1. Introduction
In harbour environments and navigation channels, where the ship-to-bed clearance is minimal, it is important to focus on the effects caused by the ship’s propeller jet, the traditional propulsion system for ships. The ship’s rotating propeller, generally characterized by three or more blades, provides a thrust drawing in water, accelerating and discharging it downstream, resulting in a jet/wash and causing multiple effects. First, the jet can erode the seabed, generating significant bed scour. Secondly, it enhances the resuspension and transport of sediments on the seabed, also observed by Hammack et al. [
1], which can accumulate and eventually reduce the required draught for navigation and affect port functionality. In addition, if scouring occurs close to marine structures, it can also affect and compromise their stability. Therefore, for a proper harbor design, it is necessary to evaluate propeller-induced velocities on the seabed. This has been more essential in recent years due to the ever-increasing size of the ships and the requirement of more powerful propulsion systems, which potentially lead to more severe damage.
For an accurate analysis of seabed sediment dynamic processes, also over different timescales, numerical modelling represents a useful tool for port authorities and operators to guarantee operational activities and correct management of the port. An existing numerical model is that proposed by Wang et al. [
2], who focused on the computation of the propeller wash-induced resuspended sediment mass at a specific area through empirical expressions and ship traffic information, making the approach, though useful, limited and difficult to apply in wide areas where ship traffic is continuous and extensive. Moreover, the contribution of wash-induced resuspended sediments is added as a source term into an uncoupled model simulation to predict far-field movements of resuspended sediments without modifying the hydrodynamics (e.g., flow velocities) or the morphological evolution of the seabed. (e.g., bed scour). Other numerical methods, like those proposed by the US Army Engineer Research and Development Center [
1,
3], are capable of simulating a coupled representation of both propeller wash effects and sediment transport processes, including the formulation of ship-generated bed shear stress [
4] into the computational codes of sediment transport. In the work of Hammack et al. [
1], both the effects induced by the bow and the propeller on the bed shear stress are considered. Their results clearly underline the primary role of the propeller, confirming the necessity to conduct deeper analyses on this contribution. Although the propeller jet sediment transport processes are coupled, these modelling efforts are still incomplete since they do not take into account the impacts of the propeller-induced momentum in the hydrodynamic computation. As a result, the sediment’s resuspension in the water column is due to ambient currents only, which present less sediment advection and dispersion than the actual propeller-induced flow field.
Recently, due to the ever-increasing computational efficiency of computers, computational fluid dynamics (CFD) have gained more traction in studying complex fluid dynamics problems. However, the application of CFD models is on a case-by-case basis, and it is recommended that the appropriate solver be chosen according to the problem to be investigated [
5]. Regarding the scour induced by the propeller wash, the CFD Ansys Fluent and OpenFOAM software packages have been recently applied by researchers, the former for determining the velocities and the turbulence within the wash [
6], the latter for predicting the scour depth and extent [
7]. In both cases, the numerical results were in good agreement with the experimental tests and presented reduced computational costs. Srse et al. [
8] numerically investigated the impact of sea traffic on the port of Koper in Slovenia, utilizing the hydrodynamic (HD) and mud transport (MT) modules of MIKE 3 FM. The dynamic ship data were first calculated using the Full Mission Bridge Simulator, and then the data were included in MIKE 3 FM. It was found that the propeller-induced jet reached velocities up to 1.5 m/s, and its intensity was affected by the propeller dimension, the revolution speed, the distance between the propeller and the bed level, and the type of ship manoeuvrer (departure or arrival). Craig et al. [
9] developed a numerical model to simulate the sediment transport processes induced by ship traffic. The numerical approach included a fully coupled hydrodynamic and sediment transport model, as well as propeller-induced effects. They calibrated their model against field data of measured flow velocities and erosion depths. It was found that the incorporation of the propeller effect in the numerical model led to better representation of the sediment resuspension. Moreover, the maximum scour was affected by the rotational speed of the propeller, the power of the ship engine, and the distance between the propeller and the bed level.
