1. Introduction
Aquatic plants are an important part of the ecological environment and are widely distributed in rivers, lakes, and offshore areas. In natural rivers, aquatic vegetation is generally classified as emerged and submerged, rigid and flexible. Positive and negative feedback widely exists between various aquatic vegetation and river morphology [
1]. Vegetation can affect sediment transport and flow structure. The density and arrangement of vegetation affect the water flow to some extent, and the increase in plant density also increases flow resistance [
2]. The significance of the interaction between aquatic plants and water flow in natural rivers must be studied. Zong and Nepf represented vegetation patches and plants with 2D circular porous obstruction and rigid cylinders, respectively, because rigid cylinders can approximately simulate stems [
3]. They also experimentally investigated the turbulent wake behind a single 2D emerged vegetation patch, described the length and stability of this wake and investigated the effect of patch diameter and porosity on this wake [
3]. This type of simulation has also been used in many studies. Liu et al. studied the resistance estimation of rigid submerged vegetation using similar cylindrical arrays [
4]. Caroppl et al. measured the characteristics of wake flows after a real riparian vegetation patch and found that the presence of leaves is a key factor in the obstructing effect of vegetation patches on water flow [
5]. Huai and Zhang et al. conducted physical experiments to study the flow structure near flexible submerged aquatic vegetation with leaves [
6]. By contrast, cylindrical arrays are easy to implement and are effective in simulating vegetation patches. Yu and Shan et al. conducted experiments using rigid cylinders as representative of vegetation to investigate the wake structure behind an individual vegetation patch and found that variations in the density and length of vegetation patches along the streamwise direction affect the steady wake flow [
7]. White and Nepf also used rigid cylindrical arrays to represent aquatic plants and performed laboratory experiments to study and characterize the flow structure and characteristics around the cylindrical arrays [
8]. Related numerical simulation studies also simulated vegetation communities as rigid cylinder arrays. Liu and Huai et al. studied the flow structure and characteristics around submerged vegetation patches through three-dimensional CFD numerical simulation [
9]. Because of the important influence of aquatic vegetation on rivers, further research is necessary to study the interaction between aquatic plant patches and water flow, which is also the starting point of the current work.
Computational fluid dynamics (CFD), a branch of fluid dynamics, is an available and reliable tool commonly used in various research fields. CFD provides an operational platform for engineers to simulate actual working conditions and has been widely used to study the interaction between water flow and aquatic plants. RANS, large eddy simulation (LES), and direct numerical simulation are currently the main methods for numerical fluid simulation. Common turbulent flow models include the Spalart–Allmaras model, standard
k-
ε model, RNG
k-
ε model, realizable
k-
ε model, standard
k-
ω model, SST
k-
ω model, Reynolds stress model (RSM), and LES, etc. An important research step is to choose a proper turbulence model to describe the turbulence. Liu and Huai et al. conducted a numerical simulation on the resistance characteristics of rigid submerged vegetation, in which LES was used to simulate the flow around the vegetation patches [
10]. Liu and Chen used an improved RNG
k-
ε turbulence model to simulate the flow in open waters and vegetation waters. The predicted results are in good agreement with the experimental data, proving that the improved RNG
k-
ε turbulence model has good performance in the flow field near vegetation [
11]. Liu and Huai et al. used 3D LES to numerically study hydrodynamics in open channels with an array of square vegetation patches that are discontinuously distributed along the river bank. They found that LES performs well in predicting the variation of turbulence structure with different densities and distances of vegetation array [
12]. Anjum and Ghani et al. developed a 3D geometric model to study the internal flow structure of a two-layer vegetated patch, which was solved with the 3D RSM to obtain the distribution of mean velocity and Reynolds stress at different flow rates [
13]. Anjum and Tanaka used RSM for 3D numerical simulations to investigate the turbulent flow characteristics of water flow in a channel arranged with double-layered vegetation, submerged vegetation, and emerged vegetation with the same vegetation density [
14]. Meanwhile, different works have used different turbulent flow models for the simulation of turbulent flow behind vegetation patches in the flow channel. In the case of complex numerical fluid dynamics, the accuracy and efficiency of simulation vary among different turbulent flow models. A comparison of basic turbulence models is currently needed to provide guidance for future research and support the application of CFD in the study of vegetation–water flow interaction.
Submerged vegetation and emerged vegetation are common types of aquatic vegetation in river channels. 2D models are suitable for the numerical simulation of rigid emerged vegetation. Meanwhile, 3D models are usually adopted for the numerical simulation of submerged vegetation patches. For emerged vegetation in rivers, its interaction with water flow has been investigated for vegetation patches of different shapes and distributions. Qu and Yu conducted a 2D numerical simulation of an isolated emerged vegetation patch in a channel. By using a simple formula of flow velocity distribution, this highly simplified method captures the key features of stable wake, wake recovery, and von–Kármán vortex street [
15]. Zhan and Hu et al. introduced a nonconstant inertial resistance coefficient and used a porous media approach to numerically simulate the emerged vegetation in a 2D channel. They found that the improved porous media model can reasonably predict water flow [
16]. Yamasaki and Lima et al. investigated the interaction between the emerged vegetation patches and water flow by 2D CFD and simulated the evolutionary processes of the patch erosion and growth of emerged vegetation in the channel [
17]. Zhu and Yang et al. investigated the evolution trends of vegetation patches using a 2D shallow water equation and simulated the evolutionary behavior of vegetation patches in the river channel by setting different initial conditions [
18]. Relevant physical experiments were also conducted. Li and Huai et al. performed laboratory experiments to investigate the hydrodynamics and turbulent structure in a channel with multiple emerged vegetation patches distributed on one side by simplifying the vegetation to rigid groups of fine cylinders and setting different vegetation densities, diameters of vegetation patches, and distances between adjacent vegetation patches [
19].
The Reynolds average models have a wide range of applications and require relatively fewer computational costs. The application of RANS-based turbulent flow models in the simulation of turbulence in river channels was investigated. Farhadi and Mayrhofer et al. selected the standard
k-
ε model and two
k-
ω models to simulate turbulent structures in a river section of a runway channel. The comparison with the experimental data revealed that all three models underestimated the intensity of turbulence in the river channel, although they were able to achieve good predictions of the mean velocity [
20]. Shaheed et al. investigated the comparative simulation performance of the standard
k-
ε model and realizable
k-
ε model for flow characteristics in the bends and confluences of an open channel [
21]. Only a few comparative studies have been conducted on the performance of RANS-based turbulence models in the numerical simulation of wake after rigid emerged vegetation patches. For the numerical simulation of the interaction between the emerged aquatic vegetation and water flow in an open channel, the applied RANS model varied in different reports. Using the
k-
ε model, Lina and Nepf conducted a 2D simulation study of the flow field near two adjacent circular vegetation patches of equal diameter and investigated different distributions of two adjacent vegetation patches on the wake and interaction [
22]. Brito and Fernandes et al. used the porous media model to carry out the 3D RANS numerical simulation of water flow with submerged vegetated floodplains and obtained the correct simulation [
23]. In the current work, a simple numerical simulation experiment of a straight channel arranged with an isolated emerged vegetation patch was performed to investigate the applicability of several existing available turbulent flow models in the simulation of the interaction between the emerged vegetation and water flow. The results of numerical simulations were analyzed and compared with those published by Zong and Nepf [
3]. The implementation of the numerical simulation is described in the next section.
3. Results and Discussion
Analysis was conducted on the performance of the six commonly used turbulence models in simulating and predicting the interaction between vegetation patches and water flow.
