
A Cloud-Based Framework for Large-Scale Monitoring of Ocean Plastics Using Multi-Spectral Satellite Imagery and Generative Adversarial Network



Abstract
:1. Introduction
2. Methods
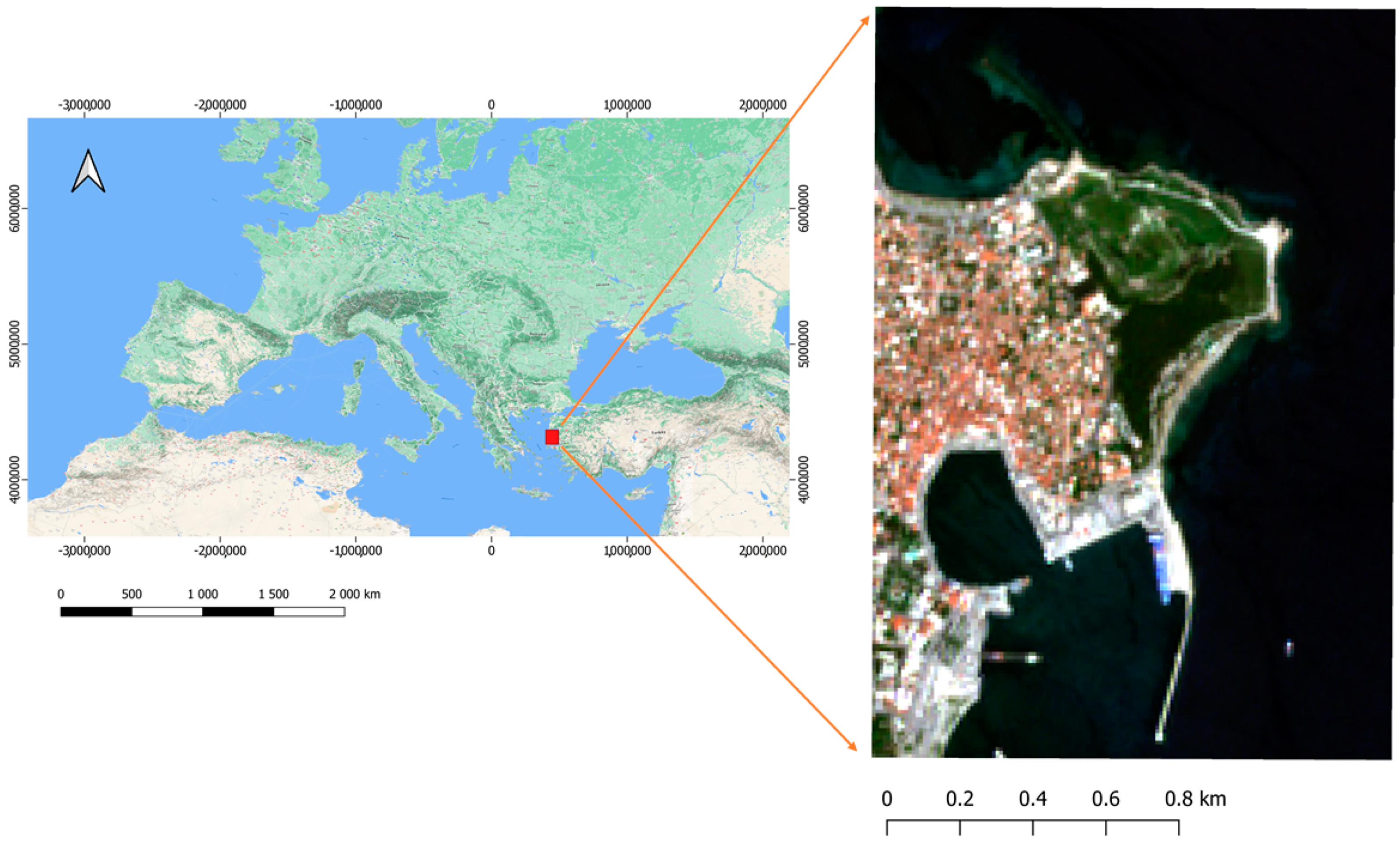
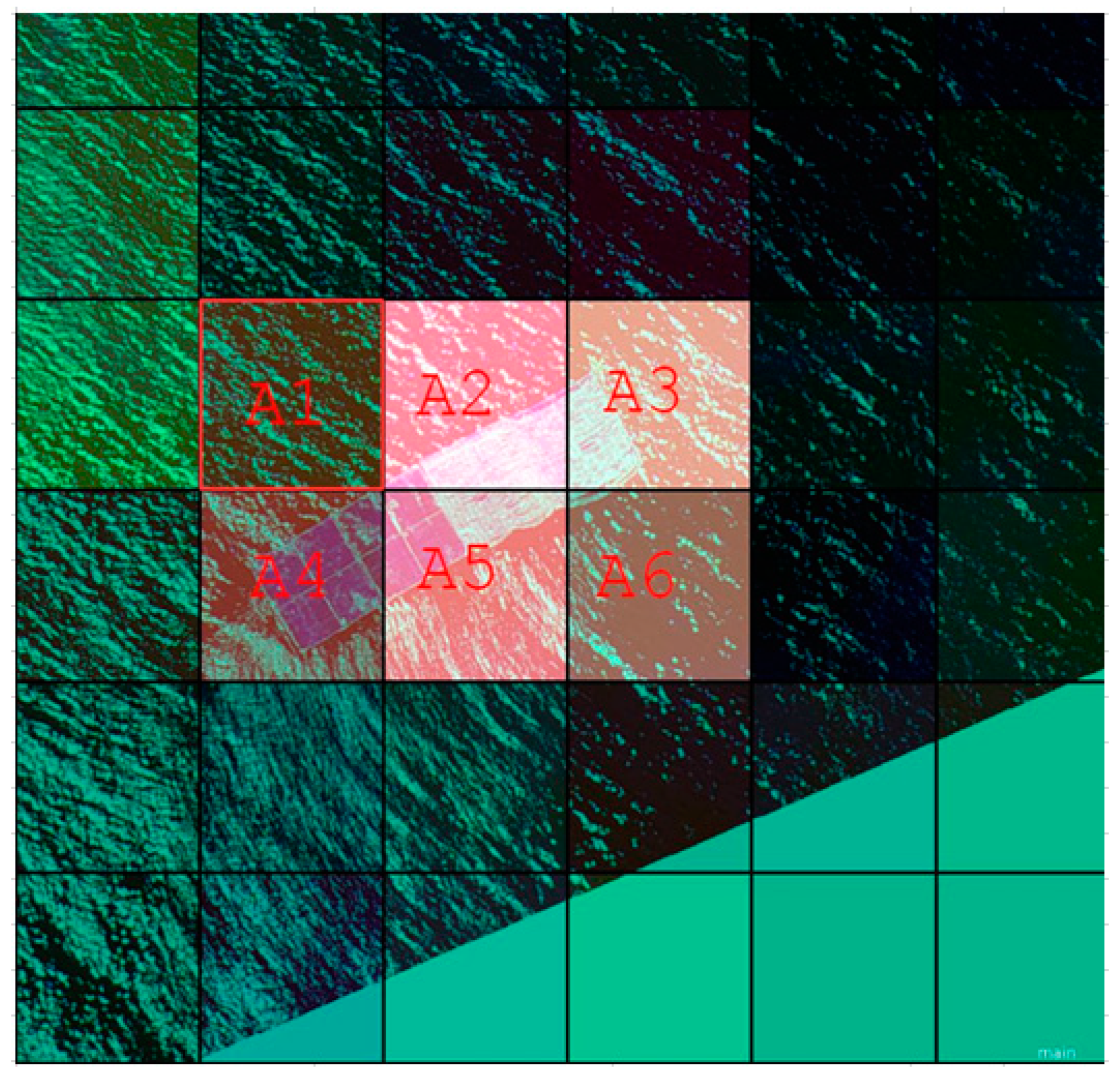
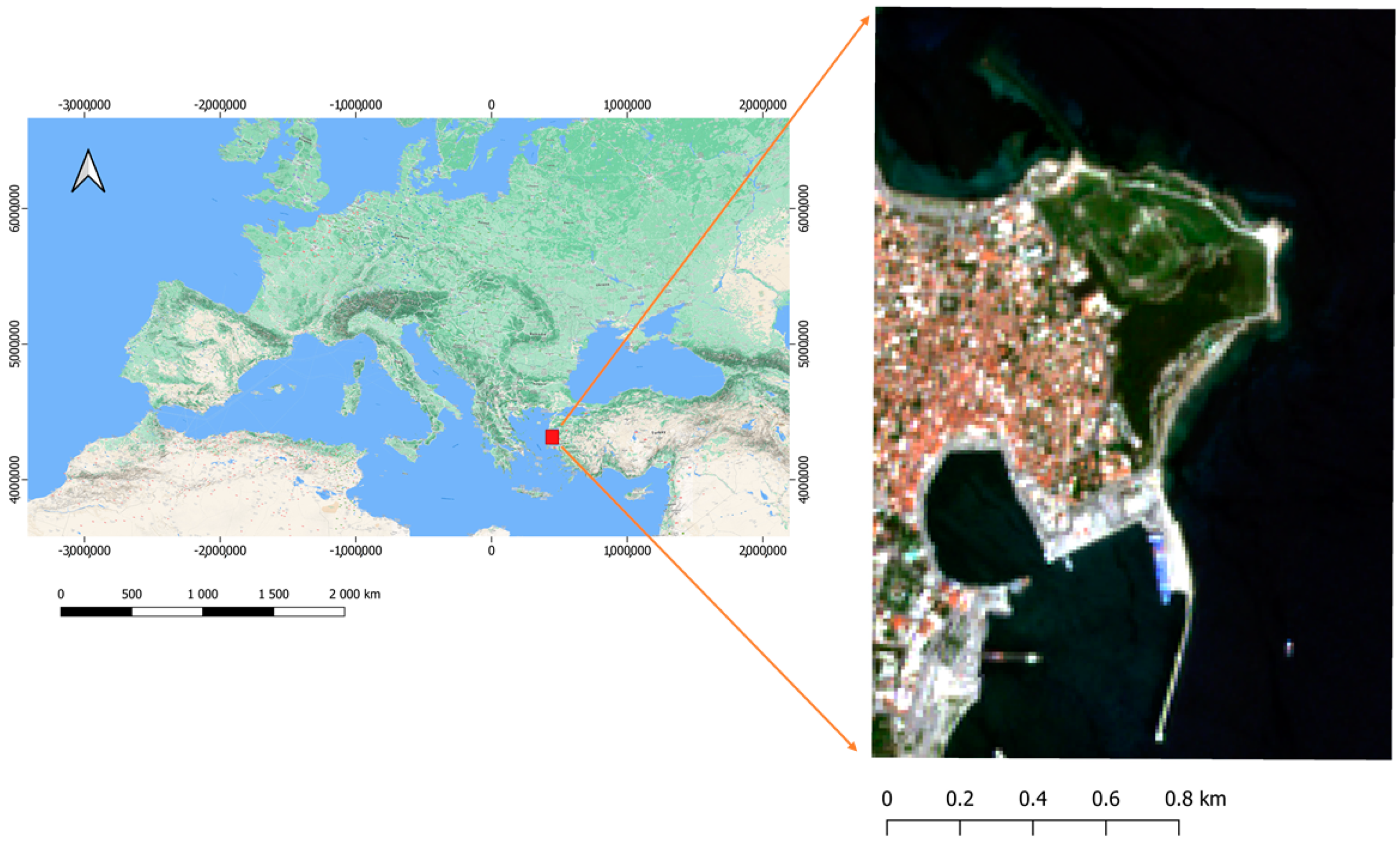
2.1. Study Area and Satellite Data
2.2. Methods
2.2.1. Sentinel Hub and Google Colaboratory
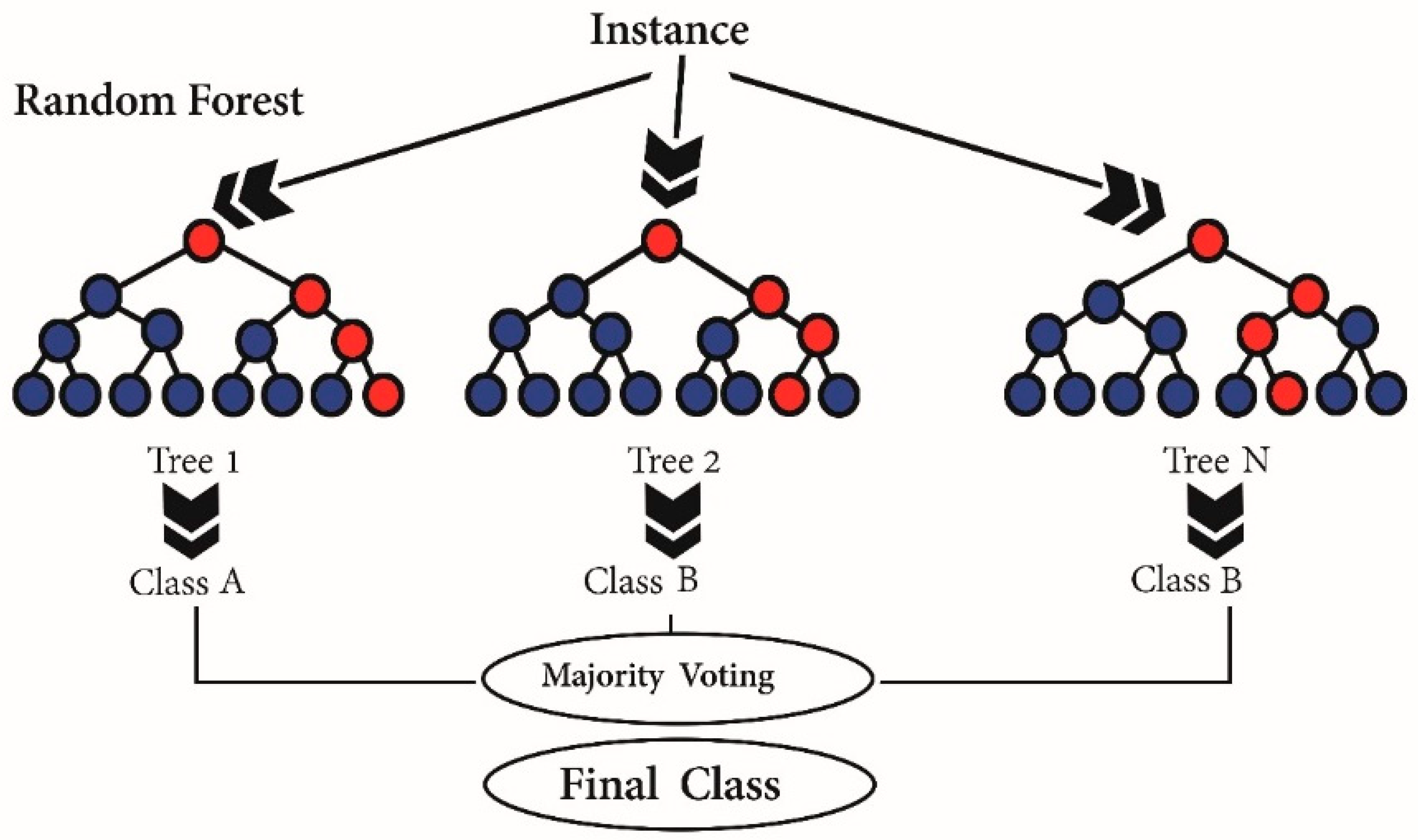
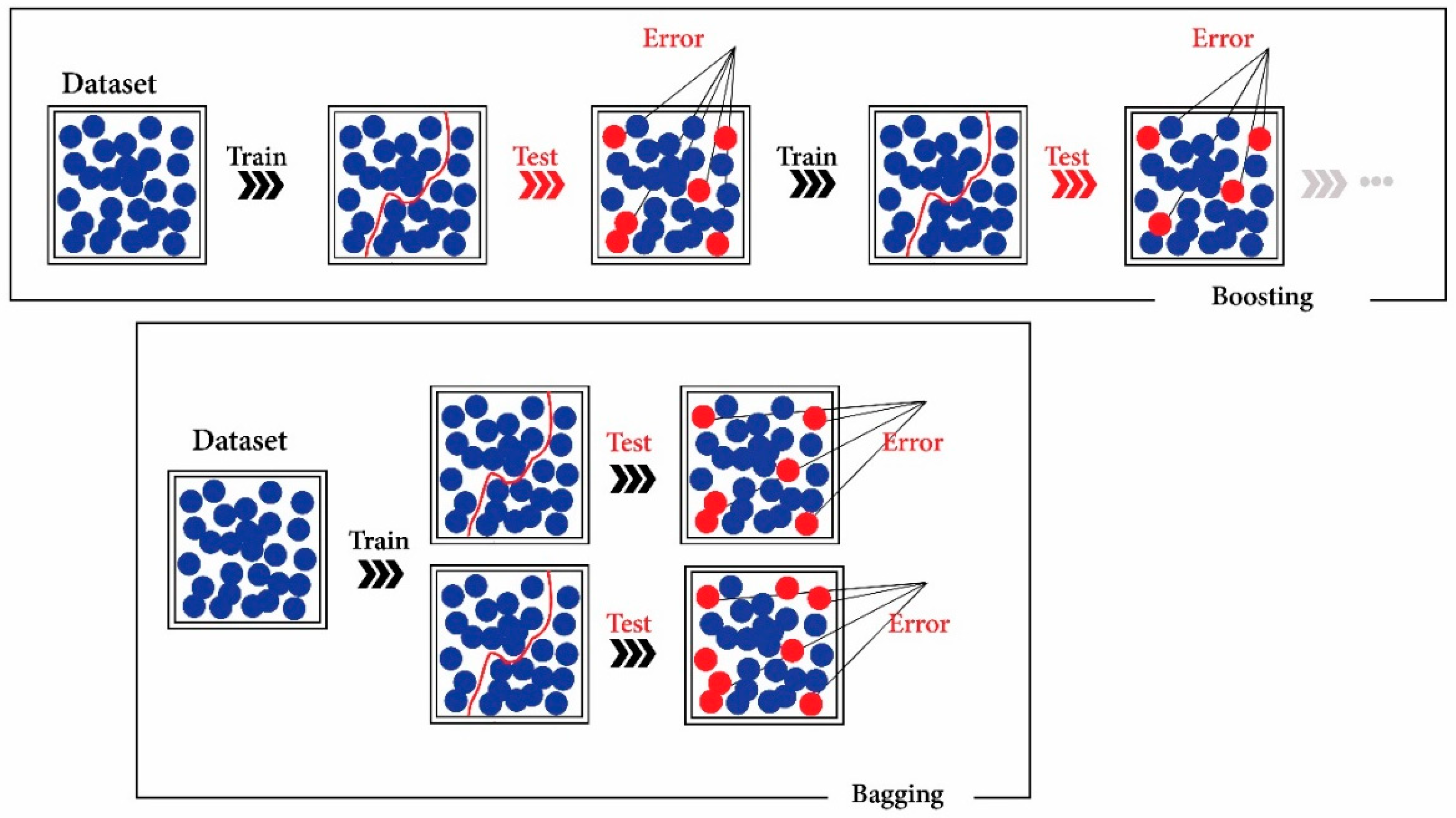
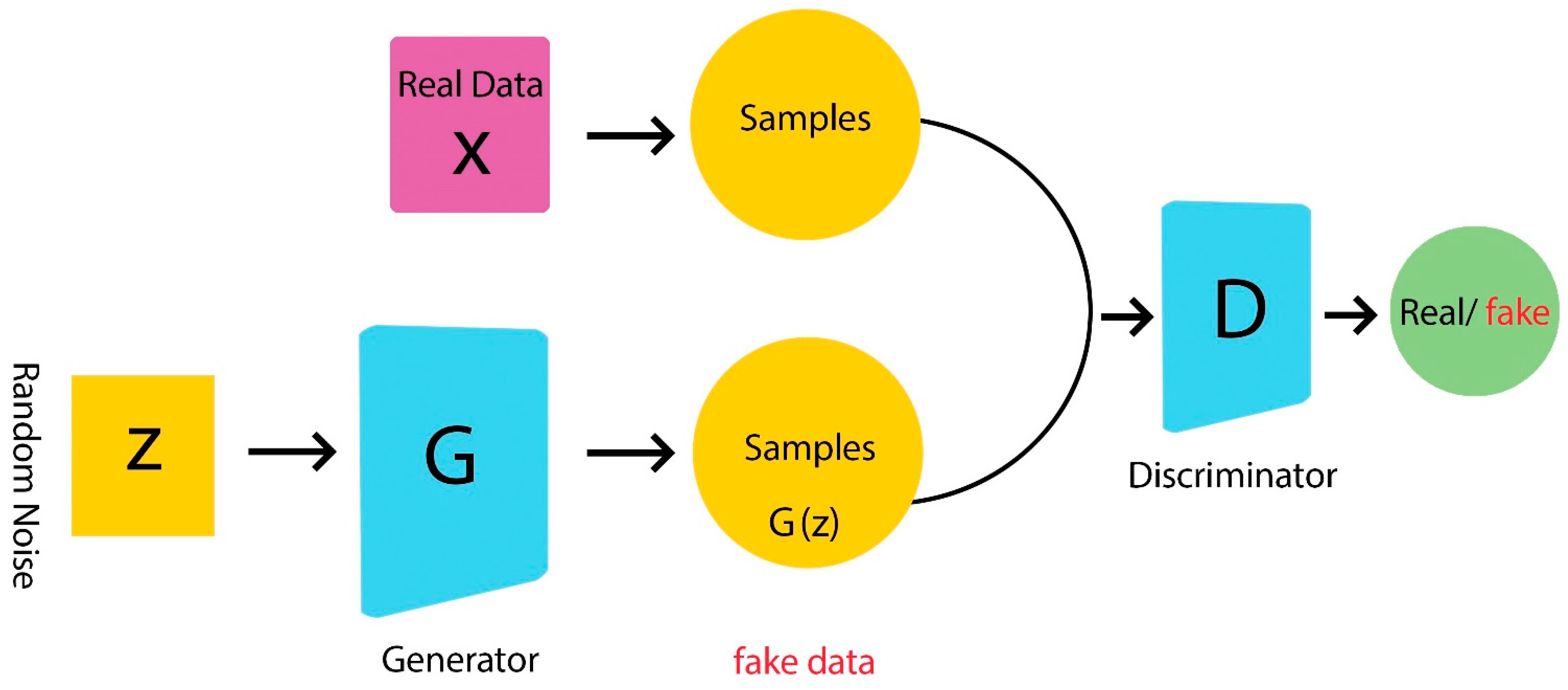
