A New Parallel Framework of SPH-SWE for Dam Break Simulation Based on OpenMP


 ,
,
Abstract
1. Introduction
2. Methodology
2.1. Governing Equations
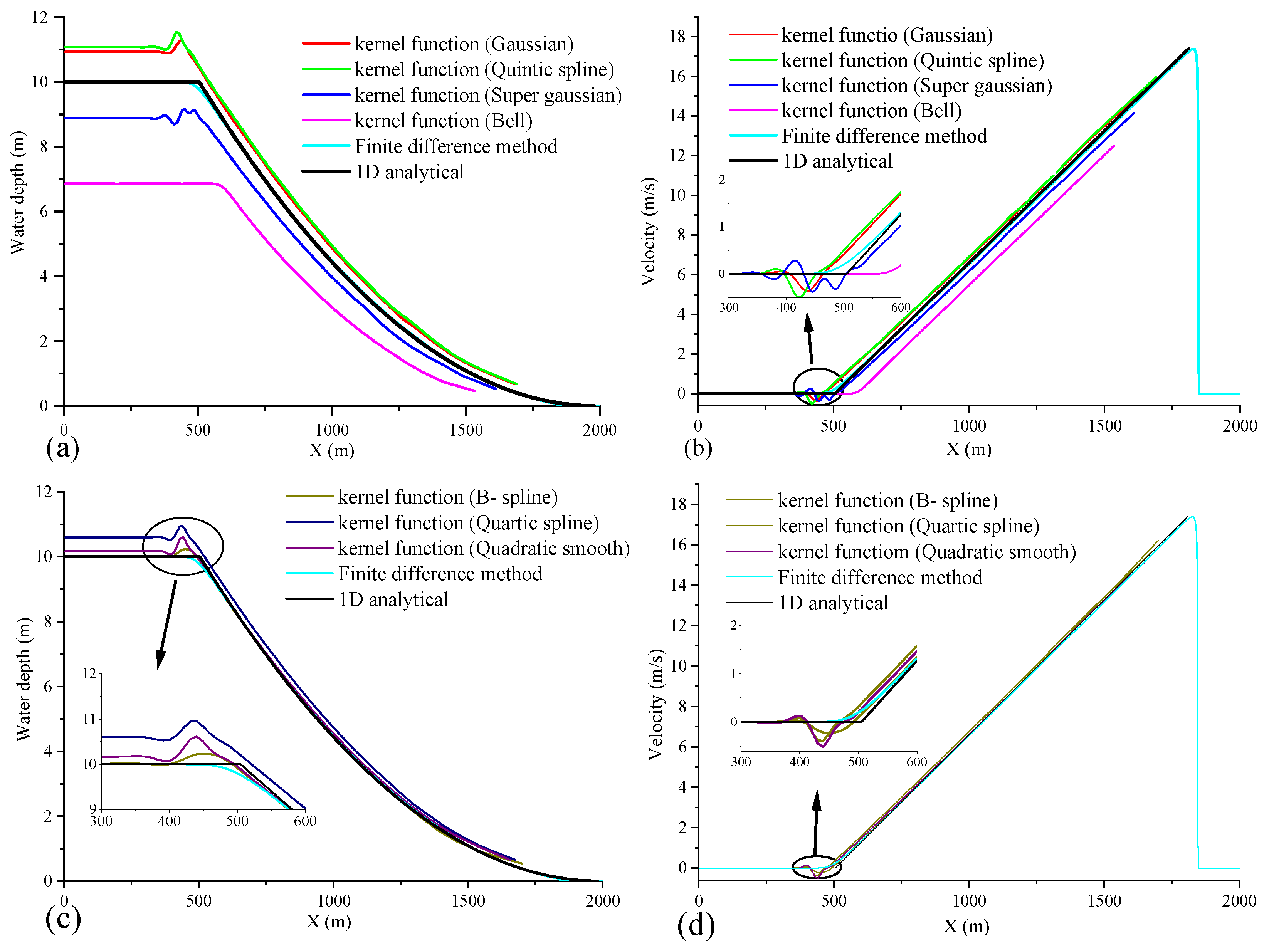
2.2. Water Depth Solutions
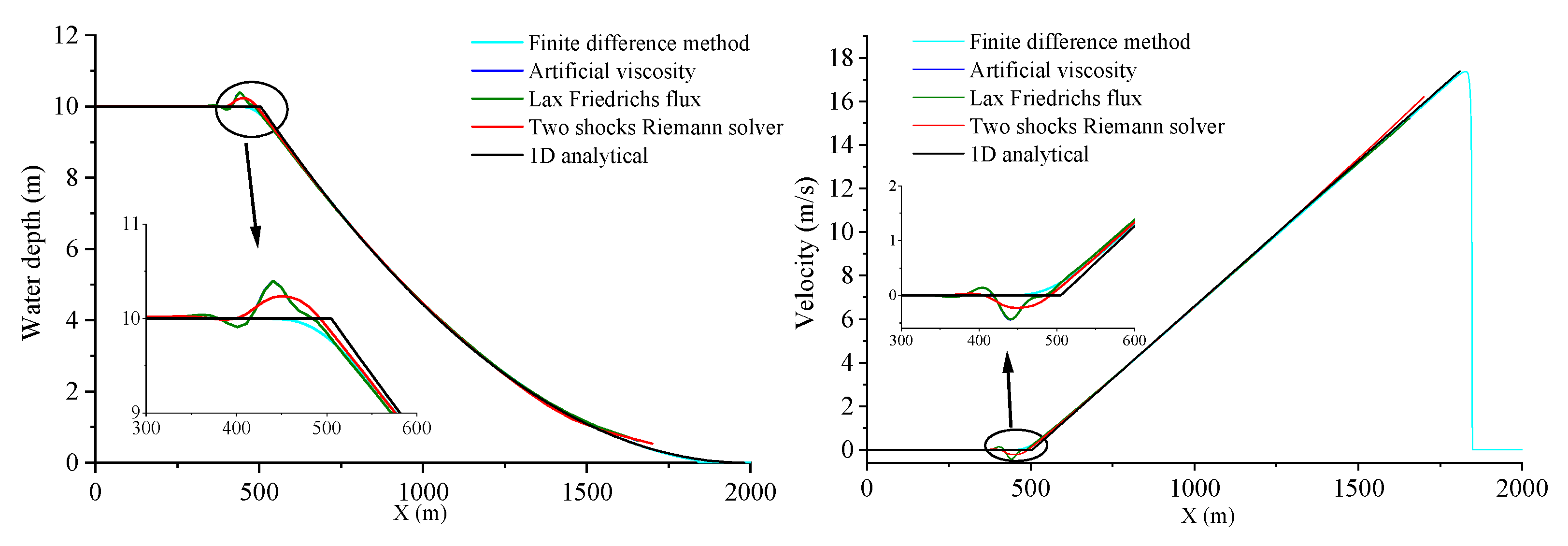
2.3. Speed Solution
2.4. Time Integration and Boundary Processing
3. SPH-SWE Model Solution Framework
| Algorithm 1. Calculation framework of the SPH-SWEs model. This algorithm is needed to read the particles data (include fluid particles/virtual particles/open boundary particle/riverbed particles). |
| Read parameters Output initial data of the model Mesh riverbed particles and calculate fluid particles and the net water depth Search particles dototal_number_of_timesteps
|
- Calculation of fluid particles in the riverbed;
- Particle search, and calculation of the water depth;
- Calculation of the fluid particle depth and velocity gradient;
- Acceleration and riverbed gradient correction;
- Calculation of velocity and displacement rate.
