The values taken by the input parameters in the tests that follow are either extracted directly or inferred from the studies of V04, SV06 and KEPE10, with which the results will be compared (in the case of , and ), or estimated to optimize comparison with V04 and SV06 (in the case of , and ). For these latter surface layer parameters, which are kept fixed throughout the present study (for maximum generality and lack of more detailed information), the best fit was found for , and . These values are not inconsistent with those adopted in previous studies.
No previous estimate of
is available, since an atmospheric profile with an inversion was not considered in previous studies using the boundary layer model of SJD06, but a value of 0.06 seems reasonable for the height of a representative wind velocity (
) that lies within the surface layer, whose thickness is typically about 10% of the well-mixed layer. Concerning the other two parameters, for example in SJD06,
was assumed, whereas in Smith [
19]
took values of 0.5, 1 and 2, while from the values of
presented in his Table A1,
varied between 0.1125 and 2.25, assuming
. Although the value of
adopted here is smaller, the difference is modest, and the value of
falls within the interval considered by [
19].
3.1. Diagnosing Flow Stagnation
For the purposes of this study, flow stagnation downstream of the orography will be equated with rotor onset, although, as will be seen, that equivalence may be questionable. Comparisons of predictions from the present model with the numerical simulations of V04 and SV06 and the laboratory experiments of KEPE10 require slightly adapting the flow stagnation condition Equation (
23). In the numerical simulations of V04 and SV06, a truncated-cosine hill is assumed,
and
is held constant at 0.5, whereas in KEPE10, a Gaussian hill is employed instead,
with its slope
held constant at 0.57, as described by Eiff et al. [
20] for experiments using the same kind of model orography.
It is convenient to express the flow stagnation condition in terms of the quantities held constant in each case. From Equation (
23), this yields:
for the cases addressed by V04 and SV06, or equivalently:
for the cases addressed by KEPE10. When comparing results from the present model to the regime diagrams of V04 or SV06, the inverse of the quantity given by Equation (
30) will be plotted (so that a higher likeliness of flow stagnation corresponds to higher values, i.e., a lower critical value of
), with special emphasis on the contour of two, corresponding to the value of
. The region of parameter space enclosed by this contour corresponds to a flow regime where stagnation has occurred (because
) and, hence, where rotors should exist. Similarly, when results are compared with the regime diagram of KEPE10, the inverse of the quantity given by Equation (
31) will be plotted, with special emphasis on the contour of 1.754 (corresponding to the inverse of
, assumed by those authors). The region enclosed by that contour delimits a parameter range where
, where stagnation and, hence, rotors are expected.
3.2. Numerical Simulations of Vosper (2004)
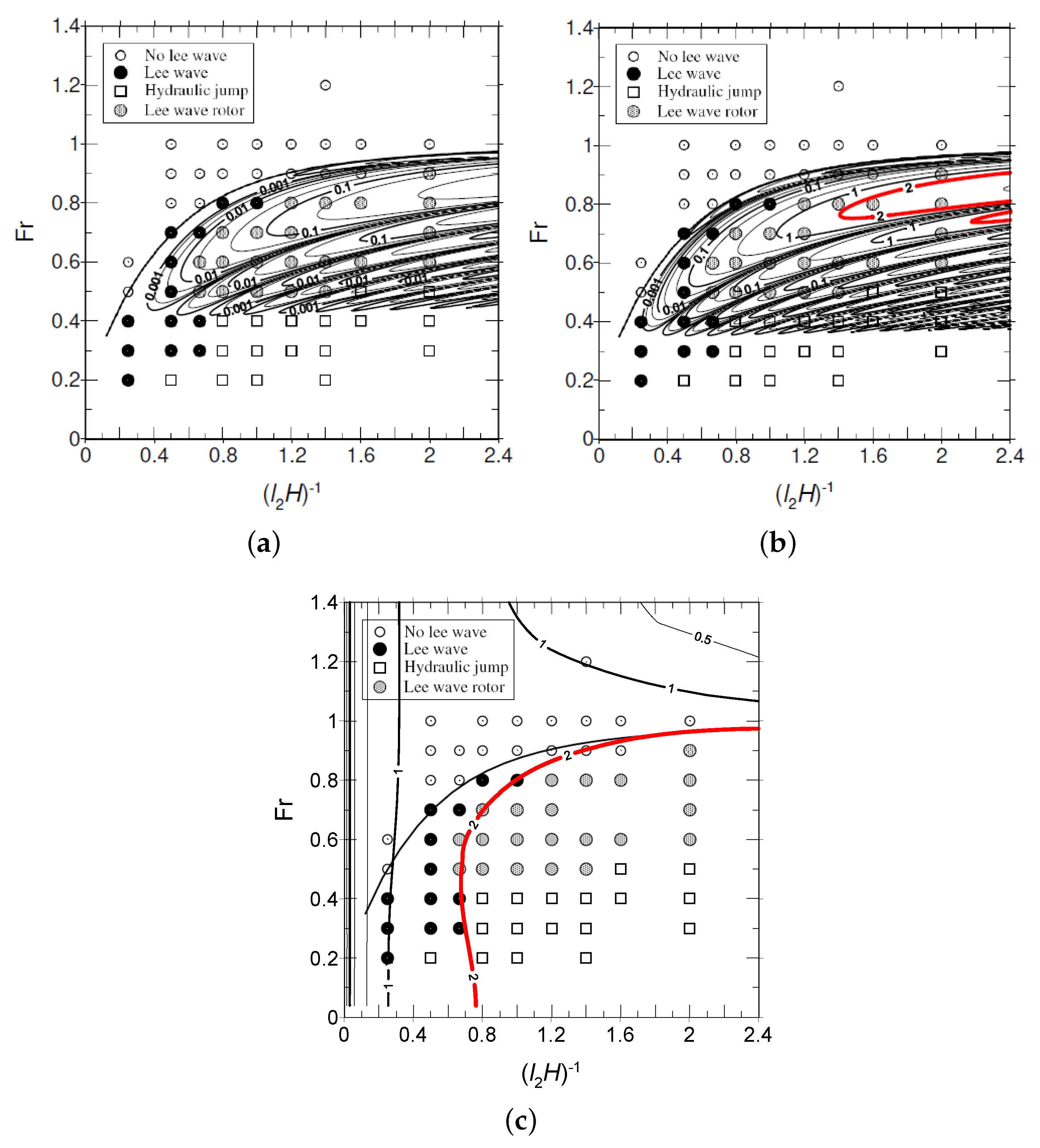
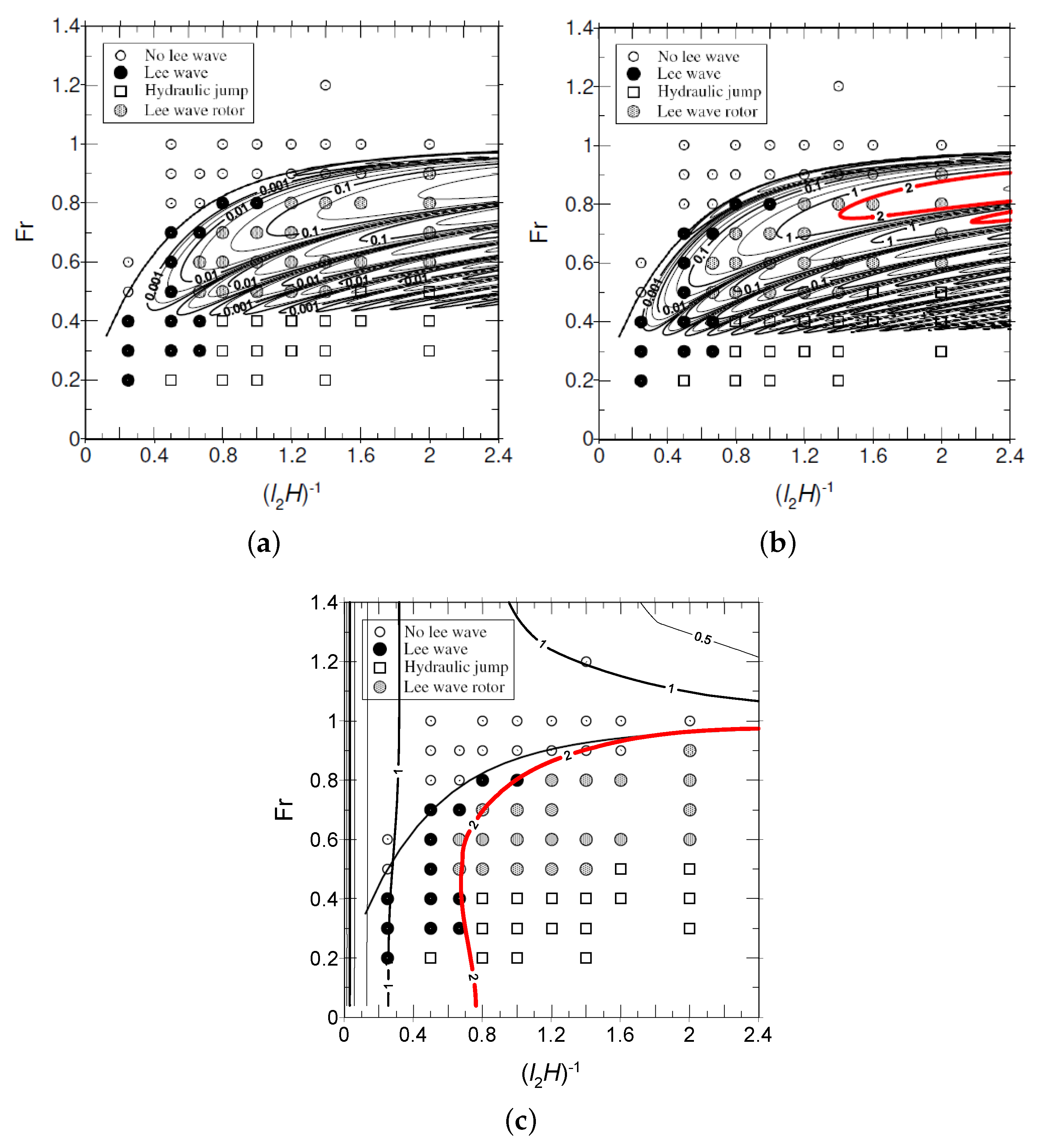
Figure 1 shows
as a function of
and
, superposed on the regime diagram of V04 (his Figure 9). In accordance with V04, it is assumed that
. Note that, due to the fact that
, the nonlinearity parameter that appears at the bottom horizontal axis in Figure 9 of V04 (
in the present notation) can be related to
through
. Only thus can the linear model presented here be compared with the numerical simulations of V04, since both
and
(but not
) are accessible to linear theory (as noted by TAM13).