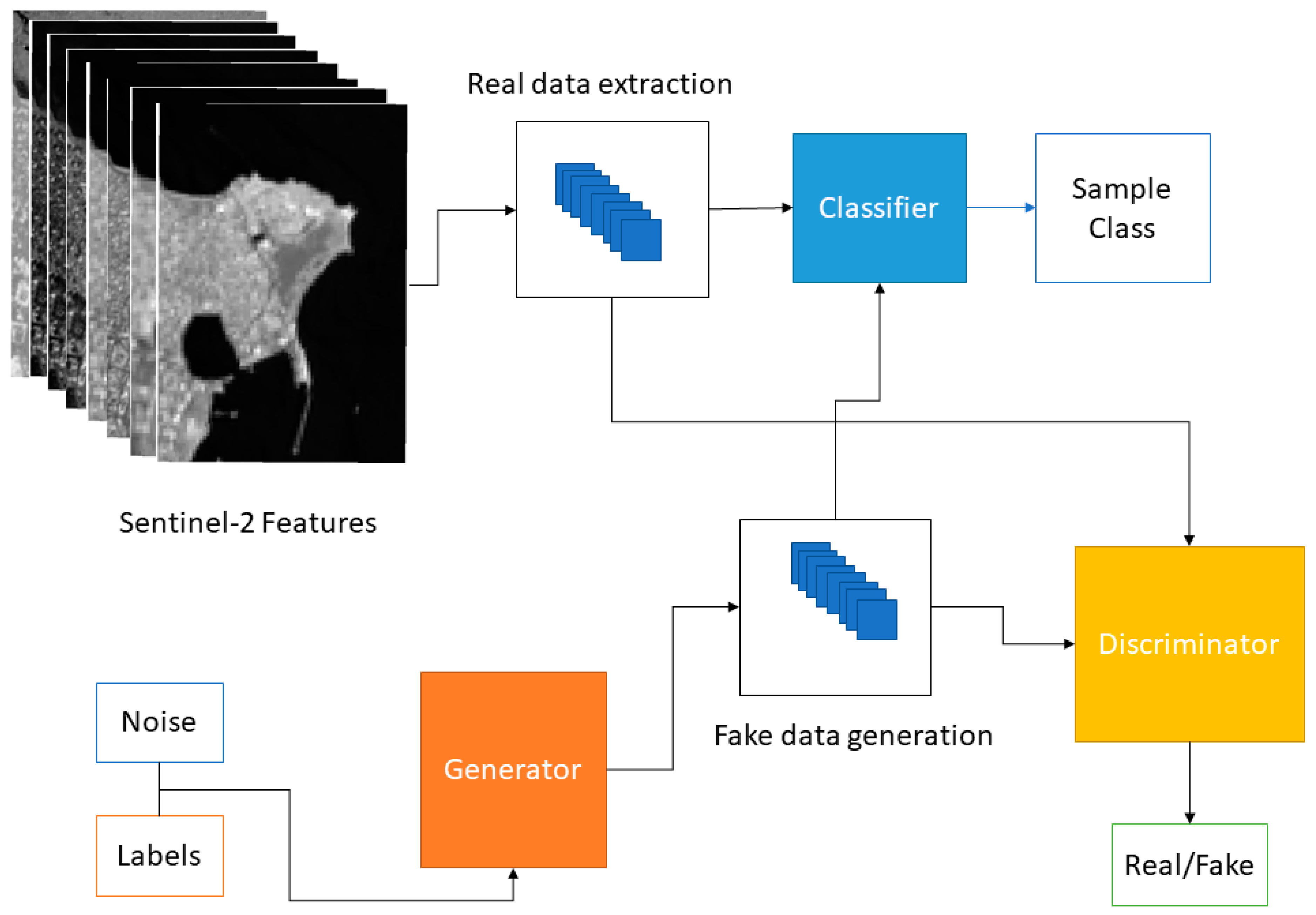
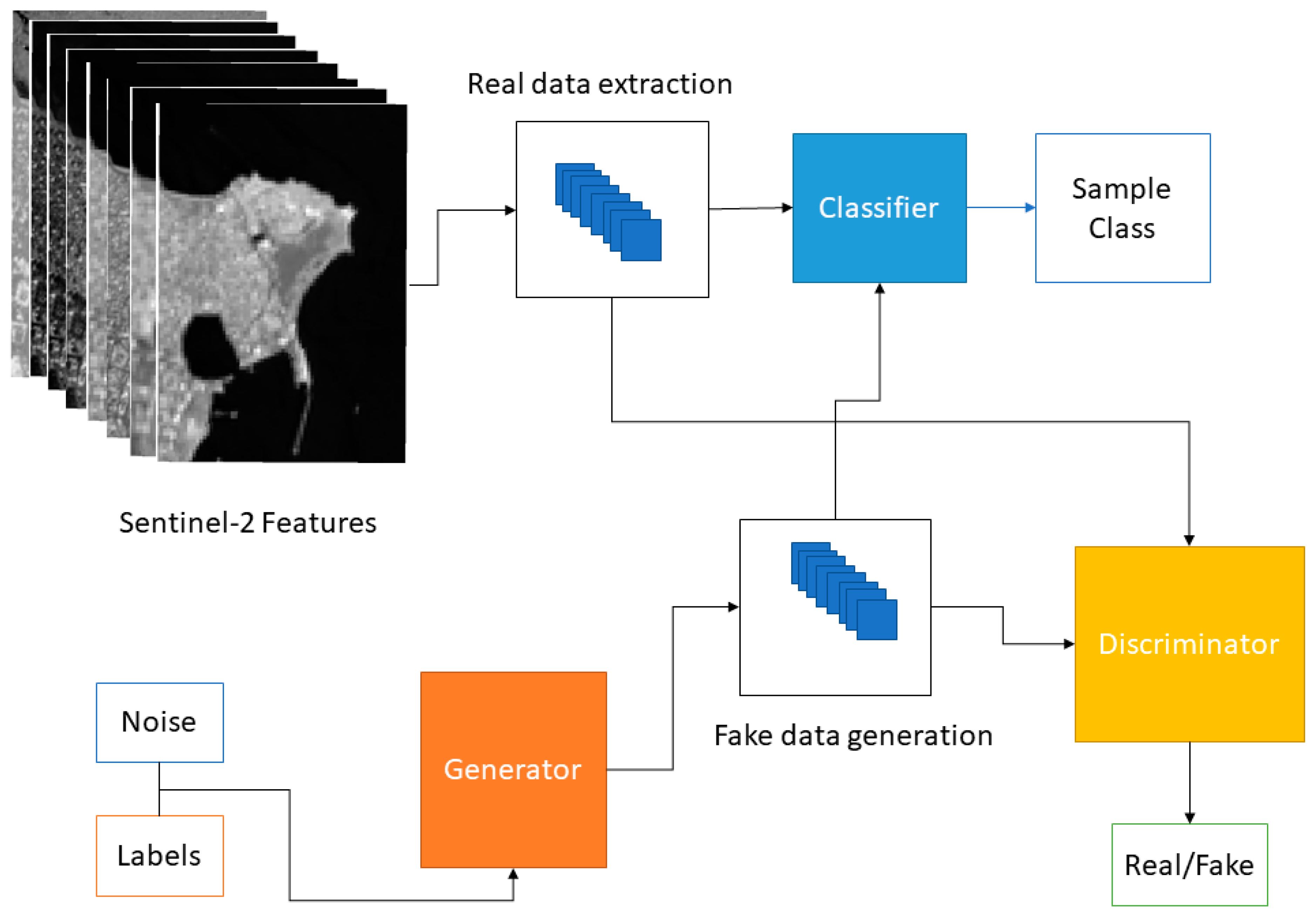
2.2.2. Algorithms
2.2.3. Features
2.2.4. Accuracy Assessment
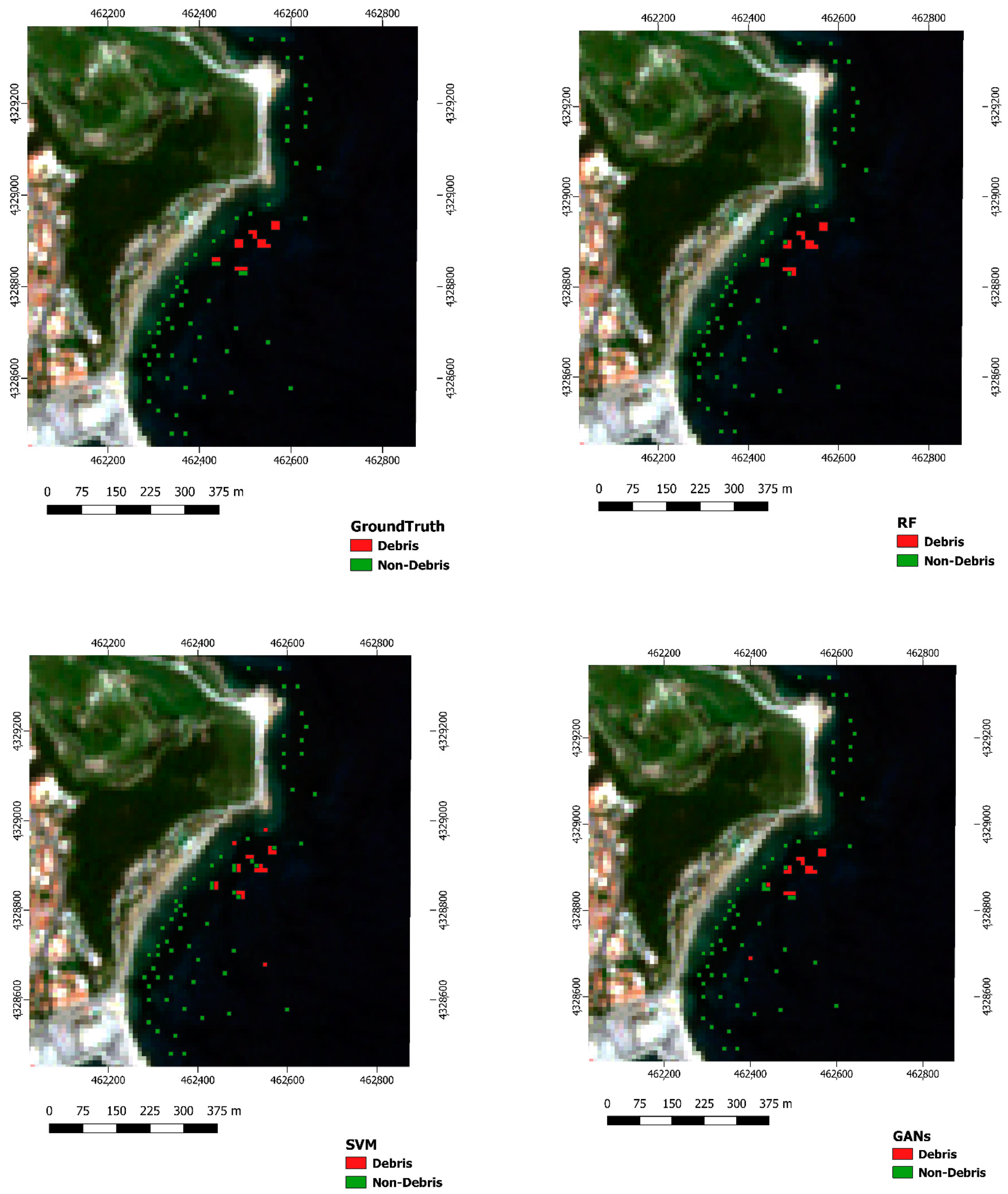
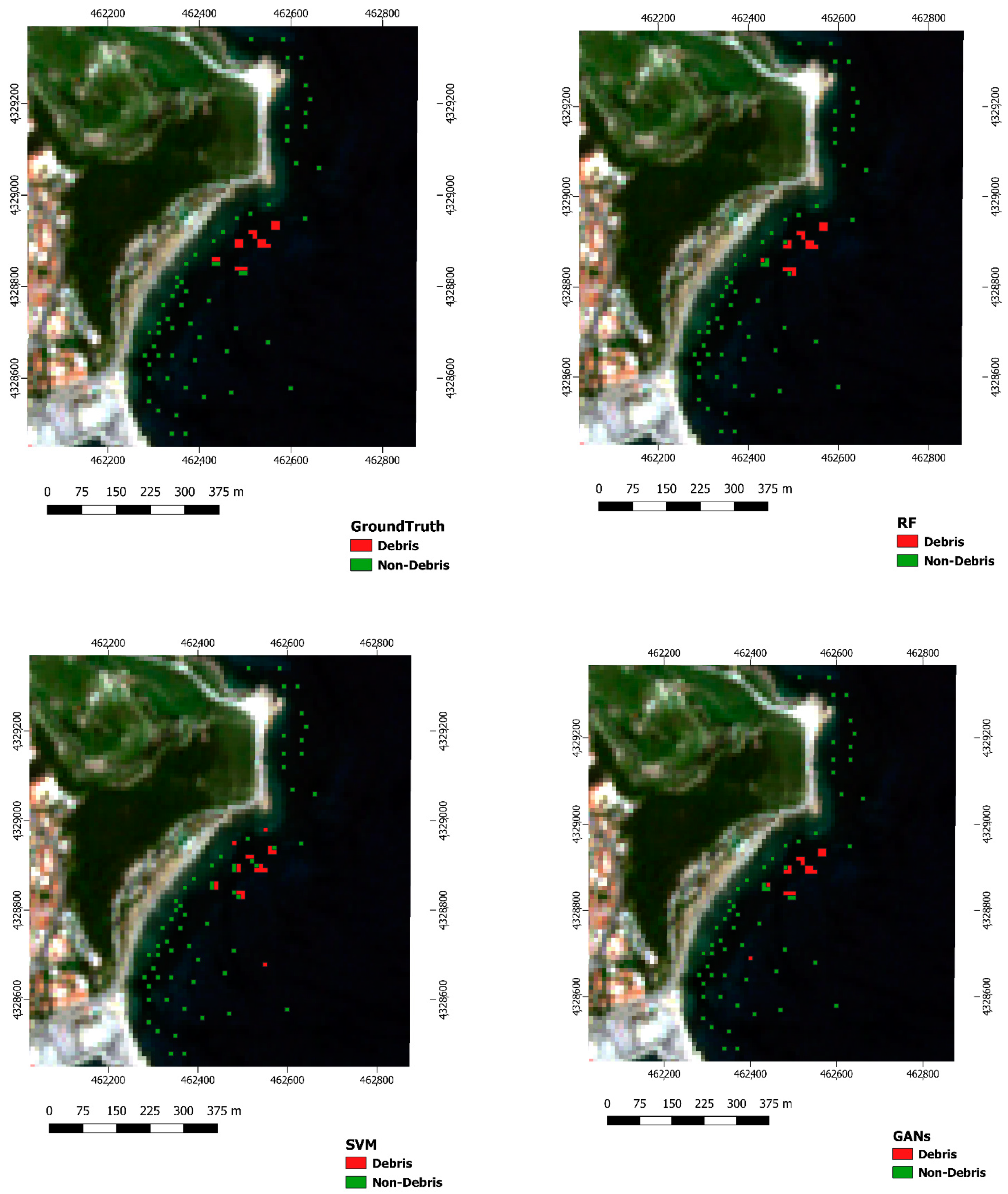
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Acuña-Ruz, T.; Uribe, D.; Taylor, R.; Amézquita, L.; Guzmán, M.C.; Merrill, J.; Martínez, P.; Voisin, L.; Mattar, C. Anthropogenic Marine Debris over Beaches: Spectral Characterization for Remote Sensing Applications. Remote Sens. Environ. 2018, 217, 309–322. [Google Scholar] [CrossRef]
