
Research on Parameter Spatialization and Adaptive Correction Models in Fluid Numerical Simulations
1
College of Resources and Environment, Henan University of Economics and Law, No. 180 Jinshui East Road, Zhengzhou 450046, China
2
Academician Workstation for Urban-Rural Spatial Data Mining, Henan University of Economics and Law, No. 180 Jinshui East Road, Zhengzhou 450046, China
Water 2022, 14(17), 2671; https://doi.org/10.3390/w14172671
Submission received: 1 July 2022
/
Revised: 22 August 2022
/
Accepted: 26 August 2022
/
Published: 29 August 2022
(This article belongs to the Section Hydraulics and Hydrodynamics)
Abstract
:Computational fluid dynamics (CFD) numerical simulations play an important role in many research fields, including hydrological basins, rivers, floods, and dam breaks. Currently, much research mainly pursues accuracy, efficiency, scale, dimensions, etc. In most models, the influencing parameters are adjusted manually, and only one constant is designed in a calculation area, resulting in a lack of heterogeneity in the variable space. In this article, using the idea of spatial interpolation by designing some control points along the river, a spatial design of the Manning coefficient is proposed in the CFD numerical simulation, and an adaptive correction model considering the different correction logic is researched to calibrate the model. Finally, the model is proven to be correct and effective, and it is converged with the Malpasset Dam-breaking case. It can help reduce the artificial calibration and improve simulation accuracy by designing the spatial adaptive correction parameter.
1. Introduction
Every year, many safety issues are caused by flood disasters in the world. Therefore, accurate and rapid computational fluid dynamics (CFD) numerical simulations have become the pursuit of computing practitioners and scholars. Currently, researchers mainly focus on accuracy, efficiency, scale, dimensions, etc. [1,2]. In the field of CFD, there are two main classes of approaches typically used: the mesh-based approach and the particle-based approach. They are usually designed with the shallow water equations (SWEs) in the two-dimensional (2D) case and the Navier–Stokes equations in the three-dimensional (3D) case. As the mathematical models that describe these physical systems often come in the form of partial differential equations (PDEs) represented in a discretized form in computers, the loss of information in a numerical simulation is inevitable [3]. Therefore, in order to improve the simulation accuracy, some scholars have studied various numerical schemes in the solving method. The discrete methods mainly include the finite difference method (FDM), the finite volume method (FVM), and the finite element method (FEM) [4]. The widely used schemes include Godunov-type schemes [5,6,7], Roe-type schemes [8], flux vector splitting (FVS) schemes, AUSM-type schemes, HLL-type schemes [9] with the Riemann solver [10,11,12], and the Galerkin method [13,14,15]. For model modification, scholars mainly research several aspects: pressure correction, mesh correction [16], and coefficient calibration [17]. The methods for pressure correction include the SIMPLE [18] (semi-implicit method for pressure-linked equations) algorithm and other improved methods, such as the SIMPLER (SIMPLE Revised) algorithm, SIMPLEC algorithm (SIMPLE Consistent), and pressure implicit with splitting of operators (PISO) algorithm [19,20]. In addition, some modeling rules have been proposed to ensure the reliability of the models [21,22].
For the CFD calibration work, even though it has been extensively researched, the reliability of the results remains a key concern when performing CFD simulations [23,24]. It is not easy to obtain a reliable result due to the high computational cost and tedious calibration work. The current calibration work is mainly based on existing statistical data, using empirical formulas or adaptive learning to adjust parameters [25,26,27]. The input parameters include the boundary condition parameters and some model parameters. The current CFD calibration work mainly focused on how to select the proper CFD models and how to find the optimal input parameters. To produce reliable results, we need to adjust the input parameters to amend the agreement between the simulated results and the corresponding experimental data [23,26]. Tens to hundreds of simulation runs are required for the calibration process of finding acceptable input parameters. All the calibration work is very computationally expensive and time-consuming [23]. Therefore, some intelligent algorithms are being researched to improve the calibration work. For example, Azamathulla used machine learning technology to train and learn the budget model of the Manning coefficient and finally obtained an estimate of the Manning coefficient suitable for high-gradient flow [28]. The model is mainly based on the historical Manning coefficient records for neural network training.
While many parameter calibration methods have been used in distributed hydrological systems [29], most were still carried out manually with limited spatial points. In CFD numerical simulation models, scholars usually look for some parameters that make the simulation effect best match reality [26]. The Manning coefficient is used in most simulation systems as the operating parameter, and its optimization process usually depends on manual work. When repeatedly revised according to the experimental results for satisfaction, it undoubtedly increases the workload of manual model modification. In addition, the current model simulation lacks design considerations of the spatial heterogeneity information of the Manning coefficient. Usually, a single Manning coefficient value is used in the entire numerical simulation [4,30]. In addition, simulations using established software such as DHI MIKE and HEC-RAS are also faced with the tedious task of manually determining the Manning coefficients. Therefore, it is of great interest to research how to automate the calibration of the Manning coefficients.
The objective of this paper is to propose a new method based on adaptive correction, designed with the Manning coefficient as the correction target. First, the Manning coefficient is spatially designed, and then, the corresponding adaptive correction method is proposed. Finally, the Malpasset Dam-breaking case is used for experimental verification. The structure of this paper is as follows. The second part is the modeling research, which mainly includes the spatial design of the Manning coefficient and the adaptive adjustment design of parameters; the third part is the experimental verification, including data description, verification of experimental design, and analysis of the result; the last part is the experimental conclusion.
2. Materials and Methods
2.1. Study Area
The models were researched with the Malpasset Dam break, a real flood event that caused 439 casualties in France. The Malpasset Dam was located in the Reyran River Basin in the Val department in southeastern France, 14 km from an estuary. The dam-breaking event occurred at approximately 21:10 on 2 December 1959, and a flood peak of approximately 40 m caused a large flood disaster downstream, with the flood lasting approximately 20 min [31]. After decades of research, scholars have collected and organized a wealth of experimental data on the topography and process of the Malpasset Dam failure; as a consequence, this has become a benchmark study in the relevant literature [32,33,34].
2.1.1. Data Introduction
DEM (Digital Elevation Model)
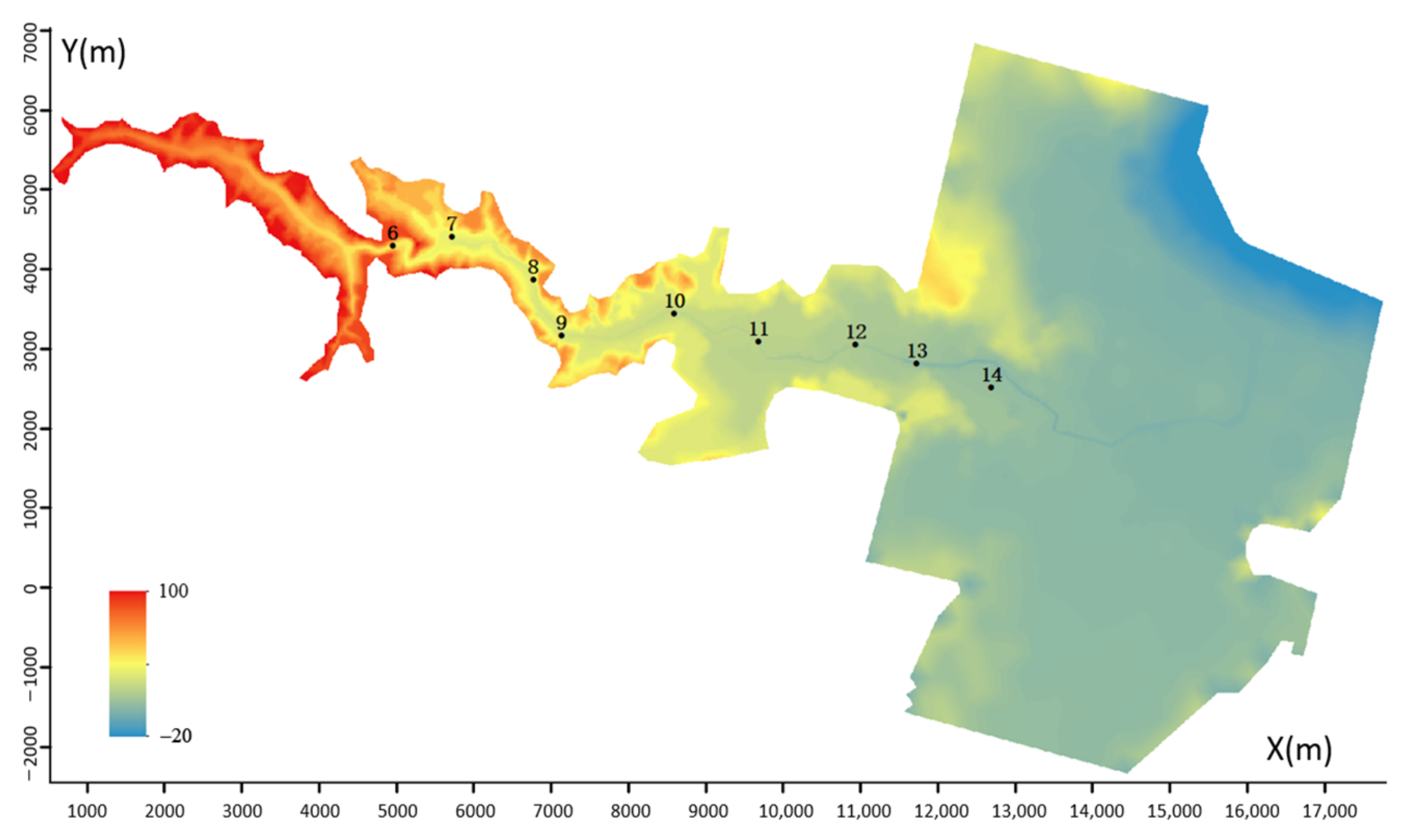
The terrain data were obtained from the verification use case of the software openTelemac and included 53,081 elevation points. It was necessary to generate a DEM from these data. These elevation point data were processed through ArcGIS Desktop software and finally a DEM with a resolution of 10 m was generated (see Figure 1). The Malpasset Dam break has been successfully simulated without morphologic change considerations by many scholars [35]. Therefore, this modeling exercise will not consider morphologic change either.
Initial data
The Malpasset Dam was considered a straight line between the coordinate points (4701.18, 4134.41) and (4655.5, 4392.10). The water level in the reservoir (i.e., upstream of the dam) was initially 100 m, and the remaining downstream valleys were considered waterless [36].
Verification Data
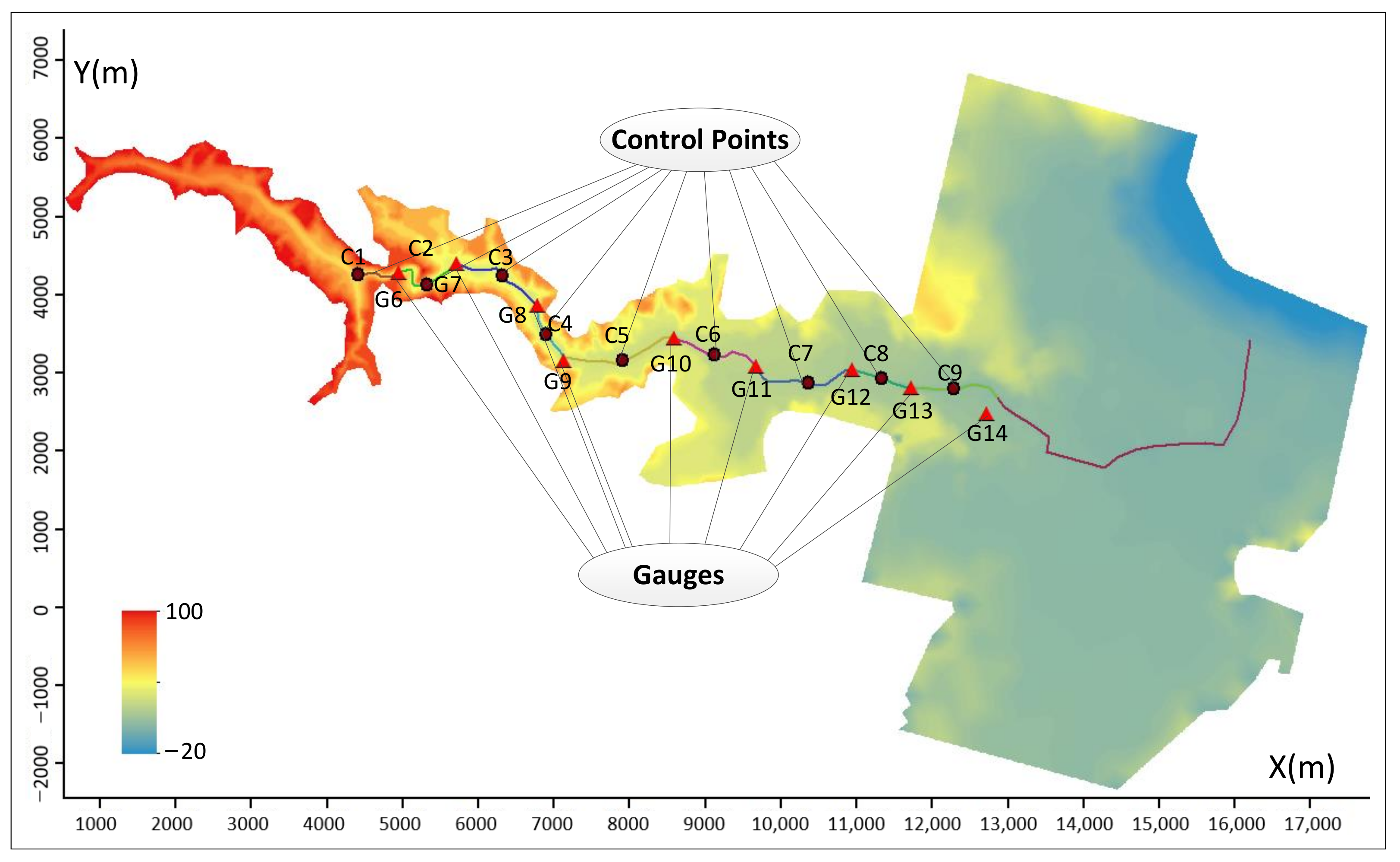
In 1964, a 1:400 physical model was built to study this historic dam-breaking event by Electricite de France (EDF) [36,37]. In this physical model, the EDF laboratory set up 14 gauges to measure the arrival time and depth of downstream floods. A total of 9 gauges were placed on the river centerline, the first 5 being in the reservoir itself. The maximum free surface elevation and front arrival time at these gauges have been measured in this physical model. Since the experimental data of 9 gauges on the river centerline were used by many scholars [32,35,38] for verification experiments and rich experimental results were obtained, these data were also selected for verification in this paper. In Figure 1, the gauges are labeled from 6 to 14, and some of their information is shown in Table 1.
2.2. Model and Methods
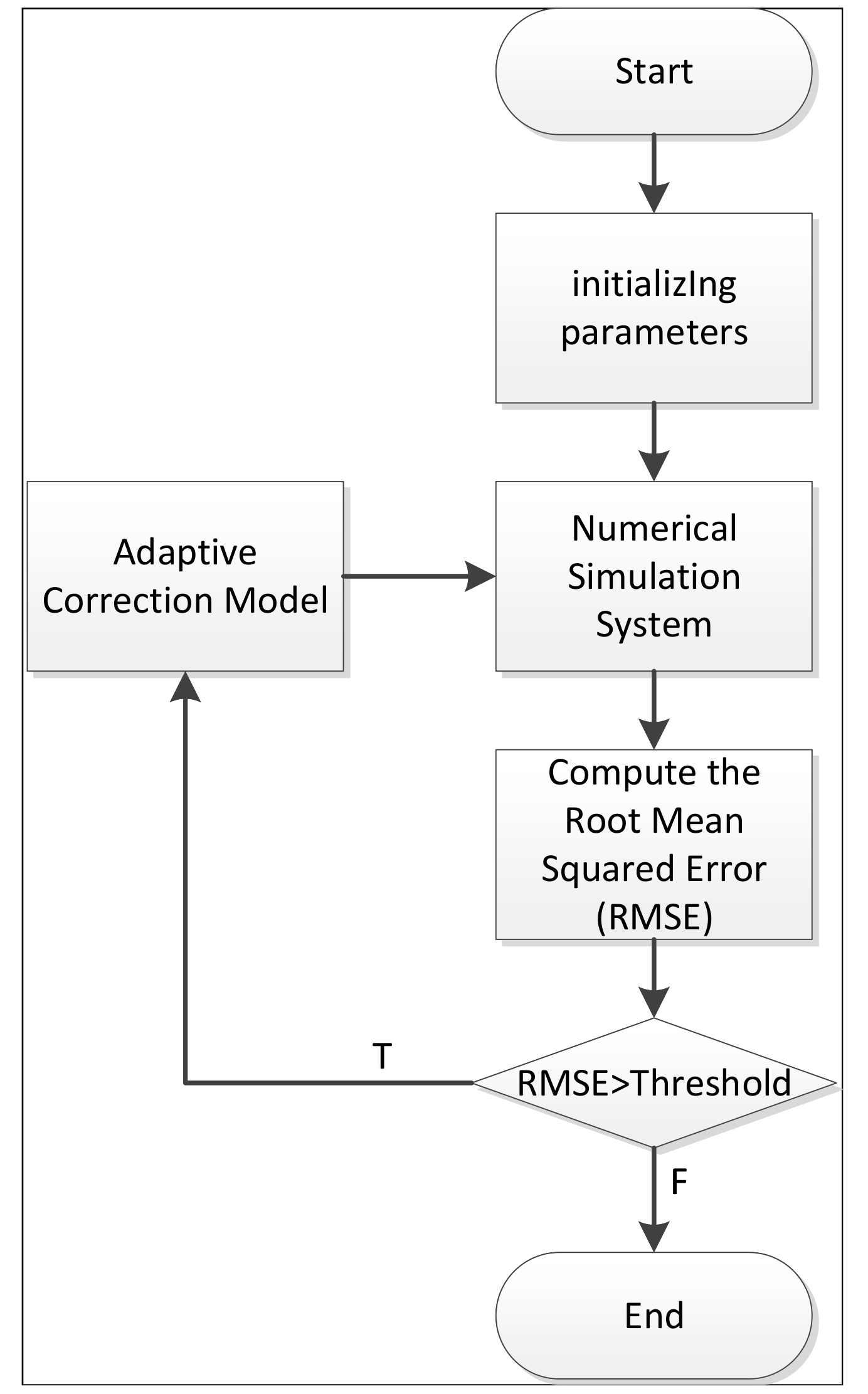
A flow chart of the methodology is shown in Figure 2. First, the system initializes the relevant data of the simulation area and then performs numerical simulations to obtain the simulation results of each gauge. After the first simulation is finished, the errors between the simulation results and the real values are calculated. If the root-mean-square error (RMSE) is larger than the threshold, the errors are passed into the adaptive system to adjust the parameters, and numerical simulation is performed again until the RMSE is smaller than the threshold.
