Drag Force Modeling of Surface Wave Dissipation by a Vegetation Field


Abstract
1. Introduction
2. Numerical Model
2.1. Model Equations
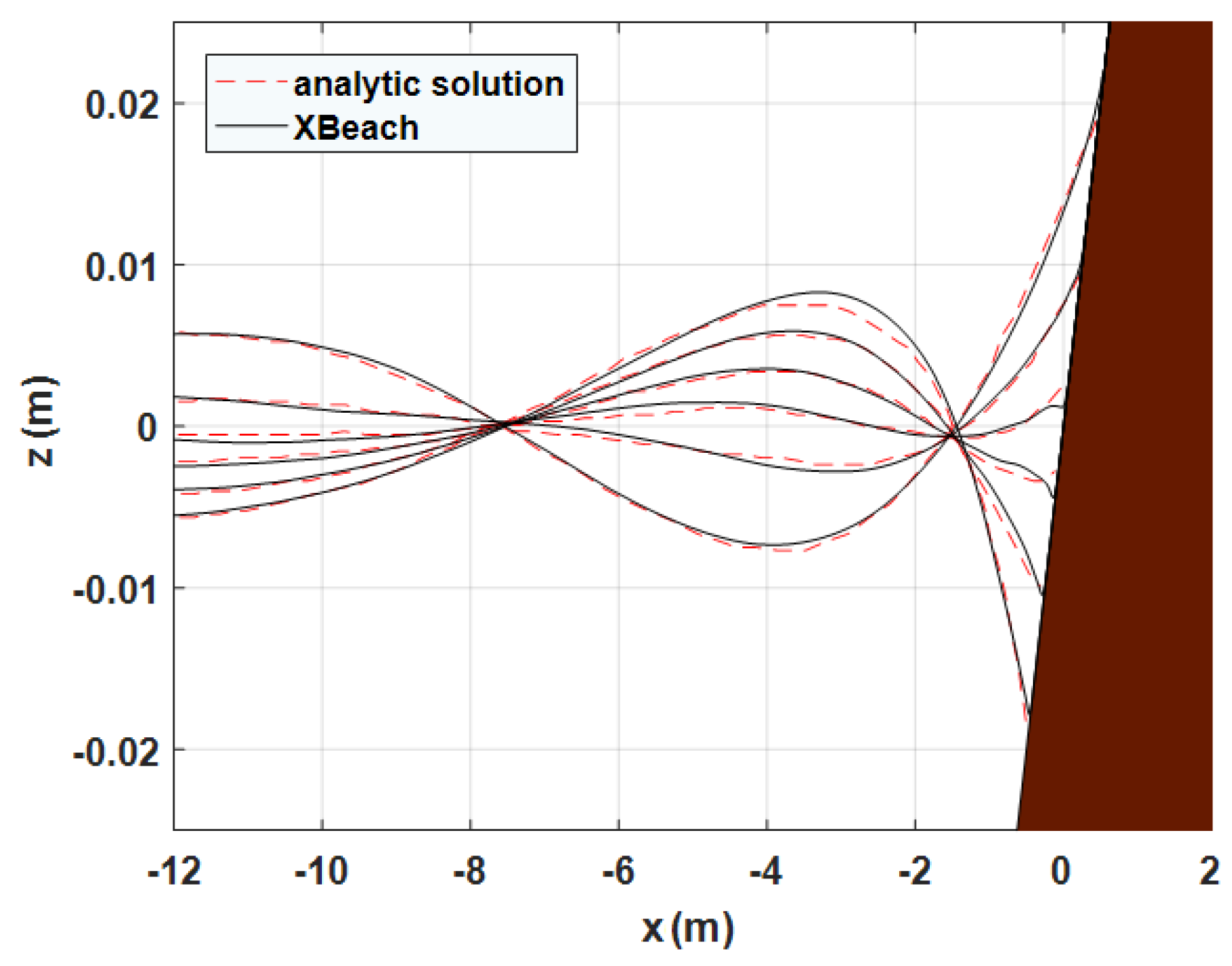
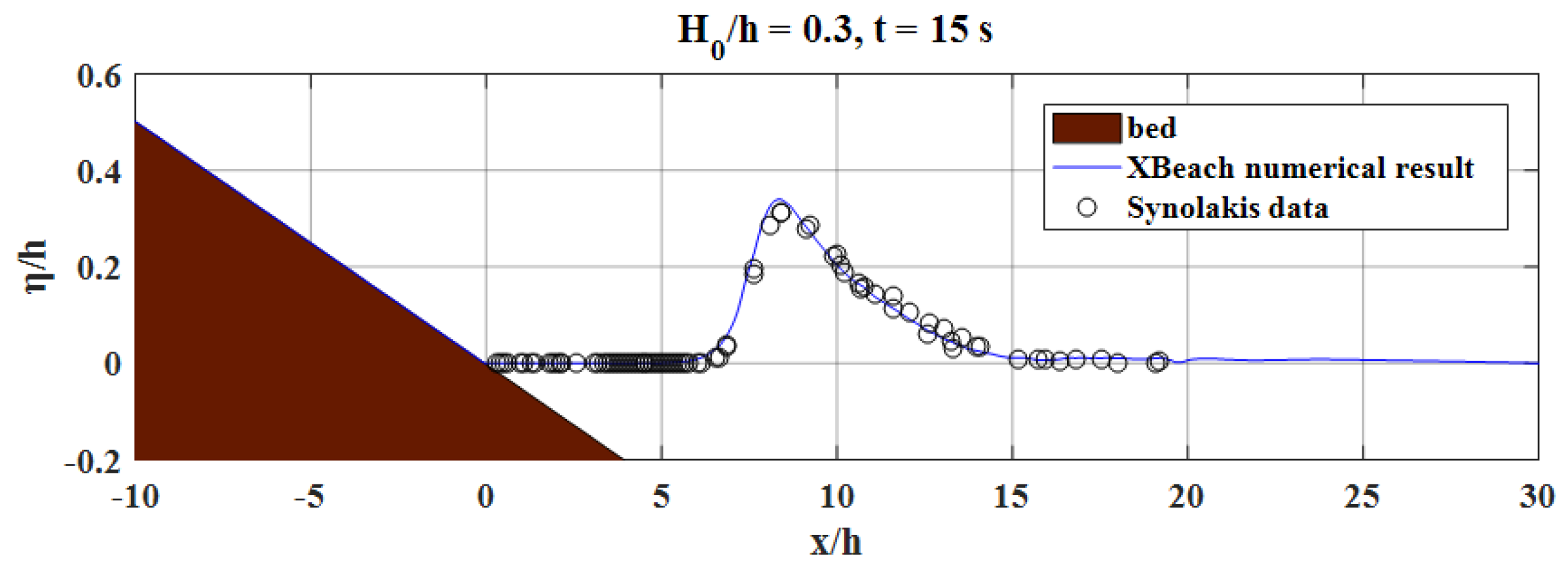
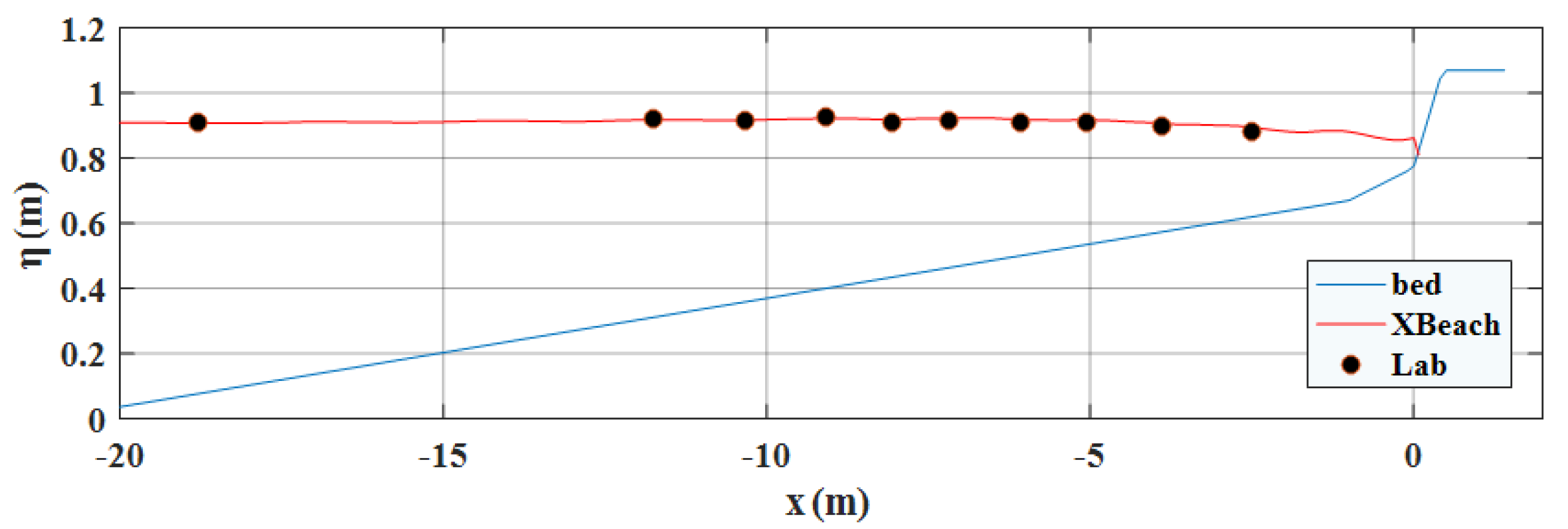
2.2. Validation
3. Results and Discussion
3.1. Numerical Experiments for Drag Coefficient
3.2. Drag Coefficient Formula
3.3. Width of the Vegetation Patch
4. Concluding Remarks
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Danielsen, F.; Sørensen, M.K.; Olwig, M.F.; Selvam, V.; Parish, F.; Burgess, N.D.; Hiraishi, T.; Karunagaran, V.M.; Rasmussen, M.S.; Hansen, L.B.; et al. The Asian Tsunami: A protective role for coastal vegetation. Science 2005, 310, 643. [Google Scholar] [CrossRef] [PubMed]
- Ranghieri, F.; Ishiwatari, M. Learning from Megadisasters: Lessons from the Great East Japan Earthquake; World Bank: Washington, DC, USA, 2014. [Google Scholar]
- Das, S.; Vincent, J.R. Mangroves protected villages and reduced death toll during Indian super cyclone. Proc. Natl. Acad. Sci. USA 2009, 106, 7357–7360. [Google Scholar] [CrossRef] [PubMed]
- Costanza, R.; Peŕez-Maqueo, O.; Martinez, M.L.; Sutton, P.; Anderson, S.J.; Mulder, K. The value of coastal wetlands for hurricane protection. Ambio 2008, 37, 241–248. [Google Scholar] [CrossRef]
- Massel, S.R.; Furukawa, K.; Brinkman, R.M. Surface wave propagation in mangrove forests. Fluid Dyn. Res. 1999, 24, 219–249. [Google Scholar] [CrossRef]
- Möller, I.; Spencer, T.; French, J.R.; Leggett, D.J.; Dixon, M. Wave transformation over salt marshes: A field and numerical modelling study from North Norfolk, England. Estuar. Coast. Shelf Sci. 1999, 49, 411–426. [Google Scholar] [CrossRef]
- Luhar, M.; Infantes, E.; Nepf, H. Seagrass blade motion under waves and its impact on wave decay. J. Geophys. Res. Oceans 2017, 122, 3736–3752. [Google Scholar] [CrossRef]