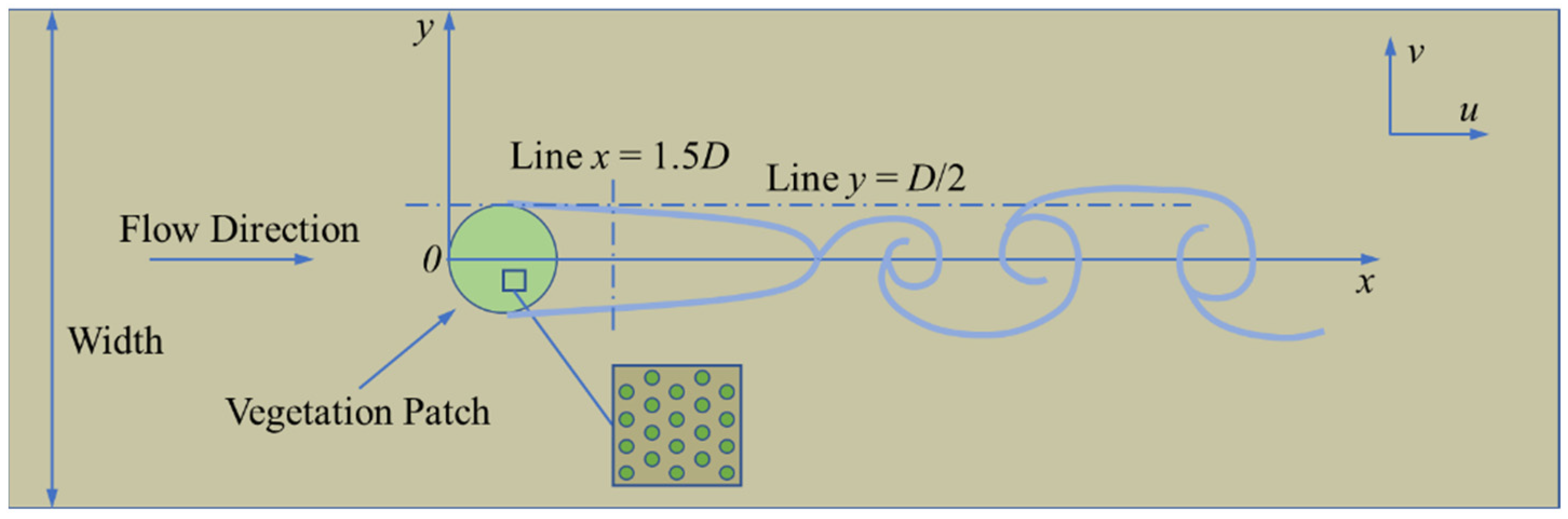
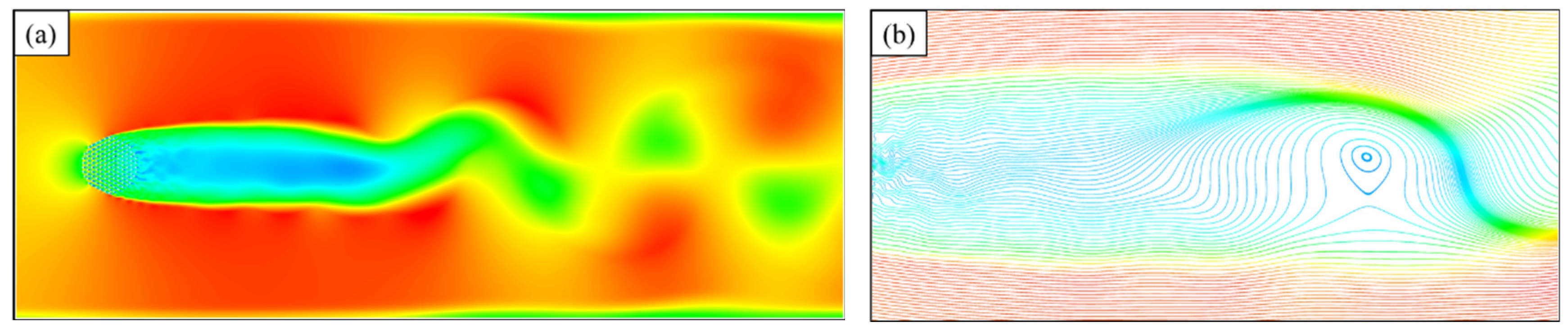
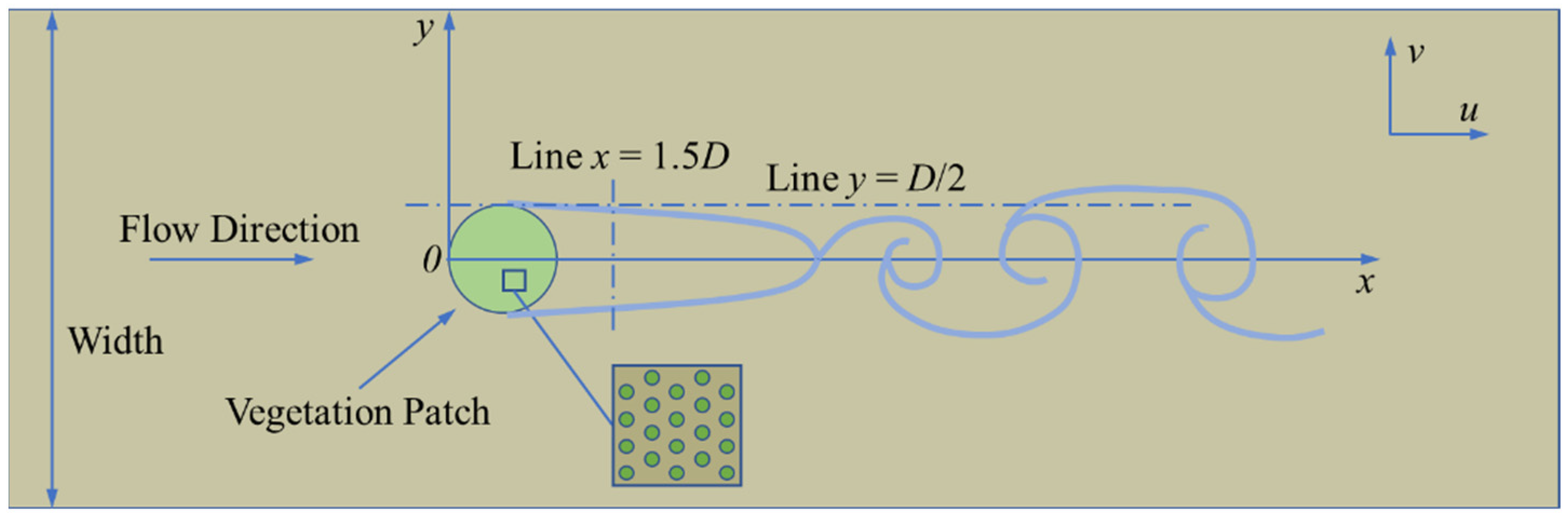
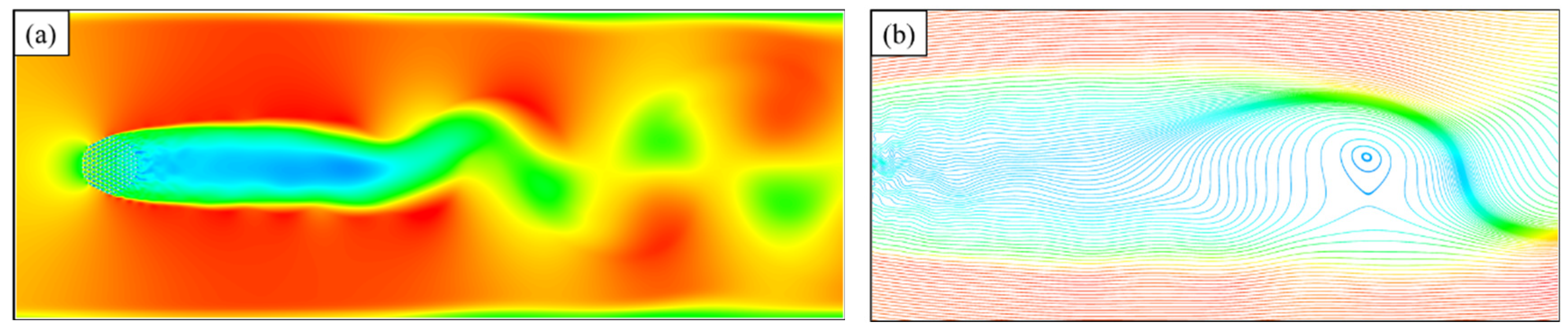
Figure 5 shows the wake behind the vegetation patch, the shear flow on both sides of the wake, and the special flow velocity distribution due to the von-Kármán vortex street behind the stable wake section. The smooth streamline diagram of flow after an emerged vegetation patch arranged in the channel is provided in
Figure 5.
Represented by
L, the total wake segment length spans from the downstream edge of the vegetation patch to the location at the centerline, where the velocity recovery rate is reduced to 0.1, i.e.,
The wake segment is composed of a stable wake segment and a wake recovery segment. The stable wake segment is an area between the downstream edge of the vegetation patch and the formation location of the vortex street, and its length is represented by
L1. The length of the wake recovery segment is represented by
L2,
[
3].
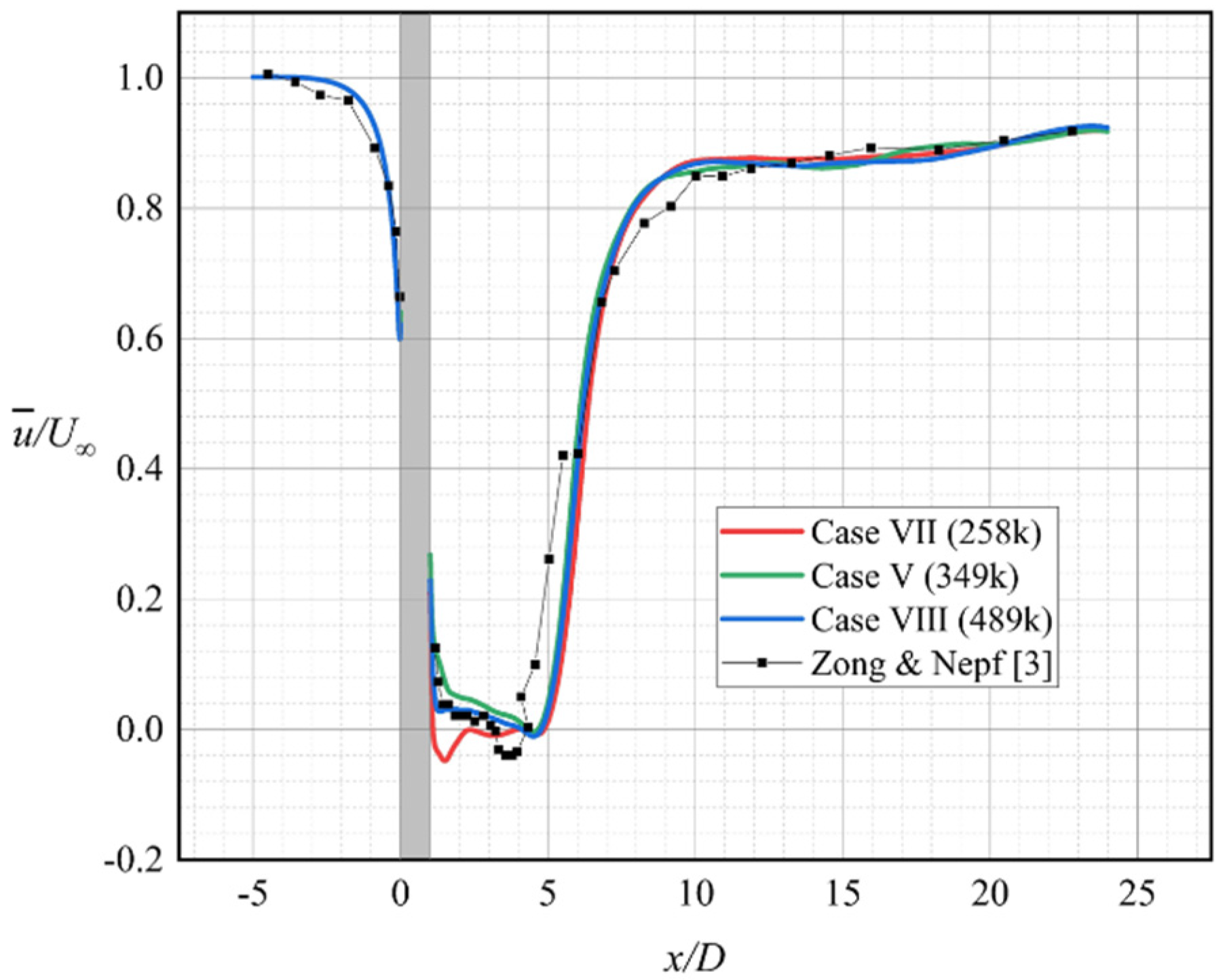
In the preliminary analysis, all six turbulence models were able to make predictions of the interaction between an emerged vegetation patch and the water flow. The simulation results of the six turbulence models were all consistent with the physical characteristics derived from the experiments of Zong and Nepf [
3]. However, differences in results were observed for each numerical simulation, and all of the model results exhibited different degrees of deviation from the experimental results. Among them, the RSM model showed the most unsatisfactory performance in predicting the vegetation patch wake.
