Comparative Study on Violent Sloshing with Water Jet Flows by Using the ISPH Method


Abstract
1. Introduction
2. ISPH Methodology
2.1. Governing Equations
2.2. Particle Approximation
2.3. Poisson Pressure Equation
2.4. Calculation of Spatial Derivatives
2.5. Inlet Boundary Treatment
3. Numerical Results and Validation
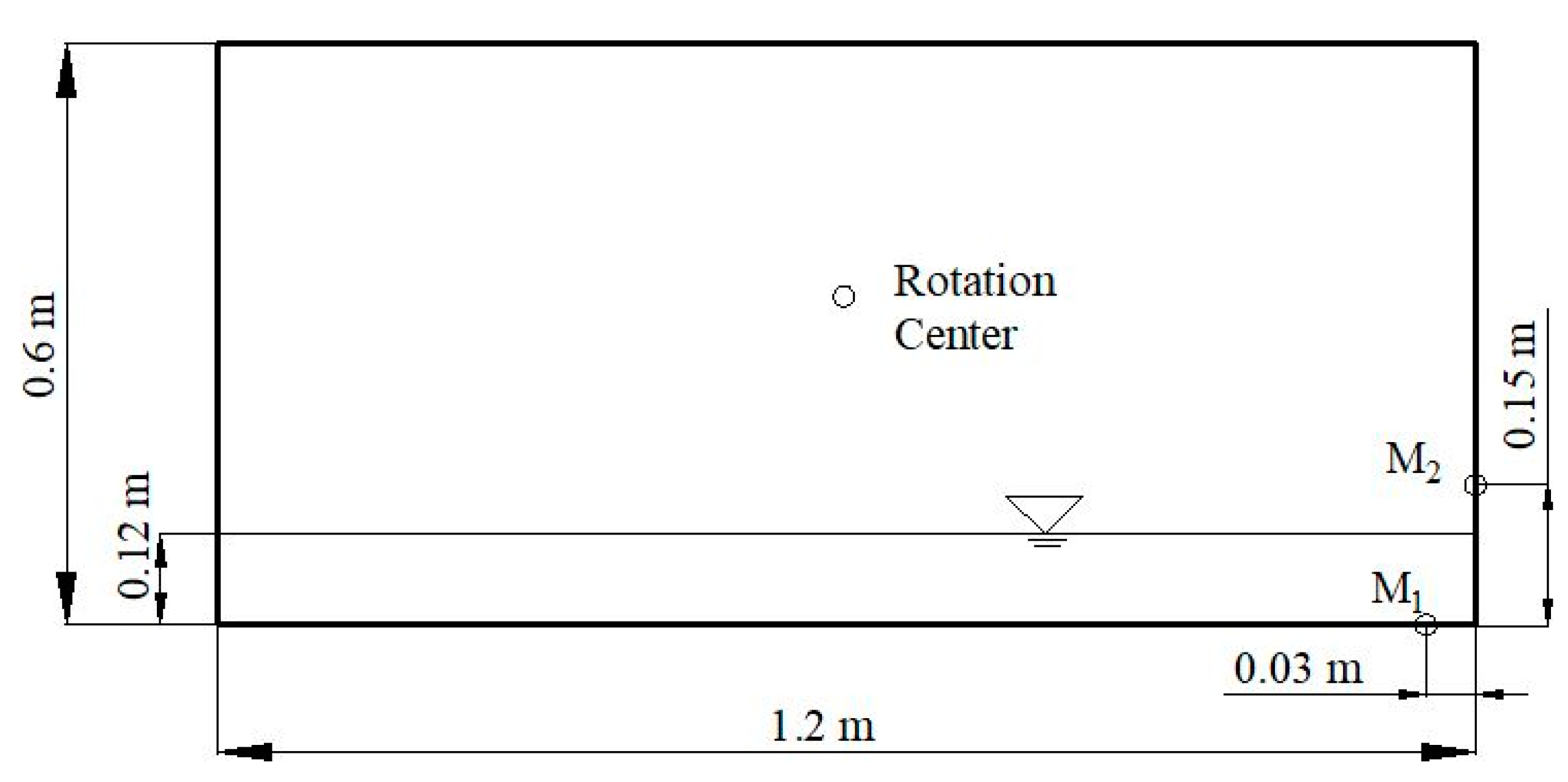
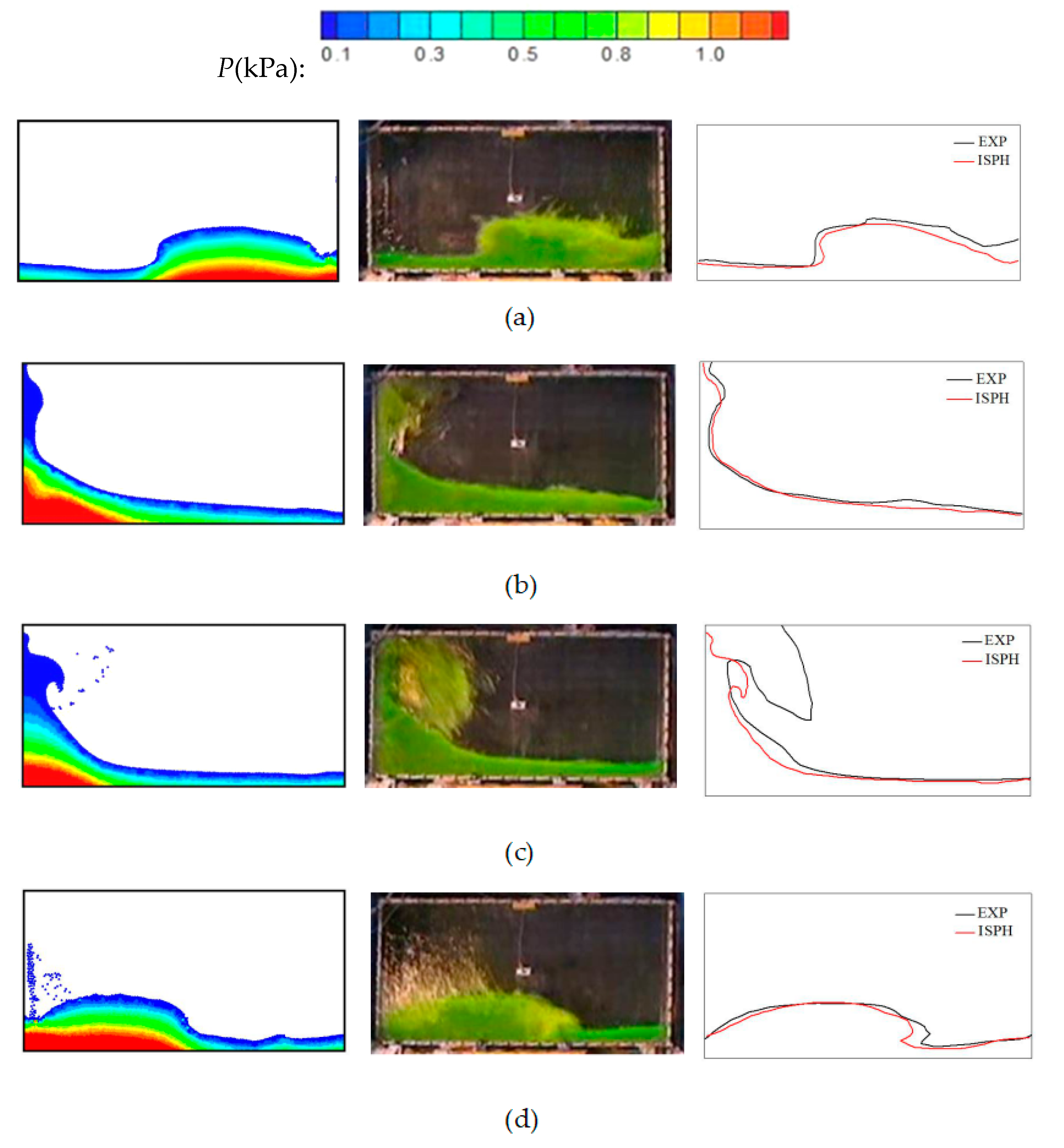
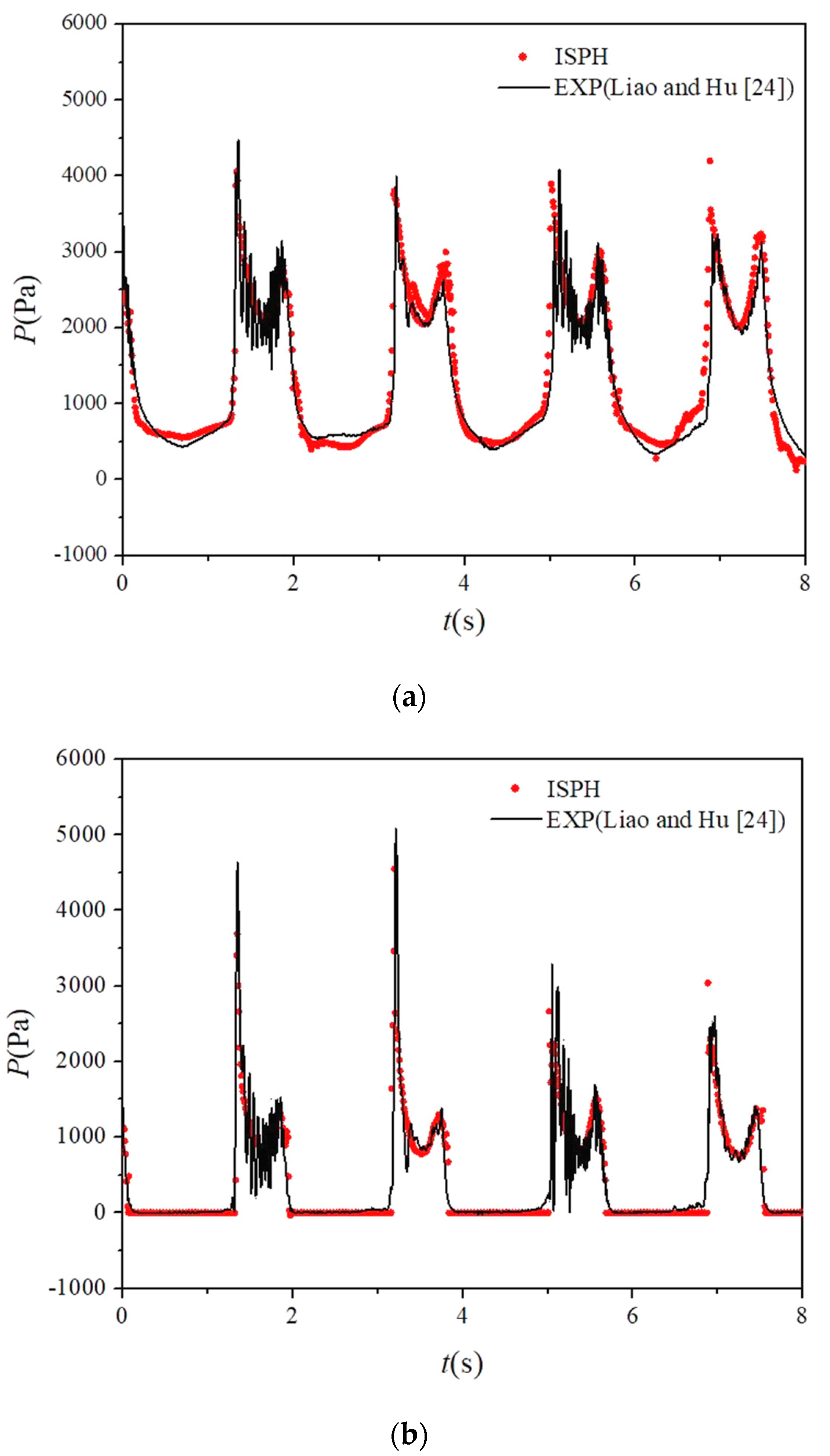
3.1. Sloshing Tank Simulation and Validation
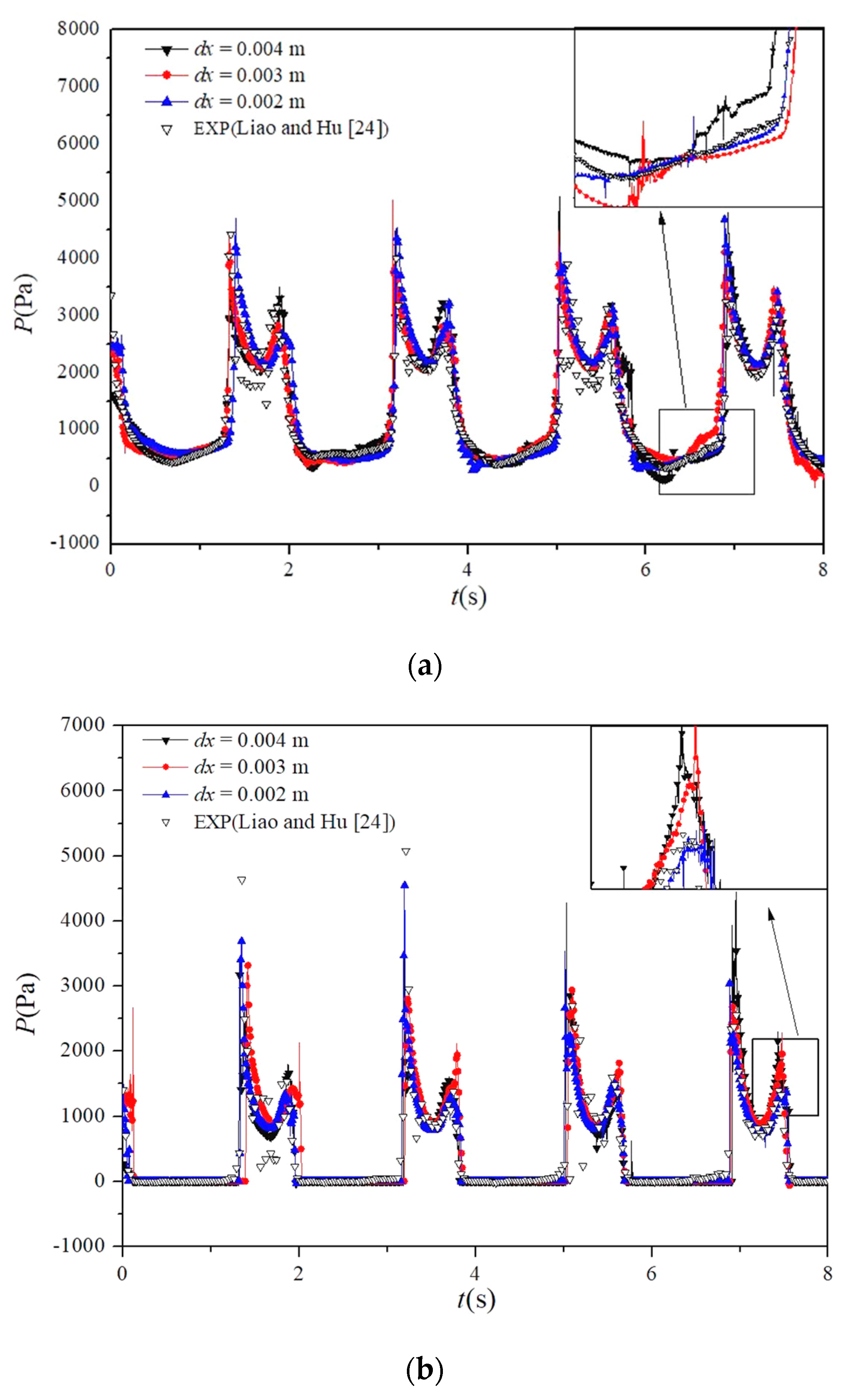
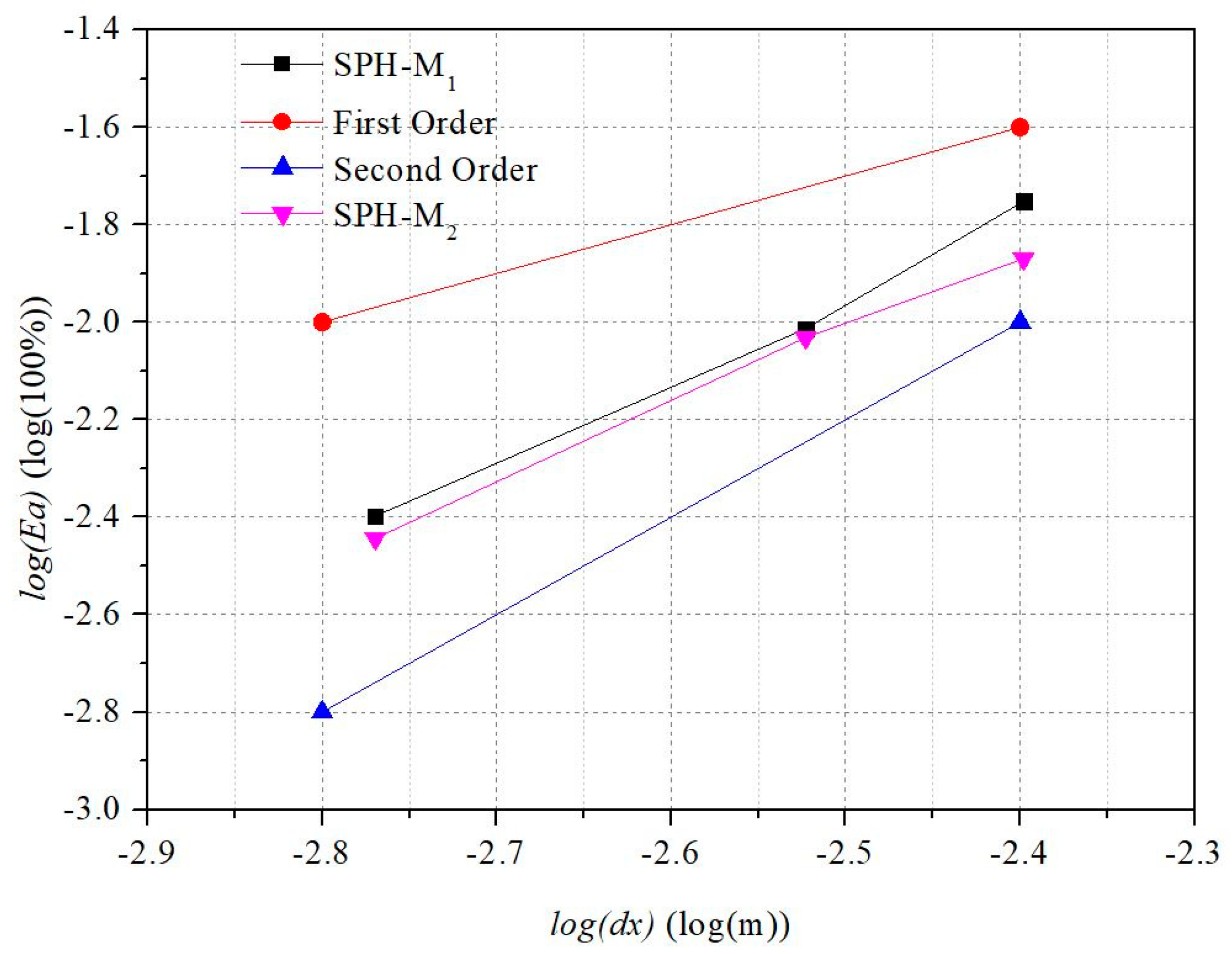
3.2. Convergence Analysis of ISPH Model
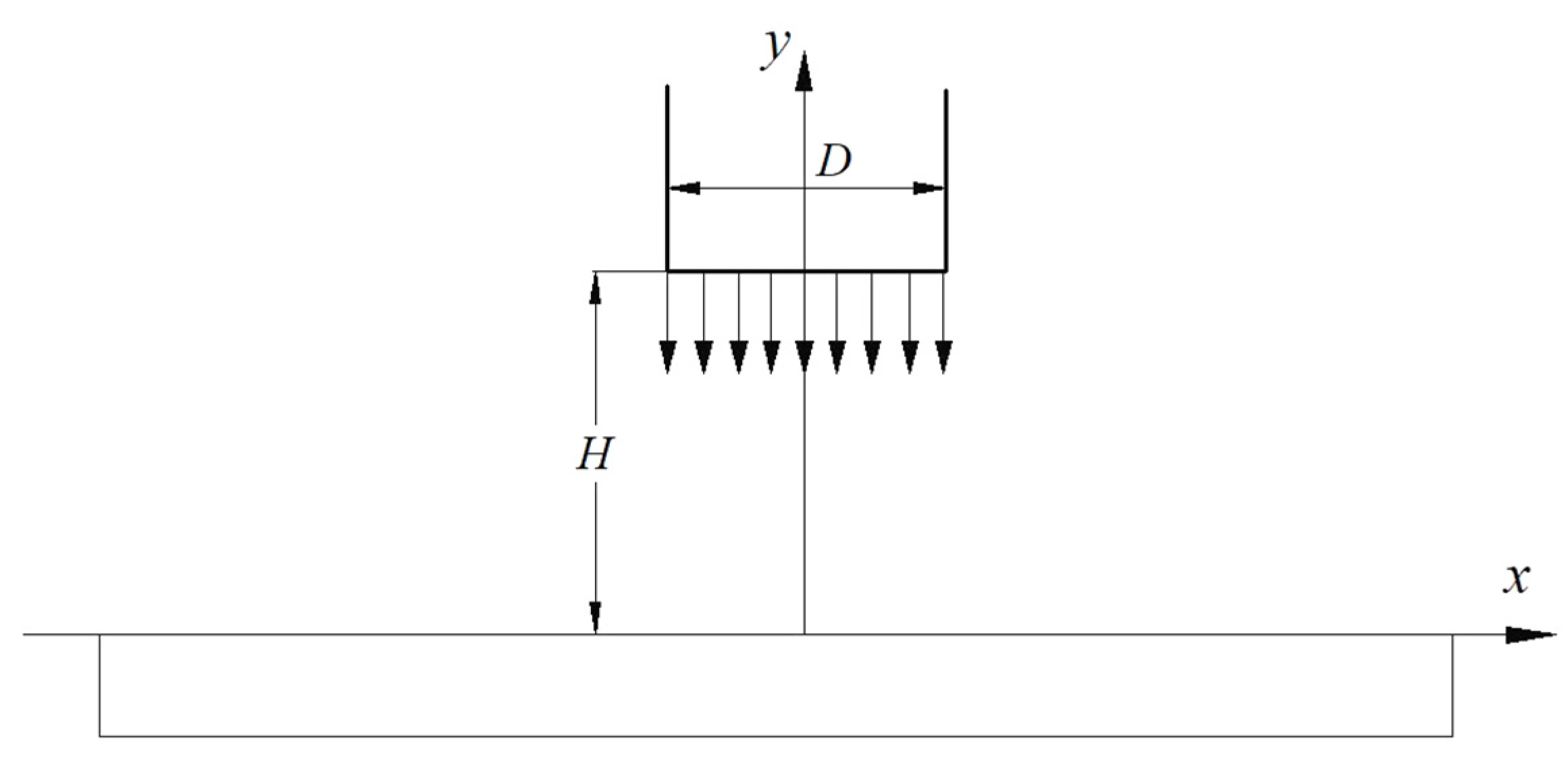
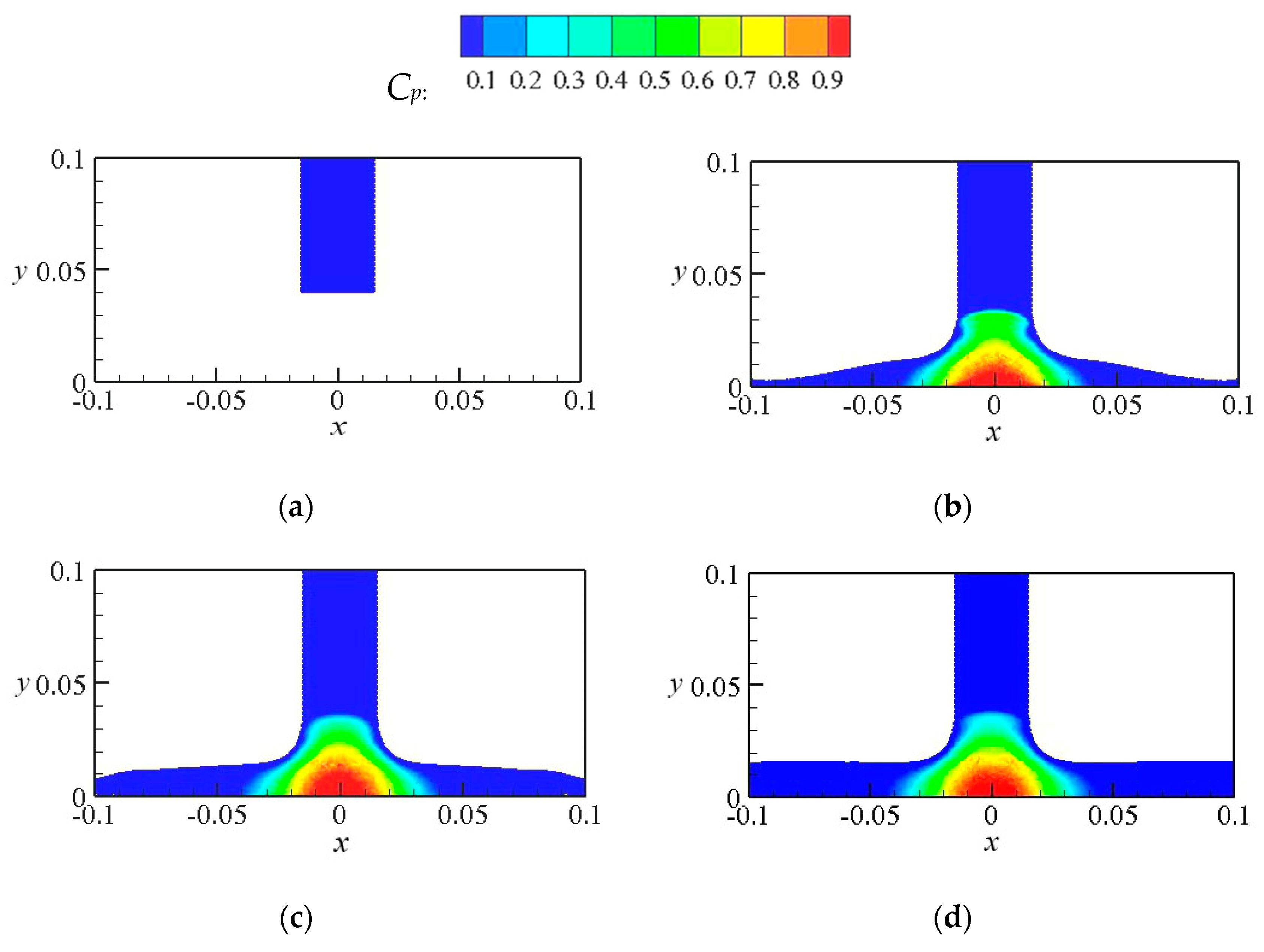
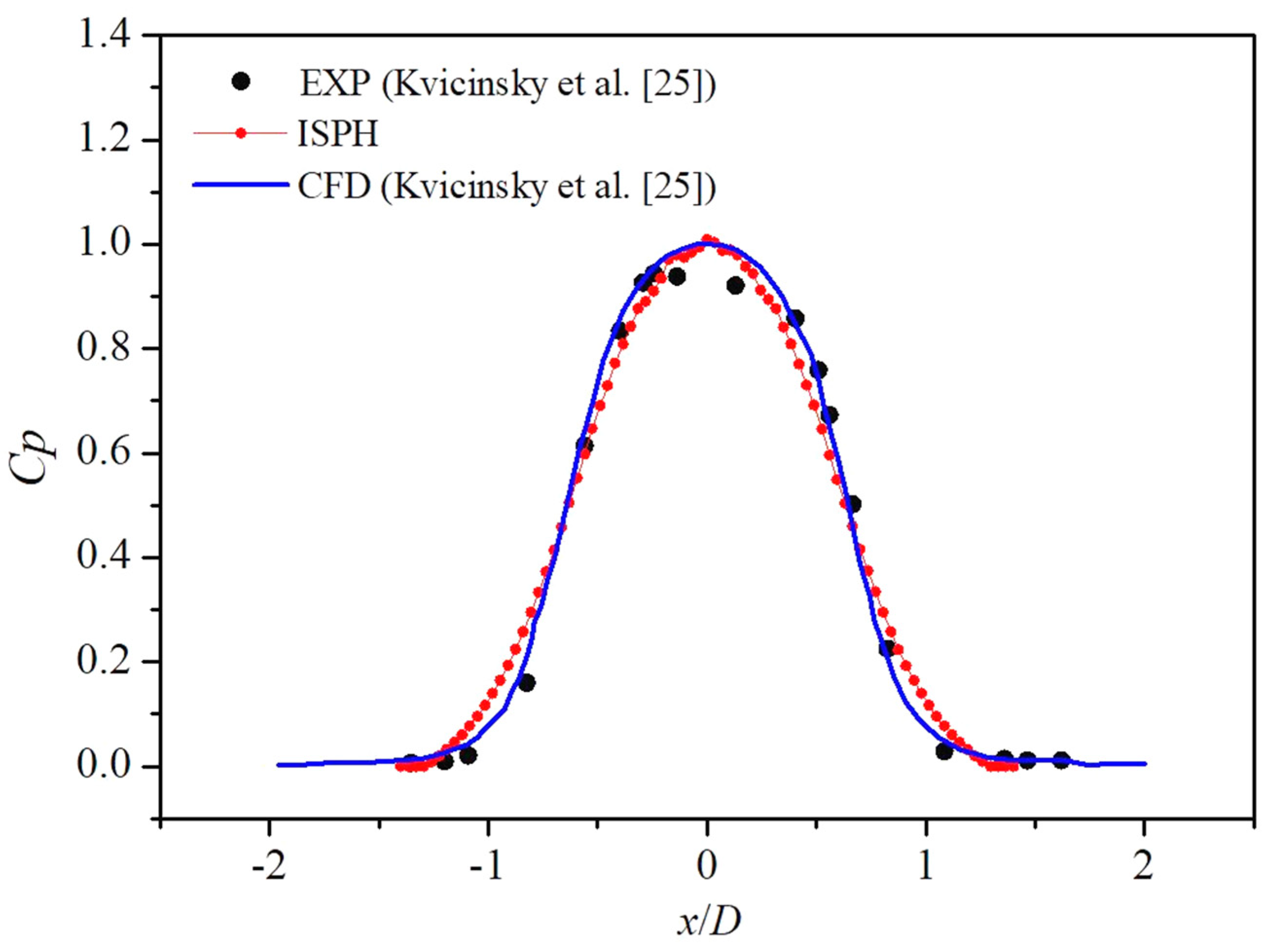
3.3. Numerical Validation of the Water Jet Model
3.4. Validation of Injected Water Jet Flow Model
4. Results and Analyses
4.1. Sloshing Behaviors with Water Jet
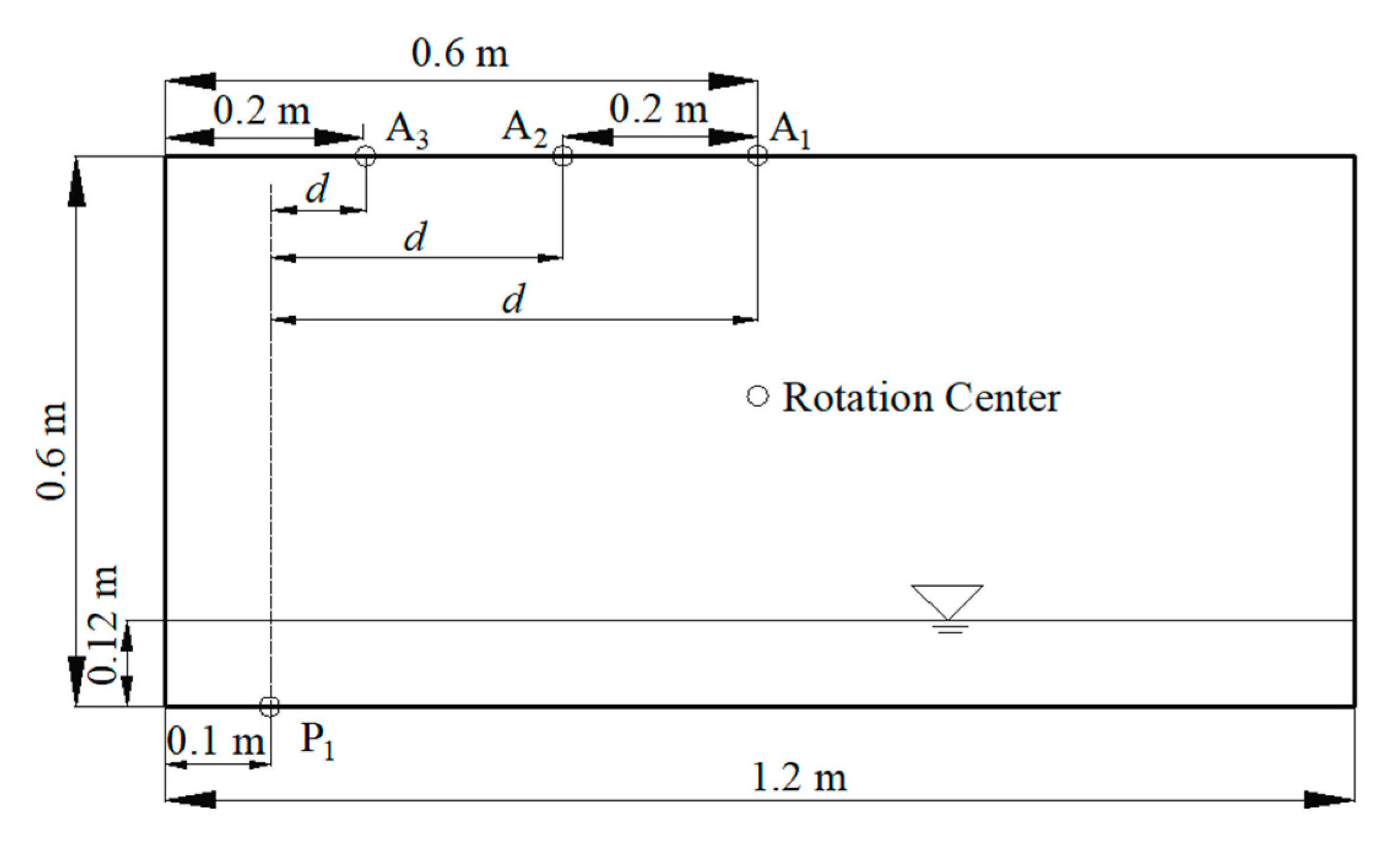
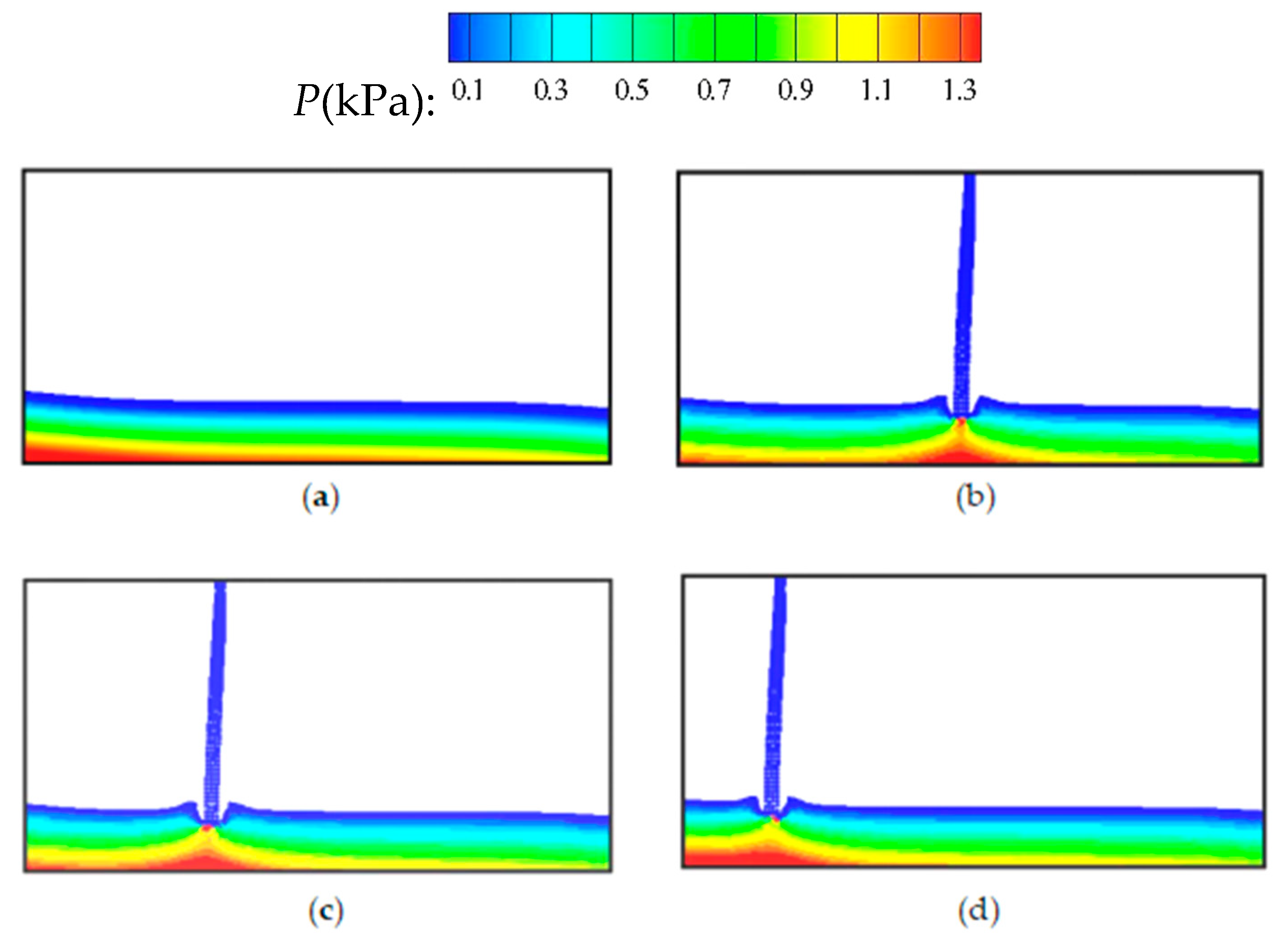
4.2. The Effects of the Water Jet Flow Position
