1. Introduction
As the shipping industry continues to expand, navigational safety has become an increasingly prominent problem. According to statistics on 741 merchant ship accidents in Australia and 19,500 maritime accidents in the European Union, navigational accidents are mainly attributable to negligence in lookout or improper maneuvering [
1,
2]. In 2016, Rolls-Royce proposed the “Ship Intelligence” vision, which considered augmented reality and data fusion technologies to promote the development of navigational aid system for ships. In the same year, Jaeyong et al. proposed the AR-based advanced navigation aid system for ships, which displays the visual navigation aid information on the common screen [
3]. In April 2019, Mitsui O.S.K. Lines, Ltd., a Japanese transport company, installed a visual navigation aid system on 21 very large crude carriers (VLCCs) to support lookout and maneuvering in the course of navigation. In October 2019, Furuno Electric Co., Ltd., a Japanese electronics company, released a visual navigation aid system called “ENVISION”. In April 2020, South Korea’s Hyundai Heavy Industries mounted its advanced visual navigation aid system “HiNAS” on a bulk carrier [
4]. Consequently, maintaining situation awareness of mariners is critical for safe navigation, visual-aided information could provide such function by overlaying the physical world with digital content such as graphics [
5].
Okazaki et al. developed a route display system by registering the planned route in the onboard video. The pilot can also maintain environmental awareness at night [
6]. Nordby et al. presented a more detailed design idea for the information generation and display method and interactive interface of visual navigation aids [
7]. In their work, the displayable area in smart glasses was divided into five areas: sky, water antenna, mask, free movement and water surface, and corresponding information generation and display were performed, respectively. In the existing visual aid systems, the navigation information is mainly provided by traditional navigation equipment. System designs have focused on integrating various sources of information (e.g., planned routes and the target ship of the automatic identification system (AIS)) and videos. Procee et al. explored the higher level of visual-aided information [
8,
9]. In their work, a visual-aided collision avoidance system is developed, which proposed the concept of collision avoidance scheme visualization to enhance situational awareness and reduce collision risk by providing pilots with navigational information of route and speed combination. In 2021, Francesco et al. investigates the use of augmented reality technology in the field of maritime navigation, most work focus on the display of navigation equipment information such as compass, heading and position. In its data statistics, little of the literature involves visual rendering of ship motion simulation and prediction results [
10]. For intelligent ships, intelligent navigation units can plan routes dynamically, and control the ship to achieve autonomous collision avoidance and navigation. To visualize the execution effect of the planning, dynamic planning information must be combined with ship motion modeling and simulation. Thus, we can provide perceptual criteria for remote control, and thus improve the functionality of the visual navigation aid systems [
11]. Therefore, synthesizing ship motion via simulation effectively with visual navigation aids would significantly enhance the situational awareness of ship officer.
At the present stage, ship motion simulation mainly focuses on ship maneuvering and seakeeping, aiming to evaluate the ship performance at the design stage [
12]. The motion trajectories are primarily simulated through standard performance tests, such as turning circle and zigzag tests. To visualize the trajectory of intelligent navigation planning in the visual navigation aid systems, ship motion simulation must meet three requirements, First, the ship trajectory should be simulated accurately under the given control series and environmental information. Secondly, the simulation needs to consider time- and space-varying environmental factors such as wind, waves and currents. Thirdly, the time cost of simulation and calculation should be controlled, because the simulation trajectory is processed by the visualization unit of the visual navigation aid system. Nevertheless, insufficient attention has been paid to ship motion simulation methods for the specific task of computer-aided visual navigation because the research fields of computer vision and ship hydrodynamics overlap. Moreover, there is a lack of real-world ship navigation verification datasets containing integrated environmental information on wind, waves and currents.
Bendict et al. created a fast simulation tool for crew maneuver training, which provides inspiration to solve the high time cost of ship motion simulation in visual-aided navigation [
13]. In 2020, Qianfeng et al. applied a real sea area database to ship motion simulation [
14], and, on this basis, proposed a sensor-driven ship motion prediction approach for constructing a digital twin framework [
15], shedding light on simulation driven by dynamic data. However, the time consumption of the simulation method in their work was not discussed. Practical testing datasets with not only accuracy but real-time performance index need to be built for further validation and integration with visual-aided navigation system.
In this study, we present a dynamic data-driven method for ship motion simulation and construct a validation dataset using real ship navigation data. The validation results on this dataset show that the proposed method simulates routes rapidly and accurately for visual navigation aid systems and provides a suitable tool to reduce the cognitive load of the driving control personnel of an intelligent ship and enhance their capacity for situational awareness.
The main contributions of this paper are as follows: firstly, a ship motion simulation pipeline based on various databases is constructed, which is characterized by both accuracy and real-time operation and is especially suitable for visual-aided navigation. Secondly, this paper establishes a dataset and performance indexes to evaluate the pipeline, which provides a basis for further research on the integration of ship motion simulation and visual navigation aid systems.
2. Materials and Methods
2.1. Visual-Aided Navigation on the Water
In recently released visual-aided navigation systems such as Furono’s ENVISION, the display interface not only matches and fuses the AIS information of the target ship with the video information, but also registers the planned routes of the ship to the onboard video images, such that the driving control personnel can perceive the navigation situation stably.
In the existing visual navigation systems, the navigation information is mainly obtained from the traditional equipment of the ship bridge, such as electronic charts, radar, AIS, global positioning system (GPS) and compass. Using augmented reality, the above information is registered to the video images of the shipboard camera to realize a superimposition of virtual information and real images. On the intelligent ship, the intelligent navigation unit is capable of autonomous navigation, i.e., making avoidance decisions and planning routes according to the current situation.
At present, the planning results of intelligent navigation units are rarely integrated with visual navigation aid systems. The main problem is the lack of a ship motion simulation framework applicable to the above scenario. During intelligent navigation, route planning is executed continuously after a fixed time interval. Each phase of planning outputs a unique control series, depending on the changes of the current environment. This calls for a dynamic, data-driven ship motion simulation method designed to ensure the consistency between simulation and actual navigation by receiving dynamic control information and environmental information. Such a method would provide accurate and real-time simulation trajectory data for the visual navigation aid systems.
2.2. Dynamic, Data-Driven Simulation Method
In order to evaluate the ship performance at the design stage, the traditional ship motion simulation study focusses on common standard test schemes, such as turning circle test and zigzag test with a certain velocity and rudder angle. In these standard tests, the control series of the ship are generally fixed values; the simulation environment is generally still water, or only influenced by a single environmental factor, namely, wind and currents with fixed direction and velocity, and regular waves with fixed frequency and amplitude. However, it is very important to consider the comprehensive influence of wind, current and wave in time and space for ship motion simulation in the actual sea. Modern commercial navigation simulators can simulate the ships motion in different environments in real time, but few studies focus on the real-time performance of their simulation method. As mentioned above, visual navigation aids need to display long-distance motion simulation data in a shorter time, which means that the simulation method needs to develop from real-time operation to faster operation beyond real-time. Apart from imputing the dynamic control series, the changing hydrodynamics of the ship and environmental disturbances must be taken into account to simulate ship motions for visual navigation aid systems. For this purpose, we developed a method for dynamic, data-driven simulation based on the ship hydrodynamic database and the environmental database. Additionally, all the databases are integrated into a pipeline using online interpolation. The proposed method is described in detail in the following sections.
2.2.1. Ship Hydrodynamic Database
During actual navigation, the ship’s heading and velocity, and its relative relationship to the wind, waves and currents in the marine environment vary from moment to moment. The traditional maneuvering motion simulation usually assumes that the ship has a constant hydrodynamic coefficient. This assumption is rather reasonable, for turning circle test and zigzag test are generally carried out in still water and last a short time. When the ship sails amidst complex sea conditions, the changing hydrodynamic coefficient needs to be considered to simulate the ship’s motion response as close to the real value as possible.
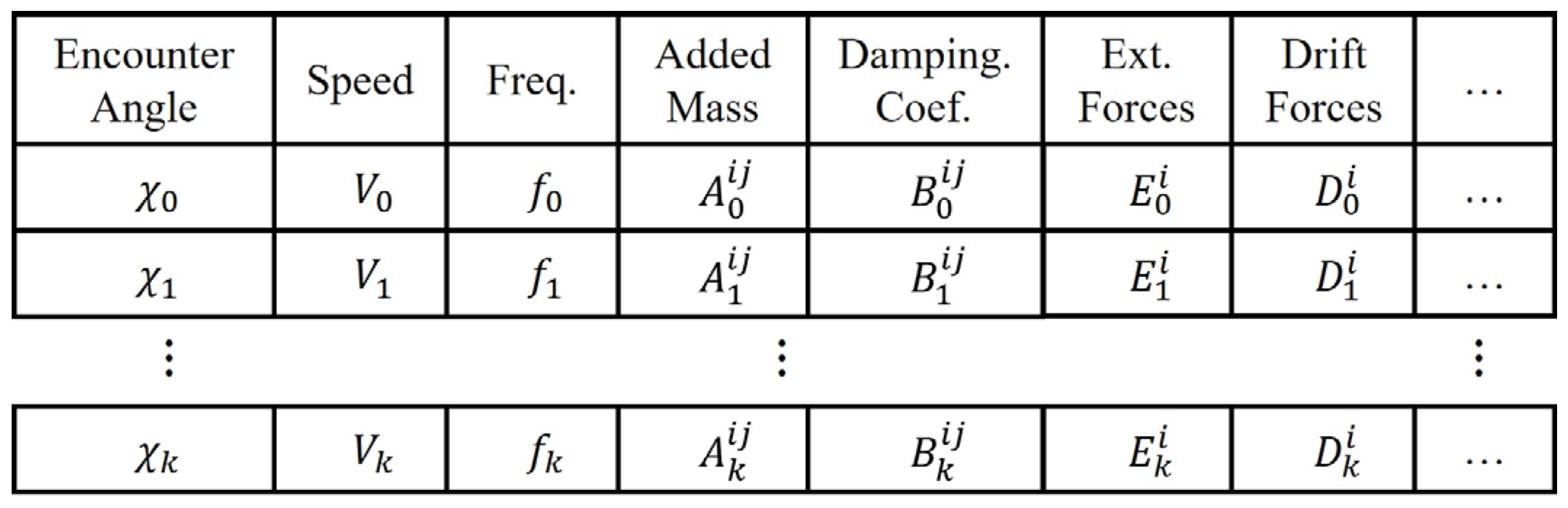
To obtain the real-time hydrodynamic coefficient in various sea condition, it is necessary to interpolate the coefficient according to the encounter angle, ship speed and wave frequency in the ship hydrodynamic database.