3.1. Comparative Analysis of Mean Velocity Profile and Wake Segment Simulation
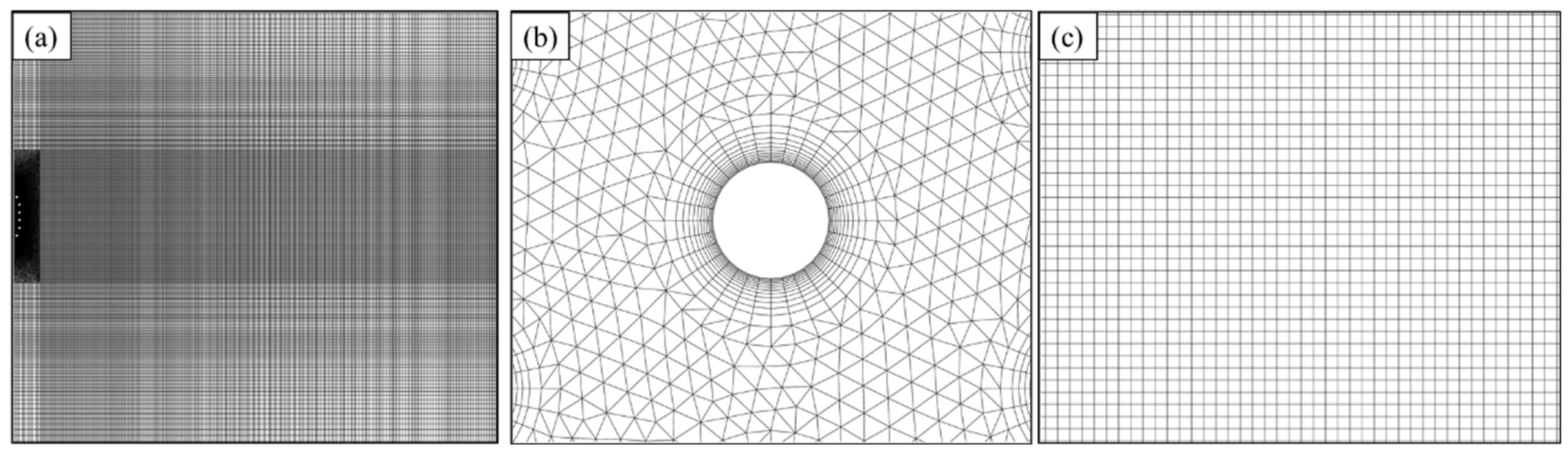
Numerical simulation data of the six turbulence models were collected. The data at the lines
y = 0 and
y = 0.11 m shown in
Figure 1 were statistically analyzed.
Figure 6 and
Figure 7 depict the time-averaged velocity distribution of each example at the two lines for each simulation case in comparison with the experimental data of Zong and Nepf [
3].
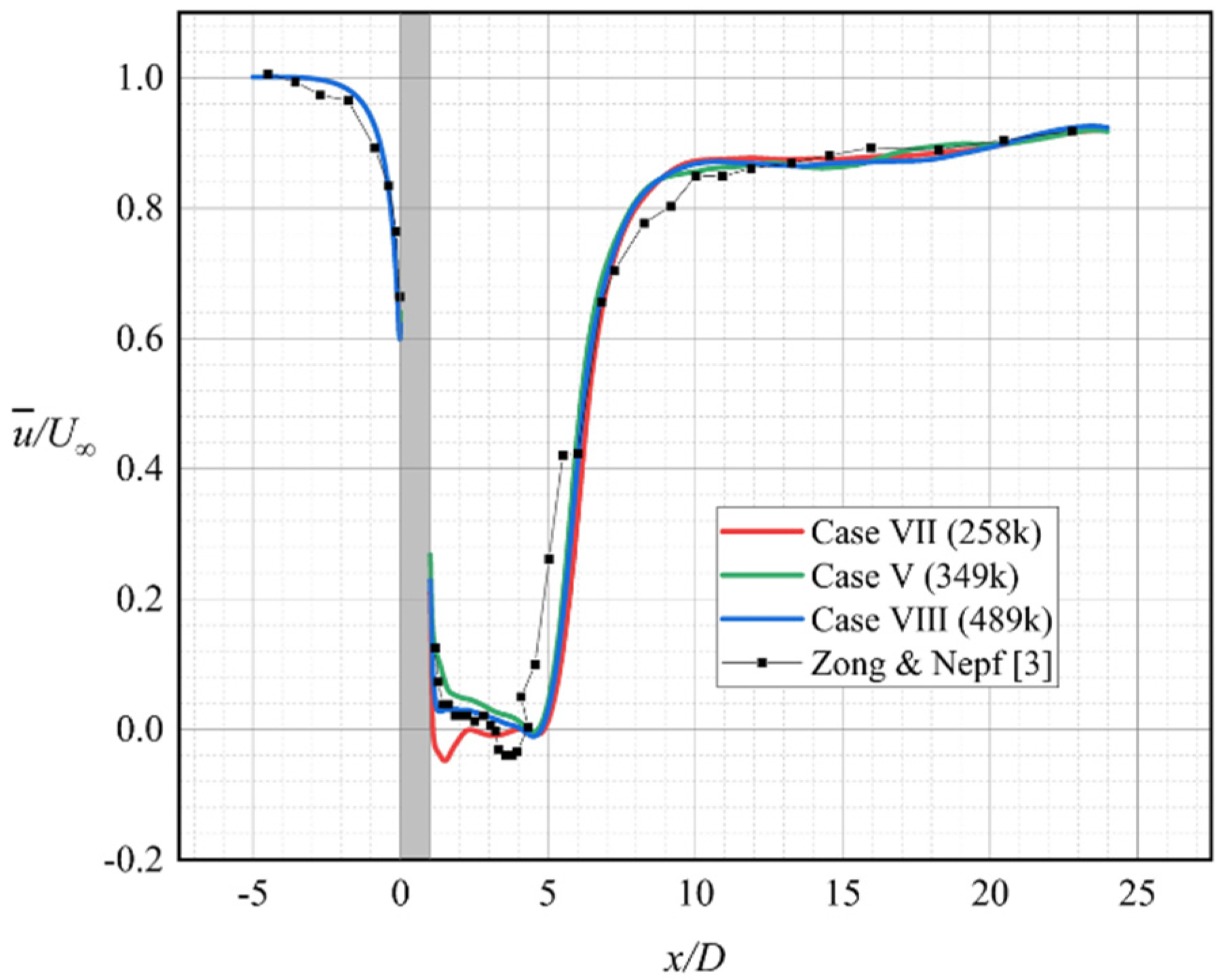
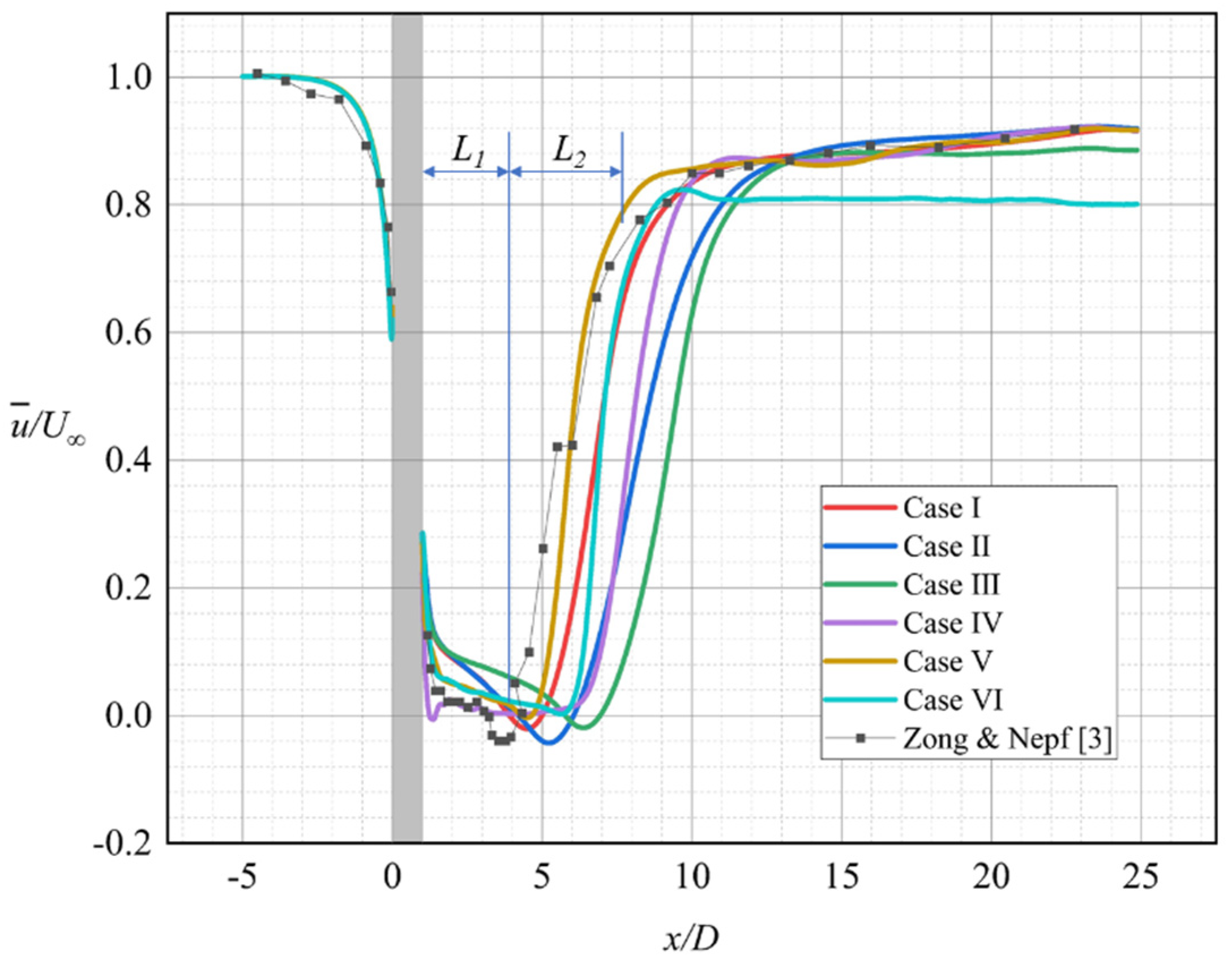
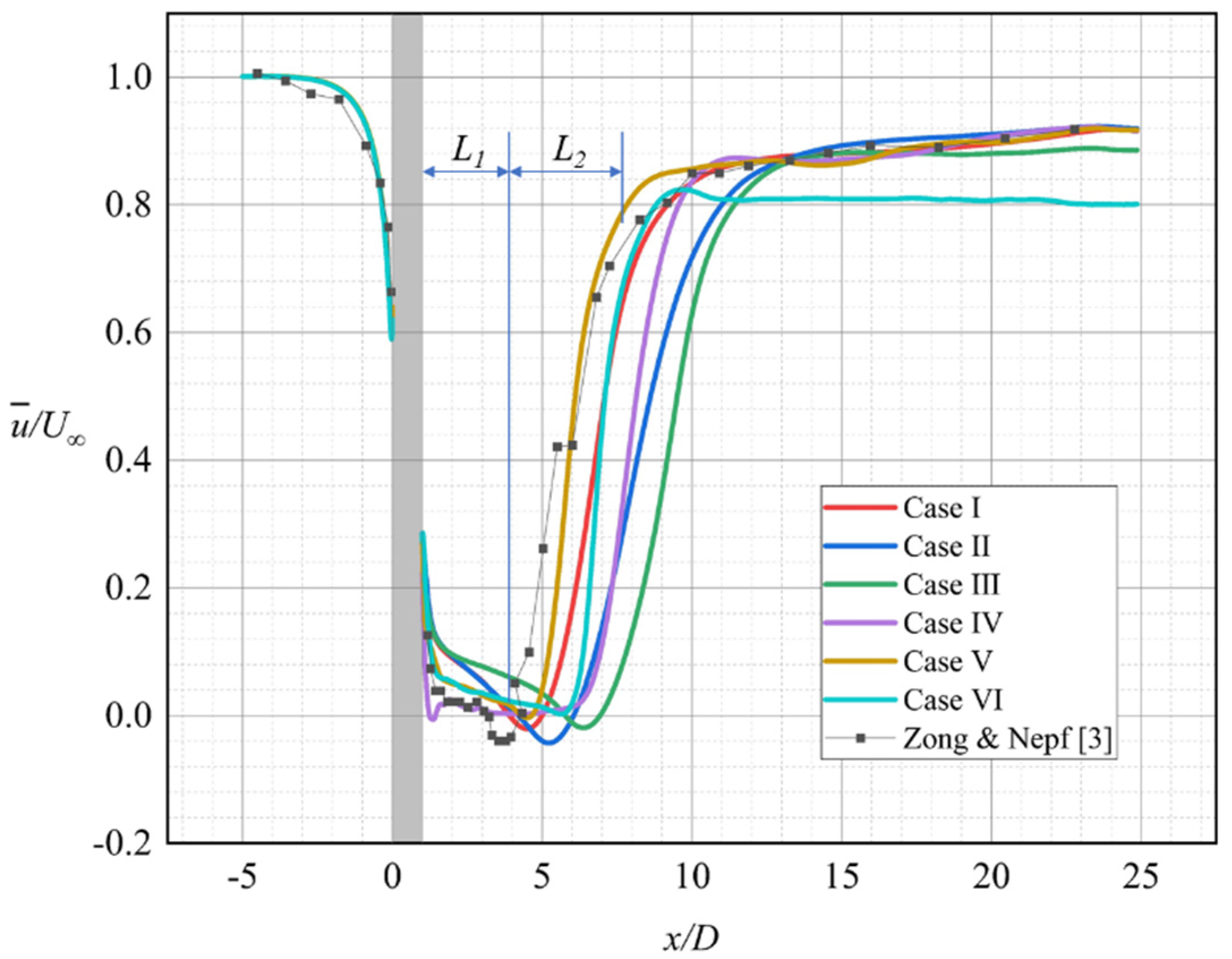
Figure 6 depicts the time-averaged longitudinal flow velocity distribution of the six turbulence models at the wake centerline. On the basis of the experimental results of Zong and Nepf [
3], the results of six numerical simulation examples were consistent with the experimental physical characteristics of laboratory experiments. All six turbulence models were able to simulate reasonable longitudinal mean flow velocity distributions at the centerline, including the stable wake segment and wake recovery segment. The values are shown in
Figure 8.
Figure 6 illustrates that the predictions of the numerical simulations deviated from the experimental data. Case V simulated by the SST
k-
ω model had the simulation results with the least overall deviation from the experimental data. The other five turbulence models had great deviations at different locations. In
Figure 6,
L1 and
L2, respectively, mark the distribution of the mean flow velocity
in the steady wake segment and the wake recovery segment from the experimental data of Zong and Nepf [
3]. The flow velocities in the wake stable segment
