1. Introduction
With the advent of computational methods and computer processing power, the ability to tackle urban floods at the catchment level is clearly emerging, making it possible to apply an integrated approach to modelling rainfall-runoff processes along with surface flows [
1,
2]. Moreover, the availability of new data sources with higher quality and spatio-temporal resolution (e.g., rainfall data estimated by radars and terrain data derived from Lidar Detection and Ranging (LiDAR)) enables a more detailed description of hydrological processes that occur in the real world, paving the road towards a better numerical discretisation of the processes involved in urban floods.
On the other hand, the documented growth in the number of floods and urban population due to climate change [
3] clearly indicates the importance of an improved understanding of how flood waters interact with the urban environment both in space and time. Indeed, the development of a reliable approach to adequately describe urban flood processes has been recognised as a challenging task [
4].
Recent advances in urban flood modelling recognise the importance of 2D modelling algorithms to adequately reproduce urban floods [
5]. However, it should be borne in mind that model performance also depends on the quality of data used to construct a numerical representation of the catchment. This information includes soil characteristics, land use, topography and forcing conditions, all of which play an important role in the generation of an urban flood [
6,
7]. In reality, these data vary in space and time, and their representation at an adequate spatio-temporal resolution is necessary for an accurate performance of the numerical tool. However, datasets are rarely homogeneous in space and time, which leaves the door open to the exploration of an adequate level of complexity and detail for this purpose.
Among the main factors identified to adequately reproduce urban floods, the uncertainty of rainfall distribution in time and space is one of the main sources of error [
8]. It is well known that a good knowledge of precipitation at appropriate spatial and temporal scales enhances modelling of rainfall-runoff processes in urban catchments [
8,
9,
10,
11,
12,
13]. Accurate estimations of precipitation in urban areas require a dense rain gauge network combined with an effective analysis method. However, rain gauge networks are generally too sparse spatially to provide such detailed information [
14]. On the other hand, information acquired with weather satellites enables a better spatial description of rainfall fields, but also lacks a proper spatial resolution for urban applications with grids of 10 km or coarser [
15,
16]. Furthermore, weather radar measurements are inherently uncertain to some degree, as the relationship between reflectivity and actual rainfall on the ground requires the derivation of empirical coefficients [