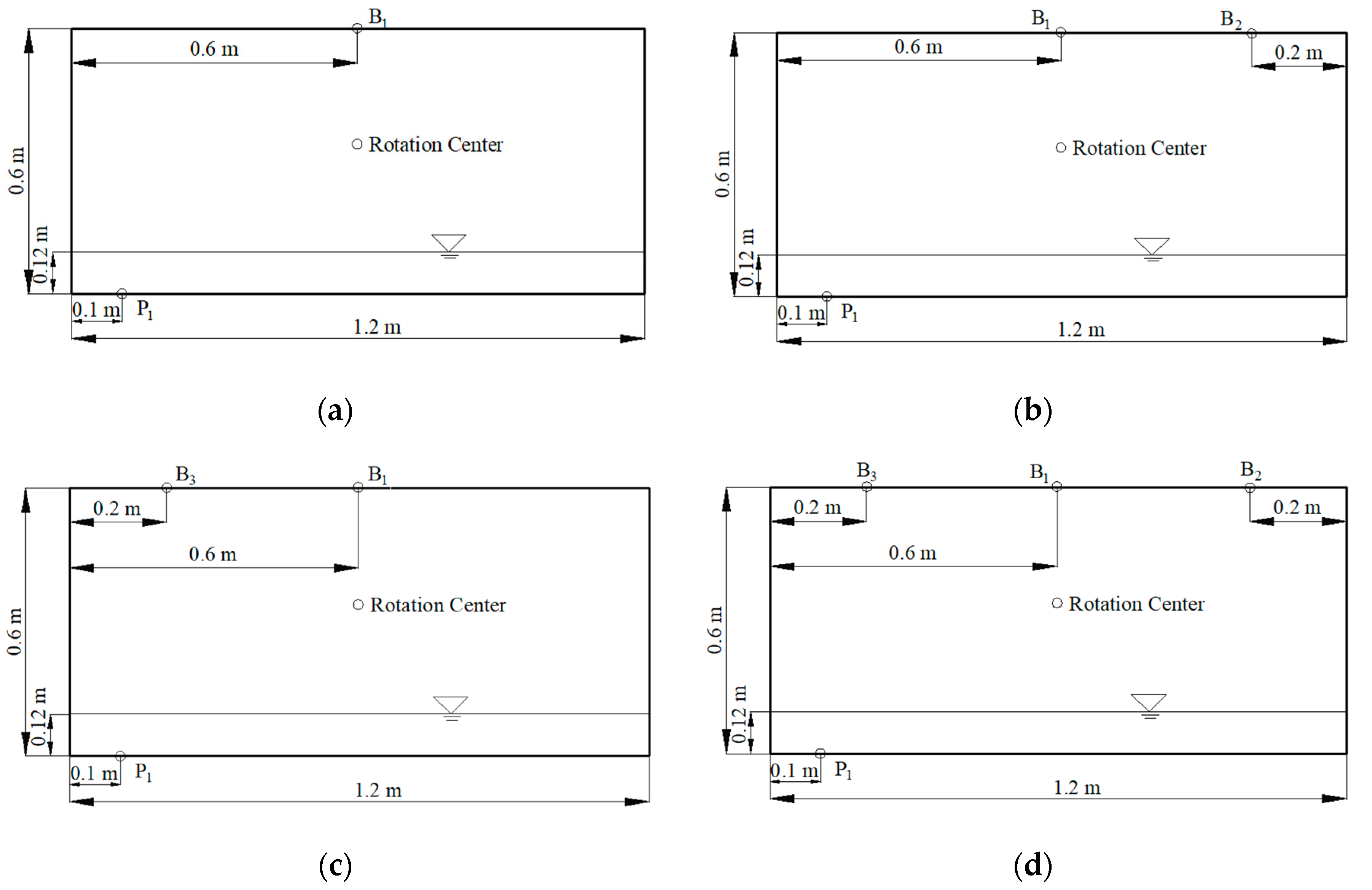
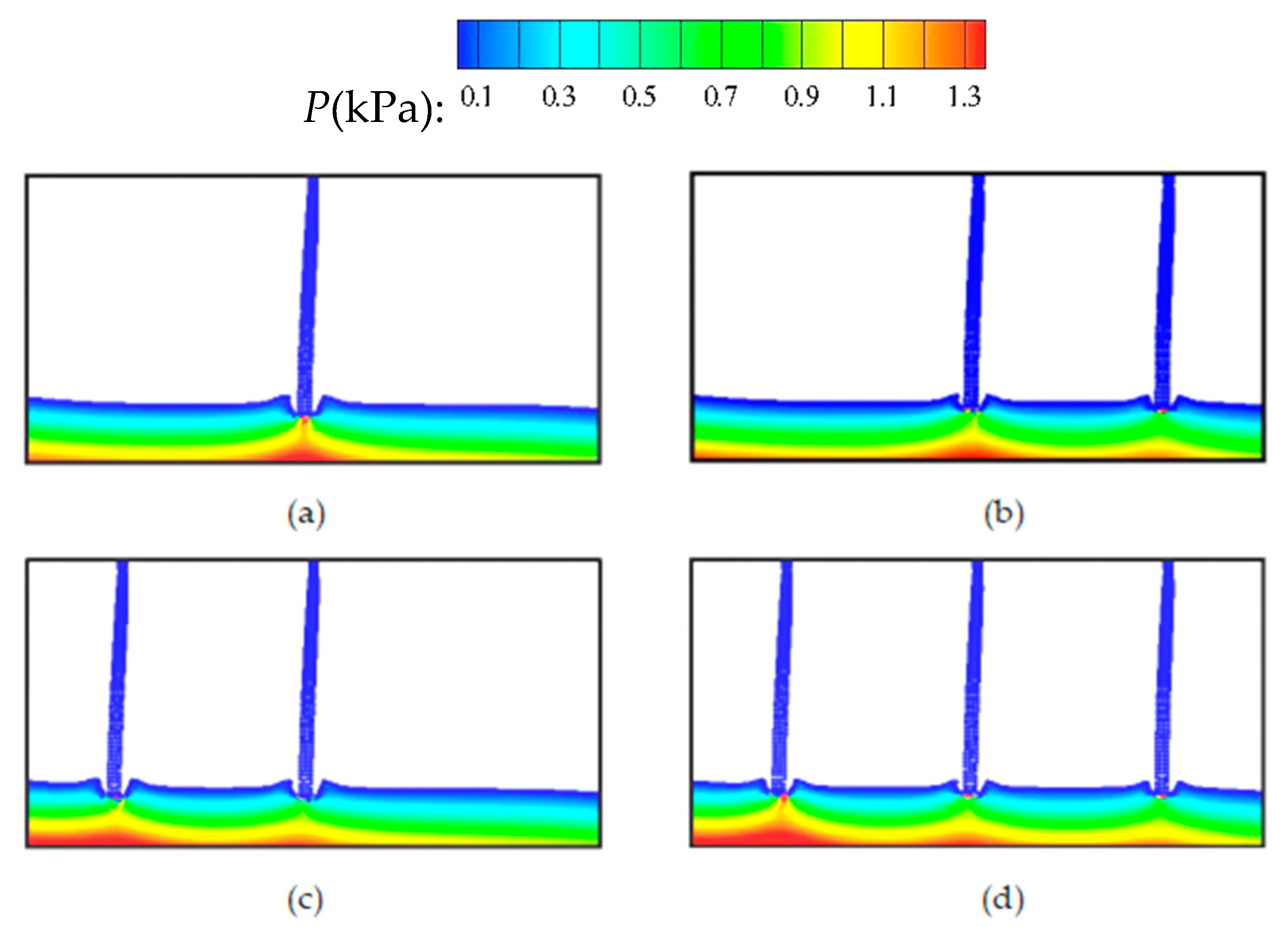
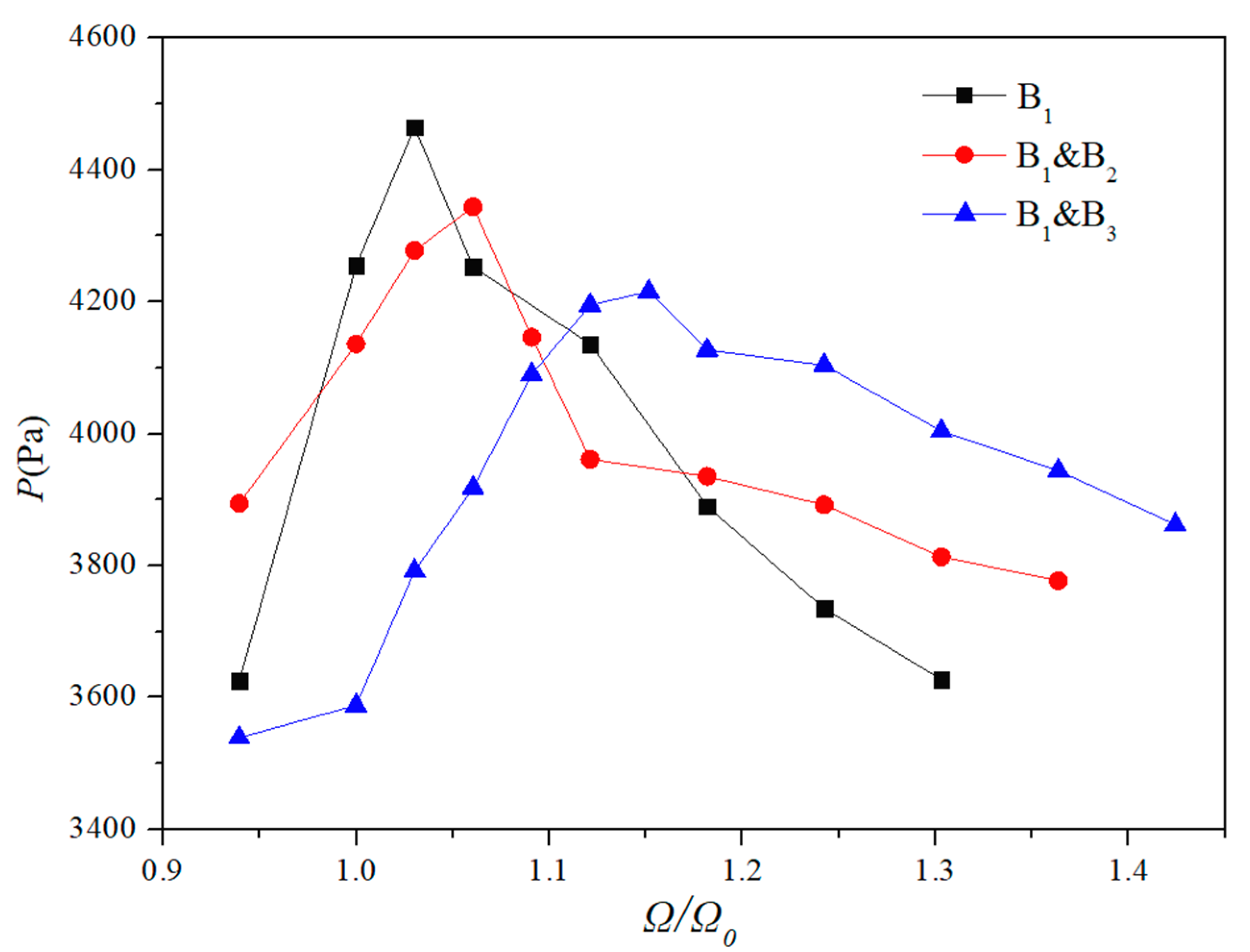
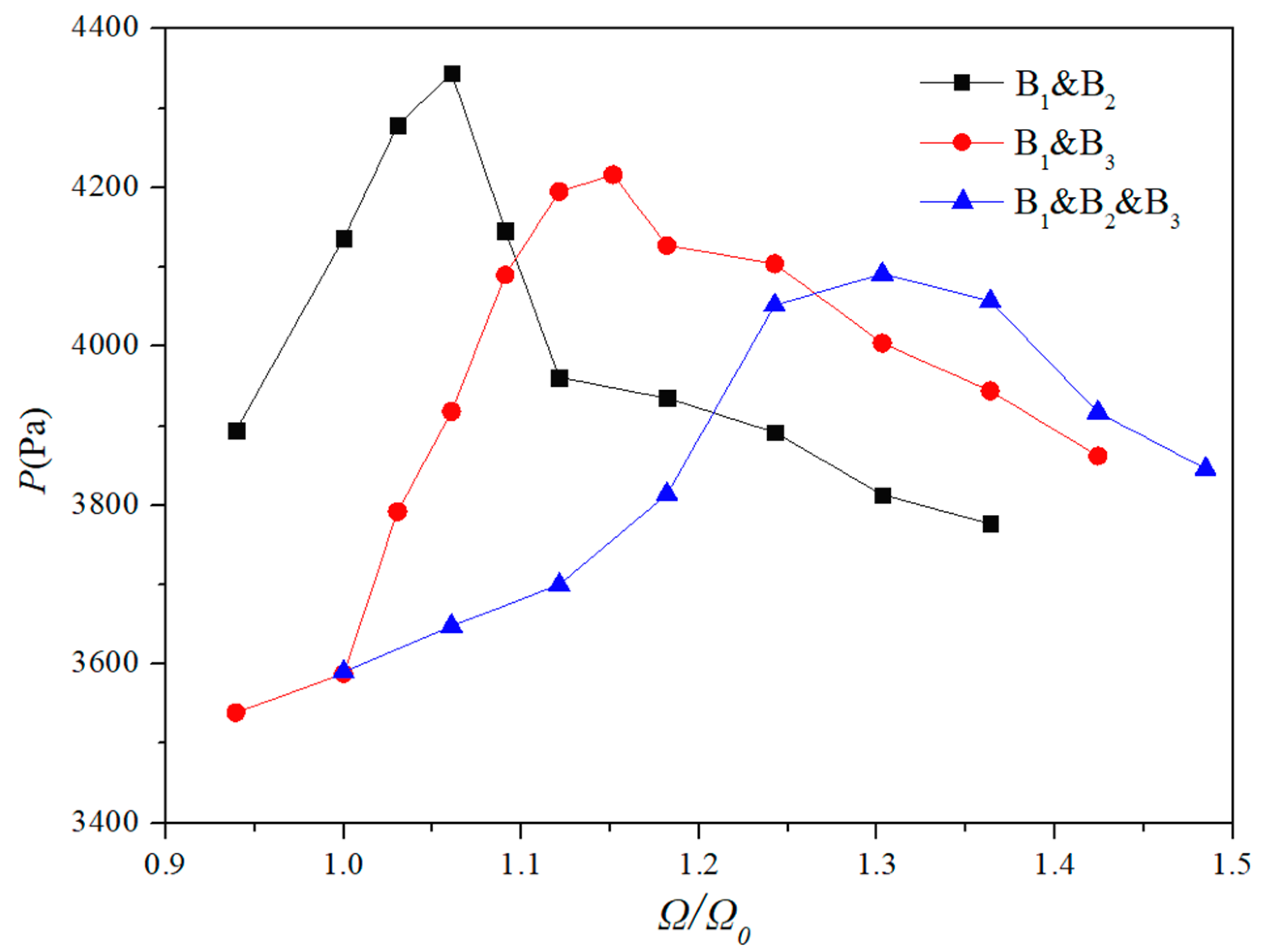
4.3. The Effects of the Water Jet Flow Number
5. Conclusions
- (1)
- The ISPH computations are based on a 2D model. According to previous experimental research, it seems there is not much difference between the 2D and 3D models, especially in the impact pressure and water surface;
- (2)
- The compressibility of entrapped air also has effects on the violent sloshing process, and the maximum Mach number of all the particles in the violent sloshing process was smaller than 1%, which proves the ISPH model can be used;
- (3)
- In the simulations of coastal and ocean engineering problems, the SPH method is mainly used for the impulsive impact on breaking waves, and the longer simulations are often carried out by traditional CFD methods;
- (4)
