1. Introduction
Water quality monitoring is necessary for effective management of water resources. Periodic sampling and analysis allows one to characterize water and identify changes or trends in water quality over time. For example, pollutants carried by stormwater may include bacteria, nutrients, litter, sediment, oils, and heavy metals [
1]. Through monitoring, information can be gathered to implement specific pollution prevention and remediation programs. Water quality monitoring can provide a check on whether pollution prevention program goals are in compliance with regulations.
Streams receive pollutants from point and nonpoint sources [
2]. Drainage channels, outlets from industrial plants, and wastewater treatment facilities are some of the point sources of inflow. Water pollutant entry from nonpoint sources occurs only after rainfall or emergency overflows during a short period. Nonpoint sources including impervious surfaces such as roadways, rooftops, parking lots, and sidewalks accumulate pollutants and convey them directly to lakes, rivers, and estuaries [
3]. Runoff that heats up on parking lots and roadways can lead to warmer than normal water entering nearby waterways that may cause increase in temperature of surface water. These sources can be monitored with event-controlled water samplers [
4].
In addition to water sampling after a storm event, regular water sampling is also necessary to identify the entry points of pollutants into surface water. For example, nutrient leaching from farm fields or pasture lands to surface water could cause algal blooms. Growth of dense algal blooms causes discoloration in water bodies and can potentially result in damaging fluctuations of dissolved oxygen. Among algal blooms, blue-green algae has the genetic potential to produce toxins [
5] that are harmful to humans and animals, and may cause death to livestock [
6].
Current water quality monitoring in lakes and reservoirs may be done by volunteers with boats [
7]. Volunteers make measurements at predefined locations and collect water samples for laboratory analyses. Water quality parameters measured include turbidity, temperature, algal chlorophyll, dissolved oxygen (DO), electrical conductivity (EC), pH, total phosphorous, nitrogen, and suspended solids. Temperature and pH are important indicators of water quality as they affect rates of biological and chemical activities. Water temperature varies according to the time of year, time of day, weather conditions, water depth, total dissolved solids, shading, and vegetation [
8]. Aquatic organisms require certain pH ranges for survival. Monitoring pH levels in water can eliminate further damage to aquatic life and surrounding environment. The growth of aquatic organisms is greatly reduced if the pH is lower than 4 and greater than 10 in the water. A change in the pH can alter the behavior of other chemicals in the water which might make them toxic [
9]. Because DO is a key indicator of biological activity [
10], it is possible that the sampling mechanism might induce error in this parameter during sampling. Inland chloride ions naturally occur from dissolved minerals in most surface waters, and they come from lawn fertilizers and road salt [
11]. Chloride ions are mobile in the soil and can be taken up by roots and accumulate in leaves resulting in toxicity. High concentration of chloride in organisms can induce osmotic stress and reduce fitness or mortality [
12]. EC is an indicator of the presence of mineral salt and fertilizers, organic matter, and treated wastewater. EC measurements are used to identify existing problems in surface water for water quality monitoring.
Despite the availability of help from volunteers to monitor water quality, some lakes, retired mining zones, or other water bodies surrounded by steep and difficult terrain may not be accessible by boats. In addition, lakes with cyanobacteria (blue-green algae) blooms may cause risks to human while collecting water samples or making water quality measurements. Autonomous underwater vehicles (AUVs) and autonomous surface vehicles (ASVs) have been used for water quality monitoring in recent years [
13,
14]. The major challenge of water quality monitoring with an underwater vehicle is the accurate positioning of the vehicle as the GPS system cannot be used when the vehicle is underwater [
14]. Because of this limitation, the AUVs have to be equipped with additional navigational systems or acoustic localization systems. The ASV can automatically navigate to predefined sampling points and measure pH, DO, EC, turbidity, temperature, sensor depth, water depth, chlorophyll-a concentration, and nitrates [
13]. The disadvantages of automatic sampling with ASVs are the operational difficulties due to swaying from side to side and uncertain engine-control frequencies [
13].
Unlike the above methods, unmanned aerial vehicles (UAVs) can also be used for water quality monitoring. UAVs are commonly used for remote sensing in agriculture for scouting of field crops and livestock monitoring [
15]. Crop yield assessments, crop height monitoring, crop weed mapping, and biomass monitoring are some of the examples for remote sensing with a multispectral camera integrated UAVs [
16,
17,
18,
19]. UAVs can also acquire air quality data with high spatial and temporal resolution [
20]. Recent developments in sensor technology led to the design of compact devices that can measure a variety of air pollutants [
21]. The use of UAVs is not limited with remote sensing or air quality monitoring. UAVs are also used for aerial spraying of herbicides or pesticides, aerial sensing of sound and identifying changes in land structure for city planning [
22,
23]. Emergency applications of UAVs include but are not limited to blood delivery, ambulances for cardiac arrest, and disaster relief operations [
24,
25,
26]. Distinct advantages that UAVs provide include the ability to rapidly and remotely travel to locations that are difficult to access and the efficient execution of tasks with relatively reduced costs and time. For example, aerial images that are taken remotely with a UAV can help visualize disturbances in water and provide enhanced spatial water quality monitoring data [
27,
28]. Aerial surveys with a high-resolution camera attached to a UAV may also be used to monitor topographic changes in watersheds [
29]. Information gathered from these surveys can provide the specific coordinates of contaminations, which can be included in water quality monitoring plan for further sampling. For example, a UAV-assisted in situ water quality measurement system was developed and tested over an agricultural pond [
30]. The developed system can measure electrical conductivity, pH, dissolved oxygen, and the temperature of water autonomously [
30]. In addition to water quality monitoring, a water sampling UAV with water collection devices can be used to collect water from pre-determined locations [
31]. Ore et al. (2015) developed a multirotor UAV equipped with a water pump, sampling tube, and vial to collect three 20 mL samples per flight [
31]. The use of a pump would require additional components and extend the time for water collection. A UAV with a rapid water-capturing mechanism can reduce the sample collection time.
The objective of this research was to evaluate the functions of a custom-made UAV-assisted autonomous water sampling system with laboratory and field tests.
2. Materials and Methods
2.1. Multirotor UAV
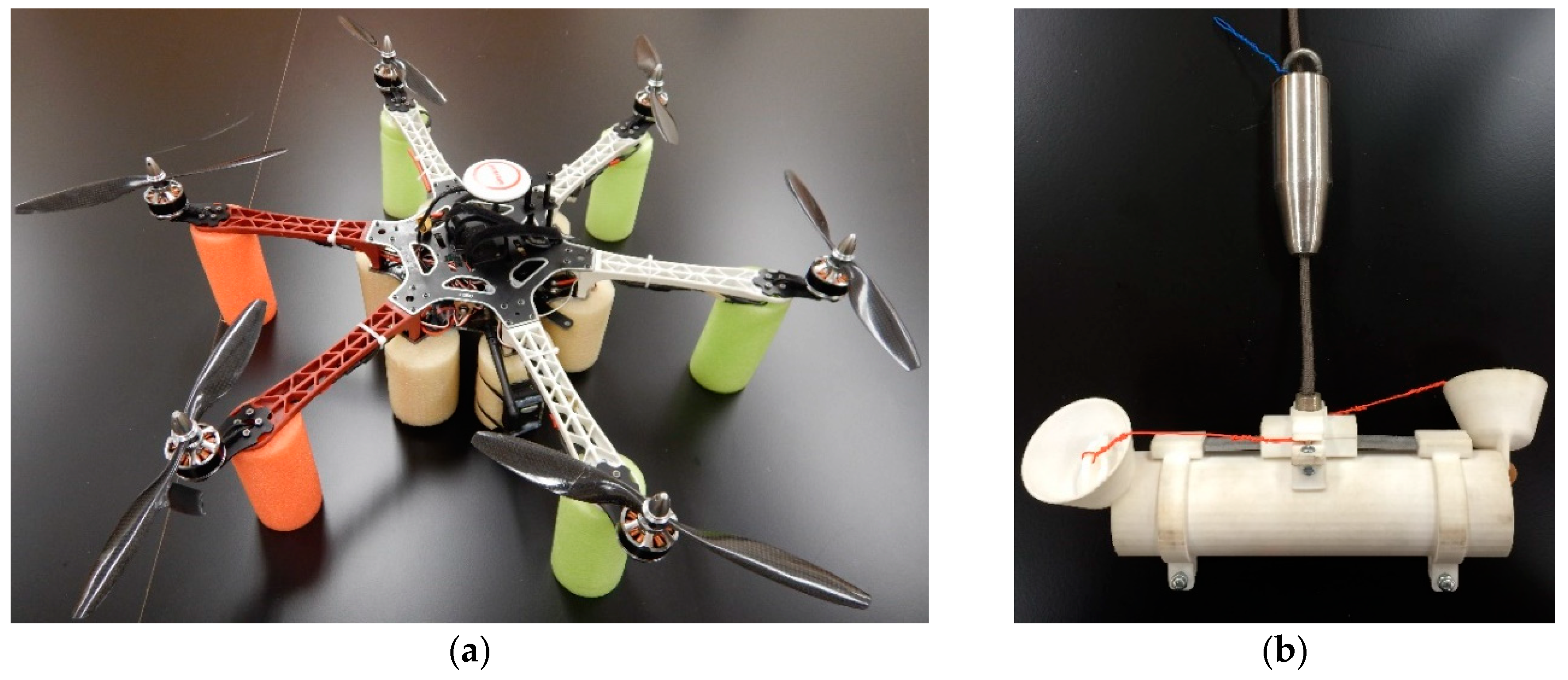
A custom-built multirotor UAV was used for this research. The manual control of the UAV was accomplished with a radio controller (RC) (Turnigy 9X, Hextronik, Chengdu, China). Autonomous control of the UAV was accomplished with a flight controller. The main components of the UAV were a frame, motors, propellers, electronic speed controllers, a flight controller (Pixhawk, 3DR, Robotics, Berkeley, CA, USA), a GPS receiver (Ublox, 3DR, Berkeley, CA, USA), a telemetry radio transmitter (3DR radio, 3DR, 3DR, Berkeley, CA, USA), and a power supply (Venom, Rathdrum, ID, USA). The total hull length of the UAV was 566 mm (
Figure 1). The payload mounted at the bottom of the frame contained a servo motor, fabricated water capturing mechanism (FWCM), a messenger to trigger FWCM, and floatation attachments. Electronic parts were chosen depending on the desired payload, flight time, and compatibility [
32]. The total payload capacity of a UAV depends on thrust it can produce. Therefore, water sampling capacity of the system was limited. Indoor experiments were conducted to determine flight duration of the UAV with water sampler. Specifications of UAV components used in this study are shown in
Table 1.