Our research mainly focuses on two parts of the flowchart:
- The spatial design of the Manning coefficient of the numerical simulation model in the calculation area;
- The logic of the adaptive adjustment of the Manning coefficient.
2.2.1. Numerical Simulation Model
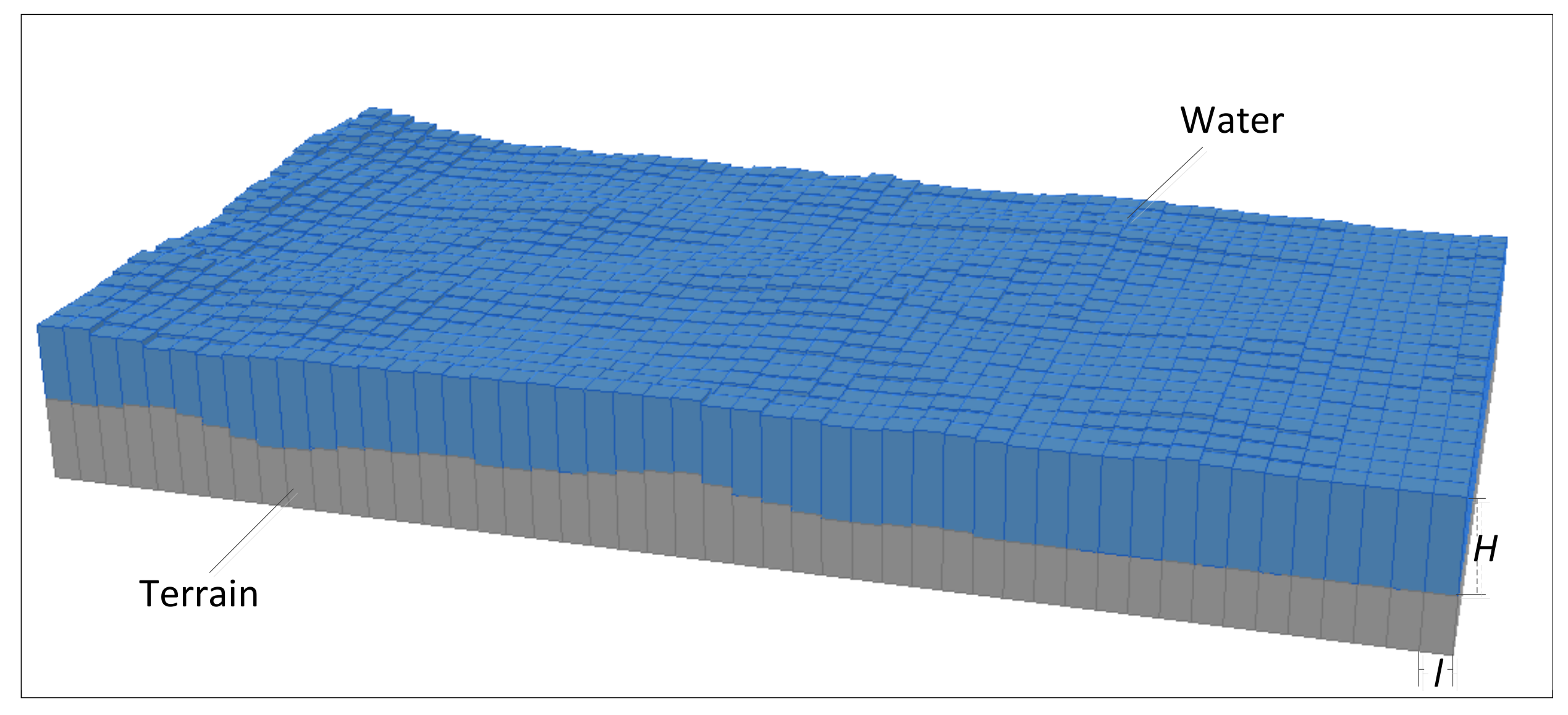
The CFD models are categorized into grid-based models, particle-based models, and hybrid-based models. This article mainly uses the short-lived water cuboid particle model proposed by the author, which is a type of hybrid-based model (Figure 3 shows the concept map of water division). For details, please refer to the paper [4]. The main governing equations are as follows:
where the mass of the particles , u and v, respectively, are the values of the velocity in the direction of x and y, g is the gravitational constant, H is the depth of the water cuboid particle, l is the cell size of the grid, and are the components of the force on the east and west sides of the particle in the x-direction, respectively, and and are the components of the force on the north and south sides of the particle in the y-direction, respectively.
2.2.2. Spatialized Design of the Manning Coefficient
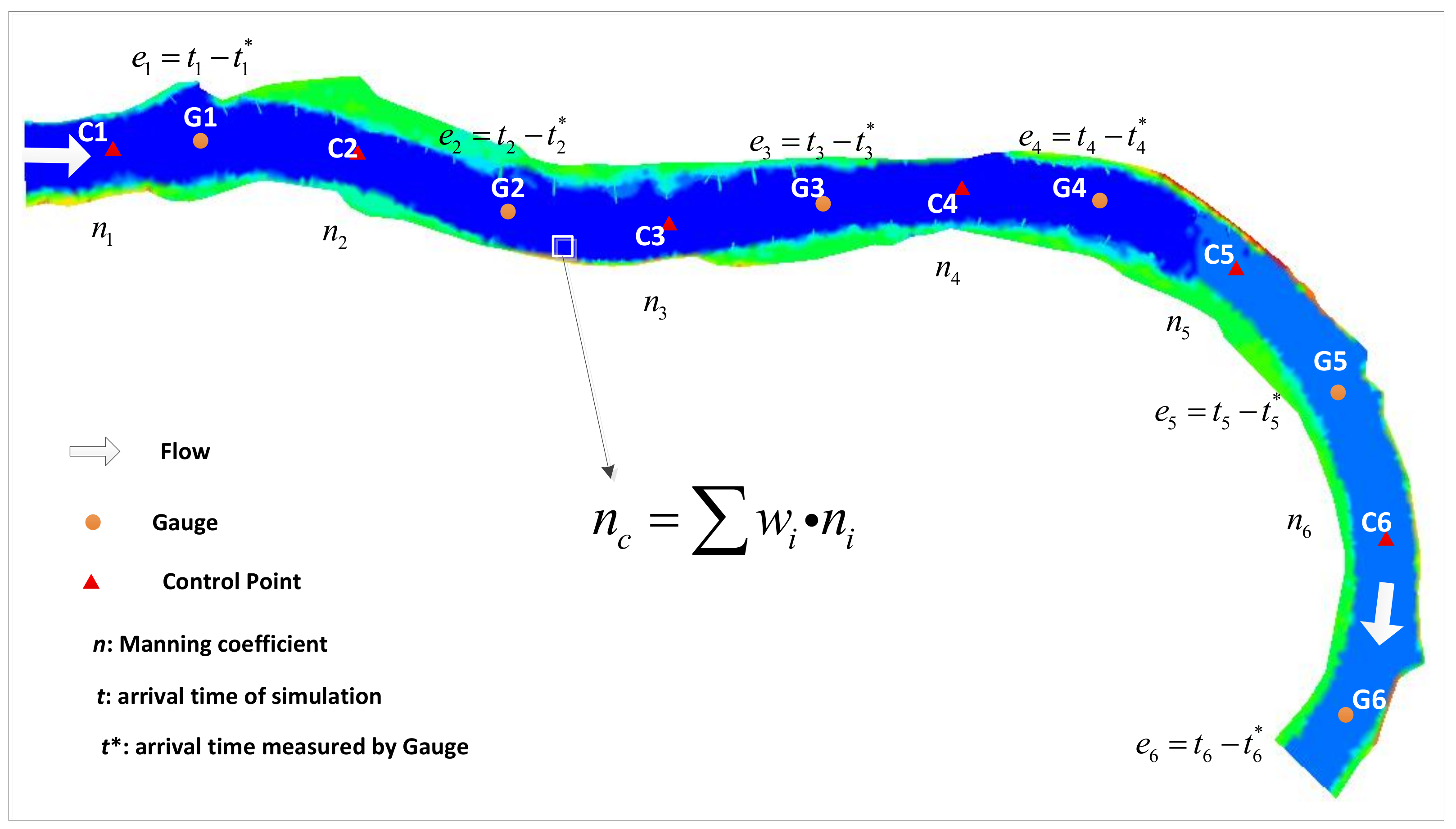
Spatial distribution is implemented instead of a constant value of the Manning coefficient in multiple cross sections of the river along its path, aiming to optimize the effect of these coefficients in the final simulation. The spatialized design of the Manning coefficient for the entire calculation area is shown in Figure 4:
In Figure 4, the specific control points of the Manning coefficient are set in the calculation area. The Manning coefficient at any point in the computational region is obtained by interpolation of the control points, expressing the spatial distribution. The gauges are used to obtain the simulation results at the corresponding positions, so as to calculate the simulation error and correct the Manning coefficient corresponding to each control point. If the control points are placed at the location of the gauges, due to the spatial interpolation, adjusting the Manning coefficient of the control point will have a greater impact on the Manning coefficient upstream and downstream of the gauge, which is not conducive to adaptive control design. Therefore, the control points are placed among the gauges, thus reducing the control coupling between the gauges and facilitating the adaptive correction design. The Manning coefficient of the currently calculated mesh can be calculated by the following formula:
where, according to the first law of geography, the closer the space is, the more similar it is. The inverse distance weight (IDW) is used for the interpolation calculation. is the value of IDW for the control point i, d is the Euler distance between the grid and each control point, k is the exponent, and the value is set to 2 here.
2.2.3. Cost Function
The cost function is widely used in the field of adaptive systems and machine learning. It is mainly used to show the bias between simulated and real values during the training process of the system, and is often employed to analyze the process of adaptive correction. Cost functions can be of various types depending on the problem, including mean absolute error (MAE), mean squared error (MSE), root-mean-square error (RMSE), etc. Here, the RMSE is used as the cost function and is also used to evaluate the accuracy. The smaller the RMSE is, the better the accuracy is. The RMSE calculation formula is as follows:
where, represents the actual fluid arrival time from the entrance to the gauge; correspondingly, both t and represent the arrival time of gauge in the numerical simulation for the current matrix of Manning coefficients .
Next, we analyze the relationship between the RMSE and Manning coefficient , that is, how to use the time errors of the numerical simulation to adjust to minimize the RMSE.
2.2.4. Adaptive Correction Model
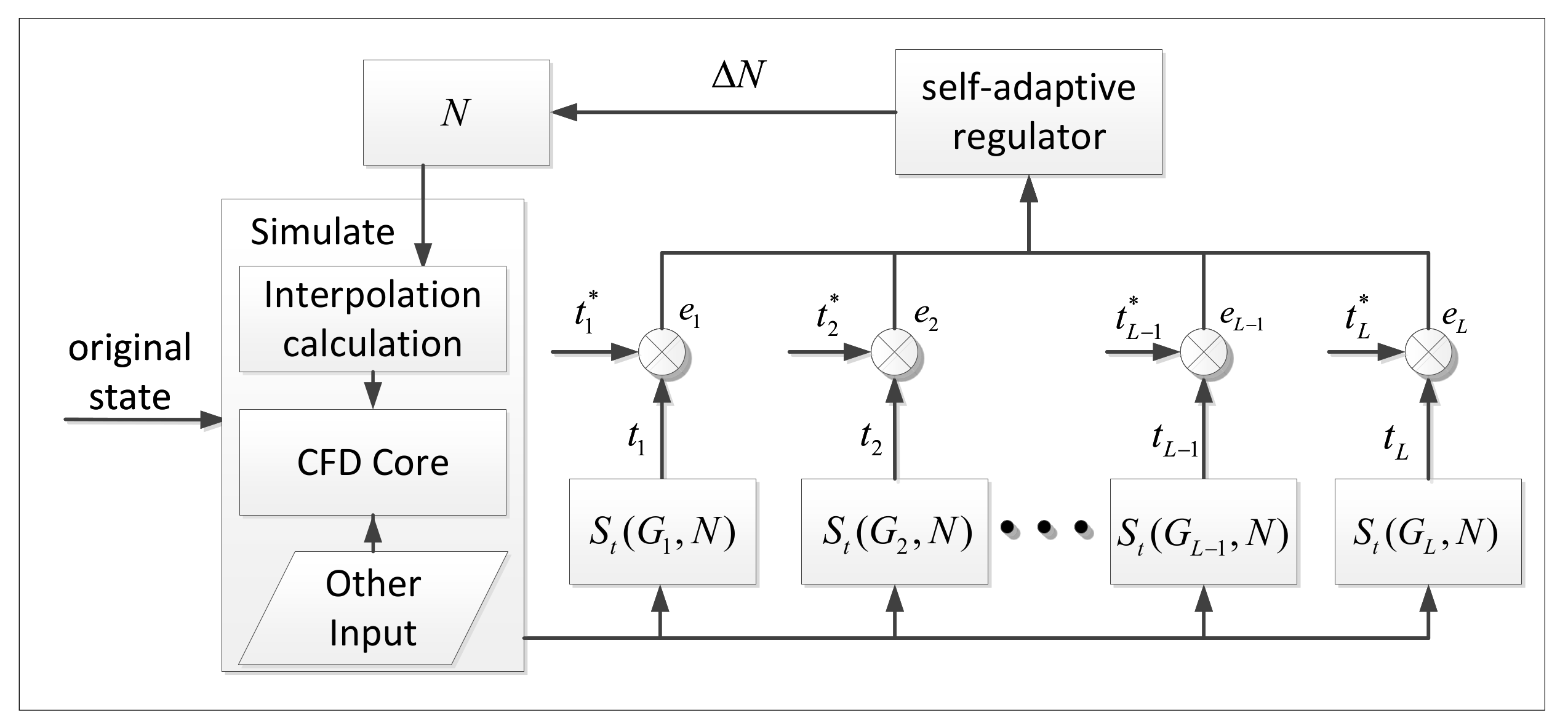
After the spatial design and computational modeling of the Manning coefficient, this section mainly introduces how to use the simulation errors for iterative adaptive correction. The model can be described by means of an adaptive control system, as shown in Figure 5. The system mainly includes a simulation module, time output module for each gauge, error calculation module, self-adaptive regulator module, and Manning coefficient update module. The simulation module mainly contains the Manning coefficient interpolation calculation sub-module and the CFD core sub-module. First, the initial parameters (including the Manning coefficient of each control point) are input to the simulation module, and the Manning coefficients enter the CFD core module through interpolation calculation; second, after simulation calculation, the time of water flow arriving at each gauge is obtained through the time output module; third, the Manning coefficient correction value of each control point is obtained through the error calculation and adaptive correction rule module; finally, the Manning coefficient of each control point is obtained through the Manning coefficient update module, and such adjustment iterations are repeated until the accuracy requirement is satisfied.
