
A Hybrid Data-Driven-Agent-Based Modelling Framework for Water Distribution Systems Contamination Response during COVID-19



Abstract
1. Introduction
2. Modelling Framework
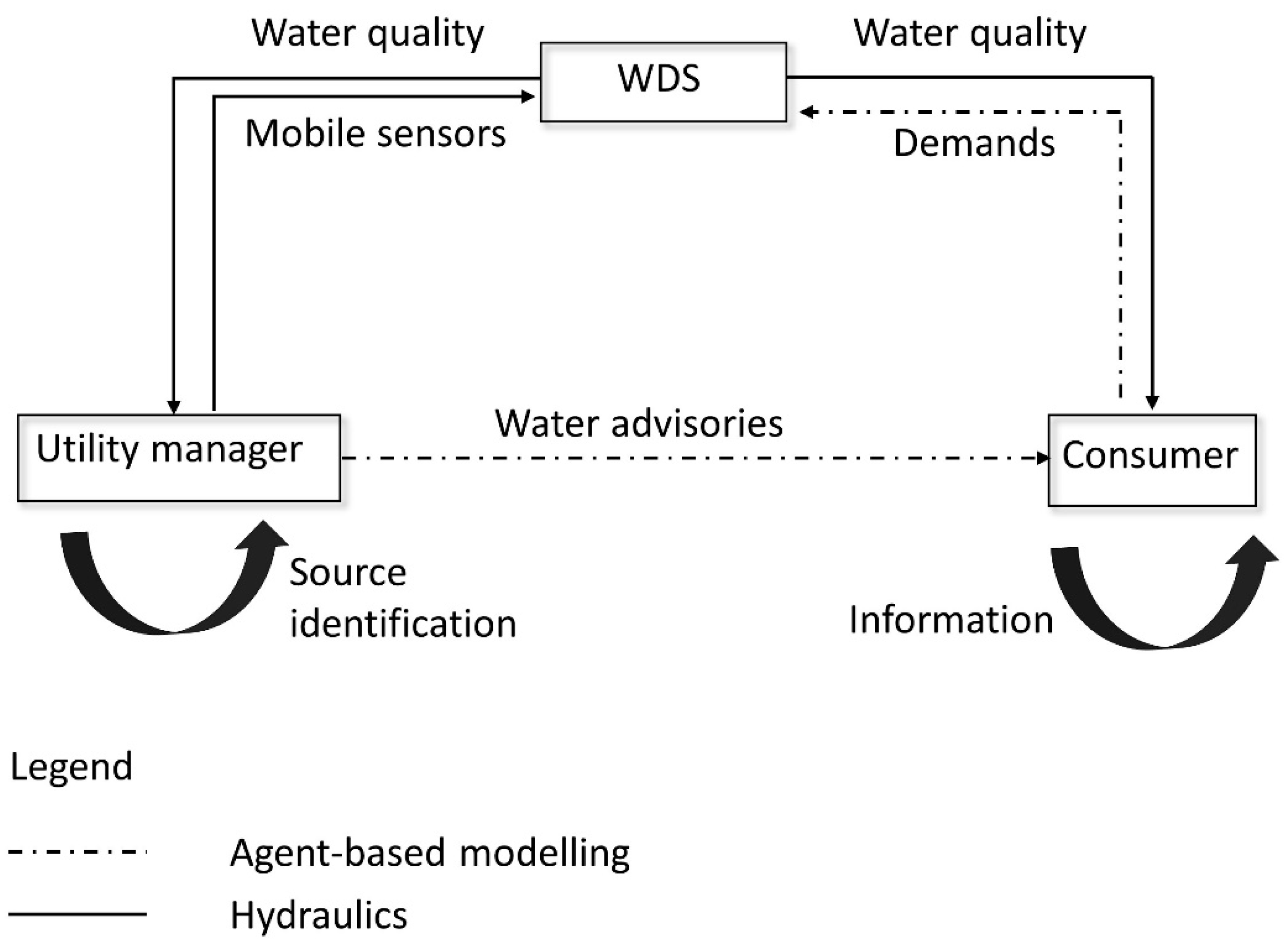
2.1. ABM Framework Coupled to a Hydraulic Simulator
2.2. Model Cycle
- The first time-step of the hydraulic and water quality simulation is initialised.
- The water quality data is transmitted to the agent-based model.
- The water quality data are processed, and respective actions or reactions are set in motion.
- In each timestep of the simulation, the status of the agents is updated
- A global water advisory for the whole water network is distributed.
- The consumer agents who receive the water advisory react according to their social background, location in the network and whether they experience symptoms from ingesting contaminated water. Their reactions might lead to changed demand behaviour and subsequently different hydraulic dynamics in the WDS that would result in a different distribution of the contaminant plume.
- Once the utility manager narrows down the partitions of the network that are endangered by placing mobile sensor equipment every other time-step, the water advisory is renewed for specific parts of the network.
- Consumer agents, according to their geographic location in the water network, might be reassured to continue consuming water if they are not in danger of ingesting a contaminant or continue to be on alert and react accordingly.
