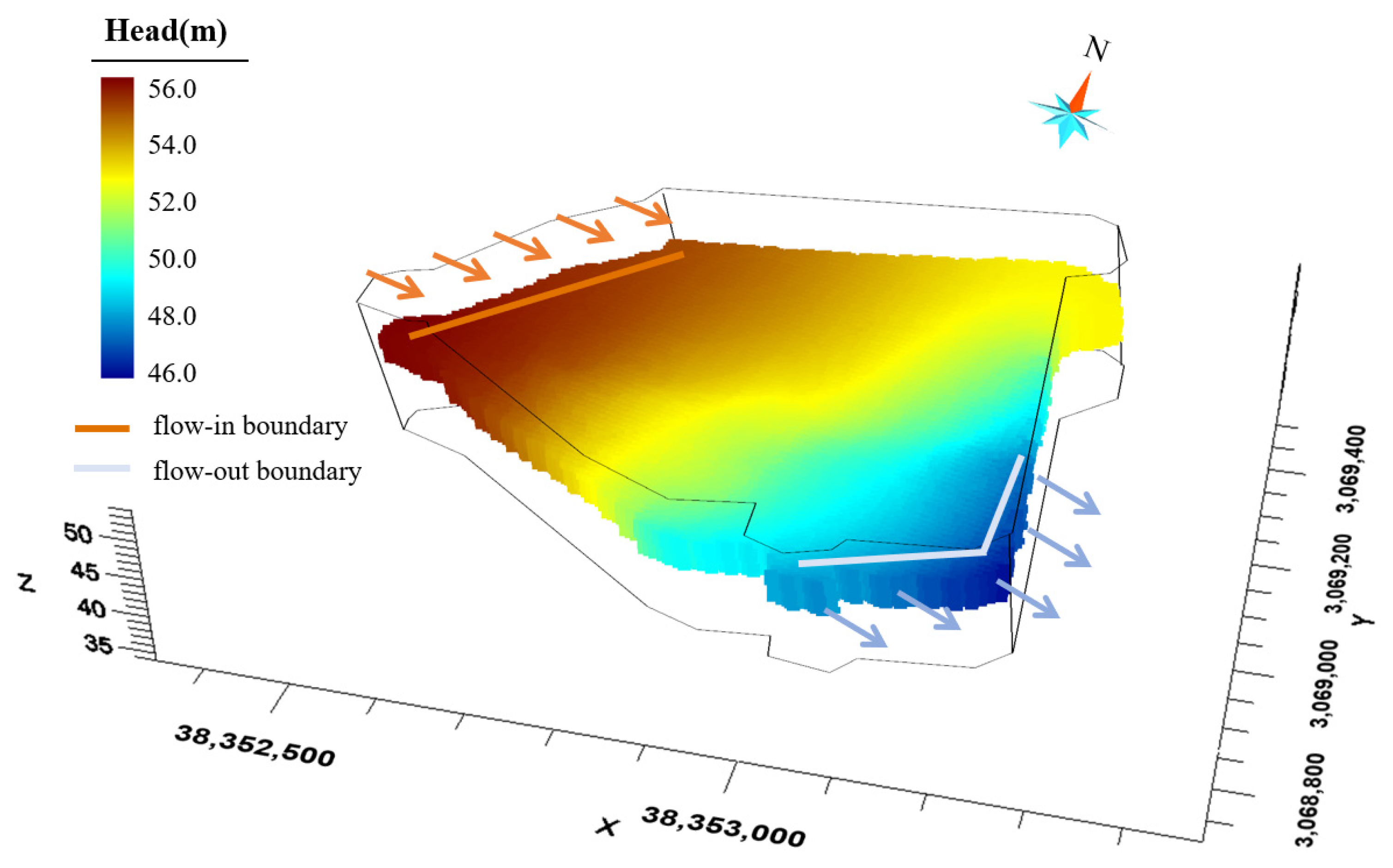
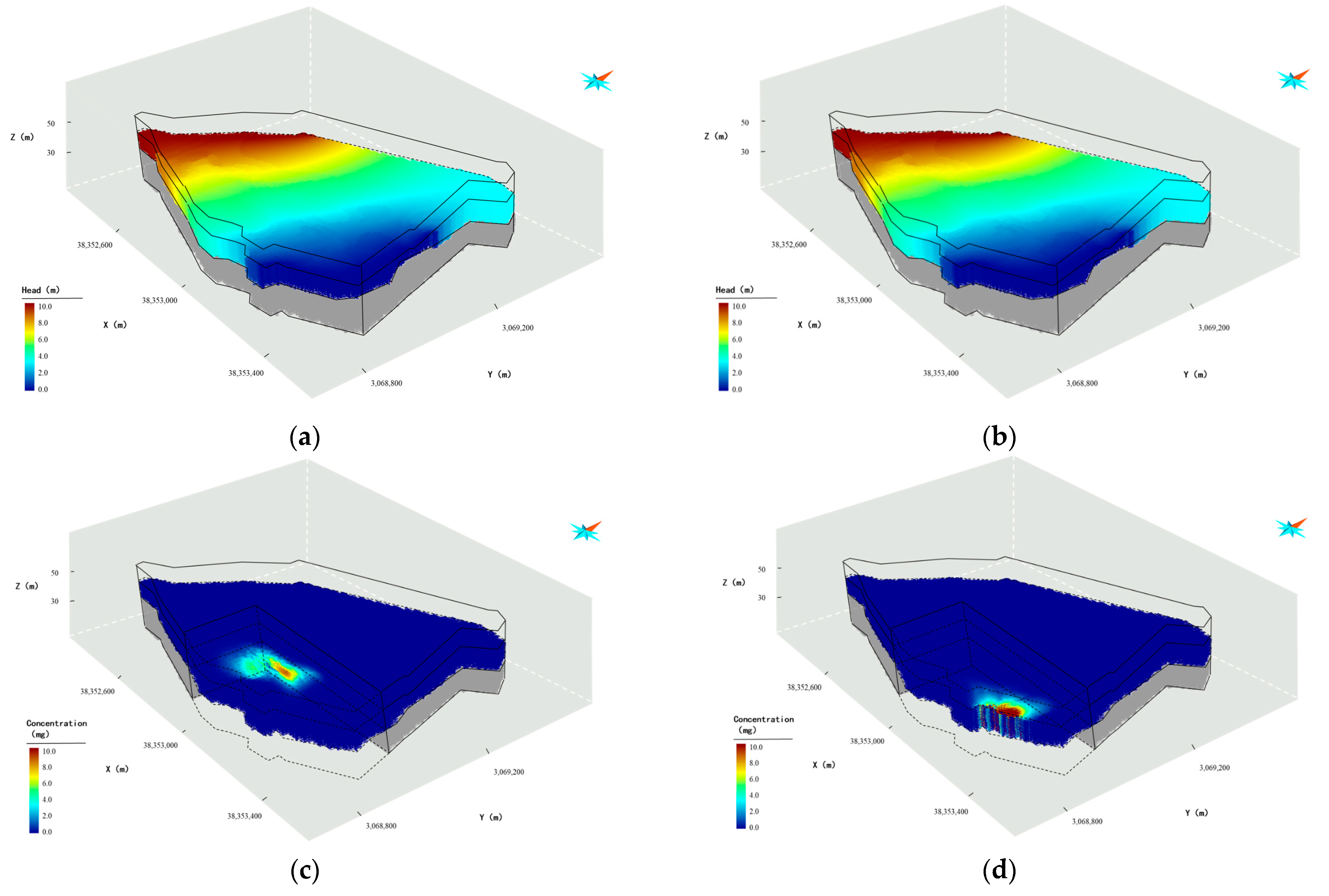
3. Study Area and Data Preparation
4. Results and Discussion
4.1. Performance of the Dual-Domain Decomposition Method
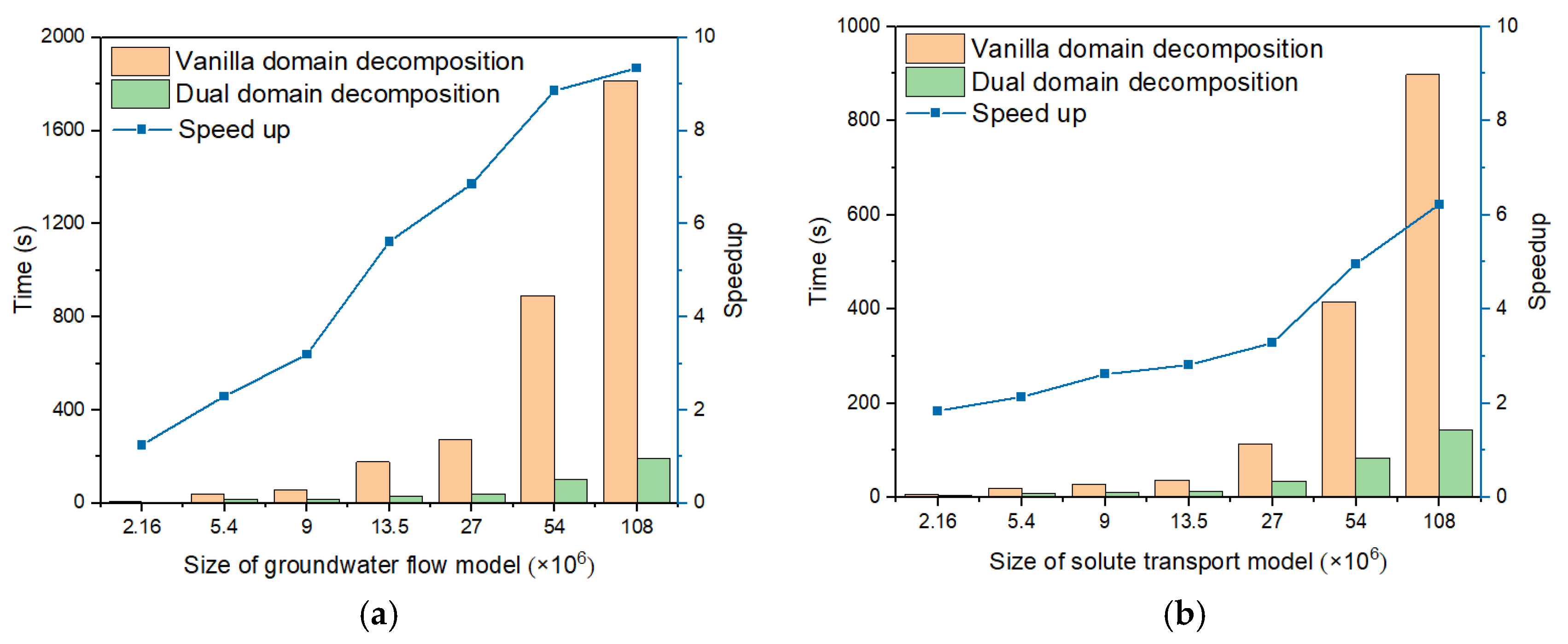
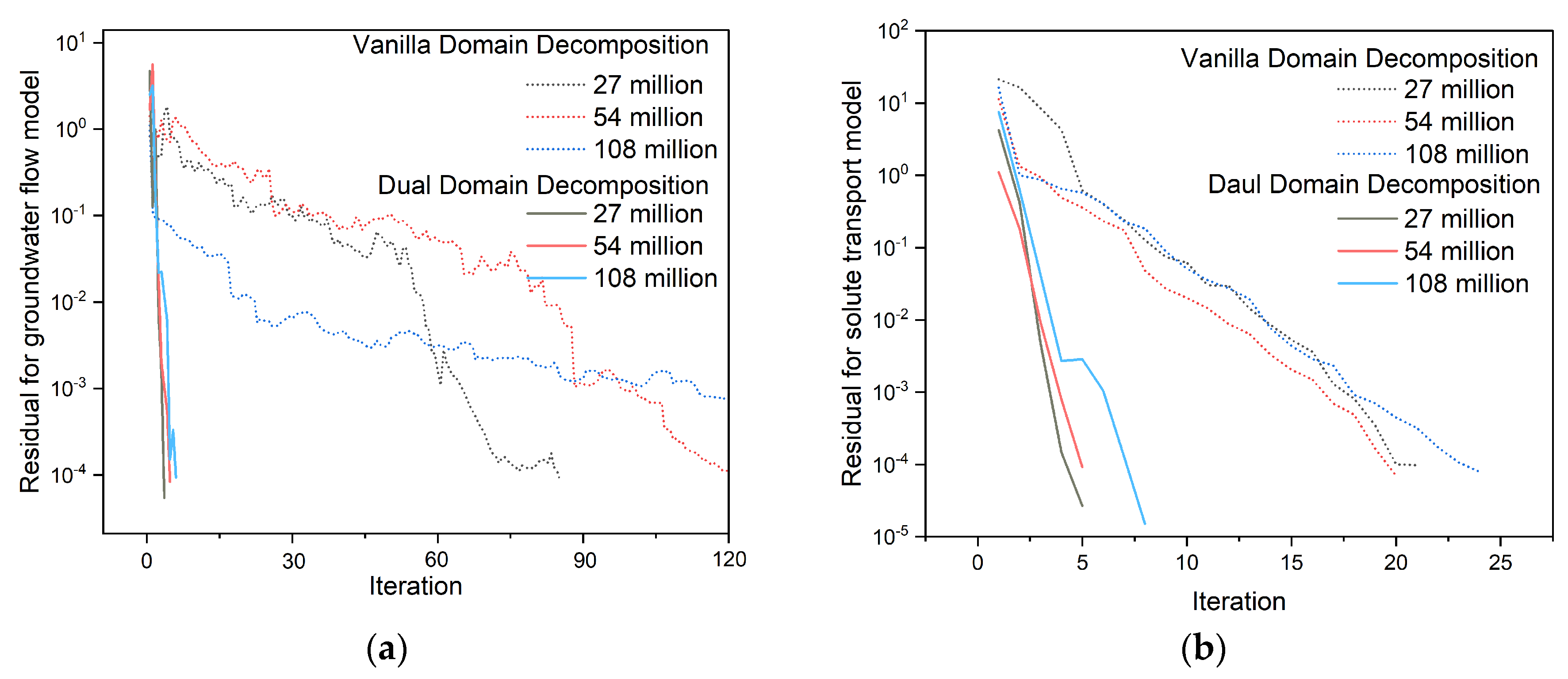
4.2. Comparision with Dual-Domain Decomposition Method
4.3. Comparision with Algebraic Multigrid Preconditioned Method
5. Conclusions
- (1)
- An additional level of domain decomposition is strategically devised to address the efficiency problem associated with solving the Schur system, a common bottleneck in vanilla domain decomposition methods. The tailored domain decomposition preconditioner enables the parallelization of the preconditioning process, ensuring a faster convergence rate compared with that of traditional Neumann–Neumann preconditioners when solving the Schur system;
- (2)
- The enhanced efficiency afforded by the proposed method allows for the partitioning of large-scale groundwater simulation problems into finely grained subdomains. This significantly reduces the computational overhead required for solving subdomains, resulting in notable speedups and memory savings during the solution process;
- (3)
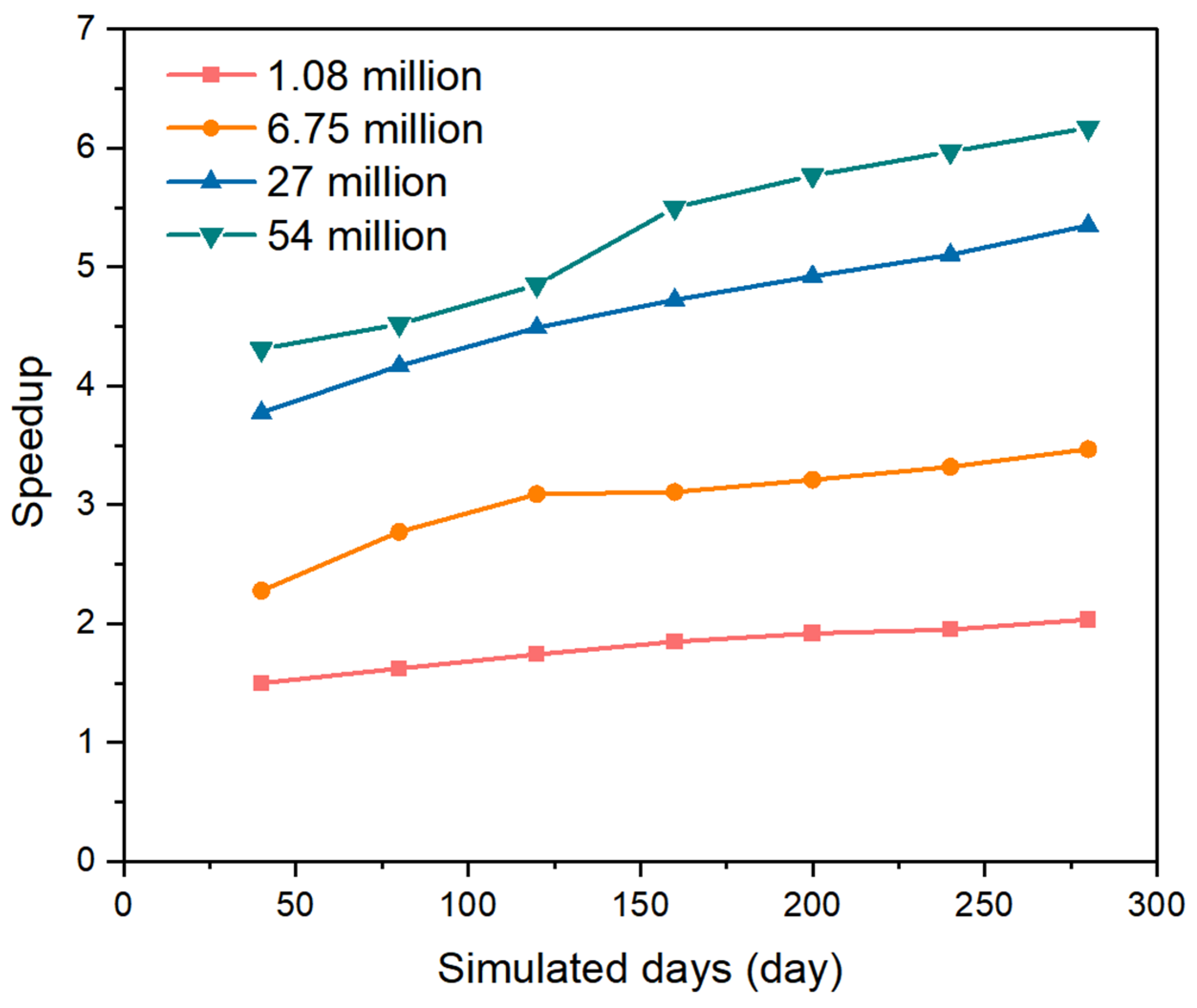
- Compared to the vanilla domain decomposition method, our approach achieves efficient performance boosts in solving the Schur system and thus enables finely grained subdomains. For an extremely large groundwater flow and transport problem with 108 million degrees of freedom, these characteristics lead to 8.617× and 4.541× speedups for groundwater flow and transport scenarios, respectively, and enable the use of a precomputed matrix factorization trick with an optimal number of subdomains to enhance its performance in time-sequential simulations;
- (4)
- Compared to the AMG preconditioned method, our approach offers a well-established parallelization mechanism and lower memory costs. When solving a problem with 108 million degrees of freedom, these characteristics result in 4.643× and 5.515× speedups for groundwater flow and transport scenarios, respectively. Moreover, our method supports efficient time-sequential simulations, which are not feasible with the AMG preconditioned method due to memory overload.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Algorithm for Solution of Schur Complement System
| Algorithm A1. BiCGSTAB Solver of Schur system |
| >// Compute of according to Equations (8a) and (18a) function ComputeSchurComplementSystem(, , , , ) parallel for do ← ← LinearSolver() ← end parallel for ← return end // BiCGSTAB for Solution of Equations (7) and (16) function SchurSystemSolver(, , , , , Precondioner, PrecondParam) ← InitialGuess() ← ComputeSchurComplementSystem // ← ← ← ← ← ← ← for = 1, 2, 3, … ← ← ← ← Precondioner(PrecondParam, ) // ← ComputeSchurComplementSystem // ← ← ← Precondioner(PrecondParam, ) // ← ← Precondioner(PrecondParam, ) // ← ← if converges then break ← end for return end |
References