The present work aims to lay the foundations for the implementation of a new module for the prediction of the ship propeller-induced sediment transport processes and the resulting bed scour in the widespread open-source model FUNWAVE, which is a fully non-linear Boussinesq wave model [
10]. The specific model is a modified version of FUNWAVE, which is largely used in the literature to study sediment mobilization and transport by ships. The primary objective of the present work is to provide an additional propeller module to the FUNWAVE model in order to enable researchers to conduct an in-depth analysis of the hydro-morphodynamic phenomena occurring in port environments. Thus, it will be possible to account for wave and ship interactions, simulate multiple vessels, and evaluate propeller momentum effects on sediment transport and resuspension processes and the morphological evolution of the seabed with satisfactory accuracy and acceptable computational cost.
The rest of the paper is structured as follows. A description of the implementation of new formulae for the effect of the ship propeller is provided in
Section 2, as well as an overview of the numerical setup. The most important results, which provide fundamental data for the investigation, are given in
Section 3 and discussed in
Section 4. Conclusions are finally provided in
Section 5.
2. Materials and Methods
The main objective of the present work is to present the importance of including the impact of the propeller jet in the calculations of ship-induced sediment mobilization and transport, as well as the corresponding seabed morphological evolution. This is achieved by the implementation of a proper formulation for the propeller jet, applied to the vessel and sediment modules of FUNWAVE. Moreover, the effect of the propeller on the hydro-morphodynamics is presented and discussed.
The FUNWAVE model was initially developed by Kirby et al. [
11] based on Wei et al. [
12]. Recently, in 2012, Shi et al. [
10] presented the FUNWAVE-TVD version, the total variation diminishing (TVD) version of the fully non-linear Boussinesq wave model. The development of the present version was due to the need for modeling surf zone-scale flow processes in a Boussinesq model framework and modelling Tsunami waves on both a global/coastal scale for prediction of coastal inundation and a basin scale for wave propagation. This version provides many theoretical and numerical improvements, including a more complete set of fully non-linear Boussinesq equations (citation), the Monotonic Upwind Scheme for Conservation Laws (MUSCL)-TVD solver with adaptive Runge–Kutta time stepping, the shock-capturing wave breaking scheme, Lagrangian tracking, and the option for parallel computation.
The effect of the propeller is modelled as an additional velocity distribution on the seabed, where the propeller is ideally located at the stern of the ship. The following subsections describe all steps of the numerical approach.
- Step 1:
Definition of the ship and propeller characteristics
In FUNWAVE, ship wakes and waves are modelled as a pressure source. In particular, according to the shape of the vessel, it is possible to choose between four types of pressure source functions. Currently, the ship propeller effect in FUNWAVE is implemented only for the first type of source function, which imitates pressure disturbance. The interested reader can refer to the FUNWAVE documentation for a more detailed description [
10].
Through an input file related to the vessel, it is possible to provide the ship’s characteristics, such as the location, the heading, the speed of the vessel, and the vessel’s length L, width B, and draught P. Moreover, the type of pressure function and the shape parameters are specified, which provide the submerged volume of the vessel. The propeller characteristics are added in the input file, specifying the propeller diameter , the revolution speed n, the dimensionless thrust coefficient (parameter expressing the efficiency of the propeller in converting power into thrust), and the bed clearance , which is the distance between the propeller axis and the seabed.