A ground control station contained a computer which communicated with the UAV via a telemetry radio transmitter. The ground station gathered information about flight conditions including battery level, altitude, location, flight mode situation, and GPS connection status during a flight mission. All electronic circuits in the system were waterproofed using a corrosion prevention spray (90102 Anti corrosion, Corrosion Technologies, Dallas, TX, USA) to prevent water damage to system components.
2.2. Flight Performance Test Station
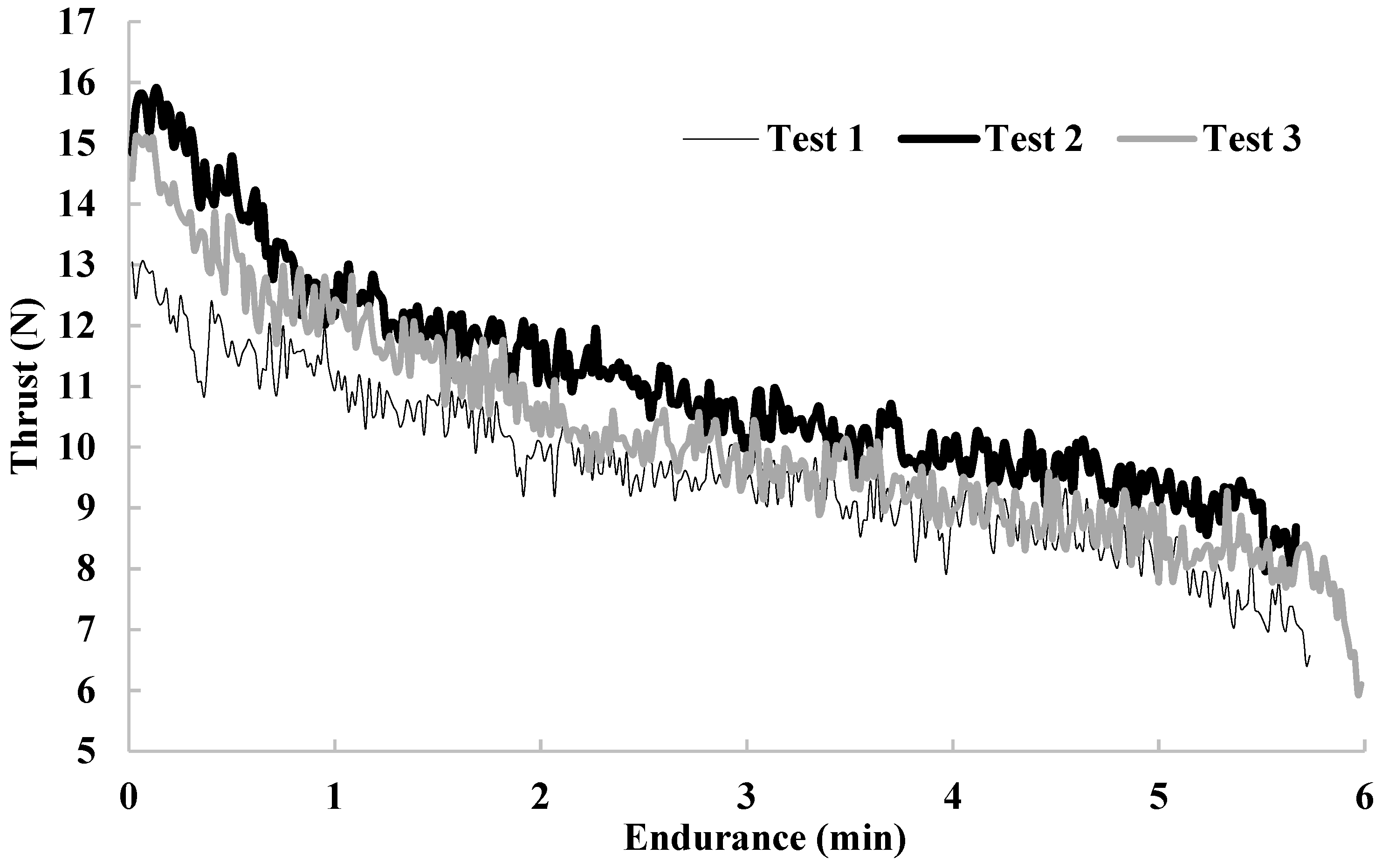
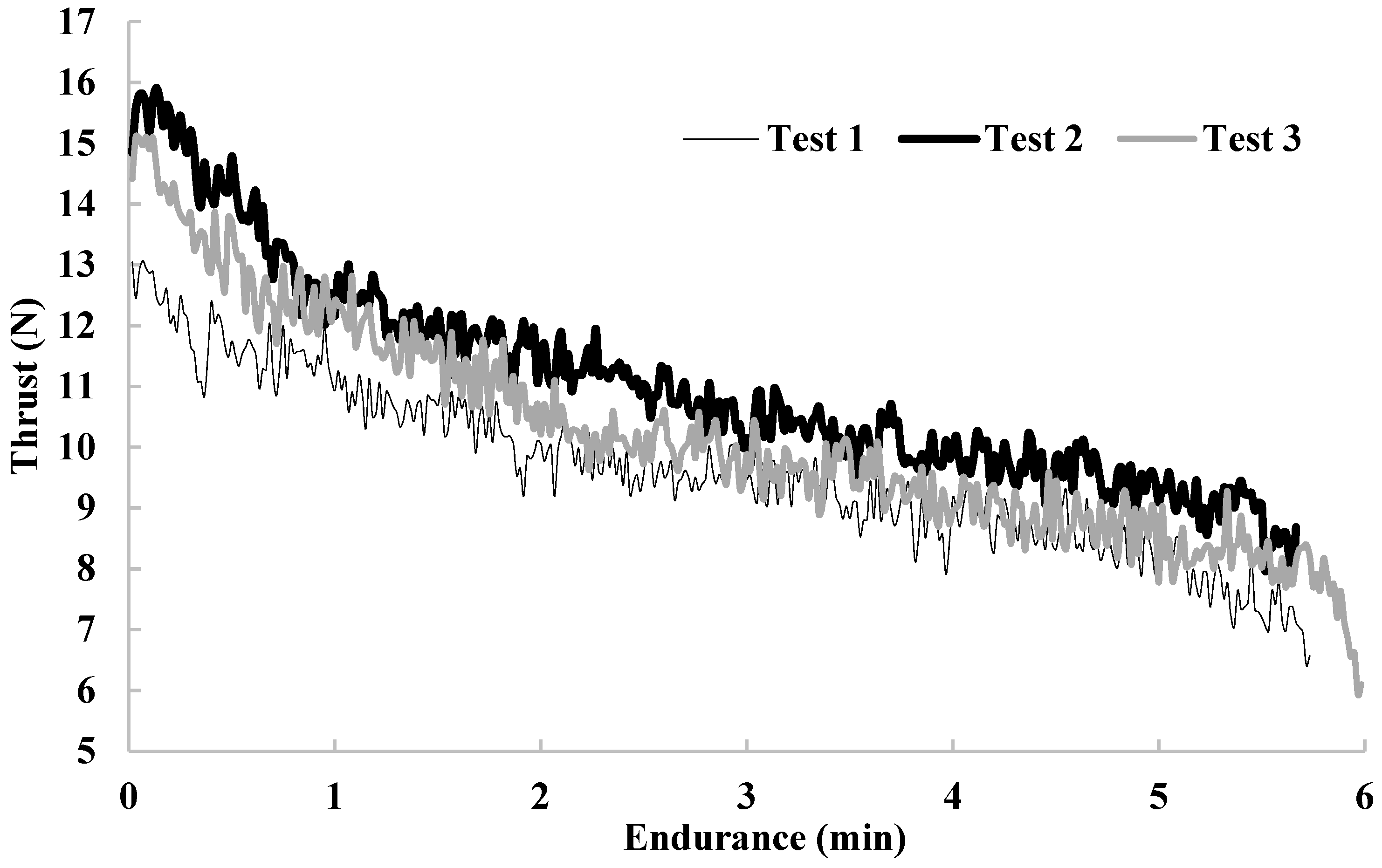
The endurance and total payload of the UAV were determined with indoor tests. A flight performance test station was developed to determine how long the UAV can fly while carrying a certain payload (
Figure 2). The flight performance test station consisted of a wooden structure, a load cell (MR01, Honeywell, Morris Plains, NJ, USA), a data acquisition board (NI-USB-6009, National Instruments, Austin, TX, USA), and a bridge sensor (DMD 465, Omega Engineering, Norwalk, CT, USA). The test station was developed to place the UAV in the middle of the wooden columns to provide safe zone during the tests. The data acquisition board was used to transfer thrust measurements to a computer. Once the UAV was placed in the columns, it moved freely on the vertical axis. The load cell placed under the top cover of the station measured the force while the UAV was flying in the upward direction. Load cell was calibrated by converting real-time load values (g) into electrical signals (mV). The dynamic range of the load cell was 5–50 kg with an excitation voltage range of 5–10 V. The bridge sensor was integrated with the load cell for signal conditioning to amplify the full scale output voltage [
33]. A regression equation was developed between the known weights and output voltages. The regression equation in the LabVIEW program then converted the output voltage into corresponding weight while the UAV was exerting force on the load cell in the upward direction.
