
Air Quality-Driven Traffic Management Using High-Resolution Urban Climate Modeling Coupled with a Large Traffic Simulation

Abstract
1. Introduction
1.1. Aim of the Study
- We evaluate a traffic management approach based on air pollution concentrations attributed to street segments versus a time-specific approach.
- Since pollution concentrations fluctuate more over the course of the day than they do spatially, we propose a time-specific traffic management policy. This approach mitigates peak pollution periods, particularly during morning hours.
- The effectiveness of this policy is then evaluated through multiple simulation setups, assessing its impact on modal split, traffic volumes, and pollution concentrations.
1.2. Related Work
2. Methodology
2.1. MATSim—Traffic Model
- During the mobility simulation, synthetic persons execute their individual plans and interact with other synthetic persons. In contrast to microscopic traffic simulations, MATSim does not calculate complex vehicle behavior, but uses a simple queue model instead. Due to the low computational demand for simulating traffic flow, it is possible to simulate large traffic scenarios.
- The executed plans of the synthetic persons are scored, with the execution of activities yielding positive utility and time spent in traffic yielding negative utility. Additionally, monetary costs like public transit fares or congestion charges are considered as well.
- A predefined share of synthetic persons adjusts their behavior by creating new plans. This includes alternative routes, switching to another mode, or altering start and end times of activities. The remaining synthetic persons sticks to the currently selected plan and try it again in the next iteration.
2.2. MATSim—Emission Model
2.3. PALM-4U—Dispersion Model
2.4. MATSim–PALM-4U Integration
2.5. Simulation Setup
2.5.1. MATSim Setup
2.5.2. PALM-4U Setup