2.3. Role of the Utility Manager Agent
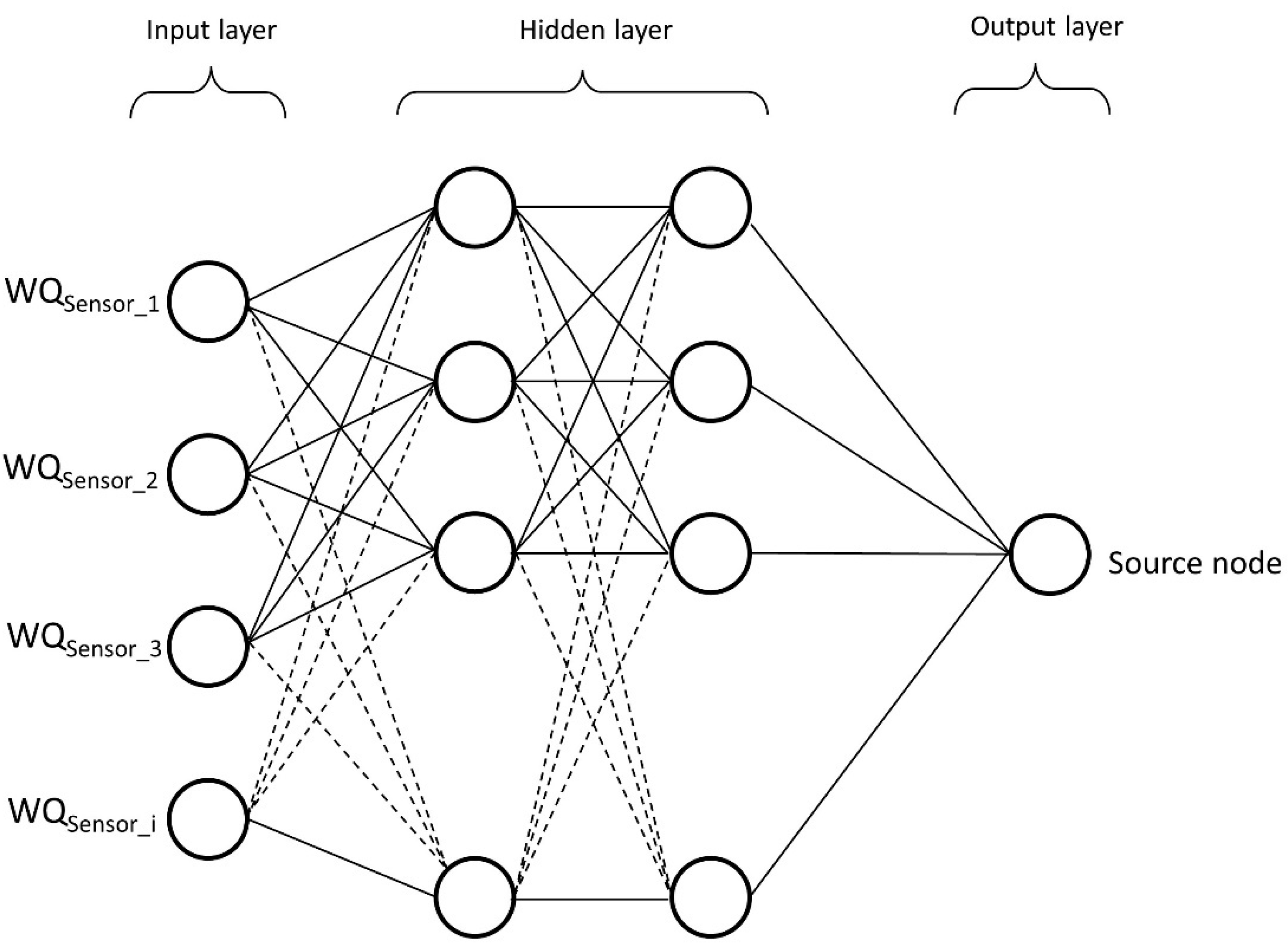
2.4. Source Identification Using Deep Learning
2.4.1. Data Generation
2.4.2. The Artificial Neural Network
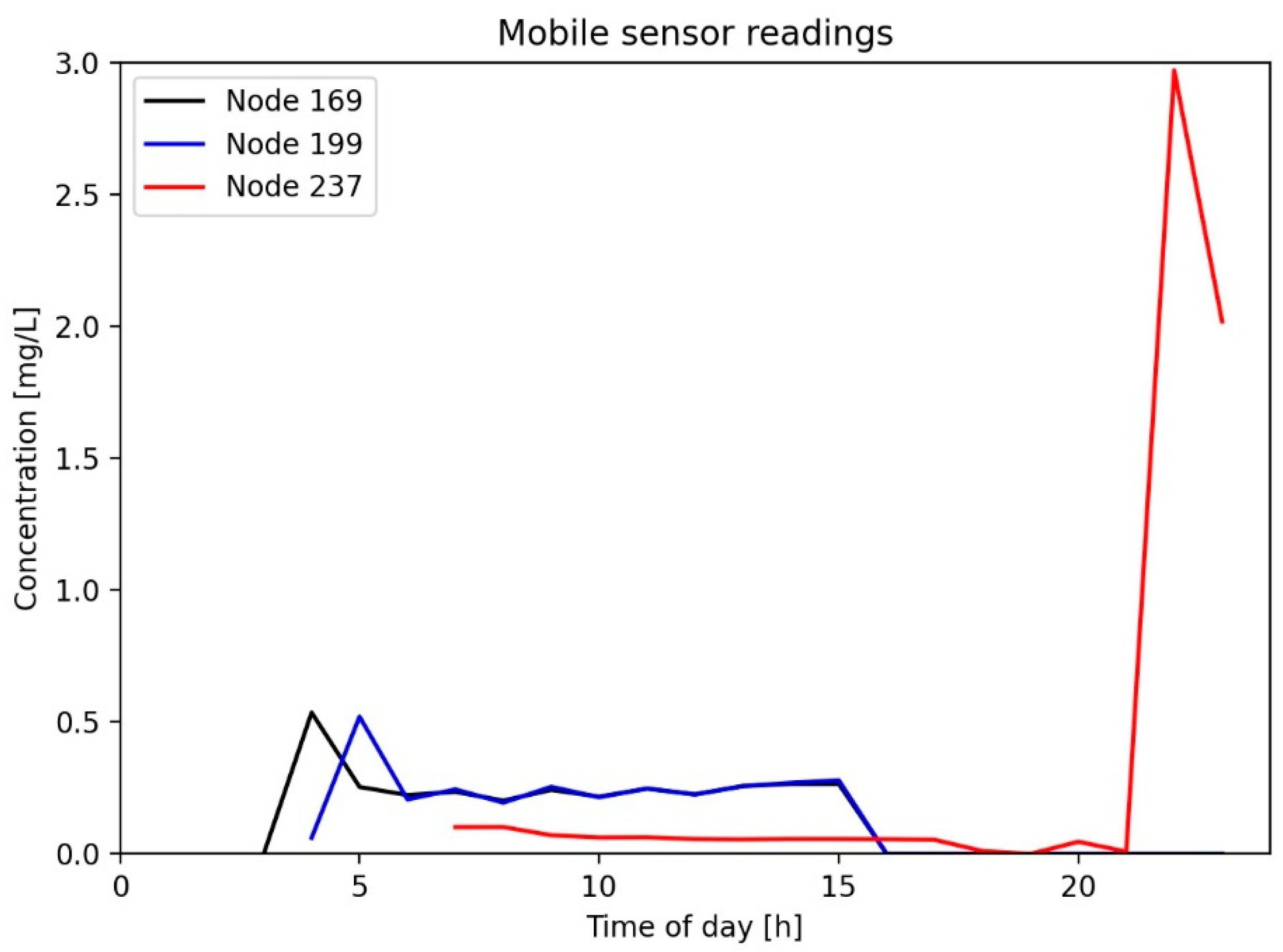
2.5. Placing Mobile Equipment
2.6. Issuing Warnings and Updates through Media Channels
2.7. Consumer Agents
2.8. Social Background and Distribution in the Network
2.9. Fuzzy Logic for Determining Consumers’ Actions
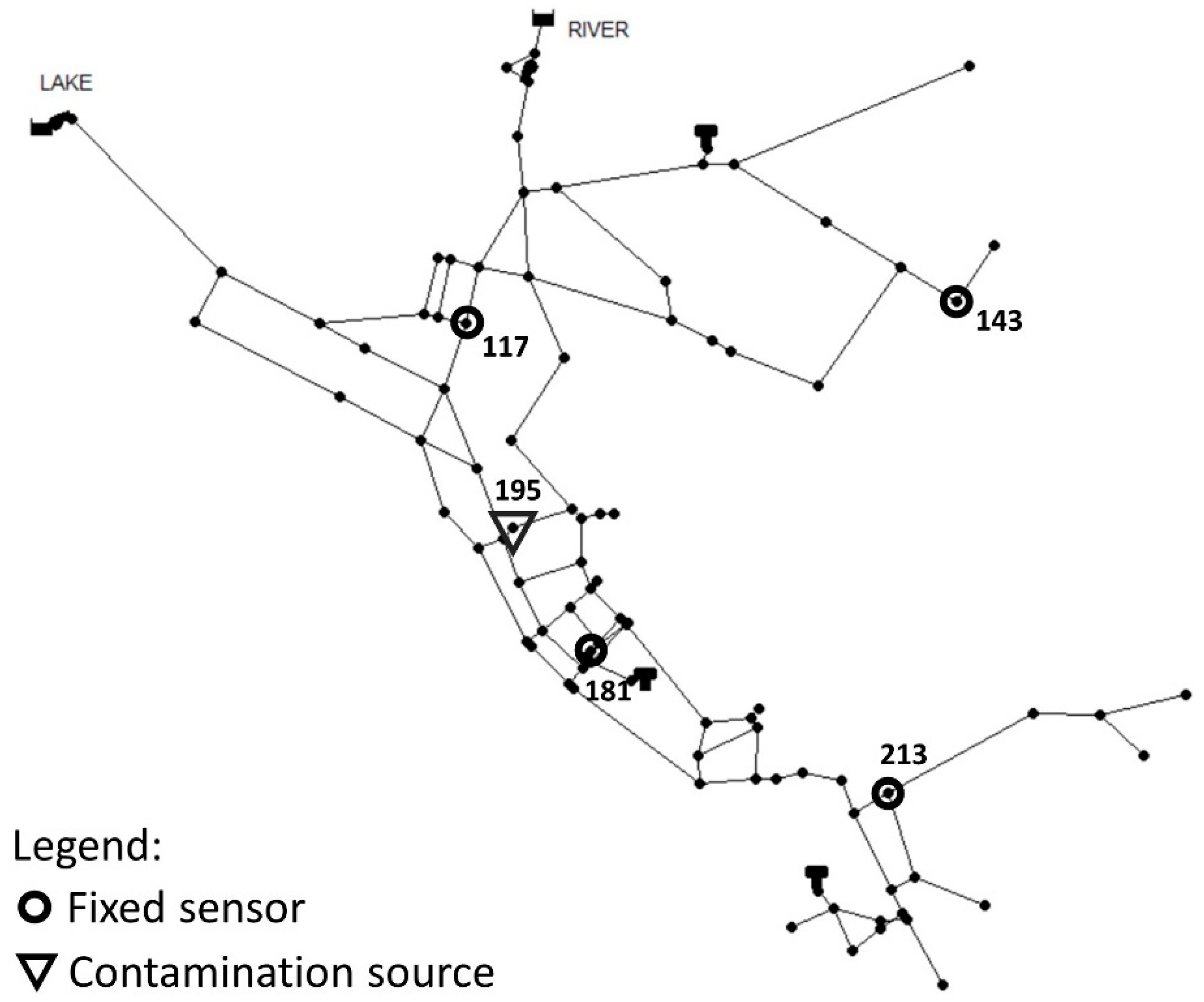
3. Example Application
3.1. Injection Scenario
3.2. Mobile Equipment Placement
3.3. Issuing Warnings to Consumer Agents
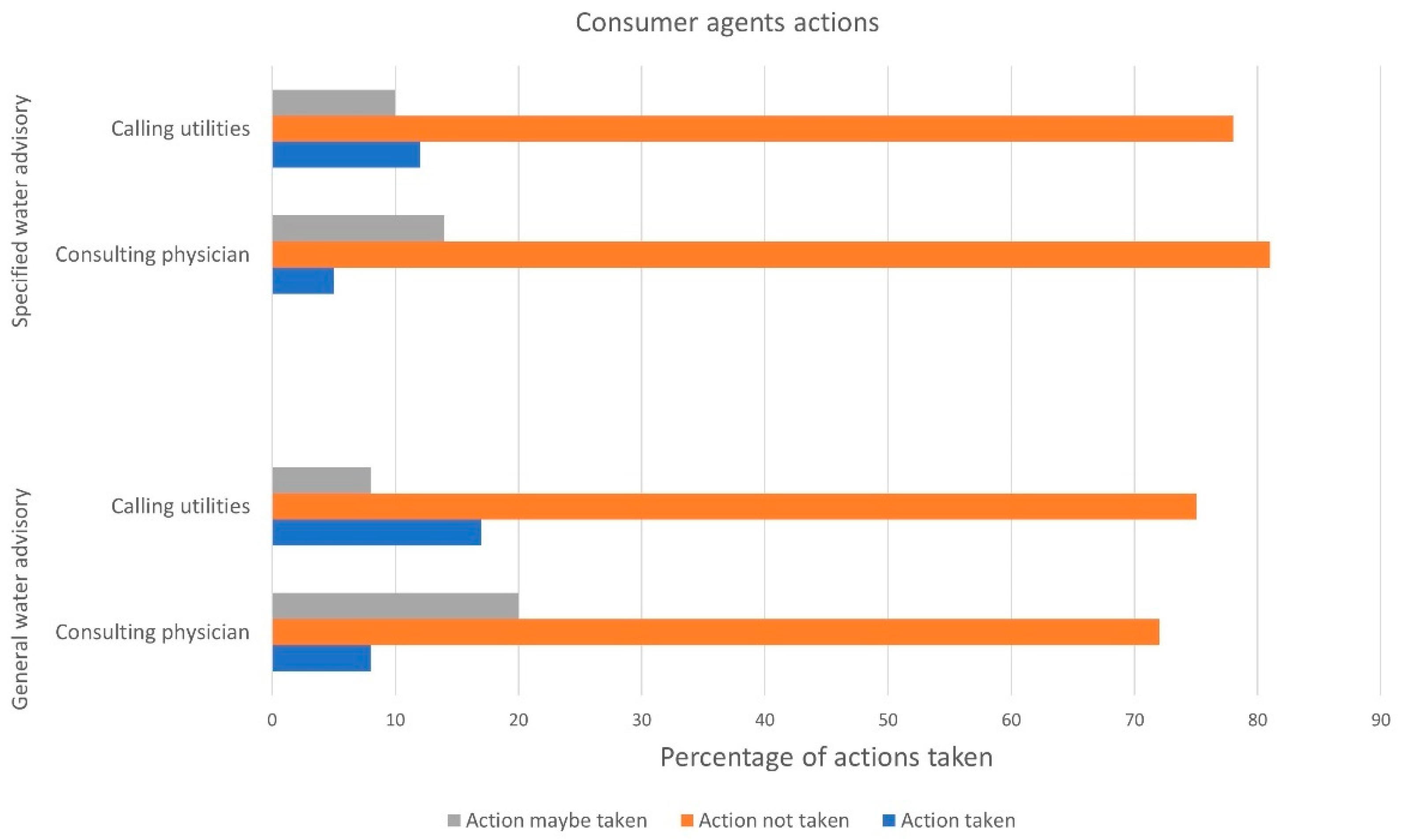
3.4. Consumer Agent Actions
3.5. Fuzzy Logic for Assigning Actions to Consumer Agents
4. Results
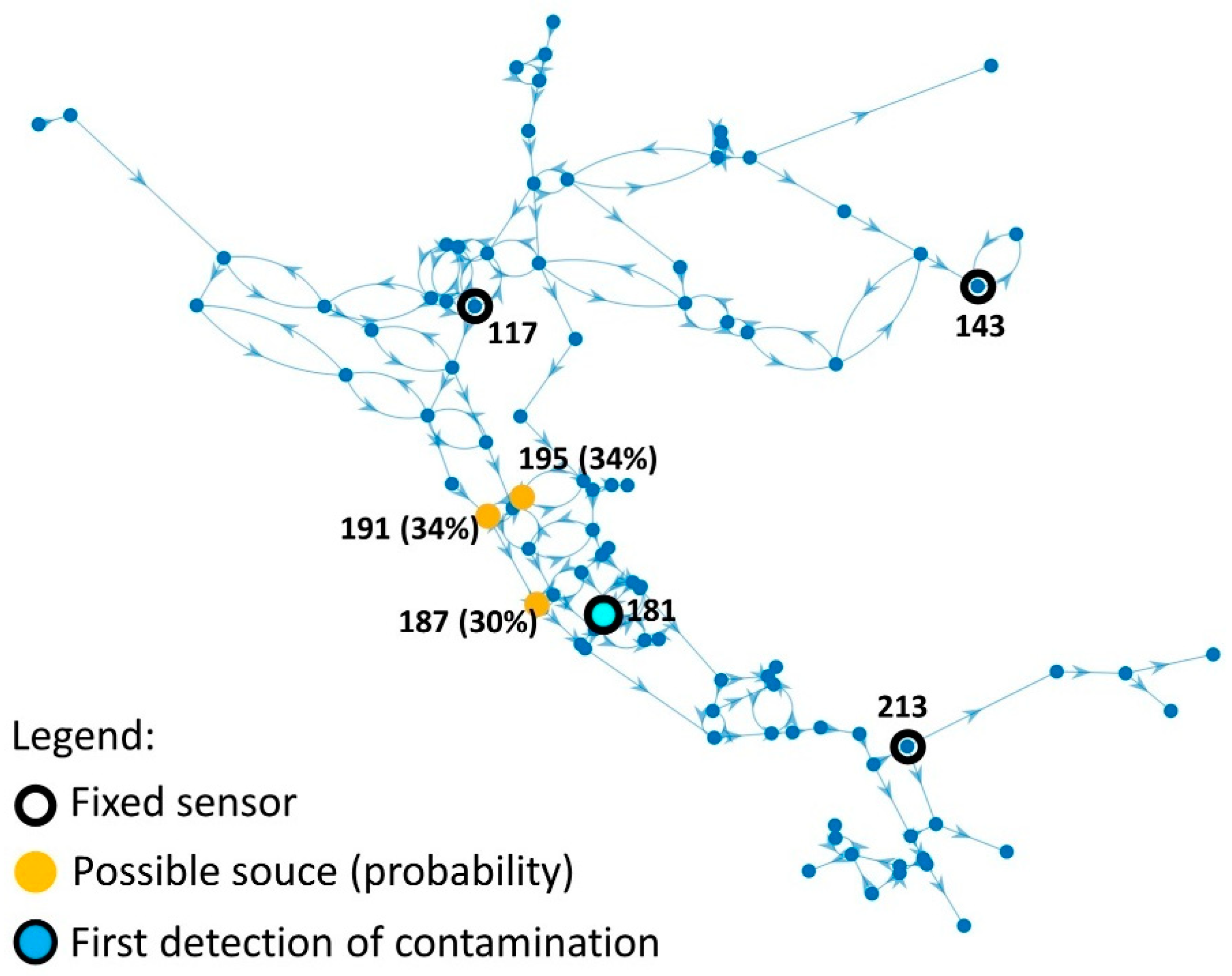
4.1. Accuracy of ANN to Determine the Contamination Source
4.2. Source Prediction and Mobile Sensor Placement
4.3. Water Advisories and Reaction of Consumer Agents
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Janke, R.; Murray, R.; Uber, J.; Taxon, T. Comparison of Physical Sampling and Real-Time Monitoring Strategies for Designing a Contamination Warning System in a Drinking Water Distribution System. J. Water Resour. Plan. Manag. 2006, 132, 310–314. [Google Scholar] [CrossRef]
- Hall, J.; Zaffiro, A.D.; Marx, R.B.; Kefauver, P.C.; Radha Krishnan, E.; Haught, R.C.; Herrmann, J.G. On-line water quality parameters as indicators of distribution system contamination. J. Am. Water Work. Assoc. 2007, 99, 66–77. [Google Scholar] [CrossRef]
- Ostfeld, A.; Salomons, E. Optimal layout of early warning detection stations for water distribution systems security. J. Water Resour. Plan. Manag. 2004, 130, 377–385. [Google Scholar] [CrossRef]