Because the water flows from upstream to downstream, there is a sequence of time for the water to reach each gauge. Adjusting the upstream Manning coefficient will result in a change in flow velocity, and therefore affect the time it takes for the water to reach the downstream. Therefore, the adjustment of the Manning coefficient cannot be based solely on the single time error and a single control point. In addition, there is a reasonable range of Manning coefficients for practical applications . To enhance the independence and improve the efficiency of the adjustment on the Manning coefficient for each control point, the following adjustment rules are proposed:
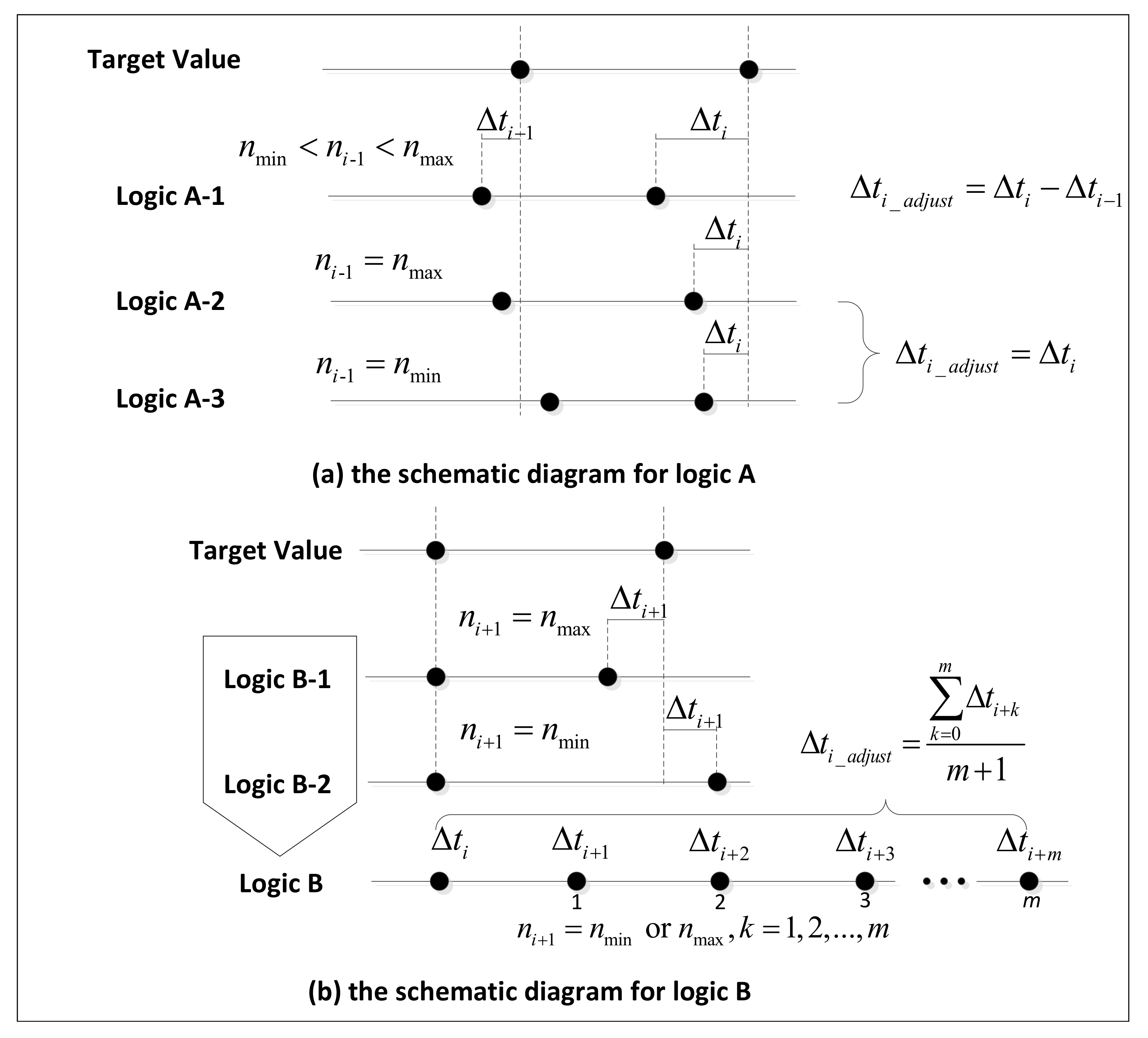
Logic-A
As shown in Figure 6a, if the former Manning coefficient is still in the specified range (), the time correction for the current Manning coefficient should be the current error minus the upstream neighboring time error , using the remaining error to correct for reducing the correction coupling between them:
When the former Manning coefficient reaches an extreme value, it still cannot complete the upstream correction ( or ); then, the correction time error for adjusting the current Manning coefficient should be the current error :
Logic-B
As shown in Figure 6b, if the latter Manning coefficient cannot complete the correction at the extreme value ( or , ; m is the maximum value that makes the condition satisfied), the current time error and the latter time errors are considered as a whole, and the unfinished correction is redistributed to minimize the RMSE. If the Manning coefficients downstream reach the extreme value without reaching the target, the correction time error is computed as follows:
2.2.5. Adaptive Correction Function
After applying the correction logic described above, we obtain a time error for adjusting the Manning coefficient. The adaptive correction function of the Manning coefficient is as follows:
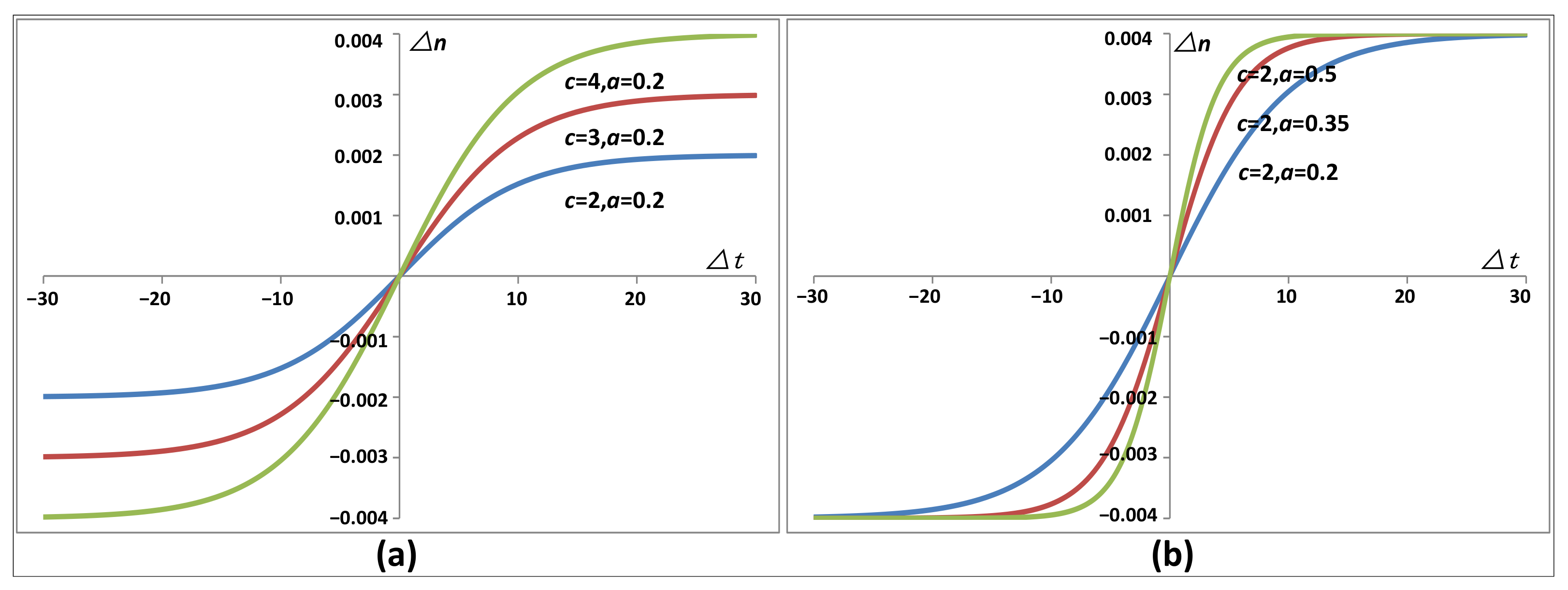
where is the Manning coefficient matrix for the k-th iteration, is the normalization function, which normalizes the time error to correct the Manning coefficient, is the time correction matrix for the k−1st iteration, and c is the relaxation factor. On the one hand, the movement time of the fluid is proportional to the Manning coefficient; that is, the larger the Manning coefficient is, the slower the water flows and the more time the fluid takes to arrive at the gauge. In this paper, the tanh function is selected as the normalization function. On the other hand, as the value of the Manning coefficient is usually in the range [0.01, 0.1], the correction value of each time should start at the thousandth, so the normalization function is set to normalize in the range [−0.001, 0.001]. According to the above requirements, the function is transformed as follows:
Figure 7a shows that the larger c is, the greater the correction of the Manning coefficient and the faster the optimal value is found. When the correction is near the optimal value, swing oscillation may be caused by an excessive c. Similarly, Figure 7b shows that the larger a is, the narrower the fine-tuning area. That is, the adaptive correction system is fine-tuned when the time error is small, and if the system is hard to fine-tune, a corrected swing oscillation appears. Therefore, parameter c can control the upper limit of the correction amount at one time, and parameter a can control the width of the fine-tuning area. Adjusting the parameters a or c, the purpose is to get a reasonable Manning’s correction value. If one wants to speed up the correction, one can increase c to enlarge the amount of one correction, and if one wants to widen the fine-tuning area, one can decrease a. Algorithm 1 shows the pseudocode for the adjustment logic.
| Algorithm 1: for adjustment of each gauge. |
 |
2.3. Model Running Conditions
2.3.1. Boundary Conditions
The boundary conditions are divided into two types: open boundary and closed boundary. The open boundary allows inflows and outflows, while a closed boundary forbids inflows and outflows. In this paper, closed boundary conditions are used, and there is no in-flow during the simulation except for the water in the reservoir.
2.3.2. Stable Conditions
The stable condition aims to guarantee the conservation laws that assumes the total masses of water remain conservative in the computing process. It states that during a time step, all water cuboid particles should not travel out of the boundary of its template of size ; otherwise, the total masses of water will be lost. Given the maximum velocities and , the CFL condition for this model places an upper bound on the time step, which is as follows [4]:
2.4. Experimental Design
2.4.1. Control Point Selection
First, the centerline of the stream was built based on the topographical data of the Malpasset Dam; second, the midpoints among gauges along the centerline were used as the control points. As shown in Figure 8, C6, C7…, C14 are the selected control points.
2.4.2. Parameter Settings
In the model validation, the difference in the range of Manning coefficients between land covers was not considered, thus avoiding the irrelevant factors of the model study. The Manning coefficients of all control points were restricted to a generic range [0.01, 0.1]; that is, the minimum value of the Manning coefficient in the adaptive correction, , was set to 0.01, and the maximum value, , was set to 0.1. According to the simulation data of the physical model, the parameters and the time matrix of the fluid reaching gauges 6, 7…, 14 were set as follows:
3. Results and Discussion
3.1. Verification of the Logic and Stability of Adaptive Correction
To verify the logic and stability of adaptive correction, it is necessary to set the relaxation coefficient c and parameter a as invariants and the initial matrix of the Manning coefficient as variable, so as to judge the logic and stability of the model’s correction for different initial values of the Manning coefficient. Here, the relaxation factor c was set to 2, and the parameter a was set to 0.2 in the normalization function. To research the effect of the correction logic, logic-A and logic-B were verified separately. To verify that the Manning coefficient correction is convergent in various situations (correction from the three initial states of smaller, larger, and intermediate values), three initial values of the Manning coefficients were designed using the two logics. Three initial Manning coefficient matrices corresponding to control points C6, C7…, C14 were set as follows:
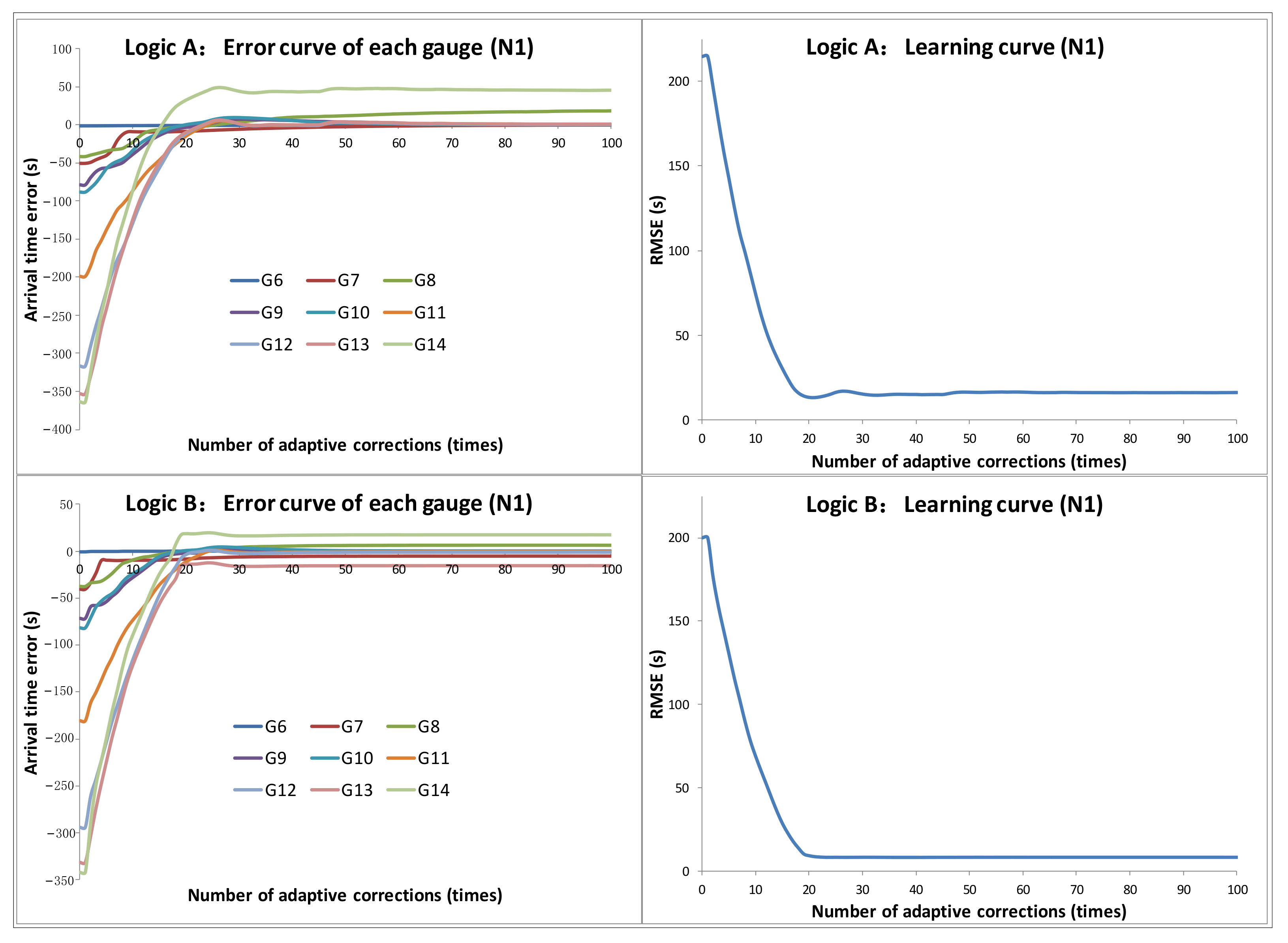
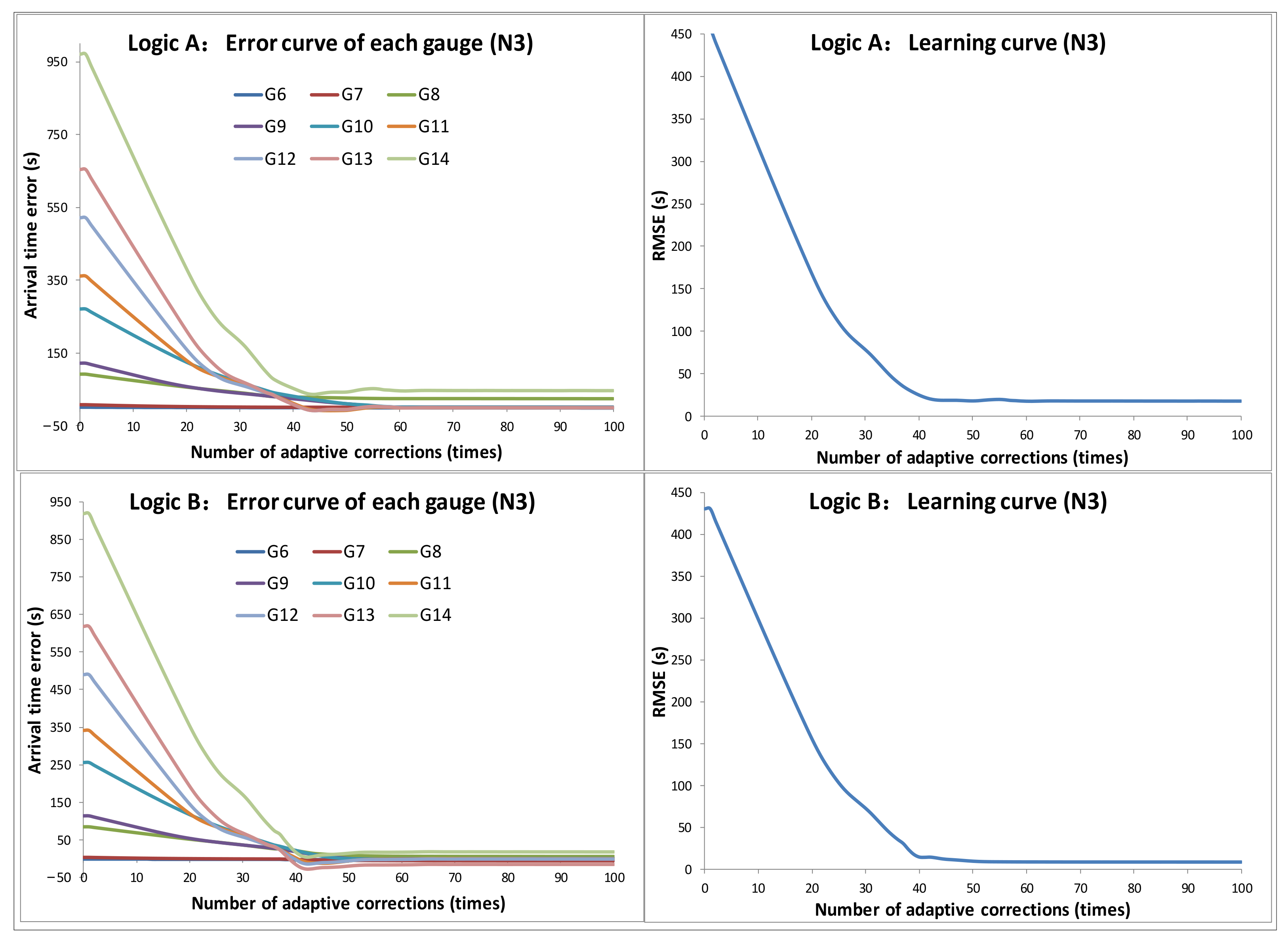
Figure 9, Figure 10 and Figure 11 show the error change and learning curve for each gauge using logic-A and logic-B. Figure 9 uses matrix to perform adaptive correction and convergence. Due to the small initial Manning coefficient and therefore the small friction, the arrival time of each gauge is advanced in the early simulation phase. As a result, the errors start to converge from negative to optimal values. Since the adjustment of the Manning coefficient did not reach the boundary of the correction range [0.01, 0.1] before approximately six iterations were performed on each control point, logic-B was not involved in the iteration, so the process of convergence is consistent with a stable state. After approximately six iterations, the range boundary of the correction appears at C14 (the Manning coefficient was adjusted to 0.01, the lowest value), so the effect of logic-B on the G13 change curve can be observed in the figure. Because logic-B is adjusted from the overall perspective and logic-A is more about local optimization, a bipolar behavior could be found in the three diagrams for the change curve of logic-A: the errors of some gauges are close to zero, while others have major errors. For logic-B, the error distribution is more uniform at each gauge. From the learning curve, the RMSE of logic-B is smaller than that of logic-A. Figure 11 uses matrix for adaptive correction and convergence; therefore, contrary to Figure 9, the error converges from a major positive value to the optimal state. The intervention of logic-B occurs approximately 37 times. The final steady state is consistent with Figure 9.