- Cavallaro, L.; Viviano, A.; Paratore, G.; Foti, E. Experiments on surface waves interacting with flexible aquatic vegetation. Ocean Sci. J. 2018, 53, 461–474. [Google Scholar] [CrossRef]
- Lei, J.; Nepf, H. Wave damping by flexible vegetation: Connecting individual blade dynamics to the meadow scale. Coast. Eng. 2019, 147, 138–148. [Google Scholar] [CrossRef]
- Tang, J.; Causon, D.; Mingham, C.; Qian, L. Numerical study of vegetation damping effects on solitary wave run-up using the nonlinear shallow water equations. Coast. Eng. 2013, 75, 21–28. [Google Scholar] [CrossRef]
- Augustin, L.N.; Irish, J.L.; Lynett, P. Laboratory and numerical studies of wave damping by emergent and near-emergent wetland vegetation. Coast. Eng. 2009, 56, 332–340. [Google Scholar] [CrossRef]
- Wu, W.; Zhang, M.; Ozeren, Y. Analysis of Vegetation Effect on Waves Using a Vertical 2D RANS Model. J. Coast. Res. 2013, 29, 383–397. [Google Scholar] [CrossRef]
- Maza, M.; Lara, J.L.; Losada, I.J. A coupled model of submerged vegetation under oscillatory flow using Navier–Stokes equations. Coast. Eng. 2013, 80, 16–34. [Google Scholar] [CrossRef]
- Kim, S.J.; Stoesser, T. Closure modeling and direct simulation of vegetation drag in flow through emergent vegetation. Water Resour. Res. 2011, 47, W10511. [Google Scholar] [CrossRef]
- Chakrabarti, A.; Chen, Q.; Smith, H.D.; Liu, D. Large eddy simulation of unidirectional and wave flows through vegetation. J. Eng. Mech. 2016, 142, 04016048. [Google Scholar] [CrossRef]
- Mei, C.C.; Chan, I.-C.; Liu, P.L.-F.; Huang, Z.; Zhang, W. Long waves through emergent coastal vegetation. J. Fluid Mech. 2011, 687, 461–491. [Google Scholar] [CrossRef]