- Ostfeld, A.; Über, J.G.; Salomons, E.; Berry, J.W.; Hart, W.E.; Phillips, C.A.; Watson, J.P.; Dorini, G.; Jonkergouw, P.; Kapelan, Z.; et al. The battle of the water sensor networks (BWSN): A design challenge for engineers and algorithms. J. Water Resour. Plan. Manag. 2008, 134, 556–568. [Google Scholar] [CrossRef]
- Wu, L.; Wan Salim, W.W.A.; Malhotra, S.; Brovont, A.; Park, J.H.; Pekarek, S.D.; Banks, M.K.; Porterfield, D.M. Self-powered mobile sensor for in-pipe potable water quality monitoring. In Proceedings of the 17th International Conference on Miniaturized System for Chemistry and Life Science, MicroTAS 2013, Freiburg, Germany, 27–31 October 2013; Volume 1, pp. 14–16. [Google Scholar]
- Sankary, N.; Ostfeld, A. Inline mobile sensors for contaminant early warning enhancement in water distribution systems. J. Water Resour. Plan. Manag. 2017, 143, 04016073. [Google Scholar] [CrossRef]
- Sankary, N.; Ostfeld, A. Multiobjective optimization of inline mobile and fixed wireless sensor networks under conditions of demand uncertainty. J. Water Resour. Plan. Manag. 2018, 144, 04018043. [Google Scholar] [CrossRef]
- Kadinski, L.; Rana, M.; Boccelli, D.; Ostfeld, A. Water Distribution Systems Analysis. In Proceedings of the World Environmental and Water Resources Congress 2019; American Society of Civil Engineers: Reston, VA, USA, 2019; pp. 536–542. [Google Scholar]
- Kadinski, L.; Ostfeld, A. Incorporation of COVID-19-Inspired Behaviour into Contamination Responses. Water 2021, 13, 2863. [Google Scholar] [CrossRef]
- Asheri Arnon, T.; Ezra, S.; Fishbain, B. Water characterization and early contamination detection in highly varying stochastic background water, based on Machine Learning methodology for processing real-time UV-Spectrophotometry. Water Res. 2019, 155, 333–342. [Google Scholar] [CrossRef]
