Multi-Domain 2.5D Method for Multiple Water Level Hydrodynamics


Abstract
:1. Introduction
2. Mathematical Models of the Multi-Domain 2.5D Method
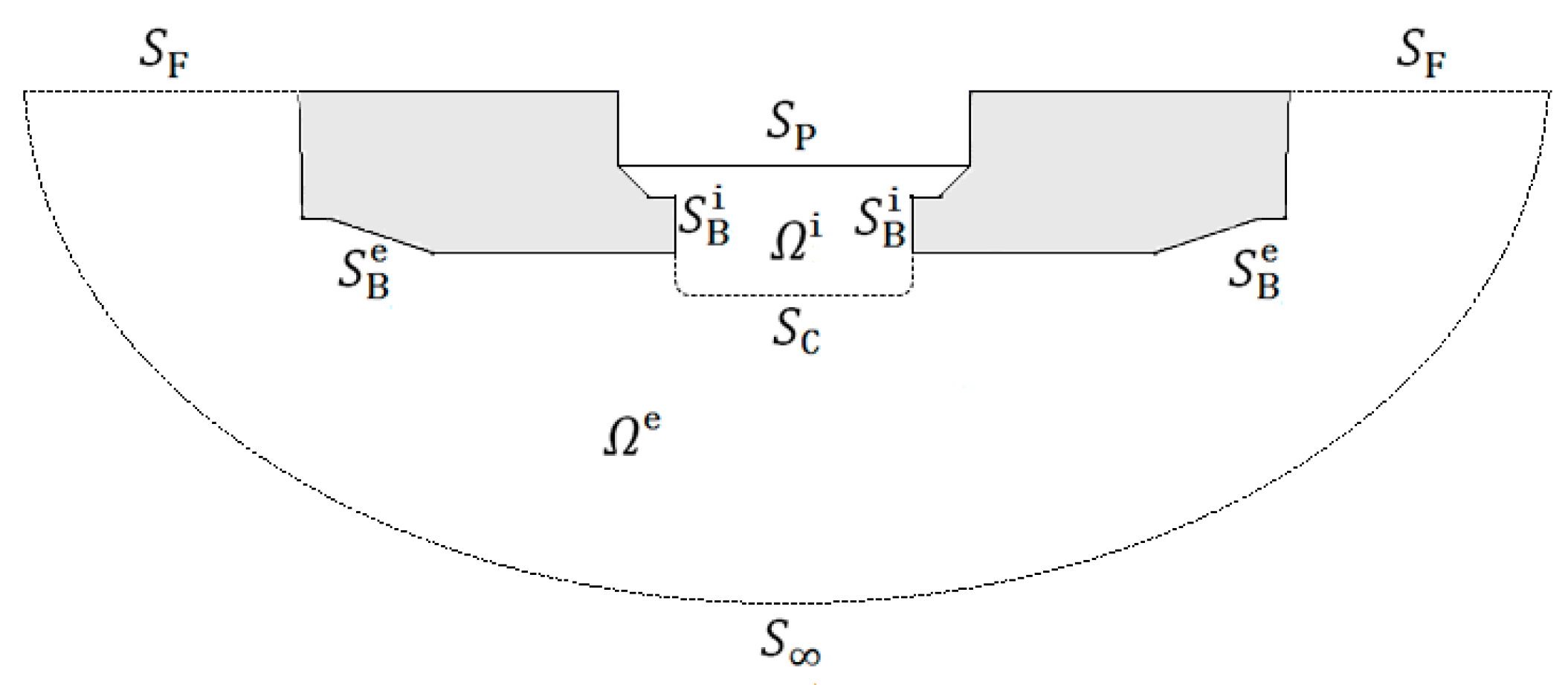
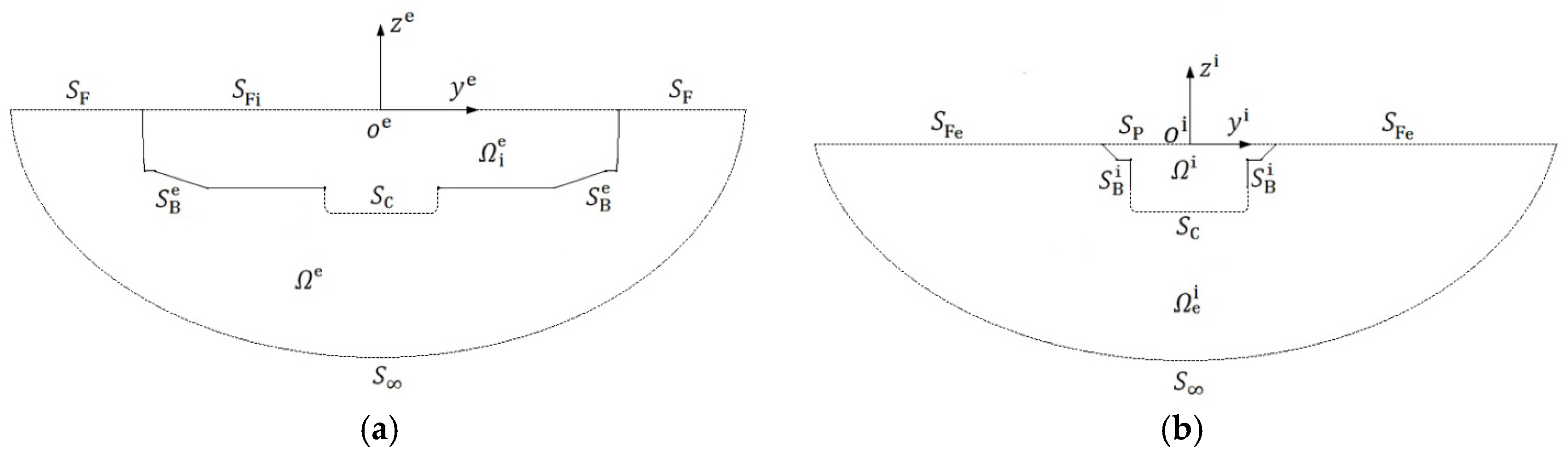
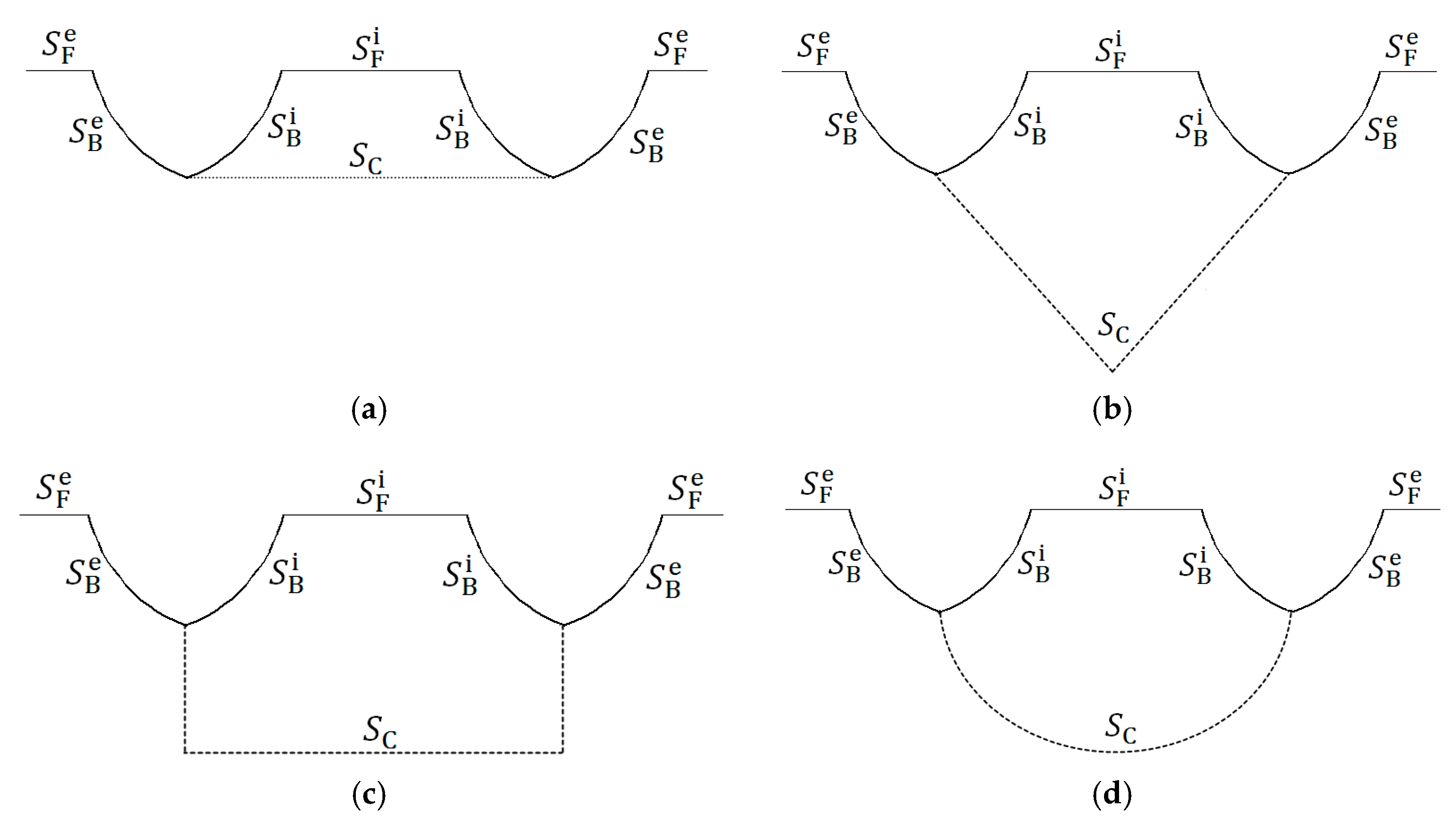
2.1. Partition of Water Domain and Boundary Value Problem
2.2. Multi-Domain 2.5D Method
3. Application of the Multi-Domain 2.5D Method for Multi Water Level Hydrodynamics
3.1. Validation of the Multi-Domain 2.5D Method
3.2. Multi-Domain 2.5D Method for the Hydrodynamics of an SES
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
Appendix B
References
- Connell, S.B.; Milewski, M.W.; Goldman, B.; Kring, C.D. Single and multi-body surface effect ship simulation for T-Craft design evaluation. In Proceedings of the 11th International Conference on Fast Sea Transportation (FAST 2011), Honolulu, HI, USA, 26–29 September 2011; pp. 130–137. [Google Scholar]
- García-Espinosa, J.; Capua, D.D.; Serván-Camas, B.; Ubach, P.A.; Oñate, E. A FEM fluid–structure interaction algorithm for analysis of the seal dynamics of a surface-effect ship. Comput. Methods Appl. Mech. Eng. 2015, 295, 290–304. [Google Scholar] [CrossRef] [Green Version]
- Bhushan, S.; Mousaviraad, M.; Stern, F. Assessment of URANS surface effect ship models for calm water and head waves. Appl. Ocean Res. 2017, 67, 248–262. [Google Scholar] [CrossRef]
