
Deep Learning with Long Short Term Memory Based Sequence-to-Sequence Model for Rainfall-Runoff Simulation



Abstract
1. Introduction
2. Materials and Methods
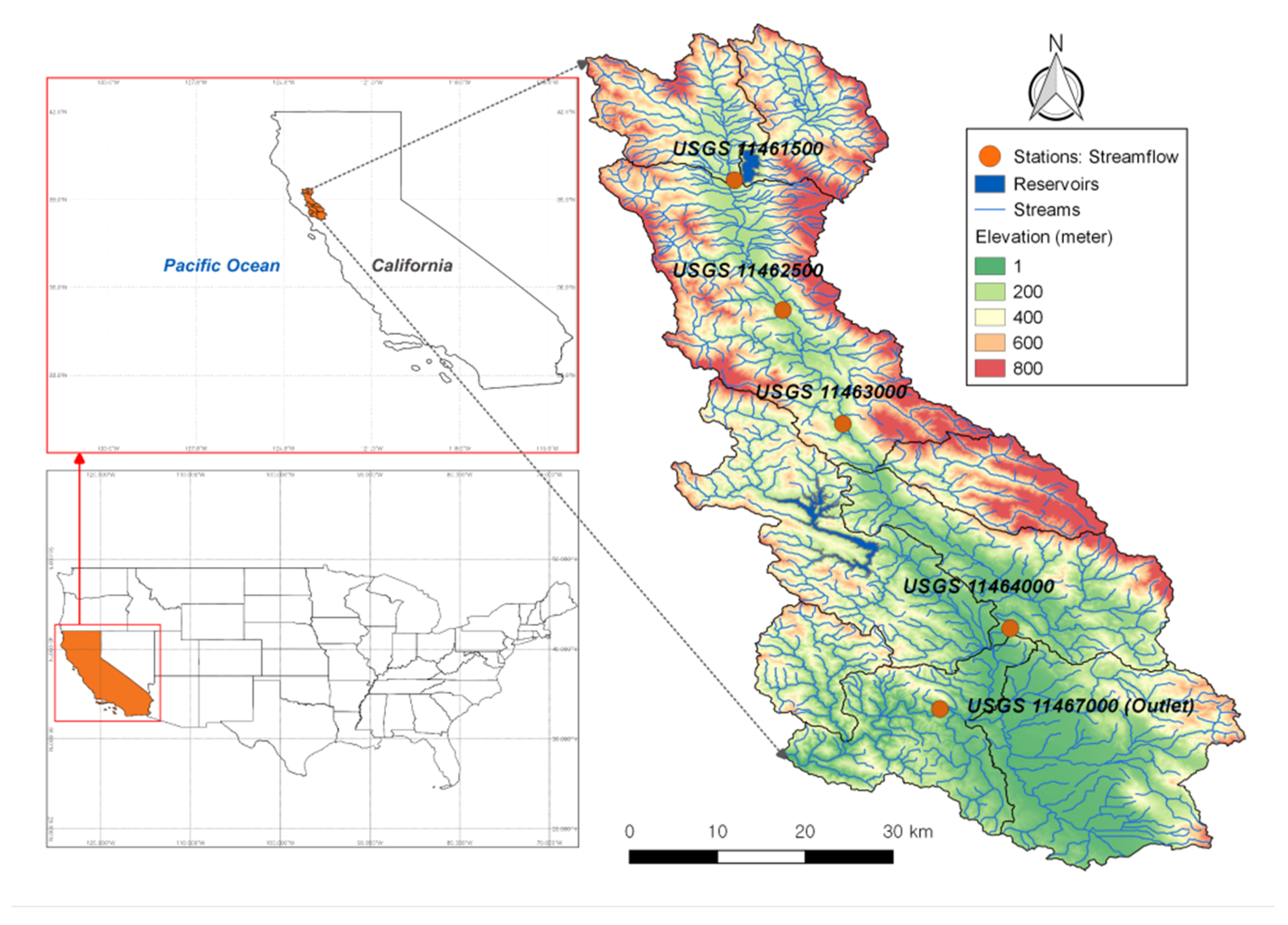
2.1. Study Area and Data
2.2. Data-Driven Models
2.2.1. Support Vector Machine
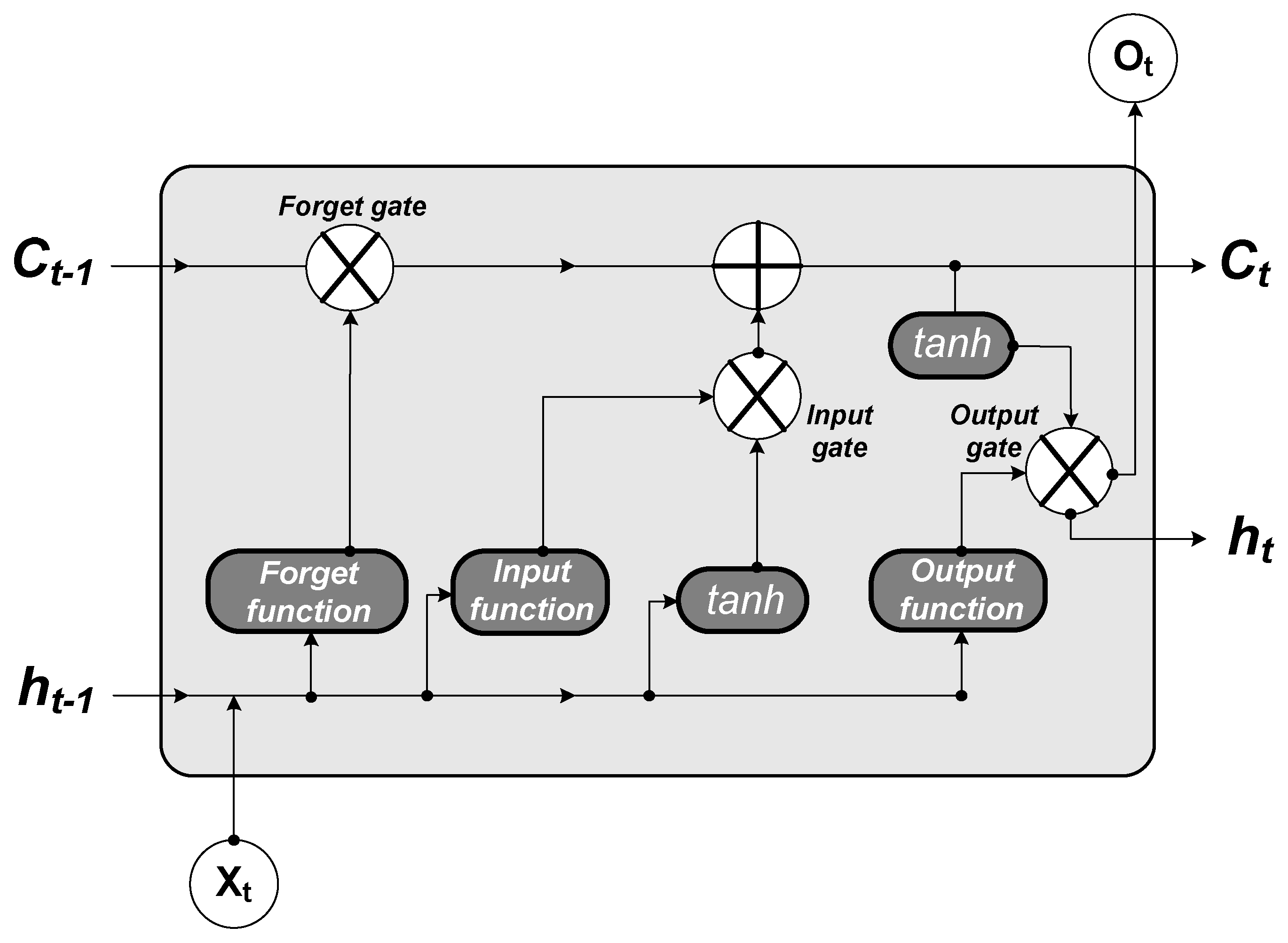
2.2.2. Long Short-Term Memory
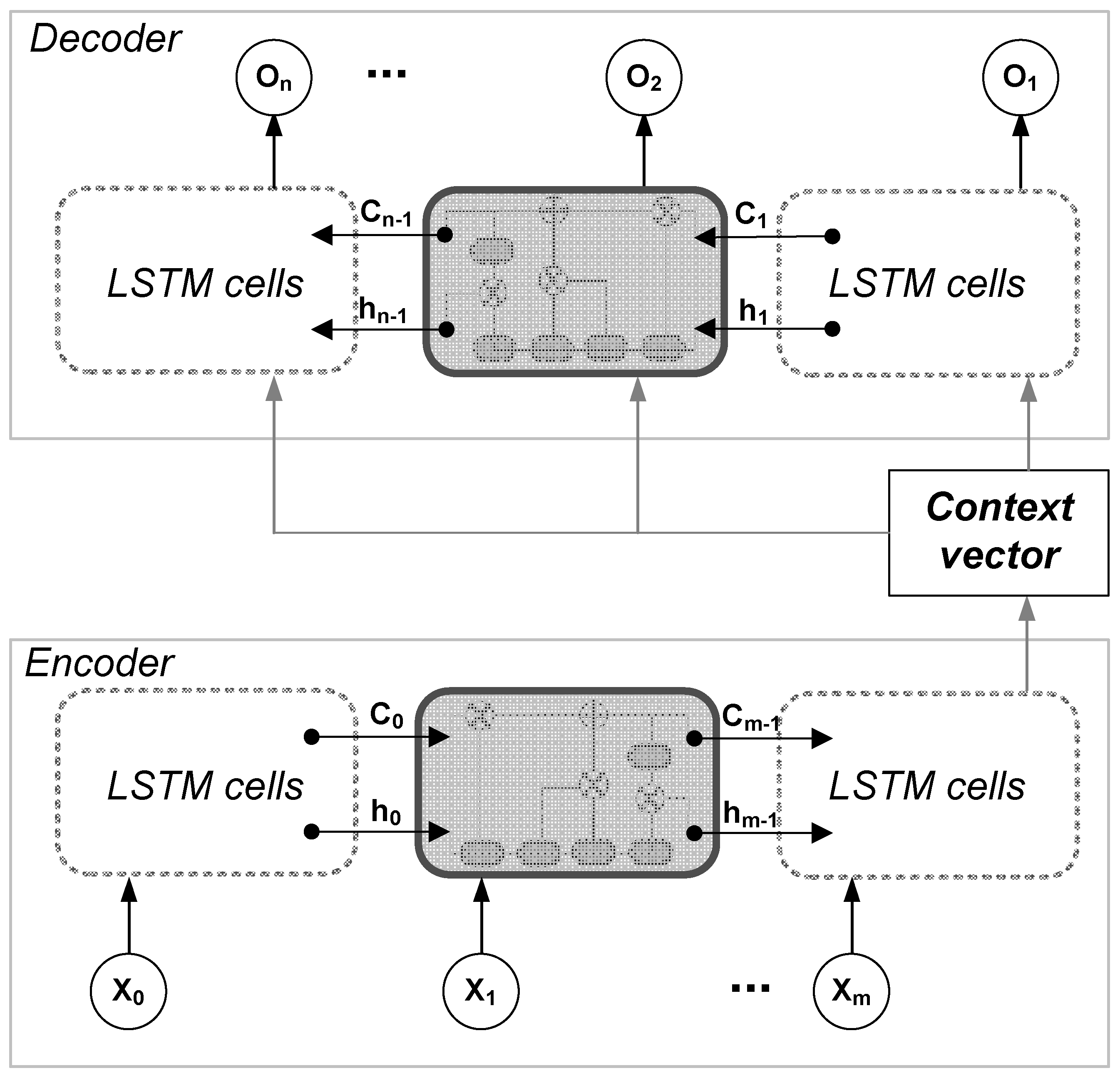
2.2.3. LSTM with Seq2Seq Model
2.3. Model Development
2.3.1. SVM Model Setup
2.3.2. LSTM-s2s Model Setup
2.3.3. Model Design
2.4. Evaluation Criteria
3. Results and Discussions
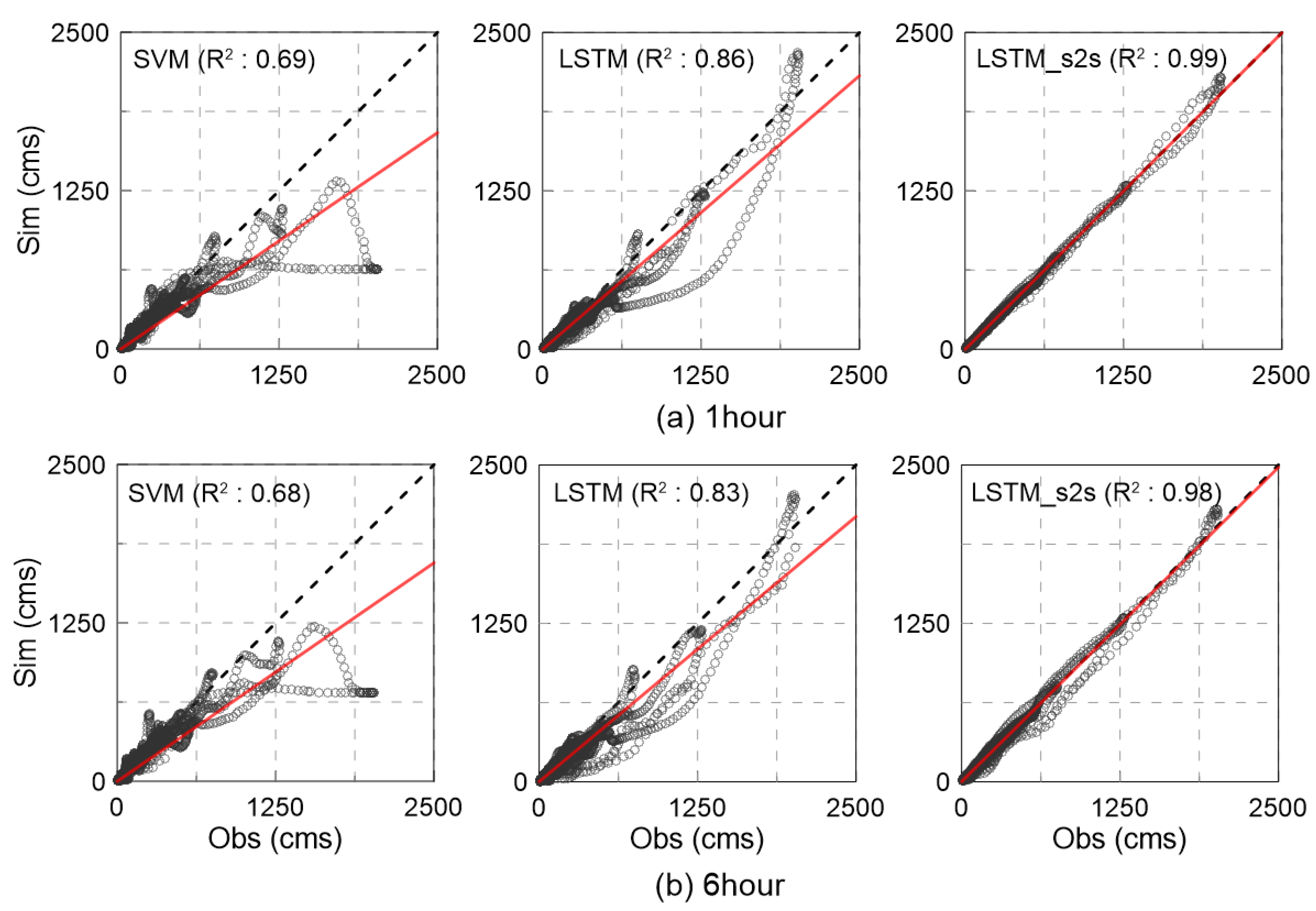
3.1. Overall Performances of Data-Driven Models
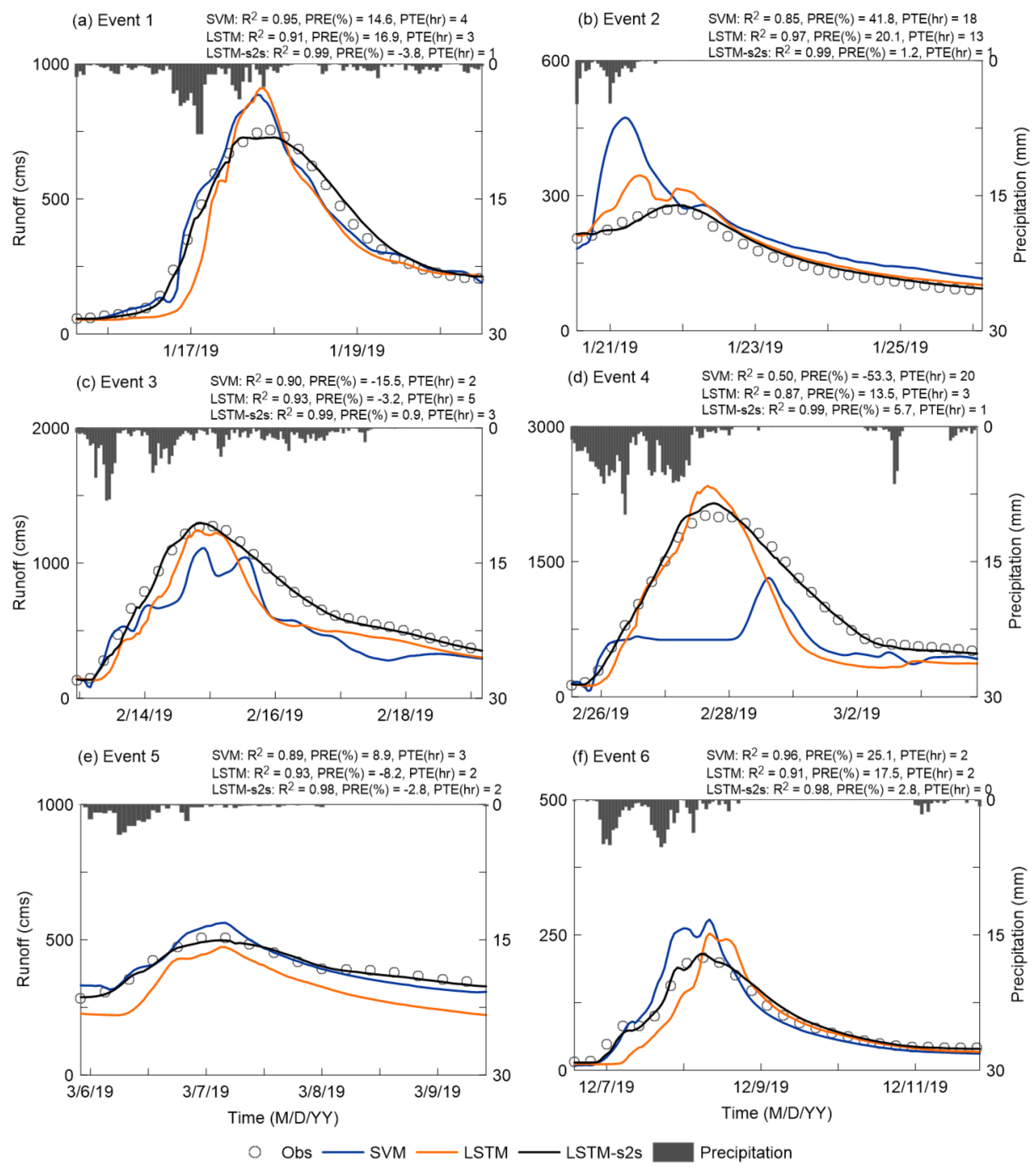
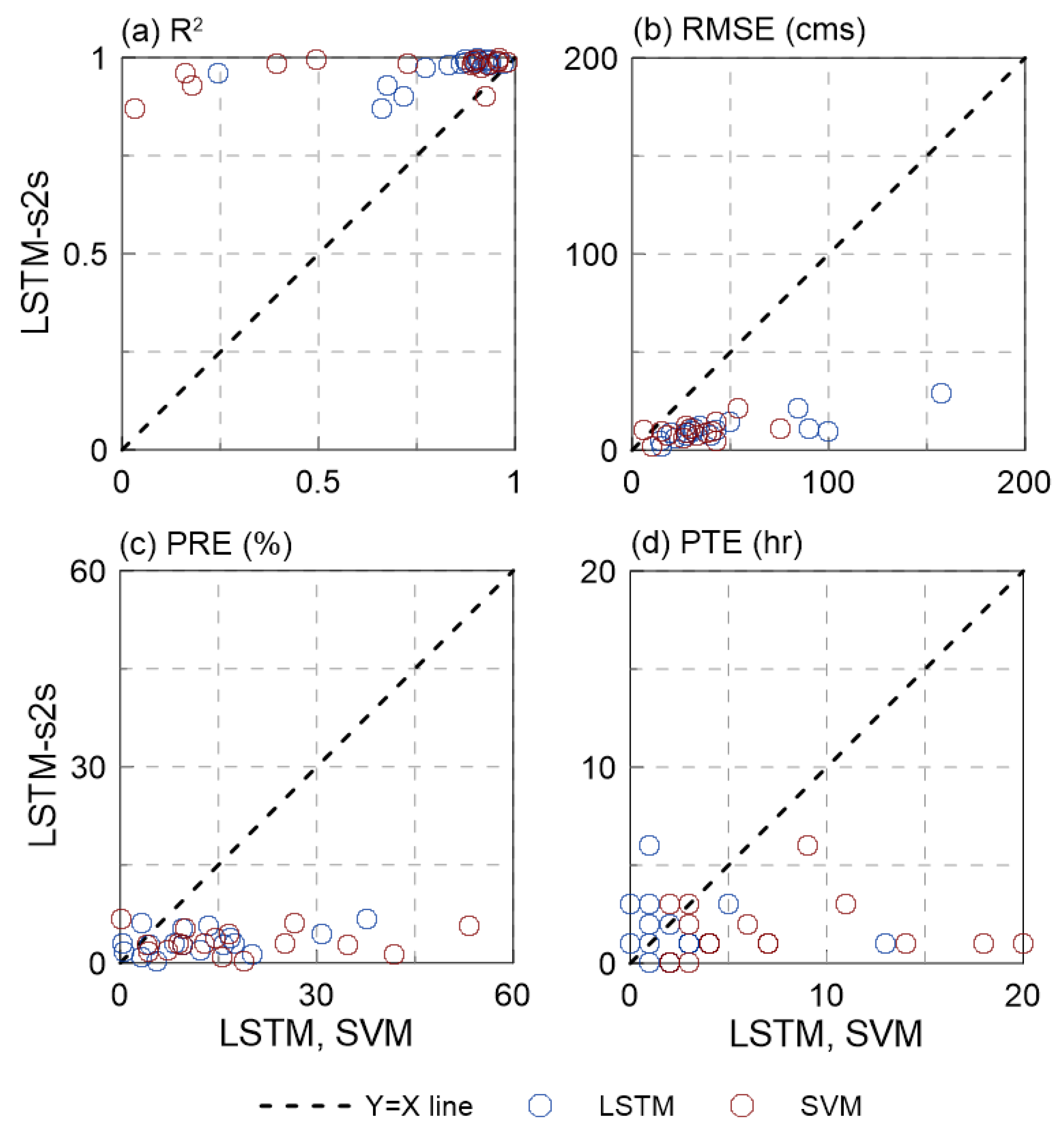
3.2. Event Based Evaluation