- Herbert, A.; Jackson, C.; Lever, D. Coupled groundwater flow and solute transport with fluid density strongly dependent upon concentration. Water Resour. Res. 1988, 24, 1781–1795. [Google Scholar] [CrossRef]
- Tompson, A.F.; Gelhar, L.W. Numerical simulation of solute transport in three-dimensional, randomly heterogeneous porous media. Water Resour. Res. 1990, 26, 2541–2562. [Google Scholar] [CrossRef]
- Scheibe, T.; Yabusaki, S. Scaling of flow and transport behavior in heterogeneous groundwater systems. Adv. Water Resour. 1998, 22, 223–238. [Google Scholar] [CrossRef]
- Voss, C.I.; Provost, A.M. SUTRA: A Model for 2D or 3D Saturated-Unsaturated, Variable-Density Ground-Water Flow with Solute or Energy Transport; US Geological Survey: Reston, VA, USA, 2002.
- Haws, N.W.; Rao, P.S.C.; Simunek, J.; Poyer, I.C. Single-porosity and dual-porosity modeling of water flow and solute transport in subsurface-drained fields using effective field-scale parameters. J. Hydrol. 2005, 313, 257–273. [Google Scholar] [CrossRef]
- Neven, K.; Sorab, P. Modeling of groundwater flow and transport in coastal karst aquifers. Hydrogeol. J. 2021, 29, 249–258. [Google Scholar]
- Konikow, L.F. The secret to successful solute-transport modeling. Groundwater 2011, 49, 144–159. [Google Scholar] [CrossRef] [PubMed]
- Deng, H.; Zhou, S.; He, Y.; Lan, Z.; Zou, Y.; Mao, X. Efficient calibration of groundwater contaminant transport models using bayesian optimization. Toxics 2023, 11, 438. [Google Scholar] [CrossRef] [PubMed]
- Esposito, J.M.; Kumar, V.; Pappas, G.J. Accurate event detection for simulating hybrid systems. In Proceedings of the Hybrid Systems: Computation and Control: 4th International Workshop, HSCC 2001, Rome, Italy, 28–30 March 2001; Proceedings 4. pp. 204–217. [Google Scholar]
- Maxwell, R.; Condon, L.; Kollet, S. A high-resolution simulation of groundwater and surface water over most of the continental US with the integrated hydrologic model ParFlow v3. Geosci. Model Dev. 2015, 8, 923–937. [Google Scholar] [CrossRef]
- Park, Y.-J.; Sudicky, E.; Panday, S.; Sykes, J.; Guvanasen, V. Application of implicit sub-time stepping to simulate flow and transport in fractured porous media. Adv. Water Resour. 2008, 31, 995–1003. [Google Scholar] [CrossRef]
- Sreekanth, J.; Moore, C. Novel patch modelling method for efficient simulation and prediction uncertainty analysis of multi-scale groundwater flow and transport processes. J. Hydrol. 2018, 559, 122–135. [Google Scholar] [CrossRef]
- Wang, H.; Fu, X.; Wang, G.; Li, T.; Gao, J. A common parallel computing framework for modeling hydrological processes of river basins. Parallel Comput. 2011, 37, 302–315. [Google Scholar] [CrossRef]
- Van der Vorst, H.A. Bi-CGSTAB: A fast and smoothly converging variant of Bi-CG for the solution of nonsymmetric linear systems. SIAM J. Sci. Stat. Comput. 1992, 13, 631–644. [Google Scholar] [CrossRef]
- Meyer, P.D.; Valocchi, A.J.; Ashby, S.F.; Saylor, P.E. A numerical investigation of the conjugate gradient method as applied to three-dimensional groundwater flow problems in randomly heterogeneous porous media. Water Resour. Res. 1989, 25, 1440–1446. [Google Scholar] [CrossRef]