- Ashwini, C.; Singh, U.P.; Pawar, E. Shristi Water quality monitoring using machine learning and iot. Int. J. Sci. Technol. Res. 2019, 8, 1046–1048. [Google Scholar]
- Preis, A.; Ostfeld, A. A contamination source identification model for water distribution system security. Eng. Optim. 2007, 39, 941–947. [Google Scholar] [CrossRef]
- Taylor, P.; Preis, A.; Ostfeld, A. Civil Engineering and Environmental Systems Genetic algorithm for contaminant source characterization using imperfect sensors. Civ. Eng. Environ. Syst. 2008, 25, 37–41. [Google Scholar] [CrossRef]
- Kim, M.; Choi, C.Y.; Gerba, C.P. Source tracking of microbial intrusion in water systems using artificial neural networks. Water Res. 2008, 42, 1308–1314. [Google Scholar] [CrossRef] [PubMed]
- Lee, Y.J.; Park, C.; Lee, M.L. Identification of a Contaminant Source Location in a River System Using Random Forest Models. Water 2018, 10, 391. [Google Scholar] [CrossRef]
- Grbčić, L.; Lučin, I.; Kranjčević, L.; Družeta, S. Water supply network pollution source identification by random forest algorithm. J. Hydroinform. 2020, 22, 1521–1535. [Google Scholar] [CrossRef]
- Shafiee, M.E.; Berglund, E.Z. Complex adaptive systems framework to simulate the performance of hydrant flushing rules and broadcasts during a water distribution system contamination event. J. Water Resour. Plan. Manag. 2017, 143, 04017001. [Google Scholar] [CrossRef]
- Bonabeau, E. Agent-based modeling: Methods and techniques for simulating human systems. Proc. Natl. Acad. Sci. USA 2002, 99, 7280–7287. [Google Scholar] [CrossRef]