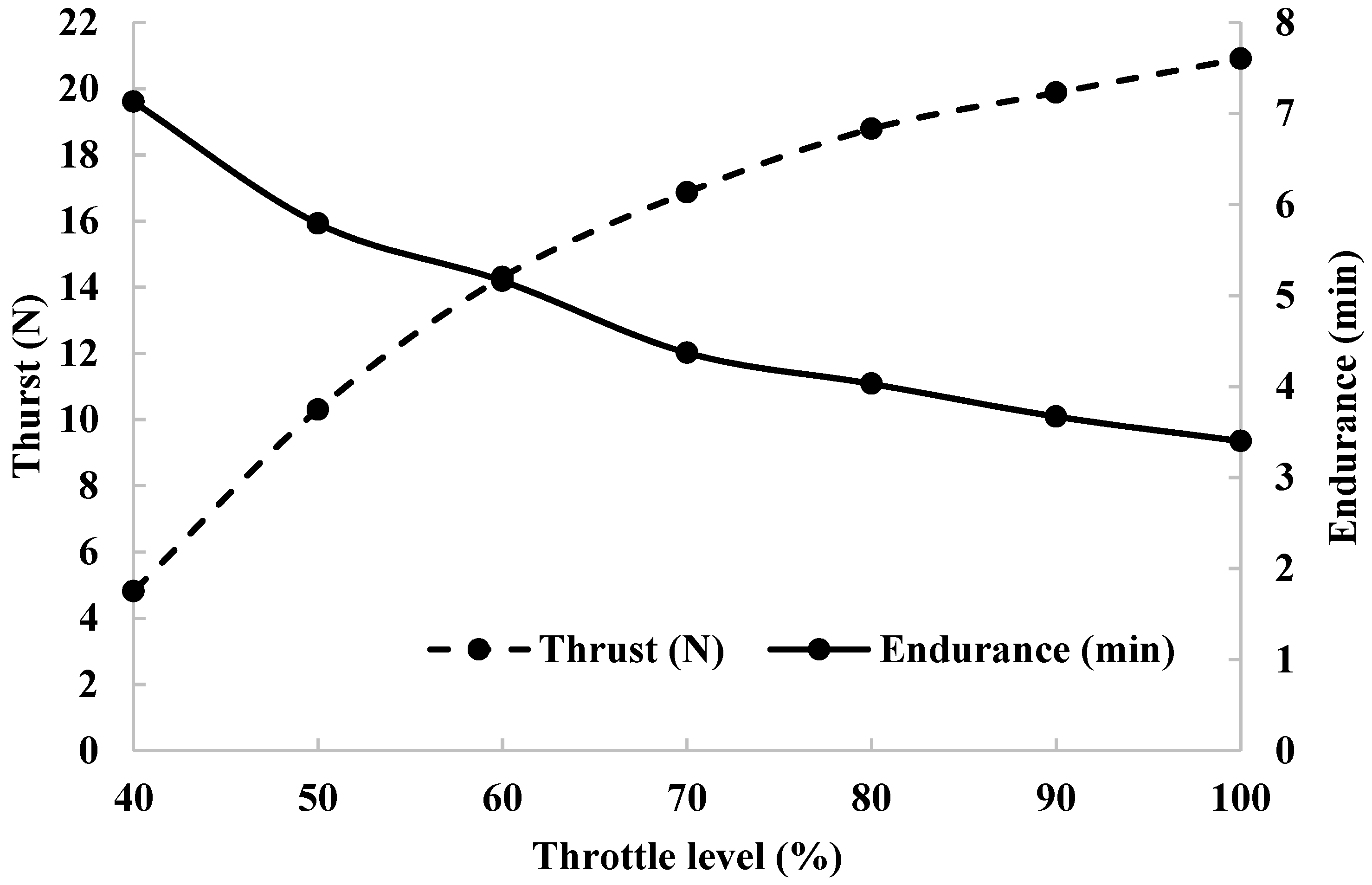
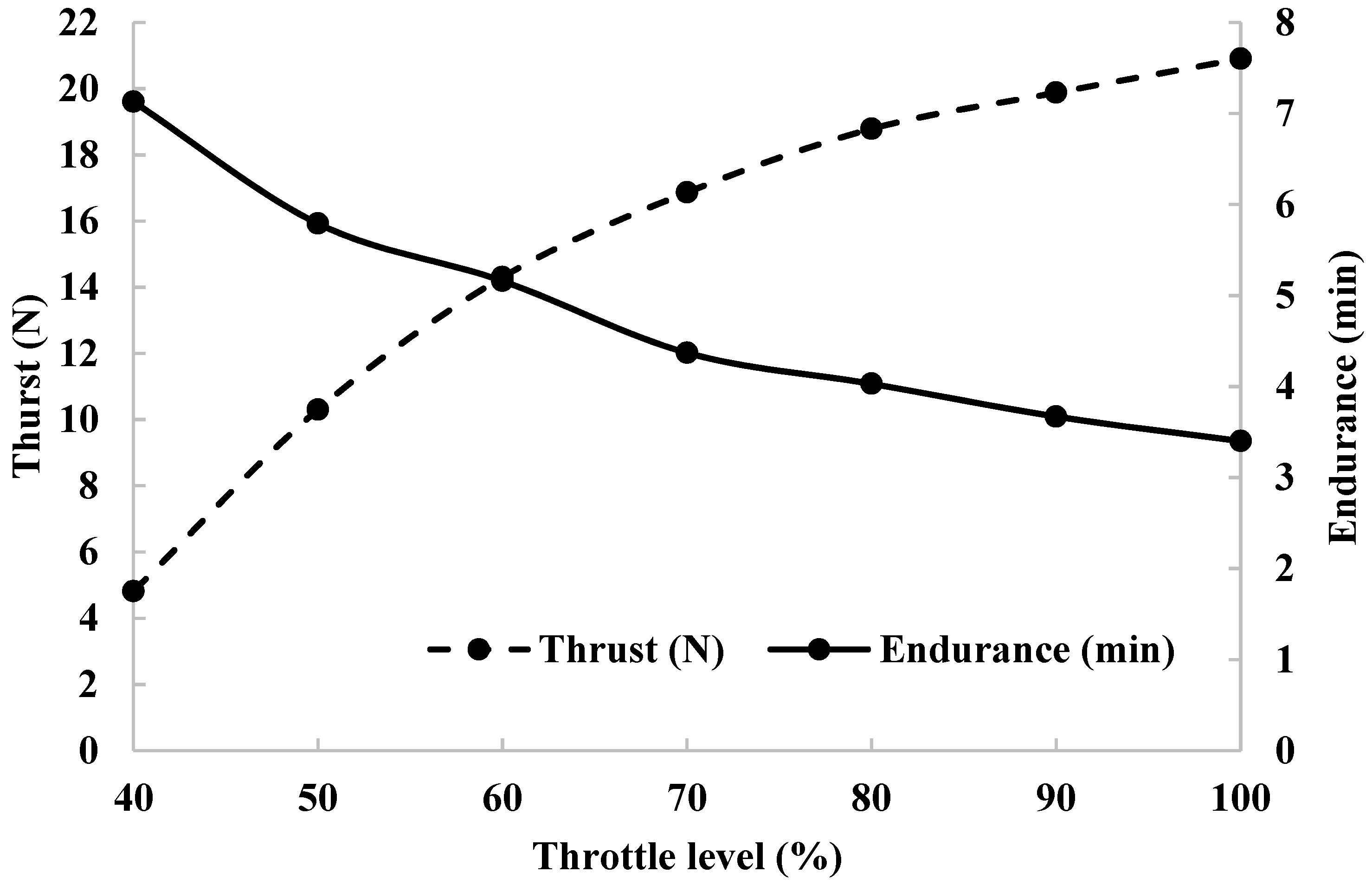
The UAV was operated at different throttle (speed) settings. Varying the throttle level changed the speed of the motors and the amount of vertical force applied on the load cell in the upward direction. The force measurements taken from the load cell were used to determine the thrust that the UAV can produce at a given throttle level. From the thrust measurements, the payload (g) capacity of the UAV was determined. The gross weight of the UAV was determined from the payload and the empty weight of the UAV [
34].