17]. An alternative way of making use of these data is to blend rain gauge and weather radar data [
18,
19,
20].
In the literature, when modelling urban floods, it has been largely recognised that the spatial variability of rainfall is a source of uncertainty that affects model performance. However, most of the publications aimed at the investigation of this topic have considered theoretical scenarios, with little reference to case studies of actual events [
8]. Therefore, more research is required that incorporates case studies from the real world and that investigates how the spatial variability of rainfall affects flood predictions in urban environments. This could be done by studying multiple events and locations that variate parameters like catchment size, percentage of urbanization, topography and quality of available rainfall data. To that end, we propose here a step in that direction by studying the impact of rainfall variability on the reproduction of a real-world urban flood event.
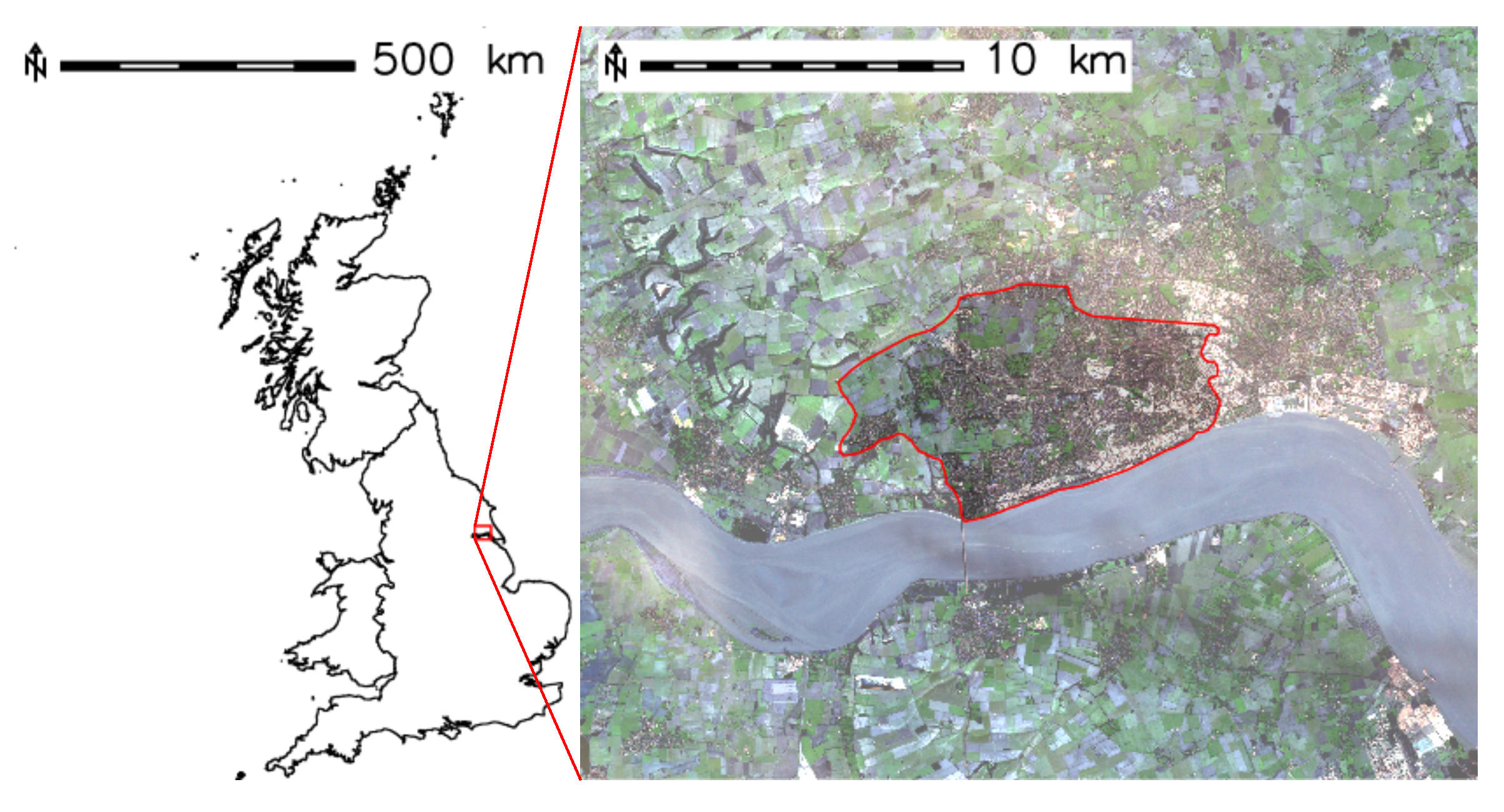
The case study corresponds to the urban flood registered in the United Kingdom on 25 June 2007, when the city of Kingston upon Hull (later referred to as Hull), East Yorkshire, suffered heavy flooding that affected 8600 homes and 1300 businesses [
21]. Although the numerical reproduction of this event has been reported in Yu and Coulthard [
1] and Courty et al. [
2], the integration of spatially-variable rainfall has not been discussed or attempted. Both numerical approaches resolve the inertial equation proposed by Bates et al. [
22], incorporating the Green–Ampt formula to simulate the infiltration process, differing only in the way the adaptive time step is implemented. Notably, in both studies, rainfall was considered using hourly measurements of only one rain gauge located at the University of Hull. Therefore, the precipitation was assumed to be spatially uniform within the catchment.
The purpose of this study is to investigate how a better definition of the spatial variability of rainfall impacts the numerical reproduction of the severe floods registered in Hull, U.K., in 2007. Flood maps derived from the use of a uniform rainfall field against those resulting from a merged product from weather radar and rain gauge data will be compared and discussed. Focus will be given to the western part of the city of Hull, which was the most affected according to Coulthard and Frostick [
21].
This paper is organised as follows:
Section 2 introduces the flood inundation model used to replicate this event, as well as the forcing data required to run the model;
Section 3 presents the calibration process and the results;
Section 4 discusses the outcomes in light of similar studies and summarises the main conclusions derived from this investigation.
