

Lightning Return Stroke Positioning Method Based on CWT Narrowband Feature Extraction


Abstract
1. Introduction
2. Methods
2.1. Fundamental Theories of CWT
2.2. Lightning Positioning by the TOA Method
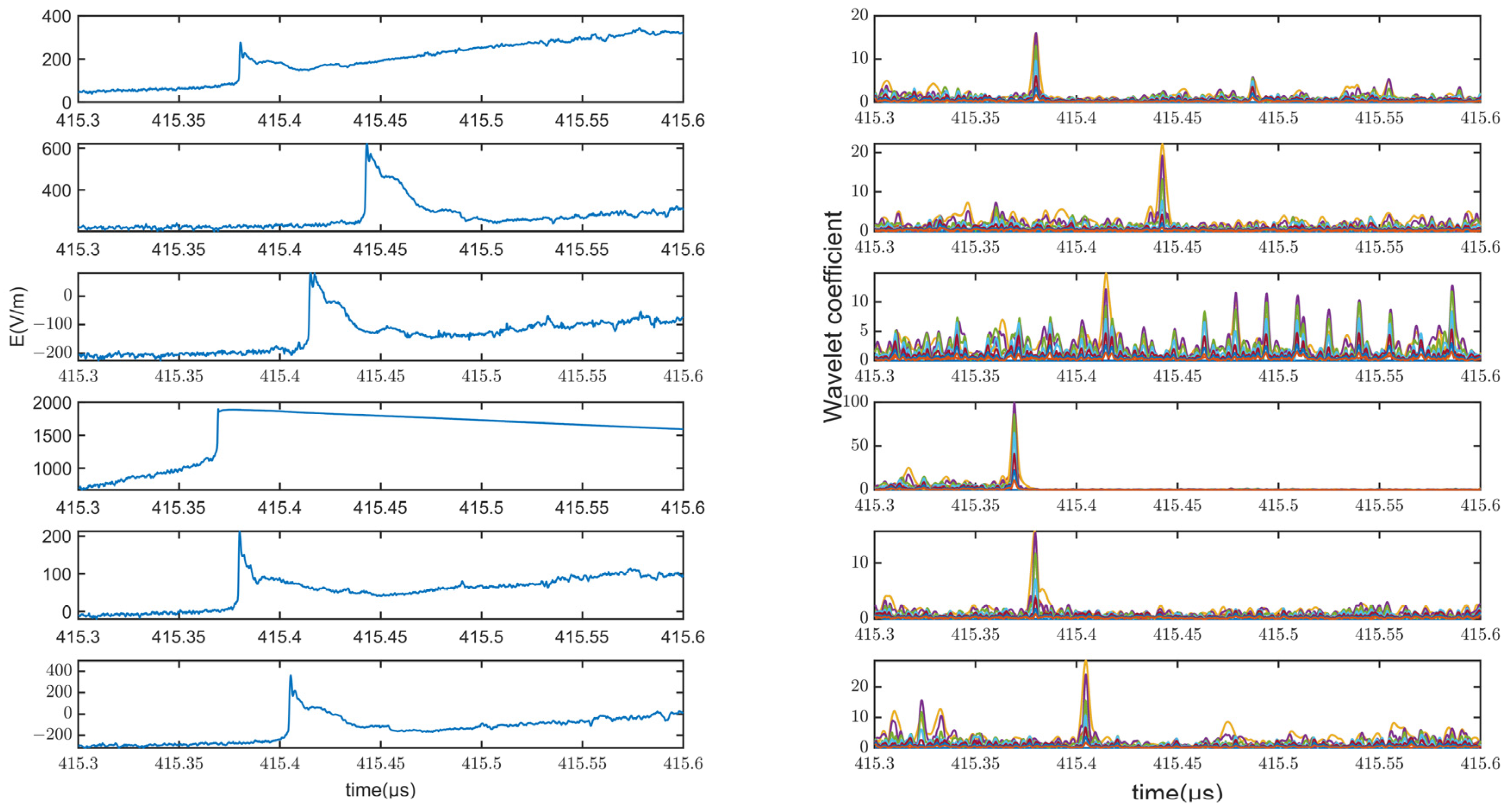
2.3. Extraction of Arrival Times of Lightning Pulses by CWT
2.4. Sites and Data
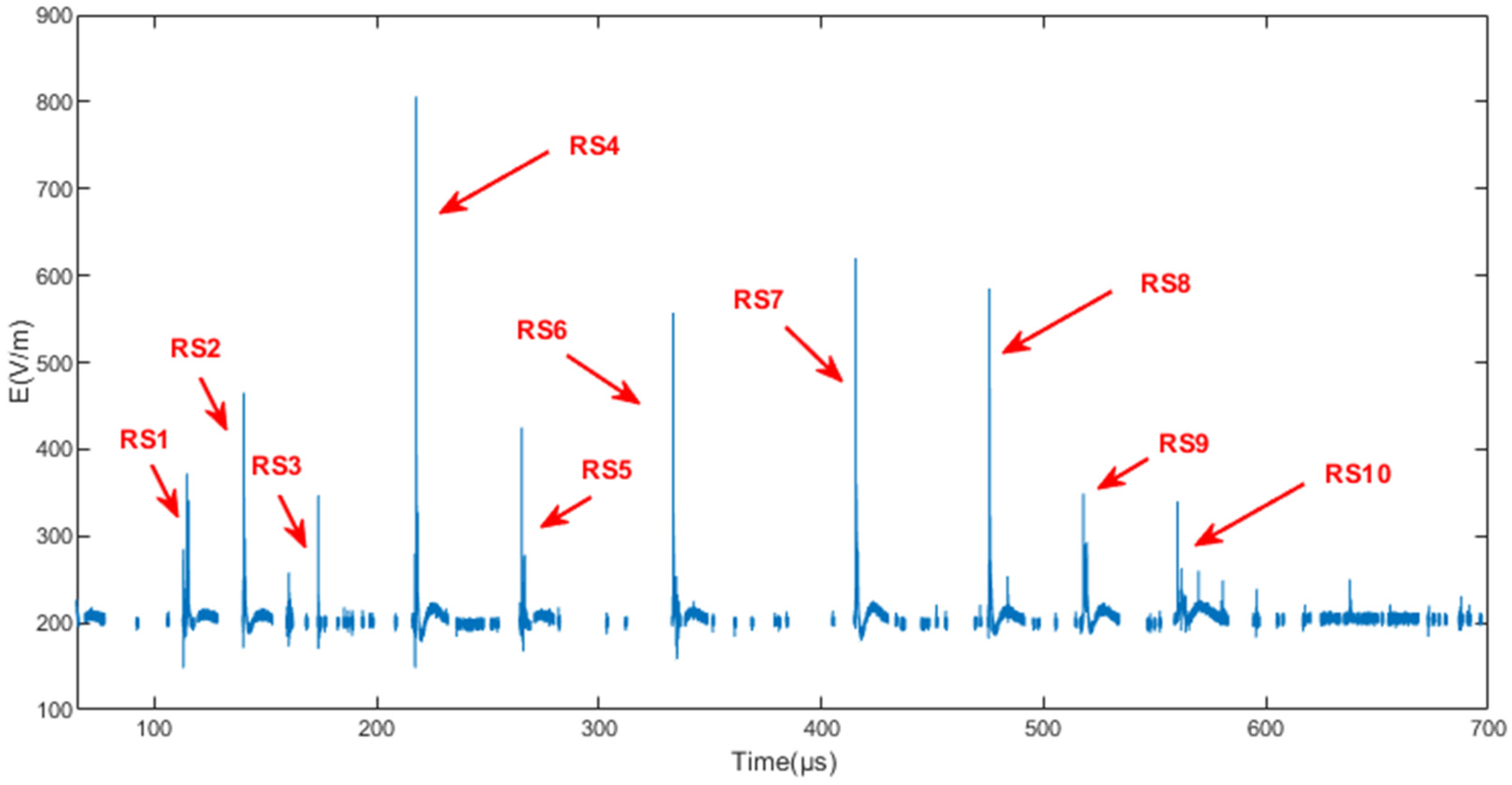
2.4.1. Practical Measured Data
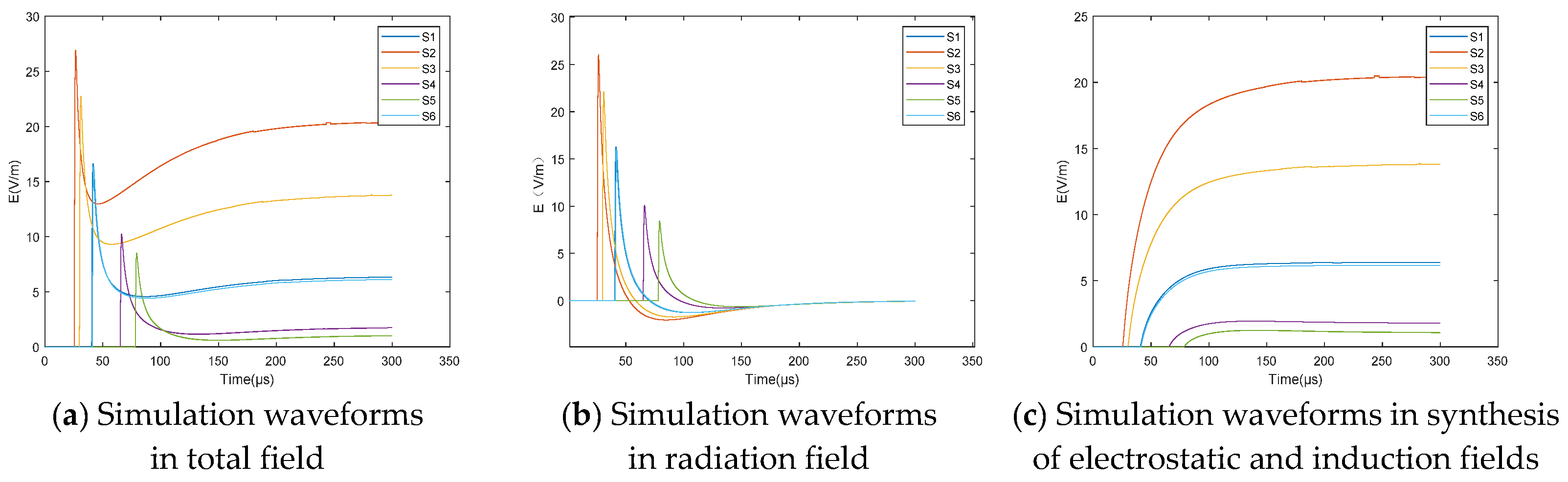
2.4.2. Simulation Data
3. Results
3.1. Horizontal Positioning Results of Simulation Data
3.2. Horizontal Positioning Results of Practical Artificially Triggered Lightning Data
4. Discussion
4.1. Effects of Three Electric Field Components for Positioning Accuracy on Peak Method
4.2. Effects of Three Electric Field Components for Positioning Accuracy on CWT Method
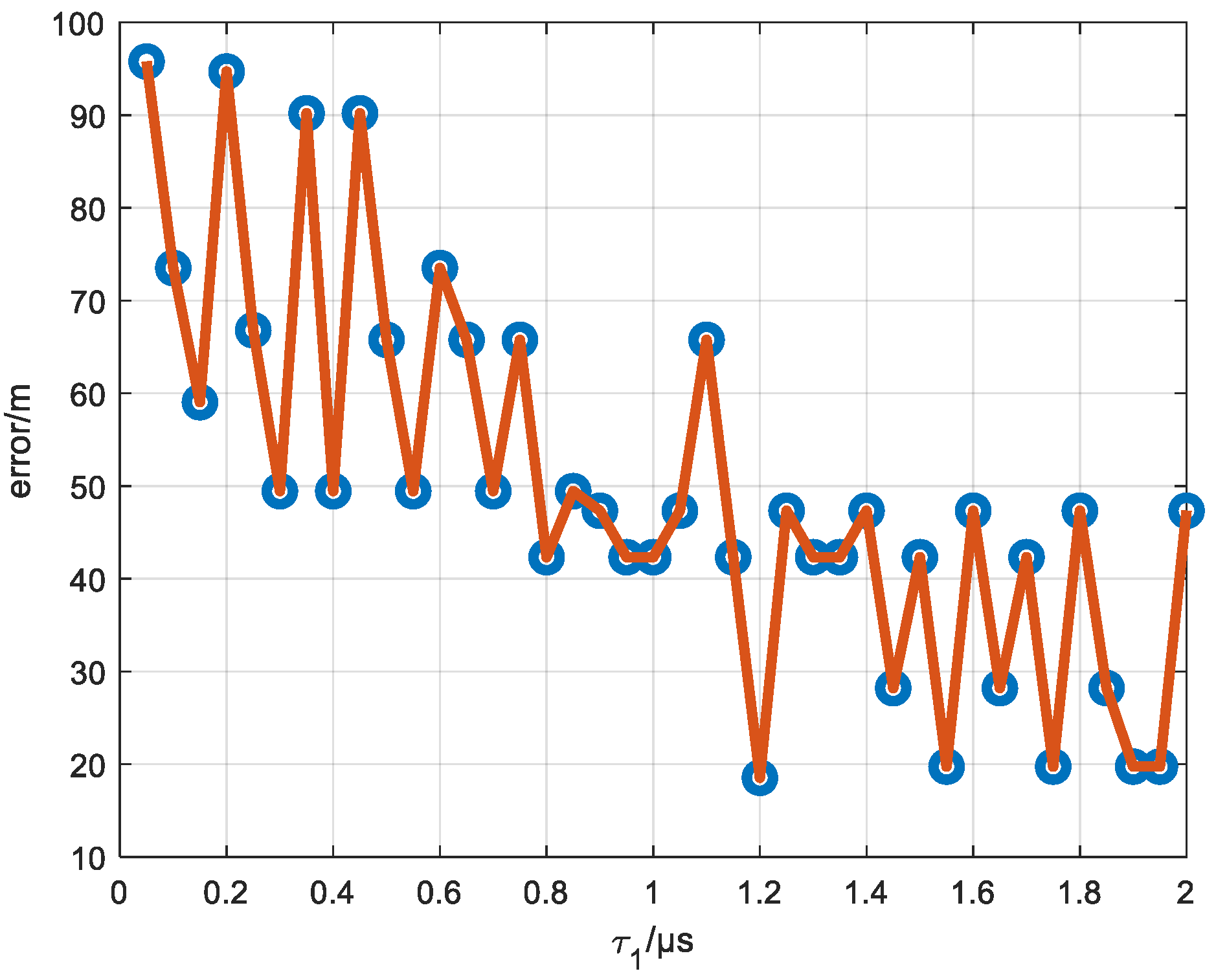
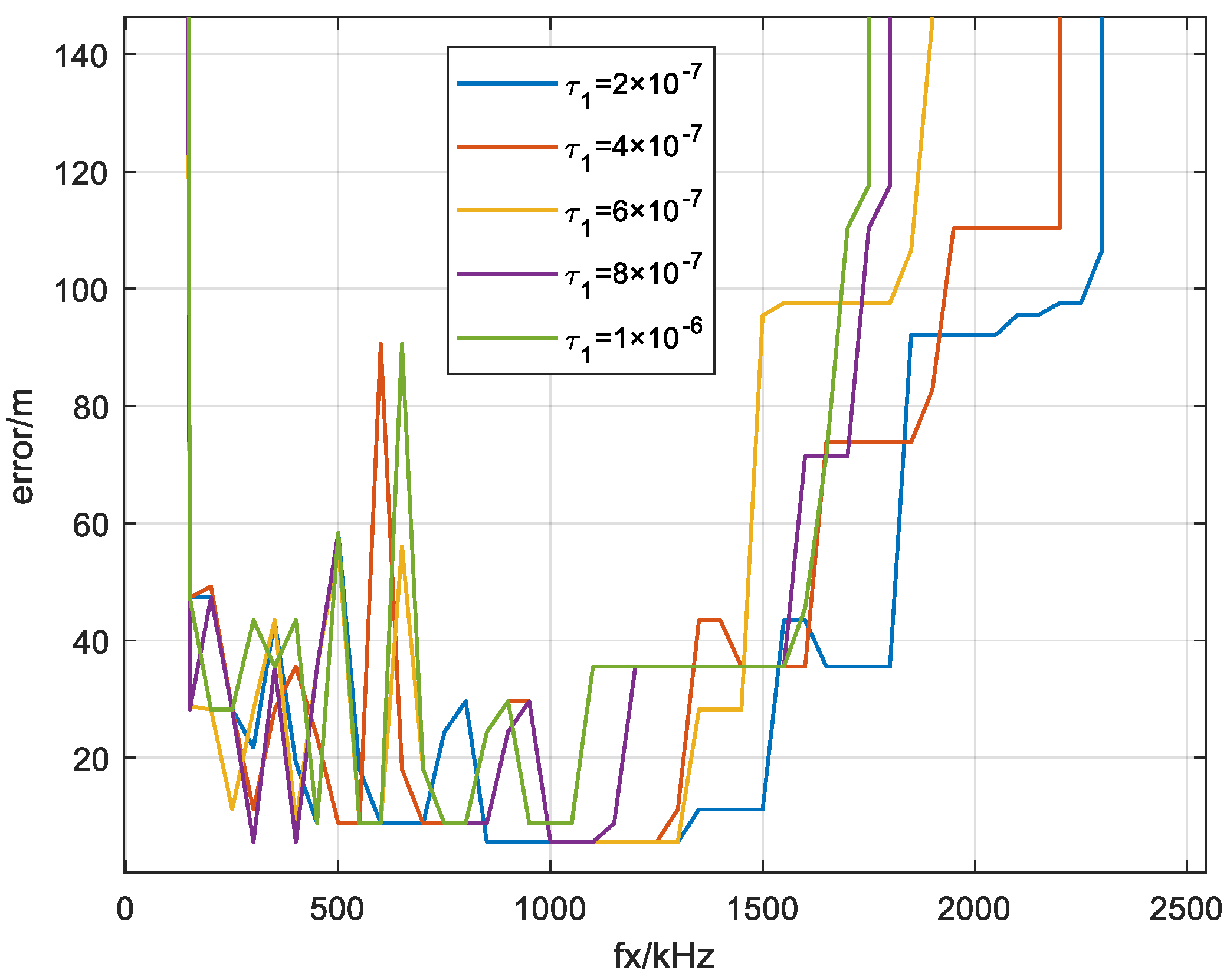
4.3. Effects of Current Waveform Profile on Positioning Accuracy
4.3.1. Effects of Current Waveform Profile on Positioning Accuracy of Peak Value Method