4. Conclusions
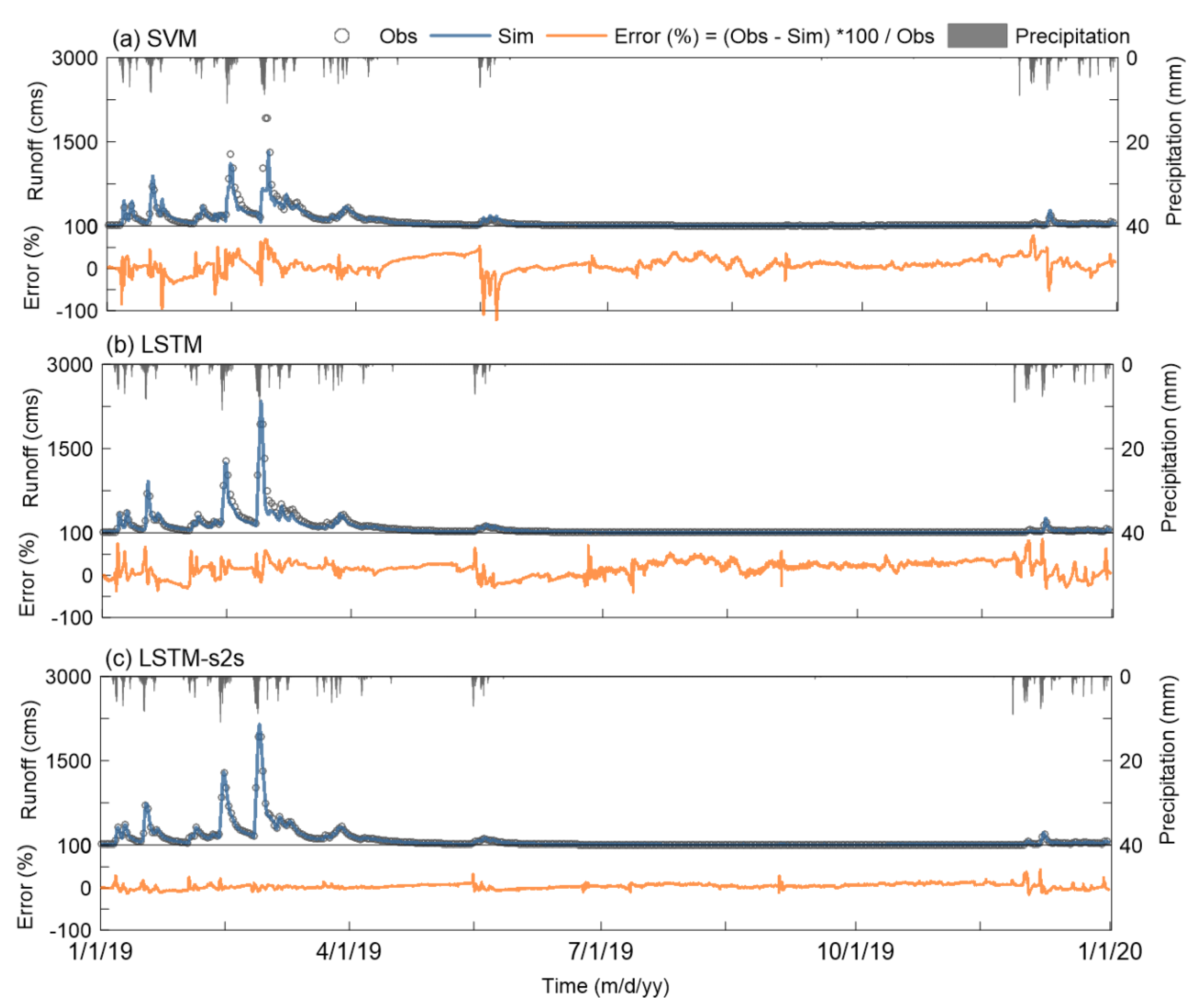
- The LSTM-s2s model outperformed the LSTM and SVM models for 1 to 6 h of lead time. The LSTM-s2s model provided high performance in predicting hourly runoff variability and volume compared to the observed runoff. In addition, the error in simulated runoff was relatively low compared to the other two models. The R2 values were over 0.98–0.99 for LSTM-s2s, 0.83–0.86 for LSTM, and 0.68–0.69 for SVM models. The evaluation metrics showed that all three models were suitable for runoff forecasting, but the LSTM-s2s model was the best.
- Seventeen runoff events were separated by three models during the study periods. Similar to the results of overall evaluation, the LSTM-s2s model was the best at