Figure 1a shows results from the inviscid model expressed by Equation (
25), where the critical mountain height for flow stagnation can be expressed in terms of
via mere multiplication of Equation (
25) by
. Although the highest values of
are located directly over the region where rotors are diagnosed in the regime diagram of V04, the magnitude of this quantity that is necessary for flow stagnation is severely underestimated. Maximum values are just above 0.2, and the contour of two obviously does not appear in the graph.
Figure 1b shows results from the improved model where the effects of the amplification of
and attenuation of
in the surface layer are taken into account, but no feedback on the outer flow exists (Equation (
26)). The results are substantially improved, but the magnitude of
is still too small to be consistent with the occurrence of rotors in the regime diagram of V04. One of the reasons for this, as pointed out before, is that
is directly proportional, through Equation (
25), to the Fourier transform of the orography at the resonant wavenumber of the trapped lee waves
and is thus zero at the points in parameter space where
. As the Fourier transform of Equation (
28) has several zeros (at
, where
n is an integer; see Figure 14 of V04 and Equation (
29) of TAM13), the oblique troughs that can be observed in the contours in
Figure 1a,b result from these zeros.
Figure 1c shows the results from the full model, including the effect of the boundary layer on the outer flow, in addition to the direct boundary layer effects described above, and also including the contribution to flow stagnation of waves propagating vertically or evanescent in the upper layer in addition to trapped lee waves. It can be seen that the region of parameter space where
encompasses almost perfectly the region with rotors in the regime diagram of V04. However, it also includes most of the region where a hydraulic jump was observed to occur in those numerical simulations. Figure 8b of KEPE10 shows that at least some types of hydraulic jumps are characterized by localized flow stagnation on the lee slope of the orography, although this does not seem to occur in the case illustrated by Figure 8 of V04. On the other hand, Sachsperger et al. [
21] recently noted that hydraulic jumps may be a source of trapped lee waves (which are a prerequisite for rotors). This idea seems to be supported also by the inviscid results presented in Figure 7 of V04. It would be useful to develop a procedure to discriminate between rotors and hydraulic jumps in the present model, but that is beyond the scope of this study.
An interpretation of the behaviour of the flow stagnation condition in the regime diagrams may be facilitated by plotting the velocity perturbation associated with these flows. This only needs to be done for the model that produced the results of
Figure 1c, as the models that produced the results of
Figure 1a,b assume by design a train of sinusoidal waves downstream of the orography (since they only take into account the trapped lee wave component of the flow).
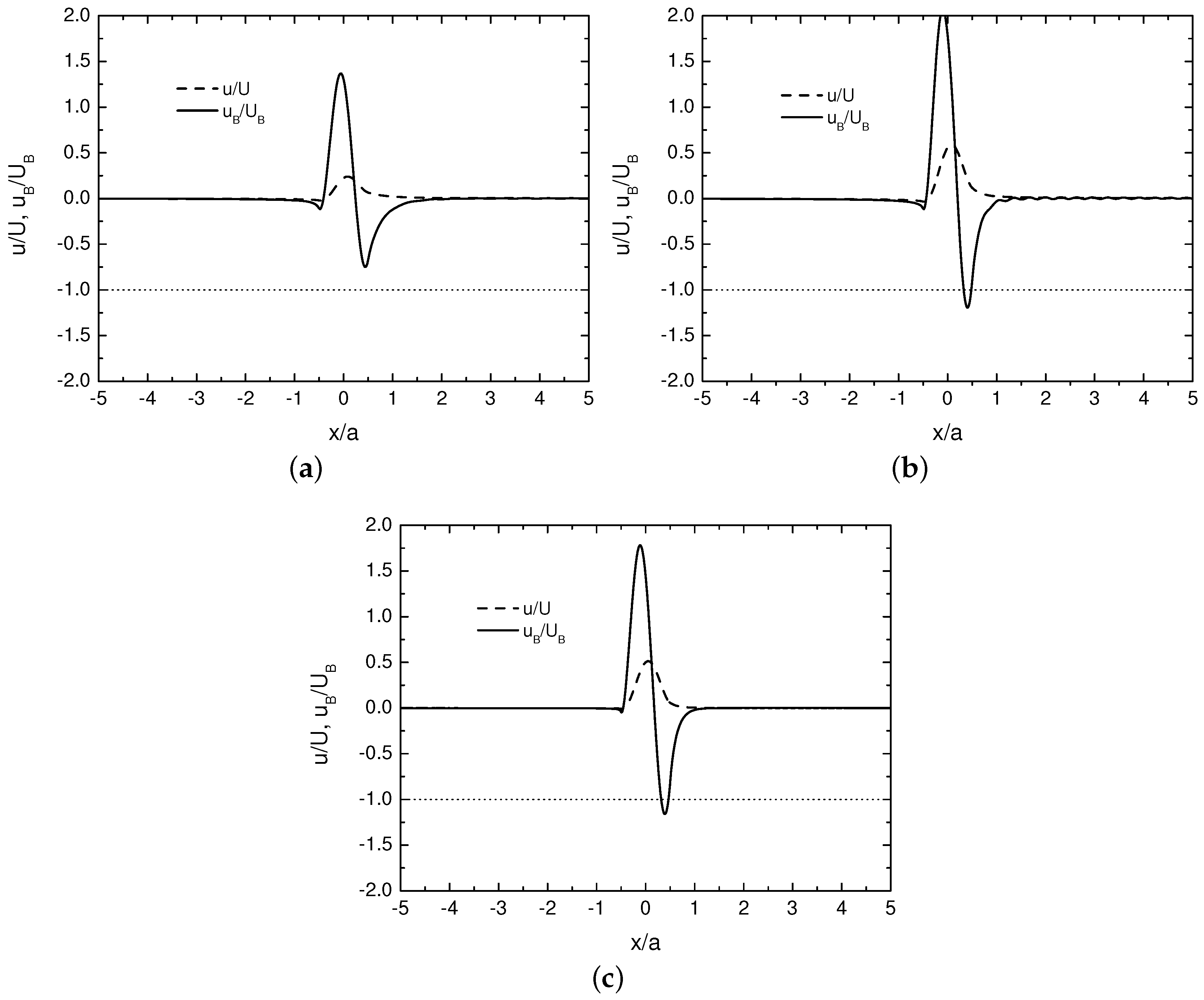
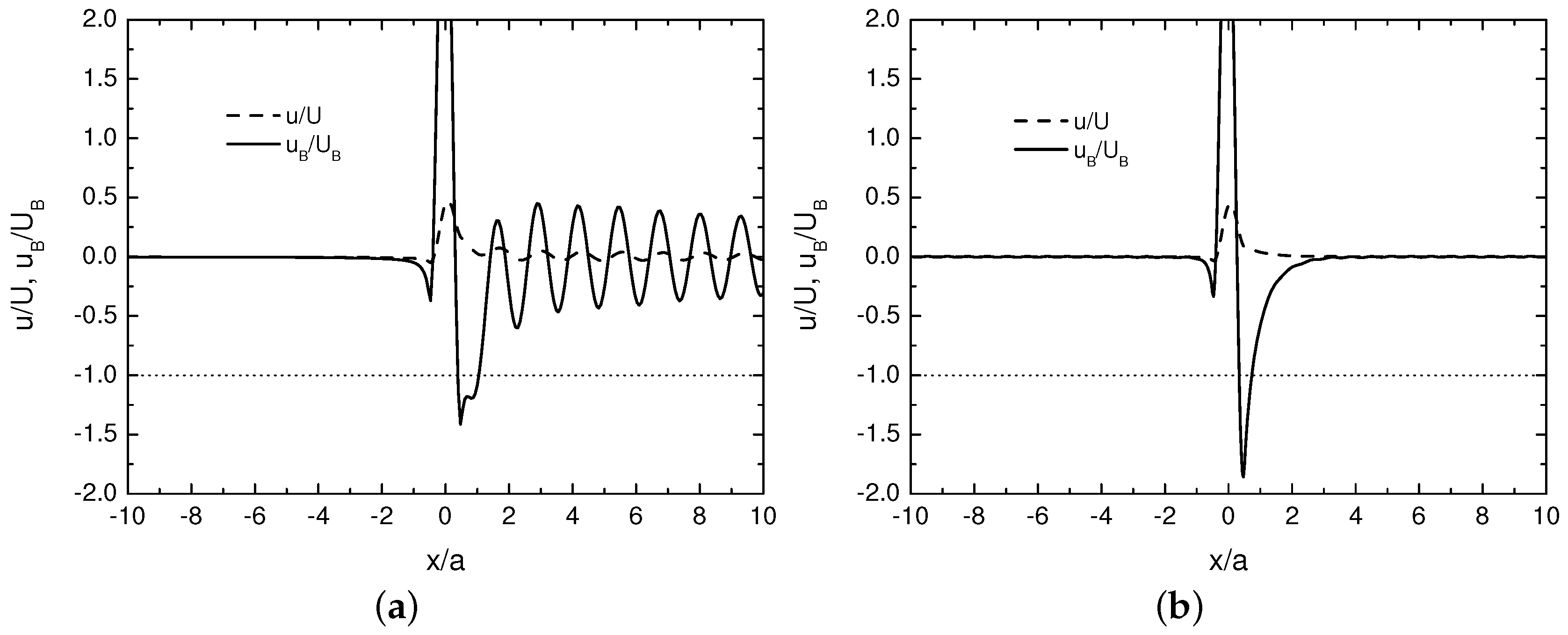
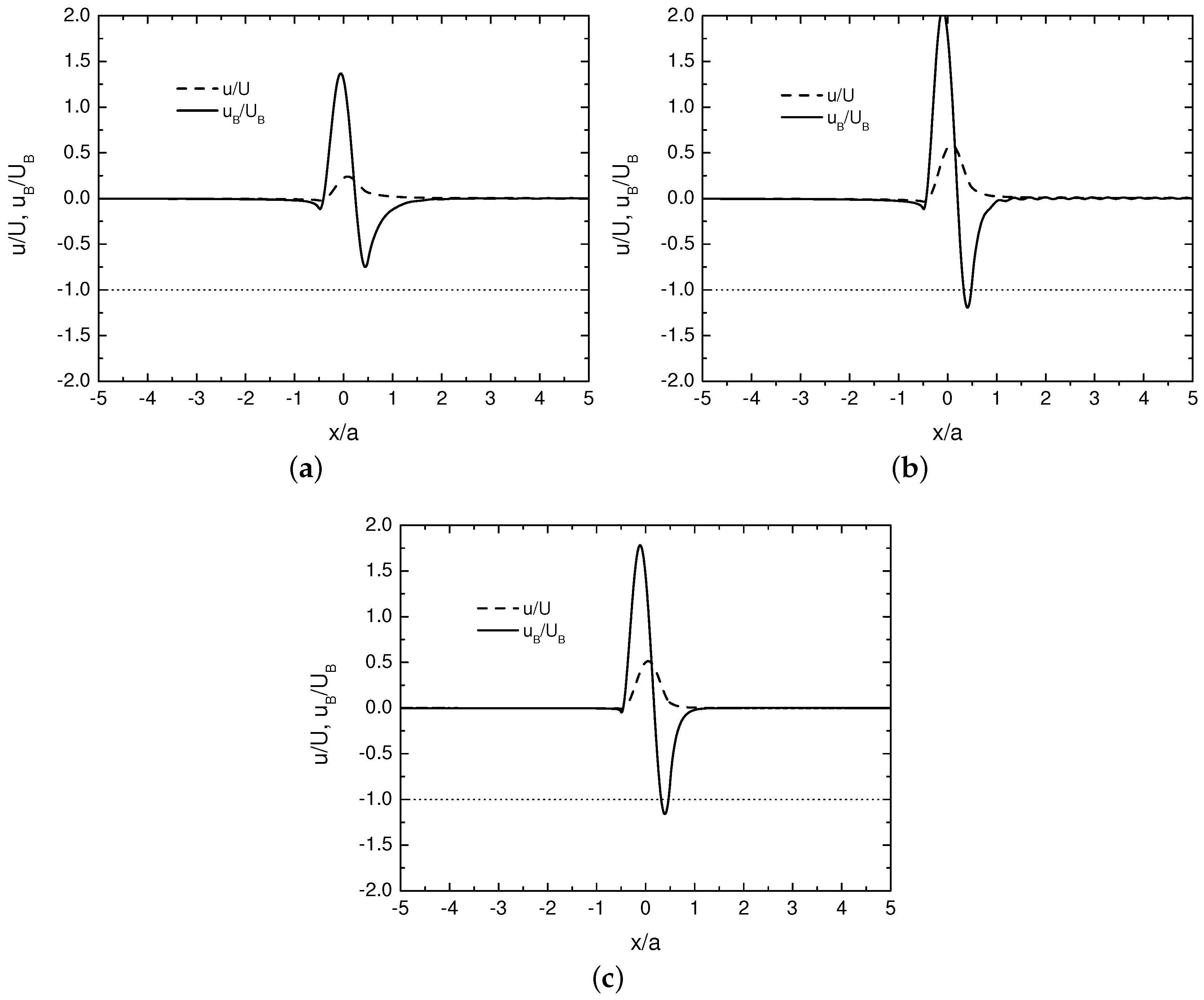
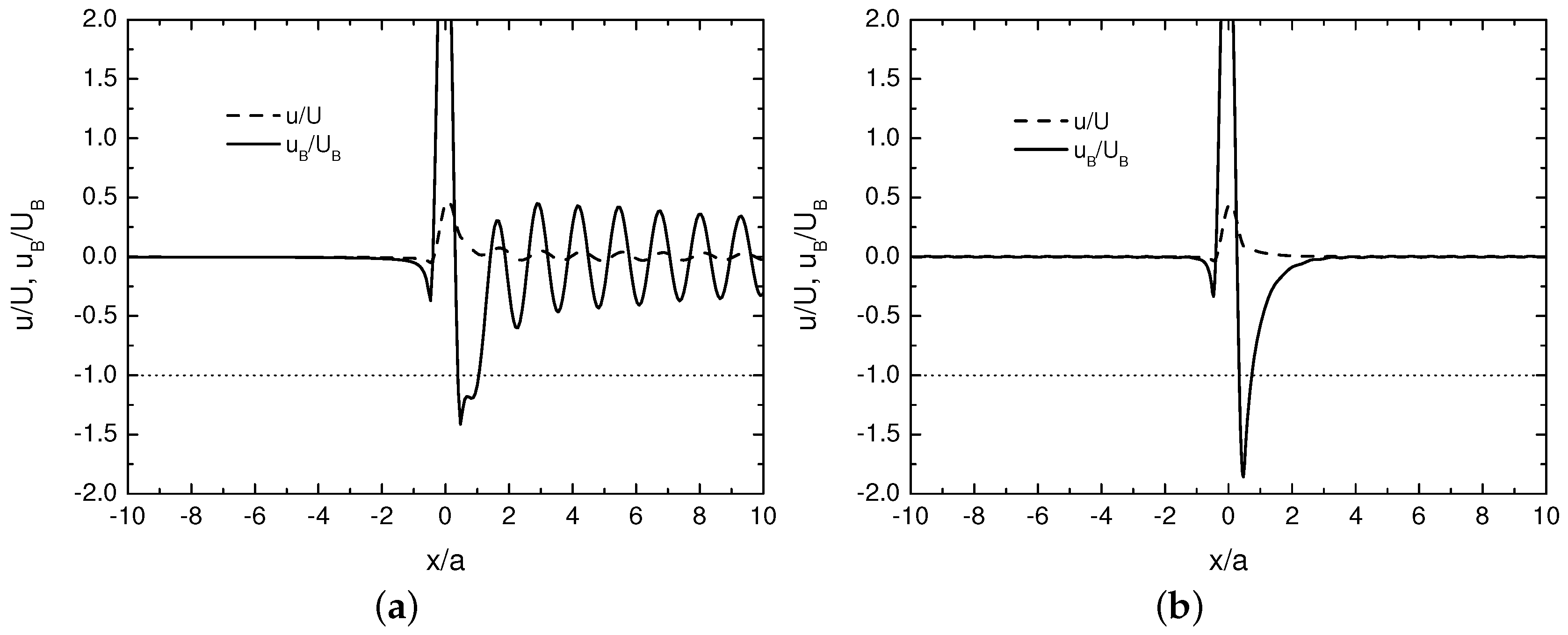
Figure 2 presents
and
(the normalized streamwise velocity perturbations outside and inside the surface layer, respectively) from the present model, for the cases analysed in more detail by V04. It should be noted that
and
correspond to flow stagnation outside and inside the surface layer, respectively.