- Athanasiadis, I.N.; Mentes, A.K.; Mitkas, P.A.; Mylopoulos, Y.A. A Hybrid Agent-Based Model for Estimating Residential Water Demand. Simulation 2005, 81, 175–187. [Google Scholar] [CrossRef]
- Linkola, L.; Andrews, C.J.; Schuetze, T. An agent based model of household water use. Water 2013, 5, 1082–1100. [Google Scholar] [CrossRef]
- Ding, N.; Erfani, R.; Mokhtar, H.; Erfani, T. Agent based modelling forwater resource allocation in the transboundary Nile river. Water 2016, 8, 139. [Google Scholar] [CrossRef]
- Tillman, D.E.; Larsen, T.A.; Pahl-Wostl, C.; Gujer, W. Simulating development strategies for water supply systems. J. Hydroinform. 2005, 7, 41–51. [Google Scholar] [CrossRef][Green Version]
- Ehsan Shafiee, M.; Zechman, E.M. An agent-based modeling framework for sociotechnical simulation of water distribution contamination events. J. Hydroinform. 2013, 15, 862–880. [Google Scholar] [CrossRef]
- Shafiee, M.E.; Berglund, E.Z.; Lindell, M.K. An Agent-based Modeling Framework for Assessing the Public Health Protection of Water Advisories. Water Resour. Manag. 2018, 32, 2033–2059. [Google Scholar] [CrossRef]
- Monroe, J.; Ramsey, E.; Berglund, E. Allocating countermeasures to defend water distribution systems against terrorist attack. Reliab. Eng. Syst. Saf. 2018, 179, 37–51. [Google Scholar] [CrossRef]
- Zechman, E.M. Agent-based modeling to simulate contamination events and evaluate threat management strategies in water distribution systems. Risk Anal. 2011, 31, 758–772. [Google Scholar] [CrossRef]
- Kennedy, W.G. Modelling Human Behaviour in Agent-Based Models. In Agent-Based Models of Geographical Systems; Springer: Dordrecht, The Netherlands, 2012; pp. 167–179. ISBN 9789048189274. [Google Scholar]