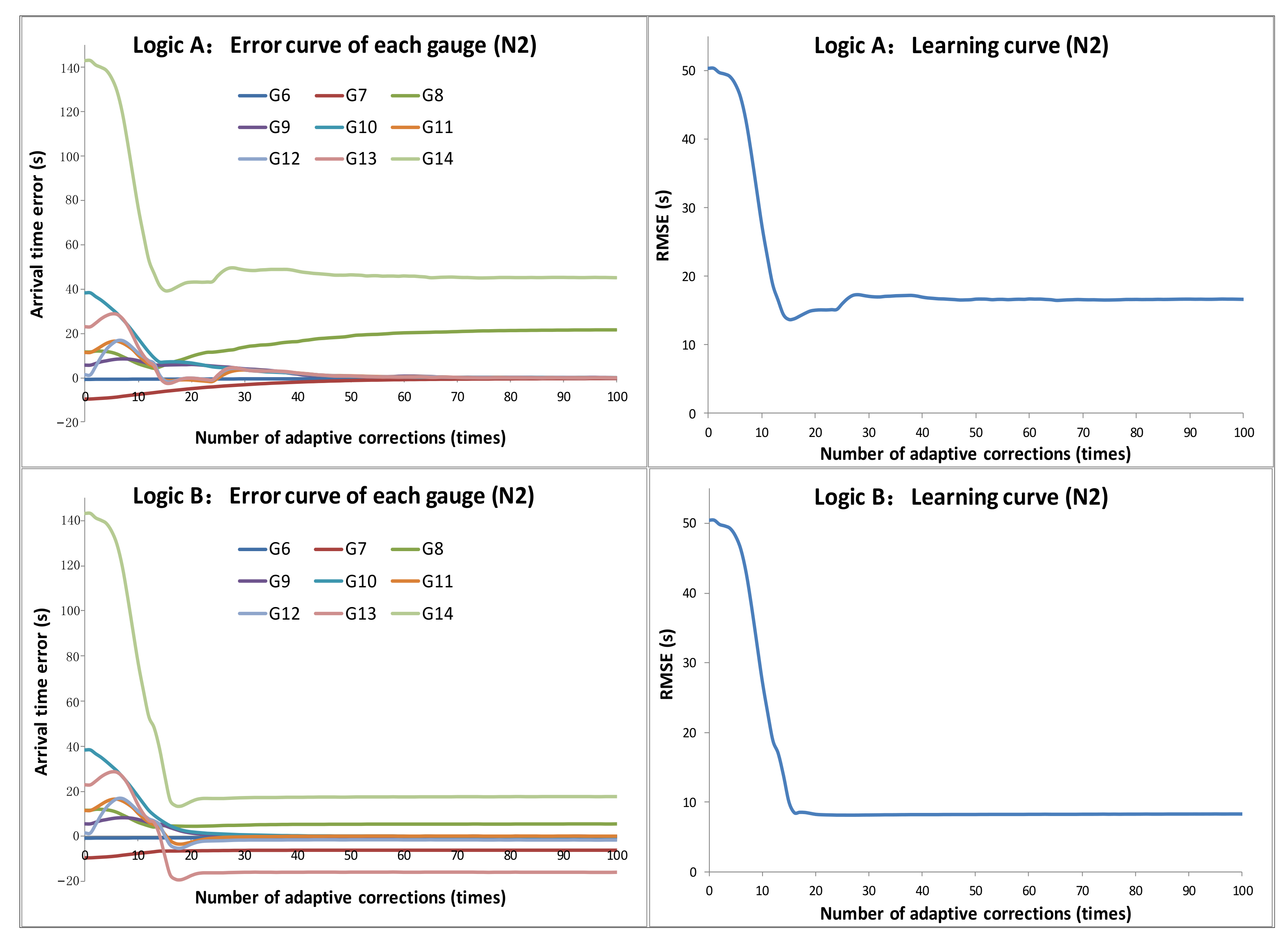
Figure 10 uses matrix for adaptive correction convergence. Without the spatialized design, a constant Manning coefficient of 0.033 is a good value for simulation. Therefore, when using the spatialized design, unlike and , the system is adaptively corrected from the same state as the constant Manning coefficient of 0.033; some of the Manning coefficients at the control points will be increased while others will be decreased, and some error variation curves will appear at the inflection points at the beginning. This is caused by the coupling of the adaptive correction process on each control point. This kind of coupling is difficult to avoid and more prominent in the unstable state in the early stage of adaptive correction. As the adaptive correction process finally stabilizes, this phenomenon disappears.
Through these six sets of experiments, it is concluded that the adaptive correction from three directions is stable and consistent, indicating the rationality of the adaptive correction logic design (that is, the optimal state is unique). After comparing two kinds of logic, logic-A can obtain a state with local optimization accuracy (that is, the errors of some gauges are stabilized at the minimum value, while the RMSE is not stabilized at the minimum value), while logic-B can obtain a state with global optimization accuracy (that is, the RMSE is stabilized at the minimum value). Thus, appropriate logic can be selected for adaptive correction according to different practical needs.
3.2. Verification of the Convergence of Adaptive Correction
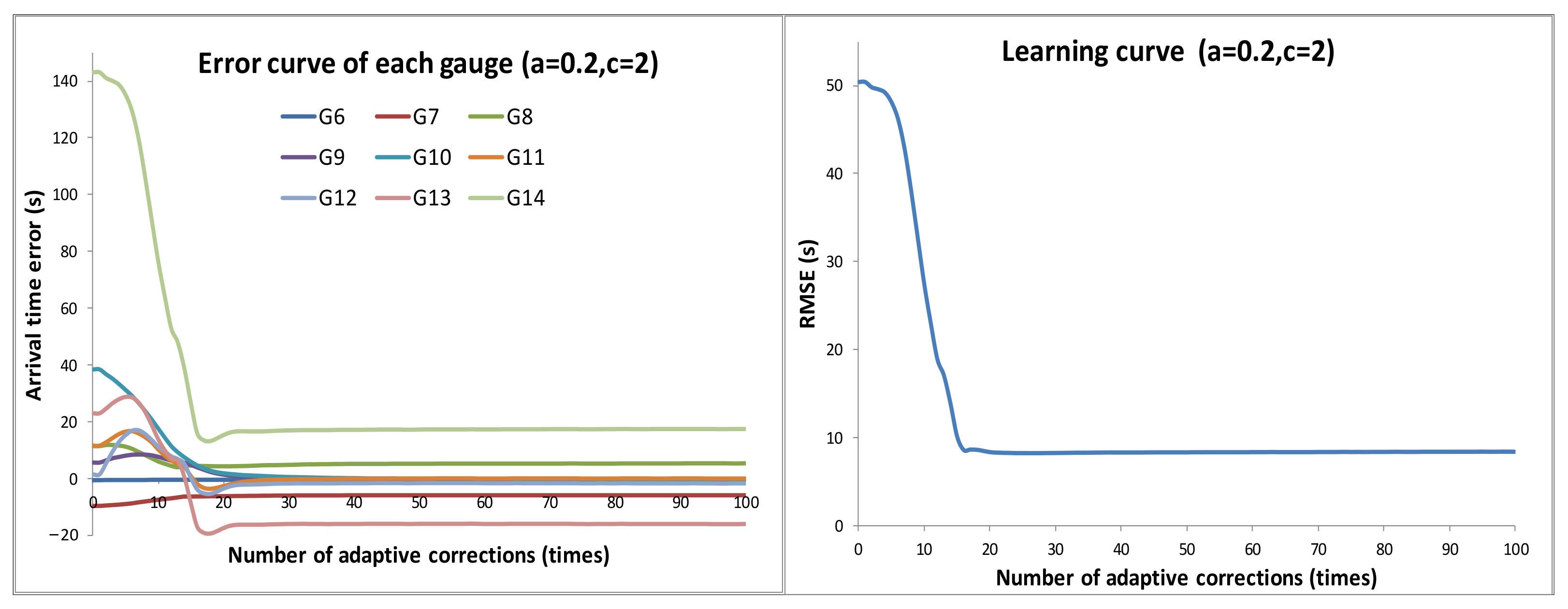
As mentioned in the above section, the relaxation factor c and parameter a in the normalization function affect the convergence of the adaptive correction system. This section analyzes the influence of two parameters on convergence. The following experiments were performed with and logic-B as initialization conditions.
- To analyze the effect of relaxation factor c, and , 3, and 4 were set for three sets of data for the experiments.
- To analyze the effect of parameter a, and , 0.35, and 0.5 were set for three sets of data for the experiments.
With different parameter settings, the experimental results are shown as follows (Figure 12, Figure 13 and Figure 14):
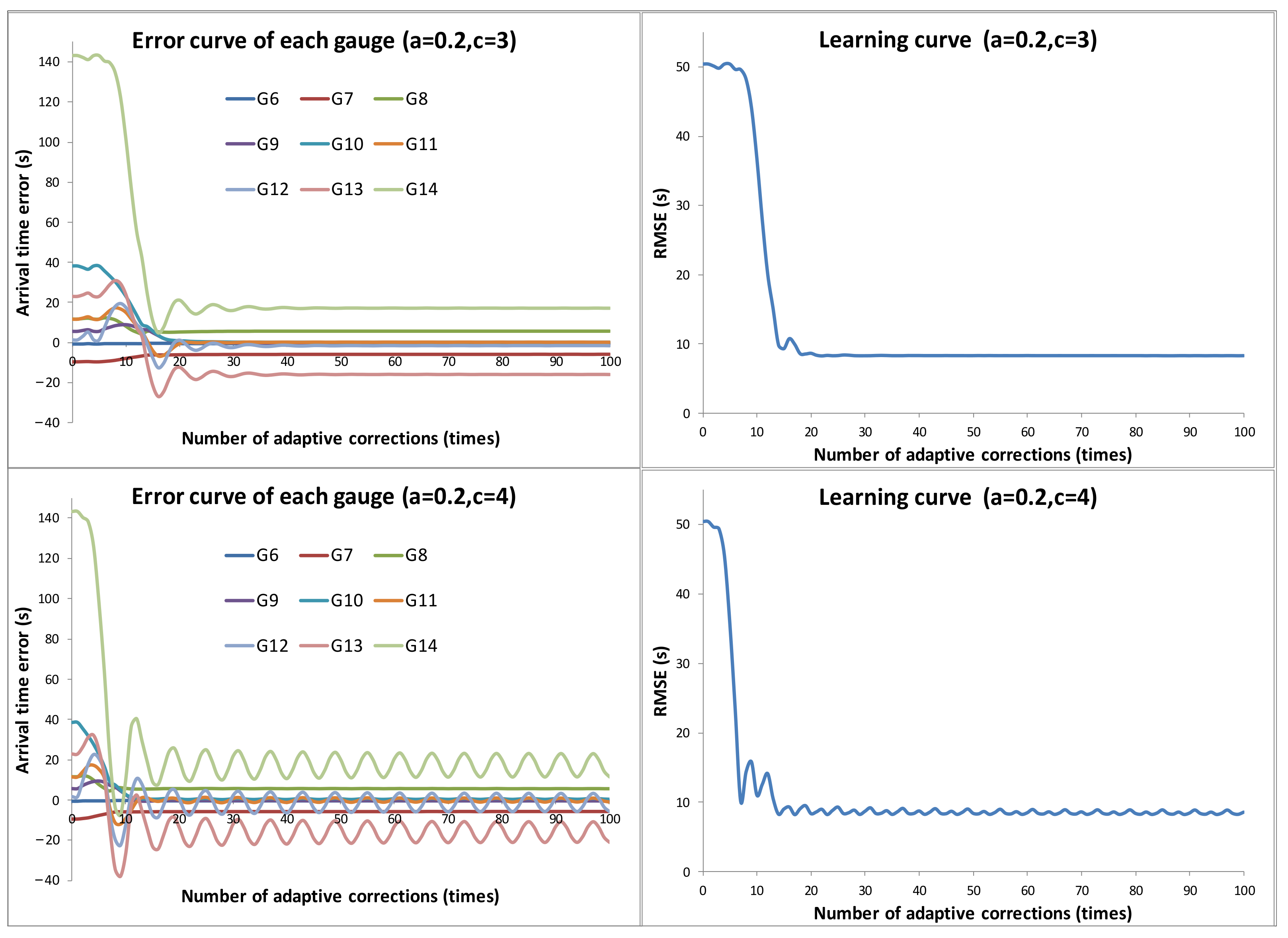
According to Figure 12 and Figure 13, when the relaxation factor c changes from 2 to 4, according to Equation (11), the adaptive correction becomes larger, which leads to a larger correction of water arrival time , forming a cycle that produces the error curve and the learning curve. These curves begin to fluctuate considerably, and the larger the relaxation factor, the larger the fluctuation. The essence of this is that when the self-adaptive correction value of the Manning coefficient increases with a large step, each iteration has difficulty entering the fine-tuning area, which results in the correction process swinging back and forth in the rough-tuning area to form the oscillation. When , the fluctuations are increasingly obvious from G11 to G14. This is due to the coupling caused by the flow from upstream to downstream. Although decoupling is designed for correction logic, for such time-series events, the correction coupling at each control point can only be minimized, and not eliminated. When the relaxation factor makes the correction process unstable, this weak coupling property appears. In addition, according to the learning curve, when c is 2, 3, and 4, the speed at which the curve drops to the lowest point is approximately 16 times, 12 times, and 8 times, respectively. In summary, the relaxation factor affects the speed of adaptive correction convergence. If it is too high, fluctuations occur. Therefore, it is critical to set an appropriate relaxation factor.
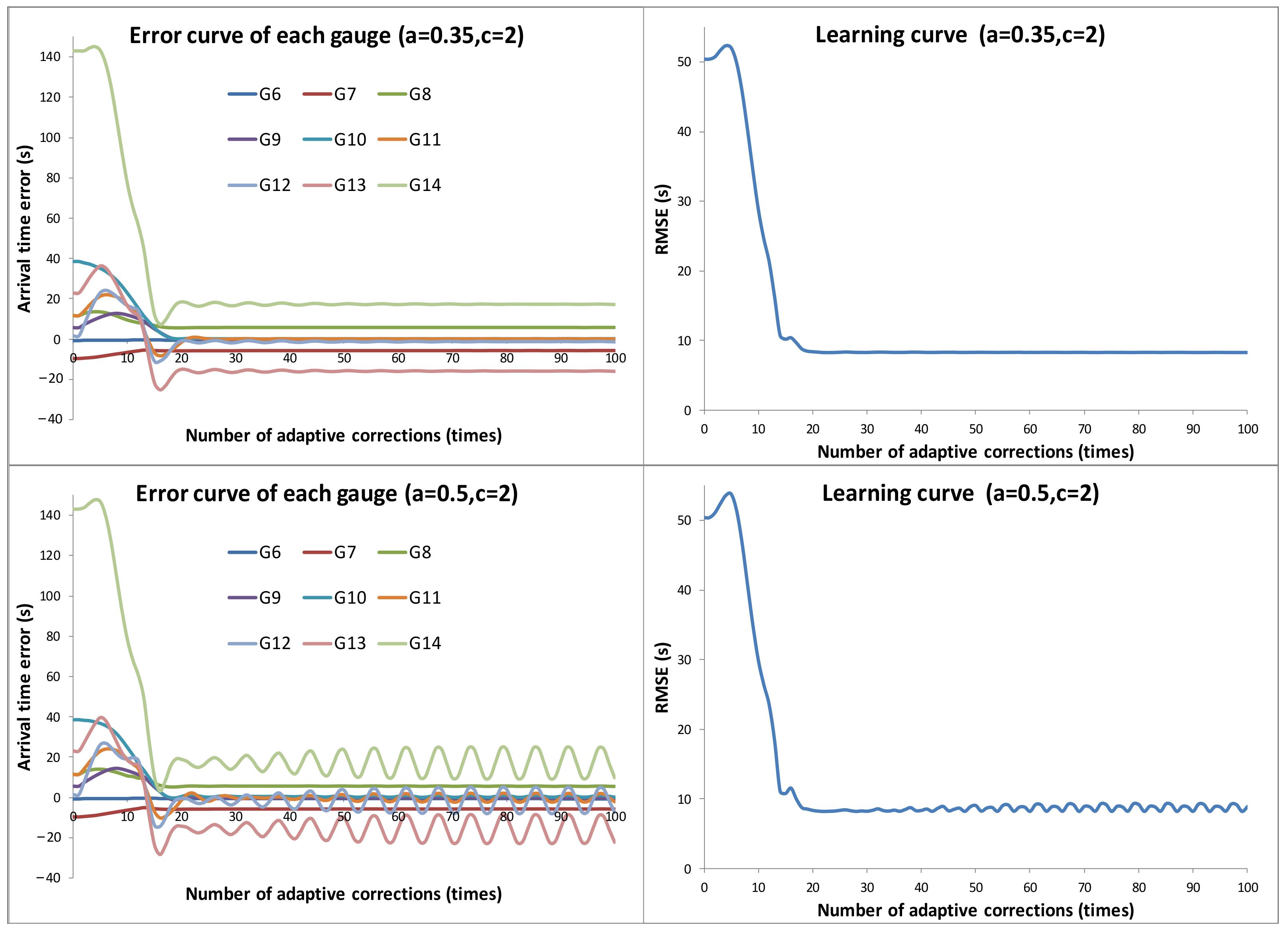
According to Figure 12 and Figure 14, when , a changing from 0.2 to 0.5 also generates fluctuations in the error change curve and learning curve, and these fluctuations become increasingly larger. Parameter a in the normalization function mainly controls the fine-tuning area in the adaptive adjustment. When a is increased, the fine-tuning area becomes narrower, which turns the fine-tuning area into the rough-tuning area, resulting in over-adjustment and fluctuation. Similar to the relaxation factor, parameter a also expresses the weak coupling relationship of each time error.
In summary, although the correction logic guarantees the stability of the correction, it cannot guarantee the progressivity of the correction. To obtain good progressivity, a suitable relaxation factor c and parameter a must be found in the normalization function. In the actual simulation process, the convergence speed can be adjusted by the relaxation factor c, and the width of the fine-tuning area can be adjusted by parameter a. This eventually results in a high adaptive correction speed and meets the convergence requirements of the correction process.
3.3. Evaluation of the Accuracy of Adaptive Correction
There are many methods for model accuracy evaluation, including absolute error (AE), relative error (RE), mean squared error (MSE), mean relative error (MRE), etc. [40]. In this paper, we mainly use RE and MRE for simulation accuracy evaluation, and the calculation formula is as follows:
where is the simulation result, is the actual value, and m is the number of measurements.