3.1. Fluid Particle Riverbed Calculation
| Algorithm 2. Computing fluid particle riverbed. |
| 1. Stage 1: , initialize to 0 |
| 2. !$OMP PARALLEL DO PRIVATE(private variable),& |
| 3. !$OMP& SHARED(shared variable), DEFAULT(none), SCHEDULE(static) |
| 4. do total_number_of_fluid particles |
| 5. if particle_i is valid then |
| 6. Calculate particles’ mesh locations based on the riverbed’s mesh |
| 7. ! is used to make shepard correction(CSPM) |
| 8. CALL PURE celij_hb |
| 9. endif |
| 10. enddo |
| 11. !$OMP END PARALEL DO |
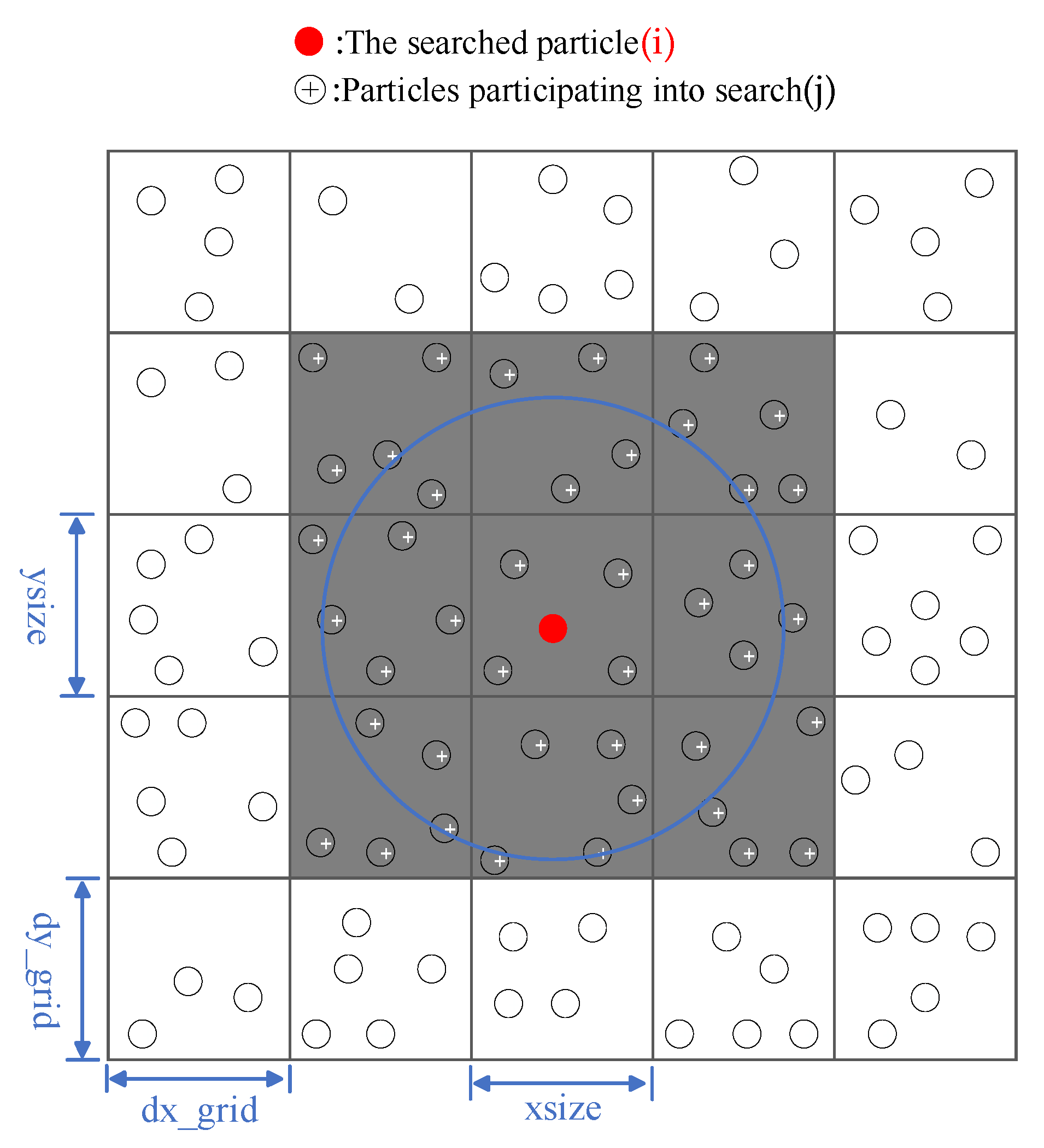
3.2. Particle Search
- Before each time step, the temporary grid position was updated, and each grid was assigned to a unique number; the grid size can be set to a fixed size dx_grid/dy_grid;
- According to the position of the current SPH particles, all the SPH particles were allocated to the temporary mesh space, and the particle chain in the mesh was established;
- According to the range (2hi) of the tight support region of particle i, the search of other meshes (- xsize to xsize, - ysize to ysize) was completed in the tight support region of the mesh, storing the mesh number;
- All the SPH particles i and j in the mesh were searched (icell-xsize to icell + size, jcell-ysize to jcell + ysize) in the tight support domain.
| Algorithm 3: The particle search. Read in the particles data (include fluid particles/virtual parti`cles/open boundary particle/riverbed particles). |
| 1. In each timestep 2. Mesh all particles based on fixed size dx_grid/dy_grid(generally select the maximum smooth length) and particles into nc array 3. ncx/ncy: total number of grids in x/y direction 4. iboxvv/iboxff/iboxob: store the virtual particles, fluid particles and open boundary particles within the affected region into two dimensional arrays 5. !$OMP PARALLEL DO PRIVATE (private variable),SHARED(shared variable),& 6. !$OMP& SHARED(shared variable),DEFAULT(none) 7. do total_number_of_fluid particles 8. if particle_i is valid then 9. Calculate mesh of the particle i:icell/jcell 10. Calculate search mesh range of particle i:xsize/yszie 11. do row -ysize,ysize 12. irow=jcell+1 13. do column -xsize,xsize 14. icolumn=icell+column 15. Calculate number of search grid: gridn 16. gridn=icolumn+(irow-1)*ncx 17. !Search for Virtual particles in the scope of I particle 18. do j nc(grindn,1) 19. if particle_i and particle_j are neighbours then 20. Write particle_j to iboxvv array 21. endif 22. enddo 23. !Search for Fluid particles in the scope of i particle 24. do j nc(grindn,2) 25. if particle_i and particle_j are neighbours then 26. Write particle_j to iboxff array 27. endif 28. enddo 29. !Search for Open boundary particles in the scope of i particle 30. do j nc(grindn,3) 31. if particle_i and particle_j are neighbours then 32. Write particle_j to iboxob array 33. endif 34. enddo 35. enddo 36. enddo 37. endif 38. enddo 39. !$OMP END PARALLEL DO |
3.3. Water Depth Calculation
| Algorithm 4: Water depth calculation. |
| 1. Stage 1: Guess for density and smoothed length 2. !$OMP PARALLEL DO PRIVATE(private variable),& 3. !$OMP& SHARED(shared variable),DEFAULT(none),SCHDULE(static) 4. do total_number_of_fluid particles 5. if particle_i is valid then 6. 1a: 7. 1b: 8. endif 9. enddo 10. !$OMP END PARALLEL DO 11. CALL particle search() %Search particles 12. Stage 2: Calculate depth 13. do while ((maxval(resmax) .gt. Minimum error) .and. (Iterationtimes .lt. max) 14. !$OMP PARALLEL DO PRIVATE(private variable),& 15. !$OMP& SHARED(shared variable),DEFAULT(none),SCHEDULE(static) 16. do total_number_of_fluid particles 17. if particle_i is valid then 18. CALL PURE fluid particle(i,rhop_sum(i),alphap(i)) 19. CALL PURE virtual particle(i,rhop_sum(i),alphap(i)) 20. CALL PURE open boundary particle((i,rhop_sum(i),alphap(i)) 21. %Calculate next step’s water depth and the smooth length 22. 23. 24. 25. 26. endif 27. enddo 28. !$OMP END PARALLEL DO 29. enddo |