- Wang, C.; Pan, R.; Wan, X.; Tan, Y.; Xu, L.; Ho, C.S.; Ho, R.C. Immediate psychological responses and associated factors during the initial stage of the 2019 coronavirus disease (COVID-19) epidemic among the general population in China. Int. J. Environ. Res. Public Health 2020, 17, 1729. [Google Scholar] [CrossRef]
- Pennycook, G.; McPhetres, J.; Zhang, Y.; Rand, D. Fighting COVID-19 misinformation on social media: Experimental evidence for a scalable accuracy nudge intervention. PsyArXiv Working Pap. 2020, 31, 770–780. [Google Scholar] [CrossRef]
- Van Bavel, J.J.; Baicker, K.; Boggio, P.S.; Capraro, V.; Cichocka, A.; Cikara, M.; Crockett, M.J.; Crum, A.J.; Douglas, K.M.; Druckman, J.N.; et al. COVID-19 pandemic response. Nat. Hum. Behav. 2020, 4, 460–471. [Google Scholar] [CrossRef]
- Spearing, L.A.; Thelemaque, N.; Kaminsky, J.A.; Katz, L.E.; Kinney, K.A.; Kirisits, M.J.; Sela, L.; Faust, K.M. Implications of Social Distancing Policies on Drinking Water Infrastructure: An Overview of the Challenges to and Responses of U.S. Utilities during the COVID-19 Pandemic. ACS ES&T Water 2021, 1, 888–899. [Google Scholar] [CrossRef]
- Maziarz, M.; Zach, M. Agent-based modelling for SARS-CoV-2 epidemic prediction and intervention assessment: A methodological appraisal. J. Eval. Clin. Pract. 2020, 26, 1352–1360. [Google Scholar] [CrossRef]
- Silva, P.C.L.; Batista, P.V.C.; Lima, H.S.; Alves, M.A.; Guimarães, F.G.; Silva, R.C.P. COVID-ABS: An agent-based model of COVID-19 epidemic to simulate health and economic effects of social distancing interventions. Chaos Solitons Fractals 2020, 139, 110088. [Google Scholar] [CrossRef]