- Sørensen, A.J.; Egeland, O. Design of ride control system for surface effect ships using dissipative control. Auromadca 1995, 31, 183–199. [Google Scholar] [CrossRef]
- Bandas, J.C.; Falzarano, J.M. A numerical investigation into the linear seakeeping ability of the T-Craft. In Proceedings of the 11th International Conference on Fast Sea Transportation (FAST 2011), Honolulu, HI, USA, 26–29 September 2011; pp. 99–105. [Google Scholar]
- Guo, Z.Q.; Ma, Q.W.; Yang, J.L. A seakeeping analysis method for a high-speed partial air cushion supported catamaran (PACSCAT). Ocean Eng. 2015, 110, 357–376. [Google Scholar] [CrossRef]
- Xia, Z.; Shi, Y.; Cai, Q.; Wan, M.; Chen, S. Multiple states in turbulent plane Couette flow with spanwise rotation. J. Fluid Mech. 2018, 837, 477–490. [Google Scholar] [CrossRef]
- Wang, J.; Ma, Q.W.; Yan, S.; Chabchoub, A. Breather rogue waves in random seas. Phys. Rev. Appl. 2018, 9. [Google Scholar] [CrossRef]
- Guo, Z.Q.; Ma, Q.W.; Hu, X.F. Seakeeping analysis of a wave-piercing catamaran using URANS-based method. Int. J. Offshore Polar 2016, 26, 48–56. [Google Scholar] [CrossRef]
- Shin, D.M.; Cho, Y. Diffraction of waves past two vertical thin plates on the free surface: A comparison of theory and experiment. Ocean Eng. 2016, 124, 274–286. [Google Scholar] [CrossRef]
- Chen, X.B.; Duan, W.Y. Multi-domain boundary element method with dissipation. J. Mar. Sci. Appl. 2012, 11, 18–23. [Google Scholar] [CrossRef]