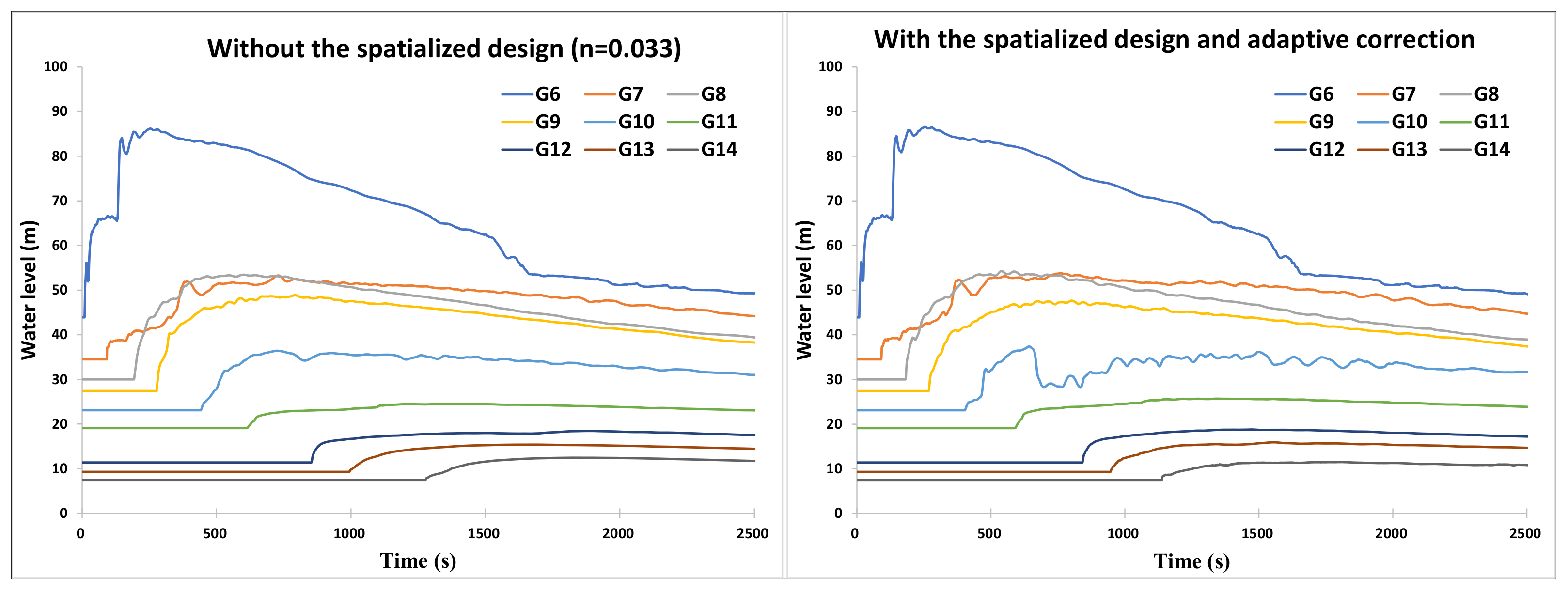
Figure 15 shows the water level curves for each gauge during the different simulation experiments. When the water arrives at each gauge, the water level remains at the river bottom elevation, so the curve appears to rise when the water arrives at each gauge. With the dam breaching process, the water level shows a trend of sudden rise first and then a gentle fall. From the figure, we can obtain the water arrival time and maximum water level of each gauge during the simulation.
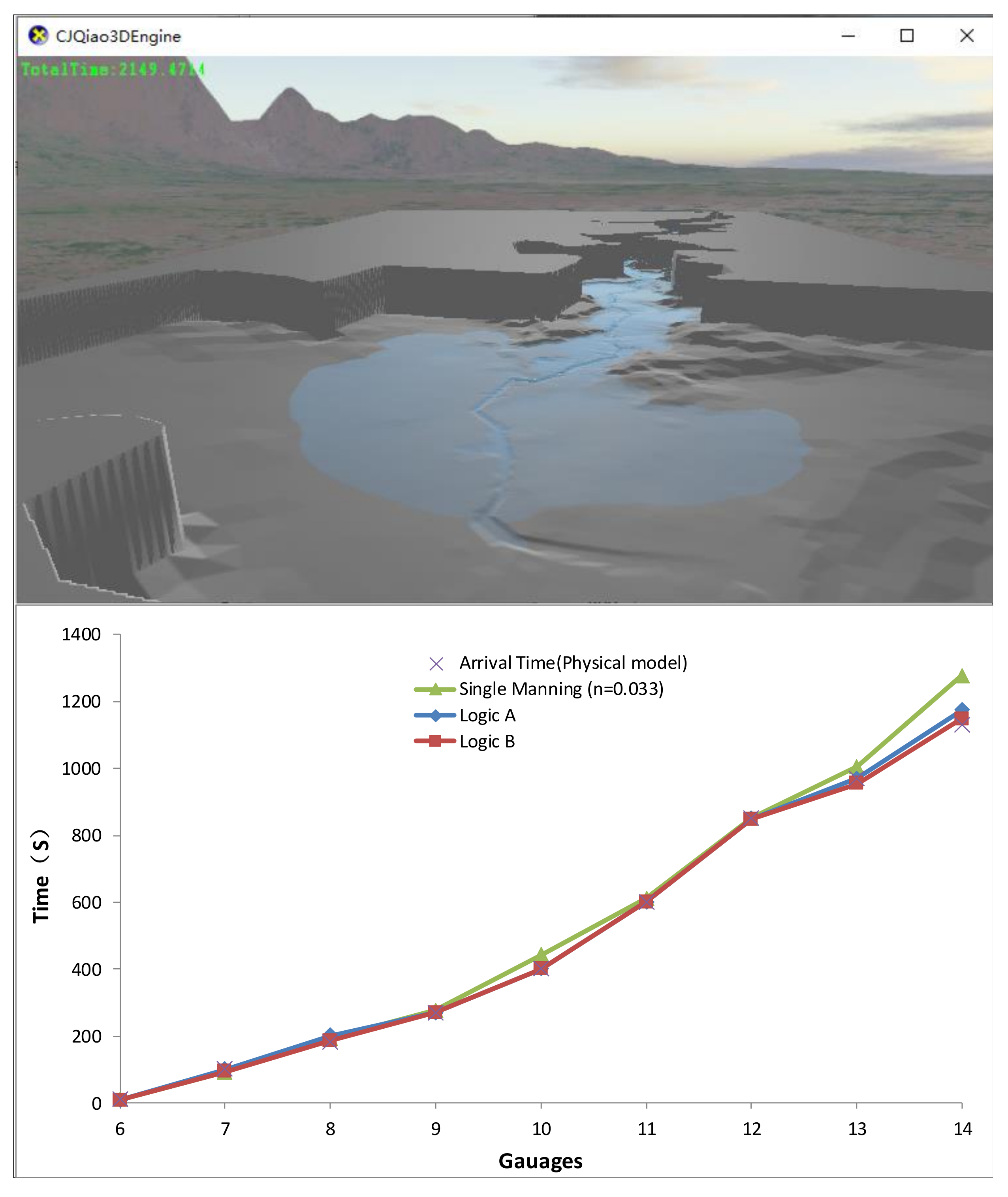
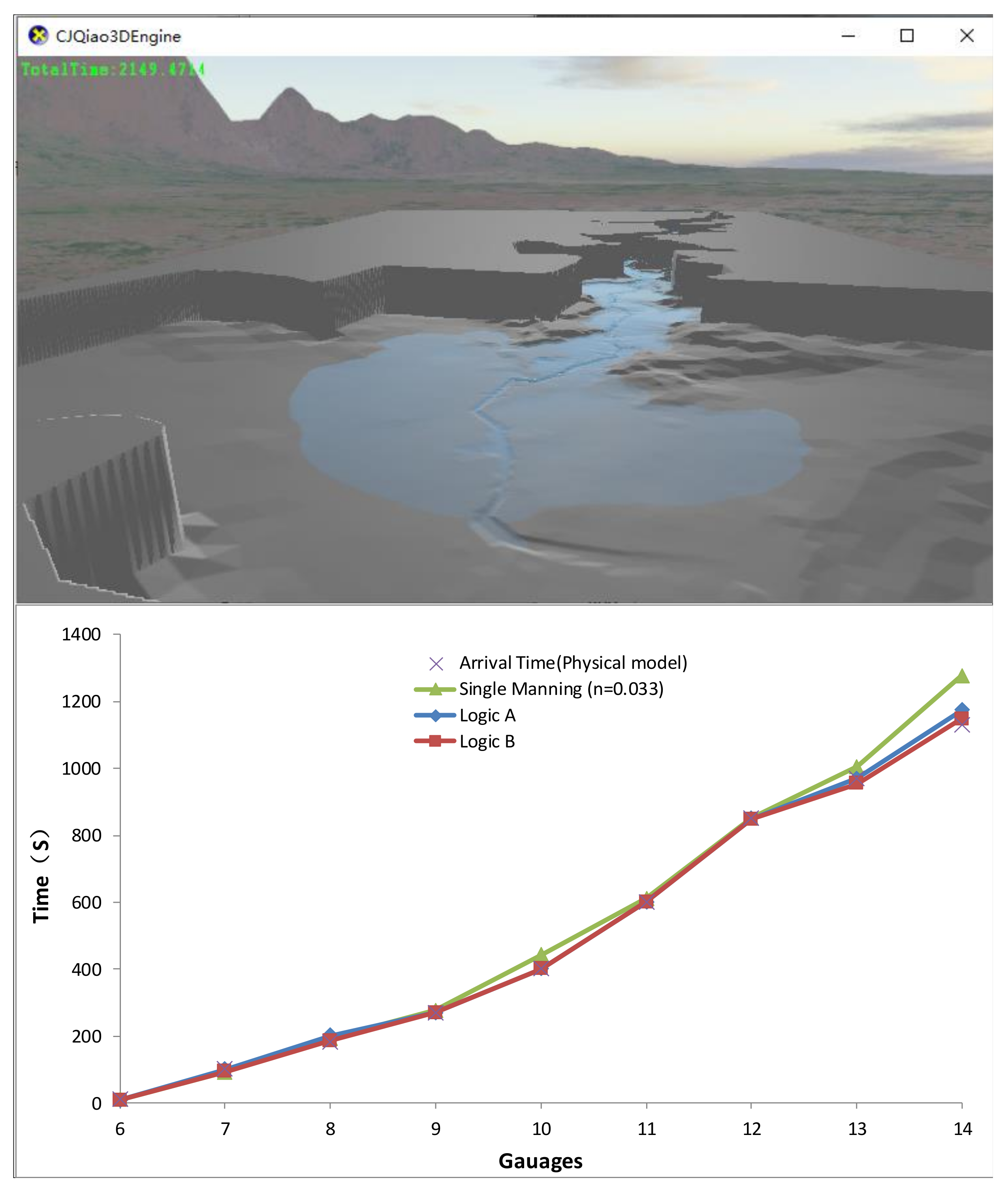
Table 2 shows the comparison of the maximum water level and the arrival time in the simulated model with the field-observed data in the physical model and results in the Telemac-2D model at the location of 9 gauges. For each gauge, the maximum water levels and arrival time of the flows in the physical model and the maximum water levels in the Telemac-2D simulation can be obtained from Hervouet’s thesis [31]. By comparing the average relative error, both the spatialized and non-spatialized models have similar simulation accuracy with the Telemac-2D simulation in terms of the maximum water level at each gauge. Comparing the relative errors, it can be seen that the spatialized design model has reduced the relative errors in the arrival time at each gauge compared to the non-spatialized design model. Additionally, the relative error in the water level does not change much for both. Figure 16 shows a comparison chart between before and after adaptive correction. As seen from the figure, with the adaptive correction of the Manning coefficients, the simulation results are more in line with the real situation.
4. Conclusions
The parameter spatialization and adaptive correction model are proven to be correct and effective through experimental analysis and verification. It can help reduce the artificial calibration and improve simulation accuracy. The comparison of logic-A and logic-B shows that logic-A only considers the error correction of a single control point; thus, the correction result may have unevenness in its accuracy distribution, and some errors are larger while others are small. Logic-B considers the coupling of upstream and downstream in the adaptive correction process of the Manning coefficient, so the correction result is globally optimal. By comparing and analyzing the relaxation factors and parameters in the normalization function, we can obtain the influence on the stability and convergence of the adaptive modification process. When both relaxation factors and parameters are too large, correction oscillation occurs. In short, the correction logic controls the stability of the correction, and the relaxation factor and the parameter in the normalization function control the retractability of the adaptive correction. In practical applications, through adaptive correction of the Manning coefficient, the system can adaptively fit the hydrodynamics model to the real data to improve simulation accuracy. In addition, the parameter spatialization and adaptive correction model can be regarded as an inversion system for the spatial distribution of the coefficient. It can be used to infer the spatial distribution of the Manning coefficient from simulation results.
Funding
This study was supported by the Key Laboratory of National Geographic Census and Monitoring, Ministry of Natural Resources under Grant No. 2020NGCM04, Natural Science Foundation of Henan Province under Grant No. 202300410030, Key scientific and technological project of Henan Province under Grant No. 202102310526, and Key Scientific Research Projects of Henan Colleges and Universities under Grant No. 19A420001.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Acknowledgments
The authors would like to thank Stephen Thompson for technical guidance, Andre Rigland Brodtkorb for the Malpasset Dam data, and Weijuan Ji for the great help in the linguistics.
Conflicts of Interest
The authors declared no conflict of interest.
References
- Echeverribar, I.; Morales-Hernández, M.; Brufau, P.; García-Navarro, P. 2D numerical simulation of unsteady flows for large scale floods prediction in real time. Adv. Water Resour. 2019, 134, 103444. [Google Scholar] [CrossRef]
- Shi, H.B.; Si, P.F.; Dong, P.; Yu, X.P. A two-phase SPH model for massive sediment motion in free surface flows. Adv. Water Resour. 2019, 129, 80–98. [Google Scholar] [CrossRef]
- Haridas, A.; Vadlamani, N.R.; Minamoto, Y. Deep Neural Networks to Correct Sub-Precision Errors in CFD. arXiv 2022, arXiv:2202.04233. [Google Scholar]
- Qiao, C.; Li, J.; Tian, Z. A new approach for fluid dynamics simulation: The Short-lived Water Cuboid Particle model. J. Hydrol. 2016, 540, 437–456. [Google Scholar] [CrossRef]
- Kurganov, A.; Petrova, G. A second-order well-balanced positivity preserving central-upwind scheme for the Saint-Venant system. Commun. Math. Sci. 2007, 5, 133–160. [Google Scholar] [CrossRef]
- Chertock, A.; Cui, S.; Kurganov, A.; Wu, T. Well-balanced positivity preserving central-upwind scheme for the shallow water system with friction terms. Int. J. Numer. Methods Fluids 2015, 78, 355–383. [Google Scholar] [CrossRef]
- Garg, N.K.; Gowda, G. Godunov-type schemes for the pressureless gas dynamics and related models. Appl. Math. Comput. 2022, 418, 126790. [Google Scholar] [CrossRef]
- Maia, A.; Cavalca, D.F.; Tomita, J.T.; Costa, F.P.; Bringhenti, C. Evaluation of an effective and robust implicit time-integration numerical scheme for Navier-Stokes equations in a CFD solver for compressible flows. Appl. Math. Comput. 2022, 413, 126612. [Google Scholar] [CrossRef]
- Chiapolino, A.; Saurel, R. Models and methods for two-layer shallow water flows. J. Comput. Phys. 2018, 371, 1043–1066. [Google Scholar] [CrossRef]
- Roe, P.L. Approximate Riemann solvers, parameter vectors, and difference schemes. J. Comput. Phys. 1981, 43, 357–372. [Google Scholar] [CrossRef]
- Glaister, P. Approximate Riemann solutions of the shallow water equations. J. Hydraul. Res. 1988, 26, 293–306. [Google Scholar] [CrossRef]
- Zhao, D.; Shen, H.; Lai, J.; Tabios, G.Q., III. Approximate Riemann Solvers in FVM for 2D Hydraulic Shock Wave Modeling. J. Hydraul. Eng. 1996, 122, 692–702. [Google Scholar] [CrossRef]
- Aizinger, V.; Dawson, C. A discontinuous Galerkin method for two-dimensional flow and transport in shallow water. Adv. Water Resour. 2002, 25, 67–84. [Google Scholar] [CrossRef]
- Lai, W.; Khan, A.A. A discontinuous Galerkin method for two-dimensional shock wave modeling. Model. Simul. Eng. 2011, 2011, 782832. [Google Scholar] [CrossRef]
- Lai, W.; Khan, A.A. Modeling dam-break flood over natural rivers using Discontinuous Galerkin method. J. Hydrodyn. 2012, 24, 467–478. [Google Scholar] [CrossRef]
- Hu, R.; Fang, F.; Salinas, P.; Pain, C.C.; Domingo, N.D.S.; Mark, O. Numerical simulation of floods from multiple sources using an adaptive anisotropic unstructured mesh method. Adv. Water Resour. 2019, 123, 173–188. [Google Scholar] [CrossRef]
- Ziliani, M.G.; Ghostine, R.; Ait-El-Fquih, B.; McCabe, M.F.; Hoteit, I. Enhanced flood forecasting through ensemble data assimilation and joint state-parameter estimation. J. Hydrol. 2019, 577, 123924. [Google Scholar] [CrossRef]
- Patankar, S.V.; Spalding, D.B. A calculation procedure for heat, mass and momentum transfer in three-dimensional parabolic flows. Int. J. Heat Mass Transf. 1972, 15, 1787–1806. [Google Scholar] [CrossRef]
- Issa, R.; Ahmadi-Befrui, B.; Beshay, K.; Gosman, A. Solution of the implicitly discretised reacting flow equations by operator-splitting. J. Comput. Phys. 1991, 93, 388–410. [Google Scholar] [CrossRef]
- Issa, R.I. Solution of the implicitly discretised fluid flow equations by operator-splitting. J. Comput. Phys. 1986, 62, 40–65. [Google Scholar] [CrossRef]
- Blocken, B.; Gualtieri, C. Ten iterative steps for model development and evaluation applied to Computational Fluid Dynamics for Environmental Fluid Mechanics. Environ. Model. Softw. 2012, 33, 1–22. [Google Scholar] [CrossRef]
- Fu, B.; Horsburgh, J.S.; Jakeman, A.J.; Gualtieri, C.; Arnold, T.; Marshall, L.; Green, T.R.; Quinn, N.W.T.; Volk, M.; Hunt, R.J.; et al. Modeling Water Quality in Watersheds: From Here to the Next Generation. Water Resour. Res. 2020, 56, e2020WR027721. [Google Scholar] [CrossRef]
- Jiang, C.; Soh, Y.C.; Li, H.; Masood, M.K.; Wei, Z.; Zhou, X.; Zhai, D. CFD results calibration from sparse sensor observations with a case study for indoor thermal map. Build. Environ. 2017, 117, 166–177. [Google Scholar] [CrossRef]
- Celik, I.B.; Ghia, U.; Roache, P.J.; Freitas, C.J.; Coleman, H.; Raad, P.E. Procedure for Estimation and Reporting of Uncertainty Due to Discretization in CFD Applications. J. Fluids Eng. 2008, 130, 078001. [Google Scholar]
- Nguyen, V.T.; Georges, D.; Besancon, G. Adjoint-method-based estimation of Manning roughness coefficient in an overland flow model. In Proceedings of the American Control Conference, Chicago, IL, USA, 1–3 July 2015; Volume 2015, pp. 1977–1982. [Google Scholar]
- Kajero, O.T.; Thorpe, R.B.; Chen, T.; Wang, B.; Yao, Y. Kriging meta-model assisted calibration of computational fluid dynamics models. AIChE J. 2016, 62, 4308–4320. [Google Scholar] [CrossRef]
- Guillas, S.; Glover, N.; Malki-Epshtein, L. Bayesian calibration of the constants of the k-ϵ turbulence model for a CFD model of street canyon flow. Comput. Methods Appl. Mech. Eng. 2014, 279, 536–553. [Google Scholar] [CrossRef]
- Azamathulla, H.M. Use of Gene-Expression Programming to Estimate Manning’s Roughness Coefficient for High Gradient Streams. Water Resour. Manag. 2013, 27, 715–729. [Google Scholar] [CrossRef]
- Becker, R.; Koppa, A.; Schulz, S.; Usman, M.; aus der Beek, T.; Schüth, C. Spatially distributed model calibration of a highly managed hydrological system using remote sensing-derived ET data. J. Hydrol. 2019, 577, 123944. [Google Scholar] [CrossRef]
- Sætra, M.L.; Brodtkorb, A.R.; Lie, K.A. Efficient GPU-Implementation of Adaptive Mesh Refinement for the Shallow-Water Equations. J. Sci. Comput. 2015, 63, 23–48. [Google Scholar] [CrossRef]
- Hervouet, J.M. A high resolution 2-D dam-break model using parallelization. Hydrol. Process. 2000, 14, 2211–2230. [Google Scholar] [CrossRef]
- Singh, J.; Altinakar, M.S.; Ding, Y. Two-dimensional numerical modeling of dam-break flows over natural terrain using a central explicit scheme. Adv. Water Resour. 2011, 34, 1366–1375. [Google Scholar] [CrossRef]
- Valiani, A.; Caleffi, V.; Zanni, A. Case Study: Malpasset Dam-Break Simulation using a Two-Dimensional Finite Volume Method. J. Hydraul. Eng. 2002, 128, 460–472. [Google Scholar] [CrossRef]
- Hervouet, J.M.; Petitjean, A. Malpasset dam-break revisited with two-dimensional computations. J. Hydraul. Res. 1999, 37, 777–788. [Google Scholar] [CrossRef]
- Savant, G.; Trahan, C.J.; Pettey, L.; Mcalpin, T.O.; Bell, G.L.; Mcknight, C.J. Urban and overland flow modeling with dynamic adaptive mesh and implicit diffusive wave equation solver. J. Hydrol. 2019, 573, 13–30. [Google Scholar] [CrossRef]
- Soares-Frazão, S.; Alcrudo, F.; Goutal, N. Dam-break Test Cases Summary. In Proceedings of the 4th CADAM Meeting, Zaragoza, Spain, 18–19 November 1999; European Commission: Bruxelles, Belgium, 1999. [Google Scholar]
- An, H.; Yu, S.; Lee, G.; Kim, Y. Analysis of an open source quadtree grid shallow water flow solver for flood simulation. Quat. Int. 2015, 384, 118–128. [Google Scholar] [CrossRef]
- Chen, T.Y.K.; Capart, H. Kinematic wave solutions for dam-break floods in non-uniform valleys. J. Hydrol. 2020, 582, 124381. [Google Scholar] [CrossRef]
- Zhang, M.; Wu, W. A two dimensional hydrodynamic and sediment transport model for dam break based on finite volume method with quadtree grid. Appl. Ocean Res. 2011, 33, 297–308. [Google Scholar] [CrossRef]
- Bennett, N.D.; Croke, B.F.; Guariso, G.; Guillaume, J.H.; Hamilton, S.H.; Jakeman, A.J.; Marsili-Libelli, S.; Newham, L.T.; Norton, J.P.; Perrin, C.; et al. Characterising Performance of Environmental Models. Environ. Model. Softw. 2013, 40, 1–20. [Google Scholar] [CrossRef]
Figure 1.
