Framework for Dynamic Modelling of the Dam and Reservoir System Reduced Functionality in Adverse Operating Conditions

 ,
,  ,
, 

Abstract
:1. Introduction
2. Materials and Methods
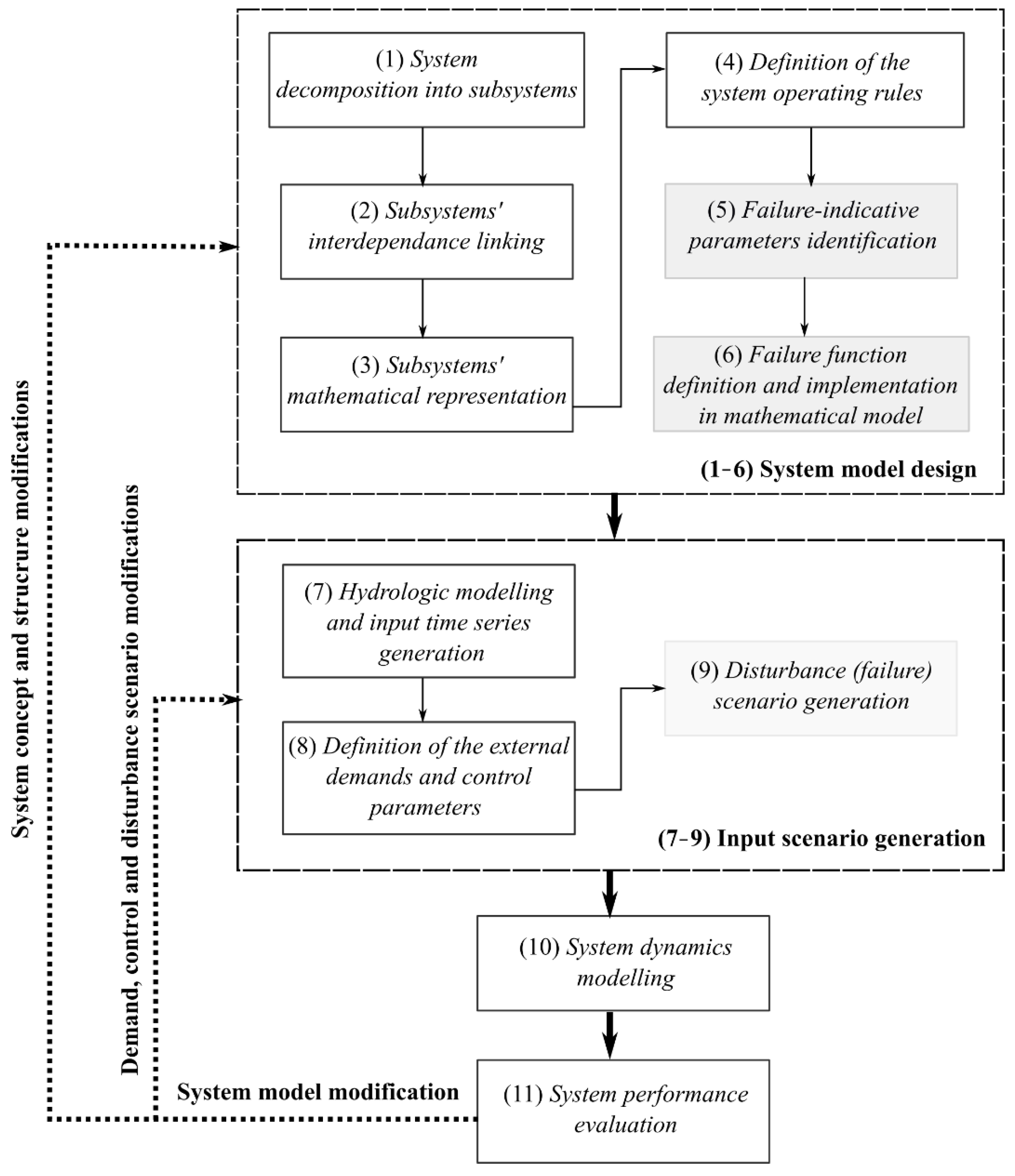
2.1. Framework Overview
2.2. System Model Design
- [m3]—current water volume in storage element (e.g., reservoir, tank) at time t;
- [m]—water level in storage element (e.g., reservoir, tank) at time t;
- [s]—simulation time-step;
- [m3/s]—all the inflows for specific subsystem;
- [m3/s]—all the outflows from specific subsystem;
- [m3/s]—flow in a pressurized pipeline between two storage elements;
- [m3/s]—spillway underflow;
- [m3/s]—seepage flow;
- [m/s2]—acceleration due to gravity;
- [m]—pipeline diameter;
- [/]—Darcy–Weisbach friction coefficient;
- [m]—pipeline length;
- [/]—orifice coefficient;
- [m]—crest length (spillway gate width);
- [m]—spillway gate opening height;
- [m]—reservoir water level;
- [m]—spillway level;
- —seepage coefficient;
- —seepage exponent.