- Mahinthakumar, G.; Valocchi, A.J. Application of the connection machine to flow and transport problems in three-dimensional heterogeneous aquifers. Adv. Water Resour. 1992, 15, 289–302. [Google Scholar] [CrossRef]
- Saad, Y. Iterative Methods for Sparse Linear Systems; SIAM: Philadelphia, PA, USA, 2003. [Google Scholar]
- Trottenberg, U.; Oosterlee, C.W.; Schuller, A. Multigrid; Elsevier: Amsterdam, The Netherlands, 2000. [Google Scholar]
- Ashby, S.F.; Falgout, R.D. A parallel multigrid preconditioned conjugate gradient algorithm for groundwater flow simulations. Nucl. Sci. Eng. 1996, 124, 145–159. [Google Scholar] [CrossRef]
- Watson, I.; Crouch, R.; Bastian, P.; Oswald, S. Advantages of using adaptive remeshing and parallel processing for modelling biodegradation in groundwater. Adv. Water Resour. 2005, 28, 1143–1158. [Google Scholar] [CrossRef]
- Sinha, E.; Minsker, B.S. Multiscale island injection genetic algorithms for groundwater remediation. Adv. Water Resour. 2007, 30, 1933–1942. [Google Scholar] [CrossRef]
- Beisman, J.J.; Maxwell, R.M.; Navarre-Sitchler, A.K.; Steefel, C.I.; Molins, S. ParCrunchFlow: An efficient, parallel reactive transport simulation tool for physically and chemically heterogeneous saturated subsurface environments. Comput. Geosci. 2015, 19, 403–422. [Google Scholar] [CrossRef]
- Le, P.V.; Kumar, P.; Valocchi, A.J.; Dang, H.-V. GPU-based high-performance computing for integrated surface–sub-surface flow modeling. Environ. Model. Softw. 2015, 73, 1–13. [Google Scholar] [CrossRef]
- Verkaik, J.; Van Engelen, J.; Huizer, S.; Bierkens, M.F.; Lin, H.; Essink, G.O. Distributed memory parallel computing of three-dimensional variable-density groundwater flow and salt transport. Adv. Water Resour. 2021, 154, 103976. [Google Scholar] [CrossRef]
- Garrett, C.A.; Huang, J.; Goltz, M.N.; Lamont, G.B. Parallel real-valued genetic algorithms for bioremediation optimization of TCE-contaminated groundwater. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999. [Google Scholar]
- Wu, Y.-S.; Zhang, K.; Ding, C.; Pruess, K.; Elmroth, E.; Bodvarsson, G. An efficient parallel-computing method for modeling nonisothermal multiphase flow and multicomponent transport in porous and fractured media. Adv. Water Resour. 2002, 25, 243–261. [Google Scholar] [CrossRef]
- Mills, R.T.; Lu, C.; Lichtner, P.C.; Hammond, G.E. Simulating subsurface flow and transport on ultrascale computers using PFLOTRAN. J. Phys. Conf. Ser. 2007, 78, 012051. [Google Scholar] [CrossRef]
- Wei, X.; Bailey, R.T.; Records, R.M.; Wible, T.C.; Arabi, M. Comprehensive simulation of nitrate transport in coupled surface-subsurface hydrologic systems using the linked SWAT-MODFLOW-RT3D model. Environ. Model. Softw. 2019, 122, 104242. [Google Scholar] [CrossRef]
- Mahinthakumar, G. Pgrem3d: Parallel Groundwater Transport and Remediation Codes. Users Guide. 1999. Available online: http://www4.ncsu.edu/~gmkumar/pgrem3d.pdf (accessed on 20 May 2024).