- Liu, P.L.-F.; Chang, C.-W.; Mei, C.C.; Lomonaco, P.; Martin, F.L.; Maza, M. Periodic water waves through an aquatic forest. Coast. Eng. 2015, 96, 100–117. [Google Scholar] [CrossRef]
- Wei, G.; Kirby, J.T.; Grilli, S.T.; Subramanya, R. A fully nonlinear Boussinesq model for surface waves. Part I. Highly nonlinear unsteady waves. J. Fluid Mech. 1995, 294, 71–92. [Google Scholar] [CrossRef]
- Lynett, P.; Wu, T.-R.; Liu, P.L.-F. Modeling wave runup with depth-integrated equations. Coast. Eng. 2002, 46, 89–107. [Google Scholar] [CrossRef]
- Roelvink, D.; Reniers, A.; van Dongeren, A.; van Thiel de Vries, J.; McCall, R.; Lescinski, J. Modelling storm impacts on beaches, dunes and barrier islands. Coast. Eng. 2009, 56, 1133–1152. [Google Scholar] [CrossRef]
- Smit, P.; Stelling, G.; Roelvink, D.; van Thiel de Vries, J.; McCall, R.; van Dongeren, A.; Zwinkels, C.; Jacobs, R. XBeach: Non-Hydrostatic Model; Delft University of Technology and Deltares: Delft, The Netherlands, 2010. [Google Scholar]
- Berard, N.A.; Mulligan, R.P.; da Silva, A.M.F.; Dibajnia, M. Evaluation of XBeach performance for the erosion of a laboratory sand dune. Coast. Eng. 2017, 125, 70–80. [Google Scholar] [CrossRef]
- Jamal, M.H.; Simmonds, D.J.; Magar, V. Modelling gravel beach dynamics with XBeach. Coast. Eng. 2014, 89, 20–29. [Google Scholar] [CrossRef]
- Gallien, T.W. Validated coastal flood modeling at Imperial Beach, California: Comparing total water level, empirical and numerical overtopping methodologies. Coast. Eng. 2016, 111, 95–104. [Google Scholar] [CrossRef]
- Carrier, G.F.; Greenspan, H.P. Water waves of finite amplitude on a sloping beach. J. Fluid Mech. 1958, 4, 97–109. [Google Scholar] [CrossRef]
- Synolakis, C.E. The runup of solitary waves. J. Fluid Mech. 1987, 185, 523–545. [Google Scholar] [CrossRef]