- Step 2:
Computation of the efflux velocity and the propeller-induced near-bed velocity
The prediction of the velocity field behind a propeller is essentially based on the magnitude of the efflux velocity,
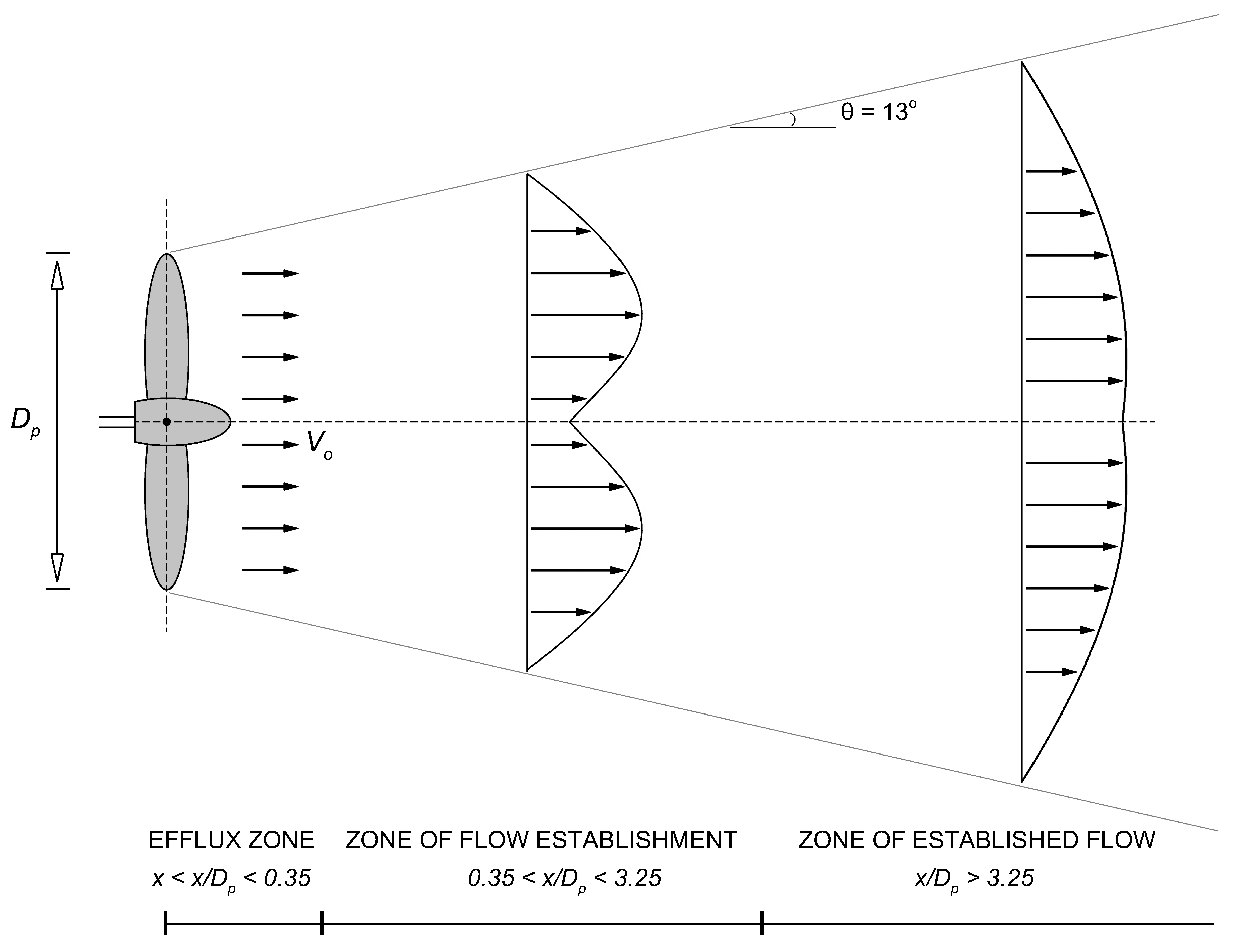
, defined as the maximum axial velocity at the face of the propeller. From the efflux velocity, it is possible to evaluate the velocity in different sections. The literature [