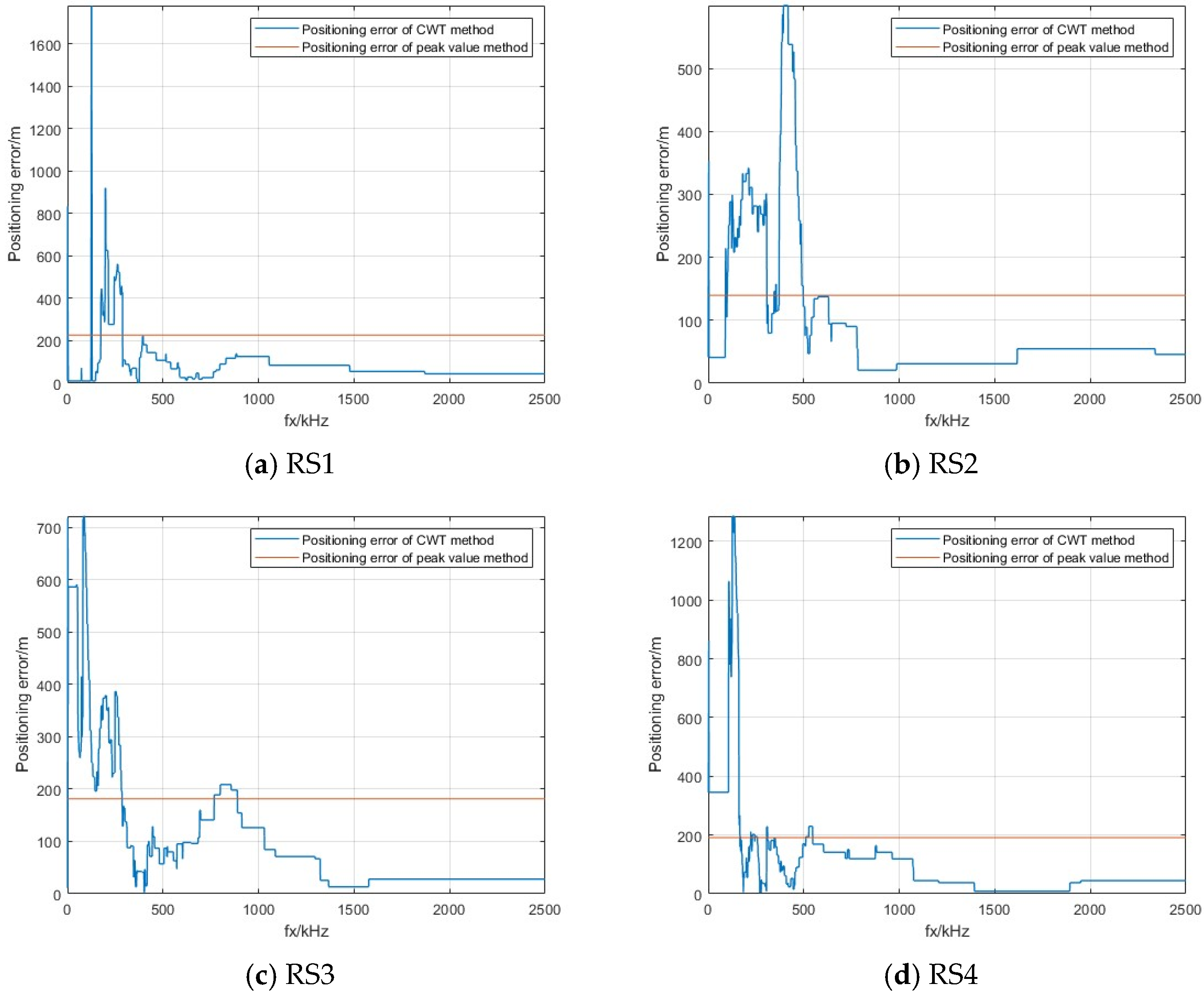
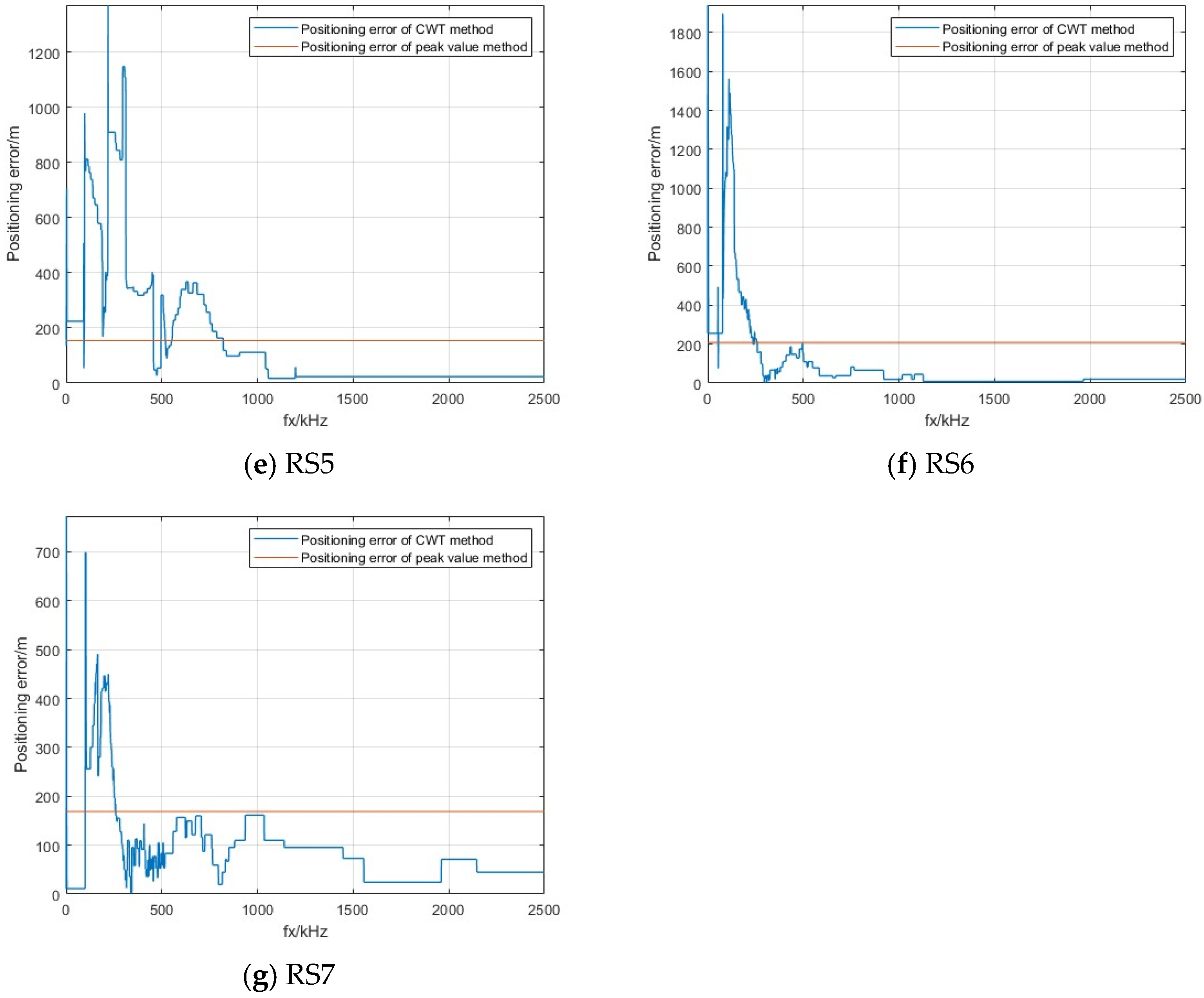
4.3.2. Effects of Current Waveform Profile on Positioning Accuracy of CWT Method
4.4. Wavelet Frequency Selection
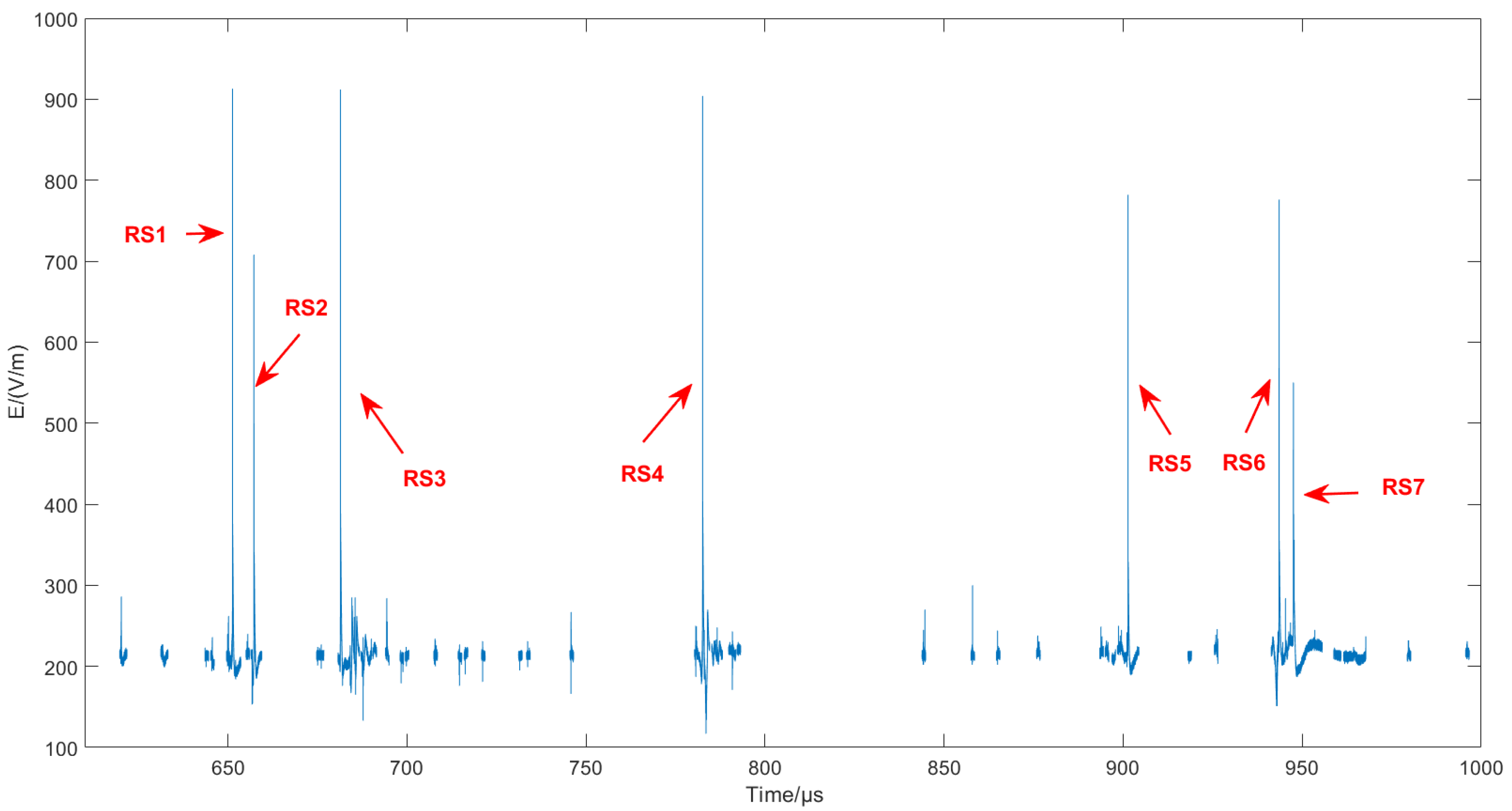
4.5. Comparison of Location Results for Multiple Return Strokes Induced by an Artificial Triggering Lightning
4.6. Comparison of Location Results for Multiple Return Strokes Induced by a Cloud-to-Ground (CG) Lightning Flash
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fan, X.P.; Zhang, Y.J.; Zheng, D.; Zhang, Y.; Lyu, W.T.; Liu, H.Y.; Xu, L.T. A New Method of Three-Dimensional Location for Low-Frequency Electric Field Detection Array. J. Geophys. Res. Atmos. 2018, 123, 8792–8812. [Google Scholar] [CrossRef]
- Liu, B. Positioning Algorithm and Observation Application of Dual Frequency Band Lightning Positioning System. Ph.D. Thesis, Army Engineering University of PLA, Nanjing, China, 2019. [Google Scholar]