2.3. Fabricated Water Capturing Mechanism
A thief-style water sampler [
35] was designed with SolidWorks
® (Dassault Systèmes Americas Corp., Waltham, MA, USA) and fabricated. A thief sampler is typically an open tube used to sample containerized liquid water [
36]. Designed parts were 3D-printed with a laser printer using Selective Laser Sintering (SLS) technique to fabricate the water capturing mechanism. The volumetric capacity of the sampling equipment was designed to be 130 mL.
Figure 3 shows the FWCM. The FWCM consists of a cylindrical tube, tube covers, a release button, and a polymer plastic string. The length and diameter of the sampling tube were 15.24 and 3.81 cm, respectively. A polymer plastic tether was selected because of its strength and elasticity. This material provided enough tension to pull the covers back when the sampler was set. The plastic string closes the two open ends rapidly once the release button is pressed. The release button is pressed when the messenger (a metal weight) is released. Releasing the messenger and triggering the push button actions were achieved autonomously with the flight controller.
A Pixhawk flight controller was used for the system. The Pixhawk flight controller is capable of acquiring data from various sensors and controlling different devices such as servo actuators [
37]. Servos are commonly used as camera shutters or fixed winged model aircraft controls [
38]. The Mission Planner ground control software enables servo control during an autonomous flight. With the help of the flight controller, the servo can be triggered at any pre-determined location at any desired altitude.
The developed UAV can fly autonomously using its autopilot function and automatically obtain altitude information from its sensors [
39]. Therefore, the water sampler release action was controlled with autopilot commands. A “do-set-servo” command was added to the flight mission at a desired location and altitude. Once the UAV is in hovering pattern over the sampling location, the servo is triggered to release the water sampler into the waterbody to collect a water sample. With the weight of the collected water, the gross weight of the UAV was 2730 g (
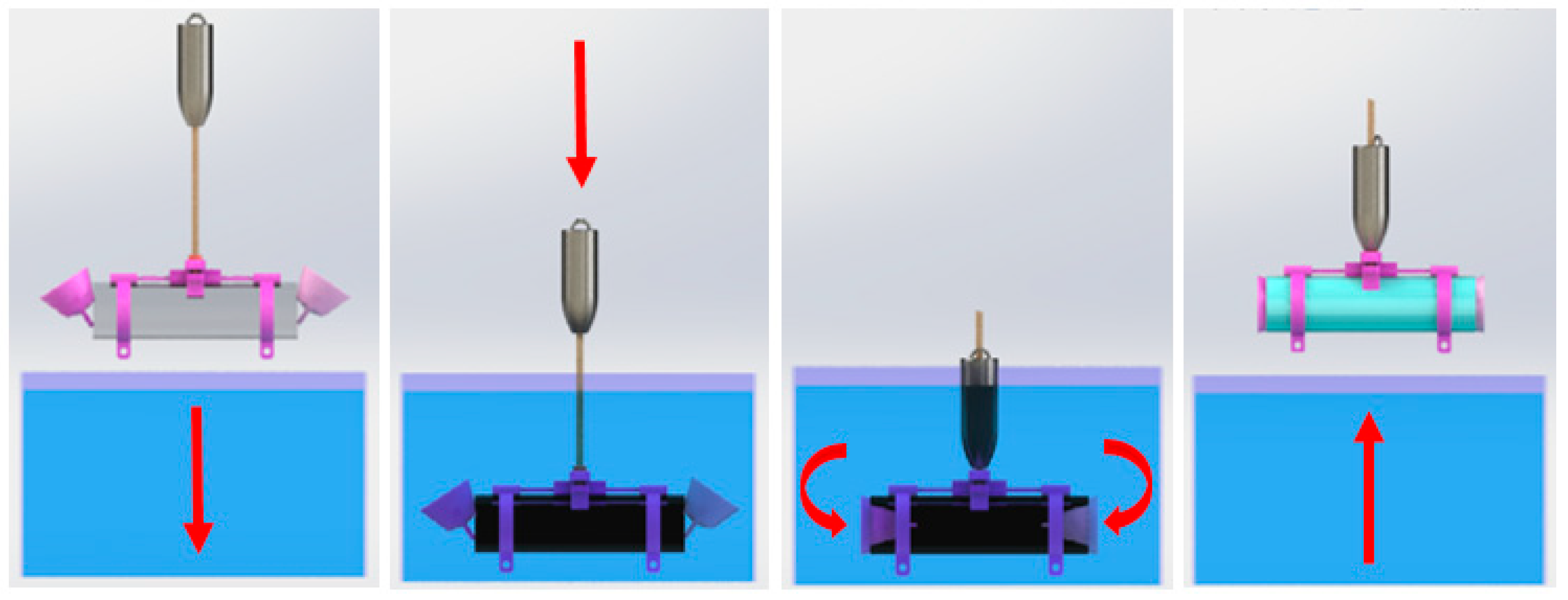
Table 2). The sequential procedure of the release of water sampler and messenger during water capturing is shown in
Figure 4. The sequential water capturing procedure is made of four events. At first, the FWCM is set by opening both end covers and fixing the messenger under the UAV to the servo lock. When the UAV is arrived at the sampling location, the FWCM is dropped into the water as the first event. The second event is the messenger release from the UAV after 4 s of dropping the FWCM. Once the messenger is released, it dives into water and hits the triggering mechanism on the FWCM. The third event is the water capturing by closing the side covers. The two side covers are closed due to the stretched rubber string inside the cartridge. Once the side covers are closed, water is trapped inside the cartridge. The rubber string keeps the two side covers tight and prevents potential leakage. The final event of the sequence is the UAV take off and return to home location. A delay time of 9 s is assigned before messenger release event and before take-off event. A video showing the system operation can be found in Koparan [
40].