Figure 1 illustrates the structure of the ship hydrodynamic database. The key values used for indexing are encounter angle
, ship speed
and wave frequency
, and the data segments mainly include time-varying coefficients like the added mass matrixes
, damping coefficient matrixes
, wave excitation force vectors
and wave drift force vectors
. The superscript “
i” and “
j” indicate the six degrees of freedom of ship motion. In addition, the subscript “
k” represents the index number in the database. In the actual simulation, the coefficients at a certain ship state were obtained quickly using trilinear interpolation on the database, in light of the irregular waves and the ship motion state.
2.2.2. Environmental Database
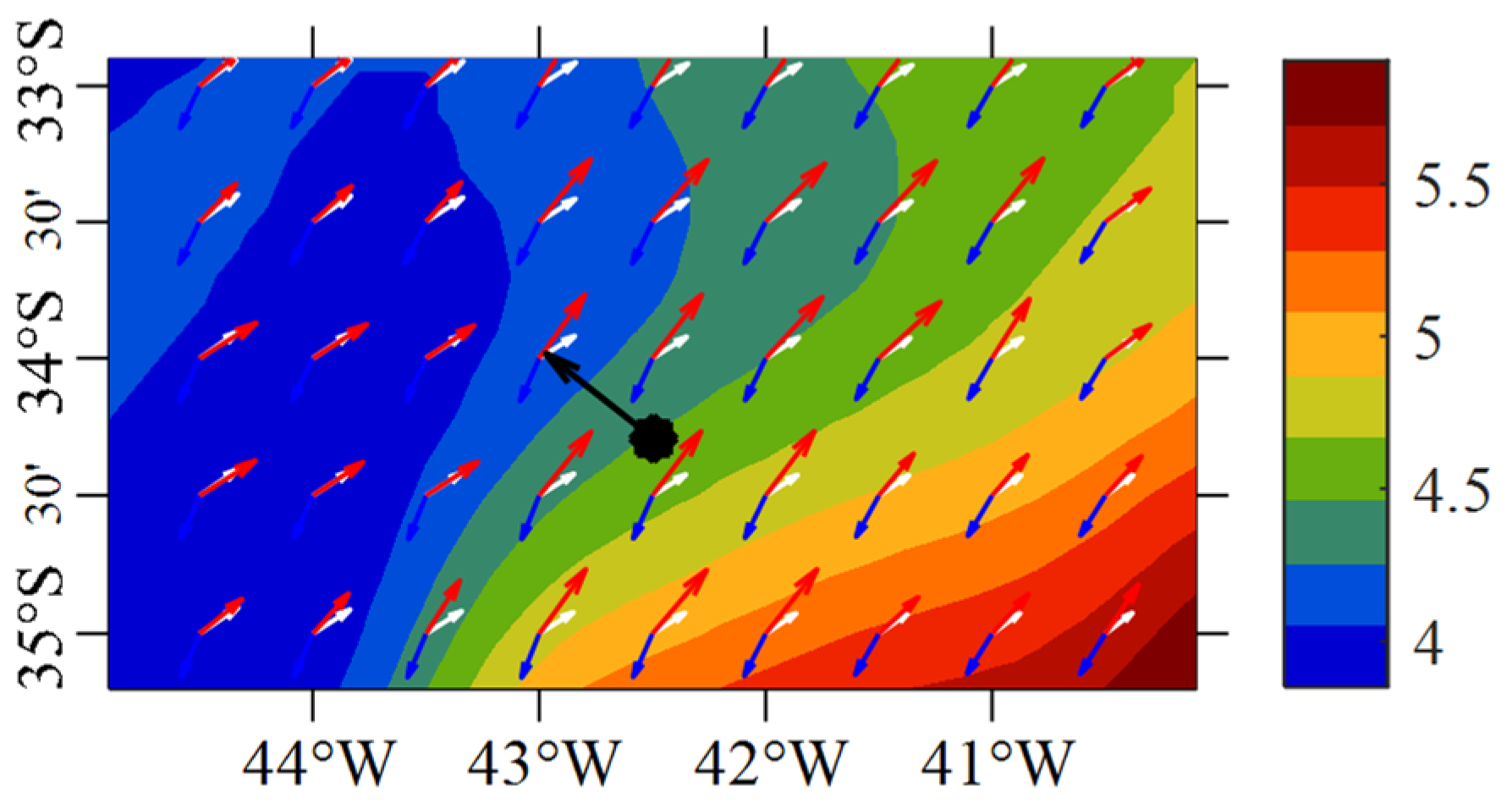
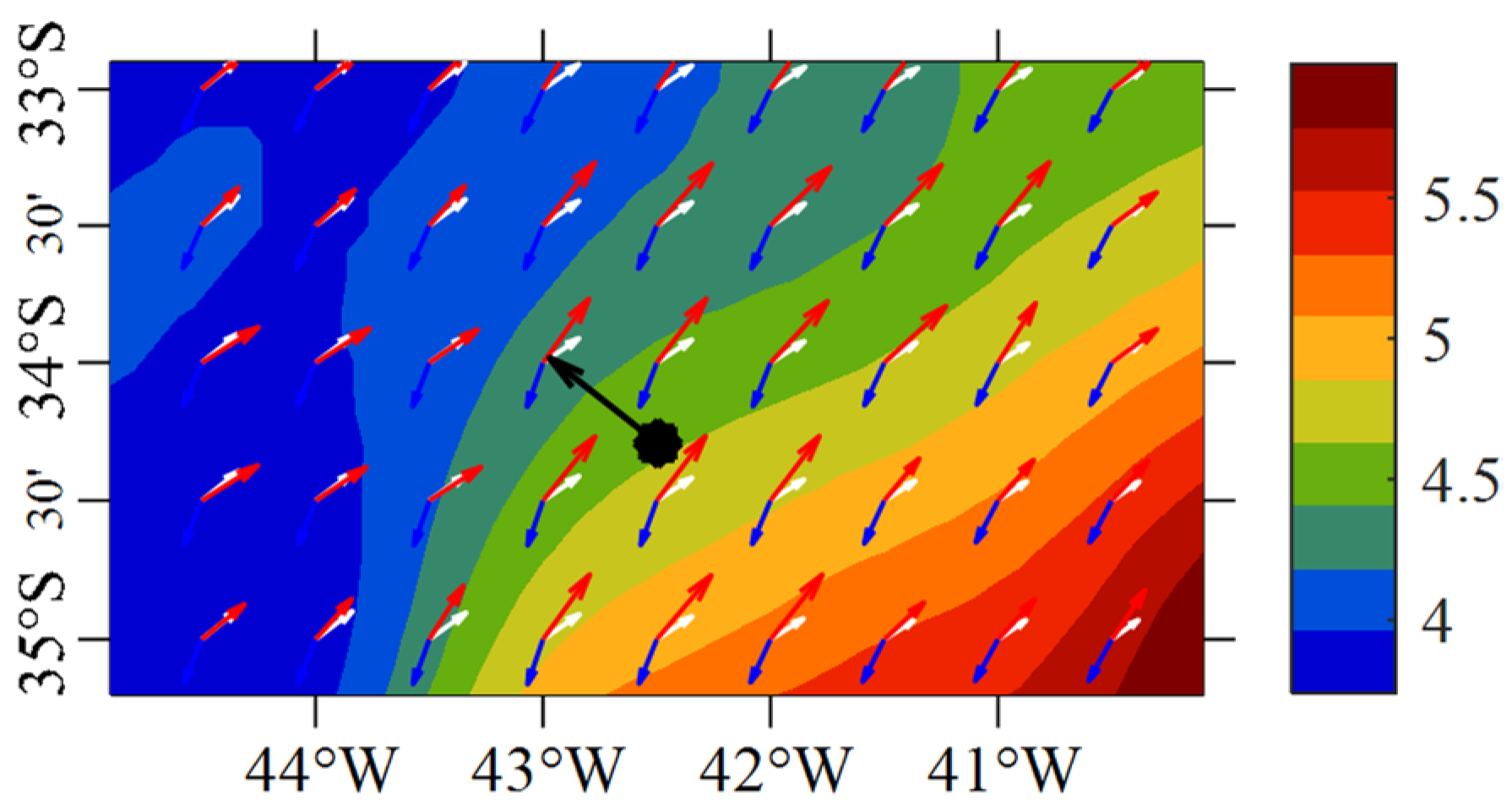
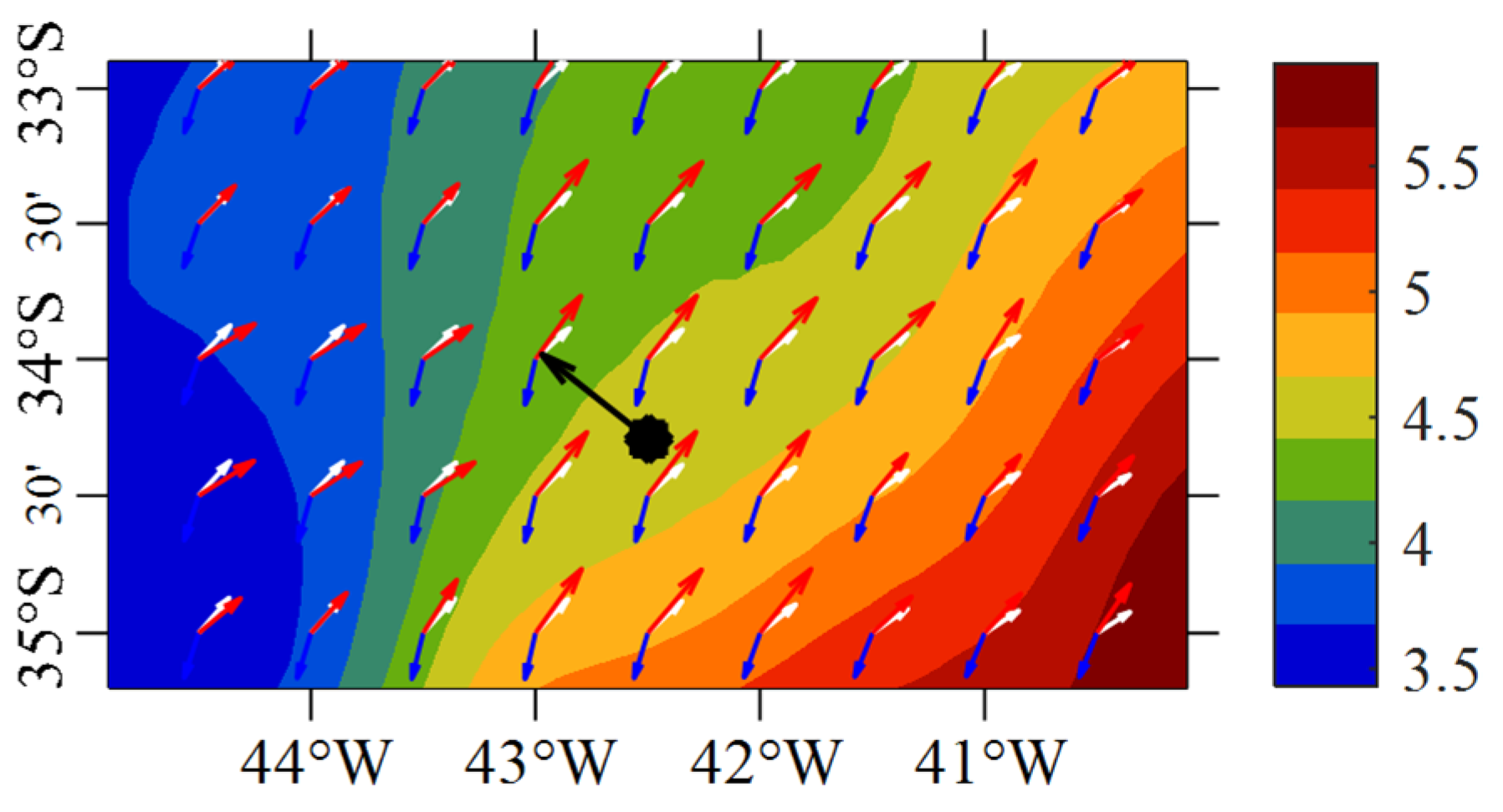