- Šimůnek, J.; Vogel, T.; van Genuchten, M.T. The SWMS-2D-Code for Similating Water Flow and Solute Transport in Two-Dimensional Variably Saturated Media: Version 1.2; US Salinity Laboratory: Riverside, CA, USA, 1994.
- Braess, D.; Dahmen, W.; Wieners, C. A multigrid algorithm for the mortar finite element method. SIAM J. Numer. Anal. 1999, 37, 48–69. [Google Scholar] [CrossRef]
- Brito-Loeza, C.; Chen, K. Multigrid algorithm for high order denoising. SIAM J. Imaging Sci. 2010, 3, 363–389. [Google Scholar] [CrossRef]
- Kourakos, G.; Harter, T. Parallel simulation of groundwater non-point source pollution using algebraic multigrid preconditioners. Comput. Geosci. 2014, 18, 851–867. [Google Scholar] [CrossRef]
- Sbai, M.A.; Larabi, A. On solving groundwater flow and transport models with algebraic multigrid preconditioning. Groundwater 2021, 59, 100–108. [Google Scholar] [CrossRef]
- Ji, X.; Cheng, T.; Wang, Q. CUDA-based solver for large-scale groundwater flow simulation. Eng. Comput. 2012, 28, 13–19. [Google Scholar] [CrossRef]
- Carlotto, T.; da Silva, R.V.; Grzybowski, J.M.V. A GPGPU-accelerated implementation of groundwater flow model in unconfined aquifers for heterogeneous and anisotropic media. Environ. Model. Softw. 2018, 101, 64–72. [Google Scholar] [CrossRef]
- Sun, H.; Ji, X.; Wang, X.-S. Parallelization of groundwater flow simulation on multiple GPUs. In Proceedings of the 3rd International Conference on High Performance Compilation, Computing and Communications, Xi’an, China, 8–10 March 2019; pp. 50–54. [Google Scholar]
- Ji, X.; Luo, M.; Wang, X.S. Accelerating streamline tracking in groundwater flow modeling on GPUs. Groundwater 2020, 58, 638–644. [Google Scholar] [CrossRef]
- Hou, Q.; Miao, C.; Chen, S.; Sun, Z.; Karemat, A. A Lagrangian particle model on GPU for contaminant transport in groundwater. Comput. Part. Mech. 2023, 10, 587–601. [Google Scholar] [CrossRef]
- Schwarz, H.A. Ueber einige Abbildungsaufgaben. J. Reine Angew. Math. 1869, 1869, 105–120. [Google Scholar]
- Chan, T.F. Third International Symposium on Domain Decomposition Methods for Partial Differential Equations; SIAM: Philadelphia, PA, USA, 1990. [Google Scholar]
- Ewing, R.E. A survey of domain decomposition techniques and their implementation. Adv. Water Resour. 1990, 13, 117–125. [Google Scholar] [CrossRef]
- Beckie, R.; Wood, E.F.; Aldama, A.A. Mixed finite element simulation of saturated groundwater flow using a multigrid accelerated domain decomposition technique. Water Resour. Res. 1993, 29, 3145–3157. [Google Scholar] [CrossRef]
- Elmroth, E.; Ding, C.; Wu, Y.-S. High performance computations for large scale simulations of subsurface multiphase fluid and heat flow. J. Supercomput. 2001, 18, 235–258. [Google Scholar] [CrossRef]
- Jenkins, E.W.; Kees, C.E.; Kelley, C.T.; Miller, C.T. An aggregation-based domain decomposition preconditioner for groundwater flow. SIAM J. Sci. Comput. 2001, 23, 430–441. [Google Scholar] [CrossRef]
