
Sea Fog Recognition near Coastline Using Millimeter-Wave Radar Based on Machine Learning


Abstract
1. Introduction
2. Materials and Methods
2.1. Data
2.2. Methods
2.2.1. Data Partition
| Algorithm 1: Data partition |
| Input: reflectivity factor of the data points (DZ), ϵ, MinPts, angular range of the sea surface data (AR) Output: data after partition |
| 1: add the angle (DA) and distance (R) of data points 2: keep the data within the AR range; this experiment’s AR is between 10 degrees and 190 degrees 3: select DA and R as partition attributes 4: normalize the partitioned attributes 5: delete data points for which no DZ exists, and the remaining points are considered as DP 6: DBSCAN uses ϵ and MinPts as model parameters to cluster DP and complete data partitioning 7: add partition labels |
2.2.2. Construction of Recognition Units
| Algorithm 2: Construction of recognition units |
| Input: the set of partitions after data partition (P), reflectivity factor of data points (DZ) Output: data after constructing the recognition unit |
| 1: for P { 2: use Equations (1) and (2) to calculate the partition area SA 3: if SA < 500,000 4: construct partition as single recognition unit, add recognition unit label 5: else 6: add the Cartesian coordinates (DC) of the data point 7: select DZ and DC as constructed attributes 8: normalize the constructed attribute, 9: calculate K using Equation (3); the data point set within the partition is counted as PDP 10: KMEANS uses K as a model parameter to cluster PDP and build recognition units 11: add recognition unit labels 12: } |
2.2.3. Recognition Unit Classification