The results in
Figure 2a were calculated for
and
, corresponding, according to V04, to a situation with trapped lee waves (although of relatively modest amplitude, at least in terms of their streamwise velocity perturbation; see their Figure 4), but no rotors. It can be seen that both outside and inside the surface layer, the velocity perturbation displays a maximum (much amplified for
with respect to
), centred roughly over the hill. Inside the surface layer, where this maximum is slightly displaced upstream, it is followed by a minimum downstream of the hill, but no stagnation is produced anywhere.
Figure 2b shows results for the situation with
and
, which according to V04 corresponds to a case with rotors, displayed in his Figure 5. While in that figure, there is a very strong acceleration of the flow near the ground downstream of the hill and a very pronounced pattern of trapped lee waves with several stagnation points near the surface, the flow pattern from the present model is quite different. Essentially, the velocity perturbation behaves qualitatively similarly to that in
Figure 2a, but with a larger amplitude, with amplification of the maximum over the hill and intensification of the downstream minimum, which now is sufficient to induce flow stagnation inside the surface layer, but only once.
shows a very weak trapped lee wave oscillation, which is consistent with the weakness of this flow component inferred from the inviscid results of
Figure 1a,b.
This suggests that the trapped lee wave shown in Figure 5 of V04 is highly nonlinear and not directly forced by the orography, unlike assumed in the present model. The relatively modest effect of the surface layer on the outer flow appears to be insufficient to force such a wave. However, it must be recognized that the behaviour of
in the present model makes sense physically: the flow deceleration zone downstream of the hill is due to the effect of friction, corresponding to an incipient flow separation bubble. An upstream migration of the velocity perturbation maximum and a deepening of the velocity perturbation minimum downstream of the hill (which are attenuated, but qualitatively similar, versions of the processes produced by the present model) can be seen, for example, in Figure 3 of Smith [
19] or Figure 5 of Jiang et al. [
22]. It might be argued that although the present model does not faithfully reproduce the flow structure produced by the numerical simulations directly, the flow stagnation it predicts might act as an indirect trigger for the trapped lee waves and, hence, for the rotors.
Figure 2c shows model results for
and
, which in V04 corresponds to a situation with a hydraulic jump (his Figure 8). The model results differ relatively little from those displayed in
Figure 2b, but substantially from those of V04. The maximum in the velocity perturbation over the hill has decreased relative to
Figure 2b, but the minimum remains equally low, corresponding to flow stagnation. The very weak trapped lee wave pattern that was barely discernible in
Figure 2b is now absent. This contrasts with the strong downslope wind that can be found near the surface in the numerical simulations. Note, however, that downstream of the hydraulic jump, the flow almost stagnates in those simulations, and the same happens a short distance above the top of the hill.
The cases analysed in detail by V04, mentioned above, are rather close to the threshold conditions for the occurrence of rotors in parameter space.