predicted runoff events compared to both LSTM and SVM models. The LSTM-s2s model not only showed high performance in predicting peak time and peak runoff value with PRE and PTE values of 3.1% and 1.5 h indicating the predicted runoff event has very low error rates in peak time and value compared to the observations.
- The results of this study represent that machine learning and deep learning approaches such as SVM- and LSTM-based models can be effective alternatives to physics-based hydrological models, which require complex simulation processes for runoff forecasting. Among the three models, the LSTM-s2s model showed the best performance and it was found that this model can be effectively used for hourly runoff forecasting, which is important for developing flood forecasting and warning system.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Napolitano, G.; Serinaldi, F.; See, L. Impact of EMD decomposition and random initialisation of weights in ANN hindcasting of daily stream flow series: An empirical examination. J. Hydrol. 2011, 406, 199–214. [Google Scholar] [CrossRef]
- Young, C.-C.; Liu, W.-C. Prediction and modelling of rainfall–runoff during typhoon events using a physically-based and artificial neural network hybrid model. Hydrol. Sci. J. 2015, 60, 2102–2116. [Google Scholar] [CrossRef]
- Fan, H.; Jiang, M.; Xu, L.; Zhu, H.; Cheng, J.; Jiang, J. Comparison of Long Short Term Memory Networks and the Hydro-logical Model in Runoff Simulation. Water 2020, 12, 175. [Google Scholar] [CrossRef]