3.4. Velocity Calculations
| Algorithm 5: Calculation of fluid particle velocity and water depth gradient. |
| 1. Stage 1: sum_f/alphap/grad_up/grad_vp/grad_dw=0, Initialize to 0 2. !$OMP PARALLEL DO PRIVATE(private variable),& 3. !$OMP& SHARED(shared variable),DEFAULT(none),SCHDULE(static) 4. do total_number_of_fluid particles 5. if particle_i is valid then 6. !First conduct matrix for gradient correction 7. CALL PURE celij_corr(i,sum_f (I,1:4)) 8. CALL PURE celij_alpha(i,alphap(i),grad_dw(i,1:2),grad_up(i,1:2), grad_vp(i,1:2)) 9. CALL PURE celij_alpha_vir(i,alphap(i)) 10. CALL PURE celij_alphap_ob(i,alphap(i),grad_dw(i,1:2),grad_up(i,1:2), grad_vp(i,1:2)) 11. endif 12. enddo 13. !$OMP END PARALLEL DO |
3.5. Calculation of Fluid Particle Acceleration, Riverbed Scouring, Speed, and Displacement
| Algorithm 6: Calculation of acceleration, velocity, and position. The Lagrangian equation of motion for a particle i is d/dt ∂L/(∂v_i )-∂L/(∂x_i )=0, where the Lagrangian functional L is defined in term of kinetic energy K and potential energy π as L = K-π, where π is a function of particles position but not velocity. |
| 1. Stage 1: Calculate 2. !$OMP PARALLEL DO PRIVATE(private variable),& 3. !$OMP& SHARED(shared variable),DEFAULT(none),SCHDULE(static) 4. do total_number_of_fluid particles 5. if particle_i is valid then 6. 1a. use Riemann solution to calculate 7. 1b. use Numerical viscosity to calculate 8. ! ar(i) is used to calculate depth 9. CALL PURE fluid particle(i,ar(i),ay(i),ar(i)) 10. CALL PURE virtual particle(i,ar(i),ay(i),ar(i)) 11. CALL PURE open boundary particle(i,ar(i),ay(i),ar(i)) 12. endif 13. Stage 2: Calculate 14. Stage 3: Calculate 15. Stage 4: Calculate velocity and position of fluid particle 16. enddo 17. !$OMP END PARALLEL DO |
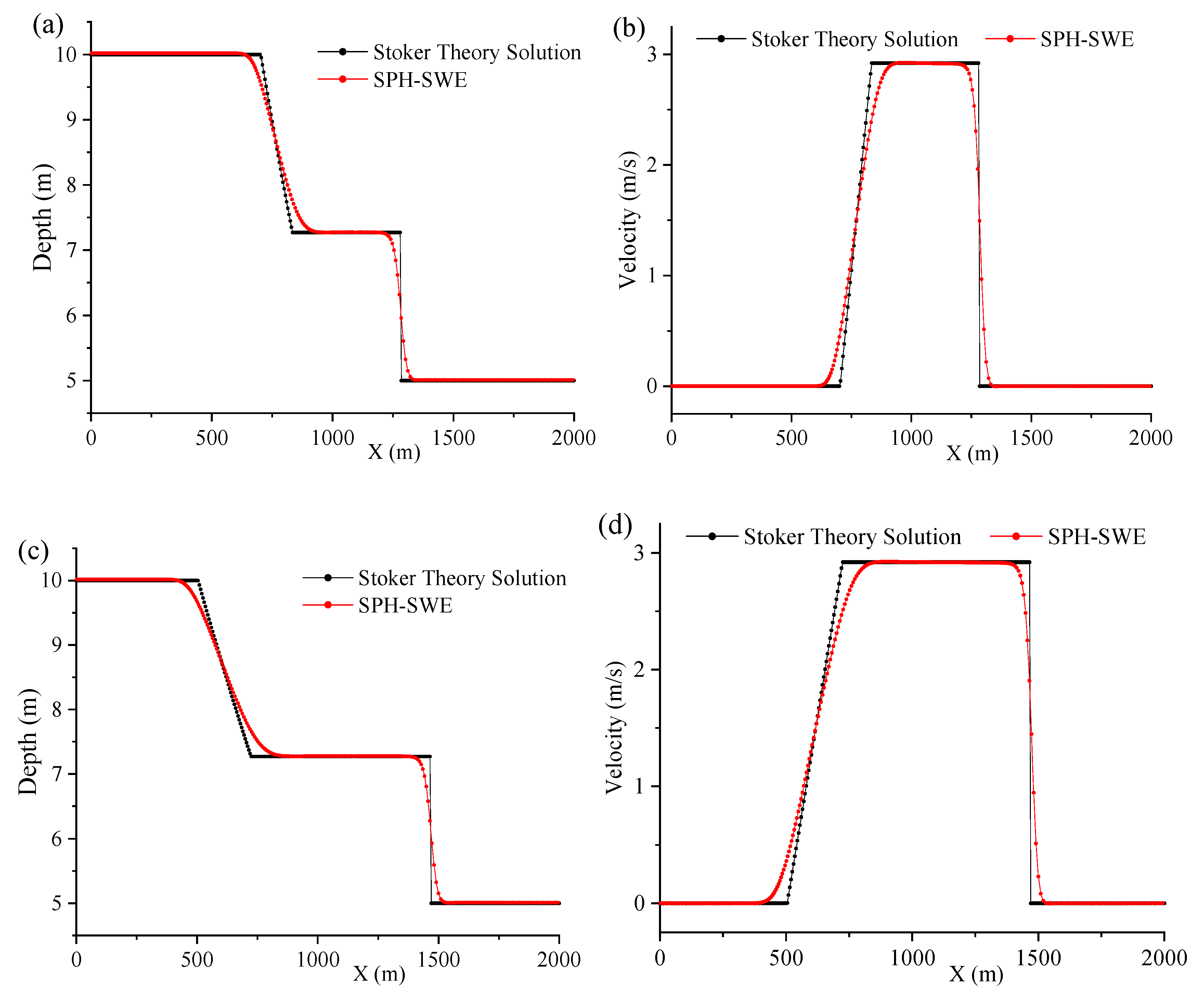
4. Applications
4.1. Validation 1: 2-D Dry Bed Dam Break with Particle Splitting
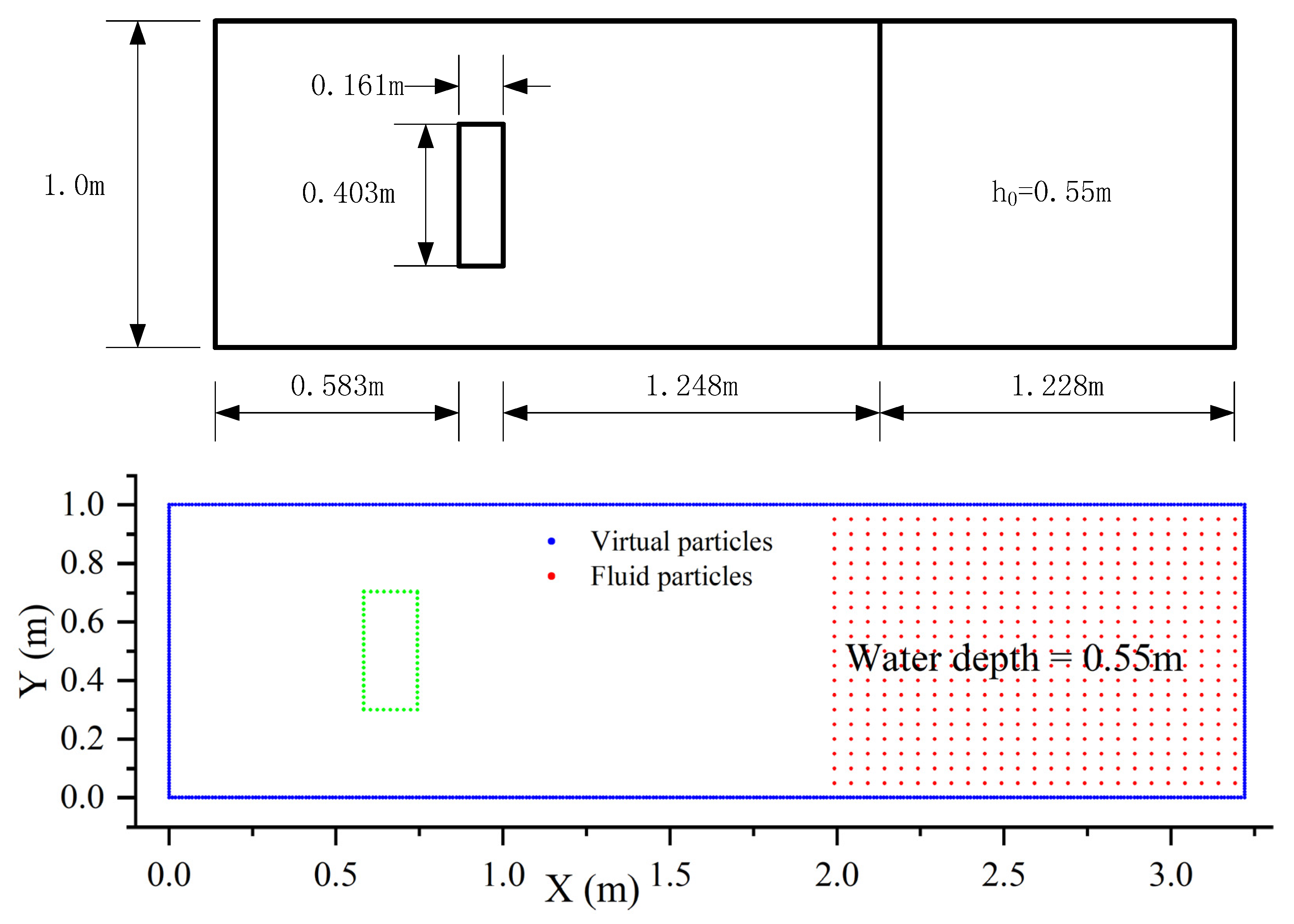
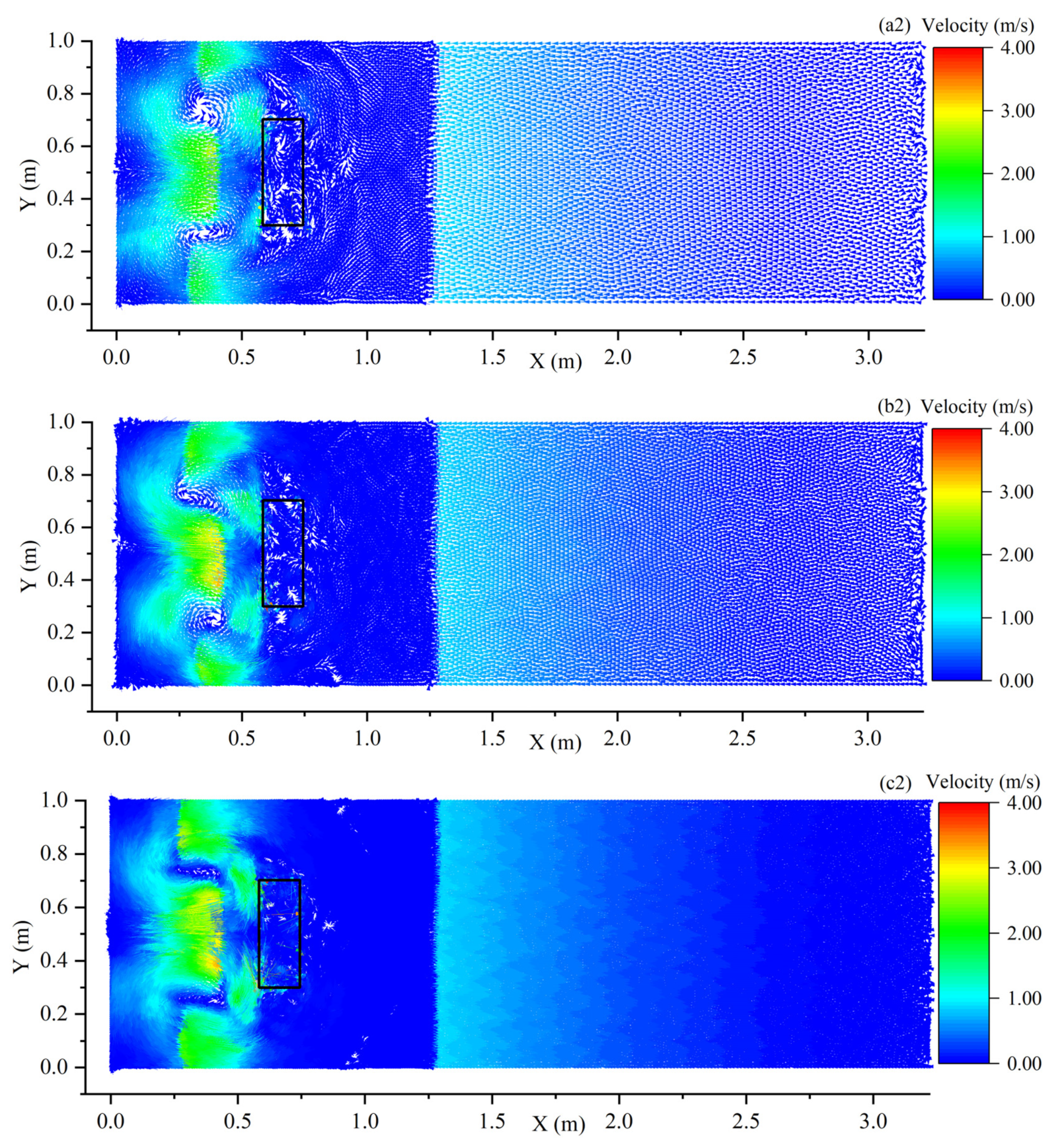
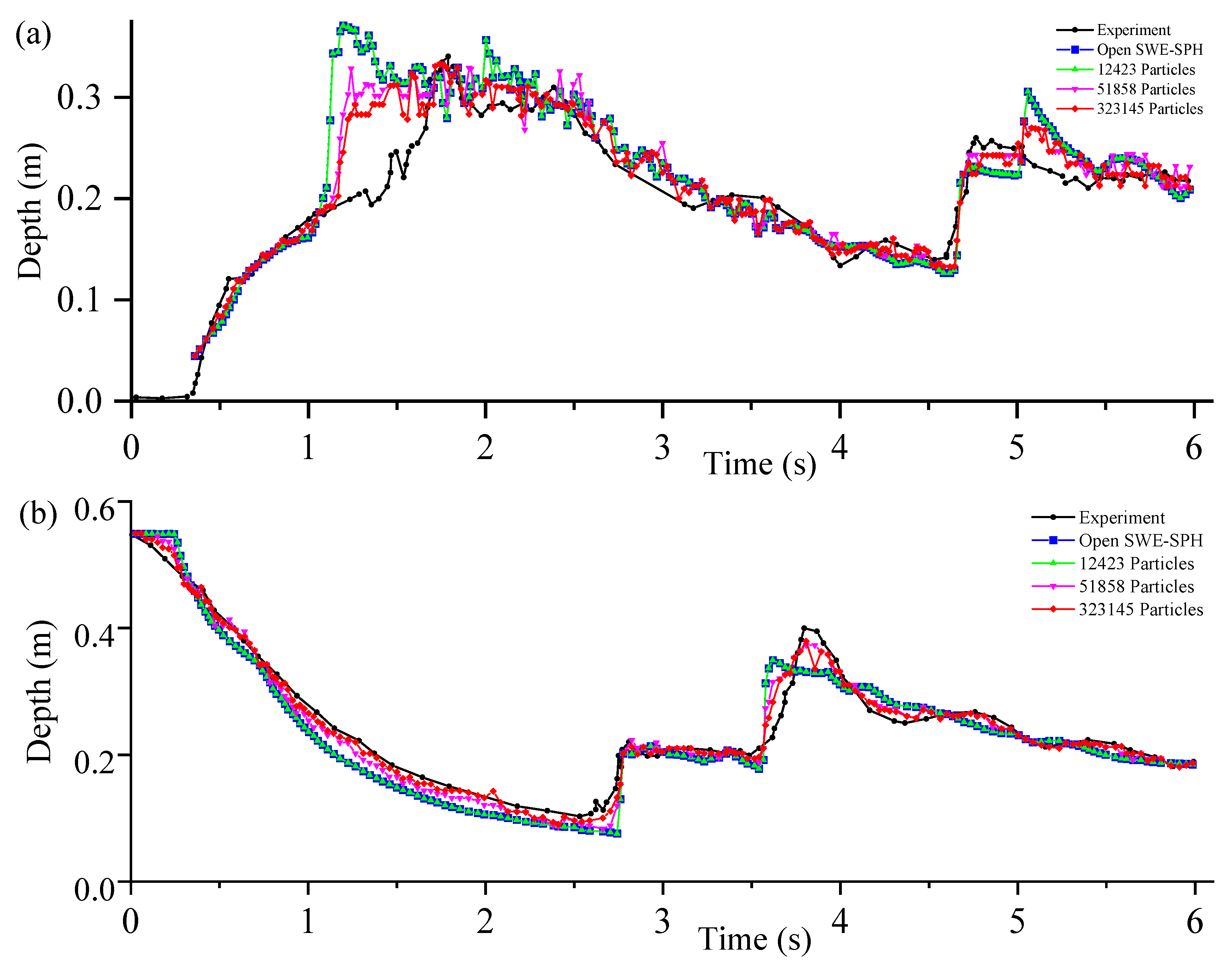
4.2. Validation 2: 2-D Dam Break with A Rectangular Obstacle Located in the Downstream Area
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chang, Y.S.; Chang, T.J. SPH simulations of solute transport in flows with steep velocity and concentration gradients. Water 2017, 9, 132. [Google Scholar] [CrossRef]
- Gu, S.; Zheng, X.; Ren, L.; Xie, H.; Huang, Y.; Wei, J.; Shao, S. SWE-SPHysics simulation of dam break flows at South-Gate Gorges Reservoir. Water 2017, 9, 387. [Google Scholar] [CrossRef]
- Chen, R.; Shao, S.; Liu, X.; Zhou, X. Applications of shallow water SPH model in mountainous rivers. J. Appl. Fluid Mech. 2015, 8, 863–870. [Google Scholar] [CrossRef]
- Peng, X.; Yu, P.; Chen, G.; Xia, M.; Zhang, Y. Development of a Coupled DDA–SPH Method and its Application to Dynamic Simulation of Landslides Involving Solid–Fluid Interaction. Rock Mech. Rock Eng. 2020, 53, 113–131. [Google Scholar] [CrossRef]
- Verbrugghe, T.; Dominguez, J.M.; Altomare, C.; Tafuni, A.; Vacondio, R.; Troch, P.; Kirtenhaus, A. Non-linear wave generation and absorption using open boundaries within DualSPHysics. Comput. Phys. Commun. 2019, 240, 46–59. [Google Scholar] [CrossRef]
- Ni, X.; Feng, W.; Huang, S.; Zhao, X.; Li, X. Hybrid SW-NS SPH models using open boundary conditions for simulation of free-surface flows. Ocean Eng. 2020, 196, 106845. [Google Scholar] [CrossRef]
- Gonzalez-Cao, J.; Altomare, C.; Crespo, A.J.C.; Dominguez, J.M.; Gomez-Gesteira, M.; Kisacik, D. On the accuracy of DualSPHysics to assess violent collisions with coastal structures. Comput. Fluids 2019, 179, 604–612. [Google Scholar] [CrossRef]