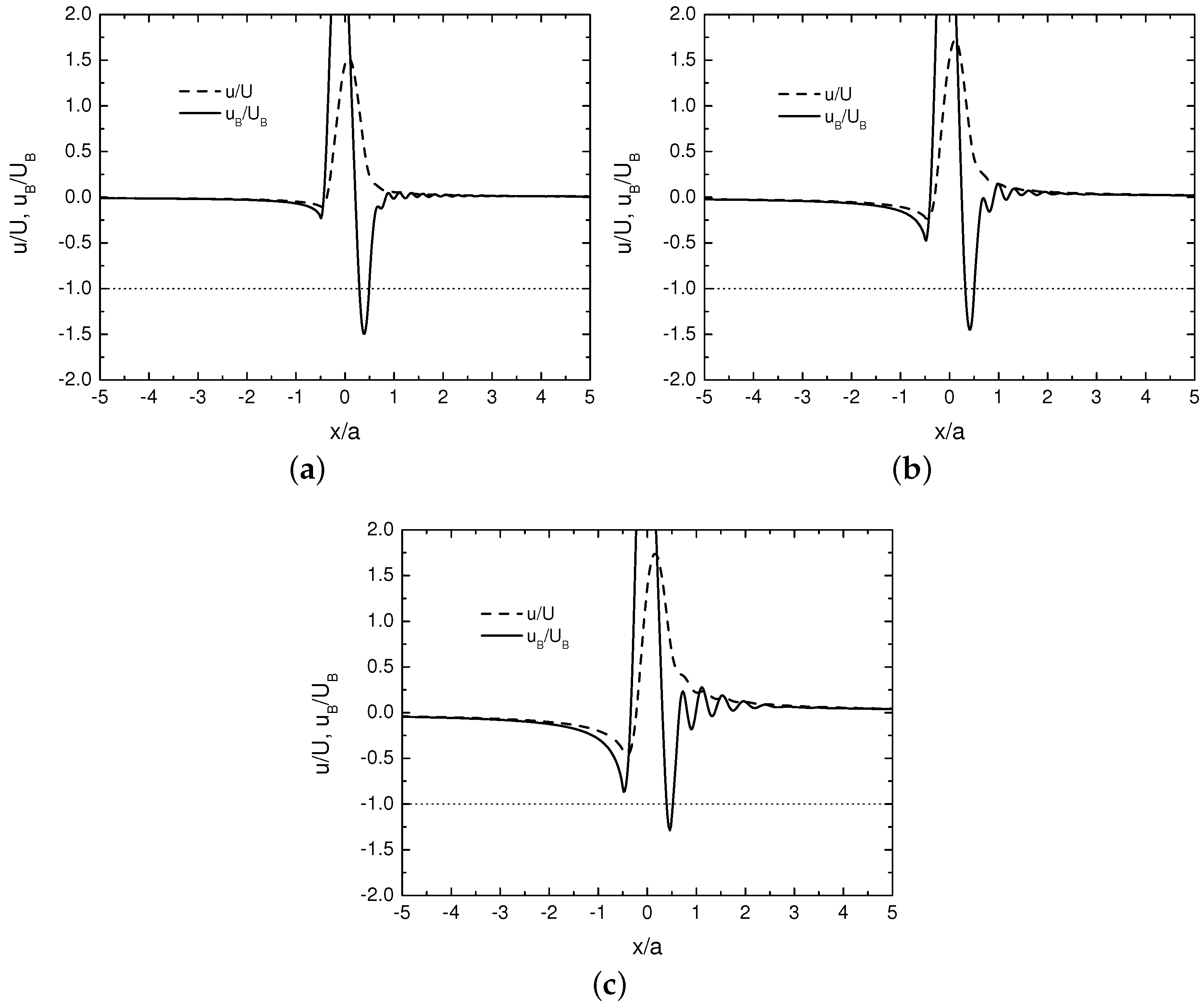
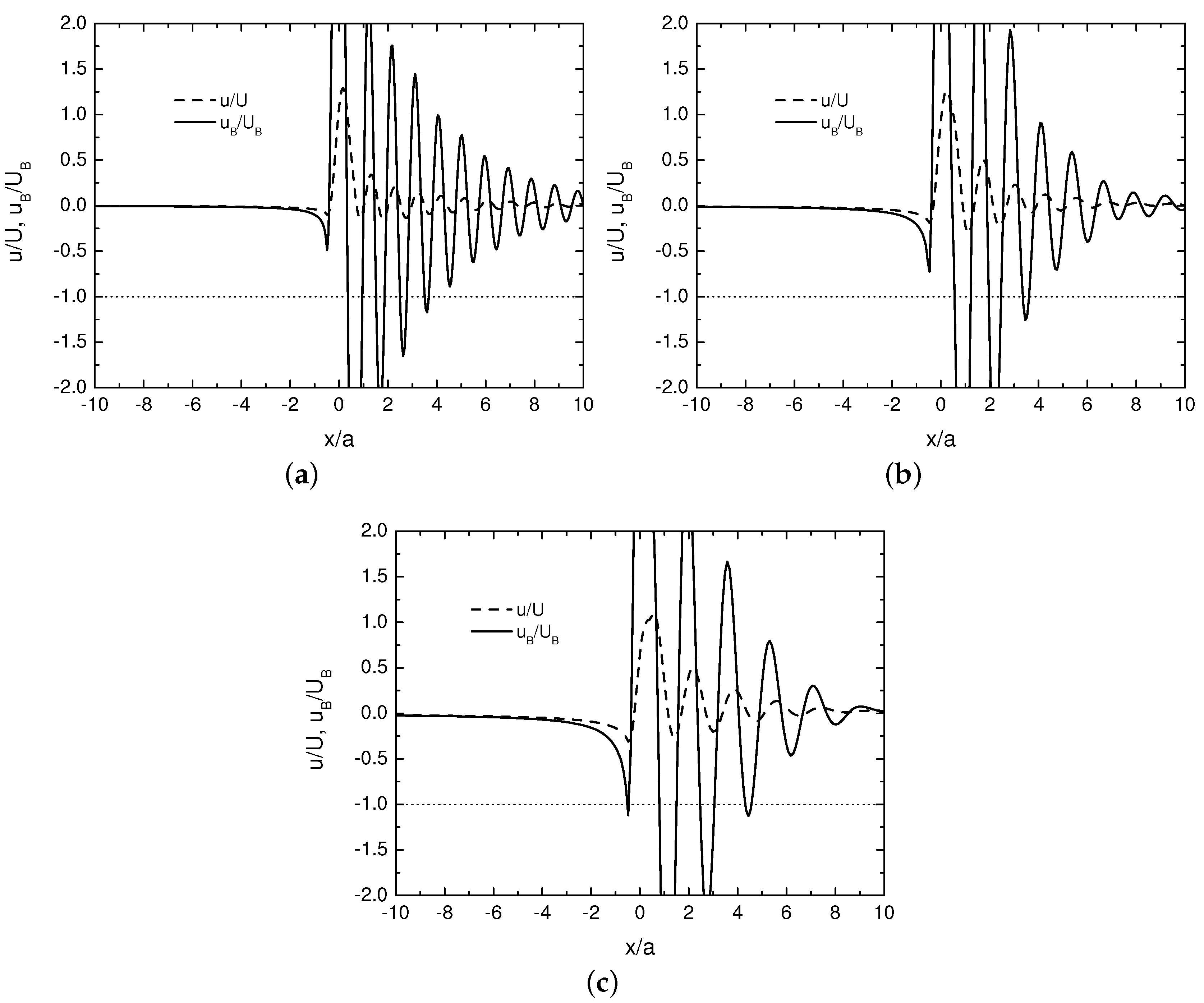
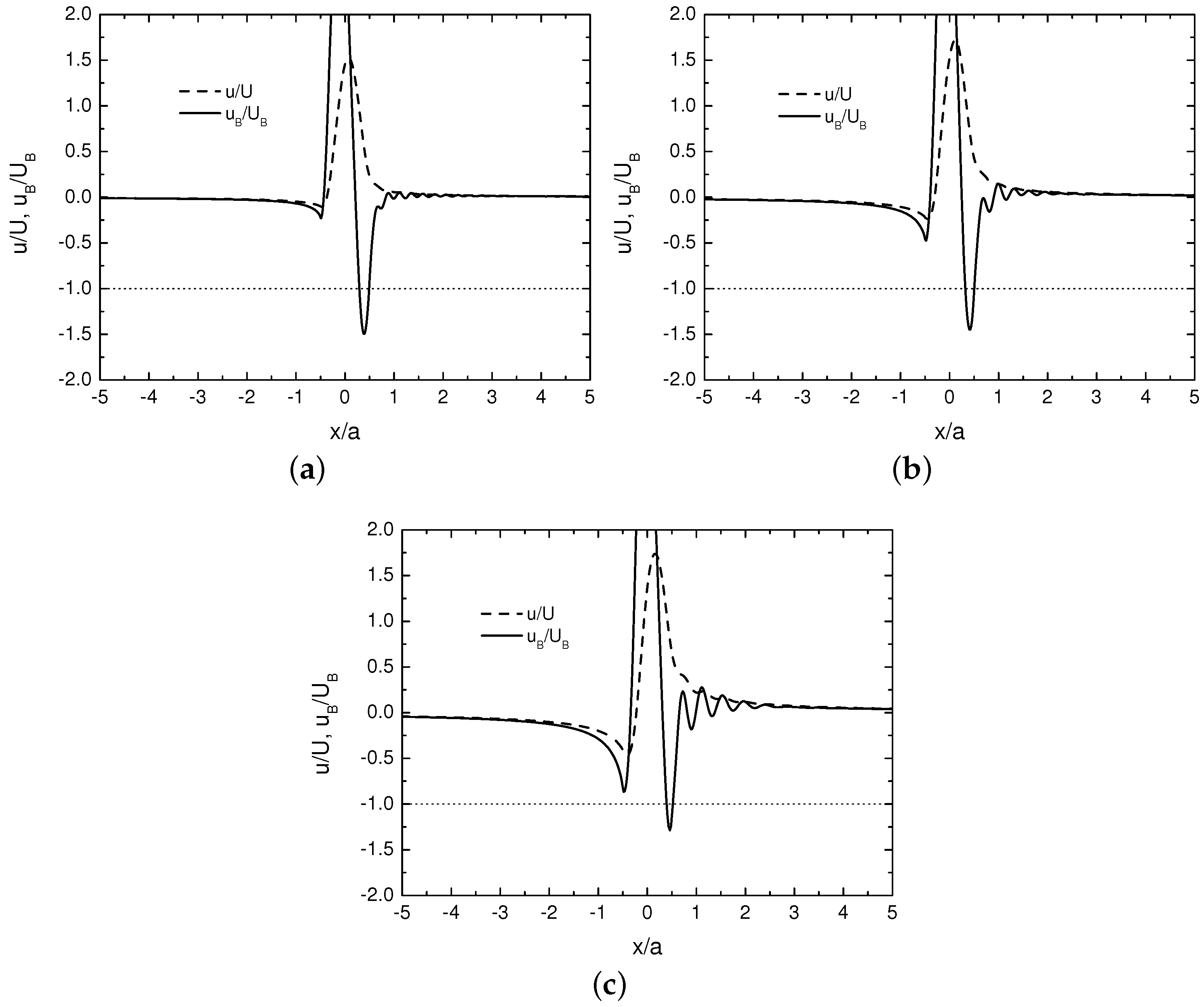
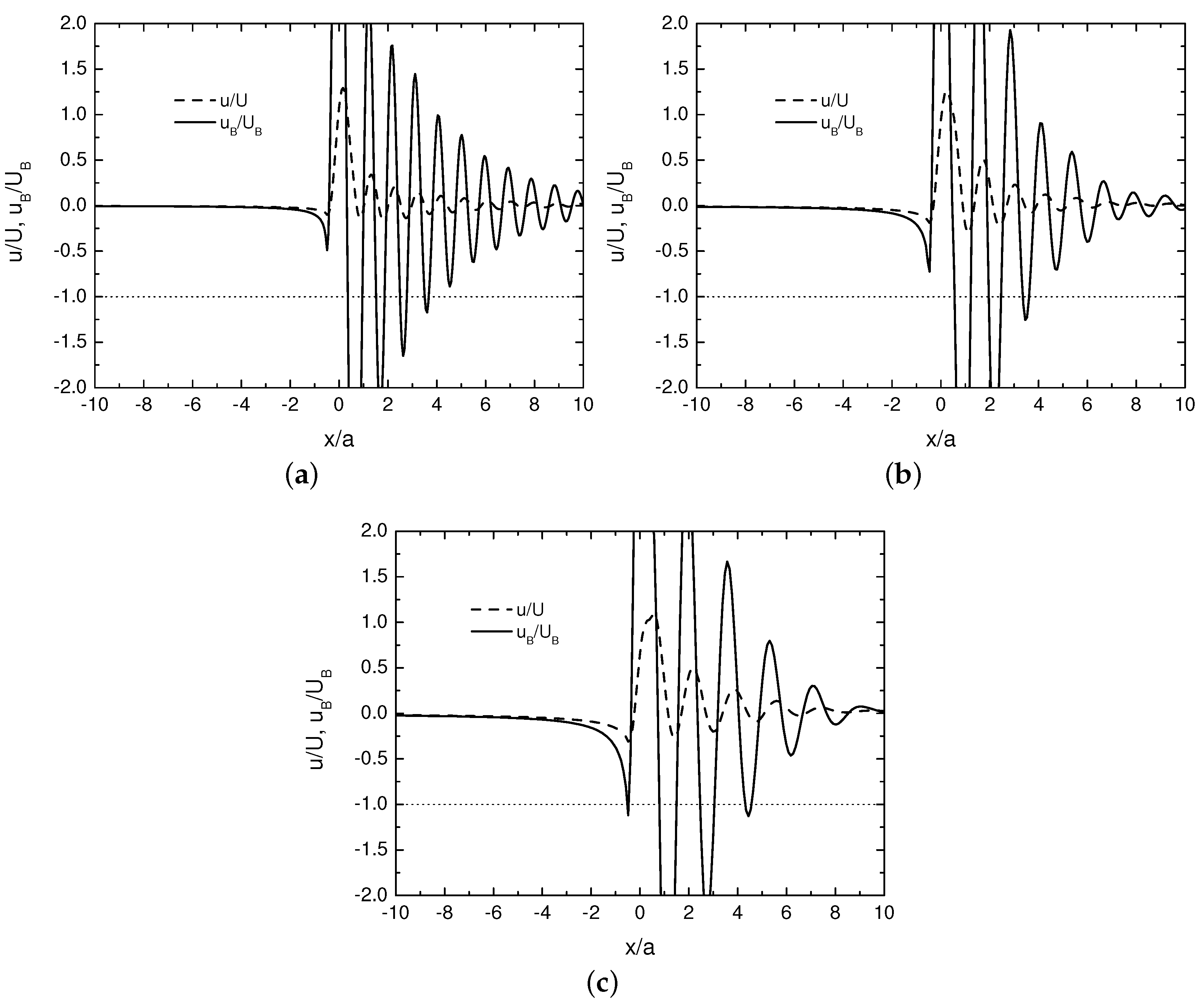
Figure 3 shows results where flow stagnation is fulfilled by a wider margin, at least according to the present model.
In
Figure 3, it is assumed that
. In
Figure 3a,
; in
Figure 3b,
; and in
Figure 3c,
. Perhaps the main difference relative to the results presented in
Figure 2 is that the maximum of the velocity perturbation over the hill is substantially increased, both outside and inside the surface layer, and the minimum downstream of the hill is also more pronounced. Additionally, there is a clearly noticeable (though spatially attenuated) trapped lee wave signature downstream of the hill (detectable only in