- Gräsle, W.; Kessels, W. A RAM-economizing domain decomposition technique for regional high-resolution groundwater simulation. Hydrogeol. J. 2003, 11, 304–310. [Google Scholar] [CrossRef]
- Discacciati, M. Domain Decomposition Methods for the Coupling of Surface and Groundwater Flows; EPFL: Lausanne, Switzerland, 2004. [Google Scholar]
- Huang, Y.; Zhou, Z.; Wang, J.; Dou, Z. Simulation of groundwater flow in fractured rocks using a coupled model based on the method of domain decomposition. Environ. Earth Sci. 2014, 72, 2765–2777. [Google Scholar] [CrossRef]
- Xie, Y.; Wu, J.; Xue, Y.; Xie, C.; Ji, H. A domain decomposed finite element method for solving Darcian velocity in heterogeneous porous media. J. Hydrol. 2017, 554, 32–49. [Google Scholar] [CrossRef]
- Liang, D.; Zhou, Z. The conservative splitting domain decomposition method for multicomponent contamination flows in porous media. J. Comput. Phys. 2020, 400, 108974. [Google Scholar] [CrossRef]
- Taylor, G.I. Dispersion of soluble matter in solvent flowing slowly through a tube. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1953, 219, 186–203. [Google Scholar]
- Bear, J. On the tensor form of dispersion in porous media. J. Geophys. Res. 1961, 66, 1185–1197. [Google Scholar] [CrossRef]
- Zheng, C.; Bennett, G.D. Applied Contaminant Transport Modeling; Wiley-Interscience New York: New York, NY, USA, 2002; Volume 2. [Google Scholar]
- Gaidamour, J.; Hénon, P. A parallel direct/iterative solver based on a Schur complement approach. In Proceedings of the 2008 11th IEEE International Conference on Computational Science and Engineering, Sao Paulo, Brazil, 16–18 July 2008; pp. 98–105. [Google Scholar]
- Aristidou, P.; Fabozzi, D.; Van Cutsem, T. Dynamic simulation of large-scale power systems using a parallel Schur-complement-based decomposition method. IEEE Trans. Parallel Distrib. Syst. 2013, 25, 2561–2570. [Google Scholar] [CrossRef]
- Jaysaval, P.; Shantsev, D.; de la Kethulle de Ryhove, S. Fast multimodel finite-difference controlled-source electromagnetic simulations based on a Schur complement approach. Geophysics 2014, 79, E315–E327. [Google Scholar] [CrossRef]
- Peiret, A.; Andrews, S.; Kövecses, J.; Kry, P.G.; Teichmann, M. Schur complement-based substructuring of stiff multibody systems with contact. ACM Trans. Graph. (TOG) 2019, 38, 1–17. [Google Scholar] [CrossRef]
- Ulybyshev, M.; Kintscher, N.; Kahl, K.; Buividovich, P. Schur complement solver for Quantum Monte-Carlo simulations of strongly interacting fermions. Comput. Phys. Commun. 2019, 236, 118–127. [Google Scholar] [CrossRef]
- Toselli, A.; Widlund, O. Domain Decomposition Methods-Algorithms and Theory; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2004; Volume 34. [Google Scholar]
- Mathew, T.P. Domain Decomposition Methods for the Numerical Solution of Partial Differential Equations; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Zou, Y.; Yousaf, M.S.; Yang, F.; Deng, H.; He, Y. Surrogate-Based Uncertainty Analysis for Groundwater Contaminant Transport in a Chromium Residue Site Located in Southern China. Water 2024, 16, 638. [Google Scholar] [CrossRef]