L1 simulated by the three turbulence models of the
k-
ε series were remarkably larger than those of the experimental data. In addition to the SST
k-
ω model, the other five turbulence models predicted that the wake recovery segment was highly downstream. Only the realizable
k-
ε model and RSM model poorly predicted the distribution and magnitude of the mean flow velocity
after the wake. Among the six turbulence models, the worst prediction results were provided by the RSM model. The simulation results of the RSM model were unsatisfactory in the wake segment, and the flow velocity prediction after the wake section highly differed from that in the experimental data. The relative velocity of the experimental data at x = 23D is about 0.9, while about 0.8 for RSM. Meanwhile, the numerical simulation results of the standard
k-
ε model were better than those of the RNG
k-
ε model and realizable
k-
ε model. This finding is unexpected because the realizable
k-
ε model shows better performance than the standard
k-
ε model in most previous numerical simulation examples.
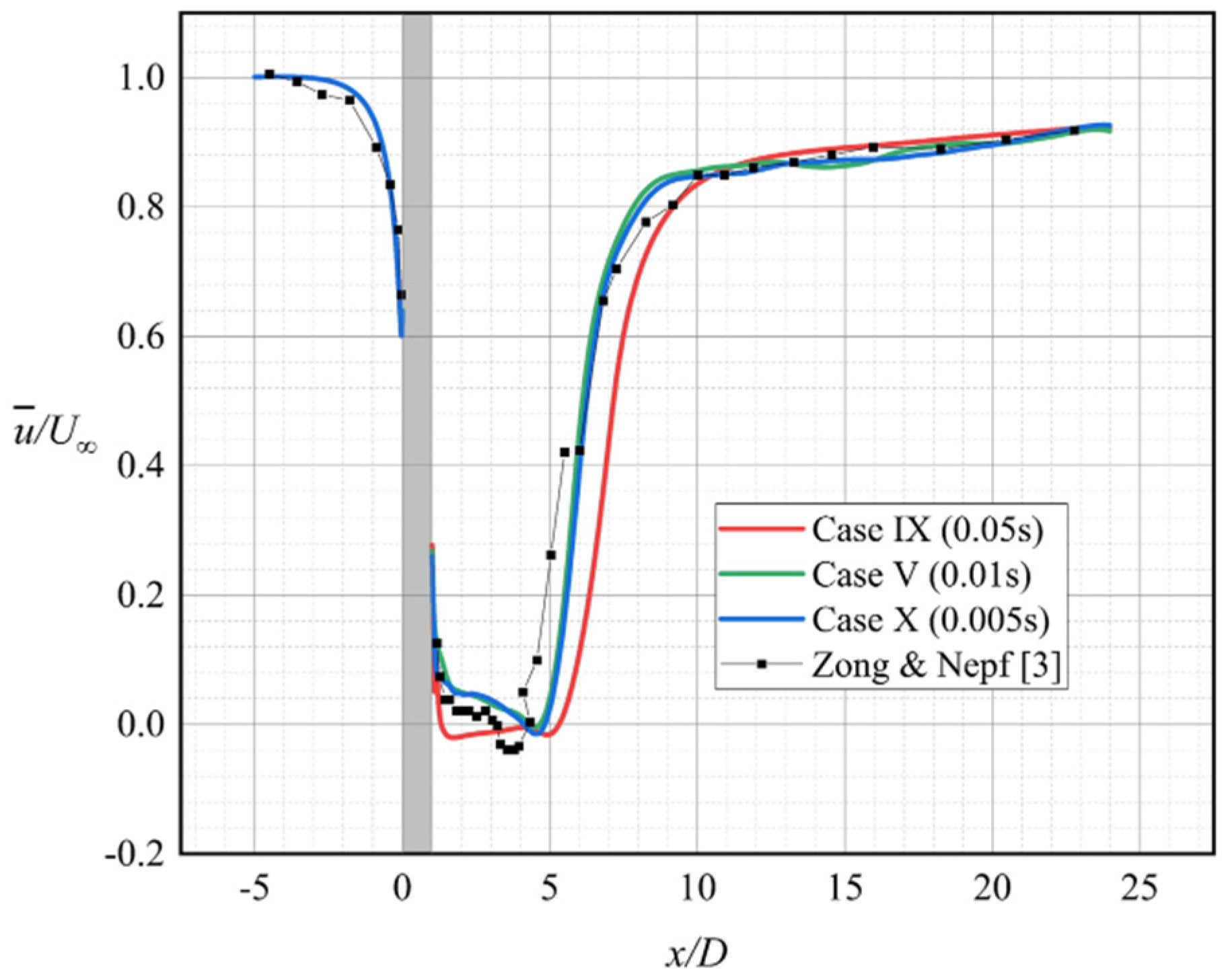
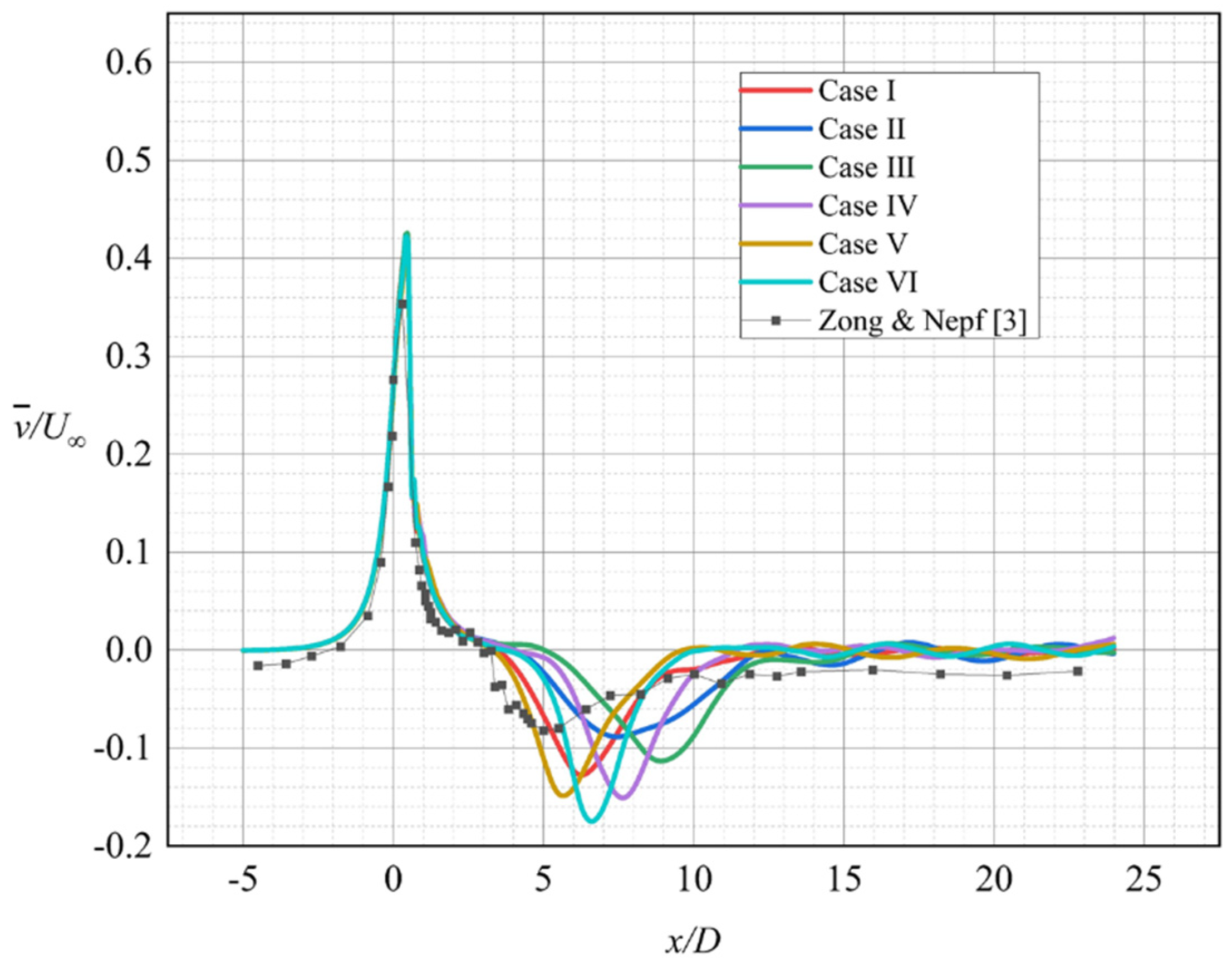
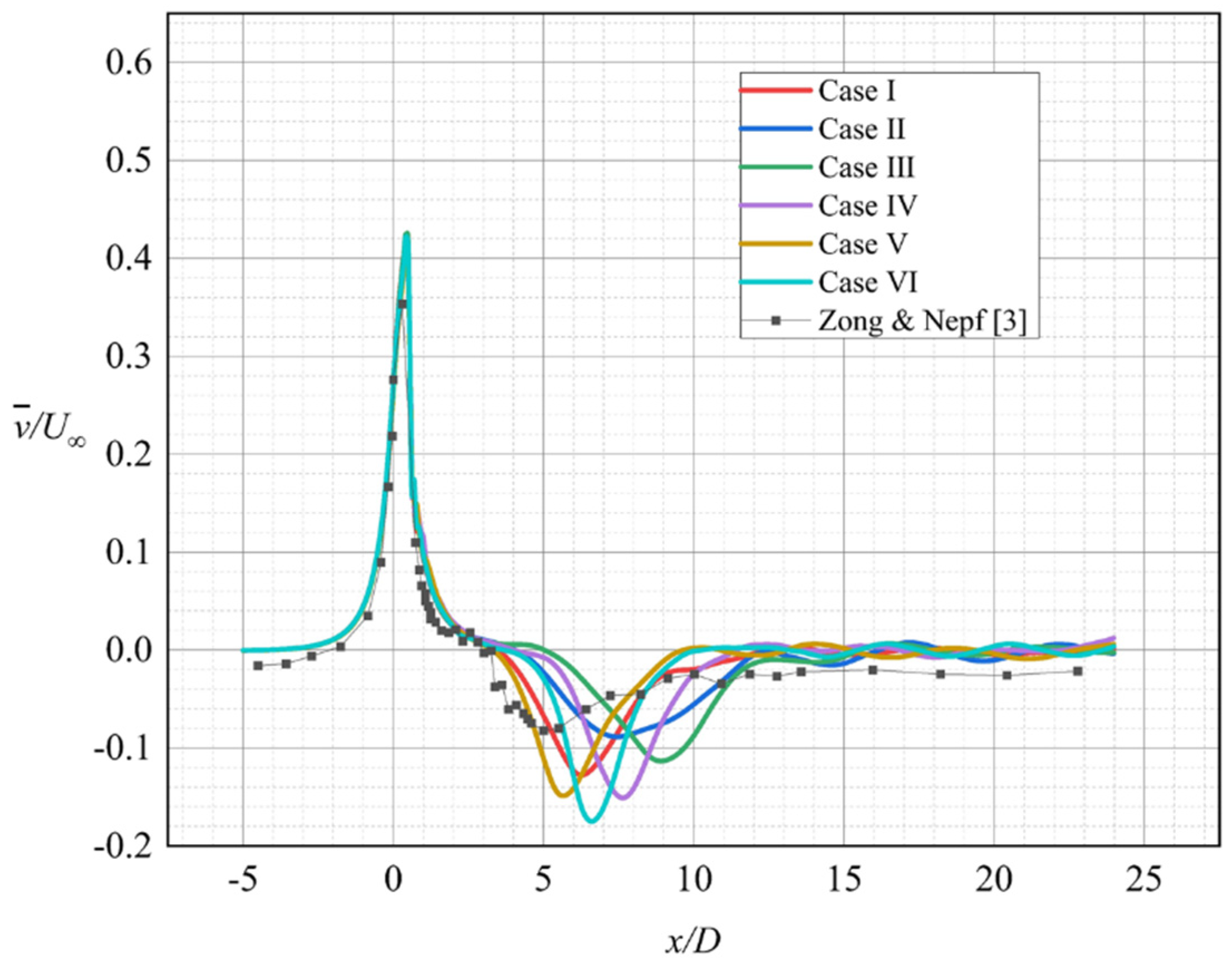
Figure 7 depicts the numerical simulations results of the transverse mean flow velocity
profiles at the line
y =
D/2. Although the six turbulence models were able to correctly represent the physical characteristics consistent with the experiments of Zong and Nepf [
3], they showed varying degrees of deviation in specific values. The minimum position of the transverse mean velocity
at the line
y =
D/2 was more downstream than that in the experimental data. Among the six turbulence models, the SST
k-