- Xiang, Z.; Yan, J.; Demir, I. A Rainfall-Runoff Model with LSTM-Based Sequence-to-Sequence Learning. Wat. Resour. Res. 2020, 56. [Google Scholar] [CrossRef]
- Wu, Z.Y.; Lu, G.H.; Wen, L.; Lin, C.A. Reconstructing and analyzing China’s fifty-nine year (1951–2009) drought history using hydrological model simulation. Hydrol. Earth Syst. Sci. Discuss. 2011, 8, 1861–1893. [Google Scholar]
- Kang, H.; Sridhar, V. Combined statistical and spatially distributed hydrological model for evaluating future drought indices in Virginia. J. Hydrol. Reg. Stud. 2017, 12, 253–272. [Google Scholar] [CrossRef]
- Wang, J.; Shi, P.; Jiang, P.; Hu, J.; Qu, S.; Chen, X.; Xiao, Z. Application of BP neural network algorithm in traditional hydrological model for flood forecasting. Water 2017, 9, 48. [Google Scholar] [CrossRef]
- Hu, C.; Wu, Q.; Li, H.; Jian, S.; Li, N.; Lou, Z. Deep Learning with a Long Short-Term Memory Networks Approach for Rain-fall-Runoff Simulation. Water 2018, 10, 1543. [Google Scholar] [CrossRef]
- Nash, L.L.; Gleick, P.H. Sensitivity of streamflow in the Colorado Basin to climatic changes. J. Hydrol. 1991, 125, 221–241. [Google Scholar] [CrossRef]
- Vogel, R.M.; Wilson, I.; Daly, C. Regional Regression Models of Annual Streamflow for the United States. J. Irrig. Drain. Eng. 1999, 125, 148–157. [Google Scholar] [CrossRef]
- Bicknell, B.R.; Imhoff, J.C.; Kittle, J.L.; Donigian, A.S.; Johanson, R.C. Hydrological Simulation Program-FORTRAN. User’s Manual for Release 11; USEPA: Athens, GA, USA, 1997.