DEM and locations of the gauges.
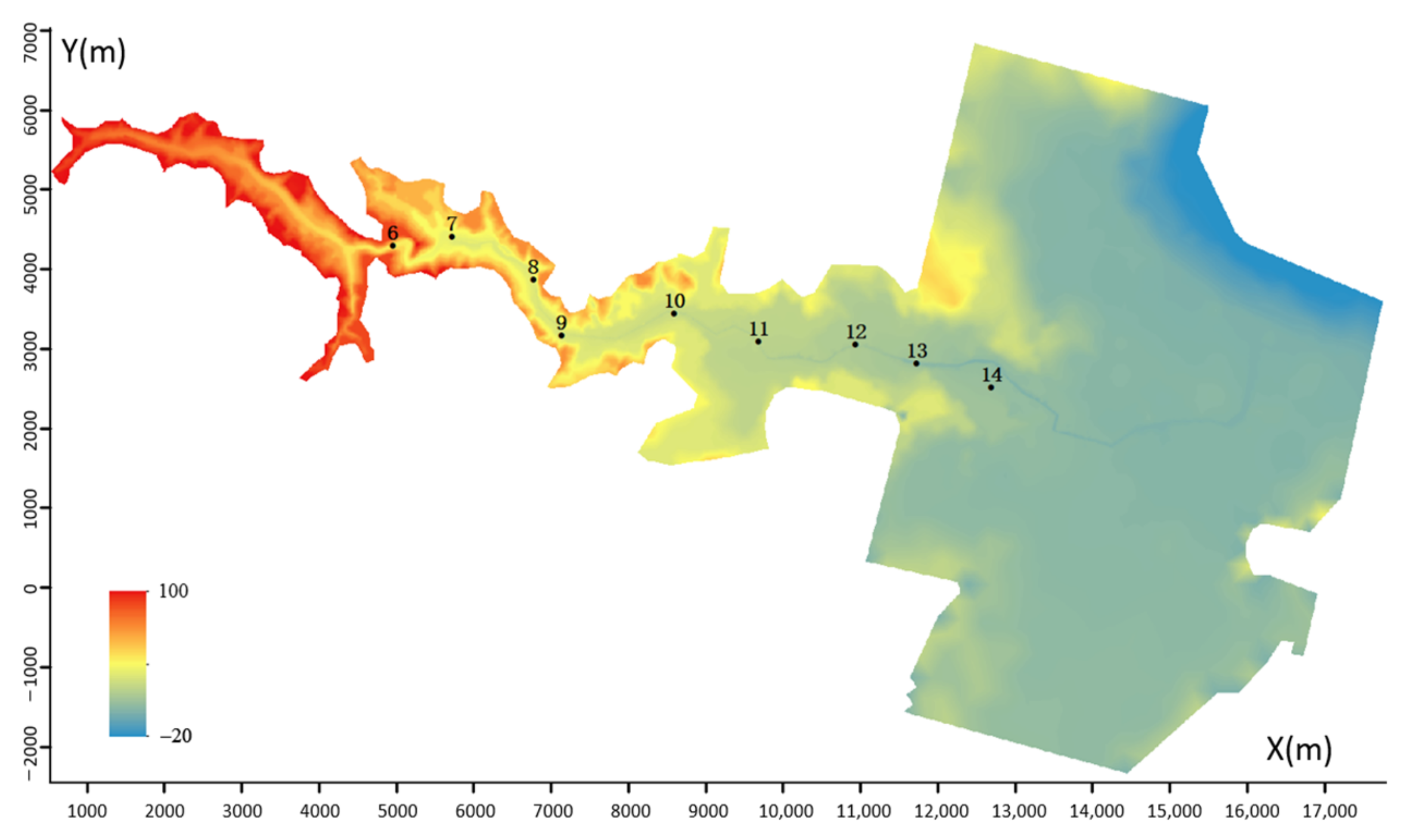
Figure 2.
Flow chart of the parameter spatialization and adaptive modification model.
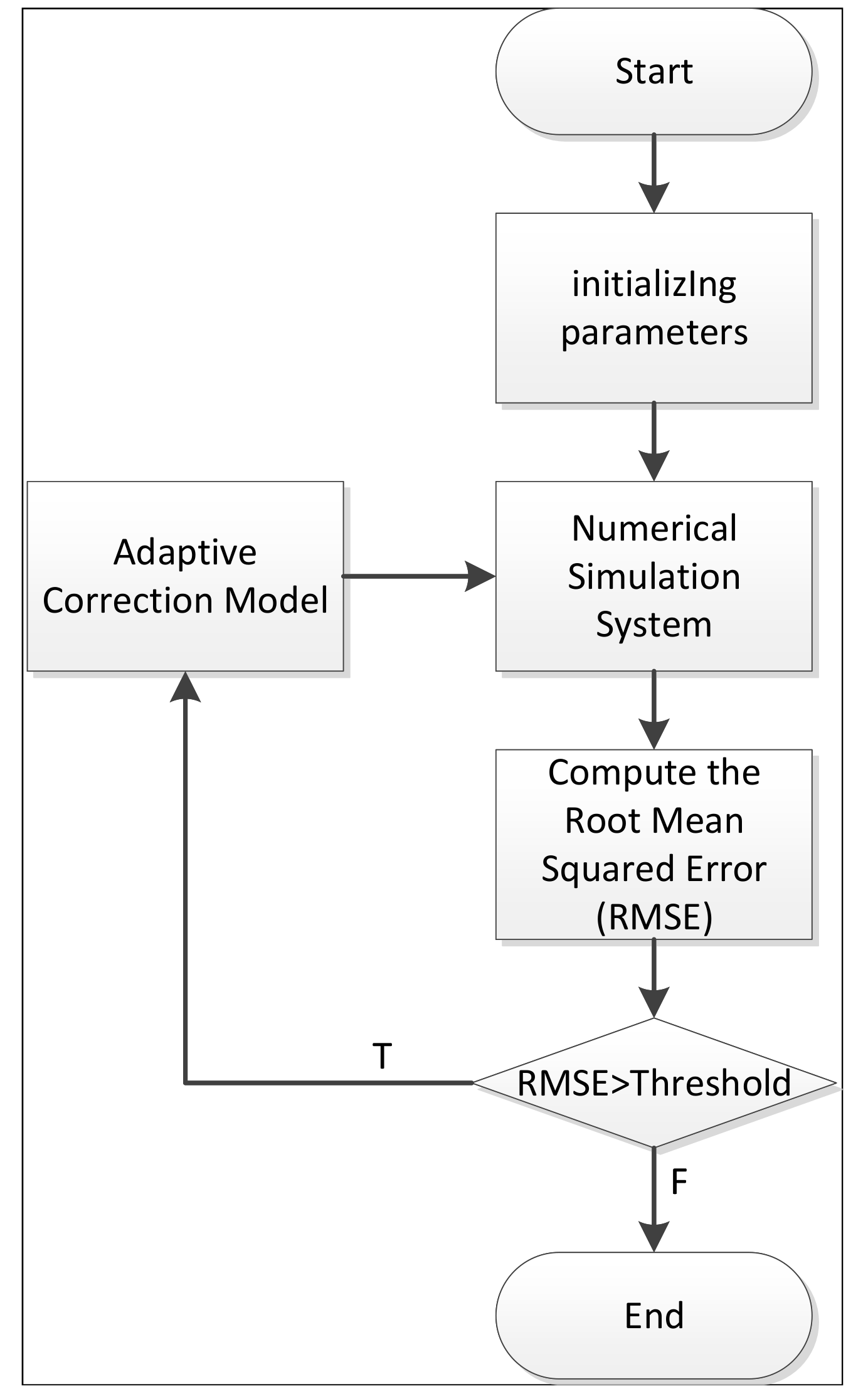
Figure 3.
The concept map of water division of the short-lived water cuboid particle model.
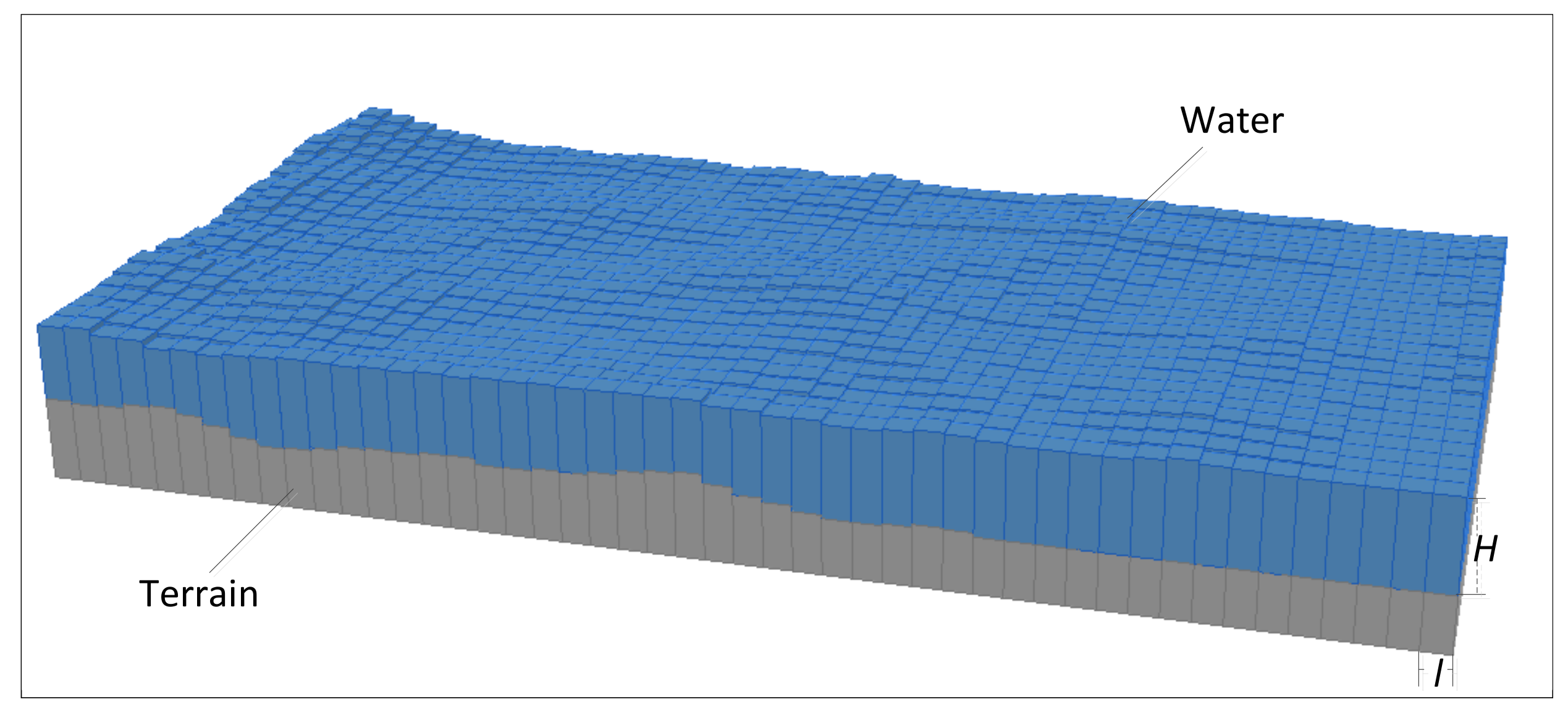
Figure 4.
Spatialized design of the Manning coefficient.

Figure 5.
Adaptive control system.
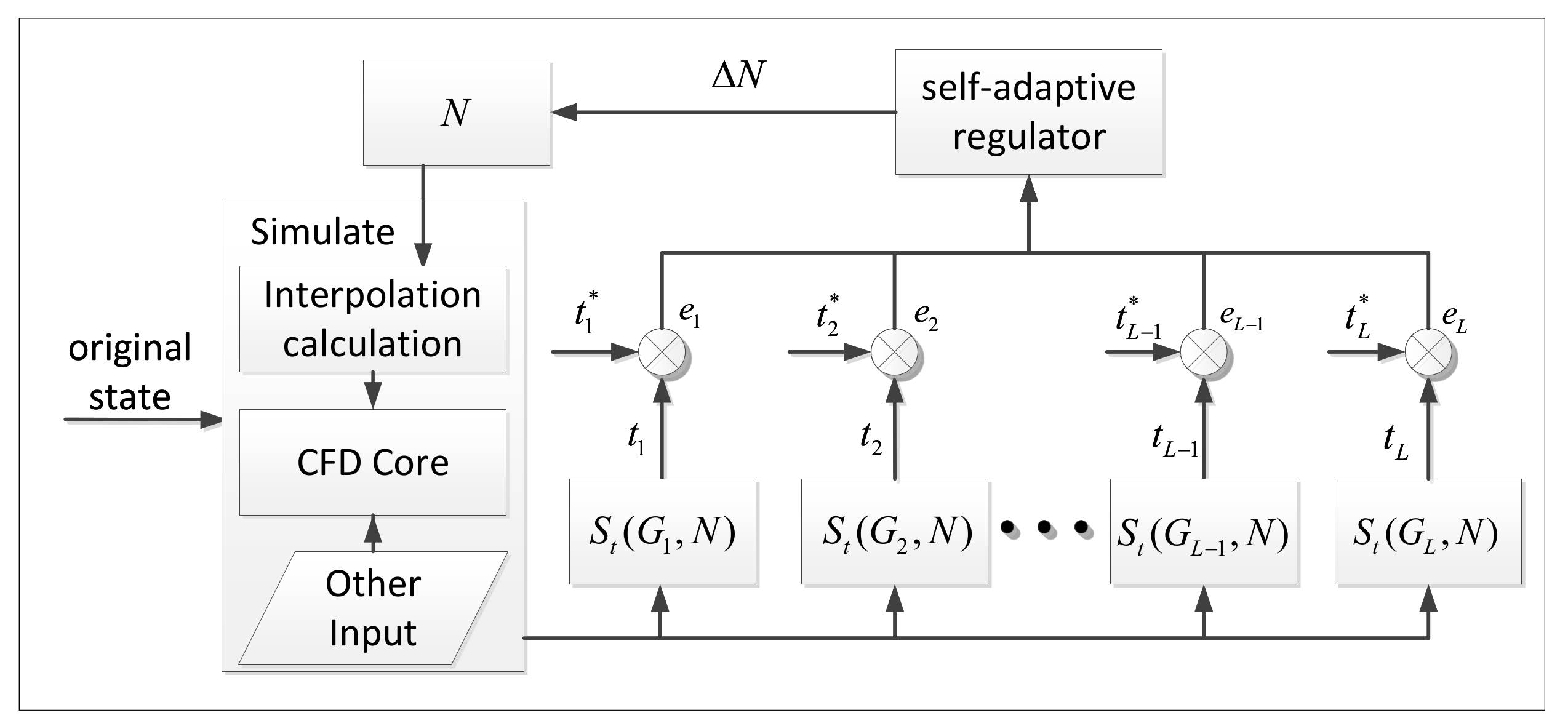
Figure 6.