ω model simulated the most consistent results with the experimental data but underestimated the minimum value of
. The minimum value of
predicted by the RNG
k-
ε model was consistent with the experimental data of Zong and Nepf [
3], but the location of the minimum value was more downstream. A high recovery rate of the minimum value is associated with a fast shear flow on both sides of the vegetation patch and a short wake recovery segment. On this basis, the predicted length of wake recovery segment by the RSM model was too small.
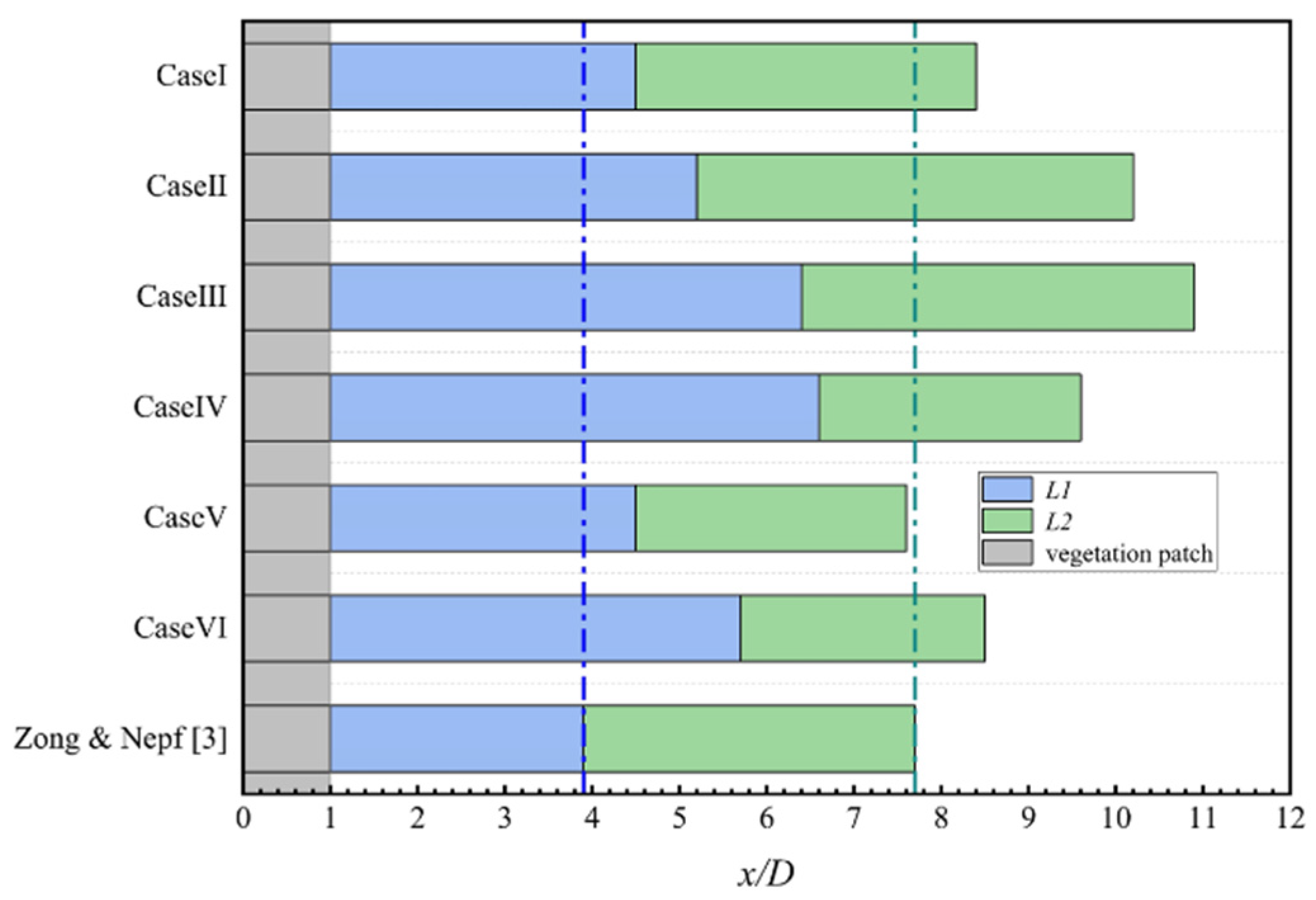
Figure 8 summarizes the numerical simulation results of the wake segment length for the six numerical cases. All of the turbulence models predicted greater length
L for the emerged vegetation patch compared with that in Zong and Nepf experiments [
3] (about 10% to 47.8% excess of the experimental data), except for the prediction results of the SST
k-
ω model that were in good agreement with the experimental data. Among them, the realizable
k-
ε model predicted the highest L value compared to the experimental data, about 47.8% of the experimental data. For the stable wake segment length
L1, the six turbulence models predicted longer values than that obtained from the experiments (about 20.7% to 93.1% excess of the experimental data). For the wake recovery segment length
L2, the simulation results of the standard
k-
ε model were the most consistent with the experimental data (the difference is less than 3% of the experimental data). The predicted
L2 values by the RNG
k-
ε model and realizable
k-
ε model were larger than the experimental values, and the predictions of the standard
k-
ω model, SST
k-
ω model, and RSM model were smaller.