- Faltinsen, O.; Zhao, R. Numerical predictions of ship motions at high forward speed. Philos. Trans. R. Soc. Lond. A 1991, 334, 241–252. [Google Scholar] [CrossRef]
- Ma, S.; Duan, W.Y.; Song, J.Z. An efficient numerical method for solving “2.5D” ship seakeeping problem. Ocean Eng. 2005, 32, 937–960. [Google Scholar] [CrossRef]
- Guo, Z.Q.; Ma, Q.W.; Qin, H.D. A time-domain Green’s function for interaction between water waves and floating bodies with viscous dissipation effects. Water 2018, 10, 72. [Google Scholar] [CrossRef]
- Lee, C.H.; Newman, J.N. An extended boundary integral equation for structures with oscillatory free-surface pressure. Int. J. Offshore Polar 2015, 1, 347–353. [Google Scholar] [CrossRef]
- Bouscasse, B.; Broglia, R.; Stern, F. Experimental investigation of a fast catamaran in head waves. Ocean Eng. 2013, 72, 318–330. [Google Scholar] [CrossRef]
- Broglia, R.; Jacob, B.; Zaghi, S.; Stern, F.; Olivieri, A. Experimental investigation of interference effects for high-speed catamarans. Ocean Eng. 2014, 76, 75–85. [Google Scholar] [CrossRef]
- Van’t Veer, R. Experimental Results of Motions and Structural Loads on the 372 Catamaran Model in Head and Oblique Waves; Technical Report, Report No. 1130; Delft University of Technology: Delft, The Netherlands, 1998. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters (symbol) | Value | Parameters (Symbol) | Value |
|---|---|---|---|
| Length between perpendiculars () | 3.0 m | Longitudinal center of gravity () | 1.41 m |