2.2.1. Identification of Failure-Indicative Parameters
2.2.2. Failure Function Definition and Implementation in the Mathematical Model
2.3. Input Scenario Generation
2.4. System Performance Evaluation
2.5. Case Study: Pirot DRS
3. Results
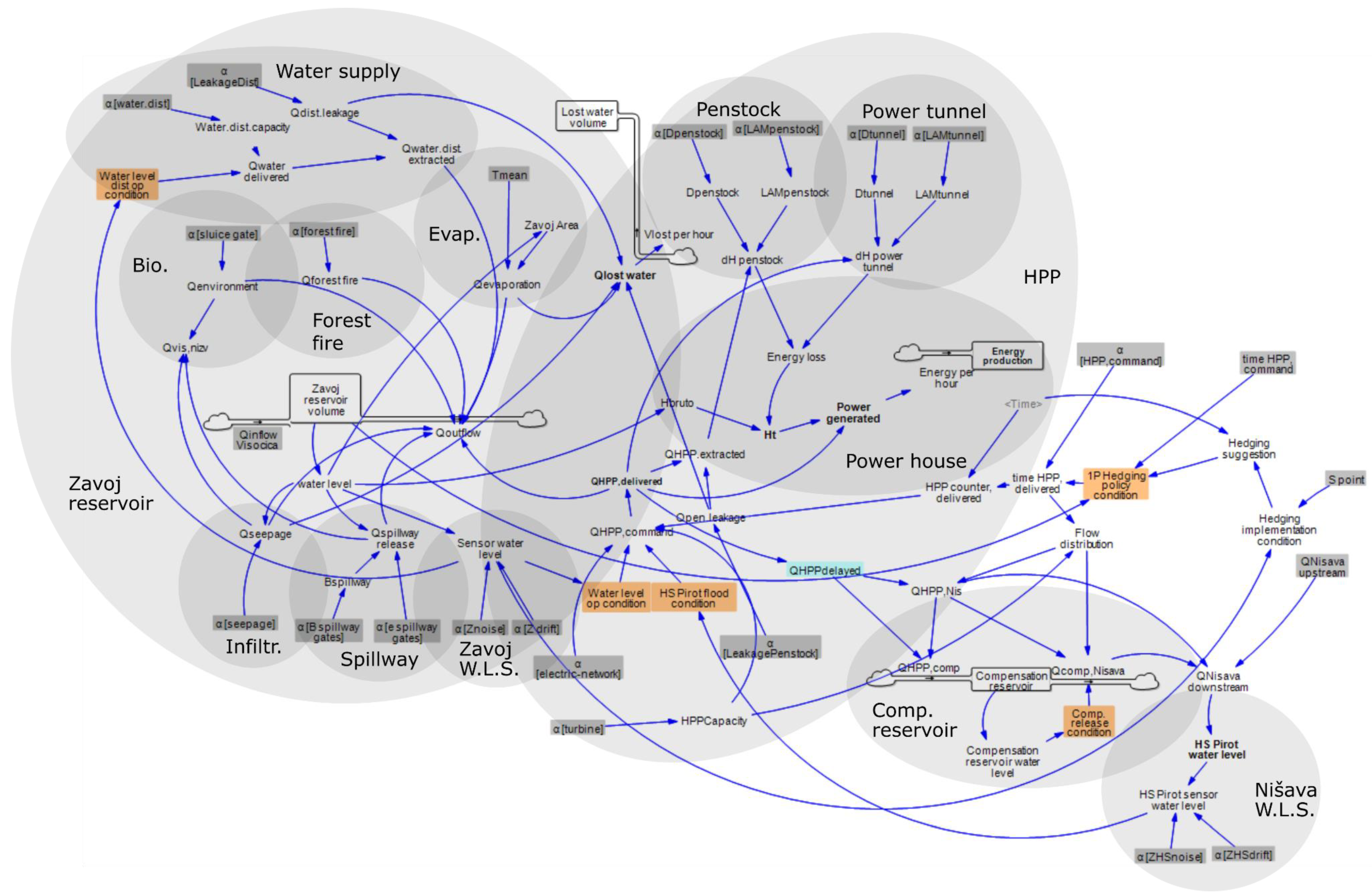
3.1. Pirot DRS Model Design
3.2. Input Scenario Generation for Pirot DRS
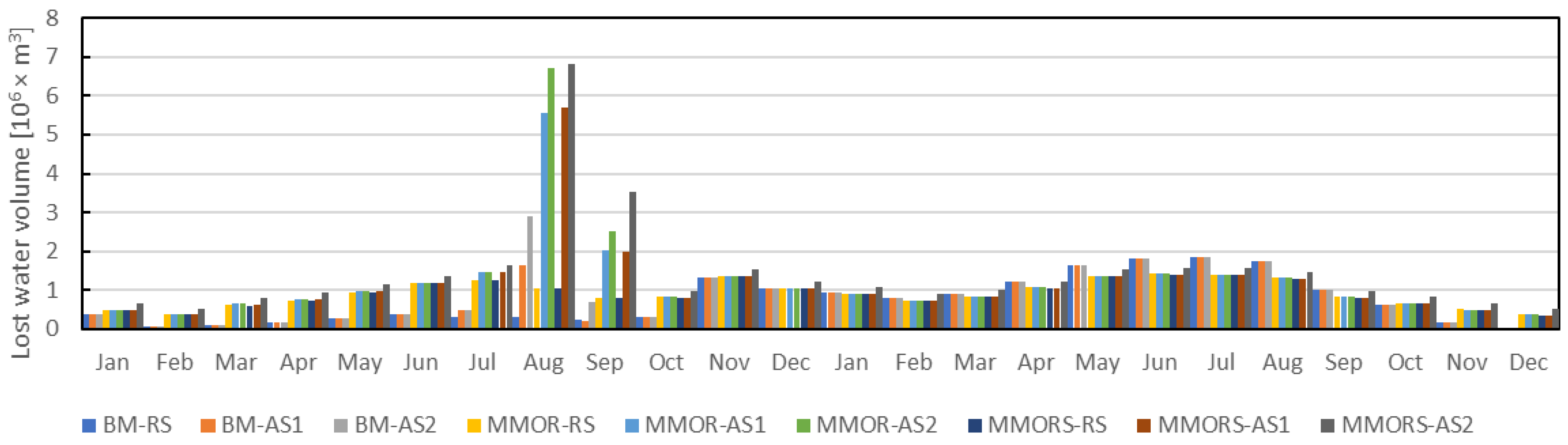
3.3. System Performance in Adverse Operating Conditions
4. Discussion
5. Conclusions
- A Complex DRS model can be decomposed into subsystems, where each subsystem describes a certain process or input/output transformation and interaction with other subsystems. Depending on the SD modelling goals, different forms of hierarchical DRS decomposition can be applied with varying levels of detail;
- With the identification of the failure-indicative parameters, definition and implementation of failure functions using generic functionality indicator as a variable, a wide variety of DRS disturbances, and respective disturbance and failure dynamics, can be modelled (physical damage, increase of measurement uncertainty, procurement of the spare parts, etc.);
- The flexibility of the proposed approach allows for the further development of the failure functions and modes, which can be used in the DRS behavior analysis in adverse operating conditions;