- The presence of turbulence would produce fully three-dimensional flow structures in the breaking region at the tip of the wave crest [26]. However, this study focused on the macro liquid impact pressure on the tank walls and the general free surface deformation. Hence, a 2D model could also provide a reasonable simulation.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ibrahim, R.A. Liquid Sloshing Dynamics: Theory and Applications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Faltinsen, O.M. A nonlinear theory of sloshing in rectangular tanks. J. Ship Res. 1974, 18, 224–241. [Google Scholar]
- Faltinsen, O.M. A numerical nonlinear method of sloshing in tank with two-dimensional flow. J. Ship Res. 1978, 22, 193–202. [Google Scholar]
- Faltinsen, O.M. Multidimensional modal analysis of nonlinear sloshing in a rectangular tank with finite water depth. J. Fluid Mech. 2000, 407, 201–234. [Google Scholar] [CrossRef]
- Akyildiz, H.; Ünal, E. Experimental investigation of pressure distribution on a rectangular tank due to the liquid sloshing. Ocean Eng. 2005, 32, 1503–1516. [Google Scholar] [CrossRef]
- Sames, P.C.; Marcouly, D.; Schellin, E.T. Sloshing in rectangular and cylindrical tanks. J. Ship Res. 2002, 46, 186–200. [Google Scholar]
- Wu, G.X.; Ma, Q.W.; Taylor, R.E. Numerical simulation of sloshing waves in a 3d tank based on a finite element method. Appl. Ocean Res. 1998, 20, 337–355. [Google Scholar] [CrossRef]
- Liu, M.B.; Liu, G.R. Smoothed particle hydrodynamics (SPH): An overview and recent developments. Arch. Comput. Methods Eng. 2010, 17, 25–76. [Google Scholar] [CrossRef]
- Delorme, L.; Colagrossi, A.; Souto-Iglesias, A.; Zamora-Rodriguez, R.; Botia-Vera, E. A set of canonical problems in sloshing, Part I: Pressure field in forced roll-comparison between experimental results and SPH. Ocean Eng. 2009, 36, 168–178. [Google Scholar] [CrossRef]
- Gotoh, H.; Khayyer, A.; Ikari, H.; Arikawa, T.; Shimosako, K. On enhancement of Incompressible SPH method for simulation of violent sloshing flows. Appl. Ocean Res. 2014, 46, 104–115. [Google Scholar] [CrossRef]