- Diersch, H.-J.G. FEFLOW: Finite Element Modeling of Flow, Mass and Heat Transport in Porous and Fractured Media; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- May, D.A.; Sanan, P.; Rupp, K.; Knepley, M.G.; Smith, B.F. Extreme-scale multigrid components within PETSc. In Proceedings of the Platform for Advanced Scientific Computing Conference, Lausanne, Switzerland, 8–10 June 2016; pp. 1–12. [Google Scholar]
- Balay, S.; Abhyankar, S.; Adams, M.; Brown, J.; Brune, P.; Buschelman, K.; Dalcin, L.; Dener, A.; Eijkhout, V.; Gropp, W. PETSc Users Manual; Argonne National Laboratory: Lemont, IL, USA, 2019. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scale | Grid Size(m) | Number of Grids in Each Direction | ||||
|---|---|---|---|---|---|---|
| X | Y | Z | X | Y | Z | |
| 1,080,000 | 10 | 10 | 0.5 | 120 | 150 | 60 |
| 2,160,000 | 5 | 5 | 1 | 240 | 300 | 30 |
| 5,400,000 | 4.5 | 4.5 | 0.5 | 300 | 300 | 60 |
| 6,750,000 | 4 | 4 | 0.5 | 300 | 375 | 60 |
| 9,000,000 | 3.5 | 3.5 | 0.5 | 400 | 375 | 60 |
| 13,500,000 | 2 | 2 | 1 | 600 | 750 | 30 |
| 27,000,000 | 2 | 2 | 0.5 | 600 | 750 | 60 |
| 54,000,000 | 1.5 | 1.5 | 0.5 | 1200 | 750 | 60 |
| 108,000,000 | 1 | 1 | 0.5 | 1200 | 1500 | 60 |
| #.Dofs | Groundwater Flow | Groundwater Transport | ||||||
|---|---|---|---|---|---|---|---|---|
| #.Subdomains | #.Iterations | Schur (s) | Total (s) | #.Subdomains | #.Iterations | Schur (s) | Total (s) | |
| 13,500,000 | 40 | 12 | 0.532795 | 126.187 | 20 | 4 | 0.0258069 | 12.769 |
| 80 | 8 | 0.742615 | 86.0236 | 40 | 3 | 0.0320886 | 11.0436 | |
| 180 | 6 | 1.44983 | 46.5398 | 80 | 3 | 0.0412827 | 9.8365 | |
| 360 | 5 | 3.55114 | 29.4948 | 150 | 3 | 0.0687989 | 10.3101 | |
| 500 | 5 | 6.00332 | 49.4242 | 180 | 3 | 0.0768018 | 11.4264 | |
| 27,000,000 | 80 | 11 | 1.04149 | 264.314 | 20 | 4 | 0.0414583 | 40.6114 |
| 160 | 8 | 2.04289 | 162.173 | 40 | 3 | 0.0477507 | 33.7732 | |
| 360 | 6 | 4.84669 | 77.7762 | 80 | 3 | 0.0587087 | 27.8985 | |
| 400 | 6 | 5.59473 | 40.5947 | 150 | 3 | 0.0984913 | 28.7126 | |
| 450 | 5 | 7.28272 | 85.256 | 180 | 3 | 0.110725 | 29.075 | |
| 108,000,000 | 180 | 35 | 3.82804 | 659.22 | 40 | 4 | 0.0889159 | 144.339 |
| 240 | 34 | 6.25082 | 517.344 | 80 | 4 | 0.119546 | 130.989 | |
| 300 | 12 | 7.57162 | 211.722 | 100 | 3 | 0.251899 | 116.139 | |
| 600 | 10 | 33.4211 | 194.079 | 180 | 3 | 0.265036 | 134.533 | |
| 800 | 7 | 41.15969 | 432.267 | 240 | 3 | 0.350629 | 149.863 | |
| #.Dofs | Groundwater Flow | Groundwater Transport | ||||||
|---|---|---|---|---|---|---|---|---|
| #.Subdomains | #.Iterations | Schur (s) | Total (s) | #.Subdomains | #.Iterations | Schur (s) | Total (s) | |
| 13,500,000 | 80 | 115 | 1.91617 | 206.608 | 20 | 7 | 1.18273 | 35.08 |
| 100 | 113 | 2.04219 | 173.782 | 40 | 7 | 1.21301 | 34.58 | |
| 150 | 113 | 2.15086 | 362.008 | 60 | 7 | 1.41886 | 35.35 | |
| 27,000,000 | 100 | 126 | 4.16009 | 348.216 | 20 | 10 | 1.68527 | 105.09 |