- Sullivan, G.L.; Delgado-Gallardo, J.; Watson, T.M.; Sarp, S. An investigation into the leaching of micro and nano particles and chemical pollutants from disposable face masks-linked to the COVID-19 pandemic. Water Res. 2021, 196, 117033. [Google Scholar] [CrossRef] [PubMed]
- Bussan, D.D.; Snaychuk, L.; Bartzas, G.; Douvris, C. Quantification of trace elements in surgical and KN95 face masks widely used during the SARS-COVID-19 pandemic. Sci. Total Environ. 2022, 814, 151924. [Google Scholar] [CrossRef] [PubMed]
- Saberi-Movahed, F.; Mohammadifard, M.; Mehrpooya, A.; Rezaei-Ravari, M.; Berahmand, K.; Rostami, M.; Karami, S.; Najafzadeh, M.; Hajinezhad, D.; Jamshidi, M.; et al. Decoding Clinical Biomarker Space of COVID-19: Exploring Matrix Factorization-Based Feature Selection Methods. MedRxiv 2021. [Google Scholar] [CrossRef]
- Luo, J.; Zhou, L.; Feng, Y.; Li, B.; Guo, S. The selection of indicators from initial blood routine test results to improve the accuracy of early prediction of COVID-19 severity. PLoS ONE 2021, 16, e0253329. [Google Scholar] [CrossRef]
- Karthikeyan, A.; Garg, A.; Vinod, P.K.; Priyakumar, U.D. Machine Learning Based Clinical Decision Support System for Early COVID-19 Mortality Prediction. Front. Public Health 2021, 9, 626697. [Google Scholar] [CrossRef]
- Helbing, D.; Farkas, I.; Vicsek, T. Simulating dynamical features of escape panic. Nature 2000, 407, 487–490. [Google Scholar] [CrossRef]
- Eliades, D.G.; Kyriakou, M.; Vrachimis, S.; Polycarpou, M.M. EPANET-MATLAB Toolkit: An Open-Source Software for Interfacing EPANET with MATLAB. In Proceedings of the Computer Control for Water Industry (CCWI), Amsterdam, The Netherlands, 7–9 November 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Rossman, L. Epanet 2 Users Manual; U.S. Environmental Protection Agency: Washington, DC, USA, 2000.