- Atif, M.M.; Chi, S.W.; Grossi, E.; Shabana, A. Evaluation of breaking wave effects in liquid sloshing problems: ANCF/SPH comparative study. Nonlinear Dyn. 2019, 97, 45–62. [Google Scholar] [CrossRef]
- Meringolo, D.D.; Marrone, S.; Colagrossi, A.; Liu, Y. A dynamic δ-SPH model: How to get rid of diffusive parameter tuning. Comput. Fluids 2019, 179, 334–355. [Google Scholar] [CrossRef]
- Shu, A.; Wang, S.; Rubinato, M.; Wang, M.; Qin, J.; Zhu, F. Numerical Modeling of Debris Flows Induced by Dam-Break Using the Smoothed Particle Hydrodynamics (SPH) Method. Appl. Sci. 2020, 10, 2954. [Google Scholar] [CrossRef]
- Wu, S.; Rubinato, M.; Gui, Q. SPH Simulation of interior and exterior flow field characteristics of porous media. Water 2020, 12, 918. [Google Scholar] [CrossRef]
- Wang, S.; Shu, A.; Rubinato, M.; Wang, M.; Qin, J. Numerical Simulation of Non-Homogeneous Viscous Debris-Flows based on the Smoothed Particle Hydrodynamics (SPH) Method. Water 2019, 11, 2314. [Google Scholar] [CrossRef]
- Gingold, R.A.; Monaghan, J.J. Smoothed particle hydrodynamics: Theory and application to non-spherical stars. Mon. Not. R. Astron. Soc. 1977, 181, 375–389. [Google Scholar] [CrossRef]
- Hopkins, P. A general class of Lagrangian smoothed particle hydrodynamics methods and implications for fluid mixing problems. Mon. Not. R. Astron. Soc. 2013, 428, 2840–2856. [Google Scholar] [CrossRef]
- Cremonesi, M.; Meduri, S.; Perego, U. Lagrangian-Eulerian enforcement of non-homogeneous boundary conditions in the Particle Finite Element Method. Comput. Part. Mech. 2020, 7, 41–56. [Google Scholar] [CrossRef]
- Sugiyama, K.; Li, S.; Takeuchi, S.; Takagi, S.; Matsumoto, Y. A full Eulerian finite difference approach for solving fluid-structure coupling problems. J. Comput. Phys. 2011, 230, 596–627. [Google Scholar] [CrossRef]
- Miller, G.H.; Colella, P. A conservative three-dimensional Eulerian method for coupled solid-fluid shock capturing. J. Comput. Phys. 2002, 183, 26–82. [Google Scholar] [CrossRef]
- Liu, M.B.; Liu, G.R. Smoothed Particle Hydrodynamics (SPH): An Overview and Recent Developments. Arch. Comput. Methods Eng. 2010, 17, 25–76. [Google Scholar] [CrossRef]
- Liu, G.R.; Liu, M.B. Smoothed Particle Hydrodynamics: A Meshfree Particle Method; World Scientific: Singapore, 2003. [Google Scholar]
- Dalrymple, R.A.; Rogers, B.D. Numerical modeling of water waves with the SPH method. Coast. Eng. 2006, 53, 141–147. [Google Scholar] [CrossRef]
- Huang, C.; Lei, J.M.; Peng, X.Y. A kernel gradient free (KGF) SPH method. Int. J. Numer. Methods Fluids 2015, 78. [Google Scholar] [CrossRef]
- Monaghan, J.J.; Kocharyan, A. SPH simulation of multi-phase flow. Comput. Phys. Commun. 1995, 87, 225–235. [Google Scholar] [CrossRef]
- Chen, A.S.; Djordjevic, S.; Leandro, J. An analysis of the combined consequences of pluvial and fluvial flooding. Water Sci. Technol. 2010, 62, 1491–1498. [Google Scholar] [CrossRef]
- Liang, Q.; Borthwick, A.G.L.; Stelling, G. Simulation of dam and dyke break hydrodynamics on dynamically adaptive quadtree grids. Int. J. Numer. Methods Fluids 2004, 46. [Google Scholar] [CrossRef]
- Chang, T.J.; Kao, H.M.; Chang, K.H.; Hsu, M.H. Numerical simulation of shallow water dam break flows in open channels using smoothed particle hydrodynamics. J. Hydrol. 2011, 408, 78–90. [Google Scholar] [CrossRef]
- Kao, H.M.; Chang, T.J. Numerical modeling of dambreak-induced flood inundation using smoothed particle hydrodynamics. J. Hydrol. 2012, 448–449, 232–244. [Google Scholar] [CrossRef]
- Colagrossi, A.; Landrini, M. Numerical simulation of interfacial flows by smoothed particle hydrodynamics. J. Comput. Phys. 2003, 191, 448–475. [Google Scholar] [CrossRef]