Correction logic.
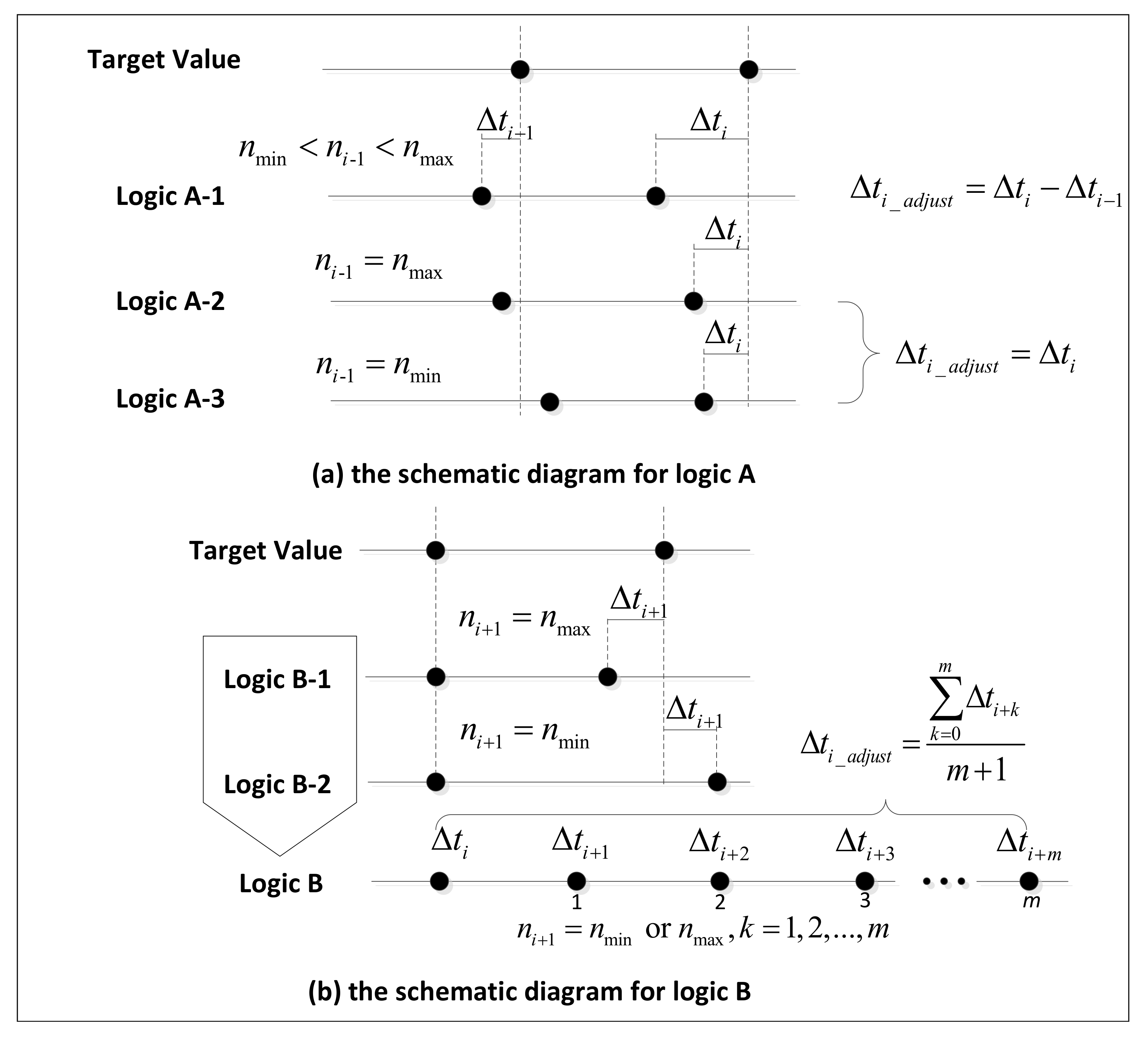
Figure 7.
Relationship between the time error and Manning coefficient correction values for different parameters.
Figure 7.
Relationship between the time error and Manning coefficient correction values for different parameters.
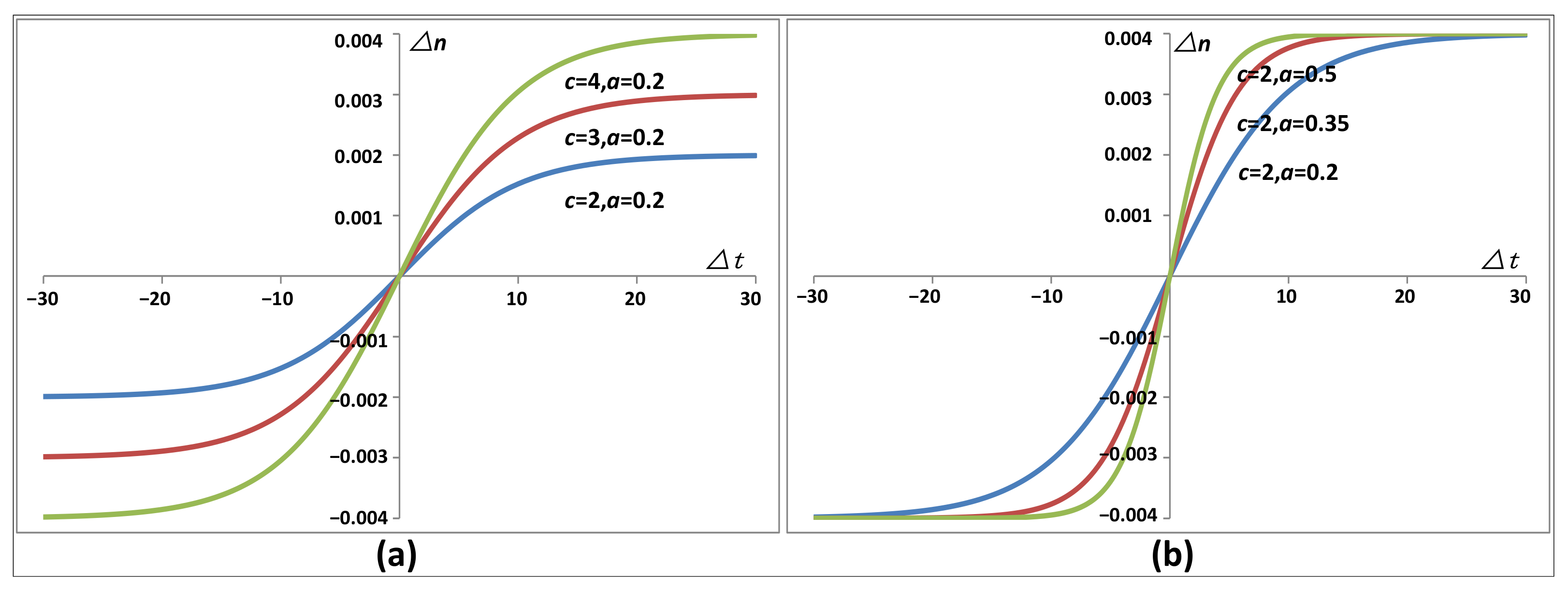
Figure 8.
Control point design.
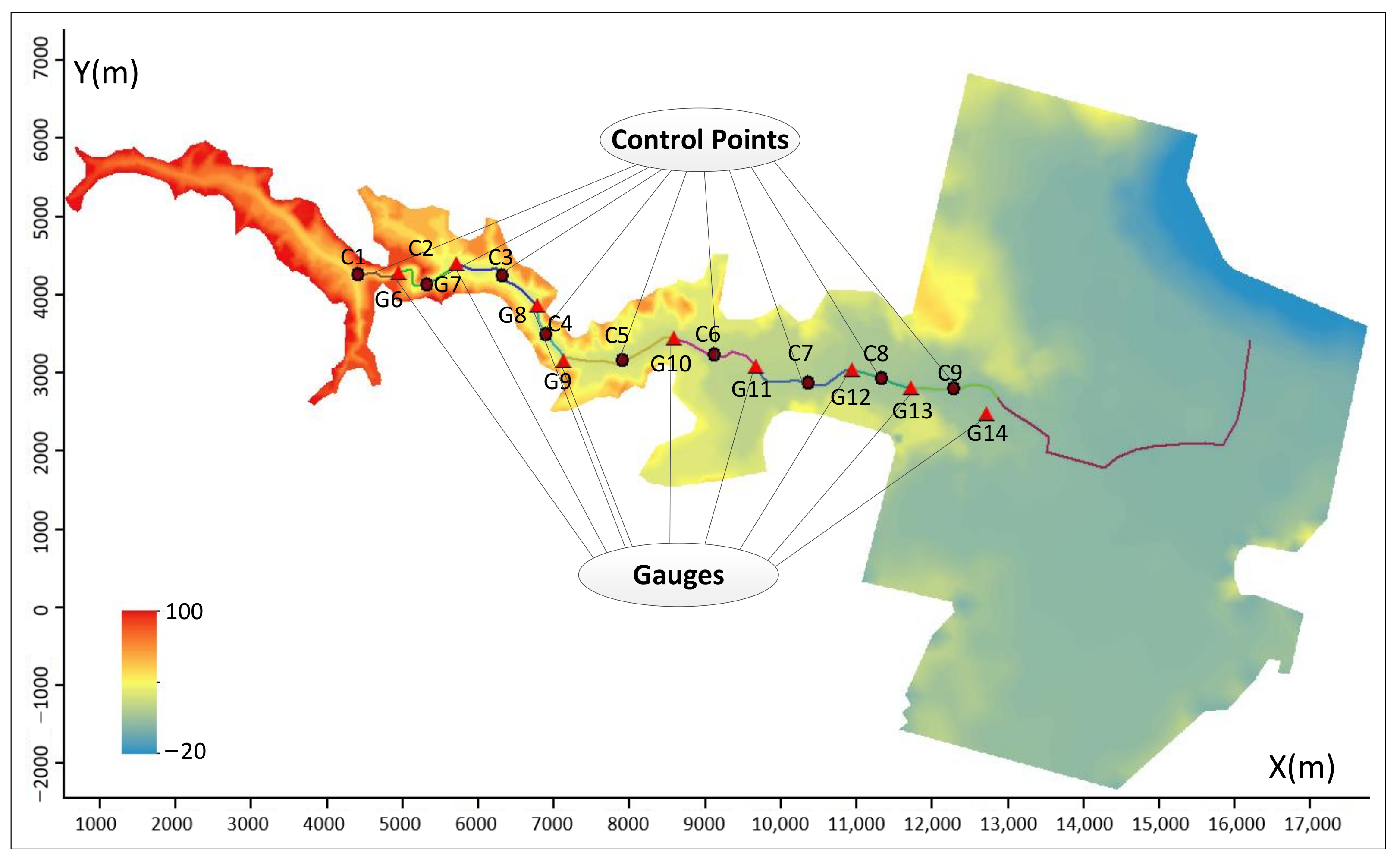
Figure 9.
Error curve and learning curve of each gauge in logic A and logic B ().
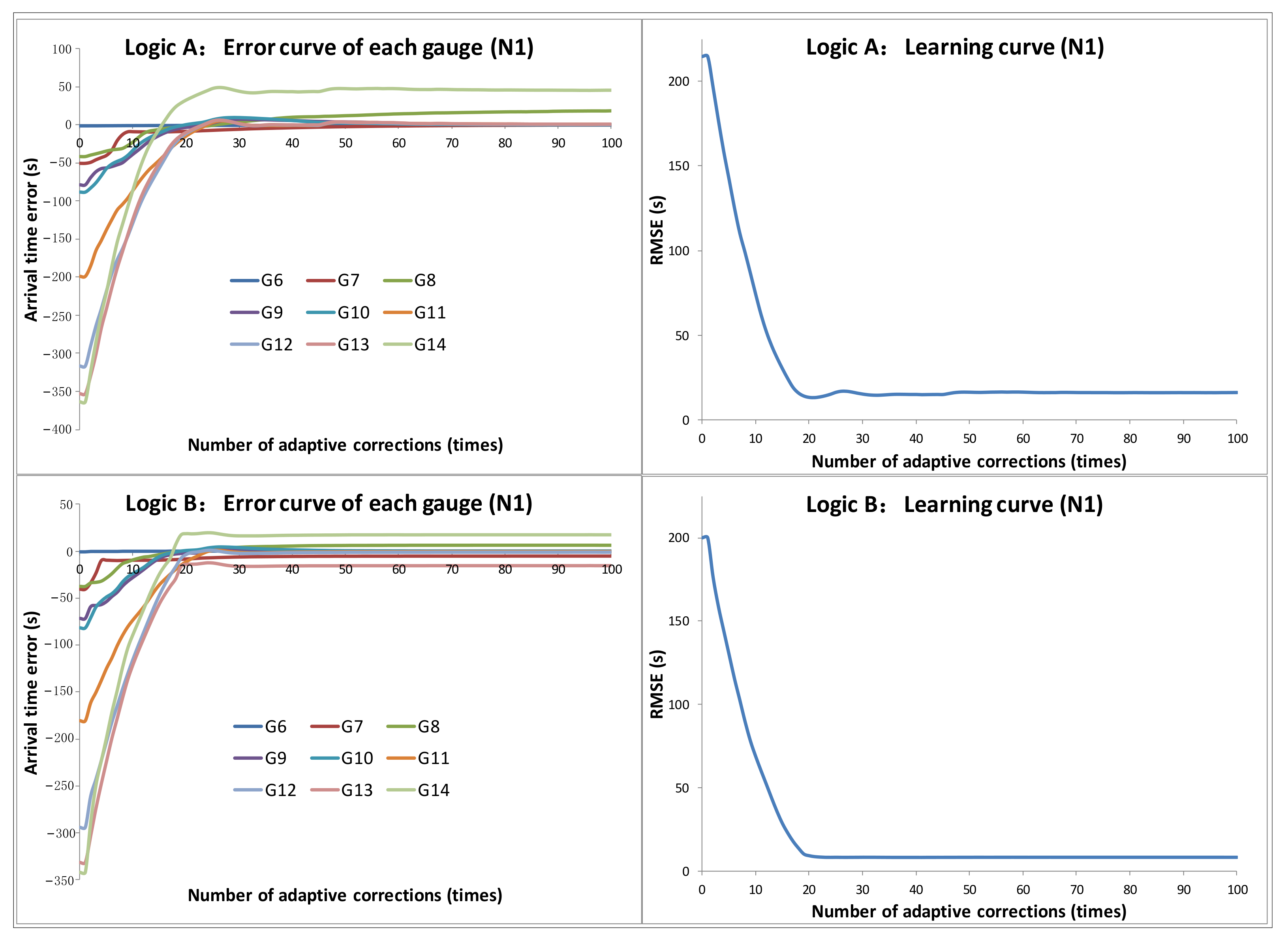
Figure 10.
Error curve and learning curve of each gauge in logic A and logic B ().
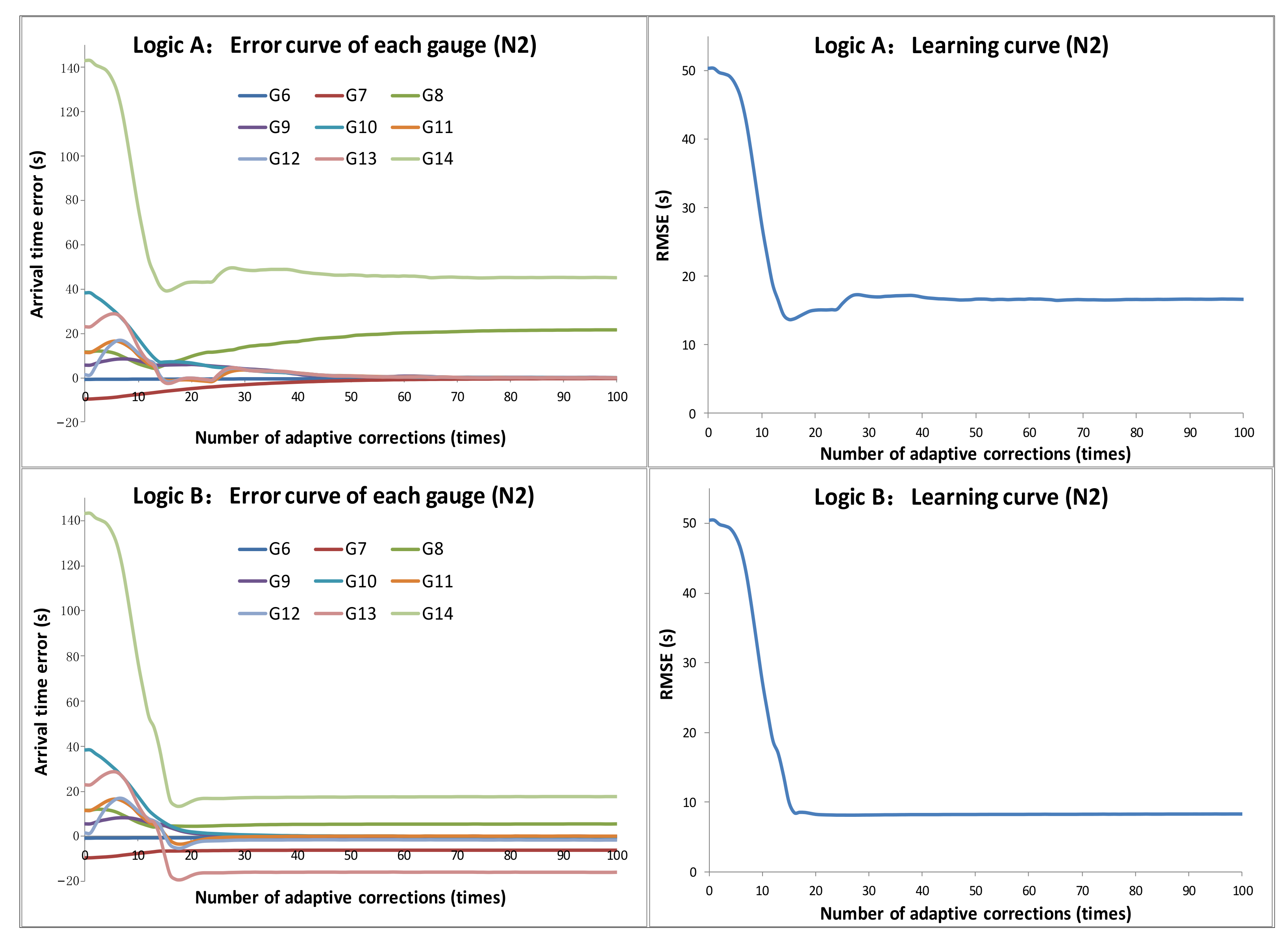
Figure 11.