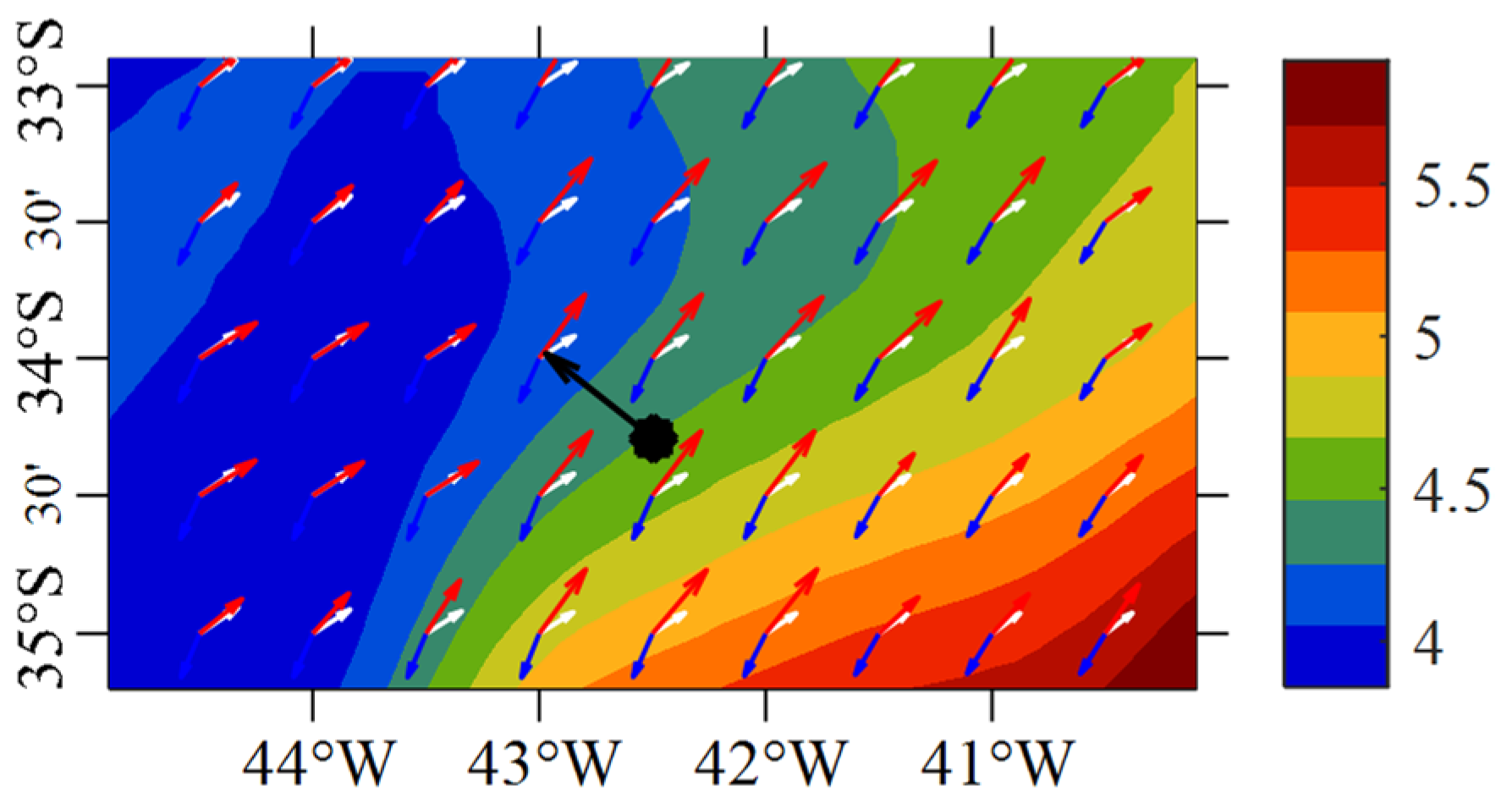
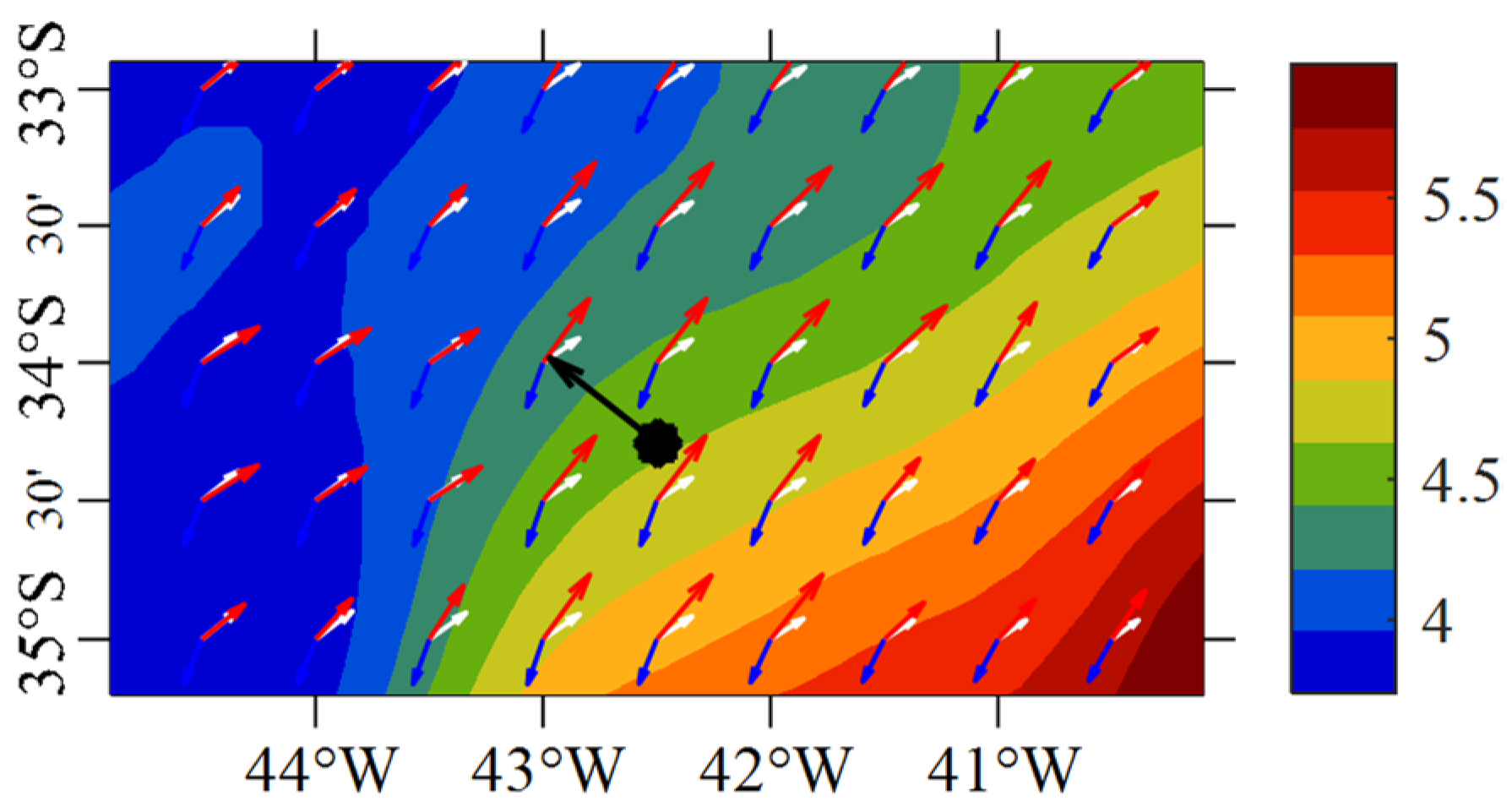
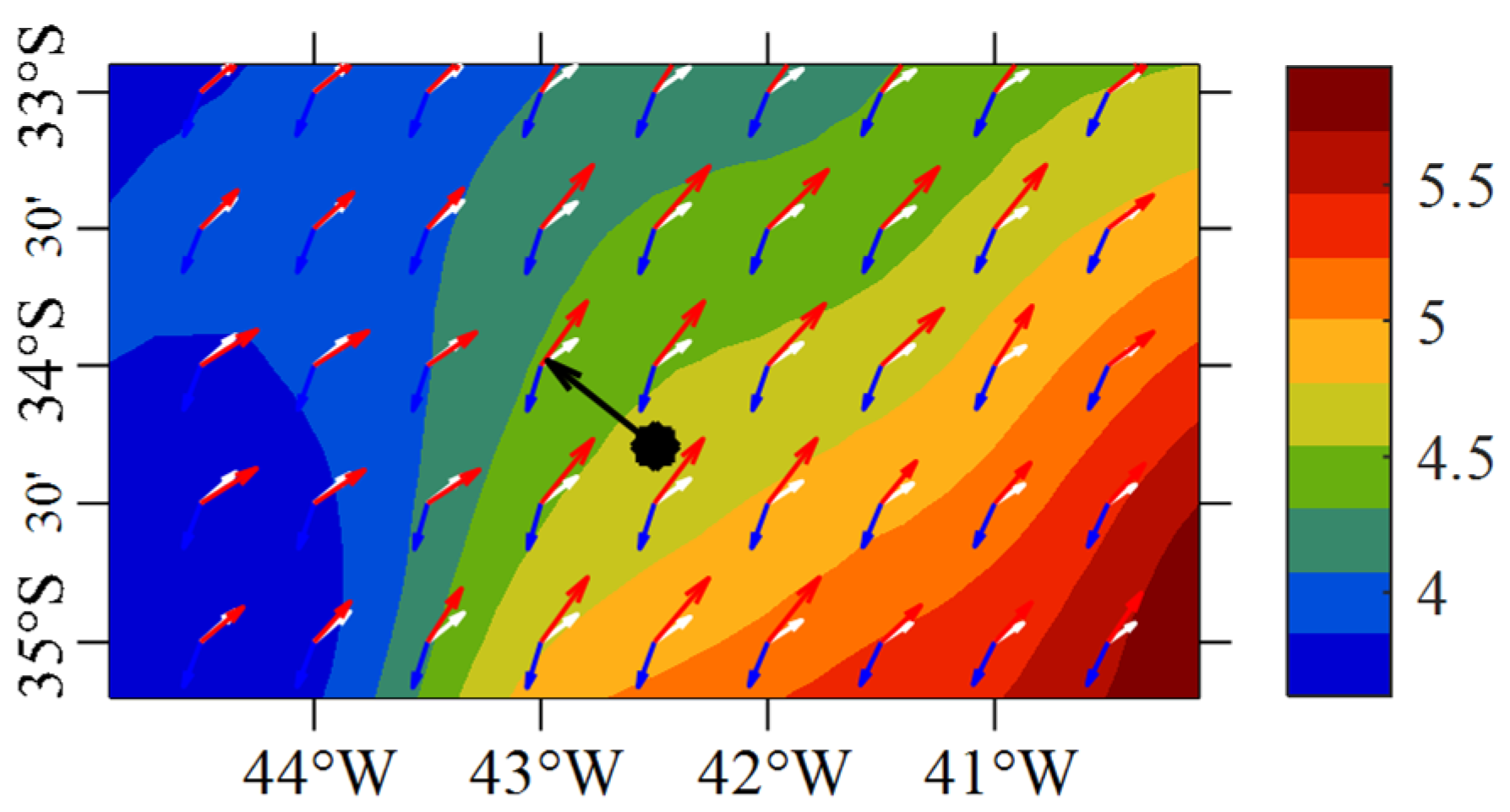
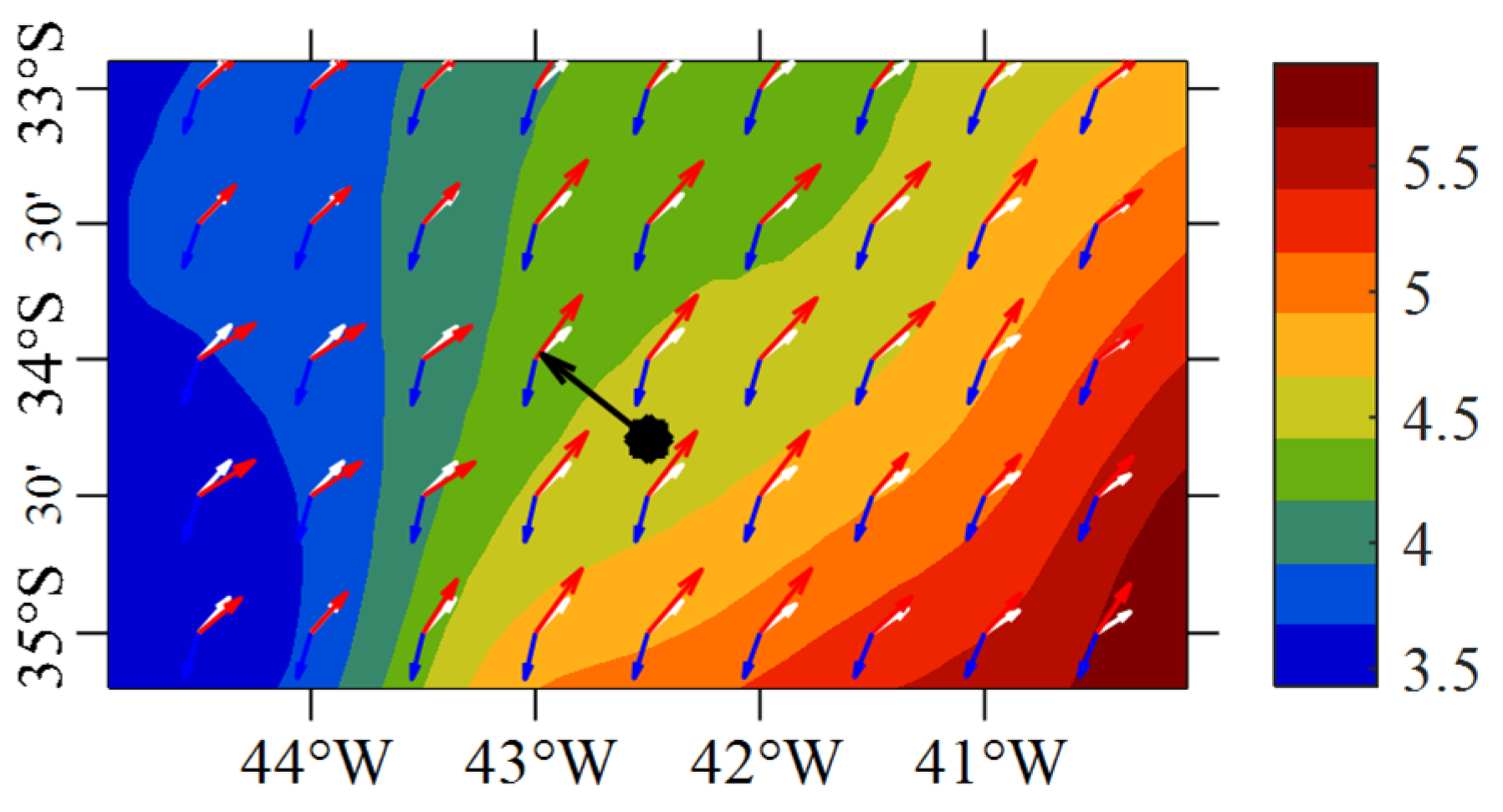
The marine environment is complex and constantly changing. The wind, currents and waves all vary with time and space. To approximate the real environmental disturbances in the simulation, the spatiotemporal variability of the environment must be considered to simulate ship motions in actual navigation [
14]. Historical observations can be imported to the ocean forecasting model to predict the environmental field for a future period [
15].
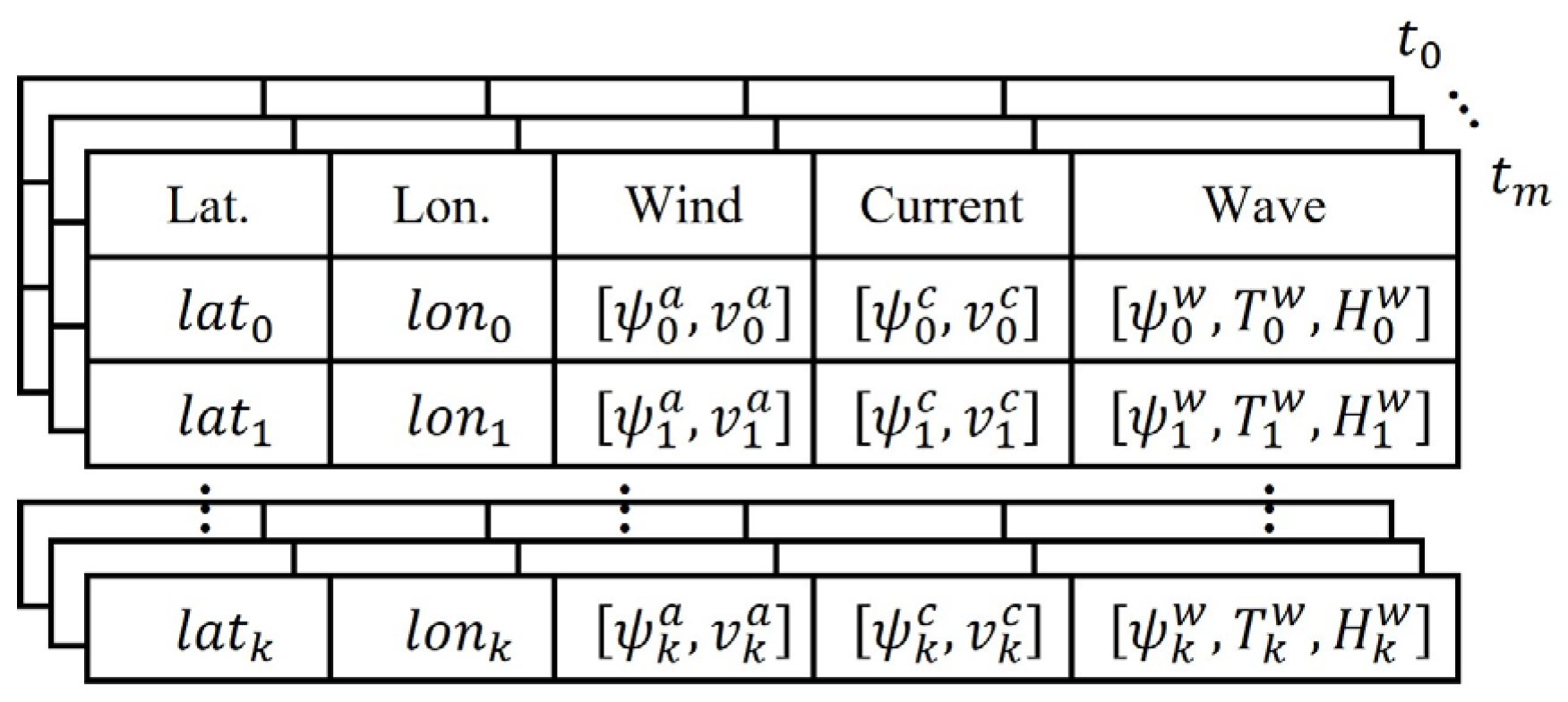
Given the high real-time requirement of visual-aided navigation, we obtained the dynamic information of environmental vectors from an offline environmental database. The structure of the environmental database is shown in
Figure 2, where the data at different moments
are arranged sequentially in sub-tables. In each sub-table, the keys used for indexing are latitude
and longitude
, and the data segments are wind, current and wave vectors, where
represent the wind direction and speed;
represent the current direction and speed;
represent the wave direction, wave period and wave height, respectively. During the simulation, trilinear interpolation with latitude, longitude and time was performed on the environmental database, according to the time and ship position. The interpolation yields the wind direction, wind speed, current direction, current speed, wave direction, wave period and wave height of the corresponding time and space. Next, the dynamic environmental vectors were imported to calculate the environmental disturbances of the ship.