) and also a minimum of the velocity perturbation upstream of the hill. Both of these features are especially salient in
Figure 3b, for
. However, in all cases (as in
Figure 2), the signature of non-trapped waves (with velocity perturbations confined to the vicinity of the hill) are largely dominant with respect to the signature of trapped lee waves.
3.3. Numerical Simulations of Sheridan and Vosper (2006)
SV06 performed numerical simulations essentially similar to those of V04, except that
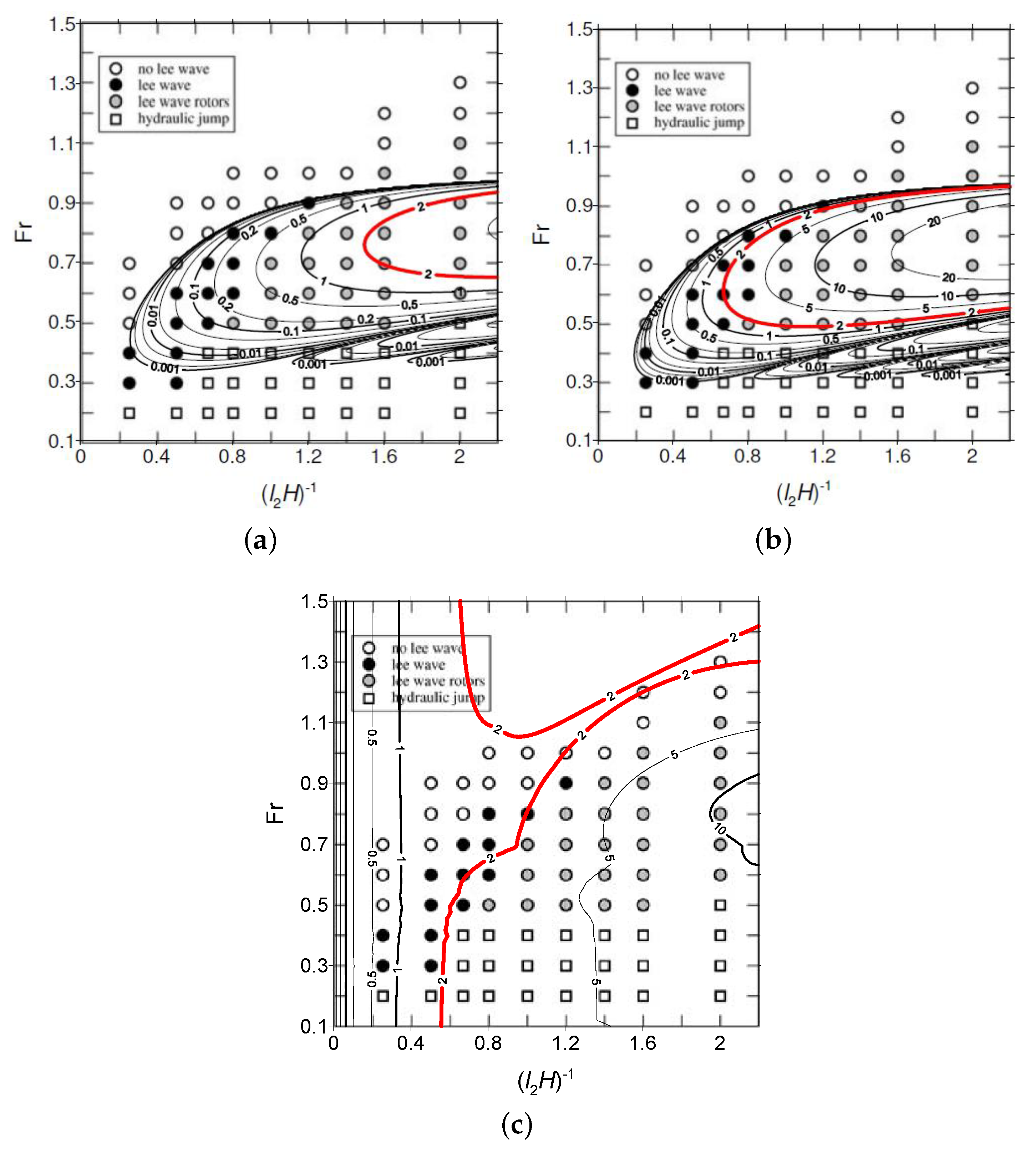
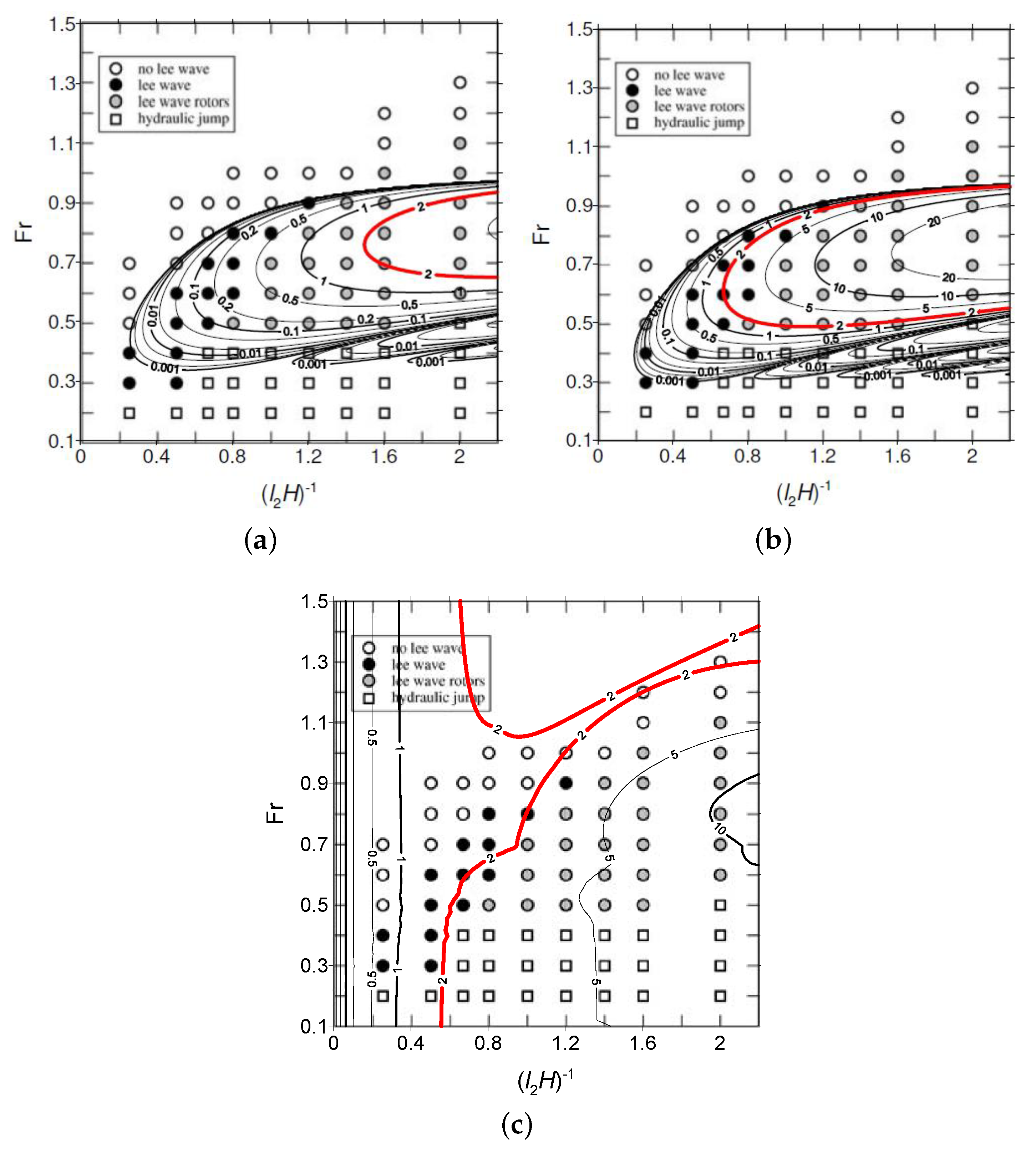
(i.e., more non-hydrostatic flow) was assumed, to produce an analogous regime diagram (their Figure 4).