13,
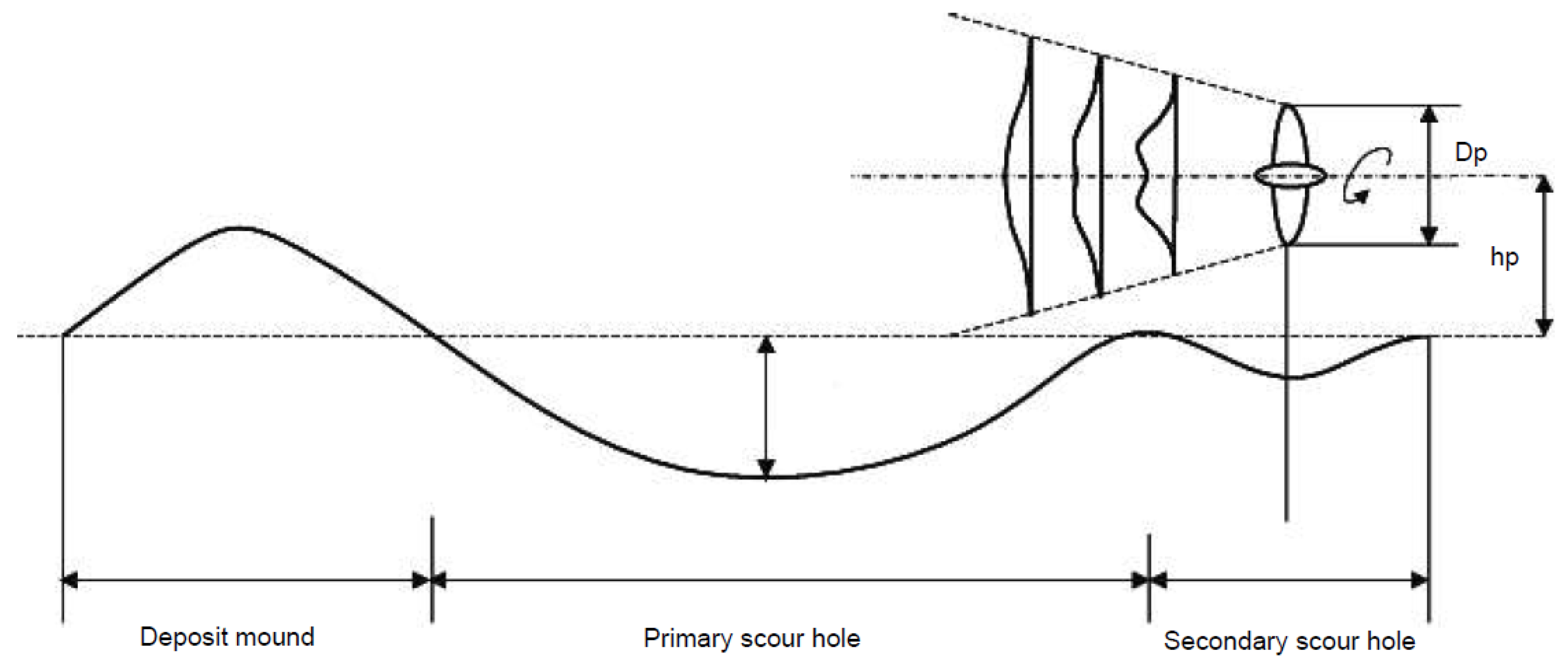
14] suggests that for a propeller-free jet, where the diffusion is not bounded, the flow region behind the propeller can be conventionally divided into three distinct zones: the efflux zone, the zone of flow establishment (ZFE), and a zone of established flow (ZEF), as presented in
Figure 1.