2.6. Design of Traffic Management Policy
3. Results
3.1. Scenario A—Toll Within the City Center
3.2. Scenario B—Toll in the Berlin City Area
3.3. Scenario B—Spatial Hotspot Mitigation
4. Discussion
4.1. Limitations
4.2. Advantages
4.3. Comparison and Advancements over Existing Work
5. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADMS | Atmospheric Dispersion Modelling System |
| BEV | Battery electric vehicle |
| CALINE | A line source air quality dispersion model |
| CFD | Computational fluid dynamics |
| CMEM | Comprehensive Modal Emission Model |
| COPERT | Computer Programme to Calculate Emissions from Road Transport |
| EMIT | Environmental Model of Individual Traffic |
| EU | European Union |
| GTFS | General Transit Feed Specification |
| HBEFA | Handbook Emission Factors for Road Transport |
| HECT | Handbook on the External Costs of Transport |
| HPC | High-performance computing |
| IMMIS | Integrated Model for the Management of Traffic-related Emissions |
| LES | Large-eddy simulation |
| LOD | Level of detail |
| MATSim | Multi-Agent Transport Simulation |
| MOVES | Motor Vehicle Emission Simulator |
| NO | Nitrogen monoxide |
| NO2 | Nitrogen dioxide |
| NOx | Nitrogen oxides |
| O3 | Ozone |
| OSM | OpenStreetMap |
| OSPM | Operational Street Pollution Model |
| PT | Public transit |
| RANS | Reynolds-averaged Navier–Stokes |
| RLINE | A dispersion model for near-road applications |
Appendix A

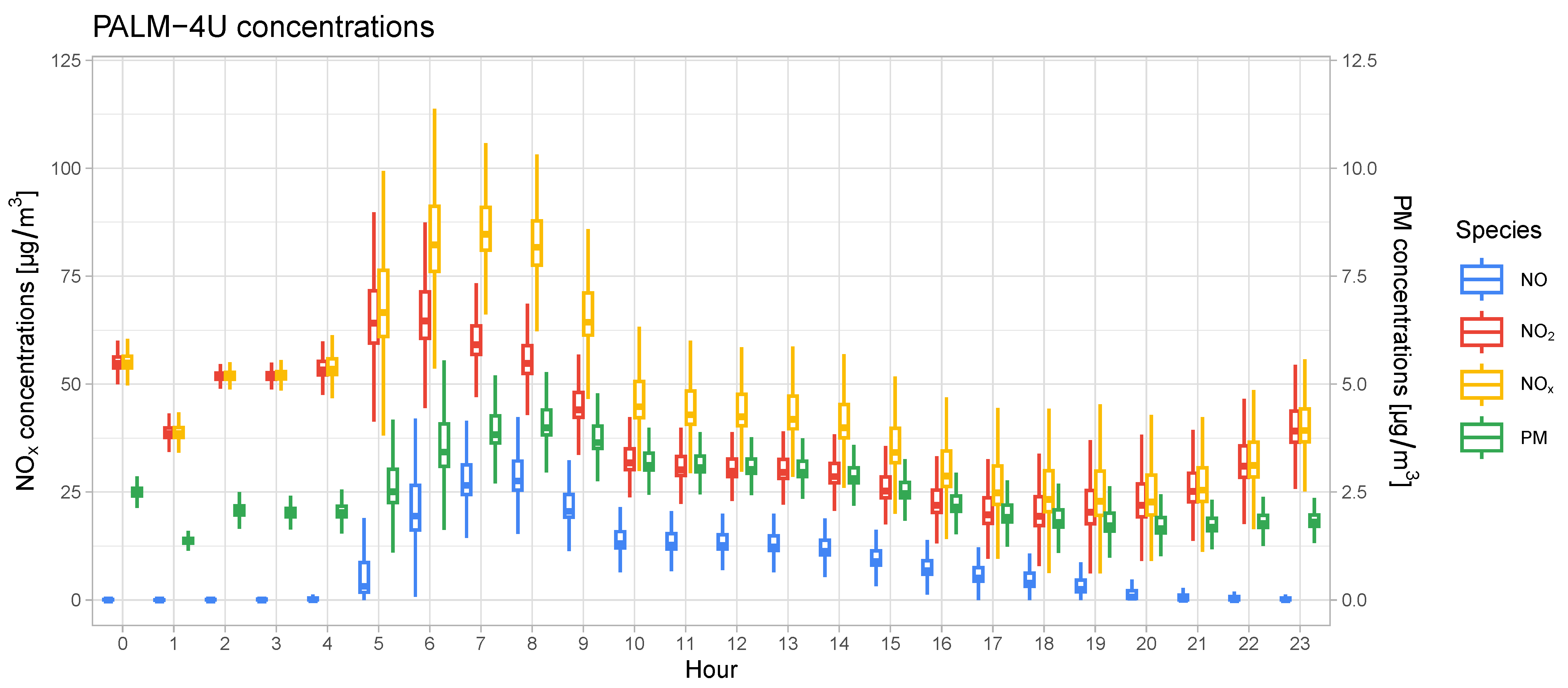
- A minimum threshold for NOx concentrations from the PALM-4U simulation is visible. This threshold changes throughout the day, being higher in the morning and lower in the afternoon.
- The upper boundary of the point cloud for NOx values from PALM-4U also changes over time. In the morning, NOx values are more spread out and reach higher levels. In the afternoon, the spread is smaller, and the upper boundary is lower.