3.2. Simulation Results of Flow Field after Vegetation Patch
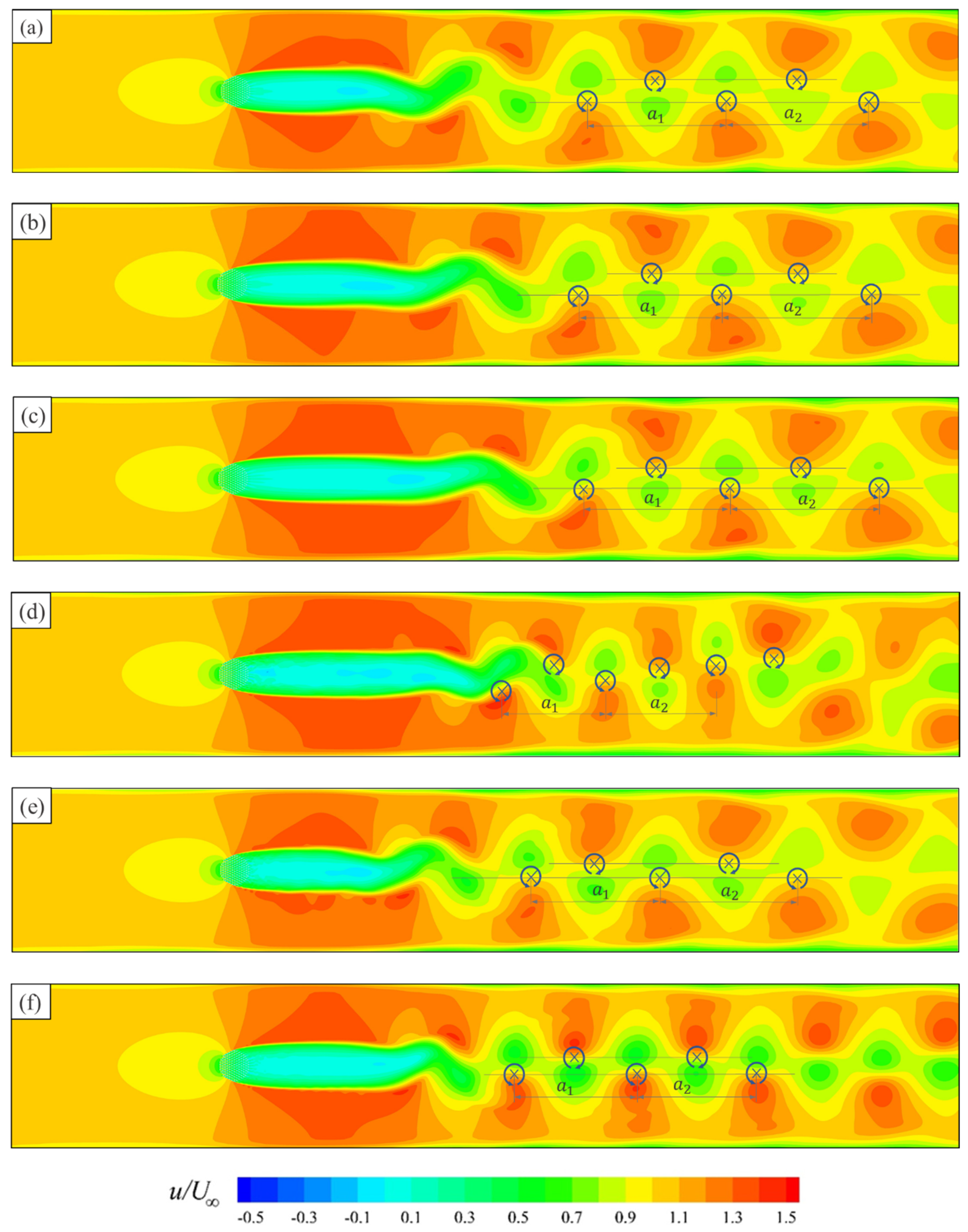
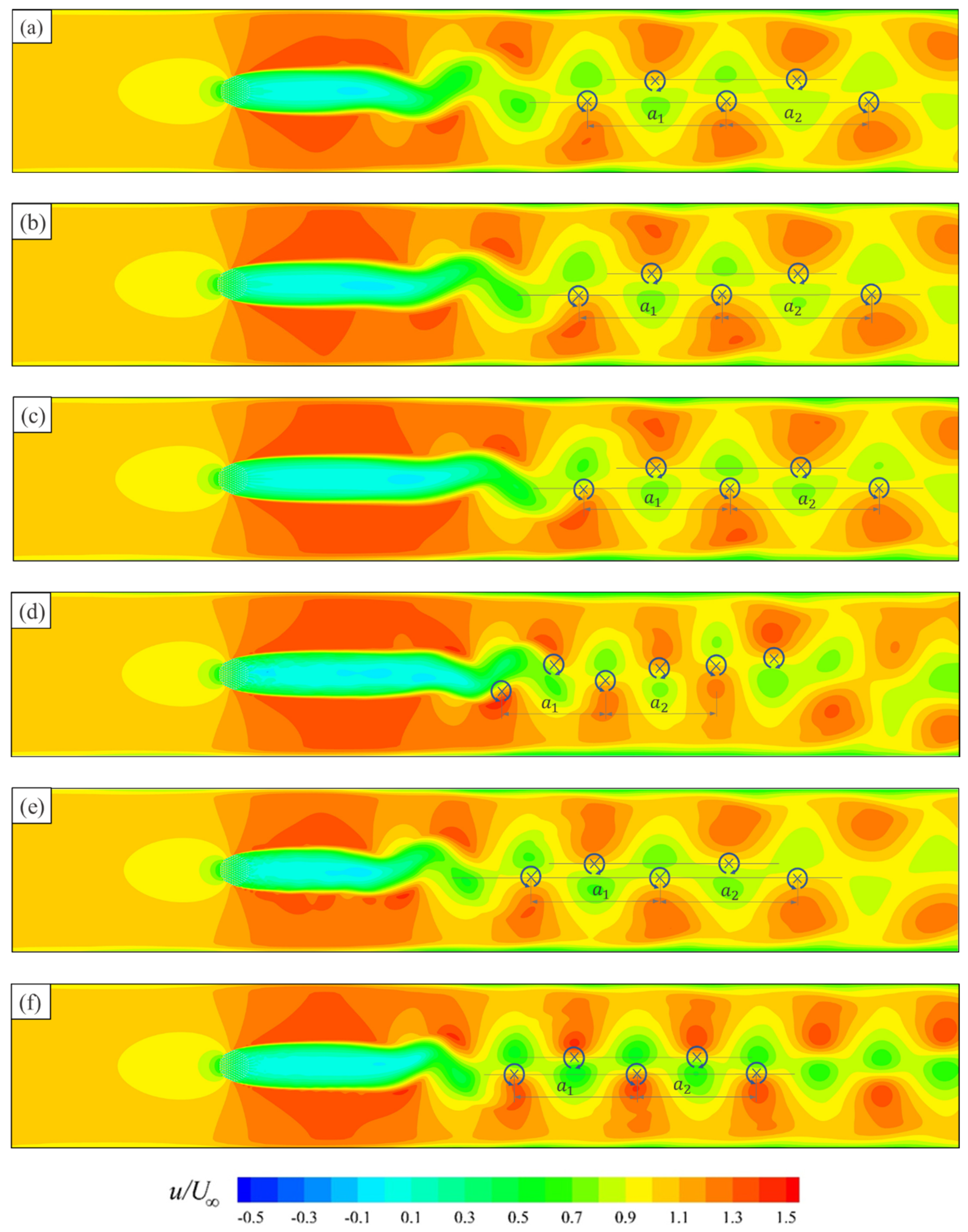
Figure 9 shows the transient velocity distribution contours simulated by the six turbulence models and colored by the longitudinal flow velocity
u. The obstructive effect of an emerged vegetation patch led to the formation of a low flow velocity segment (the wake) behind the vegetation patch, and the flow velocity on both sides of the vegetation patch was increased by the squeezing effect, generating shear layers. The shear layers gradually developed and widened with the flow until the shear layers on both sides interacted, forming Kármán vortex street after the wake region. The distribution of the Kármán vortices street in the contours for each case is marked in
Figure 9. These positions were confirmed based on the flow velocity vector diagram and the
x values for which
v(
x) takes the extremum. The comparison indicates that all of the applied turbulence models were able to make predictions for the two vortex sheets behind the wake. In the calculation domain, all turbulence models did not capture the breakdown of the main vortex street, except the standard
k-
ω model. The simulation by the standard
k-
ω model demonstrated the instability and intermixing of the two vortex sheets behind the wake. Compared with that predicted by the standard
k-
ω model, the main vortex street lengths after the wake predicted by the standard
k-
ε model, RNG
k-
ε model, realizable
k-
ε model, SST
k-
ω model, and RSM model simulations were larger and more stable. The distances between neighboring vortices at the same vortex sheet of the main vortex street are represented by
and
. Here
and
are consecutive, and
is closer to the upstream. In other words,
and
include three consecutive vortices on the same vortex sheet.
and
were averaged to represent the wavelength of the main vortex street for each turbulence model prediction result.
