
Numerical Analysis of Dynamic Response in Large Caissons during Wet-towing after Cable Breakage




Abstract
1. Introduction
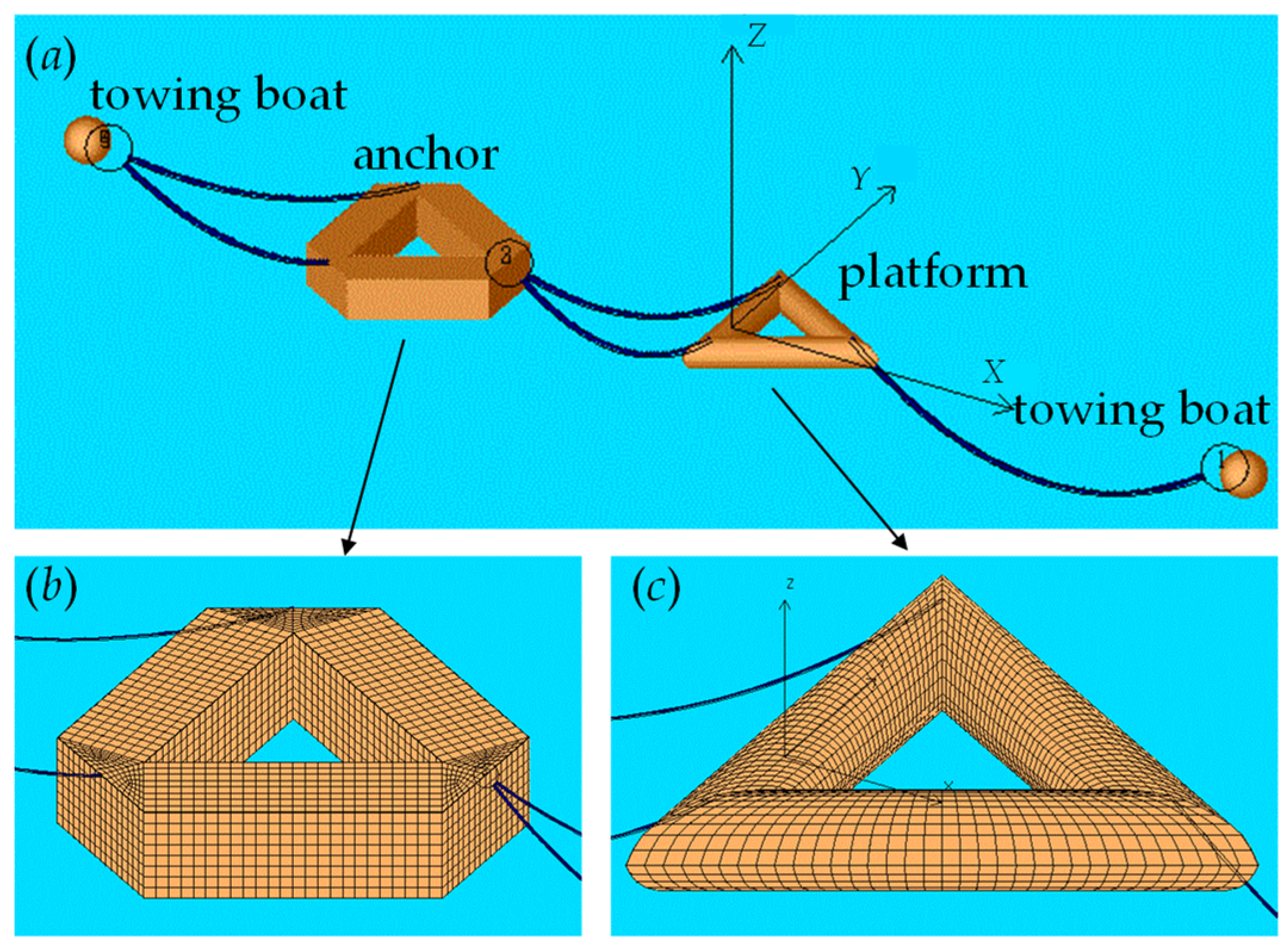
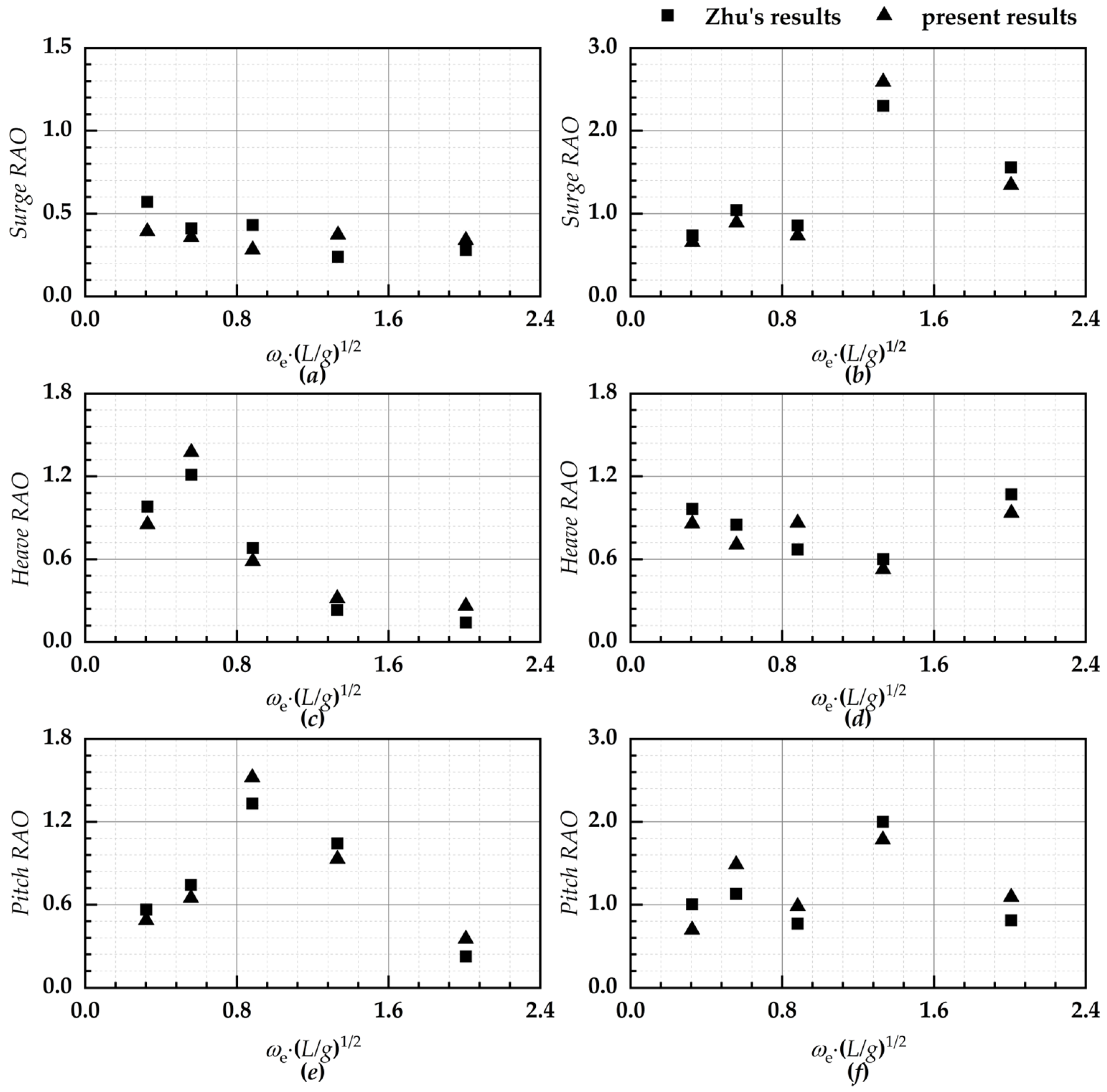
2. Numerical Methods and Verification
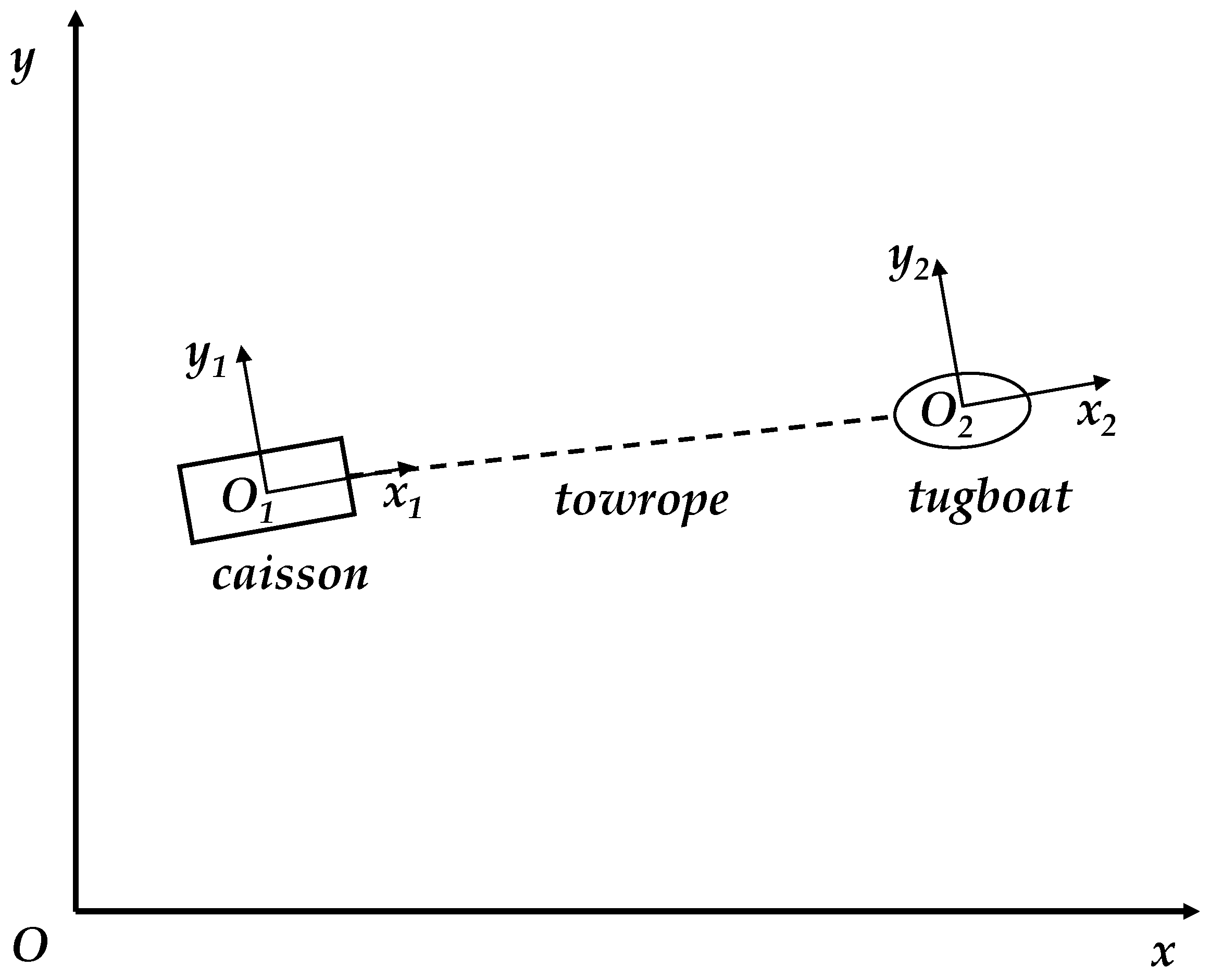
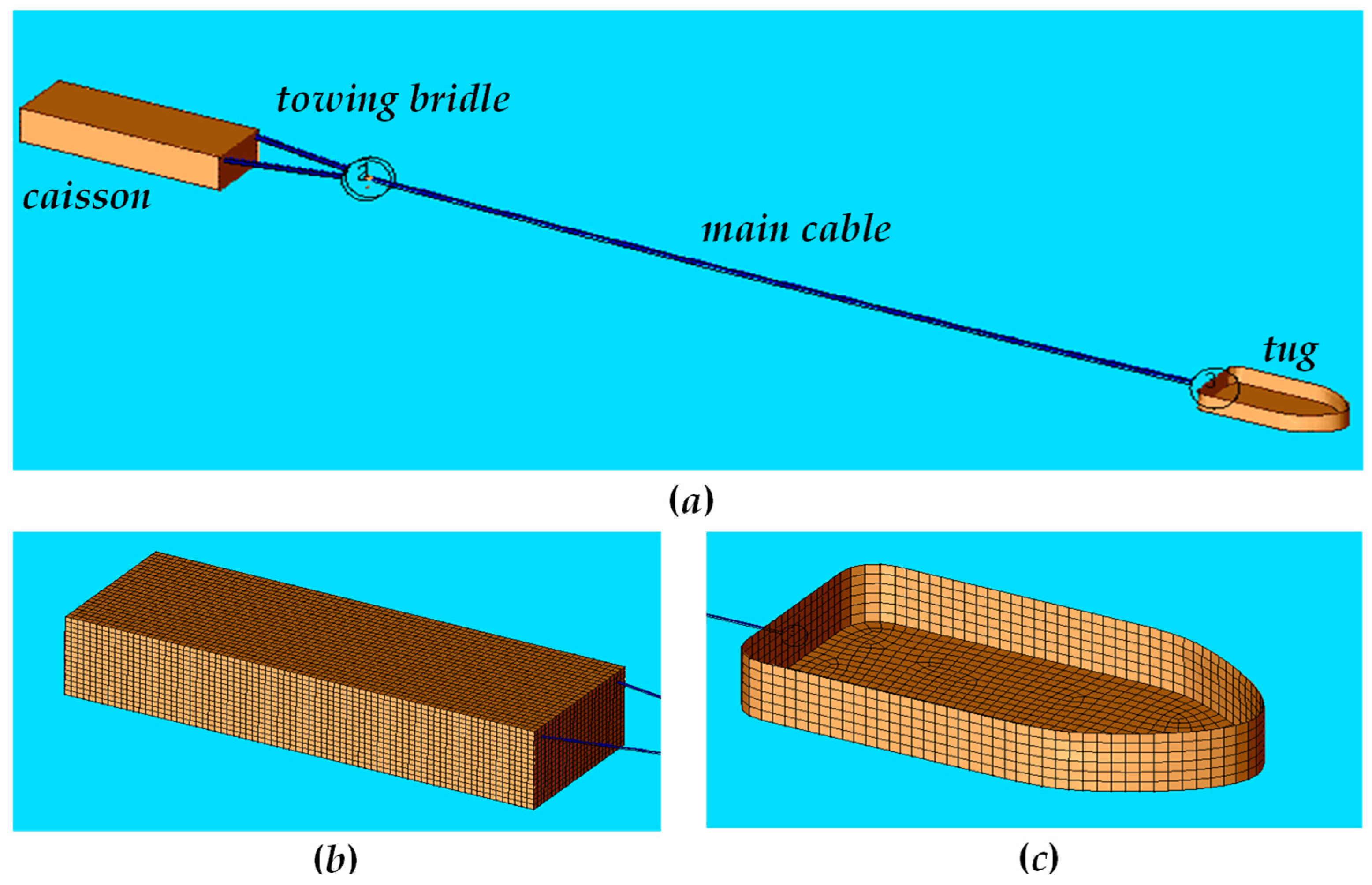
3. Numerical Model and Working Conditions
3.1. Caisson Model
3.2. Working Conditions
4. Numerical Results
4.1. Caisson’s Dynamic Responses after Towing Bridle Breakage
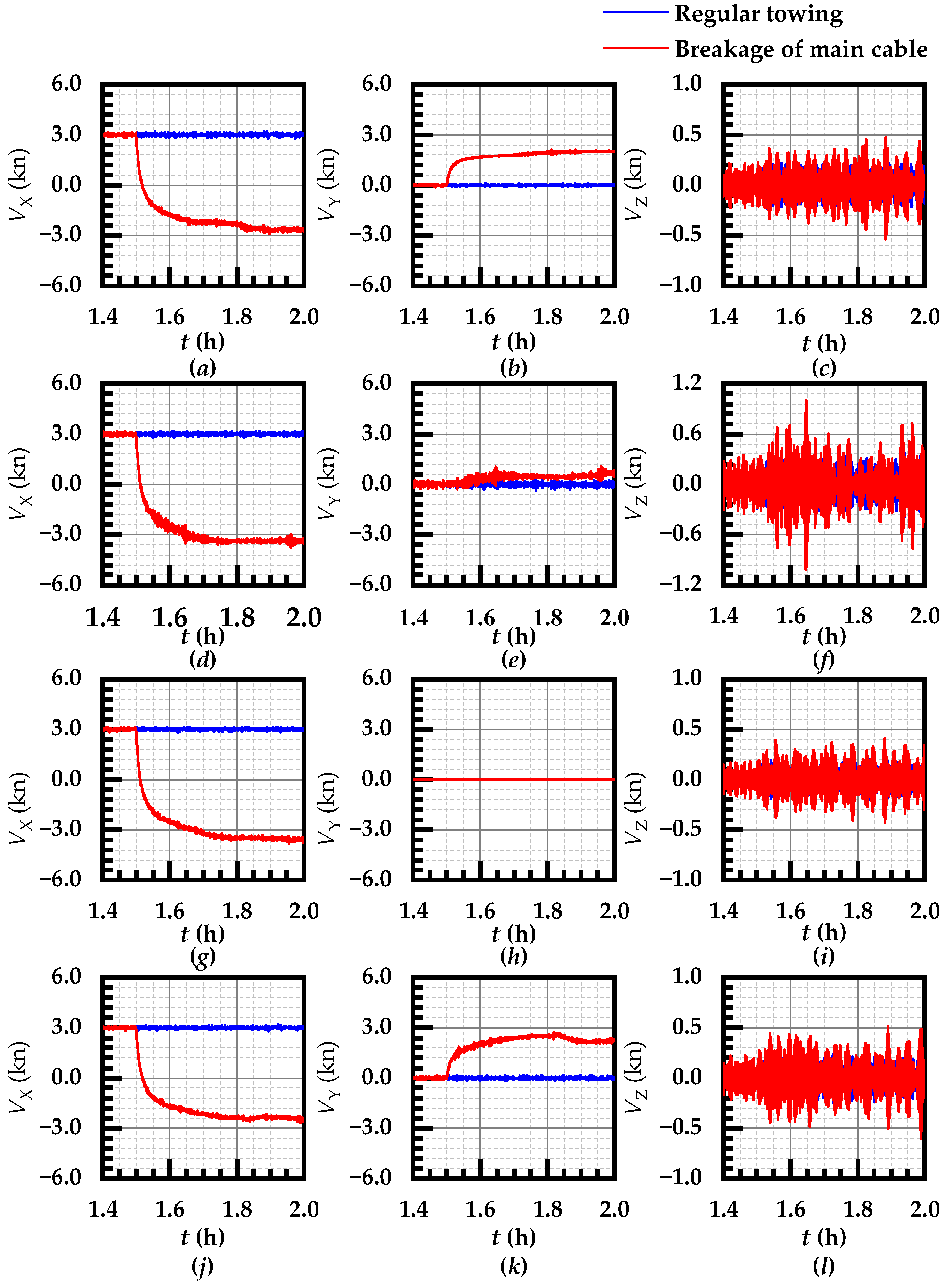
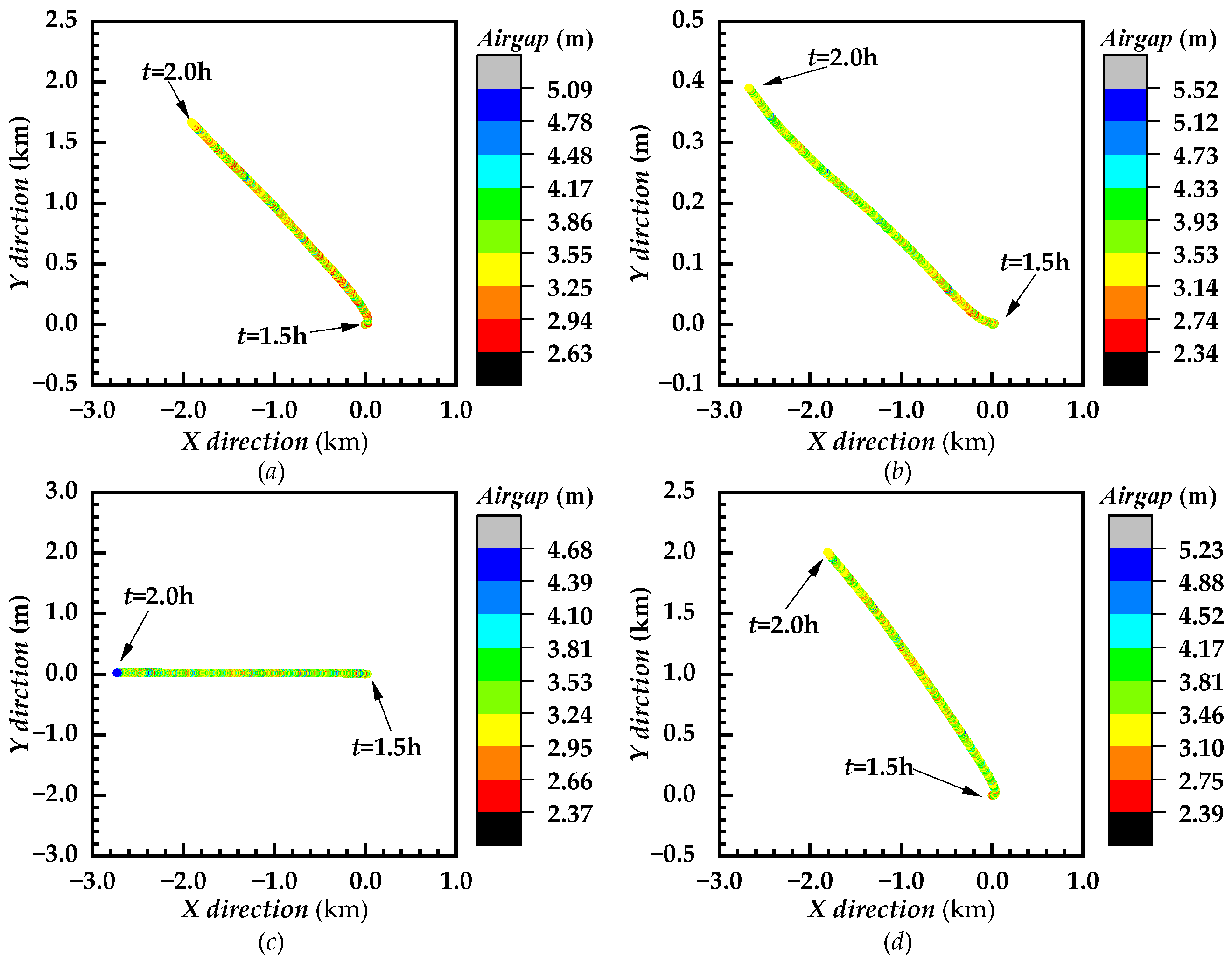
4.2. Caisson’s Dynamic Response after Breakage of Main Cable
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Symbols List | |
| total kinematic mass matrix of structure | |
| mass matrix of main body of structure | |
| additional mass matrix | |
| wave radiation damping matrix | |
| linear damping matrix | |
| hydrostatic stiffness matrix | |
| displacement vector | |
| excitation force | |
| wind force | |
| flow force | |
| wave force | |
| forces other than wind, wave, and current forces | |