Error curve and learning curve of each gauge in logic-A and logic-B ().

Figure 12.
Error curve and learning curve of each gauge in logic-B (, ).
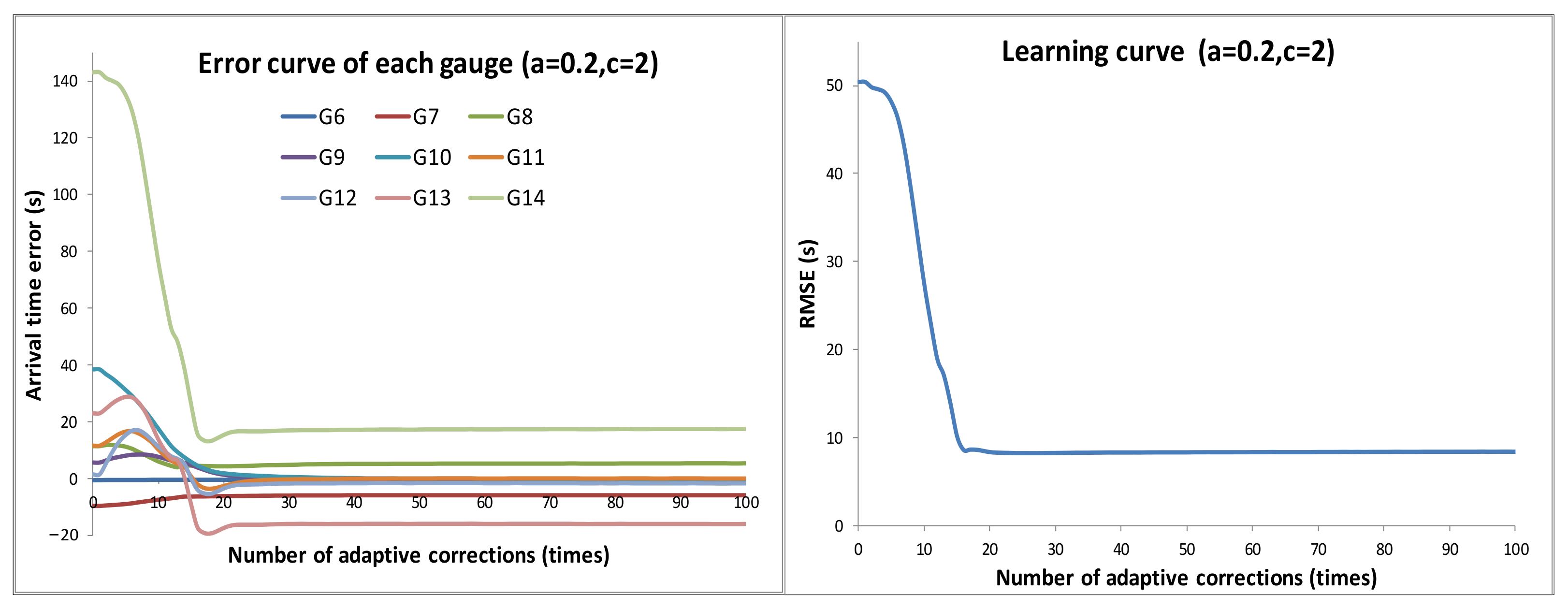
Figure 13.
Error curve and learning curve of each gauge in logic-B (, or 4).
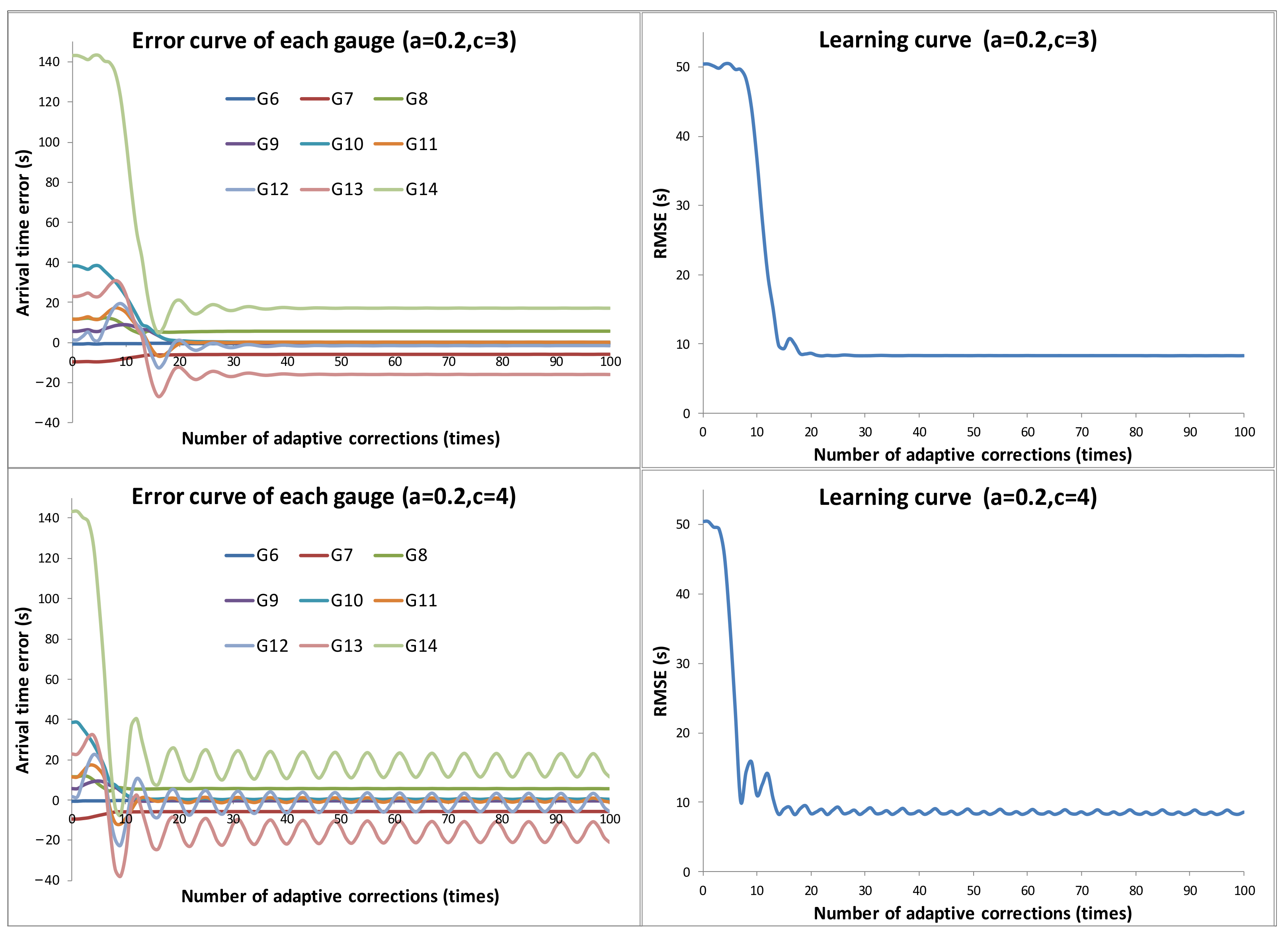
Figure 14.
Error curve and learning curve of each gauge in logic-B (, or 0.5).
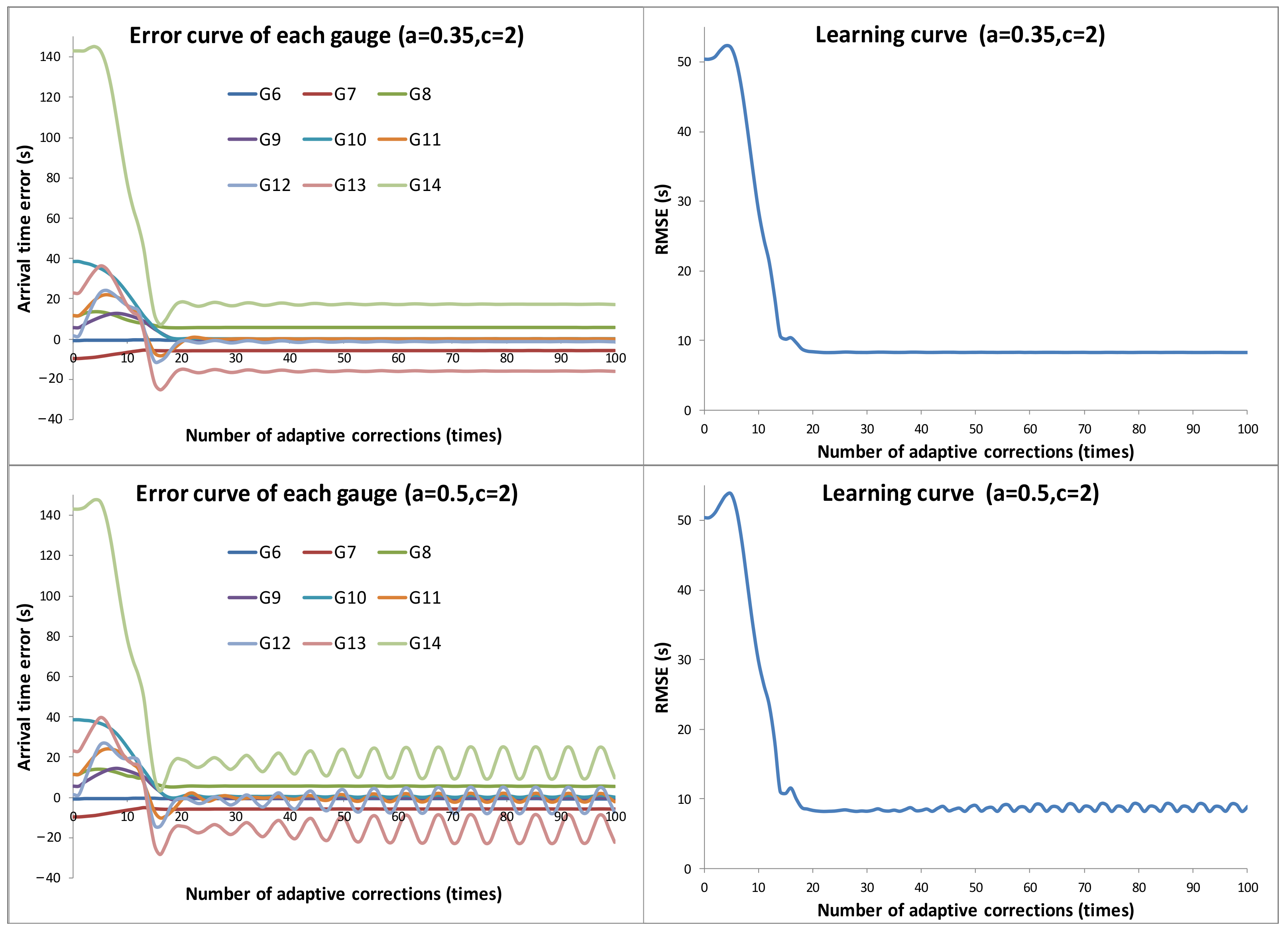
Figure 15.
The water level curve of each gauge during the simulation.
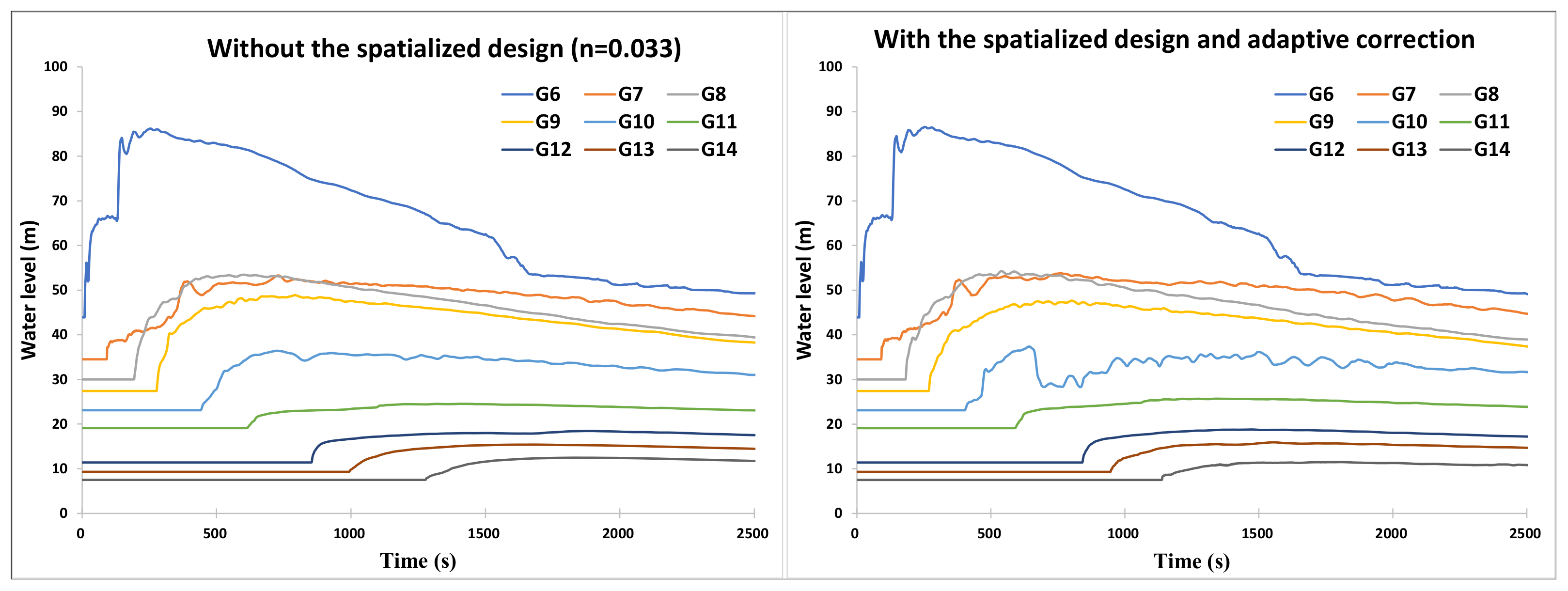
Figure 16.
Arrival time of different numerical simulations on the Malpasset Dam break.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Information sheet of gauges.
| Gauge ID | X (m) | Y (m) | Water Arrival Time (s) | The Max Water Level (m) |
|---|---|---|---|---|
| 6 | 4947.46 | 4289.71 | 9 | 84.2 |
| 7 | 5717.30 | 4407.61 | 100 | 49.1 |
| 8 | 6775.14 | 3869.23 | 180 | 54 |
| 9 | 7128.20 | 3162.00 | 270 | 40.2 |
| 10 | 8585.30 | 3443.08 | 400 | 34.9 |
| 11 | 9674.97 | 3085.89 | 600 | 27.4 |
| 12 | 10,939.15 | 3044.78 | 850 | 21.5 |
| 13 | 11,724.3 | 2810.41 | 970 | 16.1 |
| 14 | 12,723.70 | 2485.08 | 1130 | 12.9 |
Table 2.
Comparing the water arrival time and the max water level.
| G6 | G7 | G8 | G9 | G10 | G11 | G12 | G13 | G14 | ||
|---|---|---|---|---|---|---|---|---|---|---|
| Physical model | Water arrival time (s) | 9.00 | 100.00 | 180.00 | 270.00 | 400.00 | 600.00 | 850.00 | 970.00 | 1130.00 |
| Max. water level (m) | 84.20 | 49.10 | 54.00 | 40.20 | 34.90 | 27.40 | 21.50 | 16.10 | 12.90 | |
| Telemac-2D | Max. water level (m) | 87.97 | 54.43 | 53.25 | 47.91 | 36.51 | 25.37 | 19.13 | 17.65 | 12.76 |
| RE (%) | 4.48 | 10.86 | 1.39 | 19.18 | 4.61 | 7.41 | 11.02 | 9.63 | 1.09 | |
| MRE (%) | 7.74 | |||||||||
| Without the spatialized design (n = 0.033) | Water arrival time (s) | 8.50 | 90.35 | 191.61 | 275.61 | 438.42 | 611.52 | 851.47 | 992.98 | 1273.12 |
| RE (%) | 5.56 | 9.65 | 6.45 | 2.08 | 9.60 | 1.92 | 0.17 | 2.37 | 12.67 | |
| MRE (%) | 5.61 | |||||||||
| Max. water level (m) | 86.18 | 53.29 | 53.45 | 48.87 | 36.41 | 24.53 | 18.45 | 15.40 | 12.47 | |
| RE (%) | 2.35 | 8.53 | 1.01 | 21.56 | 4.33 | 10.49 | 14.17 | 4.37 | 3.36 | |
| MRE (%) | 7.80 | |||||||||
| With the Spatialized design and adaptive correction | Water arrival time (s) | 8.50 | 94.30 | 185.61 | 269.31 | 399.98 | 598.03 | 842.87 | 947.79 | 1139.99 |
| RE (%) | 5.56 | 5.70 | 3.11 | 0.26 | 0.01 | 0.33 | 0.84 | 2.29 | 0.88 | |
| MRE (%) | 2.11 | |||||||||
| Max. water level (m) | 86.55 | 53.77 | 54.29 | 47.65 | 37.38 | 25.69 | 18.79 | 15.92 | 11.50 | |
| RE (%) | 2.79 | 9.52 | 0.53 | 18.53 | 7.11 | 6.25 | 12.61 | 1.14 | 10.87 | |
| MRE (%) | 7.70 | |||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Qiao, C. Research on Parameter Spatialization and Adaptive Correction Models in Fluid Numerical Simulations. Water 2022, 14, 2671. https://doi.org/10.3390/w14172671
AMA Style
Qiao C. Research on Parameter Spatialization and Adaptive Correction Models in Fluid Numerical Simulations. Water. 2022; 14(17):2671. https://doi.org/10.3390/w14172671
Chicago/Turabian StyleQiao, Changjian. 2022. "Research on Parameter Spatialization and Adaptive Correction Models in Fluid Numerical Simulations" Water 14, no. 17: 2671. https://doi.org/10.3390/w14172671
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.