- Yang, F.L.; Zhang, X.F.; Tan, G.M. One and two-dimensional coupled hydrodynamics model for dam break flow. J. Hydrodyn. 2007, 19, 769–775. [Google Scholar] [CrossRef]
- Wang, Z.; Shen, H.T. Lagrangian simulation of one-dimensional dam-break flow. Hydraul. Eng. 1999, 125, 1217–1220. [Google Scholar] [CrossRef]
- Ata, R.; Soulaimani, A. A stabilized SPH method for inviscid shallow water flows. Int. J. Numer. Methods Fluids 2005, 47, 139–159. [Google Scholar] [CrossRef]
- Leffe, M.D.; Touzé, D.L.; Alessandrini, B. SPH Modeling of a shallow-water coastal flows. Hydraul. Res. 2010, 48, 118–125. [Google Scholar] [CrossRef]
- Rodriguez-Paz, M.; Bonet, J. A corrected smooth particle hydrodynamics formulation of the shallow-water equations. Comput. Struct. 2005, 83, 1396–1410. [Google Scholar] [CrossRef]
- Panizzo, A.; Longo, D.; Bellotti, G.; De Girolamo, P. Tsunamis early warning system. Part 3: SPH modeling of nlswe. In Proceedings of the XXX Convegno di Idraulica e Costruzioni Idrauliche, Rome, Italy, 10–15 September 2006. [Google Scholar]
- Vacondio, R.; Rogers, B.D.; Stansby, P.K.; Mignosa, P. A correction for balancing discontinuous bed slopes in two-dimensional smoothed particle hydrodynamics shallow water modeling. Int. J. Numer. Methods Fluids 2013, 71, 850–872. [Google Scholar] [CrossRef]
- Vacondio, R.; Rogers, B.D.; Stansby, P.K.; Mignosa, P. SPH Modeling of Shallow Flow with Open Boundaries for Practical Flood Simulation. J. Hydraul. Eng. 2012, 138, 530–541. [Google Scholar] [CrossRef]
- Vacondio, R.; Rogers, B.D.; Stansby, P.K.; Mignosa, P. Smoothed Particle Hydrodynamics: Approximate zero-consistent 2-D boundary conditions and still shallow water tests. Int. J. Numer. Methods Fluids 2011, 69, 226–253. [Google Scholar] [CrossRef]
- Vacondio, R.; Rogers, B.D.; Stansby, P.K. Accurate particle splitting for SPH in shallow water with shock capturing. Int. J. Numer. Methods Fluids 2012, 69, 1377–1410. [Google Scholar] [CrossRef]
- Skillen, A.; Lind, S.J.; Stansby, P.K.; Rogers, B.D. Incompressible Smoothed Particle Hydrodynamics (SPH) with reduced temporal noise and generalised Fickian smoothing applied to body-water slam and efficient wave-body interaction. Comput. Methods Appl. Mech. Eng. 2013, 265, 163–173. [Google Scholar] [CrossRef]
- Fourtakas, G.; Rogers, B.D.; Laurence, D.R.P. Modelling Sediment resuspension in Industrial tanks using SPH. Houille Blanche 2013, 2, 39–45. [Google Scholar] [CrossRef]
- St-Germain, P.; Nistor, I.; Townsend, R.; Shibayama, T. Smoothed-Particle Hydrodynamics Numerical Modeling of Structures Impacted by Tsunami Bores. J. Waterw. Port Coast. Ocean Eng. 2014, 140, 66–81. [Google Scholar] [CrossRef]
- Cunningham, L.S.; Rogers, B.D.; Pringgana, G. Tsunami wave and structure interaction: An investigation with smoothed-particle hydrodynamics. Proc. Inst. Civ. Eng. Eng. Comput. Mech. 2014, 167, 106–116. [Google Scholar] [CrossRef]
- Aureli, F.; Dazzi, S.; Maranzoni, A.; Mignosa, P.; Vacondio, R. Experimental and numerical evaluation of the force due to the impact of a dam-break wave on a structure. Adv. Water Resour. 2015, 76, 29–42. [Google Scholar] [CrossRef]
- Canelas, R.B.; Domínguez, J.M.; Crespo, A.J.C.; Gómez-Gesteira, M.; Ferreira, R.M.L. A Smooth Particle Hydrodynamics discretization for the modelling of free surface flows and rigid body dynamics. Int. J. Numer. Methods Fluids 2015, 78, 581–593. [Google Scholar] [CrossRef]
- Heller, V.; Bruggemann, M.; Spinneken, J.; Rogers, B.D. Composite modelling of subaerial landslide–tsunamis in different water body geometries and novel insight into slide and wave kinematics. Coast. Eng. 2016, 109, 20–41. [Google Scholar] [CrossRef]