- Kim, B.K.; Kim, S.D.; Lee, E.T.; Kim, H.S. Methodology for estimating ranges of SWAT model parameters: Application to Imha Lake inflow and suspended sediments. J. Korean Soc. Civ. Eng. 2007, 27, 661–668. [Google Scholar]
- Neitsch, S.L.; Arnold, J.G.; Kiniry, J.R.; Williams, J.R. Soil and Water Assessment Tool Theoretical Documentation Version 2009; Texas Water Resources Institute Technical Report No. 406; Texas A&M University System: College Station, TX, USA, 2011. [Google Scholar]
- Devia, G.K.; Ganasri, B.; Dwarakish, G. A Review on Hydrological Models. Aquat. Procedia 2015, 4, 1001–1007. [Google Scholar] [CrossRef]
- Noh, H.; Lee, J.; Kang, N.; Lee, D.; Kim, H.S.; Kim, S. Long-Term Simulation of Daily Streamflow Using Radar Rainfall and the SWAT Model: A Case Study of the Gamcheon Basin of the Nakdong River, Korea. Adv. Meteorol. 2016, 2016, 1–12. [Google Scholar] [CrossRef]
- Mosavi, A.; Ozturk, P.; Chau, K.-W. Flood Prediction Using Machine Learning Models: Literature Review. Water 2018, 10, 1536. [Google Scholar] [CrossRef]
- McCulloch, W.S.; Pitts, W. A logical calculus of the ideas immanent in nervous activity. Bull. Math. Biol. 1943, 5, 115–133. [Google Scholar] [CrossRef]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1995. [Google Scholar]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees; Chapman and Hall/CRC: Boca Raton, FL, USA, 1984. [Google Scholar]
- LeCun, Y.; Haffner, P.; Bottou, L.; Bengio, Y. Object Recognition with Gradient-Based Learning. In Shape, Contour and Grouping in Computer Vision; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 1999; Volume 1681, pp. 319–345. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nat. Cell Biol. 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Feng, D.; Fangi, D.K.; Shen, C. Enhancing Streamflow Forecast and Extracting Insights Using Long-Short Term Memory Networks With Data Integration at Continental Scales. Water Resour. Res. 2020, 56, 026793. [Google Scholar] [CrossRef]
- Solomatine, D.P.; Ostfeld, A. Data-driven modelling: Some past experiences and new approaches. J. Hydroinformatics 2008, 10, 3–22. [Google Scholar] [CrossRef]
- Solomatine, D.P.; Dulal, K.N. Model trees as an alternative to neural networks in rainfall—Runoff modelling. Hydrol. Sci. J. 2003, 48, 399–411. [Google Scholar] [CrossRef]
- Jothiprakash, V.; Magar, R. Multi-time-step ahead daily and hourly intermittent reservoir inflow prediction by artificial intelligent techniques using lumped and distributed data. J. Hydrol. 2012, 2012, 293–307. [Google Scholar] [CrossRef]
- Lin, G.-F.; Jhong, B.-C.; Chang, C.-C. Development of an effective data-driven model for hourly typhoon rainfall forecasting. J. Hydrol. 2013, 495, 52–63. [Google Scholar] [CrossRef]
- Ba, H.; Guo, S.; Wang, Y.; Hong, X.; Zhong, Y.; Liu, Z. Improving ANN model performance in runoff forecasting by adding soil moisture input and using data preprocessing techniques. Hydrol. Res. 2018, 49, 744–760. [Google Scholar] [CrossRef]
- Chang, F.-J.; Tsai, M.-J. A nonlinear spatio-temporal lumping of radar rainfall for modeling multi-step-ahead inflow forecasts by data-driven techniques. J. Hydrol. 2016, 535, 256–269. [Google Scholar] [CrossRef]
- Bui, D.T.; Hoang, N.D.; Martínez-Álvarez, F.; Ngo, P.T.T.; Hoa, P.V.; Pham, T.D.; Costache, R. A novel deep learning neural network approach for predicting flash flood susceptibility: A case study at a high frequency tropical storm area. Sci. Total Environ. 2020, 701, 134413. [Google Scholar]
- Feng, Y.; Cui, N.; Hao, W.; Gao, L.; Gong, D. Estimation of soil temperature from meteorological data using different ma-chine learning models. Geoderma 2019, 338, 67–77. [Google Scholar] [CrossRef]
- Tayfur, G.; Singh, V.P. ANN and Fuzzy Logic Models for Simulating Event-Based Rainfall-Runoff. J. Hydraul. Eng. 2006, 132, 1321–1330. [Google Scholar] [CrossRef]
- Behzad, M.; Asghari, K.; Eazi, M.; Palhang, M. Generalization performance of support vector machines and neural networks in runoff modeling. Expert Syst. Appl. 2009, 36, 7624–7629. [Google Scholar] [CrossRef]
- Ghumman, A.R.; Ghazaw, Y.M.; Sohail, A.; Watanabe, K. Runoff forecasting by artificial neural network and conventional model. Alex. Eng. J. 2011, 50, 345–350. [Google Scholar] [CrossRef]
- Muñoz, P.; Orellana-Alvear, J.; Willems, P.; Célleri, R. Flash-Flood Forecasting in an Andean Mountain Catch-ment—Development of a Step-Wise Methodology Based on the Random Forest Algorithm. Water 2018, 10, 1519. [Google Scholar] [CrossRef]