calculated from the present model is superimposed on this regime diagram in
Figure 4. As in
Figure 1,
Figure 4a corresponds to results from the inviscid model given by Equation (
25),
Figure 4b to the improved model given by Equation (
26) and
Figure 4c to the full model.
In this case, Equation (
25) still underestimates very substantially the region of parameter space where
is larger than two, but the contour of two appears in the graph, as that quantity slightly exceeds this value (see
Figure 4a). The improved model (Equation (
26)) does a reasonably good job of predicting the region of parameter space where rotors occur (
Figure 4b), but slightly underestimates its range, especially for the lowest and highest values of
. This better agreement than in
Figure 1b occurs largely due to the fortuitous fact that the region where flow stagnation is more likely corresponds to trapped lee wave resonant wavenumbers that do not coincide with the zeros of the Fourier transform of
. Mathematically, the reason for this is the following: the dimensionless resonant wavenumber
is only a function of
and
(not
) (see Equation (
22) of TAM13). Hence, it takes the same values as in V04. However, this wavenumber, as it enters in Equation (
28), is normalized instead by
a. This means that
is smaller in SV06, being centred in a part of the normalized Fourier transform of Equation (
28) mostly to the left of the existing zeros (cf. Figure 14 of V04). What this means physically is simply that the forcing a narrower hill provides at the resonant wavenumbers (which tend to be short) is stronger than the forcing provided at the same wavenumbers by a wider hill.
Figure 4c shows results from the full model, where it can be seen that the region of parameter space where
encompasses all cases with rotors observed in the numerical simulations, as well as most of the cases with hydraulic jumps (as in the situation with
). The agreement is, however, not as good as in
Figure 1, since this region includes some cases classified by SV06 as simply corresponding to trapped lee waves (without rotors) or even no trapped lee waves, particularly for the highest values of
. The extent of the region of parameter space where flow stagnation is detected in the numerical simulations appears to be slightly overestimated by the full model, although it is impossible to check whether the separate region with the highest values of
, at the top of the graph, is correct, due to the lack of simulations covering that part of the parameter space.
Figure 5 shows the structure of the normalized velocity perturbation in the downstream direction outside and inside the surface layer. SV06 only analyse in more detail two idealized cases: one dominated by rotors, with
and
(their Figure 3a) and another one dominated by a hydraulic jump, with
and
(their Figure 3b).
Figure 5a,b shows the flow perturbations associated with each of these two cases, respectively, obtained from the present model.
Clearly, in
Figure 5a, there is a strong signature of trapped lee waves (especially inside, but also outside, the surface layer). In this sense the model behaviour differs from that displayed in
Figure 2b, but is consistent with the behaviour of the inviscid and improved models in
Figure 4. The trapped lee waves are weaker than those displayed in Figure 3a of SV06, since flow stagnation only occurs at the first trough (which seems to be intensified by a non-trapped wave component). Nevertheless, the wavelength is not too different (though slightly smaller) than that seen in Figure 3a of SV06, being roughly
, or equivalently
, against
, or
from SV06. In contrast, in
Figure 5b, corresponding in SV06 to a hydraulic jump, there is a total absence of trapped lee waves and only one stagnation zone downstream of the orography, much as happened in
Figure 1b,c. This is not consistent with the behaviour of the flow perturbation near the ground in the numerical simulations, where Figure 3b of SV06 shows considerable flow acceleration downstream of the mountain, but is perhaps more consistent with the flow higher up, slightly above the top of the hill.
As in
Figure 3,
Figure 6 presents the velocity perturbation predicted by the model for a parameter combination where flow stagnation is predicted to be fulfilled by a wider margin. The values of
and
are the same assumed in
Figure 3. In these cases, there is an overwhelmingly dominant trapped lee wave pattern within the surface layer, leading to flow stagnation in three separate regions downstream of the hill. Therefore, these are cases where the model actually predicts rotors, as usually understood, not just flow stagnation. Interestingly, the flow outside the surface layer never approaches stagnation, showing relatively low nonlinearity (as predicted by the model), in contrast with the strong amplification it undergoes within the surface layer. The wavelength of the trapped lee waves increases from
Figure 6a–c, as this is a strong function of
, and increases as
increases (see Figure 8 of TAM13). In
Figure 6c, for
, the model predicts that flow stagnation occurs even upstream of the hill inside the surface layer.
The main conclusion to take from the above results is that, despite the fact that not only the regime diagram presented by SV06, but also the flow structure associated with rotors and hydraulic jumps bear a strong resemblance to the equivalent results produced by V04, they are much more directly forced by the orography in the former case than in the latter. This is demonstrated by the fact that the present model is able to reproduce the flow structure with greater accuracy and that the improved version of the inviscid model is much more consistent with the regime diagram of SV06 than with that of V04.
3.4. Laboratory Experiments of Knigge et al. (2010)
Finally, KEPE10 considered even more non-hydrostatic and nonlinear flows in their laboratory experiments. In the cases treated by them, it is not possible to obtain figures akin to
Figure 1 or
Figure 4, where uniformly valid results from the present model are superposed on a regime diagram, their Figure 9. Although, as in V04 and SV06, the variable
on the horizontal axis of that figure can be related to a parameter that is accessible to linear theory, i.e.,
, where
is fixed in the experiments, the value of
is not provided for each data point in the regime diagram. Hence, comparisons must be limited to the particular cases analysed in more detail by these authors (their Figures 4–8), where all flow parameters are specified.