- Fourtakas, G.; Rogers, B.D. Modelling multi-phase liquid-sediment scour and resuspension induced by rapid flows using Smoothed Particle Hydrodynamics (SPH) accelerated with a graphics processing unit (GPU). Adv. Water Resour. 2016, 92, 186–199. [Google Scholar] [CrossRef]
- Mokos, A.; Rogers, B.D.; Stansby, P.K. A multi-phase particle shifting algorithm for SPH simulations of violent hydrodynamics with a large number of particles. J. Hydraul. Res. 2017, 55, 143–162. [Google Scholar] [CrossRef]
- Alshaer, A.W.; Rogers, B.D.; Li, L. Smoothed Particle Hydrodynamics (SPH) modelling of transient heat transfer in pulsed laser ablation of Al and associated free-surface problems. Comput. Mater. Sci. 2017, 127, 161–179. [Google Scholar] [CrossRef]
- Sun, P.N.; Colagrossi, A.; Marrone, S.; Antuono, M.; Zhang, A.M. A consistent approach to particle shifting in the δ-Plus-SPH model. Mech. Eng. 2019, 348, 912–934. [Google Scholar] [CrossRef]
- Sun, P.; Zhang, A.M.; Marrone, S.; Ming, F. An accurate and efficient SPH modeling of the water entry of circular cylinders. Appl. Ocean Res. 2018, 72, 60–75. [Google Scholar] [CrossRef]
- Zheng, X.; Shao, S.; Khayyer, A.; Duan, W.; Ma, Q.; Liao, K. Corrected first-order derivative ISPH in water wave simulations. Coast. Eng. J. 2017, 59. [Google Scholar] [CrossRef]
- Luo, M.; Reeve, D.; Shao, S.; Karunarathna, H.; Lin, P.; Cai, H. Consistent Particle Method simulation of solitary wave impinging on and overtopping a seawall. Eng. Anal. Bound. Elem. 2019, 103, 160–171. [Google Scholar] [CrossRef]
- Ran, Q.; Tong, J.; Shao, S.; Fu, X.; Xu, Y. Incompressible SPH scour model for movable bed dam break flows. Adv. Water Resour. 2015, 82, 39–50. [Google Scholar] [CrossRef]
- Xia, X.; Liang, Q. A GPU-accelerated smoothed particle hydrodynamics (SPH) model for the shallow water equations. Environ. Model. Softw. 2016, 75, 28–43. [Google Scholar] [CrossRef]
- Liang, Q.; Xia, X.; Hou, J. Catchment-scale High-resolution Flash Flood Simulation Using the GPU-based Technology. Procedia Eng. 2016, 154, 975–981. [Google Scholar] [CrossRef]
- Satake, S.I.; Yoshimori, H.; Suzuki, T. Optimazations of a GPU accelerated heat conduction equation by a programming of CUDA Fortran from an analysis of a PTX file. Comput. Phys. Commun. 2012, 183, 2376–2385. [Google Scholar] [CrossRef]
- Yang, C.T.; Huang, C.L.; Lin, C.F. Hybrid CUDA, OpenMP, and MPI parallel programming on multicore GPU clusters. Comput. Phys. Commun. 2011, 182, 266–269. [Google Scholar] [CrossRef]
- Ohshima, S.; Hirasawa, S.; Honda, H. OMPCUDA: OpenMP Execution Framework for CUDA Based on Omni OpenMP Compiler. In Beyond Loop Level Parallelism in OpenMP: Accelerators, Tasking and More; Sato, M., Hanawa, T., Müller, M.S., Chapman, B.M., de Supinski, B.R., Eds.; IWOMP 2010. Lecture Notes in Computer Science, 6132; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar] [CrossRef]
- Loncar, V.; Young, S.L.E.; Skrbic, S.; Muruganandam, P.; Adhikari, S.; Balaz, A. OpenMP, OpenMP/MPI, and CUDA/MPI C programs for solving the time-dependent dipolar Gross-Pitaevskii equation. Comput. Phys. Commun. 2016, 209, 190–196. [Google Scholar] [CrossRef]
- Bronevetsky, G.; Marques, D.; Pingali, K.; McKee, S.; Rugina, R. Compiler-enhanced incremental checkpointing for OpenMP applications. In Proceedings of the 2009 IEEE International Symposium on Parallel & Distributed Processing, Rome, Italy, 23–29 May 2009; pp. 1–12. [Google Scholar] [CrossRef]
- Dagum, L.; Menon, R. OpenMP: An industry standard API for shared-memory programming. IEEE Comput. Sci. Eng. 1998, 5, 46–55. [Google Scholar] [CrossRef]
- Slabaugh, G.; Boyes, R.; Yang, X. Multicore Image Processing with OpenMP [Applications Corner]. IEEE Signal Process. Mag. 2010, 27, 134–138. [Google Scholar] [CrossRef]