| surge force on structure under effect of sea currents | |
| sway force on structure under effect of sea currents | |
| yawing moment on structure under effect of sea currents | |
| yawing moment coefficients on structure under effect of sea currents | |
| surge force coefficients on structure under effect of sea currents | |
| sway force coefficients on structure under effect of sea currents | |
| seawater density | |
| sea current speed relative to structure | |
| longitudinal projected areas of structure beneath still water | |
| surface | |
| lateral projected areas of structure beneath still water surface | |
| caisson length | |
| peak frequency | |
| peak enhancement factor | |
| constant value depending on peak frequency of wave spectrum and wind | |
| speed | |
| starting frequencies of irregular wave | |
| ending frequencies of irregular wave | |
| Acronym List | |
| STLPWT | submerged tension leg platform wind turbine |
| SFOWT | floating offshore wind turbine |
| JONSWAP | Joint North Sea Wave Project |
References
- The Transportation Safety Board of Canada. Marine Investigation Report M08M0010. Nova Scotia, Canada, 2008. Available online: https://www.tsb.gc.ca/eng/rapports-reports/marine/2008/m08m0010/m08m0010.html (accessed on 5 March 2024).
- Liu, X. Reasons for the High Frequency of Tugboat Accidents. China Ship Surv. 2015, 5, 72–74. (In Chinese) [Google Scholar]
- Park, H.H. A method for estimating the gear shape of a mid-water trawl. Ocean Eng. 2007, 34, 470–478. [Google Scholar] [CrossRef]
- Park, S.H.; Lee, S.J.; Lee, S. Experimental investigation of towing-and course-stability of a FPSO towed by a tug-boat with lateral motion. Int. J. Nav. Archit. Ocean Eng. 2021, 13, 12–23. [Google Scholar] [CrossRef]
- Park, C.W.; Seo, J.; Hyung Rhee, S. Model Tests of a Caisson in Wet Towing for Assessing Resistance and Stability in Calm Water and Waves. J. Offshore Mech. Arct. Eng. 2018, 140, 051301. [Google Scholar] [CrossRef]
- Lyu, W.; Ying, Z.; Wang, X.; Guo, H. Numerical Calculation of Water Resistance of Immersed Tube Element in Towing. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference, Honolulu, HI, USA, 16–21 June 2019. ISOPE-I-19-022. [Google Scholar]