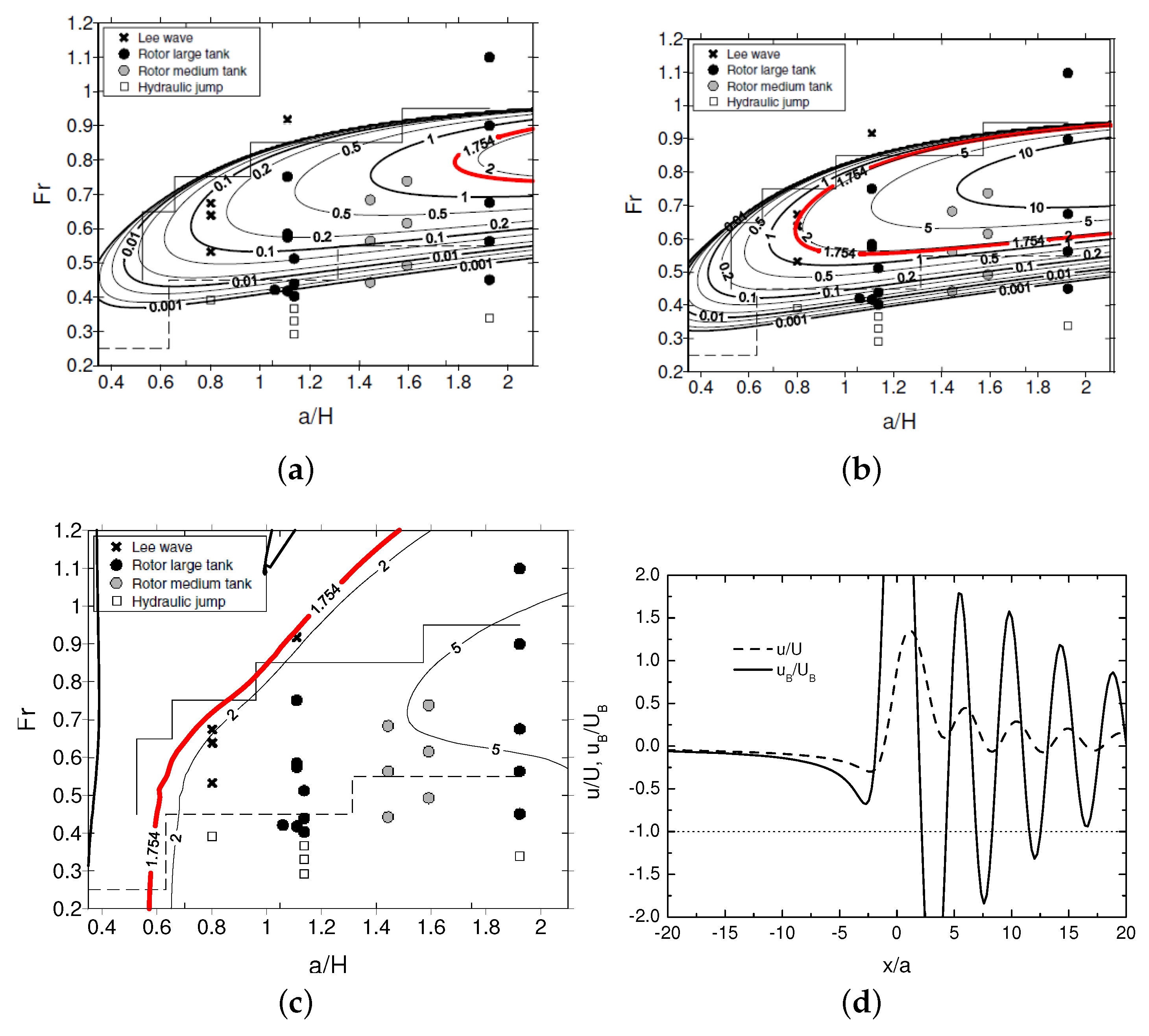
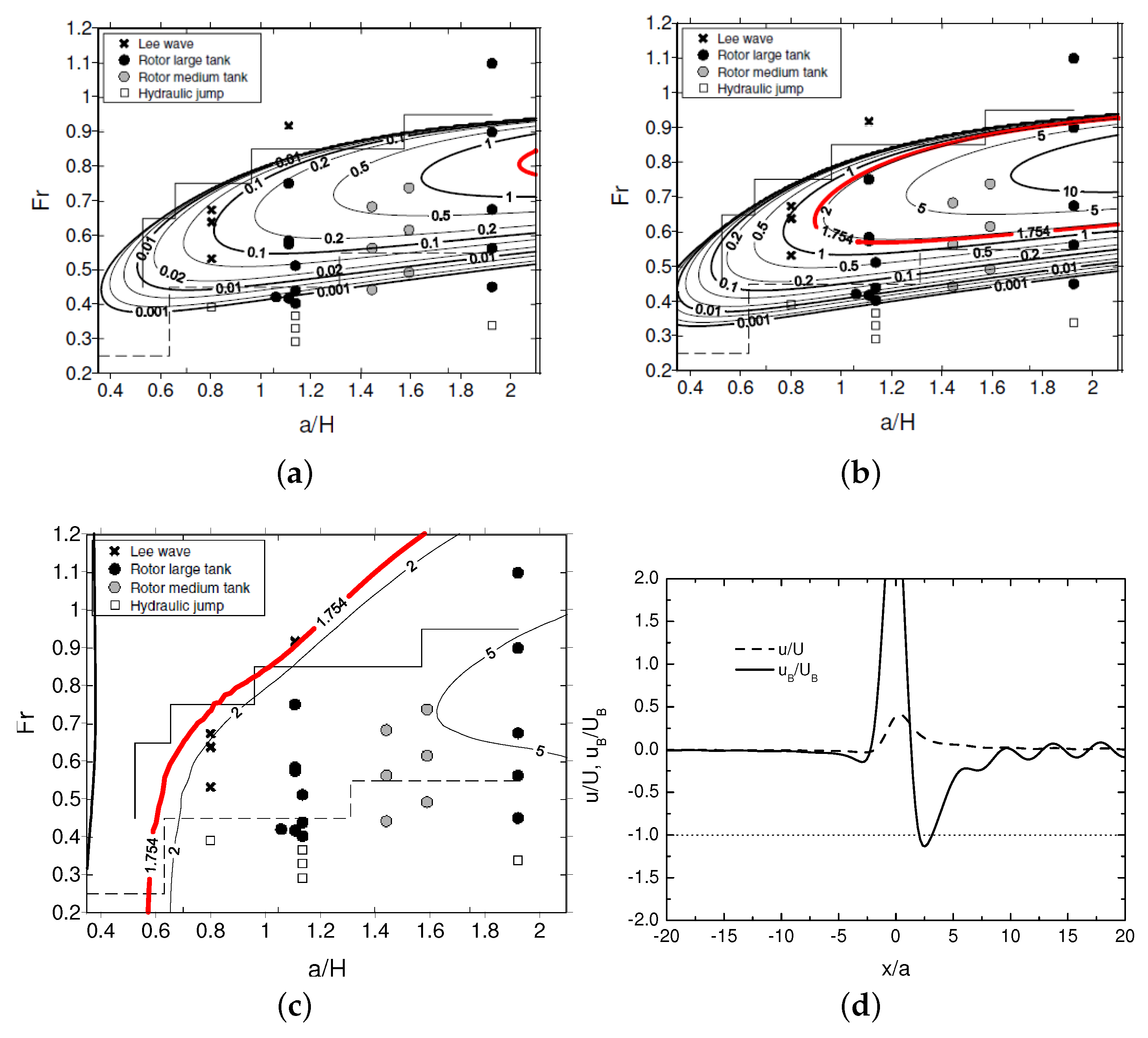
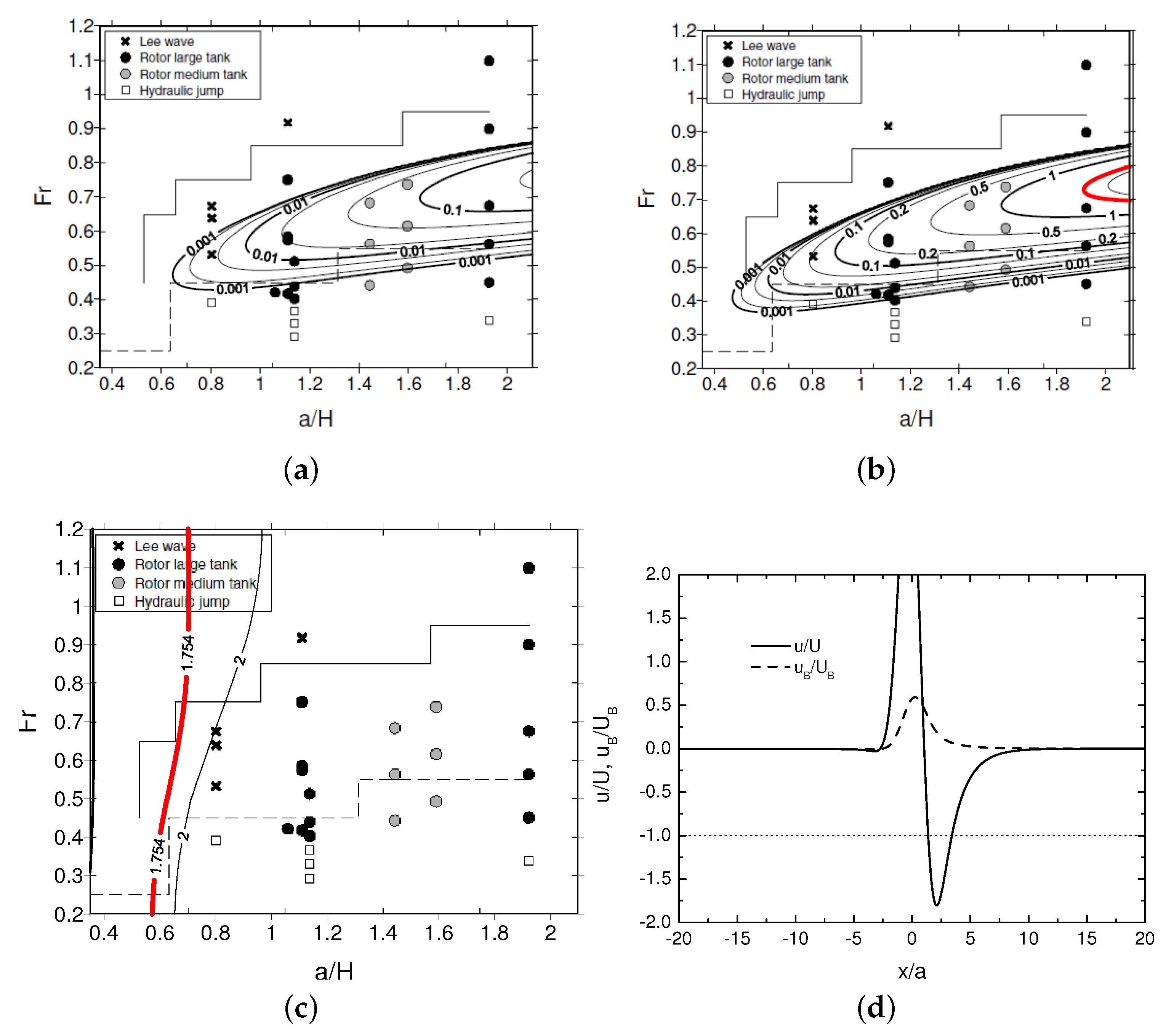
Figure 7 shows results for the case displayed in Figures 4a and 5a of KEPE10, where
(derived from their data as
, given that the inverse of the internal Froude number used by them was
and
),
and
(also derived from their data via
, with
).
Note that, unlike in
Figure 1 and
Figure 4, results from the present model superimposed on the regime diagrams in
Figure 7a–c are only valid for the specific conditions quoted above, not for the full range of
and
. Hence, the essential information contained in the contour plots overlaid on the regime diagrams is whether the point corresponding to those conditions is enclosed by contours where flow stagnation is predicted or not.
Figure 7a shows results from the inviscid model,
Figure 7b from the improved model and
Figure 7c from the full model.
Figure 7d shows the velocity perturbation derived from the full model, for the same specific conditions.
In
Figure 7, it can be seen that both the inviscid and the improved model do not diagnose any flow stagnation, which is consistent with the absence of rotors reported by KEPE10 in this case. The full model, however, marginally predicts flow stagnation, as shown by the fact that the region of parameter space enclosed by the contour of 1.754 contains the point with
and
, albeit at its edge. This is confirmed by the fact that in
Figure 7d, the flow perturbation minimum just exceeds the stagnation limit. The trapped lee waves that can be detected in
are, however, of relatively low amplitude.