- Chorley, M.J.; Walker, D.W. Performance analysis of a hybrid MPI/OpenMP application on multi-core clusters. J. Comput. Sci. 2010, 1, 168–174. [Google Scholar] [CrossRef]
- Adhianto, L.; Chapman, B. Performance modeling of communication and computation in hybrid MPI and OpenMP applications. Simul. Model. Pract. Theory 2007, 15, 481–491. [Google Scholar] [CrossRef]
- Wright, S.J. Parallel algorithms for banded linear systems. Siam J. Sci. Stat. Comput. 1991, 12, 824–842. [Google Scholar] [CrossRef]
- Jiao, Y.-Y.; Zhao, Q.; Wang, L. A hybrid MPI/OpenMP parallel computing model for spherical discontinuous deformation analysis. Comput. Geotech. 2019, 106, 217–227. [Google Scholar] [CrossRef]
- Przemysław, S. Algorithmic and language-based optimization of Marsa-LFIB4 pseudorandom number generator using OpenMP, OpenACC and CUDA. J. Parallel Distrib. Comput. 2020, 137, 238–245. [Google Scholar]
- Vacondio, R. Shallow Water and Navier-Stokes SPH-Like Numerical Modelling of Rapidly Varying Free-Surface Flows. Ph.D. Thesis, Università degli Studi di Parma, Parma, Italy, 2010. [Google Scholar]
- Vacondio, R.; Rodgers, B.D.; Stansby, P.K.; Mignosa, P. User Guide for the SWE-SPHysics Code. 2013. Available online: https://wiki.manchester.ac.uk/sphysics/images/SWE-SPHysics_v1.0.00.pdf (accessed on 2 April 2020).
- Marion, J.; Thornton, S. Classical Dynamics of Particles and Systems; Harcourt Brace Jovanovich Inc.: San Diego, CA, USA, 1988. [Google Scholar]
- Monaghan, J.J. Smoothed particle hydrodynamics. Rep. Prog. Phys. 2005, 68, 1703–1759. [Google Scholar] [CrossRef]
- Bonet, J.; Lok, T.-S.L. Variational and momentum preservation aspects of Smooth Particle Hydrodynamic formulations. Comput. Methods Appl. Mech. Eng. 1999, 180, 97–115. [Google Scholar] [CrossRef]
- Vila, J.P. On particle weighted methods and smooth particle hydrodynamics. Math. Models Methods Appl. Sci. 1999, 9, 161–209. [Google Scholar] [CrossRef]
- Dinshaw, B.S. Von Neumann stability analysis of smoothed particle hydrodynamics—Suggestions for optimal algorithms. J. Comput. Phys. 1995, 121, 357–372. [Google Scholar]
- Toro, E. Direct Riemann solvers for the time-dependent Euler equations. Shock Waves 1995, 5, 75–80. [Google Scholar] [CrossRef]
- Hernquist, L.; Katz, N. TREESPH: A unification of SPH with the hierarchical tree method. Astrophys. J. Suppl. 1989, 70, 419–446. [Google Scholar] [CrossRef]
- Toro, E. Shock Capturing Methods for Free Surface Shallow Water Flows; Wiley: New York, NY, USA, 1999. [Google Scholar]
- Nikolaos, D.K. A dissipative galerkin scheme for open-channel flow. Hydraul. Eng. 1984, 110, 337–352. [Google Scholar]
- Majda, A.; Osher, S. Numerical viscosity and the entropy condition. Commun. Pure Appl. Math. 1979. [Google Scholar] [CrossRef]
- Stranex, T.; Wheaton, S. A new corrective scheme for SPH. Comput. Methods Appl. Mech. Eng. 2011, 200, 392–402. [Google Scholar] [CrossRef]
- Monaghan, J.J.; Gingold, R.A. Shock simulation by the particle method SPH. J. Comput. Phys. 1983, 52, 374–389. [Google Scholar] [CrossRef]
- Monaghan, J.J. Particle methods for hydrodynamics. Comput. Phys. Rep. 1985, 3, 71–124. [Google Scholar] [CrossRef]
- Chen, F.; Qiang, H.; Gao, W. Coupling of smoothed particle hydrodynamics and finite volume method for two-dimensional spouted beds. Comput. Chem. Eng. 2015, 77, 135–146. [Google Scholar] [CrossRef]
- Kleefsman, K.M.T.; Fekken, G.; Veldman, A.E.P.; Iwanowski, B.; Buchner, B. A volume-of-fluid based simulation method for wave impact problems. J. Comput. Phys. 2005, 206, 363–393. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Artificial Viscosity | Lax Friedrichs Flux | Two-Shocks Riemann Solver | |
|---|---|---|---|---|