- The suggested framework can serve as guide for DRS SD model design, input-scenario generation, performance simulation and posteriori model modifications. However, it does not provide a solution for the modelling task;
- The dependability of SD modelling in respect to human expert knowledge remains a challenge. The modeler should be able to quantify the uncertainties related to the quantification of the failure-related parameters and control them in the modelling process.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- DeNeale, S.T.; Baecher, G.B.; Stewart, K.M.; Smith, E.D.; Watson, D.B. Current State-of-Practice in Dam Safety Risk Assessment; (No. ORNL/TM-2019/1069); Oak Ridge National Lab. (ORNL): Oak Ridge, TN, USA, 2019. [Google Scholar]
- Winz, I.; Brierley, G.; Trowsdale, S. The Use of System Dynamics Simulation in Water Resources Management. Water Resour. Manag. 2008, 23, 1301–1323. [Google Scholar] [CrossRef]
- King, L.M.; Schardong, A.; Simonovic, S.P. A Combinatorial Procedure to Determine the Full Range of Potential Operating Scenarios for a Dam System. Water Resour. Manag. 2019, 33, 1451–1466. [Google Scholar] [CrossRef]
- CDA (Canadian DamAssociation). Available online: https://cda.ca/dams-in-canada/dams-in-canada (accessed on 26 March 2022).