- Wang, T. Research on Imaging Method of Broadband Lightning VHF Array. Ph.D. Thesis, Army Engineering University of PLA, Nanjing, China, 2018. [Google Scholar]
- Rison, W.; Thomas, R.J.; Krehbiel, P.R.; Hamlin, T.; Harlin, J. A GPS-based Three-Dimensional Lightning Mapping System Initial Observations in Central New Mexico. Geophys. Res. Lett. 1999, 23, 3573–3576. [Google Scholar] [CrossRef]
- Nucci, C.A.; Diendorfer, G.; Uman, M.A.; Rachidi, F.; Ianoz, M.; Mazzetti, C. Lightning return stroke current models with specified channel-base current: A review and comparison. J. Geophys. Res. Atmos. 1990, 95, 20395–20408. [Google Scholar] [CrossRef]
- Hui, P. Research on texture Feature Extraction based on Wavelet Transform Technology. Master’s Thesis, Shenyang Institute of Aeronautical Engineering, Shenyang, China, 2010. [Google Scholar]
- Nichoga, V.; Pavlysh, V.; Romanyshyn, Y. Features of Use Wavelet Transforms for Processing and Analysis of Rail Fault Detection Signals. In Proceedings of the 2010 International Conference on Modern Problems of Radio Engineering, Telecommunications and Computer Science (TCSET), Lviv, Ukraine, 23–27 February 2010. [Google Scholar]