| Beam overall () | 0.94 m | Vertical center of gravity () | 0.34 m |
| Beam demihull () | 0.24 m | Pitch radius of gyration () | 0.782 m |
| Distance between center of demihulls () | 0.70 m | Displacement () | 87.07 kg |
| Draft () | 0.15 m | Moment of inertia for pitch () | 53.245 kg·m2 |
| Parameters (symbol) | Value | Parameters (Symbol) | Value |
|---|---|---|---|
| Length overall () | 3.0 m | Averaged trim | 3.42° |
| Beam overall () | 0.7 m | Moment of inertia for pitch () | 77.4 kg·m2 |
| Cushion length () | 2.5 m | Static cushion overpressure | 760 Pa |
| Cushion breadth () | 0.24 m | Air inflow rate | 150 |
| Displacement () | 145 kg | Fan characteristic value | −7.2 × 10−5 |
| Averaged sinkage | 0.73 cm |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Z.; Ma, Q.; Qin, H. Multi-Domain 2.5D Method for Multiple Water Level Hydrodynamics. Water 2018, 10, 232. https://doi.org/10.3390/w10020232
Guo Z, Ma Q, Qin H. Multi-Domain 2.5D Method for Multiple Water Level Hydrodynamics. Water. 2018; 10(2):232. https://doi.org/10.3390/w10020232
Chicago/Turabian StyleGuo, Zhiqun, Qingwei Ma, and Hongde Qin. 2018. "Multi-Domain 2.5D Method for Multiple Water Level Hydrodynamics" Water 10, no. 2: 232. https://doi.org/10.3390/w10020232
APA StyleGuo, Z., Ma, Q., & Qin, H. (2018). Multi-Domain 2.5D Method for Multiple Water Level Hydrodynamics. Water, 10(2), 232. https://doi.org/10.3390/w10020232