Each of these zones is characterized by different expressions of the axial velocity. The efflux zone is the area closest to the propeller, where the axial velocity reaches a maximum value equal to the efflux velocity. All the other values are derived from this maximum value in relation to the distance from the propeller. The ZFE, where the jet is generated and becomes established, is such that the axisymmetric velocity is lower at the central axis due to the presence of the propeller hub [
13]. Moving away from the central axis (like for a wake), the influence of the propeller hub decreases, resulting in an increase in the axial velocity, which reaches a maximum value at a radial distance of
, where
and
are, respectively, the radius of the propeller and the radius of the propeller hub [
15]. At a larger radial distance, the velocity tends to decrease, presenting a double-peaked distribution. In the ZEF, the lateral trend of the axial velocity at a cross-section follows a Gaussian normal distribution [
14] with maximum values at the rotational axis. Then, like in typical free jets [
16], it decays linearly with the distance x from the efflux plane.
In this model, the efflux velocity is first computed according to the Equation proposed by Fuehrer and Römisch [
17]:
Therefore, given the efflux velocity, both the longitudinal and transversal components of the axial velocity at the seabed level can be computed according to the following new Equation proposed in this work for the propeller-induced velocity field the on the seabed:
where
x and
y are, respectively, the distances in the longitudinal and transversal directions from the propeller, which is located at the stern of the vessel and
is a model constant equal to 0.17 for ducted and 0.19 for non-ducted propellers [
18]. Such values of
depend on the presence of a non-rotating nozzle. In the case of ducted propellers, the propeller is housed within a cylindrical or elliptical duct. This design contributes to an improvement in the propeller efficiency by reducing tip vortex losses and increasing the thrust at lower speeds. To the best of the authors’ knowledge, the present study is one of the earliest and few to be specifically devoted to investigating and implementing the propeller-induced velocity field directly on the seabed.
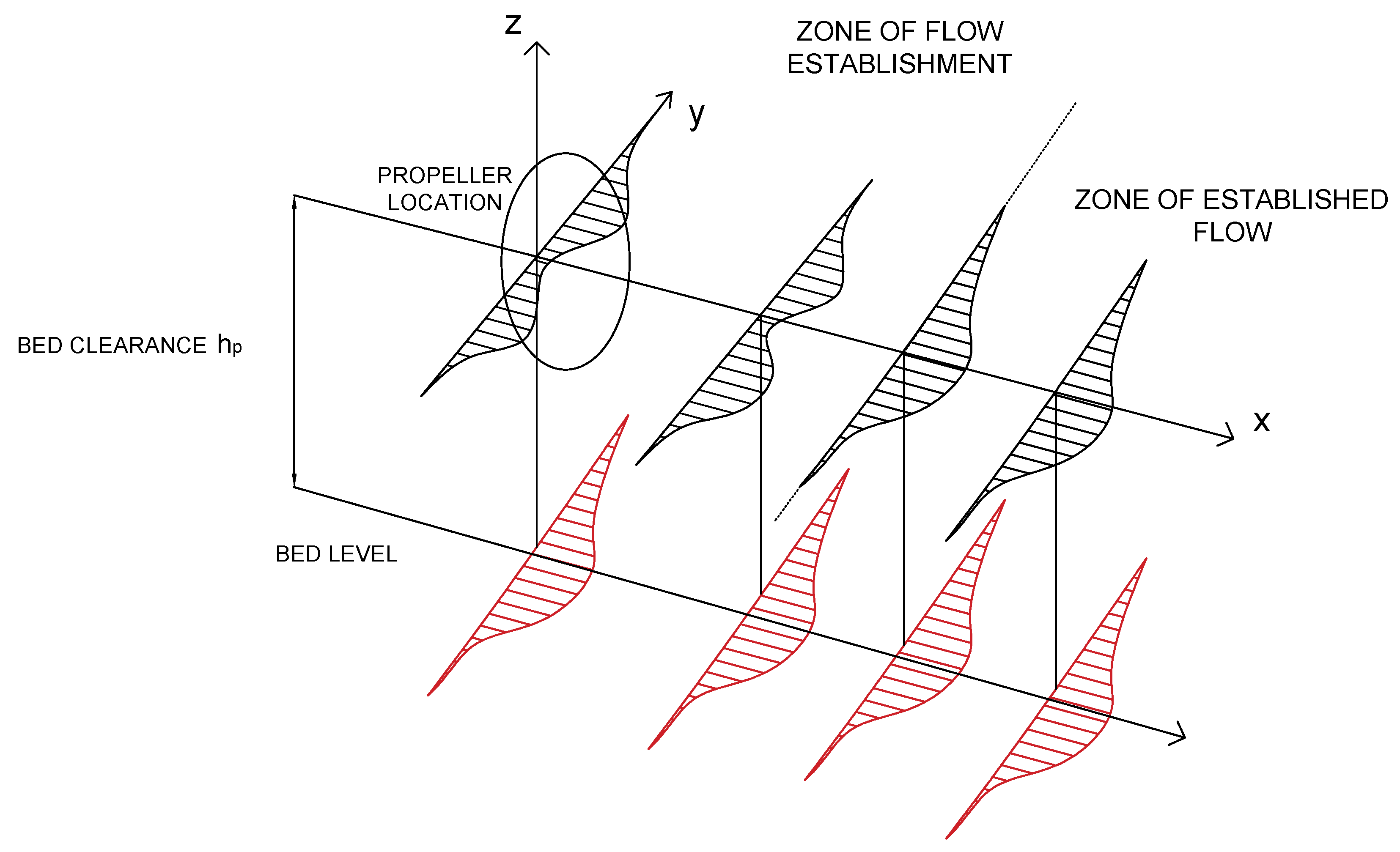
Since FUNWAVE is a depth-averaged numerical model, the present approach aims to evaluate the propeller-induced velocity field only at the bed level by projecting on the bed the typical propeller-induced velocity profile along the entire water column. A simplified three-dimensional (3D) sketch of the near-bed propeller-induced velocity distribution is provided in
Figure 2. The velocity profile behind the propeller jet and along the propeller axis is presented in black, while the propeller-induced velocity projected on the bed level is shown in red.
More precisely, Equation (
2) represents the near-bed velocity at a distance from the seabed equal to the Nikuradse roughness coefficient,
, where