- Shang, F.; Uber, J.G. Epanet Multi-Species Extension User’ S Manual; U.S. Environmental Protection Agency: Washington, DC, USA, 2011.
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Kashani, S. Deep Learning Interviews: Hundreds of fully Solved Job Interview Questions from a Wide Range of Key Topics in AI; Published by Shlomo Kashani, Tel-Aviv, ISRAEL; Cornell University: Ithaca, NY, USA, 2020; ISBN 1916243568. [Google Scholar]
- Fan, X.; Zhang, X.; Yu, X.B. Machine learning model and strategy for fast and accurate detection of leaks in water supply network. J. Infrastruct. Preserv. Resil. 2021, 6, 10. [Google Scholar] [CrossRef]
- Mashhadi, N.; Shahrour, I.; Attoue, N.; Khattabi, J. El smart cities Use of Machine Learning for Leak Detection and Localization in Water Distribution Systems. Smart Cities 2021, 4, 1293–1315. [Google Scholar] [CrossRef]
- Grbčić, L.; Kranjčević, L.; Družeta, S. Machine Learning and Simulation-Optimization Coupling for Water Distribution Network Contamination Source Detection. Sensors 2021, 21, 1157. [Google Scholar] [CrossRef]
- Klise, K.A.; Hart, D.; Moriarty, D.; Bynum, M.L.; Murray, R.; Burkhardt, J.; Haxton, T. Water Network Tool for Resilience (WNTR) User Manual Disclaimer; U.S. Environmental Protection Agency: Washington, DC, USA, 2017; pp. 59–64.
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Sarker, I.H. Deep Learning: A Comprehensive Overview on Techniques, Taxonomy, Applications and Research Directions. SN Comput. Sci. 2021, 2, 420. [Google Scholar] [CrossRef]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Systems. arXiv 2016, arXiv:1603.04467. [Google Scholar]
- Pedregosa, F.; Weiss, R.; Brucher, M. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- O’Malley, T.; Bursztein, E.; Long, J.; Chollet, F. KerasTuner. Retrieved May 2019, 21, 2020. [Google Scholar]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Gerla, G. Effectiveness and multivalued logics. J. Symb. Log. 2006, 71, 137–162. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hyperparameter | Four-Sensor Layout | Six-Sensor Layout |
|---|---|---|
| Layer number | 5 | 5 |
| Learning rate | 0.0001 | 0.0001 |
| Unit 1 | 480 | 448 |
| Dropout unit 1 | 0 | 0.1 |
| Unit 2 | 416 | 96 |
| Dropout unit 2 | 0 | 0 |
| Unit 3 | 512 | 288 |
| Dropout unit 3 | 0.1 | 0 |
| Unit 4 | 448 | 512 |
| Dropout unit 4 | 0.1 | 0.1 |
| Unit 5 | 64 | 320 |
| Dropout unit 5 | 0.1 | 0.2 |
| ANN Accuracy | Four-Sensor Layout | Six-Sensor Layout |
|---|---|---|
| Exact source | 48.2% | 60.8% |
| Top 3 | 61.8% | 72.5% |
| Top 5 | 66.0% | 76.7% |
| Top 10 | 69.8% | 79.8% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kadinski, L.; Salcedo, C.; Boccelli, D.L.; Berglund, E.; Ostfeld, A. A Hybrid Data-Driven-Agent-Based Modelling Framework for Water Distribution Systems Contamination Response during COVID-19. Water 2022, 14, 1088. https://doi.org/10.3390/w14071088
Kadinski L, Salcedo C, Boccelli DL, Berglund E, Ostfeld A. A Hybrid Data-Driven-Agent-Based Modelling Framework for Water Distribution Systems Contamination Response during COVID-19. Water. 2022; 14(7):1088. https://doi.org/10.3390/w14071088
Chicago/Turabian StyleKadinski, Leonid, Camilo Salcedo, Dominic L. Boccelli, Emily Berglund, and Avi Ostfeld. 2022. "A Hybrid Data-Driven-Agent-Based Modelling Framework for Water Distribution Systems Contamination Response during COVID-19" Water 14, no. 7: 1088. https://doi.org/10.3390/w14071088
APA StyleKadinski, L., Salcedo, C., Boccelli, D. L., Berglund, E., & Ostfeld, A. (2022). A Hybrid Data-Driven-Agent-Based Modelling Framework for Water Distribution Systems Contamination Response during COVID-19. Water, 14(7), 1088. https://doi.org/10.3390/w14071088