4. Discussion and Conclusions
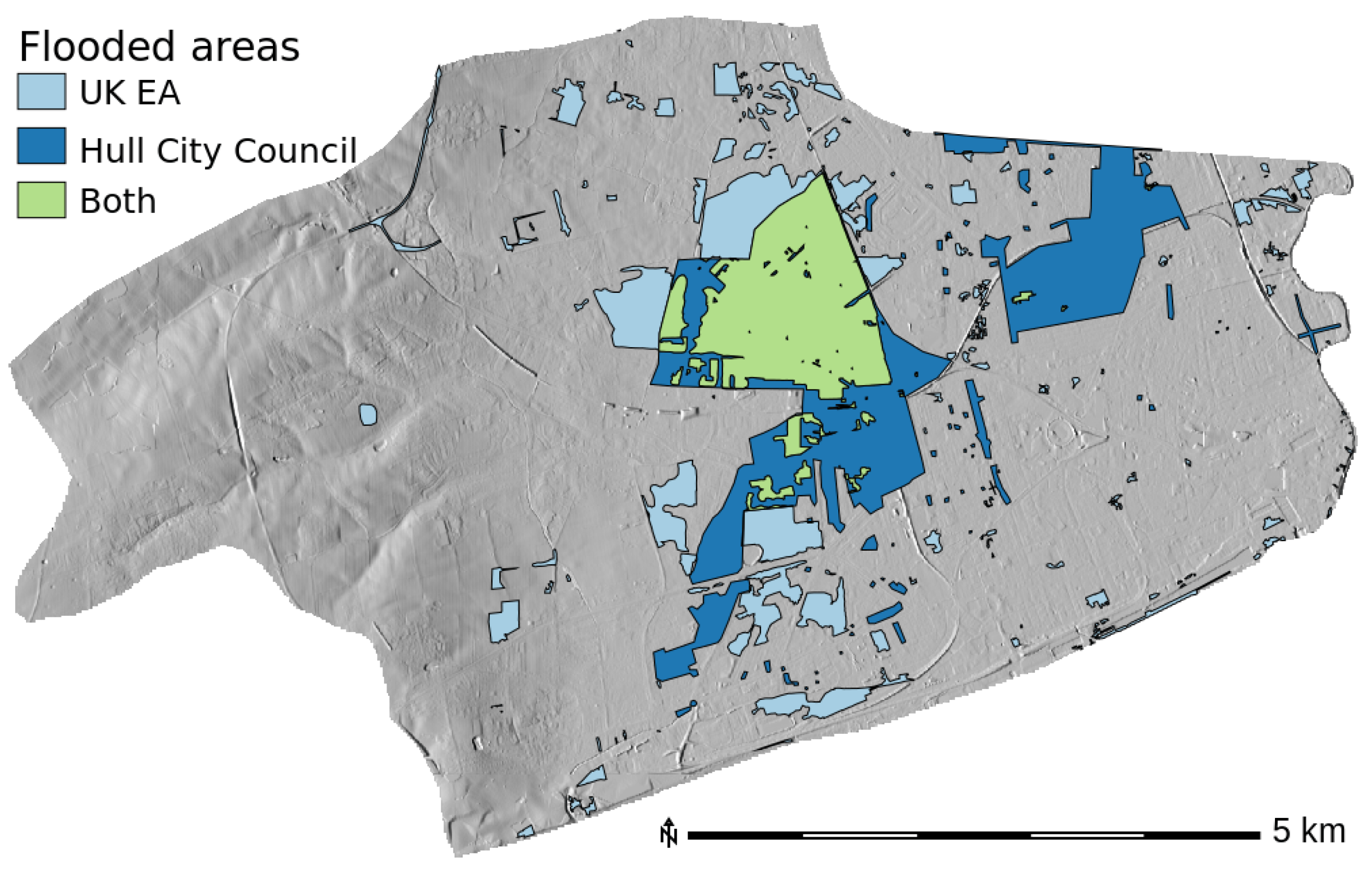
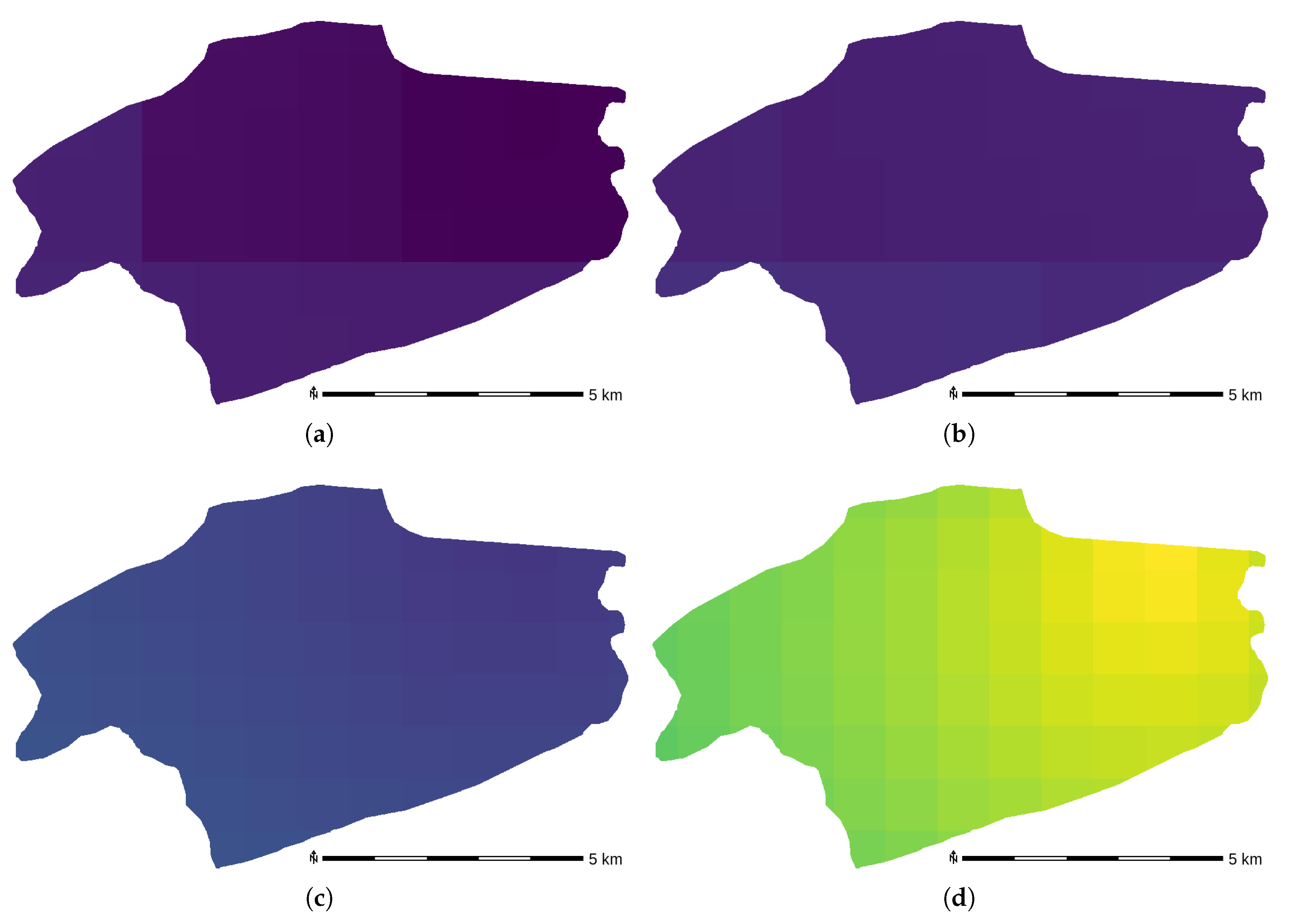
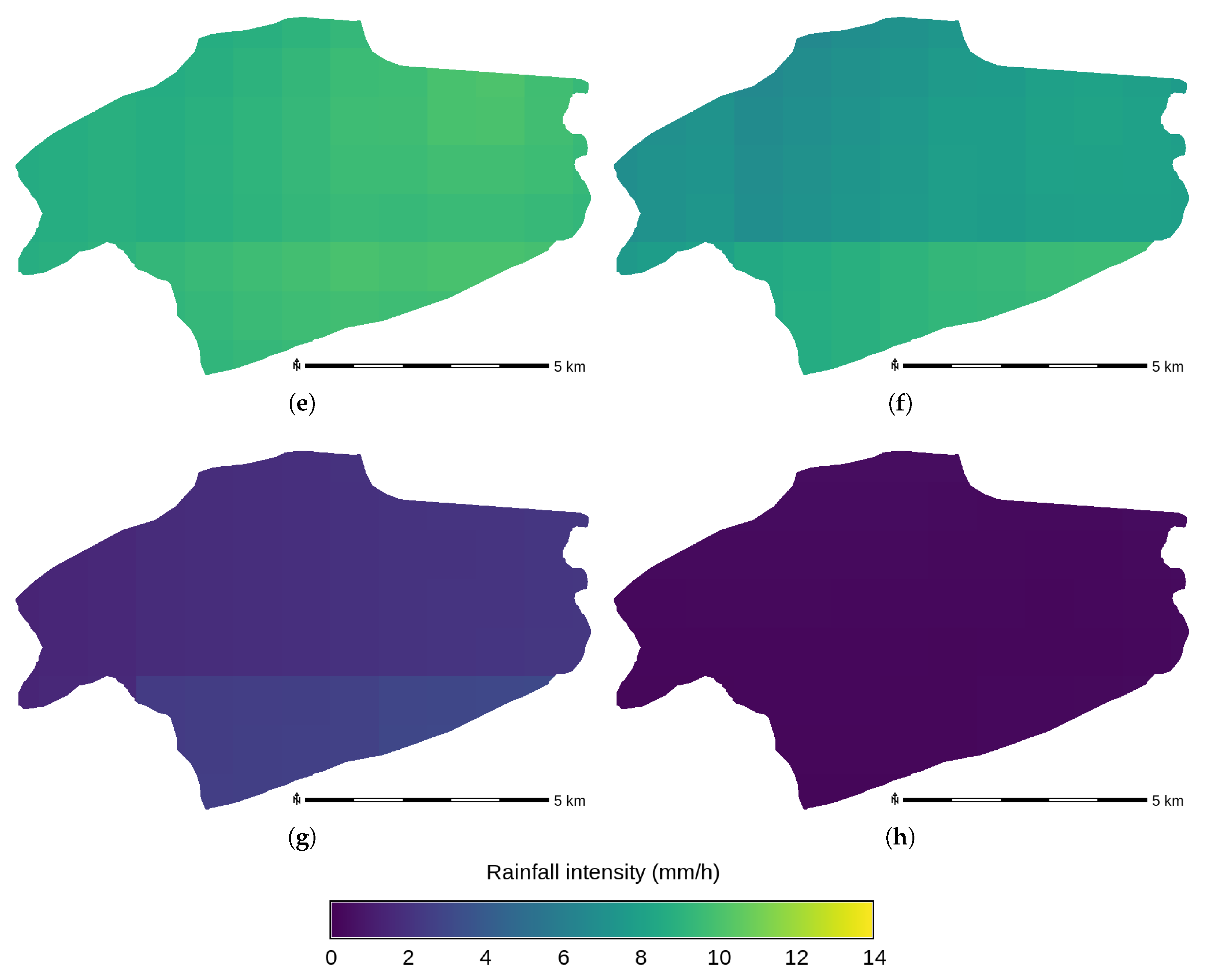
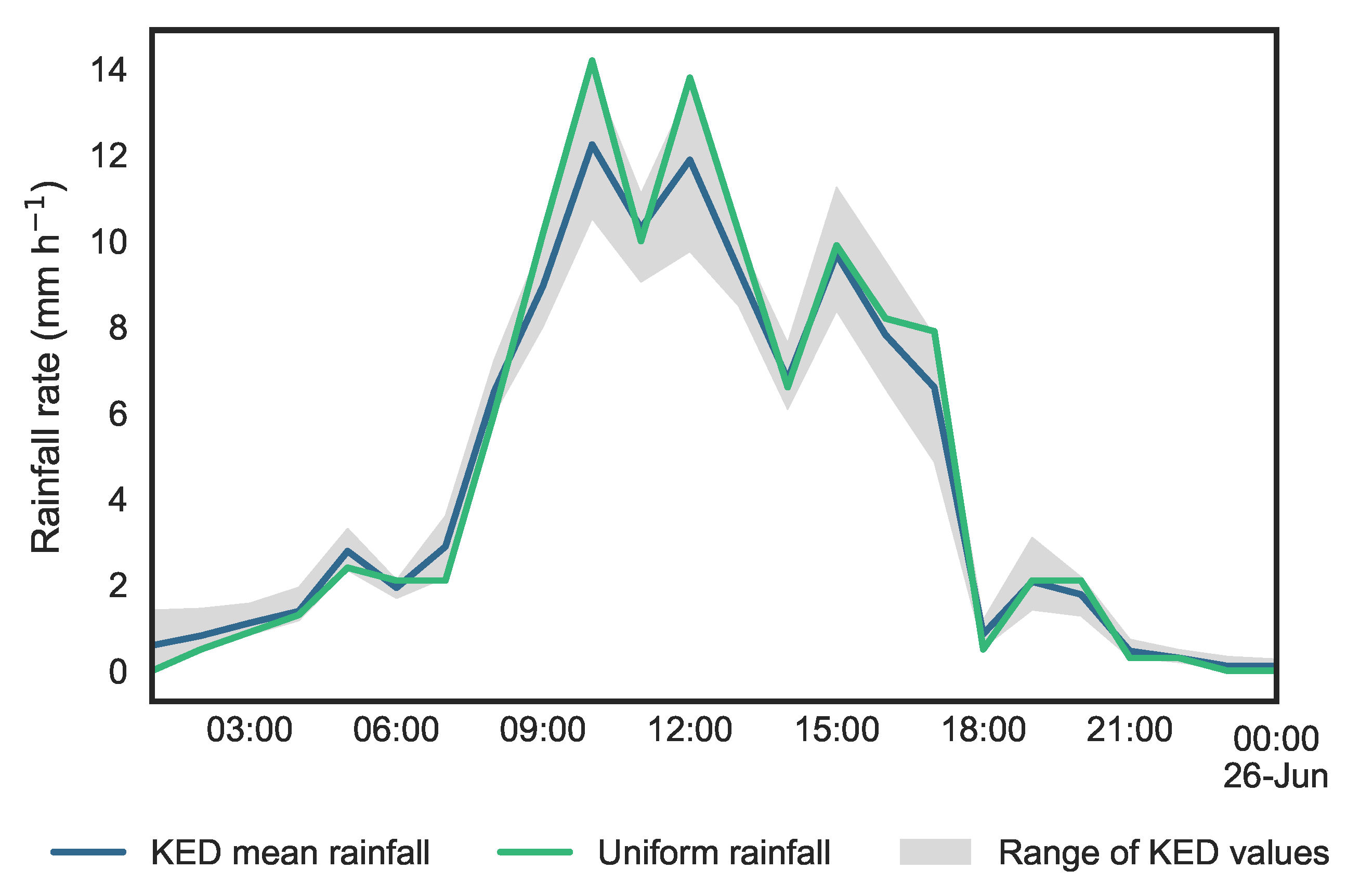
In this paper, we compared the computer simulation results obtained by the use of uniform and KED