is the median sediment diameter, which is also the case in the computation of the shear velocity in the sediment transport module of FUNWAVE [
10]. The formulation of the near-bed velocity in the ZFE, in Equation (
2), is partially derived from the Equation suggested by PIANC [
19], which is valid for a 3D model, and then adapted to the horizontally two-dimensional FUNWAVE model. Accordingly, the proposed near-bed velocity in the ZEF depends, at all locations, on the magnitude of the efflux velocity
. The term
plays a major role in the reduction in the efflux velocity. The near-bed velocity is inversely proportional to
x, which means that the propeller effect decreases with increasing distance. In the exponential term, the radial distance
r in the original formulation proposed in PIANC [
19] is substituted by the sum of
. This accounts for the dependence of the near-bed velocity on the distance from the propeller along the cross-flow direction (
y), and on the bed clearance (
), confirming that the smaller the distance from the propeller, the stronger the propeller effect on the near-bed velocity. Moreover, the closer the propeller is to the bed level, the higher its contribution is to the near-bed velocity field.
- Step 3:
Computation of the propeller-induced friction velocity
The calculated values of the propeller-induced velocity field on the seabed
are transferred from the vessel module to the sediment transport module, properly modified to take into account the propeller contribution. The sediment transport module of FUNWAVE is based on the quasi-steady flow assumption, and it is considered appropriate for predicting sediment transport in depth-limited regions like the swash zone and seabed–ship hull water region. Both suspended and bed load transport are computed for both cohesive and non-cohesive sediment fractions. The suspended sediment transport is obtained by solving a depth-averaged advection–diffusion equation for the sediment concentration (
3):
where
is the non-dimensional depth-averaged sediment concentration normalized by the sediment density,
is the total water depth, given by the sum of the still water depth
h and the water surface elevation
, and
is the horizontal sediment diffusion coefficient evaluated by the formulation proposed by Elder [
20], taken equal to
, where
is the shear velocity. The term
represents the flow rate per unit width. The horizontal velocity is expressed as follows: with
being the velocity at the reference level
and
being the depth-averaged
contribution. In addition, E represents the erosion rate, evaluated by van Rijn’s pickup function [
21]:
where
a represents the reference elevation, defined as a function of the total water depth (
),
is the settling velocity, and
is the dimensionless grain size:
with
s representing the specific gravity of the sediment, and
is the water kinematic viscosity. The bed shear stress,
, and the critical shear stress,
, are defined as follows:
where
is the critical Shields parameter, approximately equal to 0.05,
is the depth-averaged total velocity, and
is the water density.