- Lei, W.T.; Junjie, C. Air coupled Lamb wave imaging detection of thin plate damage based on continuous wavelet transform. Nondestruct. Test. 2019, 41, 43–47. [Google Scholar]
- Liu, Z. Experimental study of circumferential guided wave scanning imaging of back wall pipes based on CWT. J. Mech. Eng. 2013, 49, 14. [Google Scholar] [CrossRef]
- Gong, C.; Shi, L.; Li, G. Improving acoustic emission source location accuracy by narrow-band feature extraction. Piezoelectr. Acousto-Opt. 2009, 31, 292–295. [Google Scholar]
- Yao, Z.; Yang, J.; Zheng, J.; Li, Y.; Xie, D.; Wu, J. Cable Fault Location and Signal Separation Based on Continuous Wavelet Transform. In Proceedings of the 4th International Conference on Electrical Materials and Power Equipment (ICEMPE), Shanghai, China, 7–10 May 2023. [Google Scholar] [CrossRef]
- Li, H. Bearing Fault Diagnosis Based on Time Scale Spectrum of Continuous Wavelet Transform. In Proceedings of the Eighth International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), Bento Gonçalves, Brazil, 26–28 July 2011. [Google Scholar] [CrossRef]
- Priyadarshini, M.S.; Krishna, D.; Reddy, M.B.; Bhatt, A.; Bajaj, M.; Mahmoud, M.M. Continuous Wavelet Transform Based Visualization of Transient and Short Duration Voltage Variations. In Proceedings of the 4th IEEE Global Conference for Advancement in Technology (GCAT), Bangalore, India, 6–8 October 2023. [Google Scholar] [CrossRef]
- Rong, Q.; Zhang, Y. Fault Detection of Marine Propulsion Motor Rotor Broken Bar Based on Continuous Wavelet Transform. In Proceedings of the PELS Students and Young Professionals Symposium (SYPS), Shanghai, China, 27–29 August 2023. [Google Scholar] [CrossRef]
- Tran, T.H. Improvement of Methods for Detection of Characteristic Points of Biomedical Signals Based on Continuous Wavelet Transformation in the Continuous Flow of Data. In Proceedings of the Third International Conference on Human Factors in Complex Technical Systems and Environments (ERGO)s and Environments (ERGO), Saint Petersburg, Russia, 4–7 July 2018. [Google Scholar] [CrossRef]