| Mean Absolute Error | Speed | 0.0617 | 0.0476 | 0.0351 |
| WD | 0.0515 | 0.0482 | 0.0356 | |
| Mean Relative Error | Speed | 0.0718 | 0.0667 | 0.0586 |
| WD | 0.0142 | 0.0089 | 0.0092 | |
| Standard deviation of error | Speed | 0.1042 | 0.0728 | 0.0568 |
| WD | 0.0681 | 0.0633 | 0.0484 |
| Parameters | 30 s | 50 s | |
|---|---|---|---|
| Mean Absolute Error | Speed | 0.0529 | 0.0603 |
| Water Depth | 0.0567 | 0.0613 | |
| Mean Relative Error | Speed | 0.0548 | 0.1037 |
| Water Depth | 0.0075 | 0.0081 | |
| Standard deviation of error | Speed | 0.1543 | 0.1514 |
| Water Depth | 0.1257 | 0.1238 |
| Case | Number of Fluid Particles | Number of Virtual Particles | Number of Riverbed Particles |
|---|---|---|---|
| Case 1 | 4374 | 1276 | 14,094 |
| Case 2 | 9801 | 3300 | 31,581 |
| Case 3 | 38,801 | 9424 | 125,561 |
| Cases | ||||||
|---|---|---|---|---|---|---|
| Open Source Code (Case 1) | N/A | 1040.44 | 213.12 | 1253.56 | 1.0 | |
| Parallel Operation Code | Single Core | 87.47 | 174.95 | 49.99 | 312.41 | 4.01 |
| 2000 | 60.27 | 118.38 | 36.59 | 215.24 | 5.82 | |
| 1000 | 36.43 | 70.34 | 18.84 | 125.61 | 9.98 | |
| Open Source Code (Case 2) | N/A | 5892.29 | 1039.82 | 6932.11 | 1.0 | |
| Parallel Operation Code | Single Core | 338.853 | 643.8207 | 146.8363 | 1129.51 | 6.14 |
| 2000 | 116.8514 | 218.6252 | 41.4634 | 376.94 | 18.39 | |
| 1000 | 75.2985 | 150.597 | 33.7545 | 259.65 | 26.70 | |
| Open Source Code (Case 3) | N/A | 107,218.04 | 16,021.09 | 123,239.13 | 1.0 | |
| Parallel Operation Code | Single Core | 5498.28 | 10,481.09 | 1202.75 | 17,182.12 | 7.17 |
| 2000 | 554.20 | 990.83 | 134.35 | 1679.38 | 73.38 | |
| Number of Single-Thread Particles (pcs) | ||||
|---|---|---|---|---|
| 2000 | 20 | 1679.38 | 10.23 | 51.16 |
| 2500 | 16 | 1759.15 | 9.77 | 61.05 |
| 3000 | 13 | 1833.58 | 9.37 | 72.08 |
| 4000 | 10 | 1935.12 | 8.88 | 88.79 |
| 5000 | 8 | 2300.79 | 7.47 | 93.35 |
| 6000 | 7 | 2579.88 | 6.66 | 95.14 |
| 7000 | 6 | 2934.02 | 5.86 | 97.60 |
| 8000 | 5 | 3455.94 | 4.97 | 99.44 |
| 10,000 | 4 | 4312.39 | 3.98 | 99.61 |
| 20,000 | 2 | 8616.82 | 1.99 | 99.70 |
| Case | Particle Spacing | Number of Fluid Particles | Number of Virtual Particles | Number of Riverbed Particles | T8 (s) | T (s) |
|---|---|---|---|---|---|---|
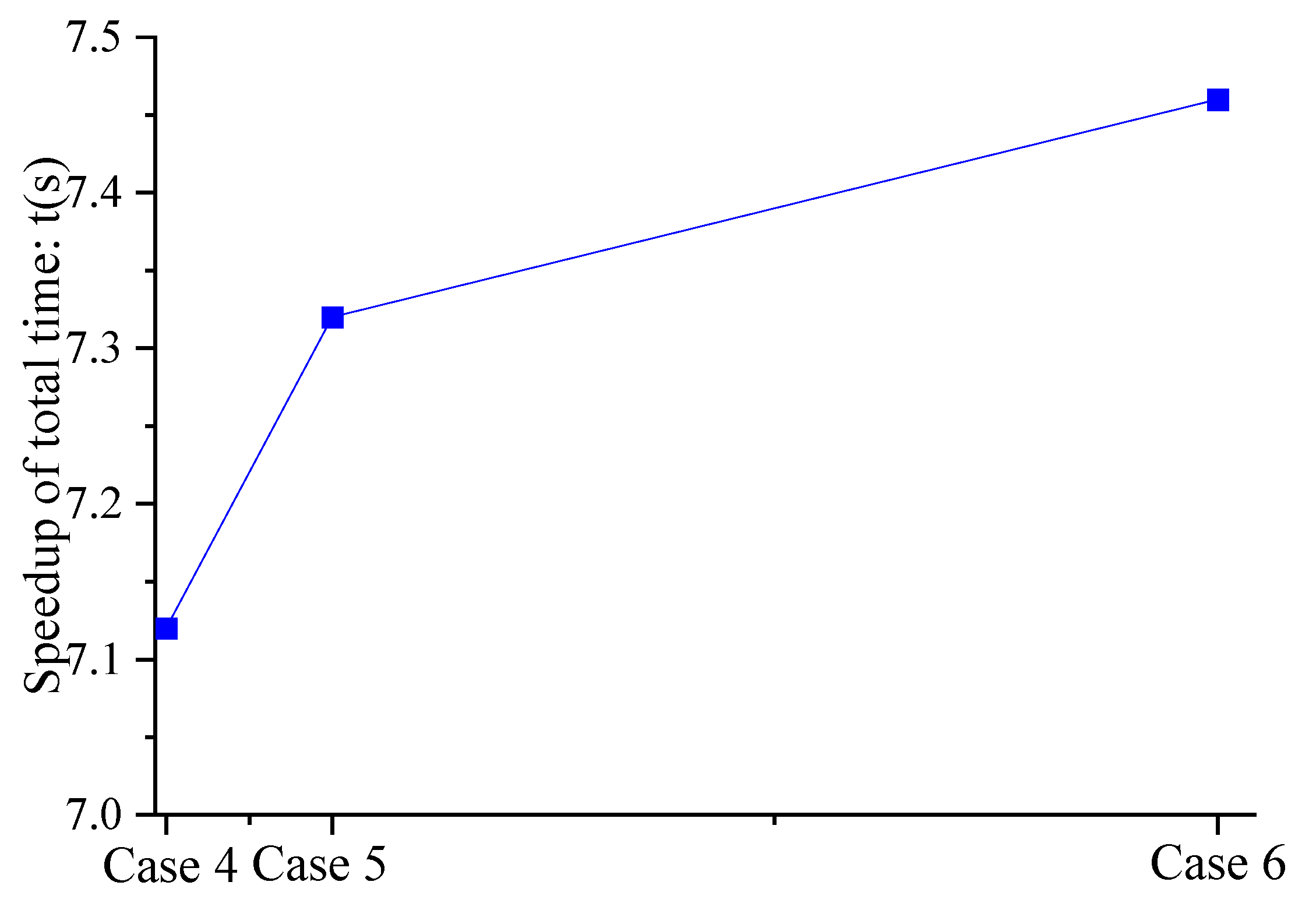
| Case 4 | 0.01 | 12,423 | 4798 | 129,645 | 1511.38 | 7.12 |
| Case 5 | 0.005 | 51,858 | 9582 | 516,889 | 14,538.83 | 7.32 |
| Case 6 | 0.002 | 323,145 | 23,934 | 807,111 | 108,868.42 | 7.46 |
| Cases | R (t) | C (t) | A (t) | T8 (s) | t (s) |
|---|---|---|---|---|---|
| Case 4 | 468.53 | 876.60 | 166.25 | 1511.38 | 7.12 |
| Case 5 | 4216.26 | 8432.52 | 1890.05 | 14,538.83 | 7.32 |
| Case 6 | 34,837.91 | 66,409.72 | 7620.80 | 108,868.42 | 7.46 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Tian, L.; Rubinato, M.; Gu, S.; Yu, T.; Xu, Z.; Cao, P.; Wang, X.; Zhao, Q. A New Parallel Framework of SPH-SWE for Dam Break Simulation Based on OpenMP. Water 2020, 12, 1395. https://doi.org/10.3390/w12051395
Wu Y, Tian L, Rubinato M, Gu S, Yu T, Xu Z, Cao P, Wang X, Zhao Q. A New Parallel Framework of SPH-SWE for Dam Break Simulation Based on OpenMP. Water. 2020; 12(5):1395. https://doi.org/10.3390/w12051395
Chicago/Turabian StyleWu, Yushuai, Lirong Tian, Matteo Rubinato, Shenglong Gu, Teng Yu, Zhongliang Xu, Peng Cao, Xuhao Wang, and Qinxia Zhao. 2020. "A New Parallel Framework of SPH-SWE for Dam Break Simulation Based on OpenMP" Water 12, no. 5: 1395. https://doi.org/10.3390/w12051395
APA StyleWu, Y., Tian, L., Rubinato, M., Gu, S., Yu, T., Xu, Z., Cao, P., Wang, X., & Zhao, Q. (2020). A New Parallel Framework of SPH-SWE for Dam Break Simulation Based on OpenMP. Water, 12(5), 1395. https://doi.org/10.3390/w12051395