2.2.3. Dynamic, Data-Driven Simulation Pipeline
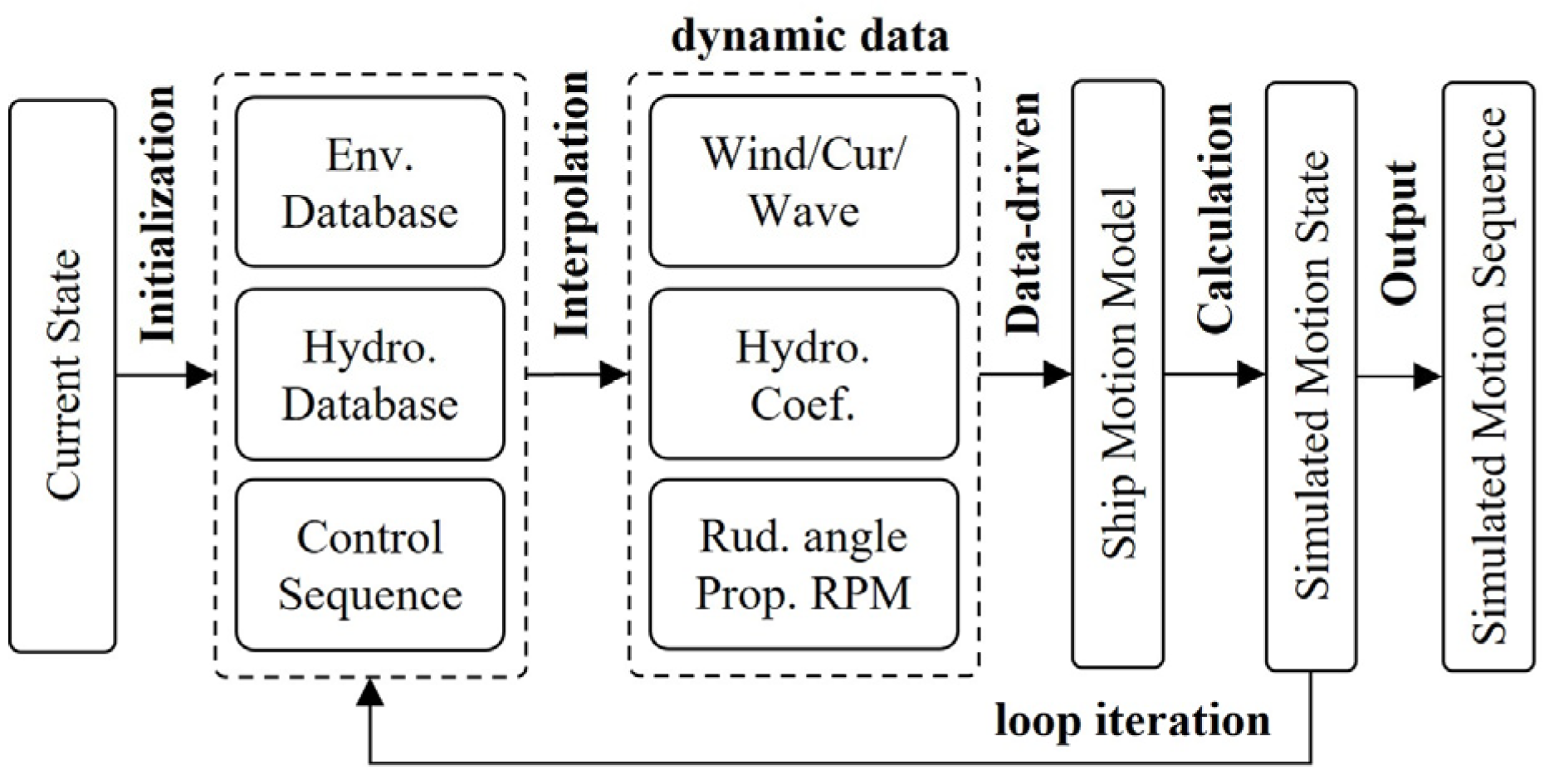
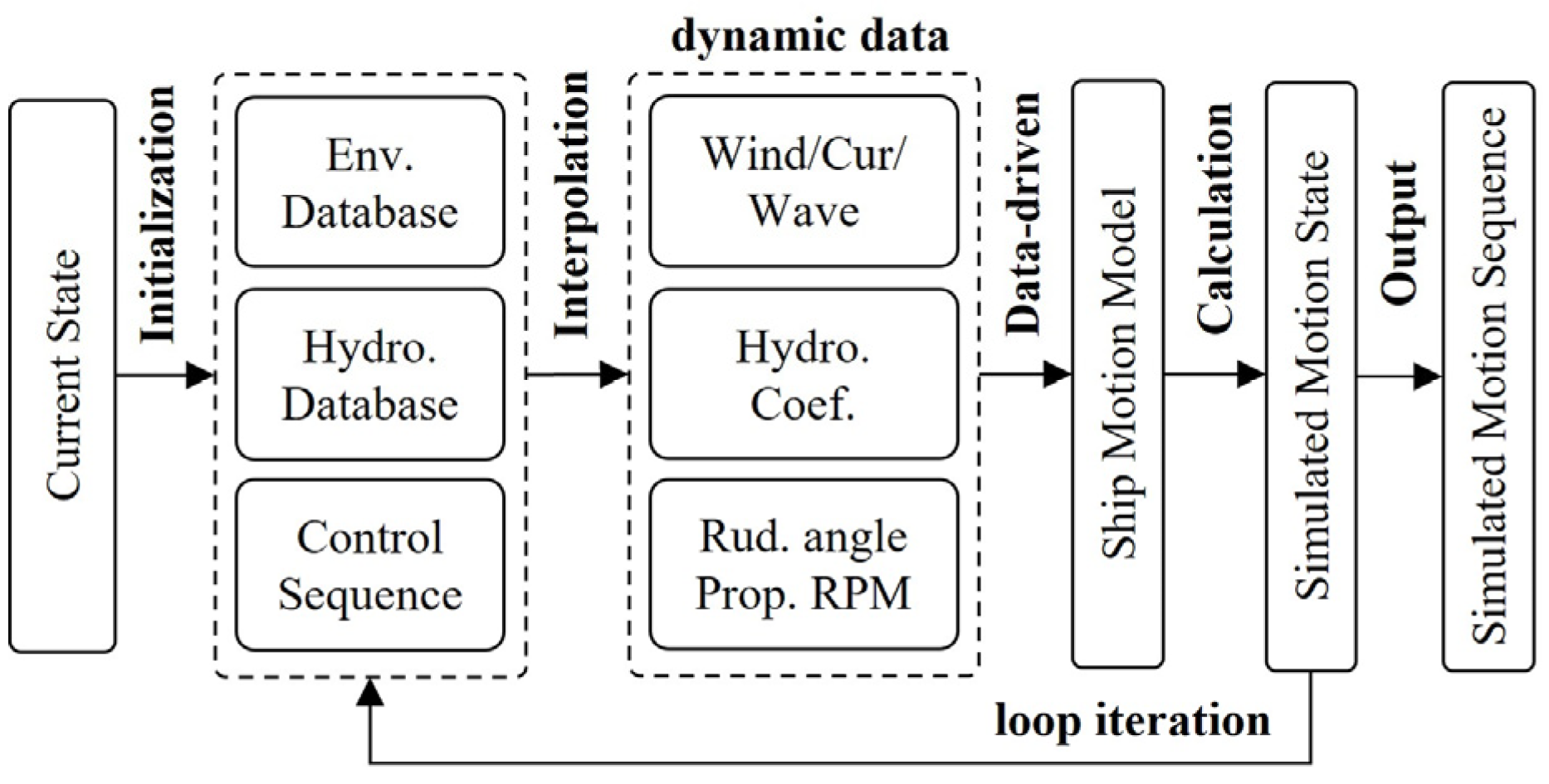
Based on the ship hydrodynamic database and the environmental database, this paper sets up a dynamic data driven simulation pipeline, as shown in
Figure 3. Take the superimposition of simulated motion trajectories in visual-aided navigation as an example. During one simulation, the pipeline is initialized by the information includes the current ship motion state (attitude, velocity and position) of the ship, and the wind, current and wave vectors are derived from the environmental database through interpolation of time and ship position. Subsequently, hydrodynamic coefficients are obtained from the hydrodynamic database through interpolation of wind, current and wave vectors according to the motion state of the ship. Additionally, the current rudder angle and propeller rate is extracted from the control series planned by the intelligent navigation unit. Next, the above dynamic data are input into the ship motion model to drive the solving process, producing the motion state at the next time step. The above steps are repeated cyclically until all the data in the control series are calculated. In the end, the simulated motion series is output to the visual-aided navigation unit, where the simulated routes are merged with the video for display.
In this pipeline, the most important parts are the offline databases. On one hand, the online simulation can achieve real-time performance benefits from the interpolation of the offline databases. The interpolation employed in this pipeline is linear method, which can keep the time consumption at a low level. On the other hand, the databases are carefully designed. The databases are developed based on light-weight local database SQLite, and the primary keys of databases are converted from physical values to integer numbers, which attempts to reduce the time of database indexing as much as possible. Consequently, this simulation method can achieve superior real-time performance by using the above techniques.
In the above pipeline, different modules are decoupled from each other and interact only at the data level, and the ship motion model is a replaceable unit. To simulate ship motion trajectories quickly, this paper adopts a four degrees of freedom (4-DoF) model considering environmental disturbances, as shown in Equation (1). This model was developed by adding dynamic data to the practical model proposed by Yasukawa et al. [
16]. Where
m is the ship mass,
is the longitudinal position of the center of gravity,
represents the added mass,
indicate the moment of inertia,
represents the added moment of inertia. Additionally,
u,
,
r, and
p represent the surge, sway, yaw and roll speed, respectively. In Equation (2),
X,
Y,
N and
K are the combined forces/moments of the surge, sway, yaw and roll motion, respectively, while the subscripts
H,
R,
P,
a,
c and
w are the forces/moments of hull hydrodynamic force, rudder, propeller, wind, currents and waves acting on the ship, respectively. Among them, the coefficients used to calculate the hull hydrodynamic force are from the hydrodynamic database, the environmental vectors used to calculate the wind, current and wave disturbance forces are from the environmental database, and the rudder angle and propeller rate used to calculate rudder and propeller control forces are from the control series. For detailed calculation method of the terms in Equations (1) and (2), please refer to the literature [
17].