rainfall to the observed inundation extents of the historical event of June 2007 in Hull, U.K. Although the spatial variability of the KED rainfall is slight (see
Figure 6), differences appear. For instance, the flooded area obtained with the KED rainfall is 8% lower than the one obtained with the uniform rainfall (see
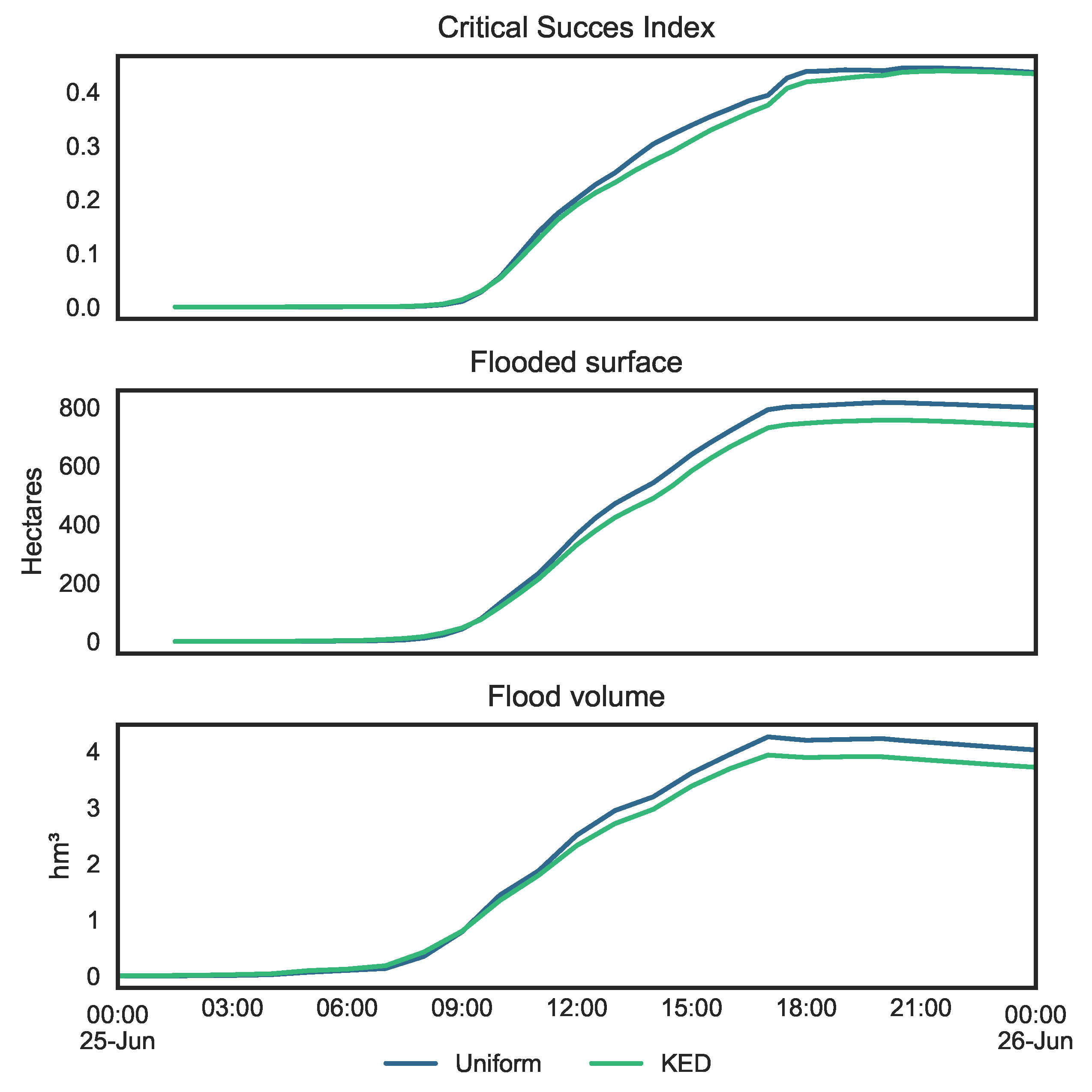
Table 7). This is due to a lower precipitated volume and, in turn, a lower flooded volume when using the KED. However, those differences in flood volume and inundated areas do not reflect in the skill scores obtained by the two rainfalls when comparing the computed flood extents to the observations of actual affected zones. Indeed, the differences in CSI for those two rainfalls are not sufficient to be conclusive and should not be used to assert the superiority of one rainfall datum against the other.