- Strandhagen, A.; Schoenherr, K.E.; Kobayashi, F.M. The Dynamic Stability on Course of Towed Ship. SNAME 1950, 58, 32–66. [Google Scholar]
- Inoue, S.; Kakizaki, S.; Kasai, H.; Kubota, T.; Yamashita, Y. The Course Stability of Towed Boats. Trans. West JPN Soc. Nav. Archit. 1971, 42, 11–26. [Google Scholar]
- Inoue, S.; Lim, S.T. The Course Stability of Towed Boats (Continued). Trans. West JPN Soc. Nav. Archit. 1971, 43, 35–44. [Google Scholar]
- Inoue, S.; Lim, S.T. The Course Stability of Towed Boats-When the Mass of Tow Rope is Continued. Trans. West JPN Soc. Nav. Archit. 1972, 44, 129–140. [Google Scholar]
- Huang, Z.; Liu, C.; Kurniawan, A.; Tan, S.K.; Nah, E. Responses of a Floating Rectangular Caisson to Regular Waves. In Proceedings of the Asian and Pacific Coasts, Singapore, 13–16 October 2009. [Google Scholar]
- Huang, X.; Zhang, W.; Jiang, B.; Lv, Y. Experimental Study on the Offshore Positioning and Installing of Large Caisson. Appl. Mech. Mater. 2014, 580–583, 2129–2133. [Google Scholar] [CrossRef]