2.4. Study Sites
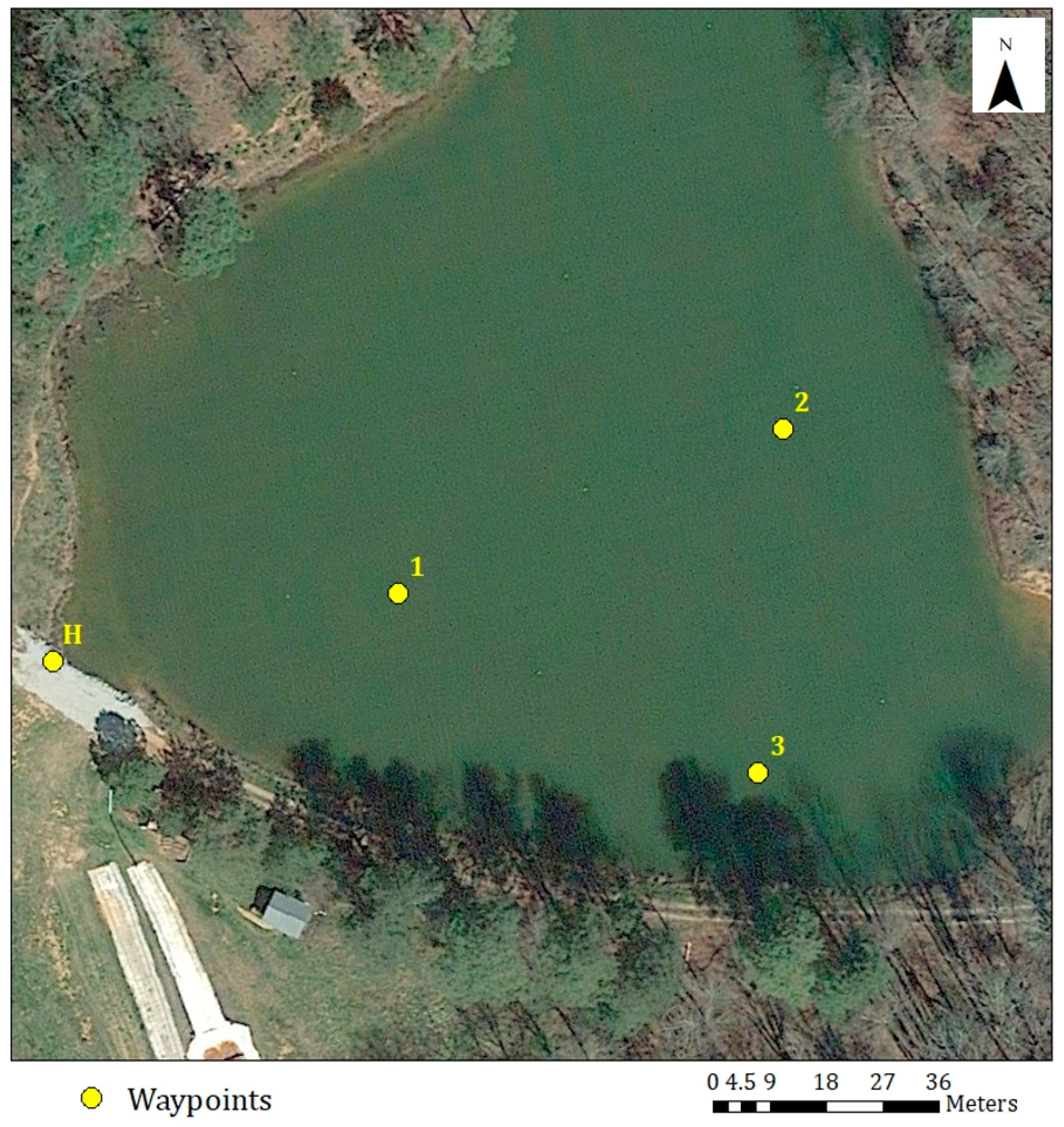
The system was tested for its water sampling performance and autonomous flight quality over LaMaster Pond at Clemson University, Clemson SC. The latitude and longitude of LaMaster Pond are 34.6578544° N and −82.8193253° W, and the elevation of the pond is 216 m (709 ft) above the sea level according to the Clemson USGS quad topographic map [
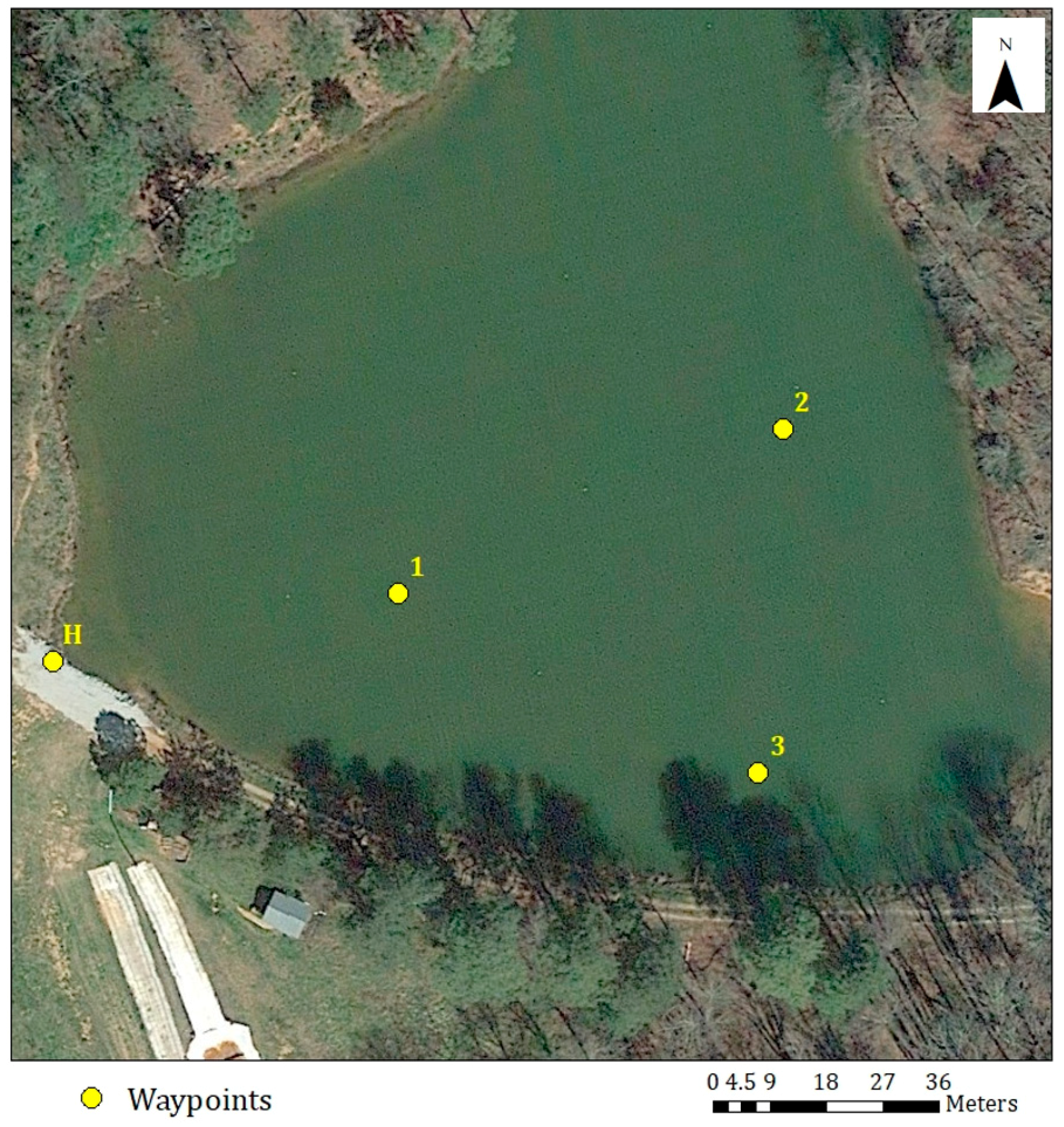
41]. The surface area of the pond was 1.1 ha. Because the UAV system did not have enough endurance capacity to travel every corner of the pond, three locations in the middle of the pond were selected for outdoor experiments as sampling locations. The center of the pond also allowed easy access by boat so traditional manual water sampling could be made to confirm the sampling results from the UAV-assisted water sampling system. The launch location for the autonomous missions is represented with the letter “0”, and sampling locations are represented with numbers as shown in
Figure 5. Water samples were collected within 2 m radius of the sampling points. The distances between launch location and sampling points 1, 2, and 3 were 52 m, 87 m, and 98 m, respectively. The coordinates of Sampling Point 1 were 34.657086° N and −82.819755° W, those of Sampling Point 2 were 34.656881° N and −82.819359° W, and those of Sampling Point 3 were 34.657187° N and −82.819279° W.
2.5. Manual Flights to Determine the UAV Water Sampler Performance
System components were initially tested indoors with the flight performance test station and adjustments were made until the desired flight performance was achieved. The FWCM was also tested to confirm the automatic activation function to be used during an autonomous water sampling mission in an outdoor environment. A 0.6 m3 capacity water tank was used for the initial tests. The depth of water in the tank was 0.7 m. The surface area of the tank was 0.8 m2. Each UAV-assisted sampling attempt was recorded based on their success. Individual water sampling attempts were made with individual manual flights. A total of 20 attempts were made to collect water samples using a radio controller. In order to determine the success rate of the sampler mechanism, the UAV was remotely operated using the “Loiter mode”. Loiter mode allowed for relatively easy flight control over the water tank. The UAV was launched from a location with good GPS reception. The UAV was launched and controlled with the radio controller until the water sampler was inside the water tank. After the water sampler was dropped into the tank at a depth of approximately 0.4 m, the messenger was released by turning a designated switch on the radio controller. After releasing the messenger, the UAV ascended and returned to the launch location. The mission was recorded as a success if the water was captured by the sampler and the amount of water was measured. If the water sampler did not capture any water, the mission was recorded as a failure and the reasons for the failure were recorded.