- Thompson, R.C.; Moore, C.J.; vom Saal, F.S.; Swan, S.H. Plastics, the Environment and Human Health: Current Consensus and Future Trends. Philos. Trans. R. Soc. B: Biol. Sci. 2009, 364, 2153–2166. [Google Scholar] [CrossRef]
- Woodall, L.C.; Sanchez-Vidal, A.; Canals, M.; Paterson, G.L.J.; Coppock, R.; Sleight, V.; Calafat, A.; Rogers, A.D.; Narayanaswamy, B.E.; Thompson, R.C. The Deep Sea Is a Major Sink for Microplastic Debris. R. Soc. Open Sci. 2014, 1, 140317. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Goddijn-Murphy, L.; Peters, S.; van Sebille, E.; James, N.A.; Gibb, S. Concept for a Hyperspectral Remote Sensing Algorithm for Floating Marine Macro Plastics. Mar. Pollut. Bull. 2018, 126, 255–262. [Google Scholar] [CrossRef] [Green Version]
- Cózar, A.; Echevarría, F.; González-Gordillo, J.I.; Irigoien, X.; Úbeda, B.; Hernández-León, S.; Palma, Á.T.; Navarro, S.; García-de-Lomas, J.; Ruiz, A.; et al. Plastic Debris in the Open Ocean. Proc. Natl. Acad. Sci. USA 2014, 111, 10239. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ostle, C.; Thompson, R.C.; Broughton, D.; Gregory, L.; Wootton, M.; Johns, D.G. The Rise in Ocean Plastics Evidenced from a 60-Year Time Series. Nat. Commun. 2019, 10, 1622. [Google Scholar] [CrossRef] [PubMed]
- UNEP (United Nations Environment Programme). Marine Litter: A Global Challenge 2009. Available online: file:///C:/Users/MDPI/AppData/Local/Temp/151908.pdf (accessed on 17 September 2021).