- Venkatesan, E.; Mahindrakar, A.B. Forecasting floods using extreme gradient boosting-a new approach. Int. J. Civ. Eng. Tech. 2019, 10, 1336–1346. [Google Scholar]
- Bae, Y.; Kim, J.; Wang, W.; Yoo, Y.; Jung, J.; Kim, H.S. Monthly Inflow Forecasting of Soyang River Dam Using VARMA and Machine Learning Models. J. Clim. Res. 2019, 14, 183–198. [Google Scholar] [CrossRef]
- Assem, H.; Gharbia, S.S.; Makrai, G.; Johnston, P.; Gill, L.; Pilla, F. Urban Water Flow and Water Level Prediction Based on Deep Learning. In Joint European Conference on Machine Learning and Knowledge Discovery in Databases; Lecture Notes in Computer Science; Springer Nature: Skopje, Macedonia, 18–22 September 2017; pp. 317–329. [Google Scholar]
- Park, M.K.; Yoon, Y.S.; Lee, H.H.; Kim, J.H. Application of recurrent neural network for inflow prediction into multi-purpose dam basin. J. Korea Water Res. Assoc. 2018, 51, 1217–1227. [Google Scholar]
- Kratzert, F.; Klotz, D.; Brenner, C.; Schulz, K.; Herrnegger, M. Rainfall–runoff modelling using Long Short-Term Memory (LSTM) networks. Hydrol. Earth Syst. Sci. 2018, 22, 6005–6022. [Google Scholar] [CrossRef]
- Mok, J.Y.; Choi, J.H.; Moon, Y.I. Prediction of multipurpose dam inflow using deep learning. J. Korea Water Res. Assoc. 2020, 53, 97–105. [Google Scholar]
- Van, S.P.; Le, H.M.; Thanh, D.V.; Dang, T.D.; Loc, H.H.; Anh, D.T. Deep learning convolutional neural network in rain-fall-runoff modelling. J. Hydroinf. 2020, 22, 541–561. [Google Scholar] [CrossRef]
- Cho, K.; Van Merrienboer, B.; Bahdanau, D.; Bengio, Y. On the Properties of Neural Machine Translation: Encoder–Decoder Approaches. In Proceedings of the SSST-8, Eighth Workshop on Syntax, Semantics and Structure in Statistical Translation, Doha, Qatar, 25 October 2014. [Google Scholar]
- Sutskever, I.; Vinyals, O.; Le, Q.V. Sequence to sequence learning with neural networks. Adv. Neural Inf. Process. Syst. 2014, 2, 3104–3112. [Google Scholar]
- Johnson, L.E.; Hsu, C.; Zamora, R.; Cifelli, R. Assessment and Applications of Distributed Hydrologic Model-Russian-Napa River Basins, CA; NOAA Technical Memorandum PSD-316; NOAA Printing Office: Silver Spring, MD, USA, 2016.
- Han, H.; Kim, J.; Chandrasekar, V.; Choi, J.; Lim, S. Modeling Streamflow Enhanced by Precipitation from Atmospheric River Using the NOAA National Water Model: A Case Study of the Russian River Basin for February 2004. Atmosphere 2019, 10, 466. [Google Scholar] [CrossRef]
- Gholami, V.; Chau, K.W.; Fadaee, F.; Torkaman, J.; Ghaffari, A. Modeling of groundwater level fluctuations using dendro-chronology in alluvial aquifers. J. Hydrol. 2015, 529, 1060–1069. [Google Scholar] [CrossRef]
- Choi, C.; Kim, J.; Han, H.; Han, D.; Kim, H.S. Development of Water Level Prediction Models Using Machine Learning in Wetlands: A Case Study of Upo Wetland in South Korea. Water 2019, 12, 93. [Google Scholar] [CrossRef]
- Drucker, H.; Burges, C.J.; Kaufman, L.; Smola, A.J.; Vapnik, V. Support vector regression machines. In Advances in Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 1996. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models | Evaluation Metrics | |||
|---|---|---|---|---|
| R2 | RMSE (cms) | PRE (Absolute PRE) (%) | PTE (hr) | |
| SVM | 0.72 | 79.5 | −7.9 (17.4) | 7.0 |
| LSTM | 0.82 | 65.5 | −0.4 (11.7) | 2.7 |
| LSTM-s2s | 0.97 | 13.4 | 1.4 (3.1) | 1.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, H.; Choi, C.; Jung, J.; Kim, H.S. Deep Learning with Long Short Term Memory Based Sequence-to-Sequence Model for Rainfall-Runoff Simulation. Water 2021, 13, 437. https://doi.org/10.3390/w13040437
Han H, Choi C, Jung J, Kim HS. Deep Learning with Long Short Term Memory Based Sequence-to-Sequence Model for Rainfall-Runoff Simulation. Water. 2021; 13(4):437. https://doi.org/10.3390/w13040437
Chicago/Turabian StyleHan, Heechan, Changhyun Choi, Jaewon Jung, and Hung Soo Kim. 2021. "Deep Learning with Long Short Term Memory Based Sequence-to-Sequence Model for Rainfall-Runoff Simulation" Water 13, no. 4: 437. https://doi.org/10.3390/w13040437
APA StyleHan, H., Choi, C., Jung, J., & Kim, H. S. (2021). Deep Learning with Long Short Term Memory Based Sequence-to-Sequence Model for Rainfall-Runoff Simulation. Water, 13(4), 437. https://doi.org/10.3390/w13040437