Two factors inherent to this specific event might influence those results. First, the observations of flooded zones are unlikely to accurately identify the affected areas (see
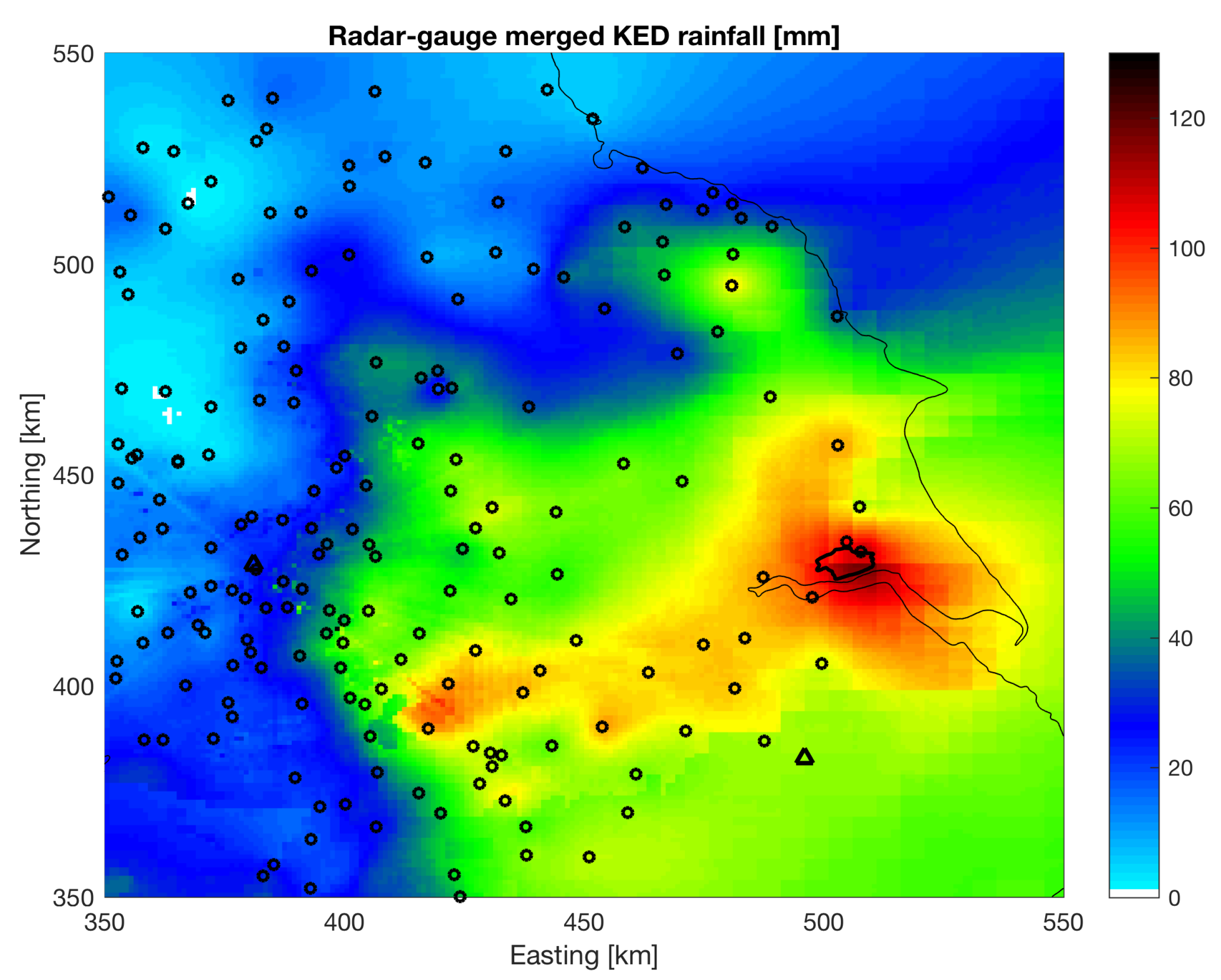
Section 2.2.3). This uncertainty in the observations reduces the reliability of the calibration and evaluation processes. Second, the available radar data for this event come from equipment rather far from the study area. This results in a practical spatial resolution of around 5 km. Furthermore, there were missing time periods in the radar data that needed to be filled using nowcasting interpolation before preforming the KED radar-gauge merging.
Unfortunately, uncertain or scarce observations are common during extreme flood events (e.g., [
43]). Maps of observed flooding are especially difficult to obtain in urban areas due to the short time scale of their occurrence (usually a few hours). Few urban areas are instrumented, and remote-sensing techniques might be of limited use [
7]. In addition to the relatively low revisit time of spacecraft carrying high-resolution instruments, some technologies like multi-spectral imagery are seldom usable because of the cloud cover during or immediately after the precipitation event. In that sense, in spite of the limitations of the available data, the present case study can be considered data-rich because it includes both non-uniform rainfall data and observations of the affected areas.