- Derraik, J.G.B. The Pollution of the Marine Environment by Plastic Debris: A Review. Mar. Pollut. Bull. 2002, 44, 842–852. [Google Scholar] [CrossRef]
- Pham, C.K.; Ramirez-Llodra, E.; Alt, C.H.S.; Amaro, T.; Bergmann, M.; Canals, M.; Company, J.B.; Davies, J.; Duineveld, G.; Galgani, F.; et al. Marine Litter Distribution and Density in European Seas, from the Shelves to Deep Basins. PLOS ONE 2014, 9, e95839. [Google Scholar] [CrossRef] [Green Version]
- Europe, P. Plastics—The Facts 2016. In An Analysis of European Plastics Production, Demand and Waste Data; Plastics Europe: Brussels, Belgium, 2016. [Google Scholar]
- Pichel, W.G.; Veenstra, T.S.; Churnside, J.H.; Arabini, E.; Friedman, K.S.; Foley, D.G.; Brainard, R.E.; Kiefer, D.; Ogle, S.; Clemente-Colón, P.; et al. GhostNet Marine Debris Survey in the Gulf of Alaska – Satellite Guidance and Aircraft Observations. Mar. Pollut. Bull. 2012, 65, 28–41. [Google Scholar] [CrossRef]
- Barnes, D.K.A.; Walters, A.; Gonçalves, L. Macroplastics at Sea around Antarctica. Mar. Environ. Res. 2010, 70, 250–252. [Google Scholar] [CrossRef] [PubMed]
- Morishige, C.; Donohue, M.J.; Flint, E.; Swenson, C.; Woolaway, C. Factors Affecting Marine Debris Deposition at French Frigate Shoals, Northwestern Hawaiian Islands Marine National Monument, 1990–2006. Mar. Pollut. Bull. 2007, 54, 1162–1169. [Google Scholar] [CrossRef] [PubMed]
- Gall, S.C.; Thompson, R.C. The Impact of Debris on Marine Life. Mar. Pollut. Bull. 2015, 92, 170–179. [Google Scholar] [CrossRef] [PubMed]
- Hardesty, B.D.; Good, T.P.; Wilcox, C. Novel Methods, New Results and Science-Based Solutions to Tackle Marine Debris Impacts on Wildlife. Ocean. Coast. Manag. 2015, 115, 4–9. [Google Scholar] [CrossRef] [Green Version]
- Newman, S.; Watkins, E.; Farmer, A.; Ten Brink, P.; Schweitzer, J.-P. The Economics of Marine Litter. In Marine Anthropogenic Litter; Bergmann, M., Gutow, L., Klages, M., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 367–394. ISBN 978-3-319-16510-3. [Google Scholar]
- Law, K.L. Plastics in the Marine Environment. Annu. Rev. Mar. Sci. 2017, 9, 205–229. [Google Scholar] [CrossRef] [Green Version]
- Nelms, S.; Coombes, C.; Foster, L.; Galloway, T.; Godley, B.; Lindeque, P.; Witt, M. Marine Anthropogenic Litter on British Beaches: A 10-Year Nationwide Assessment Using Citizen Science Data. Sci. Total. Environ. 2017, 579, 1399–1409. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chubarenko, I.; Stepanova, N. Microplastics in Sea Coastal Zone: Lessons Learned from the Baltic Amber. Environ. Pollut. 2017, 224, 243–254. [Google Scholar] [CrossRef] [PubMed]
- Romera-Castillo, C.; Pinto, M.; Langer, T.M.; Álvarez-Salgado, X.A.; Herndl, G.J. Dissolved Organic Carbon Leaching from Plastics Stimulates Microbial Activity in the Ocean. Nat. Commun. 2018, 9, 1430. [Google Scholar] [CrossRef]
- Watters, D.L.; Yoklavich, M.M.; Love, M.S.; Schroeder, D.M. Assessing Marine Debris in Deep Seafloor Habitats off California. Mar. Pollut. Bull. 2010, 60, 131–138. [Google Scholar] [CrossRef]
- Mace, T.H. At-Sea Detection of Marine Debris: Overview of Technologies, Processes, Issues, and Options. Mar. Pollut. Bull. 2012, 65, 23–27. [Google Scholar] [CrossRef]
- Opfer, S.; Arthur, C.; Lippiatt, S. NOAA Marine Debris Shoreline Survey Field Guide; NOAA Marine Debris Program: Silver Spring, MD, USA, 2012; p. 14. [Google Scholar]
- Kataoka, T.; Hinata, H.; Kato, S. Analysis of a Beach as a Time-Invariant Linear Input/Output System of Marine Litter. Mar. Pollut. Bull. 2013, 77, 266–273. [Google Scholar] [CrossRef]
- Kataoka, T.; Hinata, H.; Kato, S. Backwash Process of Marine Macroplastics from a Beach by Nearshore Currents around a Submerged Breakwater. Mar. Pollut. Bull. 2015, 101, 539–548. [Google Scholar] [CrossRef] [PubMed]
- Kako, S.; Isobe, A.; Kataoka, T.; Yufu, K.; Sugizono, S.; Plybon, C.; Murphy, T.A. Sequential Webcam Monitoring and Modeling of Marine Debris Abundance. Mar. Pollut. Bull. 2018, 132, 33–43. [Google Scholar] [CrossRef] [PubMed]
- Ge, Z.; Shi, H.; Mei, X.; Dai, Z.; Li, D. Semi-Automatic Recognition of Marine Debris on Beaches. Sci. Rep. 2016, 6, 25759. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Veenstra, T.S.; Churnside, J.H. Airborne Sensors for Detecting Large Marine Debris at Sea. Mar. Pollut. Bull. 2012, 65, 63–68. [Google Scholar] [CrossRef]
- Kataoka, T.; Murray, C.C.; Isobe, A. Quantification of Marine Macro-Debris Abundance around Vancouver Island, Canada, Based on Archived Aerial Photographs Processed by Projective Transformation. Mar. Pollut. Bull. 2018, 132, 44–51. [Google Scholar] [CrossRef]