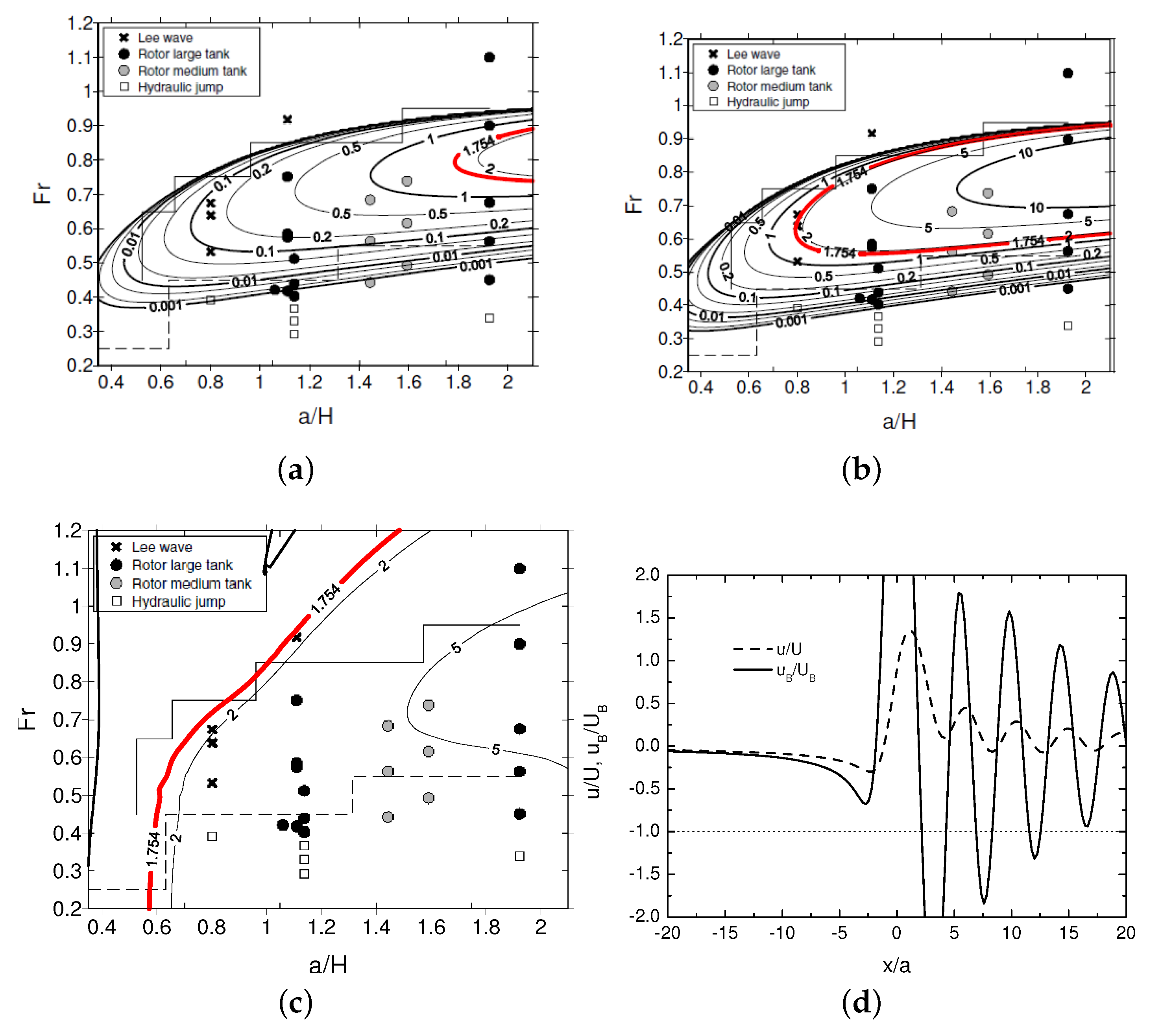
Figure 8 shows similar results, but for the case displayed in Figures 4b, 5b, 6 and 7 of KEPE10, where trapped lee wave rotors were detected. The parameters that can be derived in the same way as described above from their data now take the values:
,
and
. In this case, all versions of the model except the inviscid one (
Figure 8a) diagnose the occurrence of flow stagnation, although for the improved model (
Figure 8b), this occurs by a relatively small margin. Stagnation is exceeded more significantly in the full model (
Figure 8c), as shown by the fact that the point
and
lies well within the contour of 1.754. The flow perturbation is also dominated by a high-amplitude trapped lee wave signature (
Figure 8d), with three zones downstream of the orography where the flow stagnates.
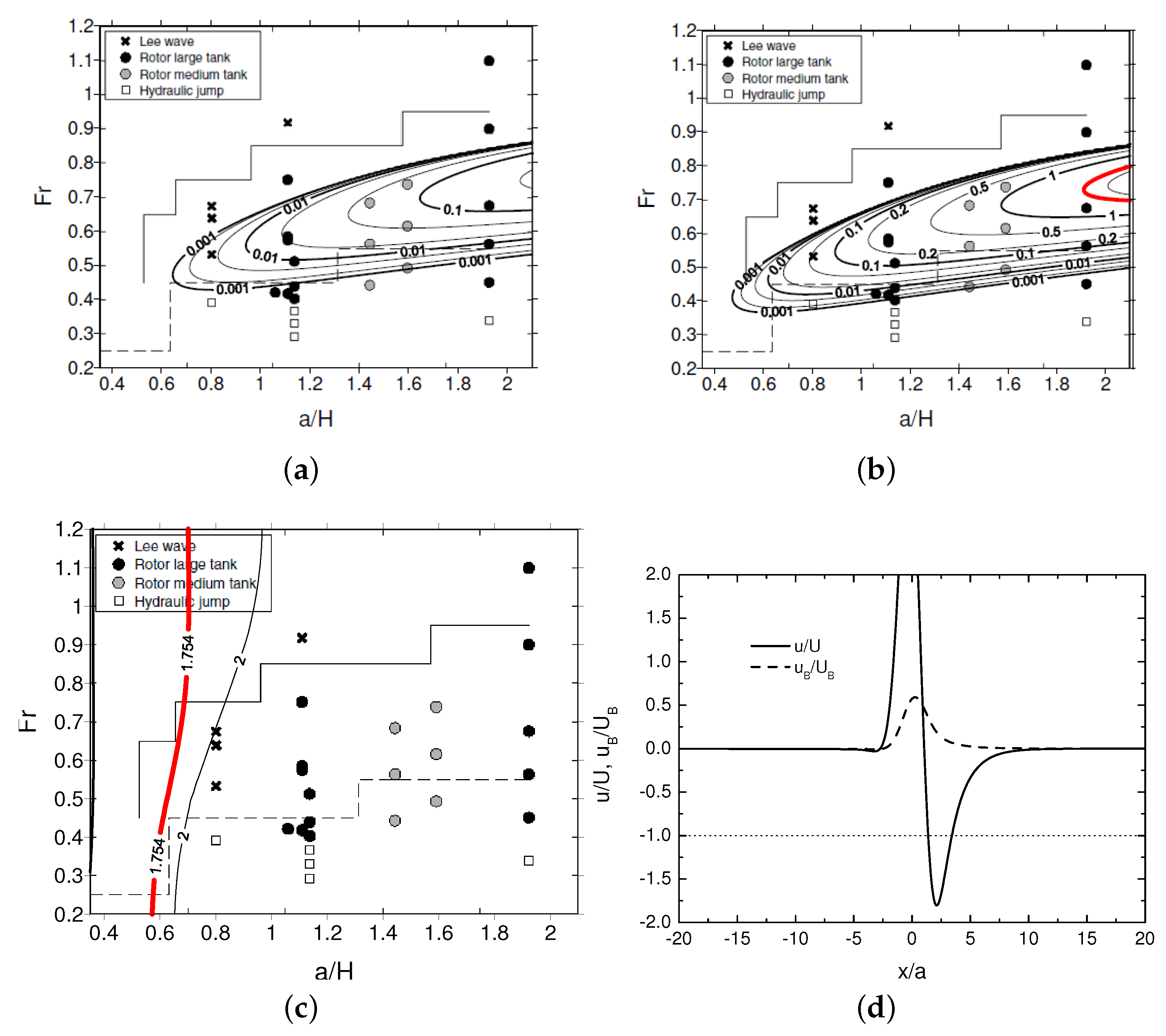
Finally, in
Figure 9, the case displayed in Figure 8 of KEPE10 is analysed, where
,
and
, and a hydraulic jump was detected in the laboratory experiments. Both the inviscid and the improved model do not predict flow stagnation (
Figure 9a,b), but the full model (
Figure 9c) predicts it, again by a wide margin. However, the velocity perturbation (
Figure 9d) does not show any trapped lee wave signature, but rather flow stagnation is achieved as a single zone of flow deceleration that must be caused by non-trapped waves.
The main conclusion to draw from these results is that rotors appear to be, also in this case directly, rather than indirectly, forced, and the full model appears to slightly overestimate the conditions for flow stagnation. However, the comparison of a linear model with these experiments is perhaps more questionable than in the preceding cases, since the laboratory experiments of KEPE10 depart substantially more from the assumptions of linear theory than the numerical simulations of V04 and SV06. Namely, the nonlinearity is stronger ( and , against and in V04 and and in SV06). Additionally, the inversion is thicker (in relative terms) than in the numerical simulations; the velocity boundary layer is thinner and less in equilibrium (since it is only generated by the leading edge of the obstacle); reflection of propagating mountain waves in the layer further away from the hill could not be totally prevented; and the flow structures were diagnosed subjectively (see KEPE10).
Nevertheless, it is remarkable that, even in these far-from-ideal conditions, the fields of
presented in
Figure 7,
Figure 8 and
Figure 9 still show shapes consistent with the zones in parameter space where different types of flow structures are detected. The contours of this quantity in
Figure 7b,
Figure 8b and
Figure 9b display roughly the same shape as the region in parameter space with rotors, and in
Figure 7c and
Figure 8c, the contours roughly follow the regions of parameter space containing rotors or hydraulic jumps.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}