2.6. Autonomous Flight Missions and Water Sampling Approach
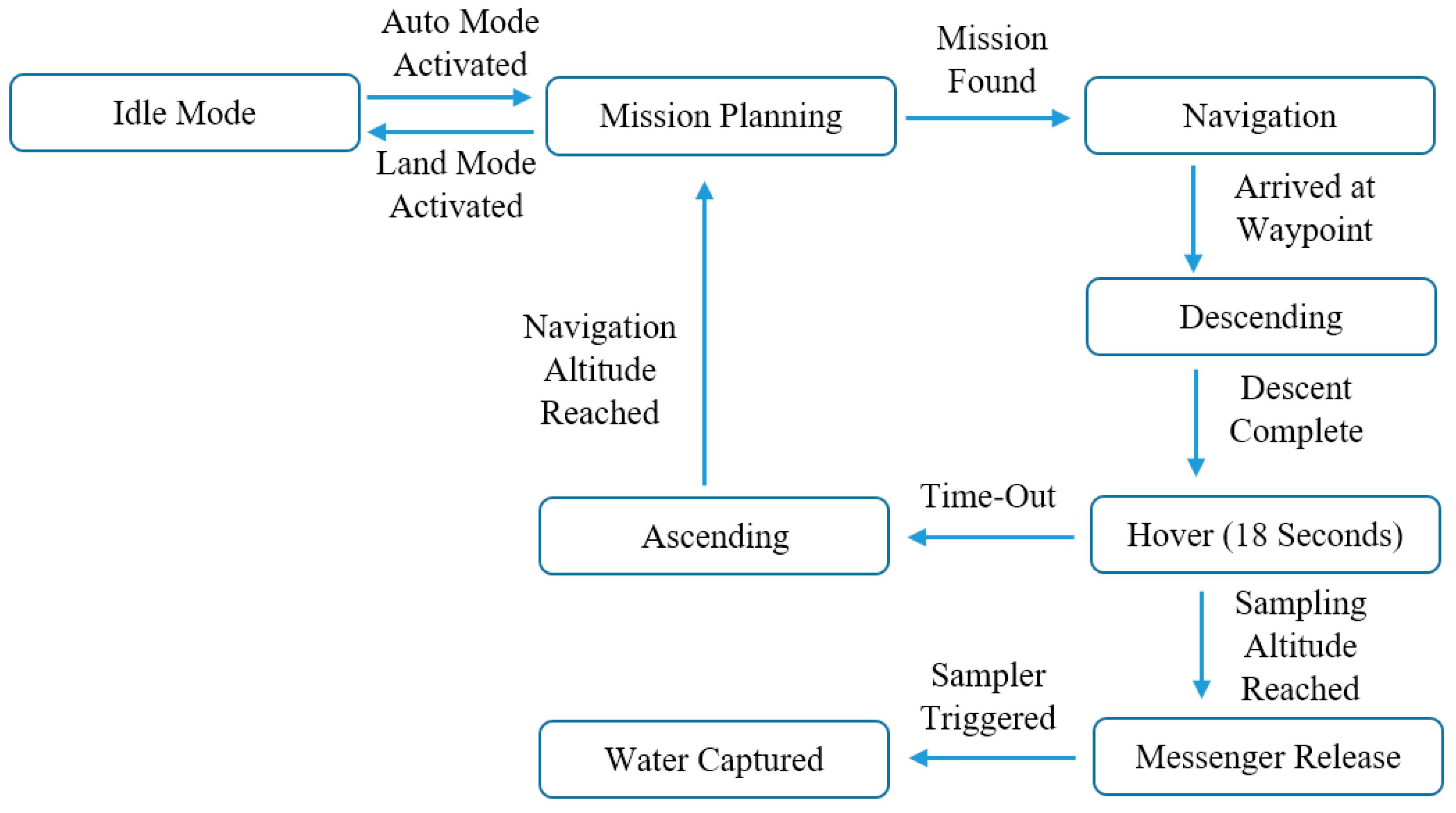
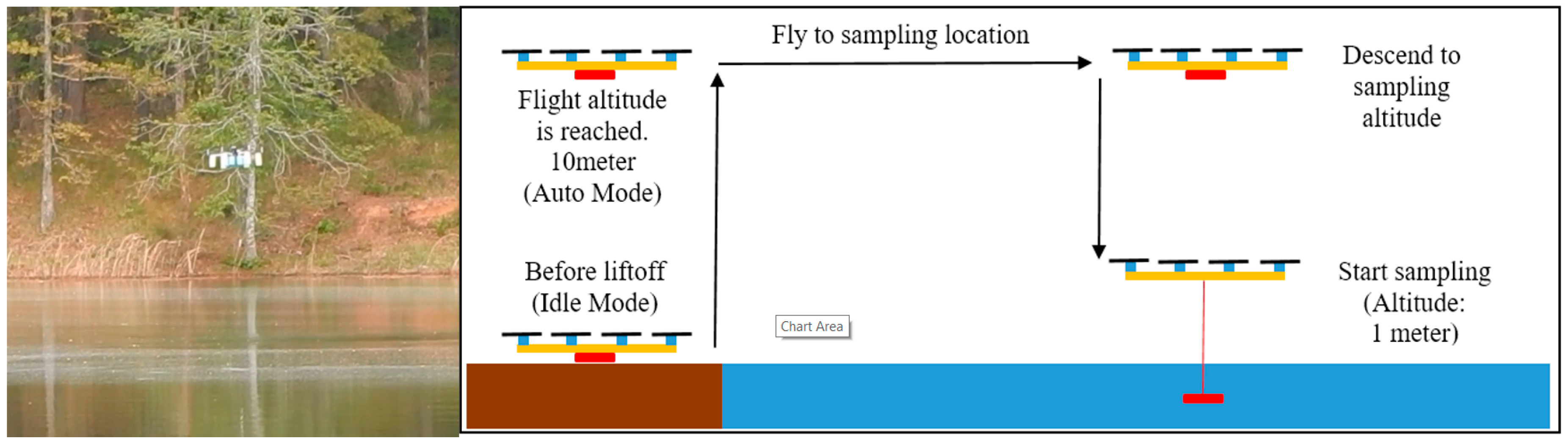
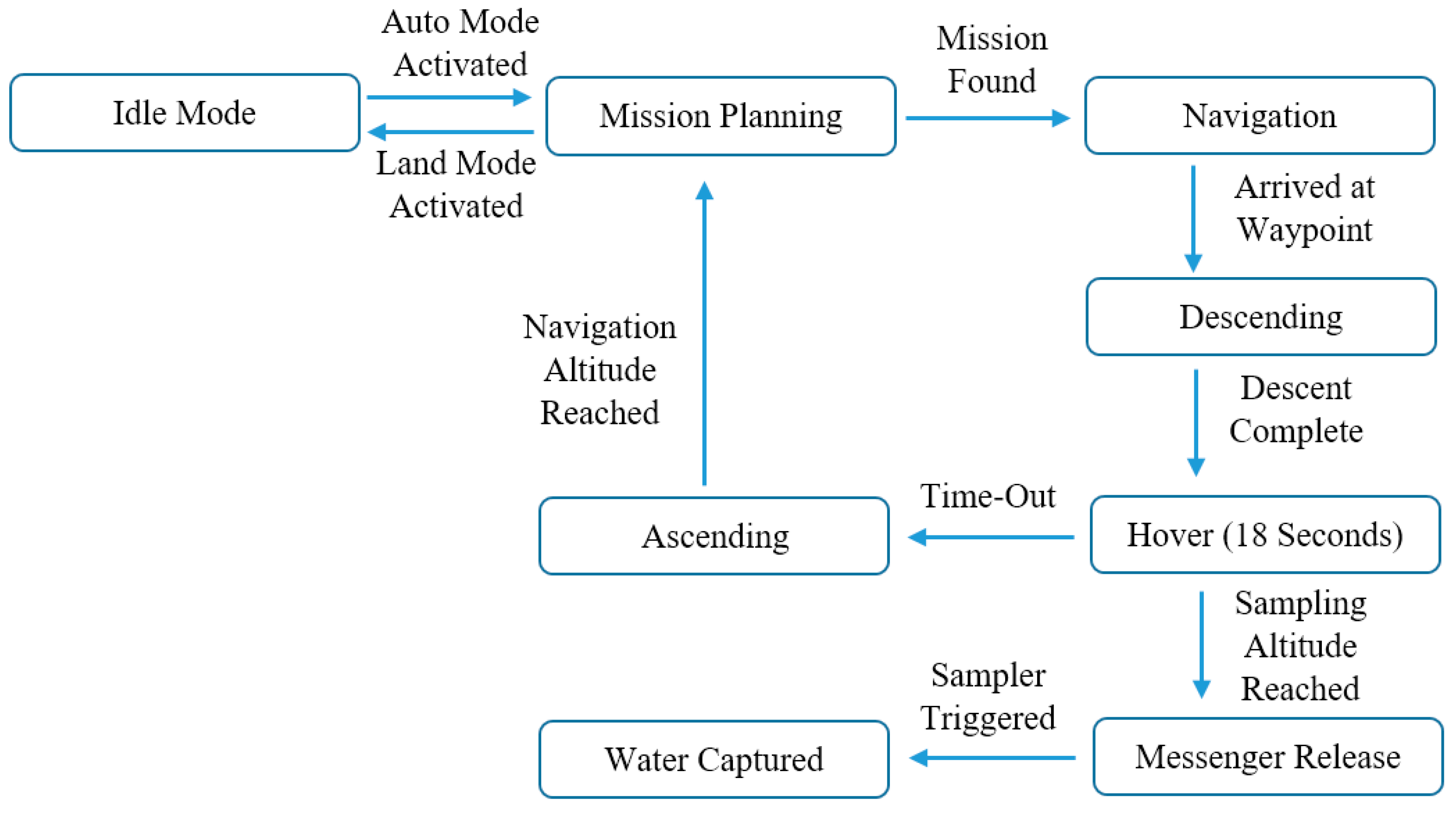
The schematic diagram of a UAV-assisted water sampling operation is shown in
Figure 6. Individual autonomous flight missions were conducted for each water collection flights. The sampling mechanism was set, the flight controller and power unit were connected, the motors were armed, and the UAV was set to “idle mode” before each flight. In this mode, the UAV was ready to be launched by radio controller to start its mission. Next, “mission mode” was selected from the radio controller, and the flight controller searched for a preset mission. The throttle level was brought to 50% to provide enough thrust to start the mission. As soon as the motors started rotating at 50% throttle, the UAV ascended to the preset altitude and navigate to the predefined location. Once the UAV reached the sampling location, it descended to the sampling altitude and hovered for 18 s. During this time, the subsystem mounted on the UAV released the messenger weight to trigger the water sampler. After 18 s, water was captured and the UAV ascended to the navigation altitude to return to the launching location to complete the mission. An autonomous landing option was used to provide safe landing.