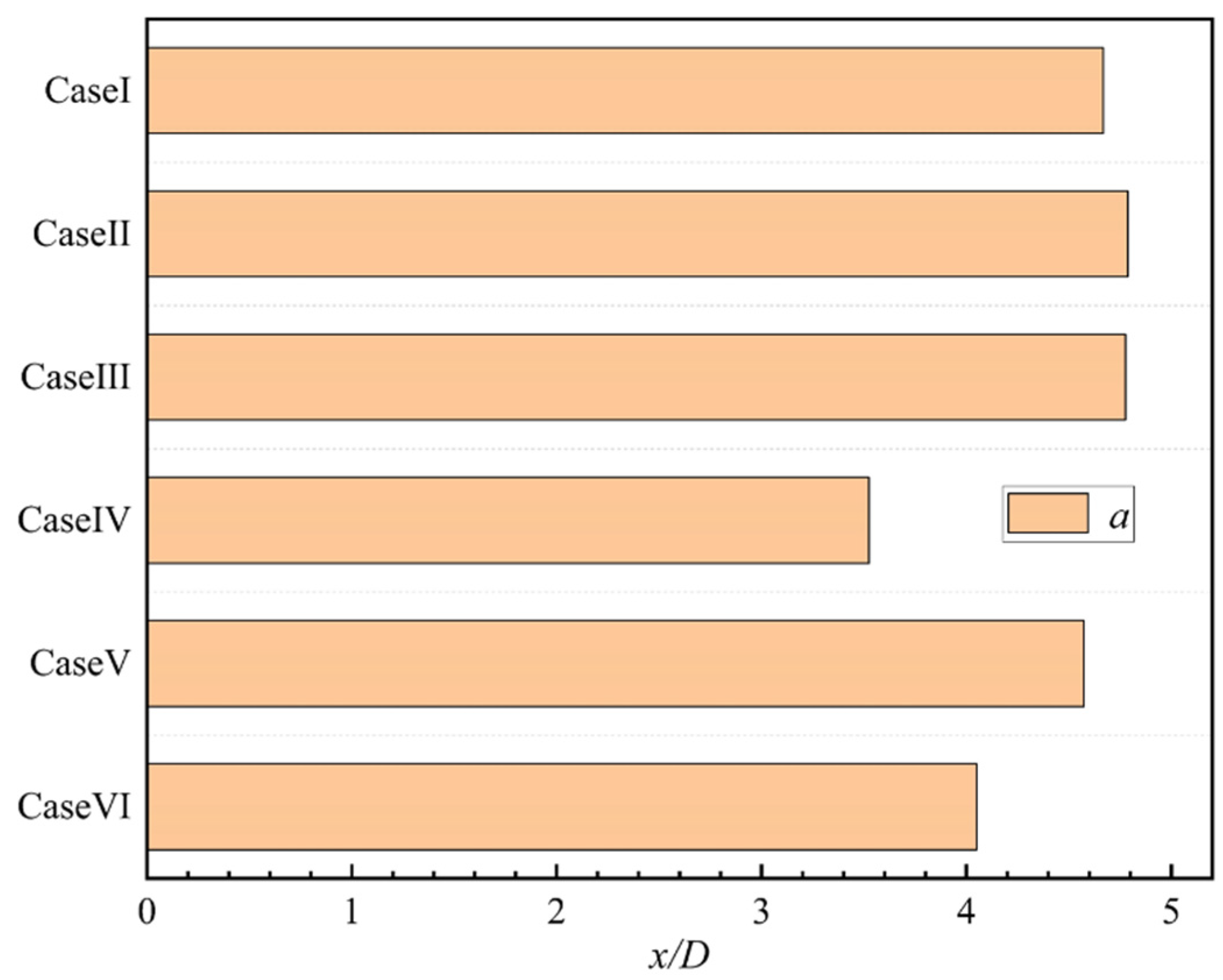
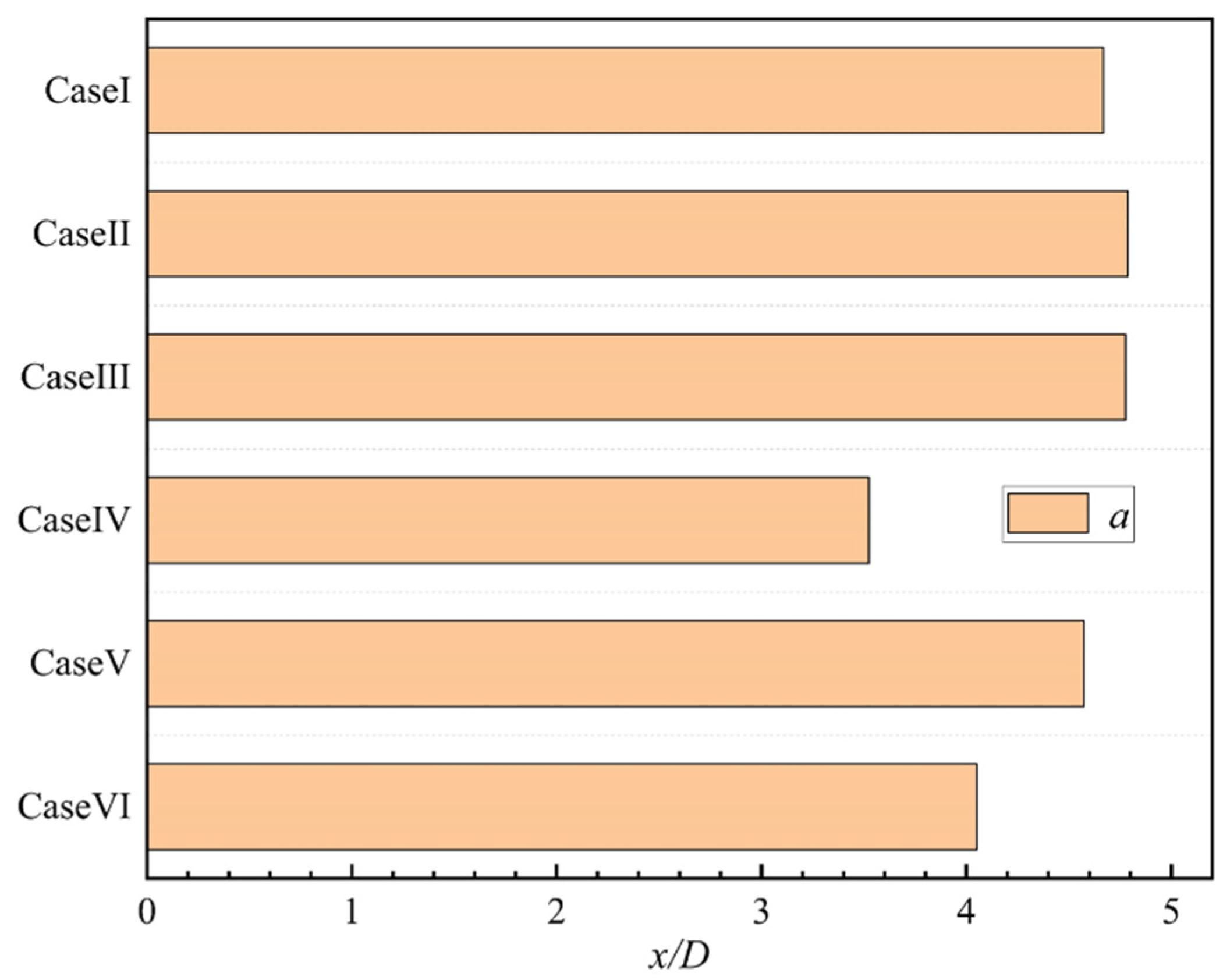
Figure 10 illustrates the comparison of the numerical simulation results of six turbulence models for the wavelength of the main vortex street.
Figure 10 illustrates the wavelength of the main vortex street of the numerical simulation results presented in
Figure 9.
The standard k-ε model, RNG k-ε model, and realizable k-ε model produced relatively consistent prediction results of the main vortex street wavelength after the wake. The difference between the prediction results of the SST k-ω model and the standard k-ε model was extremely small because the calculation of the far-field region of the SST k-ω model was consistent with that of the standard k-ε model. According to the prediction results of the standard k-ω model, its predicted main vortex street wavelength was significantly small. When the wavelength decreases, the velocity fluctuation frequency of the main vortex street increases, corresponding to the smaller vortex shedding frequency behind the vegetation patch.