- Fallati, L.; Polidori, A.; Salvatore, C.; Saponari, L.; Savini, A.; Galli, P. Anthropogenic Marine Debris Assessment with Unmanned Aerial Vehicle Imagery and Deep Learning: A Case Study along the Beaches of the Republic of Maldives. Sci. Total. Environ. 2019, 693, 133581. [Google Scholar] [CrossRef] [PubMed]
- Garcia-Garin, O.; Monleón-Getino, T.; López-Brosa, P.; Borrell, A.; Aguilar, A.; Borja-Robalino, R.; Cardona, L.; Vighi, M. Automatic Detection and Quantification of Floating Marine Macro-Litter in Aerial Images: Introducing a Novel Deep Learning Approach Connected to a Web Application in R. Environ. Pollut. 2021, 273, 116490. [Google Scholar] [CrossRef]
- Lebreton, L.; Egger, M.; Slat, B. A Global Mass Budget for Positively Buoyant Macroplastic Debris in the Ocean. Sci. Rep. 2019, 9, 12922. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- LI, W.C.; TSE, H.F.; FOK, L. Plastic Waste in the Marine Environment: A Review of Sources, Occurrence and Effects. Sci. Total. Environ. 2016, 566–567, 333–349. [Google Scholar] [CrossRef]
- Carlson, D.F.; Özgökmen, T.; Novelli, G.; Guigand, C.; Chang, H.; Fox-Kemper, B.; Mensa, J.; Mehta, S.; Fredj, E.; Huntley, H.; et al. Surface Ocean Dispersion Observations From the Ship-Tethered Aerostat Remote Sensing System. Front. Mar. Sci. 2018, 5, 479. [Google Scholar] [CrossRef]
- Hu, C. Remote Detection of Marine Debris Using Satellite Observations in the Visible and near Infrared Spectral Range: Challenges and Potentials. Remote Sens. Environ. 2021, 259, 112414. [Google Scholar] [CrossRef]
- Kikaki, A.; Karantzalos, K.; Power, C.A.; Raitsos, D.E. Remotely Sensing the Source and Transport of Marine Plastic Debris in Bay Islands of Honduras (Caribbean Sea). Remote Sens. 2020, 12, 1727. [Google Scholar] [CrossRef]
- Kremezi, M.; Kristollari, V.; Karathanassi, V.; Topouzelis, K.; Kolokoussis, P.; Taggio, N.; Aiello, A.; Ceriola, G.; Barbone, E.; Corradi, P. Pansharpening PRISMA Data for Marine Plastic Litter Detection Using Plastic Indexes. IEEE Access 2021, 9, 61955–61971. [Google Scholar] [CrossRef]
- Balsi, M.; Esposito, S.; Moroni, M. Moroni Hyperspectral Characterization of Marine Plastic Litters. In Proceedings of the 2018 IEEE International Workshop on Metrology for the Sea; Learning to Measure Sea Health Parameters (MetroSea), Bari, Italy, 8–10 October 2018; pp. 28–32. [Google Scholar]
- Biermann, L.; Clewley, D.; Martinez-Vicente, V.; Topouzelis, K. Finding Plastic Patches in Coastal Waters Using Optical Satellite Data. Sci. Rep. 2020, 10, 5364. [Google Scholar] [CrossRef] [Green Version]
- Themistocleous, K.; Papoutsa, C.; Michaelides, S.; Hadjimitsis, D. Investigating Detection of Floating Plastic Litter from Space Using Sentinel-2 Imagery. Remote Sens. 2020, 12, 2648. [Google Scholar] [CrossRef]
- Topouzelis, K.; Papageorgiou, D.; Karagaitanakis, A.; Papakonstantinou, A.; Ballesteros, M.A. Ballesteros Plastic Litter Project 2019: Exploring the Detection of Floating Plastic Litter Using Drones and Sentinel 2 Satellite Images. In Proceedings of the IGARSS 2020-2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 Septemper–2 October 2020; pp. 6329–6332. [Google Scholar]
- Topouzelis, K.; Papageorgiou, D.; Karagaitanakis, A.; Papakonstantinou, A.; Arias Ballesteros, M. Remote Sensing of Sea Surface Artificial Floating Plastic Targets with Sentinel-2 and Unmanned Aerial Systems (Plastic Litter Project 2019). Remote Sens. 2020, 12, 2013. [Google Scholar] [CrossRef]
- Angelidis, M.O.; Aloupi, M. Geochemical Study of Coastal Sediments Influenced by River-Transported Pollution: Southern Evoikos Gulf, Greece. Mar. Pollut. Bull. 2000, 40, 77–82. [Google Scholar] [CrossRef]
- Stefatos, A.; Charalampakis, M.; Papatheodorou, G.; Ferentinos, G. Marine Debris on the Seafloor of the Mediterranean Sea: Examples from Two Enclosed Gulfs in Western Greece. Mar. Pollut. Bull. 1999, 38, 389–393. [Google Scholar] [CrossRef]
- Kapsalis, K.; Kavvalou, M.; Damikouka, I.; Cavoura, O. Investigation of Petroleum Hydrocarbon Pollution along the Coastline of South Attica, Greece, after the Sinking of the Agia Zoni ΙΙ Oil Tanker. SN Appl. Sci. 2021, 3, 48. [Google Scholar] [CrossRef]
- Charitou, A.; Naasan Aga-Spyridopoulou, R.; Mylona, Z.; Beck, R.; McLellan, F.; Addamo, A.M. Investigating the Knowledge and Attitude of the Greek Public towards Marine Plastic Pollution and the EU Single-Use Plastics Directive. Mar. Pollut. Bull. 2021, 166, 112182. [Google Scholar] [CrossRef]
- Topouzelis, K. PLP2019 Dataset. 2020. Available online: https://zenodo.org/record/3752719#.YURAO7gzZPZ (accessed on 14 September 2021).