Manual water samples were captured after each time the UAV ascended from the sampling point. A person in a kayak approached the same sampling point and captured the water sample at the same depth using an extendable wooden apparatus mounted water bottle. The time difference between the sample collections with two methods were less than 60 s. The extendible wooden apparatus was marked with measured lines to estimate the sampling depth. The water bottle was filled with approximately 300 mL of water sample but only 100 mL was used during measurements. Water samples were carried to the shore immediately after sampling for measurements. Both manual and UAV-assisted water samples were measured at the same time within 3 h on each sampling day.
Measured data was used to confirm that the UAV-assisted water sampling method can be replaced with the manual water sampling method. Water quality indices evaluated were dissolved oxygen (DO), temperature, electrical conductivity (EC), pH, and chloride. Temperature, pH, and DO measurements need to be made either in situ or on-site because these constituents cannot be analyzed adequately after transporting the sample to a laboratory [
42]. Therefore, these parameters were measured on-site with handheld measurement sensors. Chloride ions were measured in the lab since these chemical properties do not change rapidly after sampling and filtering. In order to determine the consistency between manual and UAV-assisted water sampling, three replicates of water samples were collected at each sampling location and water quality constituent measurements were made.
2.7. Water Sampling Depth Estimation Procedure
Shallow samples are generally collected from surface waters at a depth of 0–25 cm or from the surface, and deep samples are taken from surface waters at a depth of more than 100 cm [
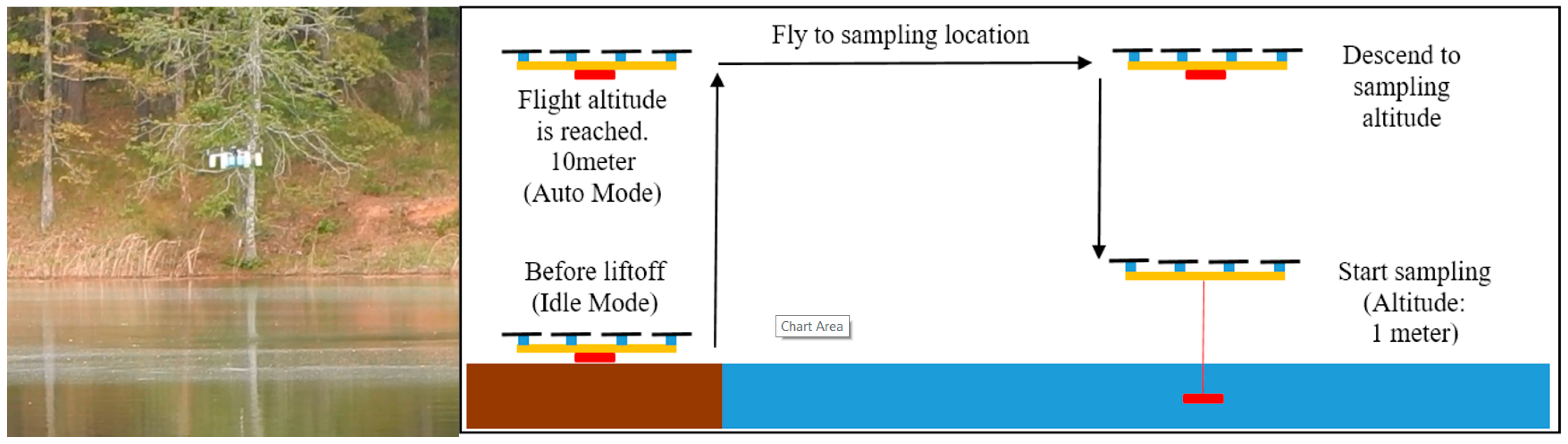
43]. The water sampler was suspended from the UAV with a 1.8-m-long tether. Once the approximate altitude of the UAV was determined from the flight controller, sampling depth was estimated by calculating the difference between the tether length and the altitude of the UAV during water sampling. The altitude data collection was made while flying the UAV autonomously during a water sampling mission (
Figure 7).
The altitude data was retrieved from the flight controller using the MAVLink protocol [
44]. The control tuning (CTUN) registrar is where the altitude information of autonomous flights are stored in the flight controller [
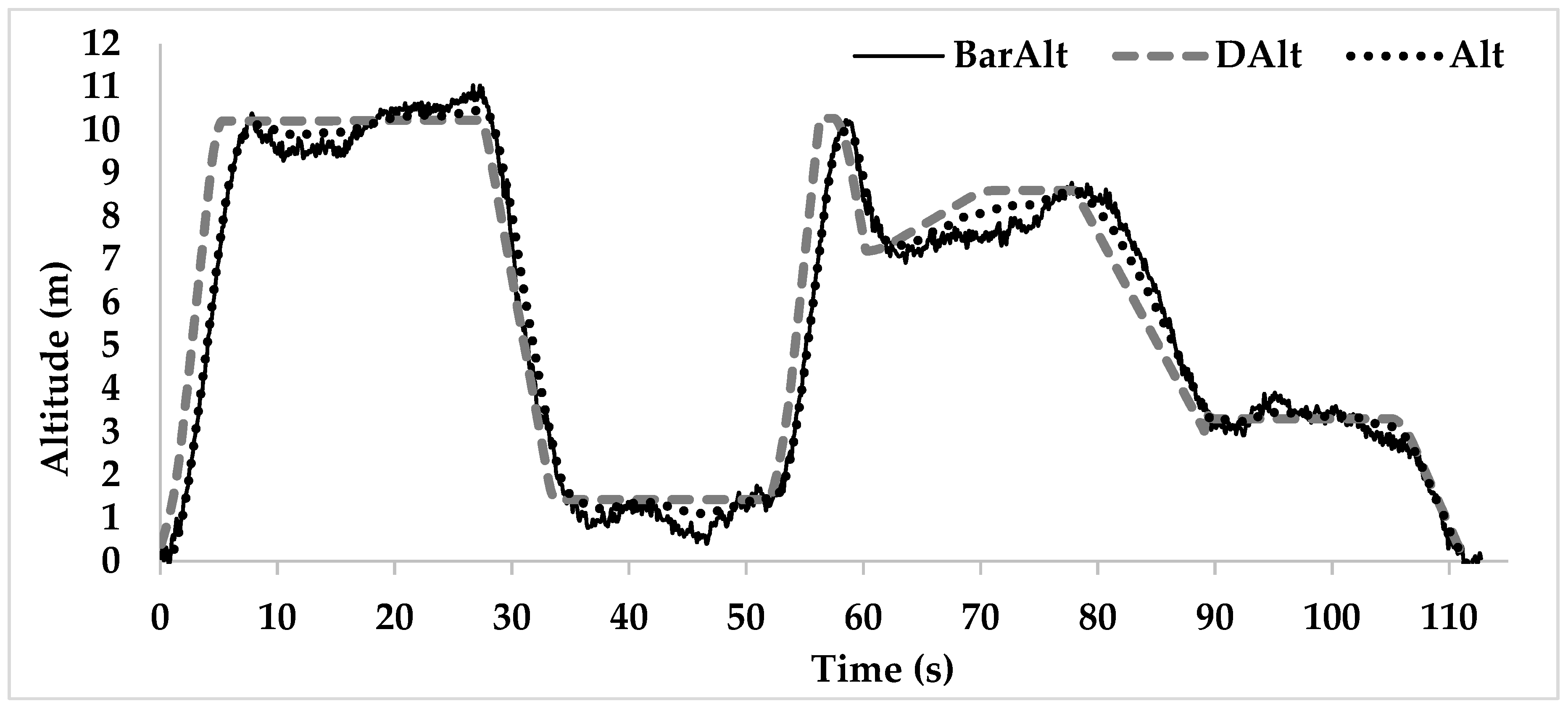
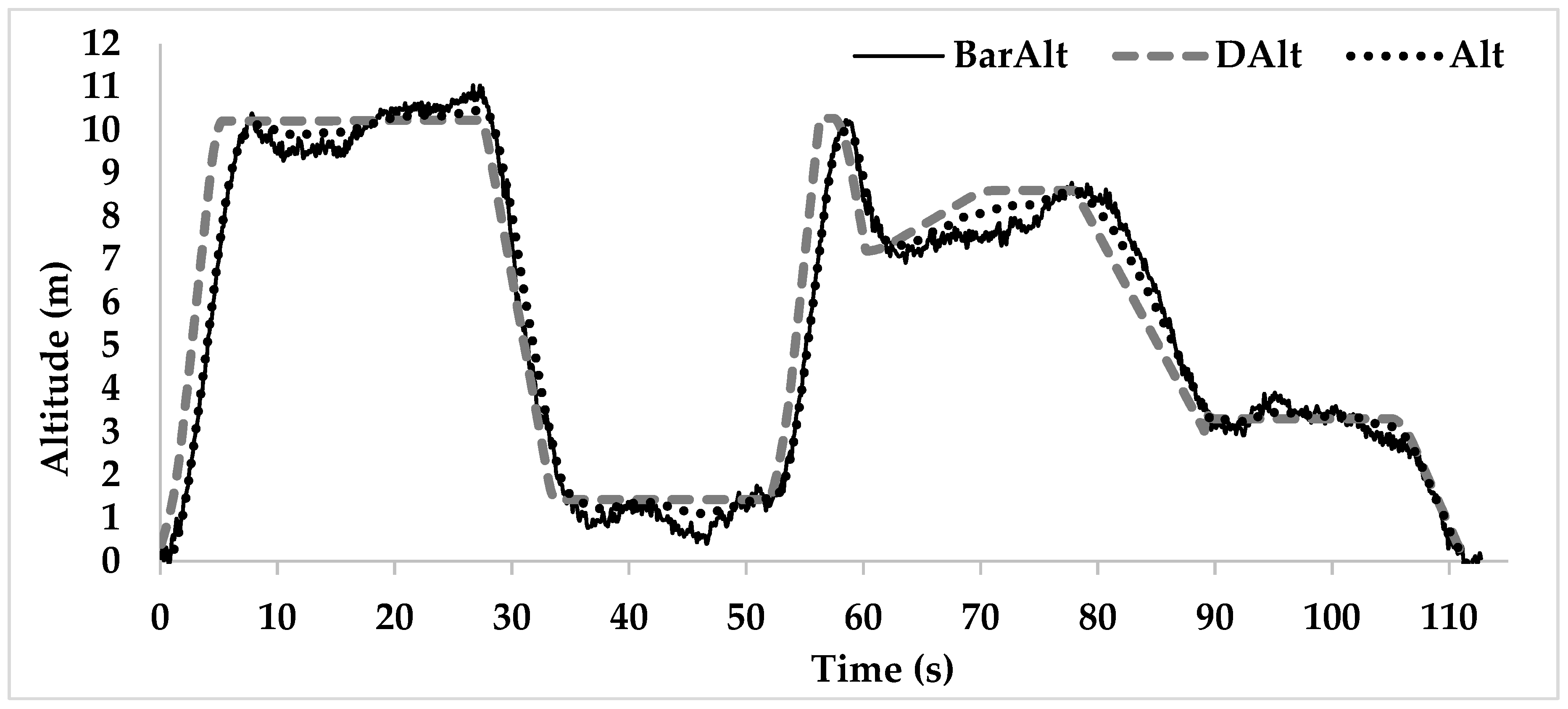
45]. CTUN registrar information includes the barometer altitude (BarAlt), the desired altitude (DAlt), and the inertial navigation altitude estimate (Alt) that is driven from filtering algorithms [
46]. The filtering algorithms are used to estimate the position, velocity and angular orientation based on gyroscope, accelerometer, compass, GPS, airspeed, and barometric pressure [
47,
48]. Therefore, the autonomous navigation and the altitude estimations of the UAV were dependent on all the sensor inputs and filtering algorithm. Because the altitude of the UAV was dependent on the listed sensors and filtering algorithms, their individual altitude outputs from the UAV were similar (
Figure 8). Since an approximate altitude was needed for this study, only the barometer altitude outputs were used to estimate the sampling depth.
2.8. Water Quality Measurement Procedure
Water quality parameters including pH, DO, EC, temperature, and chloride were measured from both manual and UAV-assisted water samples. A Sension156 portable multi-meter (Hach, Loveland, CO, USA) was used to measure pH and EC. An HQ10 portable DO meter (Hach, Loveland, CO, USA) was used to measure DO and temperature. Chloride measurements were made using a DR/2400 spectrophotometer (Hach, Loveland, CO, USA). Each collected water sample was poured into a beaker for on-site measurements and results were recorded manually. Probes were rinsed with deionized water after each sampling and during calibration. A field notebook of water sampling and on-site analysis information sheet was used to record data. After on-site measurements, water samples were stored and transported to the lab for chloride measurements.
2.9. Data Analysis
Analysis on recorded CTUN altitude data was conducted to determine if the average altitude was 1.0 m above the water surface during 18 s of water sampling duration. The total autonomous flight time was 1.5 min for each mission and only 18 s of this time was used for hovering over water surface during sample collection (
Figure 8).
Figure 8 shows the relationship between barometric altitude estimation (BarAlt), desired altitude (DAlt), and inertial navigation altitude estimate (Alt) that was recorded during one of the autonomous water sampling mission.