| 150 | 126 | 4.179493 | 269.078 | 40 | 10 | 1.88841 | 104.00 | |
| 180 | 123 | 5.233974 | 324.146 | 60 | 11 | 2.37461 | 105.12 | |
| 108,000,000 | 150 | 137 | 8.358371 | 1932.62 | 40 | 10 | 5.80962 | 888.14 |
| 180 | 137 | 8.445143 | 1672.46 | 60 | 10 | 6.67187 | 876.72 | |
| 240 | 117 | 9.950672 | 1984.15 | 80 | 10 | 7.38562 | 881.48 | |
| Scales | Vanilla Domain Decomposition | Dual-Domain Decomposition | |||
|---|---|---|---|---|---|
| Iterations | Solution Time (s) | Iterations | Solution Time (s) | Speedup | |
| 2,160,000 | 24 | 5.60752 | 6 | 4.47508 | 1.253 |
| 5,400,000 | 36 | 37.5881 | 6 | 16.3776 | 2.295 |
| 9,000,000 | 87 | 58.0438 | 7 | 18.1569 | 3.197 |
| 13,500,000 | 118 | 177.883 | 7 | 31.6426 | 5.622 |
| 27,000,000 | 122 | 274.263 | 6 | 39.9694 | 6.862 |
| 54,000,000 | 123 | 891.416 | 8 | 100.641 | 8.857 |
| 108,000,000 | 151 | 1814.169 | 10 | 194.079 | 9.348 |
| Scales | Vanilla Domain Decomposition | Dual-Domain Decomposition | |||
|---|---|---|---|---|---|
| Iterations | Solution Time (s) | Iterations | Solution Time (s) | Speedup | |
| 2,160,000 | 13 | 8.63802 | 4 | 3.55728 | 2.403 |
| 5,400,000 | 15 | 24.7724 | 3 | 9.3891 | 2.563 |
| 9,000,000 | 15 | 32.7028 | 3 | 10.7667 | 2.990 |
| 13,500,000 | 14 | 40.8291 | 4 | 13.1502 | 3.045 |
| 27,000,000 | 17 | 158.1768 | 5 | 34.9801 | 4.541 |
| 54,000,000 | 17 | 495.139 | 5 | 83.895 | 5.904 |
| 108,000,000 | 21 | 979.871 | 8 | 144.2816 | 6.788 |
| Simulated Time (day) | 1.08 Million Model | 6.75 Million Model | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| DDD (s) | VDD | DDD (s) | VDD | |||||||
| Opt. (s) | Speedup | Same (s) | Speedup | Opt. (s) | Speedup | Same (s) | Speedup | |||
| 40 | 17.19 | 24.36 | 1.42 | 27.59 | 1.61 | 55.81 | 122.05 | 2.19 | 140.94 | 2.53 |
| 80 | 25.57 | 40.65 | 1.59 | 43.81 | 1.71 | 87.01 | 235.50 | 2.71 | 264.34 | 3.04 |
| 120 | 32.59 | 56.36 | 1.73 | 59.44 | 1.82 | 113.00 | 351.37 | 3.11 | 378.29 | 3.35 |
| 160 | 40.88 | 76.25 | 1.87 | 79.50 | 1.95 | 145.93 | 460.98 | 3.16 | 497.82 | 3.41 |
| 200 | 49.25 | 96.57 | 1.96 | 99.91 | 2.03 | 176.96 | 571.64 | 3.23 | 619.87 | 3.50 |
| 240 | 56.34 | 113.51 | 2.02 | 117.12 | 2.08 | 202.86 | 680.53 | 3.36 | 739.50 | 3.65 |
| 280 | 64.71 | 133.92 | 2.07 | 137.43 | 2.12 | 235.01 | 790.47 | 3.36 | 858.12 | 3.65 |
| Simulated Time (day) | 27 Million Model | 108 Million Model | ||||||||
| DDD (s) | VDD | DDD (s) | VDD | |||||||
| Opt. (s) | Speedup | Same (s) | Speedup | Opt. (s) | Speedup | Same (s) | Speedup | |||
| 40 | 308.19 | 893.31 | 2.90 | 1210.17 | 3.93 | 3644.59 | N/A | N/A | 21,992.52 | 6.03 |
| 80 | 397.48 | 1307.08 | 3.29 | 1782.37 | 4.48 | 6648.55 | N/A | N/A | 41,686.35 | 6.27 |
| 120 | 508.20 | 1835.59 | 3.61 | 2458.92 | 4.84 | 9360.13 | N/A | N/A | 63,472.67 | 6.78 |
| 160 | 639.35 | 2519.05 | 3.94 | 3370.02 | 5.27 | 11,779.57 | N/A | N/A | 85,143.74 | 7.23 |
| 00 | 764.28 | 3202.51 | 4.19 | 4251.11 | 5.56 | 13,914.12 | N/A | N/A | 111,016.07 | 7.98 |
| 240 | 883.11 | 3886.06 | 4.40 | 5032.31 | 5.70 | 15,972.98 | N/A | N/A | 130,371.25 | 8.16 |