- Zhang, C.-J.; Duanmu, C.-J.; Chen, H.-Y. Typhoon Image Segmentation by Combining Curvelet Transform with Continuous Wavelet Transform. In Proceedings of the 2007 International Conference on Wavelet Analysis and Pattern Recognition, Beijing, China, 2–4 November 2007. [Google Scholar] [CrossRef]
- Jiang, R.-J.; Dong, W.-S.; Liu, H.-Y.; Lei, Y. Location and radiation intensity of bipolar narrow pulse events in thunderstorms. J. Appl. Meteorol. 2018, 29, 177–187. [Google Scholar]
- Liu, H.-Y.; Dong, W.S.; Li, C.; Li, L.-F.; Qin, B.-Q.; Lei, Y. A dual-band three-dimensional all-lightning positioning system and its preliminary observation results. In Proceedings of the CSEE, Rome, Italy, 7–9 April 2019; Volume 39, pp. 3561–3569. [Google Scholar] [CrossRef]
- Wu, T.; Wang, D.; Takagi, N. Lightning Mapping with an Array of Fast Antennas. Geophys. Res. Lett. 2018, 45, 3698–3705. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance | Unit | Value |
|---|---|---|
| Number of sites | — | 6 |
| Distance between sites | km | 10~30 |
| Time constant | ms | 1 |
| Sampling frequency | MHz | 5 |
| Resolution of data acquisition card | bit | 12 |
| Record length | ms | 1/10 |
| GPS timing accuracy | ns | ≤50 |
| VLF/LF receiver 3 dB bandwidth | kHz | 0.2~800 |
| RS | Positioning Results (Km) | Mean Coordinate (Km) | Mean Error (m) | |||
|---|---|---|---|---|---|---|
| CWT Method | Peak Value Method | CWT Method | Peak Value Method | CWT Method | Peak Value Method | |
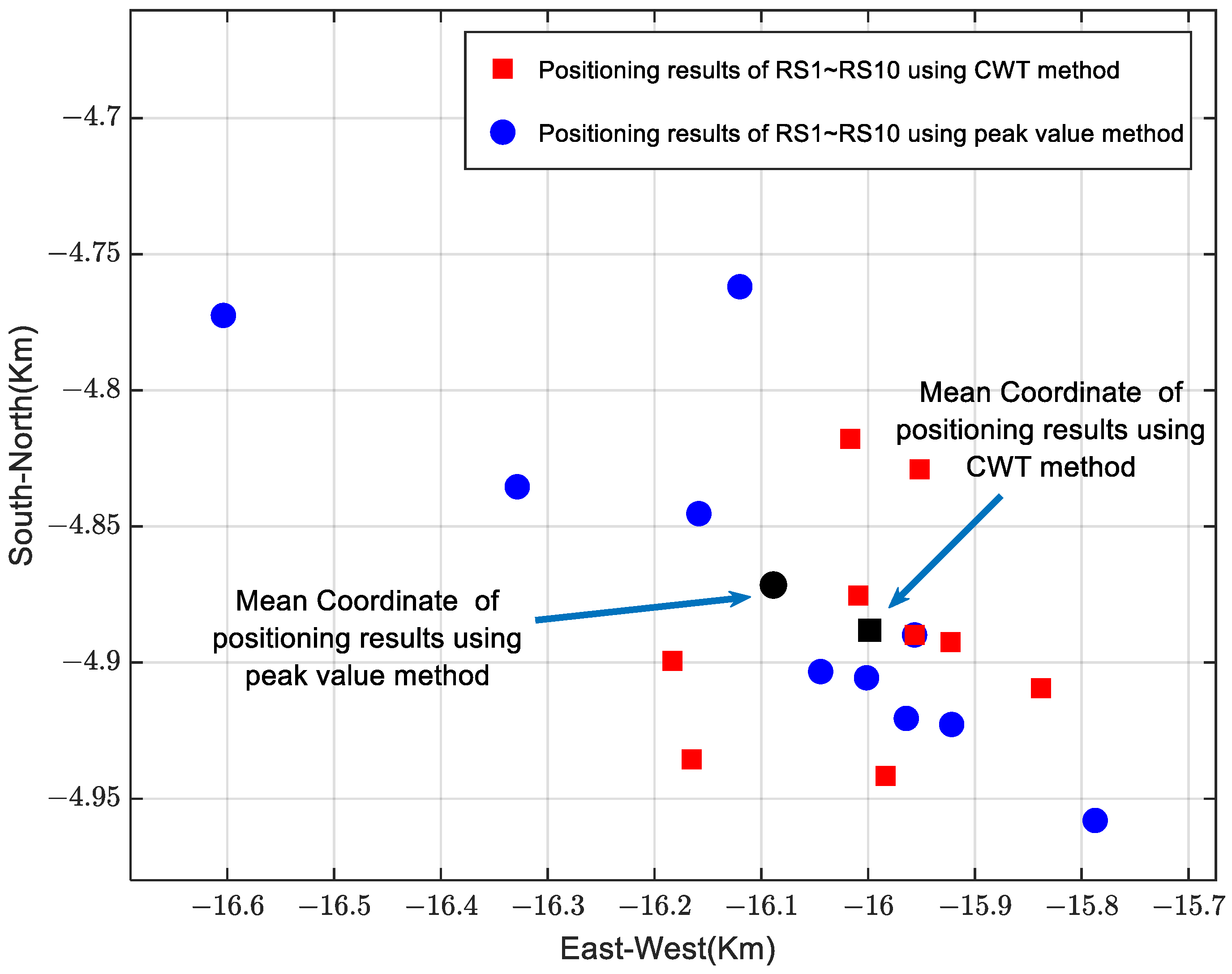
| RS1 | −16.1650, −4.9355 | −16.6037, −4.7725 | −15.9983, −4.8880 | −16.0886, −4.8715 | 90.0 | 185.9 |
| RS2 | 16.0092, −4.8754 | −16.1584, −4.8453 | ||||
| RS3 | 16.0169, −4.8178 | −16.1200, −4.7619 | ||||
| RS4 | 15.9229, −4.8925 | −15.7873, −4.9580 | ||||
| RS5 | 16.1832, −4.8994 | −16.0444, −4.9033 | ||||
| RS6 | 15.9564, −4.8898 | −16.3285, −4.8354 | ||||