- Fema, M. Federal Guidelines for Dam Safety Risk Management; Federal Emergency Management Agency: Washington, DC, USA, 2015. [Google Scholar]
- Chernet, H.H.; Alfredsen, K.; Midttømme, G.H. Safety of Hydropower Dams in a Changing Climate. J. Hydrol. Eng. 2014, 19, 569–582. [Google Scholar] [CrossRef]
- Li, W.; Li, Z.; Ge, W.; Wu, S. Risk Evaluation Model of Life Loss Caused by Dam-break Flood and Its Application. Water 2019, 11, 1359. [Google Scholar] [CrossRef] [Green Version]
- Đorđević, B.; Dašić, T.; Plavšić, J. Uticaj klimatskih promena na vodoprivredu Srbije i mere koje treba preduzimati u cilju zaštite od negativnih uticaja (in Serbian). Vodoprivreda 2020, 52, 39–68. Available online: https://www.vodoprivreda.net/wp-content/uploads/2020/12/3-Djordjevic-Dasic-Plavsic.pdf (accessed on 26 March 2022).
- Badr, A.; Yosri, A.; Hassini, S.; El-Dakhakhni, W. Coupled Continuous-Time Markov Chain–Bayesian Network Model for Dam Failure Risk Prediction. J. Infrastruct. Syst. 2021, 27, 04021041. [Google Scholar] [CrossRef]
- Srivastava, A. A Computational Framework for Dam Safety Risk Assessment with Uncertainty Analysis. Ph.D. Thesis, Utah State University, Logan, UT, USA, 2013. [Google Scholar]
- Nápoles, O.M.; Delgado-Hernández, D.J.; De-León-Escobedo, D.; Arteaga-Arcos, J.C. A continuous Bayesian network for earth damsߣ risk assessment: Methodology and quantification. Struct. Infrastruct. Eng. 2013, 10, 589–603. [Google Scholar] [CrossRef]
- Delgado-Hernández, D.-J.; Nápoles, O.M.; De-León-Escobedo, D.; Arteaga-Arcos, J.C. A continuous Bayesian network for earth dams’ risk assessment: An application. Struct. Infrastruct. Eng. 2012, 10, 225–238. [Google Scholar] [CrossRef]
- Hartford, D.N.; Baecher, G.B. Risk and Uncertainty in Dam Safety; Thomas Telford Ltd.: London, UK, 2004. [Google Scholar]
- Jiang, J.P.; Yang, Z.H. Laws of dam failures of small-sized reservoirs and countermeasures. Chin. J. Geotech. Eng. 2008, 30, 1626–1631. [Google Scholar]
- Zhang, L.; Xu, Y.; Jia, J. Analysis of earth dam failures: A database approach. Georisk: Assess. Manag. Risk Eng. Syst. Geohazards 2009, 3, 184–189. [Google Scholar] [CrossRef] [Green Version]
- Cleary, P.; Prakash, M.; Mead, S.; Lemiale, V.; Robinson, G.K.; Ye, F.; Ouyang, S.; Tang, X. A scenario-based risk framework for determining consequences of different failure modes of earth dams. Nat. Hazards 2014, 75, 1489–1530. [Google Scholar] [CrossRef]
- Andreini, M.; Gardoni, P.; Pagliara, S.; Sassu, M. Probabilistic Models for Erosion Parameters and Reliability Analysis of Earth Dams and Levees. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2016, 2, 04016006. [Google Scholar] [CrossRef]
- Ribas, J.R.; Severo, J.C.R.; Guimarães, L.F.; Perpetuo, K.P.C. A fuzzy FMEA assessment of hydroelectric earth dam failure modes: A case study in Central Brazil. Energy Rep. 2021, 7, 4412–4424. [Google Scholar] [CrossRef]
- King, L.M.; Simonovic, S.P.; Hartford, D.N.D. Using system dynamics simulation for assessment of hydropower system safety. Water Resour. Res. 2017, 53, 7148–7174. [Google Scholar] [CrossRef]
- King, L.M. Using a Systems Approach to Analyze the Operational Safety of Dams. Ph.D. Thesis, University of Western Ontario, London, ON, Canada, 2020. [Google Scholar]
- Rakić, D.; Stojković, M.; Ivetić, D.; Živković, M.; Milivojević, N. Failure Assessment of Embankment Dam Elements: Case Study of the Pirot Reservoir System. Appl. Sci. 2022, 12, 558. [Google Scholar] [CrossRef]