In Equation (
3),
D represents the sediment deposition rate, calculated following Cao [
22]:
where
,
is the sediment porosity, and
is a constant equal to 2.0. The bed load sediment transport is calculated using the Meyer-Peter and Muller formulation [
23].
The morphological evolution of the bed is calculated by the morphological module on the basis of the sediment continuity equation using a time-averaged pickup and deposition rate:
In the previous equation,
represents the time-averaged depth changes with positive values for erosion and negative values for deposition,
and
are, respectively, the time-averaged pickup and deposition rates averaged over the morphological time step
, and
is the bed load flux vector averaged over the same time interval.
Regarding propeller implementation, the friction velocity due to the propeller rotation is computed as follows:
where
is a friction coefficient proposed by Maynord [
4].
Therefore, the total shear velocity is obtained using the principle of superposition. The propeller contribution calculated by Equation (
11) is added to the original shear velocity computed in the sediment transport module using Van Rijn’s formulation. Thus, the total shear velocity is expressed as follows:
where the first term of the right-hand side is the original shear velocity and the second term is the additional shear velocity from the propeller.
- Step 4:
Computation of the propeller-induced bed shear stress
The additional contribution to the bed shear stress due to the propeller effect is introduced in the definition of the total bed shear stress. As suggested by Blaauw and van de Kaa [
18], the propeller-induced bed shear stress is estimated, imposing that the mean bed shear stress is proportional to the square of the velocity at the bottom through the friction coefficient
. Subsequently, the new total bed shear stress is given as follows:
where the first term of the right-hand side is the original bed shear stress and the second term is the propeller-induced bed shear stress.
The main stages of the numerical implementation in the ship wake and sediment transport modules of FUNWAVE are summarized as follows: (1) computation of both longitudinal and transversal components (defined as vectors) of the axial velocity induced by the propeller for each single vessel (vessel module); (2) computation of the friction velocity induced by the ship’s propellers (vessel module); (3) coupling between the vessel and the sediment module through the definition of the new friction velocity, also including the contribution of the ship propeller (sediment transport module); (4) computation of the new bed shear stress, accounting for the ship propeller effect (sediment transport module). In the case of multiple vessels, the same procedure is adopted for each one.
Limitations and Improvements
The present numerical model is valid under the following assumptions, which can explain some discrepancies between the numerical results and experimental findings in the literature. First, since FUNWAVE is a depth-averaged numerical model, it is not fully capable of reproducing the 3D characteristics typically occurring during the scouring processes induced by ship propellers [
24].
Moreover, a number of simplifications have been made to model the effect of the propeller jet flow. Specifically, the choice of different equations for the estimation of the efflux velocity used in the model. The equation here, for instance, refers to a single propeller without a rudder or bow thruster and does not take into account the number of blades.
In addition, for a better representation of the propeller wash, the propeller contribution should be included in the hydrodynamic equations as an additional momentum flux at the propeller location. Finally, the model is not yet capable of reaching an equilibrium state since the hydrodynamics have not been coupled with the propeller effect, causing unrealistic erosion on the seabed. Therefore, further adjustments must be carried out to couple the hydrodynamic and propeller modules.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}