- Kotake, Y.; Oomukai, Y.; Matsumura, A.; Nakamura, T. A Study on the Behaviour of a Relatively Small Caisson Floating in Wave Fields and its Effective Installation Method. In Proceedings of the Coasts, Marine Structures and Breakwaters Conference: Realising the Potential, Liverpool, UK, 5–7 September 2017. [Google Scholar]
- Meneses, L.; Sarmiento, J.; Dolores, D.d.L.; Blanco, D.; Guanche, R.; Losada, J.; de Segovia, M.F.R.; Ruiz, M.J.; Martín, M.A.; Conde, M.J.; et al. Large Scale Physical Modelling for a Floating Concrete Caisson in Marine Works. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Madrid, Spain, 17–22 June 2018. V07AT06A025. [Google Scholar]
- Nakamura, T.; Mizutani, N. Development of Fluid-Sediment-Seabed Interaction Model and its Application. In Proceedings of the 34th International Conference on Coastal Engineering, Seoul, Republic of Korea, 15–20 September 2014. [Google Scholar]
- Heo, J.K.; Park, C.W. Time Domain Analysis on Deck Wetness of a Caisson Wet-Towed in Irregular Waves. J. Korean Soc. Coast. Ocean Eng. 2016, 28, 27–33. [Google Scholar] [CrossRef]
- Ding, H.; Han, Y.; Le, C.; Zhang, P. Dynamic Analysis of a Floating Wind Turbine in Wet Tows Based on Multi-Body Dynamics. J. Renew. Sustain. Energy 2017, 9, 033301. [Google Scholar] [CrossRef]
- Le, C.; Ren, J.; Wang, K.; Zhang, P.; Ding, H. Towing Performance of the Submerged Floating Offshore Wind Turbine under Different Wave Conditions. J. Mar. Sci. Eng. 2021, 9, 633. [Google Scholar] [CrossRef]
- Gu, H.; Wang, H.; Zhai, Q.; Feng, W.; Cao, J. Study on the Dynamic Responses of a Large Caisson during Wet-Towing Transportation. Water 2021, 13, 126. [Google Scholar] [CrossRef]
- Zhu, H.; Hu, C. A unified seakeeping and maneuvering analysis of multiple linked towing system with triangular Bodies. Ocean Eng. 2021, 222, 108577. [Google Scholar] [CrossRef]
- Zhao, Z.; Fan, Y.; Kuang, X.; Zhou, C. Model test on towing performance of deepwater FPSO. China Offshore Platf. 2018, 33, 84–88. (In Chinese) [Google Scholar]