- Zheng, X.; You, Y.; Ma, Q.W.; Khayyer, A.; Shao, S.D. A Comparative Study on Violent Sloshing with Complex Baffles Using the ISPH Method. Appl. Sci. 2018, 8, 904. [Google Scholar] [CrossRef]
- Khayyer, A.; Gotoh, H.; Shao, S.D. Enhanced predictions of wave impact pressure by improved incompressible SPH methods. Appl. Ocean Res. 2009, 31, 111–131. [Google Scholar] [CrossRef]
- Zheng, X.; Ma, Q.W.; Duan, W.Y. Comparative study of different SPH schemes in simulating violent water wave impact flows. China Ocean Eng. 2014, 28, 791–806. [Google Scholar] [CrossRef]
- Hatton, A.P.; Leech, C.M.; Osborne, M.J. Computer simulation of the trajectories of large water jets. Int. J. Heat Fluid Flow 1985, 6, 137–141. [Google Scholar] [CrossRef]
- Hatton, A.P.; Osborne, M.J. The trajectories of large fire fighting jets. Int. J. Heat Fluid Flow 1979, 1, 37–41. [Google Scholar] [CrossRef]
- Fletcher, D.F.; McCaughey, M.; Hall, R.W. Numerical simulation of a laminar jet flow: A comparison of three CFD models. Comput. Phys. Commun. 1993, 78, 113–120. [Google Scholar] [CrossRef]