- Løvås, S.M.; Tørum, A. Effect of the kelp Laminaria hyperborea upon sand dune erosion and water particle velocities. Coast. Eng. 2001, 44, 37–63. [Google Scholar] [CrossRef]
- Morison, J.; Johnson, J.; Schaaf, S. The force exerted by surface waves on piles. J. Pet. Technol. 1950, 2, 149–154. [Google Scholar] [CrossRef]
- Huang, Z.; Yao, Y.; Sim, S.Y.; Yao, Y. Interaction of solitary waves with emergent, rigid vegetation. Ocean Eng. 2011, 38, 1080–1088. [Google Scholar] [CrossRef]
- Koftis, T.; Prinos, P.; Stratigaki, V. Wave damping over artificial Posidonia oceanica meadow: A large-scale experimental study. Coast. Eng. 2013, 73, 71–83. [Google Scholar] [CrossRef]
- Dubi, A.; Tørum, A. Wave energy dissipation in kelp vegetation. Coast. Eng. Proc. 1996, 2, 2626–2639. [Google Scholar]
- Anderson, M.E.; Smith, J.M.; Bryant, D.B.; McComas, R.G.W. Laboratory Studies of Wave Attenuation through Artificial and Real Vegetation; ERDC TR-13-11; U.S. Army Engineer Research and Development Center: Vicksburg, MS, USA, 2013. [Google Scholar]
- Sánchez-González, J.F.; Sánchez-Rojas, V.; Memos, C.D. Wave attenuation due to Posidonia oceanica meadows. J. Hydraul. Res. 2011, 49, 503–514. [Google Scholar] [CrossRef]
- Dean, R.G.; Dalrymple, R.A. Water Wave Mechanics for Engineers and Scientists; World Scientific Publishing Company: Singapore, 1991. [Google Scholar]
- Ozeren, Y.; Wren, D.; Wu, W. Experimental investigation of wave attenuation through model and live vegetation. J. Waterw. Port. Coast. 2013, 140, 04014019. [Google Scholar] [CrossRef]
- Wu, W.-C. Effects of Wave Nonlinearity and Vertical Variation of Vegetation Density on Wave Attenuation. Ph.D. Dissertation, Oregon State University, Corvallis, OR, USA, 2015. [Google Scholar]