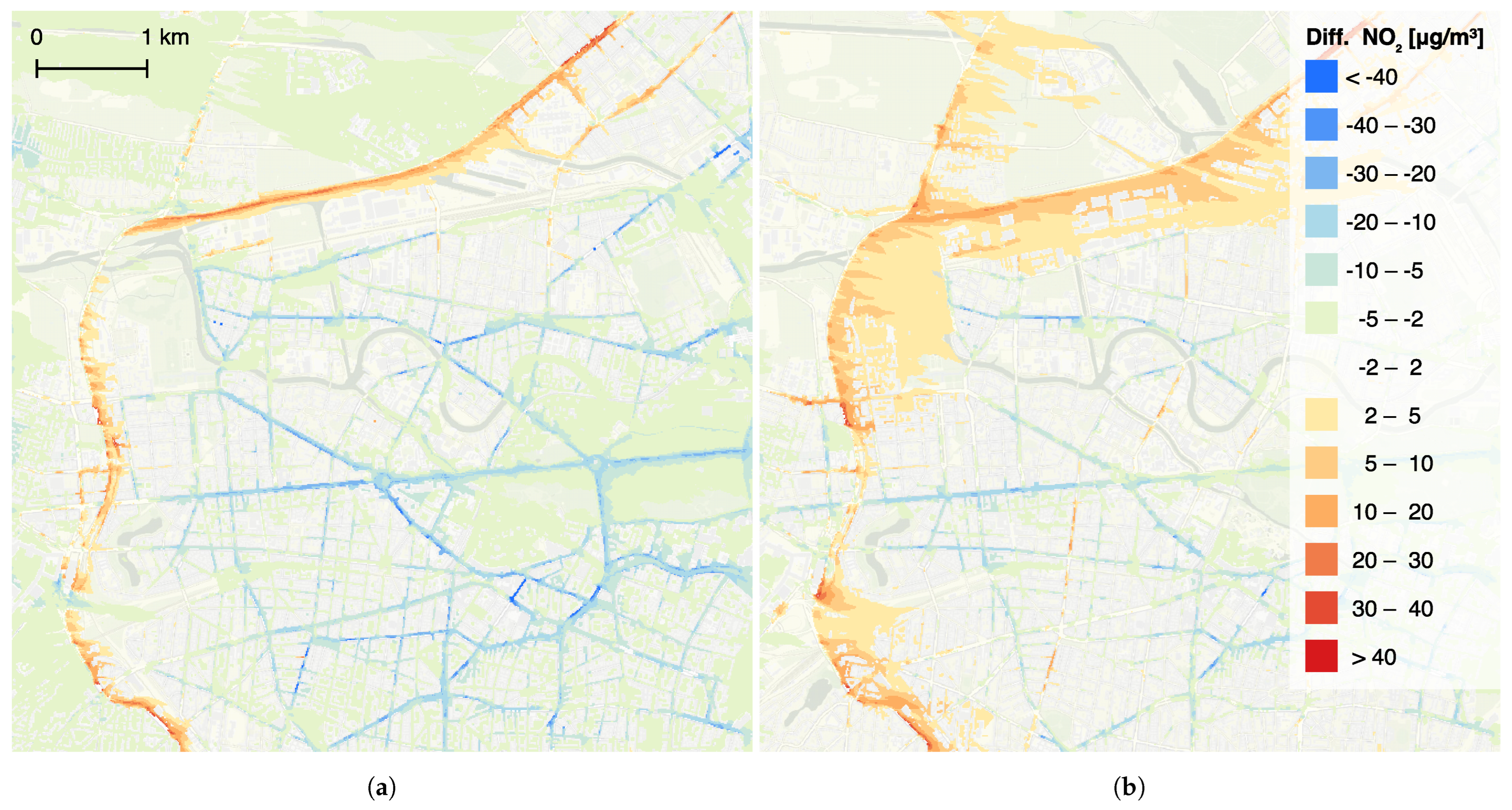
- Street layout and dispersion—Street alignment relative to the wind direction strongly influences pollutant dispersion. On streets parallel to wind flow, pollutants tend to disperse in the downwind direction, resulting in lower concentrations. In contrast, perpendicular streets within densely developed areas show elevated concentrations on the upwind side. On streets surrounded by minimal development, pollution is dispersed in the downwind direction, leading to lower concentrations as well.
- Boundary layer—The boundary layer expands after sunrise and shrinks again after sunset. This means that pollutants are diluted in a much smaller air volume at the beginning and end of the day compared to midday, leading to much higher concentrations for the same traffic volume at the start of the day.