- Aristodemo, F.; Marrone, S.; Federico, I. SPH modeling of plane jets into water bodies through an inflow/outflow algorithm. Ocean Eng. 2015, 105, 160–175. [Google Scholar] [CrossRef]
- Andreopoulos, J.; Praturi, A.; Rodi, W. Experiments on vertical plane buoyant jets in shallow water. J. Fluid Mech. 1986, 168, 305–336. [Google Scholar] [CrossRef]
- Monaghan, J.J.; Lattanzio, J.C. A refined particle method for astrophysical problems. Astron. Astrophys. 1985, 149, 135–143. [Google Scholar]
- Shao, S.D.; Lo, E.Y.M. Incompressible SPH method for simulating newtonian and non-newtonian flows with a free surface. Adv. Water Resour. 2003, 26, 787–800. [Google Scholar] [CrossRef]
- Khayyer, A.; Gotoh, H. Enhancement of stability and accuracy of the Moving Particle Semi-Implicit Method. J. Comput. Phys. 2011, 230, 3093–3118. [Google Scholar] [CrossRef]
- Khayyer, A.; Gotoh, H. A Multiphase Compressible—Incompressible Particle Method for Water Slamming; International Society of Offshore and Polar Engineers: Kona, HI, USA, 2015. [Google Scholar]