- Zhang, P.; Peng, Y.; Ding, H.; Hu, R.; Shi, J. Numerical analysis of offshore integrated meteorological mast for wind farms during wet towing transportation. Ocean Eng. 2019, 188, 106271. [Google Scholar] [CrossRef]
- CCS. Guidelines for Towing at Sea; CCS: Beijing, China, 2011. [Google Scholar]
- DNVGL-OS-E301; DNV GL: Bærum, Norway, 2020.
- Ministry of Natural Resources South China Sea Bureau. Marine Disaster Bulletin of the South China Sea District; Ministry of Natural Resources South China Sea Bureau: Guangzhou, China, 2022. [Google Scholar]
- Huang, B.; Shi, X.; Xie, B. Study on the relationships of ocean wave periods in the South China Sea based on the observed data. J. Mar. Sci. 2016, 34, 6–10. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Value |
|---|---|
| Length/m | 66 |
| Width/m | 18 |
| Height/m | 15 |
| Initial draft/m | 12 |
| Center of gravity/m | (33.5, 9.0, 7.3) |
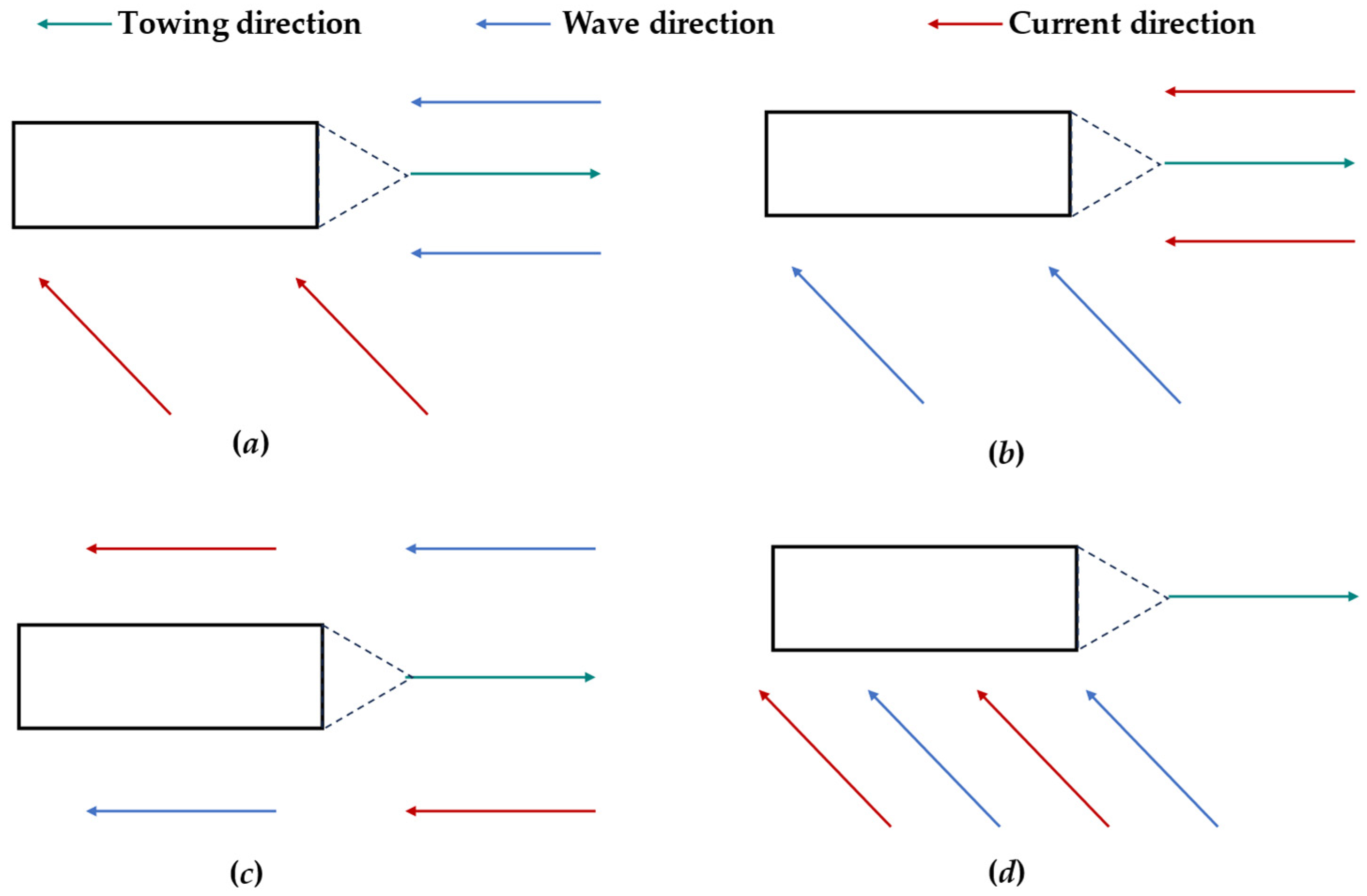
| Case | Towing Speed (kn) | Wave Direction (degree) | Wave Height (m) | Peak Period (s) | Current Direction (degree) | Current Speed (m/s) |