- Air chemistry—Chemical transformations, such as the photolysis of NO2 under sunlight, impact pollutant concentration levels. These reactions are sensitive to sunlight, which varies throughout the day.
- Geometric artifacts—Converting street canyons to a grid-based format introduces stepped surfaces that do not accurately reflect smooth canyon walls, causing fluctuations in canyon width. This artifact results in small-scale concentration anomalies within the grid cells, leading to outliers in pollutant concentrations.
References
- Ciarelli, G.; Colette, A.; Schucht, S.; Beekmann, M.; Andersson, C.; Manders-Groot, A.; Mircea, M.; Tsyro, S.; Fagerli, H.; Ortiz, A.G.; et al. Long-term health impact assessment of total PM2.5 in Europe during the 1990–2015 period. Atmos. Environ. X 2019, 3, 100032. [Google Scholar] [CrossRef]
- European Environment Agency. Air Quality in Europe: 2020 Report; Publications Office of the European Union: Luxembourg, 2020. [Google Scholar]
- Schulz, H.; Karrasch, S.; Bölke, G.; Cyrys, J.; Hornberg, C.; Pickford, R.; Schneider, A.; Witt, C.; Hoffmann, B. Atmen. DGfPuB eV Deutsche Gesellschaft für Pneumologie und Beatmungsmedizine. V., Berlin. 2018. Available online: https://www.pneumologeninsachsen.de/fileadmin/template/downloads/Oeffentlicher_Bereich/Pressemitteilungen/DGP_Luftschadstoffe_Positionspapier_20190129.pdf (accessed on 24 January 2024).
- Desa, U.N. World Urbanization Prospects 2018: Highlights; Technical report; United Nations: New York, NY, USA, 2018. [Google Scholar]
- Dons, E.; Int Panis, L.; Van Poppel, M.; Theunis, J.; Willems, H.; Torfs, R.; Wets, G. Impact of time–activity patterns on personal exposure to black carbon. Atmos. Environ. 2011, 45, 3594–3602. [Google Scholar] [CrossRef]
- Ma, X.; Zou, B.; Deng, J.; Gao, J.; Longley, I.; Xiao, S.; Guo, B.; Wu, Y.; Xu, T.; Xu, X.; et al. A comprehensive review of the development of land use regression approaches for modeling spatiotemporal variations of ambient air pollution: A perspective from 2011 to 2023. Environ. Int. 2024, 183, 108430. [Google Scholar] [CrossRef] [PubMed]
- McConnell, R.; Islam, T.; Shankardass, K.; Jerrett, M.; Lurmann, F.; Gilliland, F.; Gauderman, J.; Avol, E.; Künzli, N.; Yao, L.; et al. Childhood incident asthma and traffic-related air pollution at home and school. Environ. Health Perspect. 2010, 118, 1021–1026. [Google Scholar] [CrossRef] [PubMed]
- Hoek, G.; Beelen, R.; de Hoogh, K.; Vienneau, D.; Gulliver, J.; Fischer, P.; Briggs, D. A review of land-use regression models to assess spatial variation of outdoor air pollution. Atmos. Environ. (1994) 2008, 42, 7561–7578. [Google Scholar] [CrossRef]
- Gürbüz, H.; Şöhret, Y.; Ekici, S. Evaluating effects of the COVID-19 pandemic period on energy consumption and enviro-economic indicators of Turkish road transportation. Energy Sources Part Recover. Util. Environ. Eff. 2021, 1–13. [Google Scholar] [CrossRef]
- von Schneidemesser, E.; Sibiya, B.; Caseiro, A.; Butler, T.; Lawrence, M.G.; Leitao, J.; Lupascu, A.; Salvador, P. Learning from the COVID-19 lockdown in berlin: Observations and modelling to support understanding policies to reduce NO2. Atmos. Environ. X 2021, 12, 100122. [Google Scholar] [CrossRef] [PubMed]