- Stowasser, E. L Dam failure system modeling in the muskingum watershed—Beach City Dam. In Proceedings of the 31st Annual USSD Conference, San Diego, CA, USA, 11–15 April 2011. [Google Scholar]
- Haimes, Y.Y.; Petrakian, R.; Karlsson, P.O.; Mitsiopoulos, J. Multiobjective Risk Partitioning: An Application to Dam Safety Risk Analysis; Environmental systems management, Inc.: Charlottesville, VA, USA, 1988. [Google Scholar]
- Baecher, G.; Ascila, R.; Hartford, D.N.D. Hydropower and dam safety. In Proceedings of the STAMP/STPA Workshop, Cambridge, MA, USA, 26 March 2013. [Google Scholar]
- Regan, P.J. Dams as systems-a holistic approach to dam safety. In Proceedings of the 30th Annual USSD Conference, Sacramento, CA, USA, 12–16 April 2010; pp. 554–563. [Google Scholar]
- Leveson, N.G. Engineering a Safer World: Systems Thinking Applied to Safety; The MIT Press: Cambridge, MA, USA, 2011; p. 560. [Google Scholar]
- Thomas, J.P., IV. Extending and Automating a Systems—Theoretic Hazard Analysis for Requirements Generation and Analysis. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2013. [Google Scholar]
- Komey, A.; Deng, Q.; Baecher, G.B.; Zielinski, P.A.; Atkinson, T. Systems reliability of flow control in dam safety. In Proceedings of the 12th International Conference on Application of Statistics and Probability in Civil Engineering, ICASP12, Vancouver, BC, Canada, 12–15 July 2015; pp. 1–8. [Google Scholar]
- Komey, A. A Systems Reliability Approach to Flow Control in Dam Safety Risk Analysis. Ph.D. Thesis, University of Maryland, College Park, MD, USA, 2014. [Google Scholar]
- Hartford, D.; Baecher, G.; Zielinski, P.; Patev, R. Operational Safety of Dams and Reservoirs—Understanding the Reliability of Flow-Control Systems; ICE Publishing: London, UK, 2016. [Google Scholar]
- Simonovic, S.P.; Arunkumar, R. Comparison of static and dynamic resilience for a multipurpose reservoir operation. Water Resour. Res. 2016, 52, 8630–8649. [Google Scholar] [CrossRef]
- Stojkovic, M.; Simonovic, S.P. System Dynamics Approach for Assessing the Behaviour of the Lim Reservoir System (Serbia) under Changing Climate Conditions. Water 2019, 11, 1620. [Google Scholar] [CrossRef] [Green Version]
- Simonovic, S.P. Application of the Systems Approach to the Management of Complex Water Systems. Water 2020, 12, 2923. [Google Scholar] [CrossRef]
- Ignjatović, L.; Stojković, M.; Ivetić, D.; Milašinović, M.; Milivojević, N. Quantifying Multi-Parameter Dynamic Resilience for Complex Reservoir Systems Using Failure Simulations: Case Study of the Pirot Reservoir System. Water 2021, 13, 3157. [Google Scholar] [CrossRef]
- Hashimoto, T.; Stedinger, J.R.; Loucks, D.P. Reliability, resiliency, and vulnerability criteria for water resource system performance evaluation. Water Resour. Res. 1982, 18, 14–20. [Google Scholar] [CrossRef] [Green Version]
- Behboudian, M.; Kerachian, R.; Pourmoghim, P. Evaluating the long-term resilience of water resources systems: Application of a generalized grade-based combination approach. Sci. Total Environ. 2021, 786, 147447. [Google Scholar] [CrossRef]
- Tayebiyan, A.; Mohammad, T.A.; Al-Ansari, N.; Malakootian, M. Comparison of Optimal Hedging Policies for Hydropower Reservoir System Operation. Water 2019, 11, 121. [Google Scholar] [CrossRef] [Green Version]
- Vensim-Ventana Systems Inc. Available online: https://vensim.com/docs/ (accessed on 26 March 2022).