When the UAV hovers at 1.0 m altitude from water surface, the water sampling depth would be taken as 0.8 m since the total length of the tether was 1.8 m. Barometric altitude data from three dependent runs were retrieved from Matlab
® (R2017a, MathWorks, Natick, MA, USA) output. In each of the three dependent runs, there were 180 altitude measurements. These measurements were dependent replicates. Data were recorded with 100 ms intervals [
46]. In this case, these 180 barometer altitude data points represent the altitude measurements during the 18 s of hovering. Weather conditions during the autonomous flight experiments are shown in
Table 3. Ambient weather condition information was retrieved from a commonly available smartphone application named “Weather” (Apple, Cupertino, CA, USA). The weather data was used to monitor overall weather conditions to decide whether to fly the UAV or not. If the weather forecast indicates rain, storm, or high wind speeds, then the conditions would not be suitable for flying the UAV.
The collected water quality data were used to understand if the water quality measurements differ between two sampling methods: manual and UAV-assisted. In addition, an analysis was conducted to determine the actual water sampling depth during autonomous water sampling mission.
Water samples were collected in summer between 6 and 15 July 2016. The first four days of sampling (6–9 July) and the last five days of sampling (11–15 July) were made continuously. Because of weather conditions, water samples were not collected on 10 July. We hypothesized that the water quality constituent measurements were the same for the samples collected from the manual water sampling method and from the UAV-assisted water sampling method. For each water quality parameter, a mixed effects model was used to compare the UAV-assisted and manual methods of data collection. Day, method, and day–method interactions were the fixed effects, and location within day was included as a random effect.
4. Conclusions
An autonomous water sampling system containing a UAV and water capturing mechanism was developed and tested with indoor and outdoor experiments. The system performed autonomous water sampling tasks by collecting water samples with an average of 130 mL at 0.56–0.79 m depths. The system autonomously collected water samples at wind speeds less than 24.14 km/h. The UAV caused minimal turbulence on water surfaces while hovering compared to windy conditions with wind speeds greater than 24.14 km/h (15 mph). The system was tested for its consistency regarding water constituent measurements. Measured average EC and temperature values were not statistically different between the manual and UAV-assisted sampling methods. DO and pH measurements were statistically different with differences of 3.6% and 2.3%, respectively. These differences for DO and pH measurements were a function of error range of the measuring instruments (±0.2 mg/L for DO meter and ±0.01 for pH meter). The difference between the two methods for chloride measurements was 37.5%. The differences for the measured DO, pH, and chloride between the methods might be due to the temperature difference in water samples. Therefore, a different approach for determining the consistency between two methods would provide more accurate results.
The UAV-assisted water sampling had little impact on the time required for water sampling because of the size of the pond used for this study. The set-up process for the UAV-assisted water sampling, safety and pre-flight checks, and battery replacement between the flight missions took most of the time. The system would be more useful if it were used for sampling from larger waterbodies with greater surface areas. For each water sampling, a single battery was used. The highest amount of battery capacity was consumed for the longest sampling point mission (98 m). The UAV used for this study can navigate up to 196 m with a single battery, collect water samples, and safely return to the home location. The distance that the UAV travels would be longer if a battery with higher capacity is used.
In addition, a UAV-assisted water sampling system could provide advantages in water sampling sites that are not easy to access. A waterbody that presents access difficulties may be ideal to test whether the UAV-assisted water sampling system can reduce overall sampling time. The system can land on water surfaces and obtain water samples while floating on the water. The landing option during water sampling might provide advantages during water sampling in fast-flowing water, but further experiments are necessary. The UAV-assisted water sampler can certainly be used by field operators and scientists for remote water sampling to improve the resolution of water quality data.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}