- Horni, A.; Nagel, K.; Axhausen, K.W. The Multi-Agent Transport Simulation Matsim; Ubiquity Press: London, UK, 2016. [Google Scholar] [CrossRef]
- Maronga, B.; Banzhaf, S.; Burmeister, C.; Esch, T.; Forkel, R.; Fröhlich, D.; Fuka, V.; Gehrke, K.F.; Geletič, J.; Giersch, S.; et al. Overview of the PALM model system 6.0. Geosci. Model Dev. 2020, 13, 1335–1372. [Google Scholar] [CrossRef]
- Laudan, J.; Banzhaf, S.; Khan, B.; Nagel, K. Coupling MATSim and the PALM model system—Large scale traffic and emission modeling with high-resolution computational fluid dynamics dispersion modeling. Atmosphere 2024, 15, 1183. [Google Scholar] [CrossRef]
- Mądziel, M. Vehicle Emission Models and Traffic Simulators: A Review. Energies 2023, 16, 3941. [Google Scholar] [CrossRef]
- Forehead, H.; Huynh, N. Review of modelling air pollution from traffic at street-level—The state of the science. Environ. Pollut. 2018, 241, 775–786. [Google Scholar] [CrossRef] [PubMed]
- Ma, X.; Lei, W.; Andréasson, I.; Chen, H. An Evaluation of Microscopic Emission Models for Traffic Pollution Simulation Using On-board Measurement. Environ. Model. Assess. 2012, 17, 375–387. [Google Scholar] [CrossRef]
- Ntziachristos, L. COPERT III Computer Programme to Calculate Emissions from Road Transport: Methodology and Emission Factors (Version 2.1); European Environment Agency: Copenhagen, Denmark, 2000. [Google Scholar]
- Epa, U.S. Overview of EPA’s MOtor Vehicle Emission Simulator (MOVES3); U.S. Environmental Protection Agency: Washington, DC, USA, 2021.
- Scora, G.; Barth, M. Comprehensive modal emissions model (cmem), version 3.01. In User Guide; Centre for Environmental Research and Technology, University of California: Riverside, CA, USA, 2006; Volume 1070, p. 1580. [Google Scholar]
- Cappiello, A.; Chabini, I.; Nam, E.K.; Lue, A.; Abou Zeid, M. A statistical model of vehicle emissions and fuel consumption. In Proceedings of the IEEE 5th International Conference on Intelligent Transportation Systems, Singapore, 6 September 2002; pp. 801–809. [Google Scholar] [CrossRef]
- Johnson, J.B. An Introduction to Atmospheric Pollutant Dispersion Modelling. Environ. Sci. Proc. 2022, 19, 18. [Google Scholar] [CrossRef]
- Liang, M.; Chao, Y.; Tu, Y.; Xu, T. Vehicle Pollutant Dispersion in the Urban Atmospheric Environment: A Review of Mechanism, Modeling, and Application. Atmosphere 2023, 14, 279. [Google Scholar] [CrossRef]
- Vardoulakis, S.; Fisher, B.E.A.; Pericleous, K.; Gonzalez-Flesca, N. Modelling air quality in street canyons: A review. Atmos. Environ. 2003, 37, 155–182. [Google Scholar] [CrossRef]
- Benson, P.E. A review of the development and application of the CALINE3 and 4 models. Atmos. Environ. Part Urban Atmos. 1992, 26, 379–390. [Google Scholar] [CrossRef]
- Snyder, M.G.; Venkatram, A.; Heist, D.K.; Perry, S.G.; Petersen, W.B.; Isakov, V. RLINE: A line source dispersion model for near-surface releases. Atmos. Environ. 2013, 77, 748–756. [Google Scholar] [CrossRef]
- Berkowicz, R.; Hertel, O.; Larsen, S.E.; Soerensen, N.N.; Nielsen, M. Modelling Traffic Pollution in Streets; Technical Report; National Environmental Research Institute: Copenhagen, Denmark, 1997.