| RS7 | 15.8381, −4.9095 | −15.9642, −4.9205 | ||||
| RS8 | 15.9518, −4.8291 | −15.9564, −4.8898 | ||||
| RS9 | 15.9835, −4.9417 | −15.9217, −4.9227 | ||||
| RS10 | 15.9564, −4.8898 | −16.0014, −4.9056 | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, J.; Gong, J.; Zhou, D. Lightning Return Stroke Positioning Method Based on CWT Narrowband Feature Extraction. Atmosphere 2025, 16, 302. https://doi.org/10.3390/atmos16030302
Shen J, Gong J, Zhou D. Lightning Return Stroke Positioning Method Based on CWT Narrowband Feature Extraction. Atmosphere. 2025; 16(3):302. https://doi.org/10.3390/atmos16030302
Chicago/Turabian StyleShen, Jinxing, Jiancheng Gong, and Dong Zhou. 2025. "Lightning Return Stroke Positioning Method Based on CWT Narrowband Feature Extraction" Atmosphere 16, no. 3: 302. https://doi.org/10.3390/atmos16030302
APA StyleShen, J., Gong, J., & Zhou, D. (2025). Lightning Return Stroke Positioning Method Based on CWT Narrowband Feature Extraction. Atmosphere, 16(3), 302. https://doi.org/10.3390/atmos16030302