3.3. Comparative Analysis of Longitudinal Outflow Intensity
The emerged vegetation patch are porous areas, and some of the water flow can form outflows on the sides and back of the patch through the gaps between the plants. The longitudinal outflow in an emerged vegetation patch will form a stable wake segment, a wake recovery section, and a Kármán vortex street behind the vegetation patch. The longitudinal outflow intensity of an emerged vegetation patch is closely related to the diameter
D of the vegetation patch and the vegetation density
[
9]. Therefore, the longitudinal outflow of the simulation results of the six turbulence models can be compared by comparing the transverse distribution of the longitudinal mean flow velocity
behind the vegetation patch. It should be noted that the instantaneous longitudinal velocity distributions in
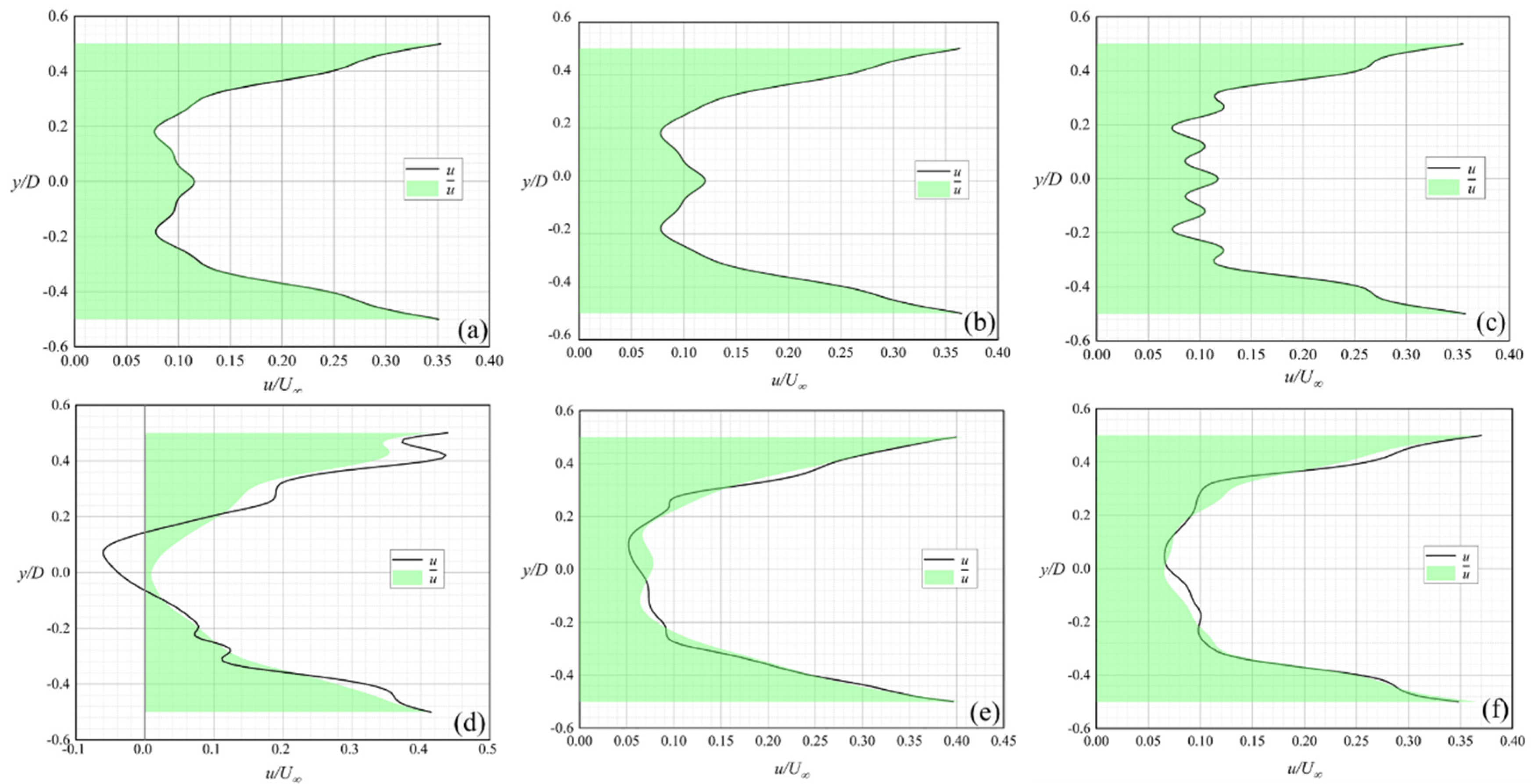
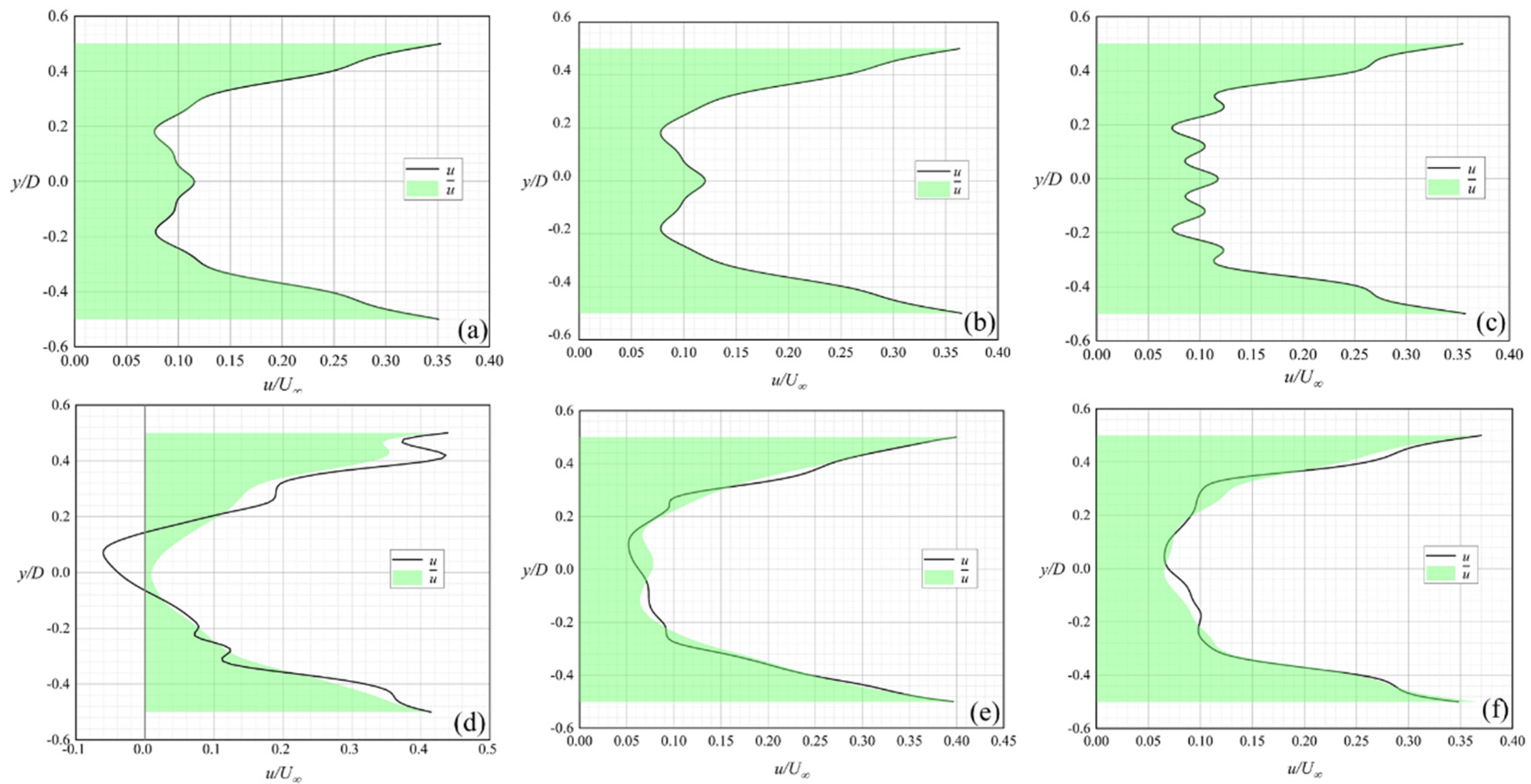
Figure 11 are not at the same time, and there is no need to compare the instantaneous longitudinal velocity distributions of the six turbulence models.
Figure 11 depicts the longitudinal outflow from the numerical simulation results under the six turbulence models. The distributions of flow velocity
u and
at line
x = 1.5
D in the stable wake segment were collected, and the position of the transverse line is marked in
Figure 1. The dimensionless distributions of the mean longitudinal velocity
and the transient longitudinal velocity
u simulated by the six turbulence models were compared, as shown in
Figure 11.
Given that the shear flow on both sides of the emerged vegetation patch gradually developed along the flow direction, the mean flow velocity
and transient flow velocity
u located near
were larger than the flow velocity near the centerline but were not affected by the development of shear flow.
Figure 11a,b shows the good consistency between the simulations of the mean longitudinal outflow at
x = 1.5
D by the standard
k-
ε model and the RNG
k-
ε model. The large overlap between the distributions of the mean flow velocity
and the transient flow velocity
u in
Figure 11a–c indicated the stability in time of the steady wake segment, simulated by the standard
k-
ε model, RNG
k-
ε model, and realizable
k-
ε model. The multiple maximum and minimum values of longitudinal flow velocities in
Figure 11c revealed that the turbulence in the stable wake segment simulated by the realizable
k-
ε model was extremely weak, and the interaction between the longitudinal outflows behind the porous region occurred in the further downstream. In
Figure 11d, the distribution of transient velocity
u had negative values, indicating that the turbulence in the stable wake segment predicted by the standard
k-
ω model was intensive, and reflux can be observed in the segment. The distributions of the mean flow velocity
illustrated in
Figure 11d–f did not match with the distribution of the transient flow velocity
u. This finding indicates that the longitudinal outflow fluctuated in time at line
x = 1.5
D simulated by the standard
k-
ω model, SST
k-
ω model, and RSM model. Therefore, different degrees of turbulence existed in the stable wake segment predicted by these three turbulence models.
3.4. Computational expenses
In the application of numerical simulation, an important concern is the calculation cost. Usually, fast and economical methods will be more widely adopted. For this reason, the calculation demands of the six models relative to the standard k-e model simulation are given in
Table 5. It should be noted that all of the simulations were intentionally conducted on the same computer.
It is worth mentioning that the SST
k-
model obtained the most consistent fluency characteristics with the experimental data of Zong and Nepf [
3] in
Section 3.1. In
Table 5, the relative iteration time of SST
k-
is also the smallest, which means the lowest computational expense. In other words, the SST
k-
model is relatively accurate and efficient under the current research background and conditions.
4. Conclusions
This work mainly investigates the interaction between an emerged vegetation patch and water flow in a straight channel by 2D CFD. A comparative analysis is also conducted on the simulation results of different turbulence models. The interaction between vegetation patches and water flow is extremely sensitive to the diameter and density of the vegetation patch, so the current results are only strictly valid for the current situation [
2]. All six turbulence models currently selected are able to make reasonable simulations and predictions of the flow field with different degrees of accuracy.
In the computational domain, all six turbulence models are able to simulate the shear flow on both sides of the emerged vegetation patch, the wake, and the Kármán vortex street behind the patch. The standard
k-
ε model is able to simulate reasonable and accurate simulation predictions for the current range of flow field characteristics. Moreover, it is better than the RNG
k-
ε model and realizable
k-
ε model in terms of consistency with the experimental data of Zong and Nepf [
3]. The SST
k-
ω model has the best agreement with the experimental data in stimulating the interaction between an emerged vegetation patch and water flow in a straight channel, including the mean longitudinal velocity distribution at the central line, the transverse mean velocity distribution at the line
y =
D/2, length of the wake segment. The standard
k-
ω model and the RSM do not perform well. From the simulation results, the turbulence intensity of RSM, the standard
k-
ω model, and the SST
k-
ω model is stronger than that of the standard
k-
ε model, RNG
k-
ε model, and realizable
k-
ε model. For the prediction of turbulent structure around rigid emerged vegetation by 2D numerical simulation, the SST
k-
ω model can achieve better results than the standard
k-
ε model, RNG
k-
ε model, realizable
k-
ε model, standard
k-
ω model, and Reynolds stress model (RSM). In addition, the SST
k-
ω model has the lowest computational expense in current research.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}