- Carruthers, D.J.; Holroyd, R.J.; Hunt, J.C.R.; Weng, W.S.; Robins, A.G.; Apsley, D.D.; Thompson, D.J.; Smith, F.B. UK-ADMS: A new approach to modelling dispersion in the earth’s atmospheric boundary layer. J. Wind Eng. Ind. Aerodyn. 1994, 52, 139–153. [Google Scholar] [CrossRef]
- Diegmann, V. Handbuch_Immisluft_5_2.pdf; IVU Umwelt GmbH: Breisgau, Germany, 2011. [Google Scholar]
- Wendt, J. Computational Fluid Dynamics: An Introduction; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Tominaga, Y.; Stathopoulos, T. Ten questions concerning modeling of near-field pollutant dispersion in the built environment. Build. Environ. 2016, 105, 390–402. [Google Scholar] [CrossRef]
- Khan, B.; Banzhaf, S.; Chan, E.C.; Forkel, R.; Kanani-Sühring, F.; Ketelsen, K.; Kurppa, M.; Maronga, B.; Mauder, M.; Raasch, S.; et al. Development of an atmospheric chemistry model coupled to the PALM model system 6.0: Implementation and first applications. Geosci. Model Dev. 2021, 14, 1171–1193. [Google Scholar] [CrossRef]
- Ioannidis, G.; Li, C.; Tremper, P.; Riedel, T.; Ntziachristos, L. Application of CFD Modelling for Pollutant Dispersion at an Urban Traffic Hotspot. Atmosphere 2024, 15, 113. [Google Scholar] [CrossRef]
- Zhang, Y.; Ye, X.; Wang, S.; He, X.; Dong, L.; Zhang, N.; Wang, H.; Wang, Z.; Ma, Y.; Wang, L.; et al. Large-eddy simulation of traffic-related air pollution at a very high resolution in a mega-city: Evaluation against mobile sensors and insights for influencing factors. Atmos. Chem. Phys. 2021, 21, 2917–2929. [Google Scholar] [CrossRef]
- Zheng, X.; Yang, J. Impact of moving traffic on pollutant transport in street canyons under perpendicular winds: A CFD analysis using large-eddy simulations. Sustain. Cities Soc. 2022, 82, 103911. [Google Scholar] [CrossRef]
- Woodward, H.; Stettler, M.; Pavlidis, D.; Aristodemou, E.; ApSimon, H.; Pain, C. A large eddy simulation of the dispersion of traffic emissions by moving vehicles at an intersection. Atmos. Environ. 2019, 215, 116891. [Google Scholar] [CrossRef]
- San José, R.; Pérez, J.L.; Gonzalez-Barras, R.M. Assessment of mesoscale and microscale simulations of a NO2 episode supported by traffic modelling at microscopic level. Sci. Total Environ. 2021, 752, 141992. [Google Scholar] [CrossRef] [PubMed]
- Sanchez, B.; Santiago, J.L.; Martilli, A.; Martin, F.; Borge, R.; Quaassdorff, C.; de la Paz, D. Modelling NOX concentrations through CFD-RANS in an urban hot-spot using high resolution traffic emissions and meteorology from a mesoscale model. Atmos. Environ. 2017, 163, 155–165. [Google Scholar] [CrossRef]
- Samad, A.; Caballero Arciénega, N.A.; Alabdallah, T.; Vogt, U. Application of the Urban Climate Model PALM-4U to Investigate the Effects of the Diesel Traffic Ban on Air Quality in Stuttgart. Atmosphere 2024, 15, 111. [Google Scholar] [CrossRef]
- Kaddoura, I. Simulated Dynamic Pricing for Transport System Optimization. Ph.D. Thesis, Technische Universitaet Berlin, Berlin, Germany, 2019. [Google Scholar] [CrossRef]