- Wu, W.-C.; Cox, D.T. Effects of vertical variation in vegetation density on wave attenuation. J. Waterw. Port. Coast. 2015, 142, 04015020. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group A | Group B | Group C | Group D | Group E | |
|---|---|---|---|---|---|
| Model wave | S | J | J | J | J |
| (m) | 0.02, 0.04, 0.05 | 0.28∼0.35 | 0.084∼0.187 | 0.052∼0.193 | 0.0255∼0.1179 |
| (s) | — | 2, 3, 3.5, 4 | 1.89, 2.21, 2.53, 3.79 | 1.25, 1.5, 1.75, 2, 2.25 | 1.25 |
| h (m) | 0.15 | 1.1, 1.3 | 0.4, 0.6, 0.7, 1 | 0.305, 0.457, 0.533 | 0.3, 0.5 |
| Vegetation type | R | F | F | F | F |
| (m) | 0.3 | 0.55 | 0.2 | 0.415 | 0.1 |
| (m) | 0.01 | 0.01 | 0.025 | 0.0064 | 0.003 |
| (m) | 0.545, 1.09, 1.635 | 9.8 | 9.3 | 9.8 | 9 |
| (# of stem/m) | 560 | 180, 360 | 1200 | 100, 200, 400 | 4000 |
| # of cases | 7 | 9 | 4 | 32 | 8 |
| Wu | Wu & Cox | WZOW | |
|---|---|---|---|
| Model wave | J | J | J |
| (m) | 0.041, 0.033, 0.024, 0.016 | 0.0342 | 0.034 |
| (s) | 1.6 | 1.6 | 1.2 |
| h (m) | 0.12 | 0.12 | 0.5 |
| Vegetation type | R | R | R, F |
| (m) | 0.14 | 0.14 | 0.63, 0.48 |
| (m) | 0.005 | 0.005 | 0.0094 |
| (m) | 1.8 | 0.9 | 3.66 |
| (# of stem/m) | 2100 | 1618 | 350, 623, 350 |
| # of cases | 4 | 1 | 3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, T.-Y.; Chan, I.-C. Drag Force Modeling of Surface Wave Dissipation by a Vegetation Field. Water 2020, 12, 2513. https://doi.org/10.3390/w12092513
Yang T-Y, Chan I-C. Drag Force Modeling of Surface Wave Dissipation by a Vegetation Field. Water. 2020; 12(9):2513. https://doi.org/10.3390/w12092513
Chicago/Turabian StyleYang, Tze-Yi, and I-Chi Chan. 2020. "Drag Force Modeling of Surface Wave Dissipation by a Vegetation Field" Water 12, no. 9: 2513. https://doi.org/10.3390/w12092513
APA StyleYang, T.-Y., & Chan, I.-C. (2020). Drag Force Modeling of Surface Wave Dissipation by a Vegetation Field. Water, 12(9), 2513. https://doi.org/10.3390/w12092513