| 280 | 958.93 | 4339.93 | 4.53 | 5634.61 | 5.88 | 17618.69 | N/A | N/A | 149,036.50 | 8.46 |
| #.Dof | Groundwater Flow | Groundwater Transport | ||||
|---|---|---|---|---|---|---|
| AMG (s) | DDD (s) | Speedup | AMG (s) | DDD (s) | Speedup | |
| 2,160,000 | 5.8122 | 4.47508 | 1.299 | 5.8579 | 3.55728 | 1.647 |
| 5,400,000 | 28.4848 | 16.3776 | 1.739 | 16.9661 | 9.3891 | 1.807 |
| 9,000,000 | 32.7345 | 18.15694 | 1.803 | 24.7465 | 10.7667 | 2.298 |
| 13,500,000 | 65.766 | 31.6426 | 2.078 | 32.9329 | 13.1502 | 2.504 |
| 27,000,000 | 99.8649 | 39.9694 | 2.499 | 88.3089 | 34.9801 | 2.524 |
| 54,000,000 | 414.229 | 100.641 | 4.116 | 385.892 | 83.895 | 4.600 |
| 108,000,000 | 901.023 | 194.079 | 4.643 | 795.7181 | 144.2816 | 5.515 |
| Time (day) | 1.08 Million | 6.75 Million | 27 Million | 54 Million | 108 Million | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AMG (s) | DDD (s) | Speedup | AMG (s) | DDD (s) | Speedup | AMG (s) | DDD (s) | Speedup | AMG (s) | DDD (s) | Speedup | AMG (s) | DDD (s) | Speedup | |
| 40 | 25.83 | 17.19 | 1.50 | 127.11 | 55.81 | 2.278 | 1163.53 | 308.19 | 3.78 | 5199.29 | 1207.56 | 4.31 | N/A | 3644.59 | N/A |
| 80 | 41.52 | 25.57 | 1.62 | 241.37 | 87.01 | 2.773 | 1657.53 | 397.48 | 4.17 | 7606.45 | 1682.26 | 4.52 | N/A | 6648.55 | N/A |
| 120 | 56.79 | 32.59 | 1.742 | 349.00 | 113.00 | 3.089 | 2281.97 | 508.20 | 4.49 | 10,595.04 | 2184.81 | 4.85 | N/A | 9360.13 | N/A |
| 160 | 75.65 | 40.88 | 1.85 | 453.52 | 145.93 | 3.108 | 3021.25 | 639.35 | 4.73 | 14,144.13 | 2573.68 | 5.50 | N/A | 11,779.57 | N/A |
| 200 | 94.56 | 49.25 | 1.92 | 568.02 | 176.96 | 3.21 | 3762.34 | 764.28 | 4.92 | 17,650.56 | 3057.26 | 5.77 | N/A | 13,914.12 | N/A |
| 240 | 110.00 | 56.34 | 1.95 | 673.29 | 202.86 | 3.319 | 4506.21 | 883.11 | 5.10 | 21,120.64 | 3535.43 | 5.97 | N/A | 15,972.98 | N/A |
| 280 | 131.81 | 64.71 | 2.04 | 815.13 | 235.01 | 3.468 | 5130.56 | 958.93 | 5.35 | 23,414.58 | 3796.48 | 6.17 | N/A | 17,618.69 | N/A |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, H.; Li, J.; Huang, J.; Zou, Y.; Liu, Y.; Chen, Y.; Zheng, Y.; Mao, X. Dual Domain Decomposition Method for High-Resolution 3D Simulation of Groundwater Flow and Transport. Water 2024, 16, 1864. https://doi.org/10.3390/w16131864
Deng H, Li J, Huang J, Zou Y, Liu Y, Chen Y, Zheng Y, Mao X. Dual Domain Decomposition Method for High-Resolution 3D Simulation of Groundwater Flow and Transport. Water. 2024; 16(13):1864. https://doi.org/10.3390/w16131864
Chicago/Turabian StyleDeng, Hao, Jiaxin Li, Jixian Huang, Yanhong Zou, Yu Liu, Yuxiang Chen, Yang Zheng, and Xiancheng Mao. 2024. "Dual Domain Decomposition Method for High-Resolution 3D Simulation of Groundwater Flow and Transport" Water 16, no. 13: 1864. https://doi.org/10.3390/w16131864
APA StyleDeng, H., Li, J., Huang, J., Zou, Y., Liu, Y., Chen, Y., Zheng, Y., & Mao, X. (2024). Dual Domain Decomposition Method for High-Resolution 3D Simulation of Groundwater Flow and Transport. Water, 16(13), 1864. https://doi.org/10.3390/w16131864