- Zheng, X.; Ma, Q.W.; Duan, W.Y. Incompressible SPH method based on Rankine source solution for violent water wave simulation. J. Comput. Phys. 2014, 276, 291–314. [Google Scholar] [CrossRef]
- Liao, K.P.; Hu, C.H. A coupled FDM-FEM method for free surface flow interaction with thin elastic plate. J. Mar. Sci. Technol. 2013, 18, 1–11. [Google Scholar] [CrossRef]
- Kvicinsky, S.; Longatte, F.; Kueny, J.L.; Avellan, F. Free surface flows: Experimental validation of volume of fluid method in the plane wall case. In Proceedings of the 3rd ASME/JSME Conference, San Francisco, CA, USA, 18–23 July 1999. [Google Scholar]
- Alberello, A.; Pakodzi, C.; Nelli, F.; Bitner-Gregersen, E.M.; Toffoli, A. Three dimensional velocity field underneath a breaking rogue wave. In Proceedings of the 36th International Conference on Ocean, Offshore and Arctic Engineering (ASME 2017), Trondheim, Norway, 25–30 June 2017. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Particle Size (m) | Ea (M1) | Ea (M2) |
|---|---|---|
| 0.004 | 1.77% | 1.35% |
| 0.003 | 0.97% | 0.93% |
| 0.002 | 0.40% | 0.36% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, H.; You, Y.; Hu, Z.; Zheng, X.; Ma, Q. Comparative Study on Violent Sloshing with Water Jet Flows by Using the ISPH Method. Water 2019, 11, 2590. https://doi.org/10.3390/w11122590
Jiang H, You Y, Hu Z, Zheng X, Ma Q. Comparative Study on Violent Sloshing with Water Jet Flows by Using the ISPH Method. Water. 2019; 11(12):2590. https://doi.org/10.3390/w11122590
Chicago/Turabian StyleJiang, Hua, Yi You, Zhenhong Hu, Xing Zheng, and Qingwei Ma. 2019. "Comparative Study on Violent Sloshing with Water Jet Flows by Using the ISPH Method" Water 11, no. 12: 2590. https://doi.org/10.3390/w11122590
APA StyleJiang, H., You, Y., Hu, Z., Zheng, X., & Ma, Q. (2019). Comparative Study on Violent Sloshing with Water Jet Flows by Using the ISPH Method. Water, 11(12), 2590. https://doi.org/10.3390/w11122590