- Breiman, L. Random Forests. Mach. Learn. 2001, 54, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Jamali, A.; Mahdianpari, M.; Brisco, B.; Granger, J.; Mohammadimanesh, F.; Salehi, B. Comparing Solo Versus Ensemble Convolutional Neural Networks for Wetland Classification Using Multi-Spectral Satellite Imagery. Remote Sens. 2021, 13, 2046. [Google Scholar] [CrossRef]
- DeLancey, E.R.; Kariyeva, J.; Cranston, J.; Brisco, B. Monitoring Hydro Temporal Variability in Alberta, Canada with Multi-Temporal Sentinel-1 SAR Data. Can. J. Remote Sens. 2018, 44, 1–10. [Google Scholar] [CrossRef]
- Mahdianpari, M.; Salehi, B.; Mohammadimanesh, F.; Motagh, M. Random Forest Wetland Classification Using ALOS-2 L-Band, RADARSAT-2 C-Band, and TerraSAR-X Imagery. ISPRS J. Photogramm. Remote Sens. 2017, 130, 13–31. [Google Scholar] [CrossRef]
- Sheykhmousa, M.; Mahdianpari, M.; Ghanbari, H.; Mohammadimanesh, F.; Ghamisi, P.; Homayouni, S. Support Vector Machine vs. Random Forest for Remote Sensing Image Classification: A Meta-Analysis and Systematic Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 6308–6325. [Google Scholar] [CrossRef]
- DeLancey, E.R.; Simms, J.F.; Mahdianpari, M.; Brisco, B.; Mahoney, C.; Kariyeva, J. Comparing Deep Learning and Shallow Learning for Large-Scale Wetland Classification in Alberta, Canada. Remote Sens. 2019, 12, 2. [Google Scholar] [CrossRef] [Green Version]
- Izquierdo-Verdiguier, E.; Zurita-Milla, R. An Evaluation of Guided Regularized Random Forest for Classification and Regression Tasks in Remote Sensing. Int. J. Appl. Earth Obs. Geoinf. 2020, 88, 102051. [Google Scholar] [CrossRef]
- Quinlan, J.R. C4.5: Programs Mach. Learn; Morgan Kaufmann: San Mateo, CA, USA, 1993. [Google Scholar]
- Leo, B.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees; Chapman and Hall/CRC: Boca Raton, FL, USA, 1984. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Foody, G.M.; Mathur, A. Toward Intelligent Training of Supervised Image Classifications: Directing Training Data Acquisition for SVM Classification. Remote Sens. Environ 2004, 93, 107–117. [Google Scholar] [CrossRef]
- Jamali, A.; Mahdianpari, M.; Brisco, B.; Granger, J.; Mohammadimanesh, F.; Salehi, B. Wetland Mapping Using Multi-Spectral Satellite Imagery and Deep Convolutional Neural Networks: A Case Study in Newfoundland and Labrador, Canada. Can. J. Remote Sens. 2021, 1–18. [Google Scholar] [CrossRef]
- Jamali, A. Improving Land Use Land Cover Mapping of a Neural Network with Three Optimizers of Multi-Verse Optimizer, Genetic Algorithm, and Derivative-Free Function. Egypt. J. Remote Sens. Space Sci. 2020. [Google Scholar] [CrossRef]
- Zhang, C.; Pan, X.; Li, H.; Gardiner, A.; Sargent, I.; Hare, J.; Atkinson, P.M. A Hybrid MLP-CNN Classifier for Very Fine Resolution Remotely Sensed Image Classification. ISPRS J. Photogramm. Remote Sens. 2018, 140, 133–144. [Google Scholar] [CrossRef] [Green Version]
- Mahdianpari, M.; Salehi, B.; Rezaee, M.; Mohammadimanesh, F.; Zhang, Y. Very Deep Convolutional Neural Networks for Complex Land Cover Mapping Using Multispectral Remote Sensing Imagery. Remote Sens. 2018, 10, 1119. [Google Scholar] [CrossRef] [Green Version]
- Rezaee, M.; Mahdianpari, M.; Zhang, Y.; Salehi, B. Deep Convolutional Neural Network for Complex Wetland Classification Using Optical Remote Sensing Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3030–3039. [Google Scholar] [CrossRef]
- Mohammadimanesh, F.; Salehi, B.; Mahdianpari, M.; Gill, E.; Molinier, M. A New Fully Convolutional Neural Network for Semantic Segmentation of Polarimetric SAR Imagery in Complex Land Cover Ecosystem. ISPRS J. Photogramm. Remote Sens. 2019, 151, 223–236. [Google Scholar] [CrossRef]
- Jamali, A. Land Use Land Cover Mapping Using Advanced Machine Learning Classifiers: A Case Study of Shiraz City, Iran. Earth Sci. Inform. 2020, 13, 1015–1030. [Google Scholar] [CrossRef]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative Adversarial Nets. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 8–13 December 2014; Volume 27, pp. 2672–2680. [Google Scholar]
- Roy, S.K.; Haut, J.M.; Paoletti, M.E.; Dubey, S.R.; Plaza, A. Generative Adversarial Minority Oversampling for Spectral-Spatial Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2021, 1–15. [Google Scholar] [CrossRef]
- Audebert, N.; Le Saux, B.; Lefèvre, S. Lefevre Generative Adversarial Networks for Realistic Synthesis of Hyperspectral Samples. In Proceedings of the IGARSS 2018-2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 4359–4362. [Google Scholar]
- Zhu, L.; Chen, Y.; Ghamisi, P.; Benediktsson, J.A. Generative Adversarial Networks for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5046–5063. [Google Scholar] [CrossRef]
- Xu, J.; Li, Z.; Du, B.; Zhang, M.; Liu, J. Reluplex Made More Practical: Leaky ReLU. In Proceedings of the 2020 IEEE Symposium on Computers and Communications (ISCC), Rennes, France, 7–10 July 2020; pp. 1–7. [Google Scholar]
- Basu, B.; Sannigrahi, S.; Sarkar Basu, A.; Pilla, F. Development of Novel Classification Algorithms for Detection of Floating Plastic Debris in Coastal Waterbodies Using Multispectral Sentinel-2 Remote Sensing Imagery. Remote Sens. 2021, 13, 1598. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | Date of Acquisition |
|---|---|
| S2B_MSIL1C_20190418T085559_N0207_R007_T35SMD_20190418T110441 | 18 April 2019 |
| S2A_MSIL1C_20190503T085601_N0207_R007_T35SMD_20190503T103221 | 3 May 2019 |
| S2B_MSIL1C_20190518T085609_N0207_R007_T35SMD_20190518T113032 | 18 May 2019 |
| S2B_MSIL1C_20190528T085609_N0207_R007_T35SMD_20190528T115440 | 28 May 2019 |
| S2B_MSIL1C_20190607T085609_N0207_R007_T35SMD_20190607T110335 | 7 June 2019 |
| Algorithm | Training (Debris/Non-Debris) | Test (Debris/Non-Debris) |
|---|---|---|
| RF | 15/41 | 6/19 |
| SVM | 15/41 | 6/19 |
| GANs | 29/86 | 6/19 |
| Algorithm | Plastic | Non-Plastic | OA (%) | F1-Score (%) | Precision | Recall | |
|---|---|---|---|---|---|---|---|
| RF | Plastic | 4 | 2 | 88 | 0.73 | 0.67 | 0.80 |
| Non-plastic | 1 | 18 | 0.92 | 0.95 | 0.90 | ||
| SVM | Plastic | 5 | 1 | 84 | 0.71 | 0.83 | 0.62 |
| Non-plastic | 3 | 16 | 0.89 | 0.84 | 0.94 | ||
| GAN-RF | Plastic | 5 | 1 | 96 | 1 | 0.83 | 0.91 |
| Non-plastic | 0 | 19 | 0.95 | 1 | 0.97 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jamali, A.; Mahdianpari, M. A Cloud-Based Framework for Large-Scale Monitoring of Ocean Plastics Using Multi-Spectral Satellite Imagery and Generative Adversarial Network. Water 2021, 13, 2553. https://doi.org/10.3390/w13182553
Jamali A, Mahdianpari M. A Cloud-Based Framework for Large-Scale Monitoring of Ocean Plastics Using Multi-Spectral Satellite Imagery and Generative Adversarial Network. Water. 2021; 13(18):2553. https://doi.org/10.3390/w13182553
Chicago/Turabian StyleJamali, Ali, and Masoud Mahdianpari. 2021. "A Cloud-Based Framework for Large-Scale Monitoring of Ocean Plastics Using Multi-Spectral Satellite Imagery and Generative Adversarial Network" Water 13, no. 18: 2553. https://doi.org/10.3390/w13182553
APA StyleJamali, A., & Mahdianpari, M. (2021). A Cloud-Based Framework for Large-Scale Monitoring of Ocean Plastics Using Multi-Spectral Satellite Imagery and Generative Adversarial Network. Water, 13(18), 2553. https://doi.org/10.3390/w13182553