2.3. Validation Datasets
Dataset Structure
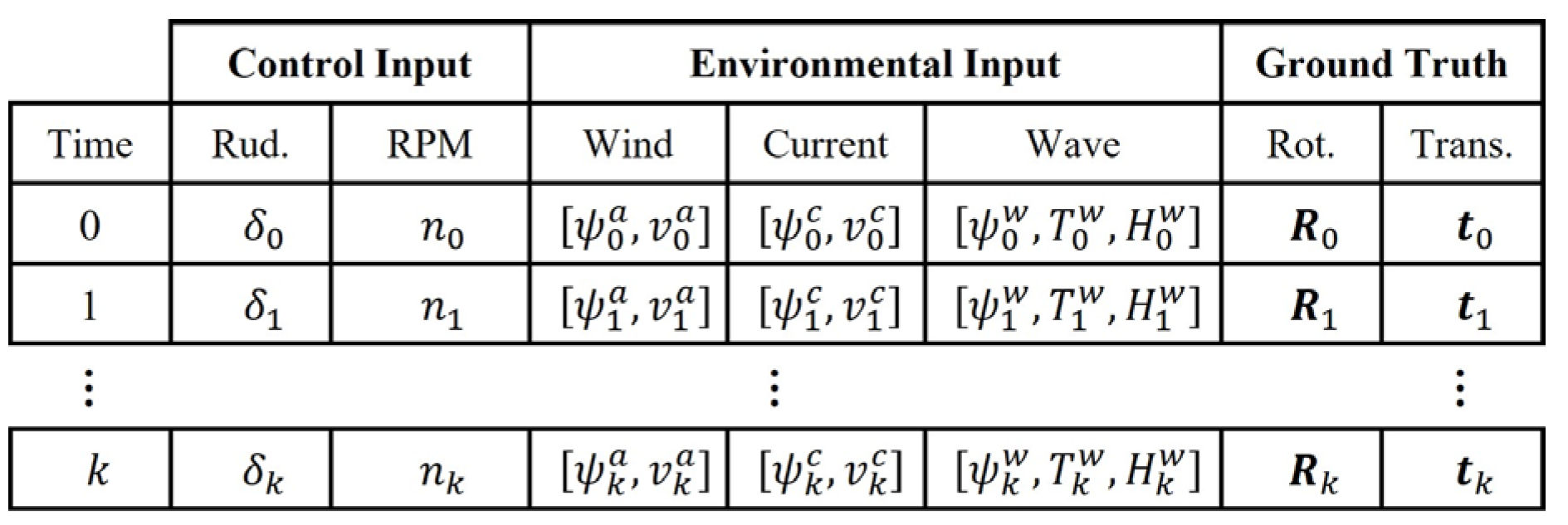
This section devises a dataset for validating the proposed ship motion simulation method in visual navigation aids. As shown in
Figure 4, the validation dataset contains three parts of data, namely, control input, environmental input and true value. Each row of the dataset is a 16-dimensional vector containing a 1-dimensional timestamp, a 1-dimensional rudder angle, a 1-dimensional propeller rate, a 2-dimensional wind vector, a 2-dimensional current vector, a 3-dimensional wave vector, a 3-dimensional Euler angle of the attitude (which can be converted from a rotation matrix or a 4-tuple) and a 3-dimensional position vector. Each dataset contains k moments of data, forming a matrix of size
.
Take the data at moment 0 as an example. The rudder angle in the control input is in degrees; the propeller rate is in revolutions per minute (RPM); the wind direction is in degrees; the wind velocity is in m/s; the flow direction is in degrees; the flow velocity is in m/s; the wave direction is in degrees; the wave period is in s; the wave height is in m; the attitude in the ground truth is , which represents a 3 × 3 rotation matrix, and is stored in the dataset as Euler angles with three components (roll angle , pitch angle and yaw angle ); the position is , and stored in the dataset as latitude, longitude and altitude.
2.4. Performance Indexs
The simulation performance on the validation dataset was measured by two kinds of metrics, namely, accuracy and real-time performance.
2.4.1. Accuracy
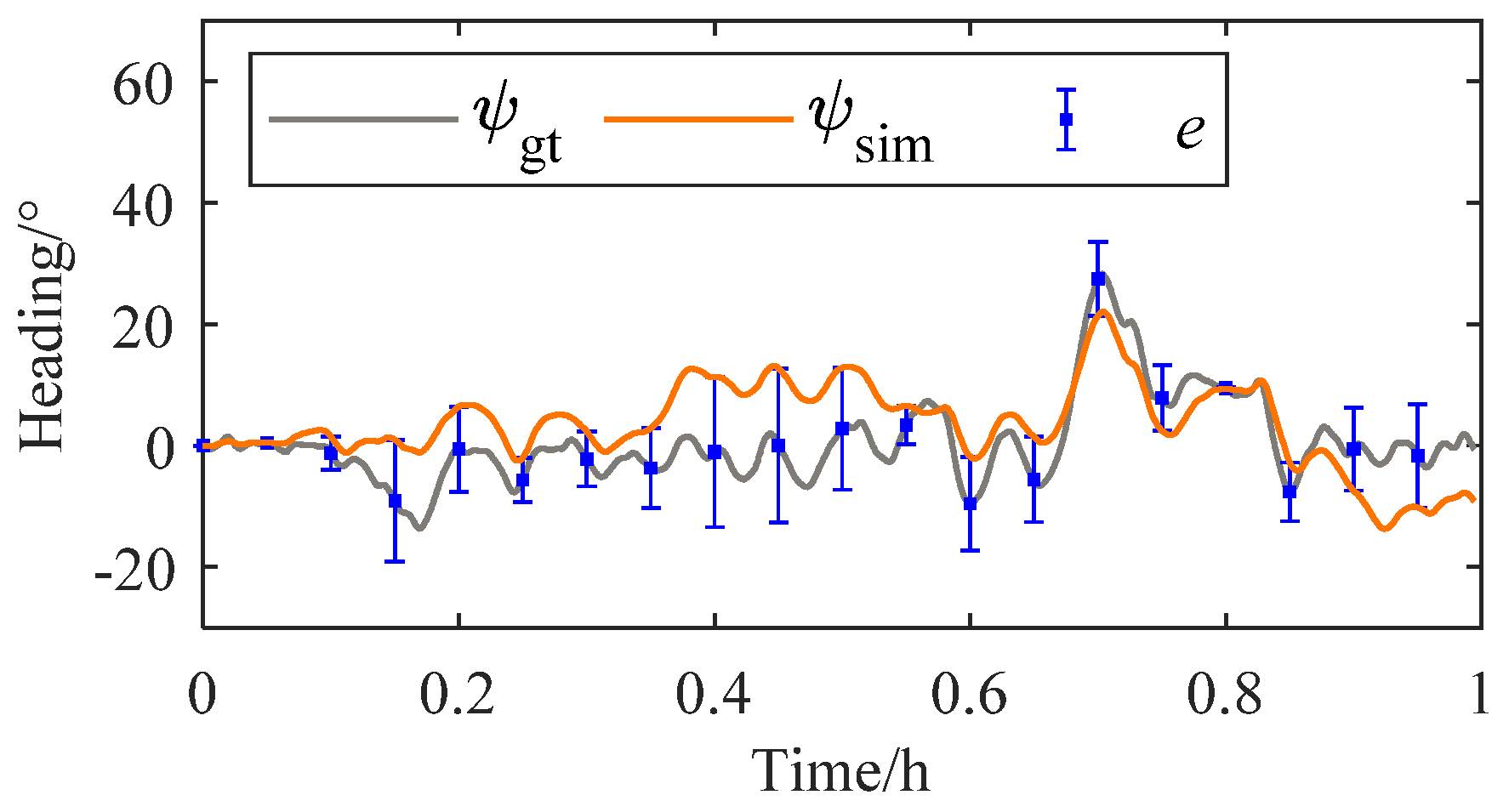
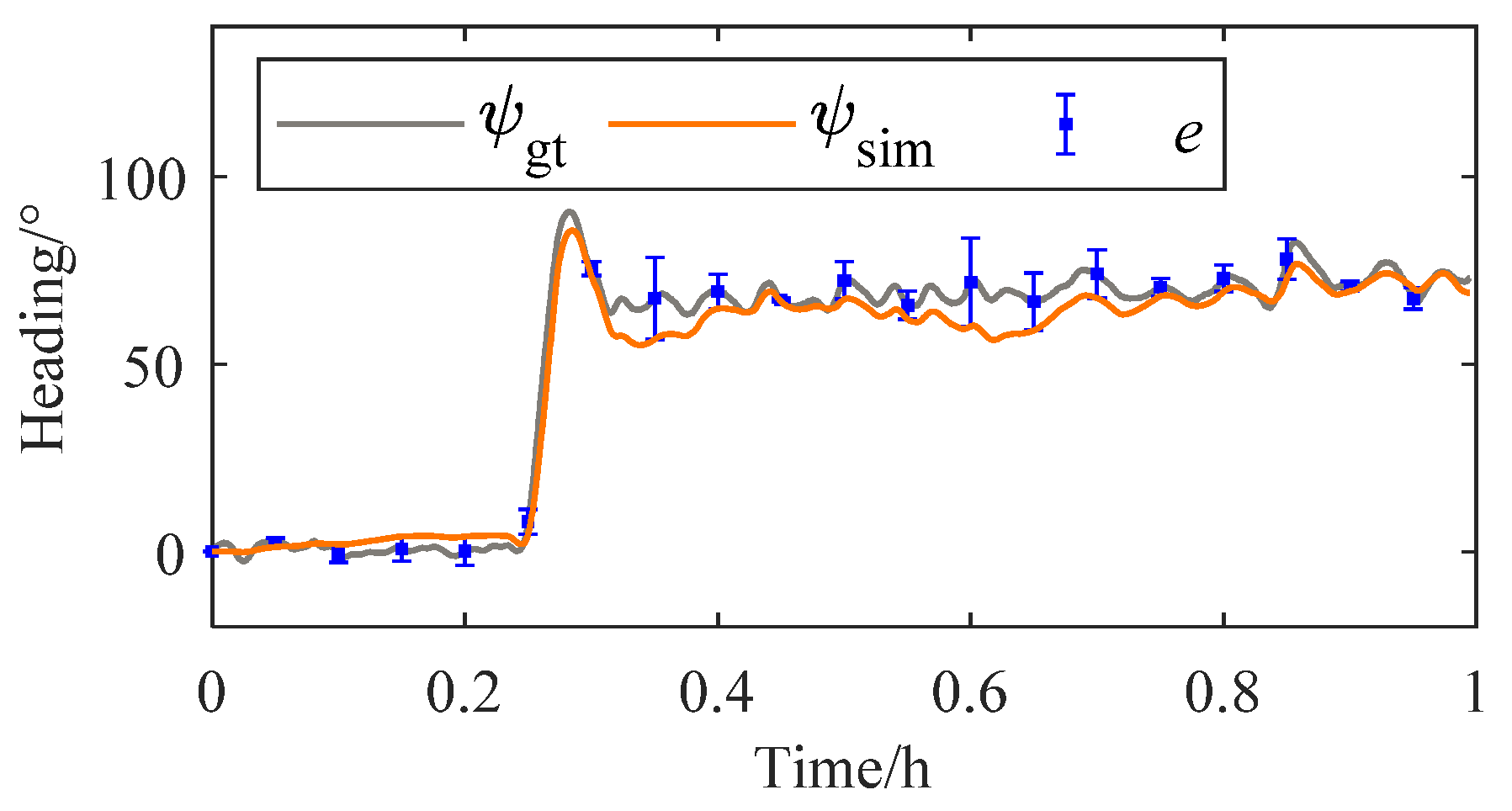
The simulation accuracy measures the error between the simulation data and the ground truth. The index mainly contains two types of data: attitude and trajectory. Since the ship’s attitude and position change constantly, the accuracy is measured by the absolute error in a fixed time range. Taking the heading data, for example, the simulation accuracy can be expressed as:
where
and
are the simulated and ground truth heading at time
k, respectively; the subscript “
gt” and “sim” indicate the ground truth and simulation;
is the absolute heading error at each moment
k; N is the number of rows in the matrix of the dataset with the constant physical time steps;
is the mean error over the whole dataset in units of
.