- Xiong, C.; Zhu, Z.; He, X.; Chen, X.; Zhu, S.; Mahapatra, S.; Chang, G.L.; Zhang, L. Developing a 24-h large-scale microscopic traffic simulation model for the before-and-after study of a new tolled freeway in the Washington, DC–Baltimore region. J. Transp. Eng. 2015, 141, 05015001. [Google Scholar] [CrossRef]
- Sánchez, J.M.; Ortega, E.; López-Lambas, M.E.; Martín, B. Evaluation of emissions in traffic reduction and pedestrianization scenarios in Madrid. Transp. Res. Part D Trans. Environ. 2021, 100, 103064. [Google Scholar] [CrossRef]
- Bin Thaneya, A.; S Apte, J.; Horvath, A. A human exposure-based traffic assignment model for minimizing fine particulate matter (PM2.5) intake from on-road vehicle emissions. Environ. Res. Lett. 2022, 17, 074034. [Google Scholar] [CrossRef]
- Notter, B.; Keller, M.; Althaus, H.J.; Cox, B.; Knörr, W.; Heidt, C.; Biemann, K.; Räder, D.; Jamet, M. Handbuch Emissionsfaktoren des Strassenverkehrs; Technical Report 4.1; INFRAS: Bern, Switzerland, 2019. [Google Scholar]
- Agarwal, A. Mitigating Negative Transport Externalities in Industrialized and Industrializing Countries. Ph.D. Thesis, Technische Universitaet Berlin, Berlin, Germany, 2017. [Google Scholar] [CrossRef]
- Kickhöfer, B. Economic Policy Appraisal and Heterogeneous Users. Ph.D. Thesis, Technische Universität Berlin, Berlin, Germany, 2014. [Google Scholar]
- Maronga, B.; Gross, G.; Raasch, S.; Banzhaf, S.; Forkel, R.; Heldens, W.; Kanani-Sühring, F.; Matzarakis, A.; Mauder, M.; Pavlik, D.; et al. Development of a new urban climate model based on the model PALM—Project overview, planned work, and first achievements. Meteorol. Z. 2019, 28, 105–119. [Google Scholar] [CrossRef]
- Laudan, J. MATSim Traffic Emission Module for PALM. 2023. Available online: https://zenodo.org/records/8319088 (accessed on 24 January 2024).
- Leich, G.; Rehmann, J.; Schlenther, T.; Martins-Turner, K.; Ziemke, D.; Hugo-CM; Marc.; Maciejewski, M.; Zilske, M.; Rakow, C.; et al. Matsim-Scenarios/Matsim-Berlin: Mosaik-2-01. 2023. Available online: https://zenodo.org/records/8319022 (accessed on 24 January 2024).
- Ziemke, D.; Kaddoura, I.; Nagel, K. The MATSim Open Berlin Scenario: A multimodal agent-based transport simulation scenario based on synthetic demand modeling and open data. Procedia Comput. Sci. 2019, 151, 870–877. [Google Scholar] [CrossRef]
- van Essen, H.; van Wijngaarden, L.; Schroten, A.; Sutter, D.; Bieler, C.; Maffii, S.; Brambilla, M.; Fiorello, D.; Fermi, F.; Parolin, R.; et al. Handbook on the External Costs of Transport, Version 2019; Technical Report 18.4K83.131; European Commission: Luxembourg, 2019. [Google Scholar]
- Gerike, R.; Hubrich, S.; Ließke, F.; Wittig, S.; Wittwer, R. Tabellenbericht zum Forschungsprojekt „Mobilität in Städten—SrV 2018“ in Berlin; Technical report; Senatsverwaltung für Umwelt, Verkehr und Klimaschutz: Berlin, Germany, 2020. [Google Scholar]
- Swedish Transport Agency. Congestion Charge in Stockholm. Available online: https://www.transportstyrelsen.se/en/road/vehicles/taxes-and-fees/road-tolls/congestion-taxes-in-stockholm-and-gothenburg/congestion-tax-in-stockholm/hours-and-amounts-in-stockholm/ (accessed on 16 January 2025).