Therefore, this study is a step forward in the direction of having a better understanding of the impact of the spatial variation of rainfall on the flood modelling of historical events. It shows that even with limited and uncertain data, the incorporation of the spatial variability of rainfall does have an impact on the numerical results. We can mention that should another flooding event occur in the same area, the definition of the rainfall data might improve due to the inclusion of the data of the Ingham radar, for the south of the study area (see
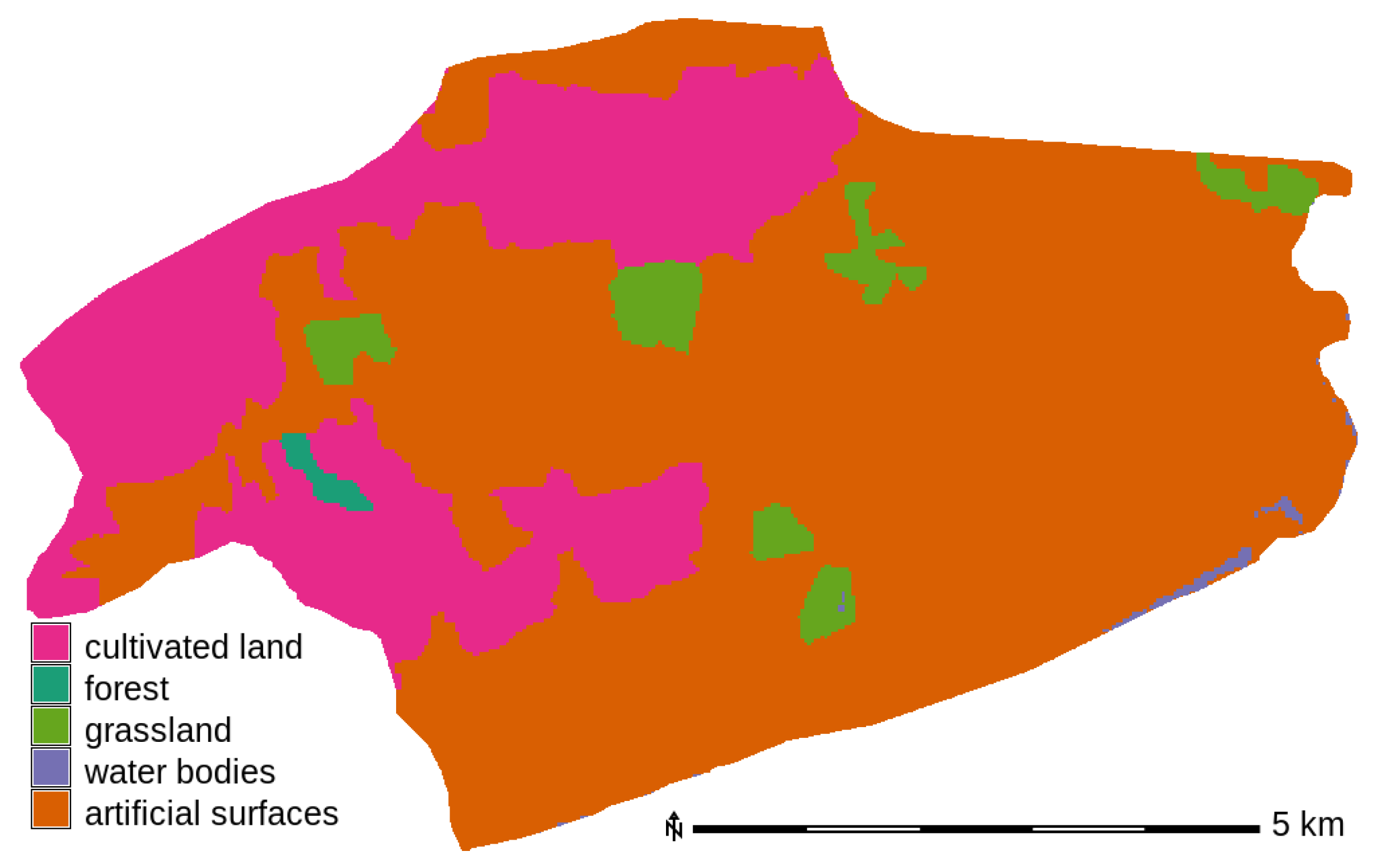
Figure 5), which in turn might improve the reproduction of the inundation. Each event is different, and the relative size of the precipitation compared to the study area is to be considered. In urban areas of limited extent like Hull, more localized events like convective precipitations might require even more consideration of the spatial component of rainfall. More similar studies should be carried out in the future that will tackle the subject with other types of events and study areas, including different types of meteorological events, topography and land use.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}