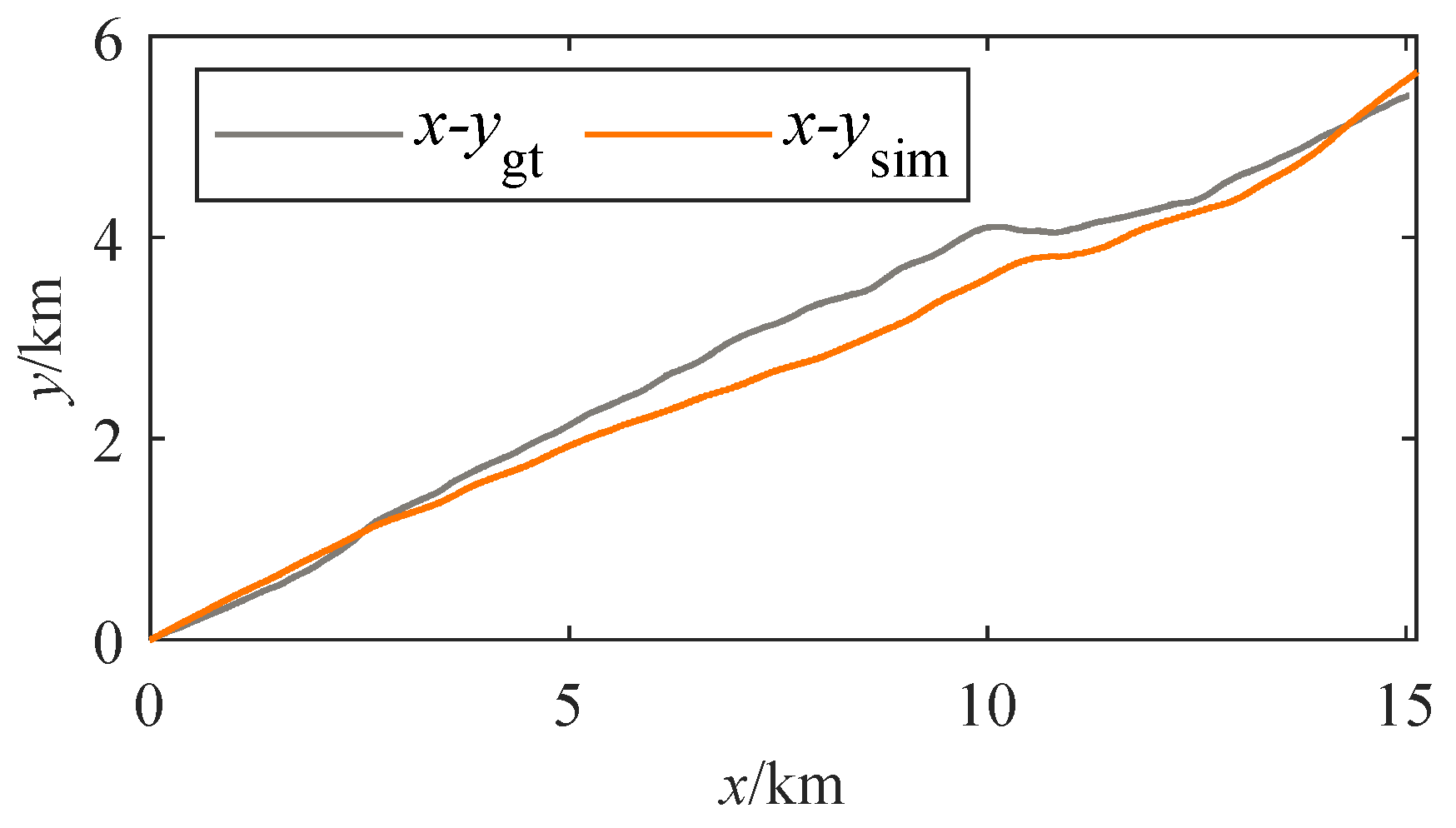
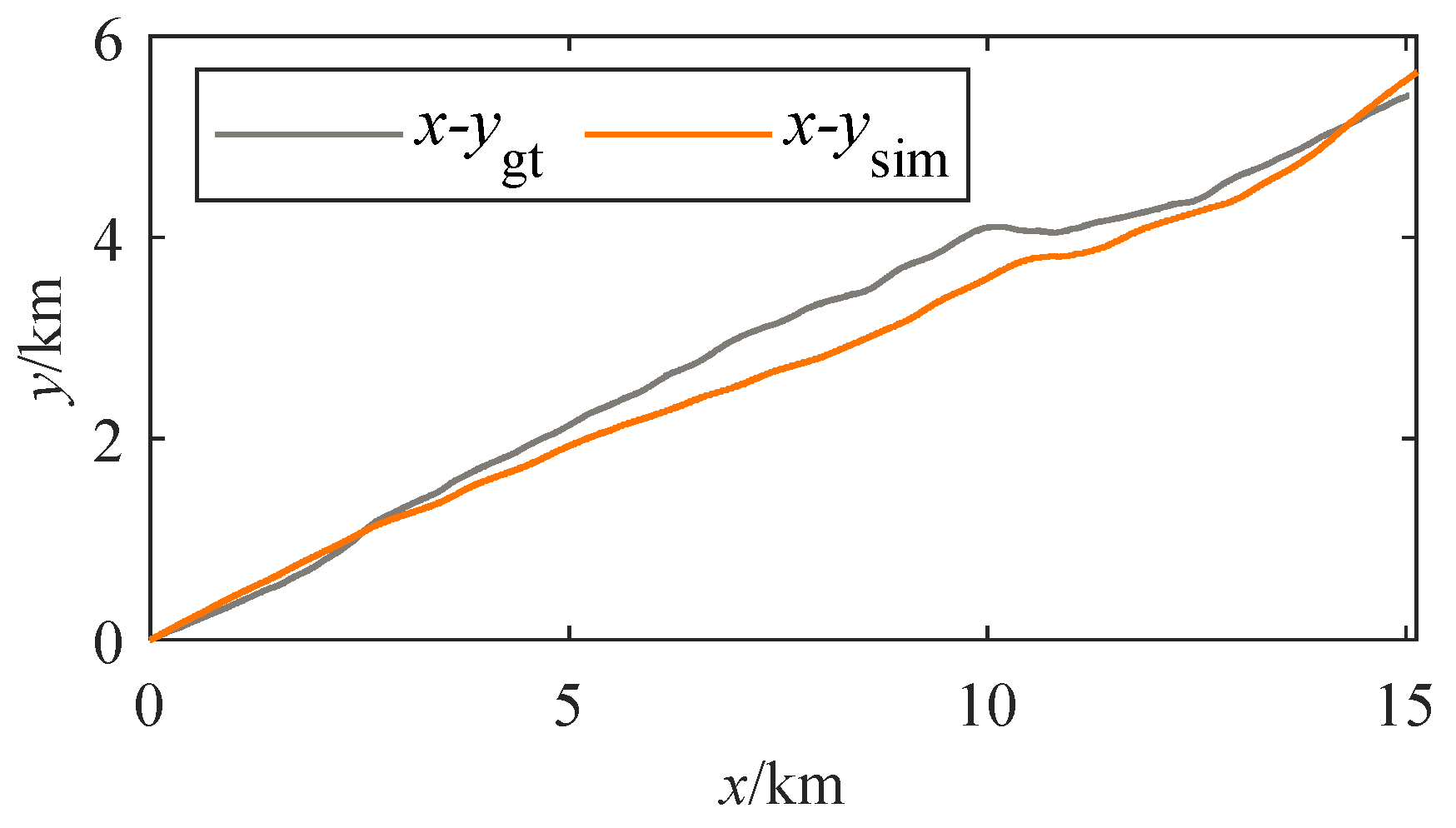
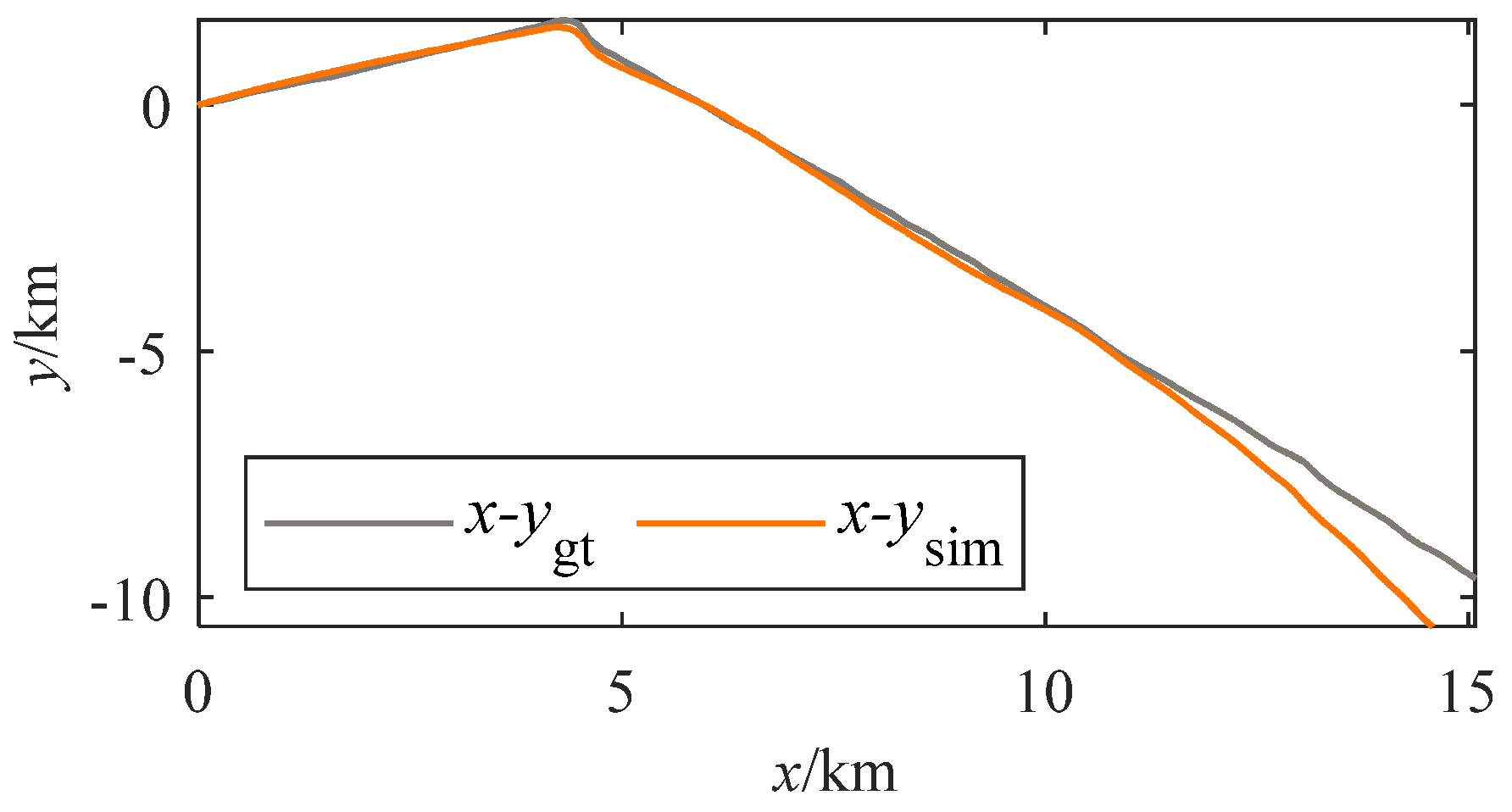
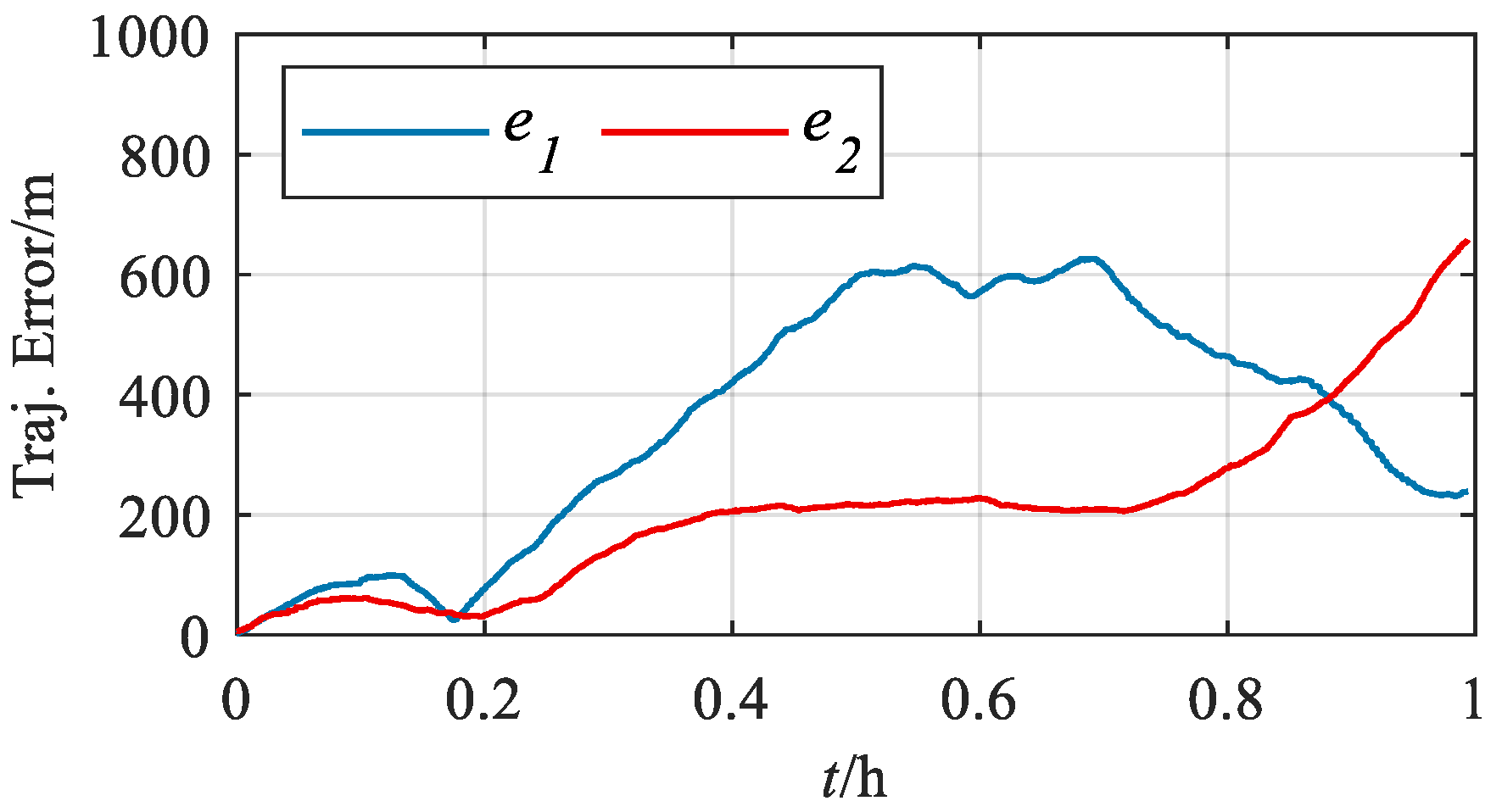
For the trajectory data, the latitude, longitude and height data are firstly converted to the east–north–up (ENU) coordinates. Then, the position of the ground truth values of row 0 in the dataset is taken as the origin of the ENU coordinate system. For the rest of the positions, coordinate conversion is implemented to derive the metric coordinates under that coordinate system. Next, the trajectory error is calculated:
where
and
are the simulated and ground truth positions at moment
k, respectively;
is the absolute trajectory error (2-norm) at each moment
k;
is the mean trajectory error over the whole dataset in units of
.
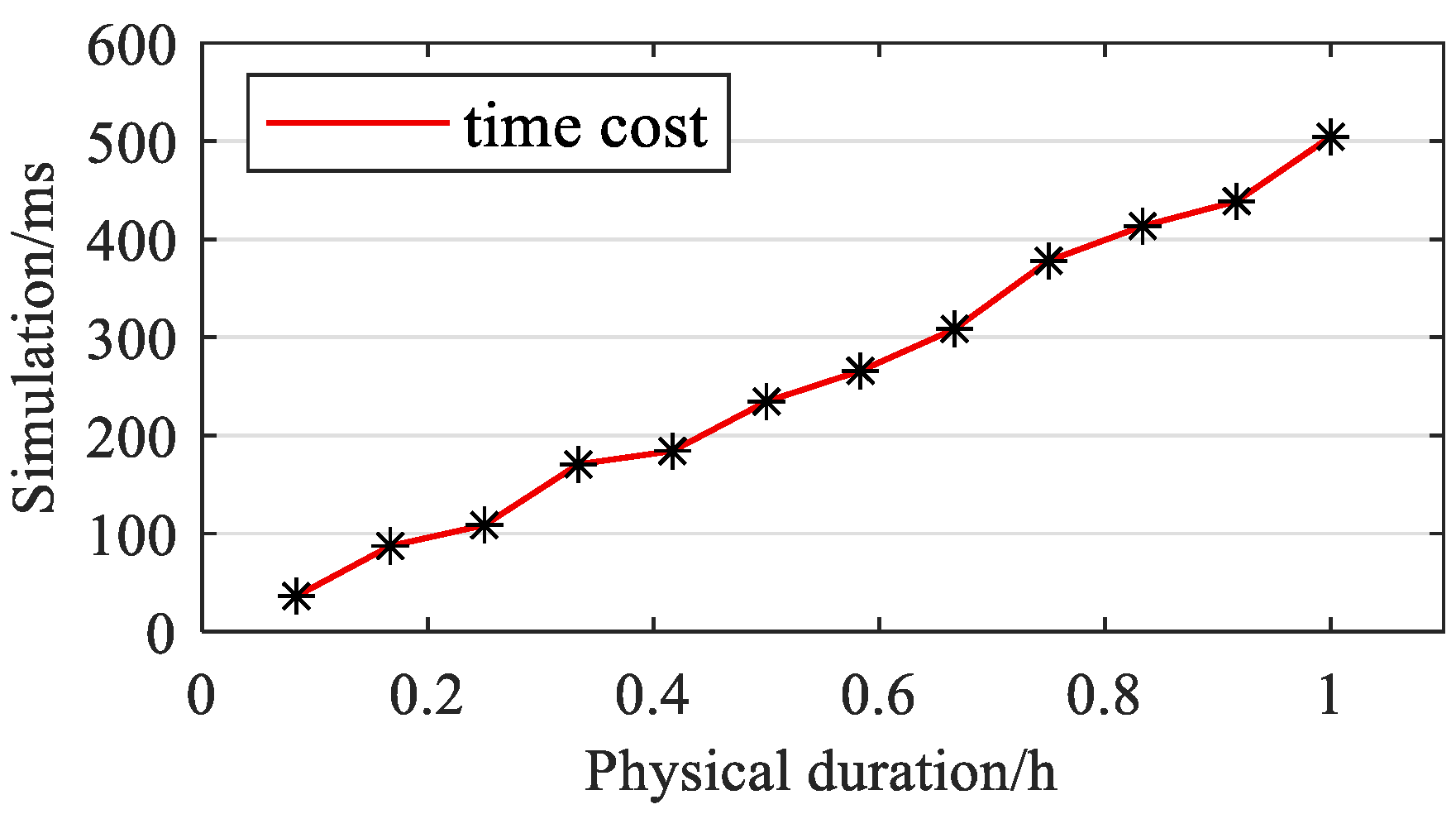
2.4.2. Real-Time Performance
Real-time performance measures the time cost of our simulation method on datasets of different physical durations. As shown in Equation (5), a dataset with physical duration t is divided into
subsets
with the interval of
, starting from
. Then, each subset is subjected to n tests on simulation time cost. The mean time cost
(ms) is thus obtained and plotted into a simulation time–cost curve for different physical durations.
4. Conclusions
Visual navigation aid systems on the water could improve intelligent ship perception ability. In this study, we designed a dynamic, data-driven simulation method and constructed validation datasets with performance indicators to simulate ship motions for visual navigation aids. The proposed method was verified on the proposed dataset for accuracy and real-time performance. In the two simulation cases, the mean errors of simulated heading and simulated trajectory were 5.7°/h and 282.6 m/h, respectively. Meanwhile, the proposed simulation program consumed a relatively short time. It output the simulation series for the next 6 min at roughly 42 frames per second (FPS) and provided the simulation series of the next hour at 2.1 FPS. It was indicated that the time consumption of online simulation could keep at a low level based on the interpolation of the offline databases, which is a compromise between speed and accuracy. The validation results show that our method simulated ship motions under the given control series and environment information in with acceptable error and high real-time performance, which is applicable to visual-aided navigation applications.
However, there are still some limitations in this work. The proposed simulation pipeline relies on mechanism modeling to simulate ship motions and requires the parameters of the specific type of ship under analysis. To further improve simulation accuracy and universality, future research may replace the ship motion model in our framework with data-driven artificial intelligence models, such as a recurrent neural network (RNN) model based on the proposed dataset. Additionally, the integration of ship motion simulation and navigation aid registration will be studied in future work.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}