- Rieser, M.; Beuck, U.; Balmer, M.; Nagel, K. Modelling and simulation of a morning reaction to an evening toll. In Proceedings of the Innovations in Travel Modeling; 2008. Available online: https://svn.vsp.tu-berlin.de/repos/public-svn/publications/vspwp/2008/08-01/20080109_submitted.pdf (accessed on 24 January 2024).
- Agarwal, A.; Kickhöfer, B. The correlation of externalities in marginal cost pricing: Lessons learned from a real-world case study. Transportation 2018, 45, 849–873. [Google Scholar] [CrossRef]
- Borghi, F.; Fanti, G.; Cattaneo, A.; Campagnolo, D.; Rovelli, S.; Keller, M.; Spinazzè, A.; Cavallo, D.M. Estimation of the Inhaled Dose of Airborne Pollutants during Commuting: Case Study and Application for the General Population. Int. J. Environ. Res. Public Health 2020, 17, 6066. [Google Scholar] [CrossRef]
- Lim, S.; Holliday, L.; Barratt, B.; Griffiths, C.J.; Mudway, I.S. Assessing the exposure and hazard of diesel exhaust in professional drivers: A review of the current state of knowledge. Air Qual. Atmos. Health 2021, 14, 1681–1695. [Google Scholar] [CrossRef]
- Naghan, D.J.; Neisi, A.; Goudarzi, G.; Dastoorpoor, M.; Fadaei, A.; Angali, K.A. Estimation of the effects PM2.5, NO2, O3 pollutants on the health of Shahrekord residents based on AirQ+ software during (2012–2018). Toxicol. Rep. 2022, 9, 842–847. [Google Scholar] [CrossRef] [PubMed]
- Arregocés, H.A.; Rojano, R.; Restrepo, G. Health risk assessment for particulate matter: Application of AirQ+ model in the northern Caribbean region of Colombia. Air Qual. Atmos. Health 2023, 16, 897–912. [Google Scholar] [CrossRef] [PubMed]
- Khan, B. Input Data for Performing Chemistry Coupled PALM Model System 6.0 Simulations with Different Chemical Mechanisms. 2020. Available online: https://publikationen.bibliothek.kit.edu/1000159940 (accessed on 24 January 2024).
- Laudan, J. Mosaik-2 Simulation Experiment. 2023. Available online: https://depositonce.tu-berlin.de/items/bd40f70b-d194-49a2-a70c-8ec6db364c24 (accessed on 24 January 2024).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Species | Damage per Mass [EUR/kg] | Avg. Emission [g/veh. km] | Damage per Dist. [EUR/km] |
|---|---|---|---|
| PM | 39.6 | 0.002 | 0.000079 |
| NOx | 36.8 | 0.338 | 0.01244 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Laudan, J.; Banzhaf, S.; Khan, B.; Nagel, K. Air Quality-Driven Traffic Management Using High-Resolution Urban Climate Modeling Coupled with a Large Traffic Simulation. Atmosphere 2025, 16, 128. https://doi.org/10.3390/atmos16020128
Laudan J, Banzhaf S, Khan B, Nagel K. Air Quality-Driven Traffic Management Using High-Resolution Urban Climate Modeling Coupled with a Large Traffic Simulation. Atmosphere. 2025; 16(2):128. https://doi.org/10.3390/atmos16020128
Chicago/Turabian StyleLaudan, Janek, Sabine Banzhaf, Basit Khan, and Kai Nagel. 2025. "Air Quality-Driven Traffic Management Using High-Resolution Urban Climate Modeling Coupled with a Large Traffic Simulation" Atmosphere 16, no. 2: 128. https://doi.org/10.3390/atmos16020128
APA StyleLaudan, J., Banzhaf, S., Khan, B., & Nagel, K. (2025). Air Quality-Driven Traffic Management Using High-Resolution Urban Climate Modeling Coupled with a Large Traffic Simulation. Atmosphere, 16(2), 128. https://doi.org/10.3390/atmos16020128