|---|---|---|---|---|---|---|
| TWD_180 | 3 | 180 | 1.25 | 7 | 135 | 1.5 |
| TWD_135 | 3 | 135 | 1.25 | 7 | 180 | 1.5 |
| TWS_180 | 3 | 180 | 1.25 | 7 | 180 | 1.5 |
| TWS_135 | 3 | 135 | 1.25 | 7 | 135 | 1.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, H.; Xu, Q.; Wang, H.; Feng, W. Numerical Analysis of Dynamic Response in Large Caissons during Wet-towing after Cable Breakage. Water 2024, 16, 1335. https://doi.org/10.3390/w16101335
Gu H, Xu Q, Wang H, Feng W. Numerical Analysis of Dynamic Response in Large Caissons during Wet-towing after Cable Breakage. Water. 2024; 16(10):1335. https://doi.org/10.3390/w16101335
Chicago/Turabian StyleGu, Haoyang, Qingyun Xu, Huakun Wang, and Weibing Feng. 2024. "Numerical Analysis of Dynamic Response in Large Caissons during Wet-towing after Cable Breakage" Water 16, no. 10: 1335. https://doi.org/10.3390/w16101335
APA StyleGu, H., Xu, Q., Wang, H., & Feng, W. (2024). Numerical Analysis of Dynamic Response in Large Caissons during Wet-towing after Cable Breakage. Water, 16(10), 1335. https://doi.org/10.3390/w16101335