- Linacre, E.T. A simple formula for estimating evaporation rates in various climates, using temperature data alone. Agric. Meteorol. 1977, 18, 409–424. [Google Scholar] [CrossRef]
- Eurostat-European Commission. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php?title=Electricity_price_statistics (accessed on 26 March 2022).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subsystem | Mathematical Representation | Failure-Indicative Parameter(s) |
|---|---|---|
| Embankment | Equation (6) | Seepage coefficient K |
| Spillway (underflow) | Equation (5) | Spillway opening width B and/or spillway gate opening height e |
| Power tunnel, penstock | Equation (4) | Diameter D and/or friction coefficient λ |
| Power tunnel, penstock (leakage) | ||
| HPP (powerhouse) | Equation (2) | |
| Water-level sensor | Equation (7) | |
| Maintenance unit | / |
| Model Variants | (BM) Basic Model | (MMOR) Model—Modified Operating Rules | (MMORS) Model—Modified Operating Rules and Structure |
|---|---|---|---|
| Scenarios | |||
| (RS) Regular Scenario—no disturbances | BM-RS | MMOR-RS | MMORS-RS |
| (AS1) Adverse scenario 1—physical disturbances | BM-AS1 | MMOR-AS1 | MMORS-AS1 |
| (AS2) Adverse scenario 2—physical disturbances + global crisis | BM-AS2 | MMOR-AS2 | MMORS-AS2 |
| Subsystem | Failure-Indicative Parameter | Failure Functions | Failure Functions Implementation | Adverse Scenario 1 (AS1) | Adverse Scenario 2 (AS2) |
|---|---|---|---|---|---|
| Biological | (E1) | (E1) | |||
| Seepage | Equation (12) | (E1, E2) | (E1, E2) | ||
| Spillway | Equation (11) | (E1, E2) | (E1, E2) | ||
| Firefighting extraction | Equation (16) | (FF1, FF2) | (FF1, FF2) | ||
| Power tunnel | Equation (17) | ||||
| Equation (17) | |||||
| Penstock | Equation (17) | (E1) | (E1) | ||
| Equation (17) | (E1, E2) | (E1, E2) | |||
| Equation (15) | (E1, E2) | (E1, E2) | |||
| Powerhouse | Equation (15) | (F) | (F) | ||
| Equation (18) | (E2) | (E2) | |||
| Zavoj water-level sensor | Equation (13) | ||||
| Equation (13) | (WLSZD) | (WLSZD) | |||
| Nišava water-level sensor | Equation (13) | ||||
| Equation (13) | |||||
| Maintenance unit | subsystem; k-failure) | (GMC) | |||
| subsystem; k-failure) | (GMC) | ||||
| Water distribution extraction | * (E1, E2) | * (E1, E2) | |||
| * (E1, E2) | * (E1, E2) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ivetić, D.; Milašinović, M.; Stojković, M.; Šotić, A.; Charbonnier, N.; Milivojević, N. Framework for Dynamic Modelling of the Dam and Reservoir System Reduced Functionality in Adverse Operating Conditions. Water 2022, 14, 1549. https://doi.org/10.3390/w14101549
Ivetić D, Milašinović M, Stojković M, Šotić A, Charbonnier N, Milivojević N. Framework for Dynamic Modelling of the Dam and Reservoir System Reduced Functionality in Adverse Operating Conditions. Water. 2022; 14(10):1549. https://doi.org/10.3390/w14101549
Chicago/Turabian StyleIvetić, Damjan, Miloš Milašinović, Milan Stojković, Aleksandar Šotić, Nicolas Charbonnier, and Nikola Milivojević. 2022. "Framework for Dynamic Modelling of the Dam and Reservoir System Reduced Functionality in Adverse Operating Conditions" Water 14, no. 10: 1549. https://doi.org/10.3390/w14101549
APA StyleIvetić, D., Milašinović, M., Stojković, M., Šotić, A., Charbonnier, N., & Milivojević, N. (2022). Framework for Dynamic Modelling of the Dam and Reservoir System Reduced Functionality in Adverse Operating Conditions. Water, 14(10), 1549. https://doi.org/10.3390/w14101549