| Algorithm 3: Recognition unit classification. |
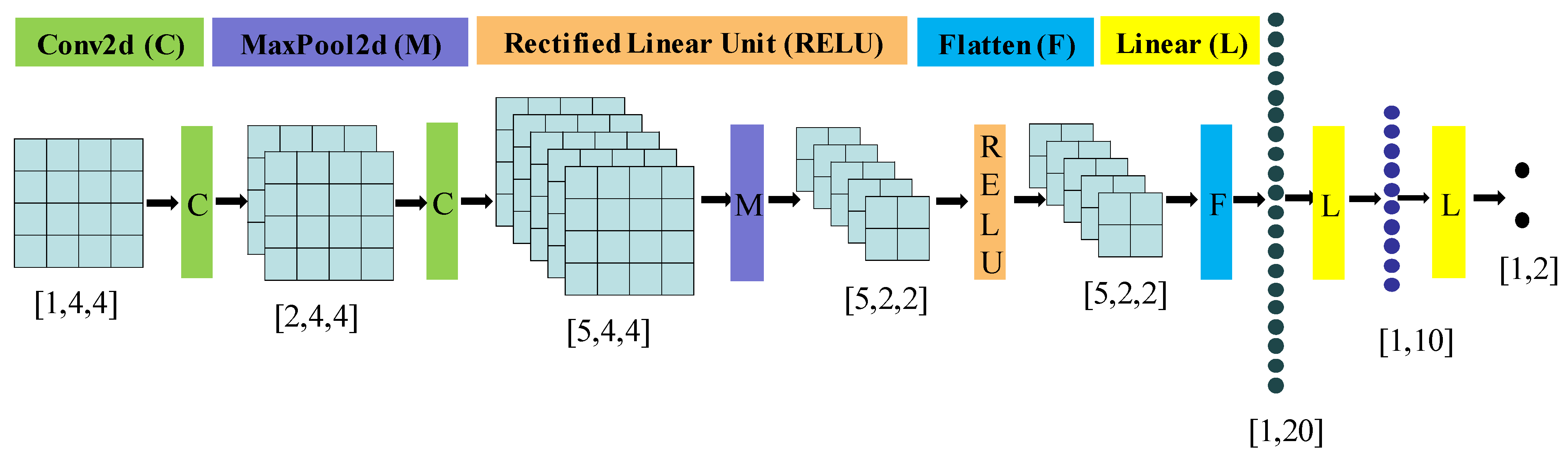
| Input: set of partitions after data partition (P), reflectivity factor of the data points (DZ), Velocity spectrum width of data points (DW), SFRCNN Output: data after classification of recognition units |
| 1: for P { 2: count the set PK of identified units in the partition 3: for PK { 4: select the classification attributes DZ and DW 5: calculate the mean, standard deviation, minimum, 1/4 quantile, 2/4 quantile, 3/4 quantile, and maximum values of the categorical attributes in the recognition unit, remove the maximum value and standard deviation of DW, and record as DD_12 6: after every 3 elements in DD_12, insert a data point with value 0 and reorganize it into 3-dimensional data of 1 × 4 × 4, denoted as DD_16 7: DD_16 is input to SFRCNN to obtain the classification result 8: classification result of marker recognition unit 9: } 10: } |
2.2.4. Partition Coverage
| Algorithm 4: Partition coverage |
| Input: the set of partitions after data partition (P) Output: data after partition coverage |
| 1: for P { 2: if the classification results of all recognition units in the partition are uniform 3: no partition coverage required 4: else 5: calculate the areas of the sea fog region (A) and the non-fog region (B) within the partition 6: if ((A/(A + B) > 0.35) and (B/(A + B) > 0.35) and (A > 6 × 106) and (B > 6 × 106)) or ((A > 2 × 107) and (B > 2 × 107)) 7: no partition coverage required; 8: else 9: achieve partition coverage, where large areas cover small areas; 10: } |
2.2.5. Evaluation Metrics
3. Results and Analysis
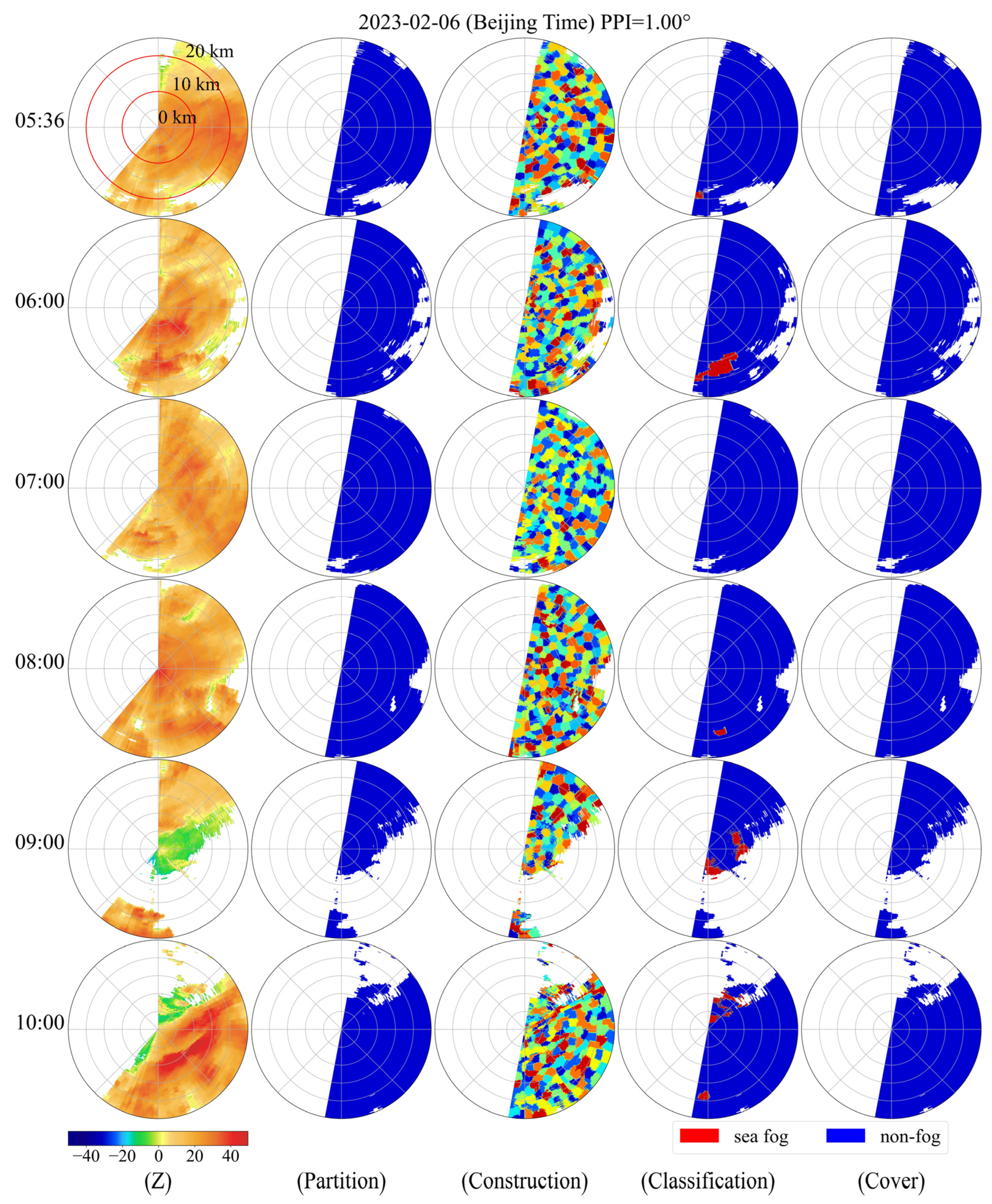
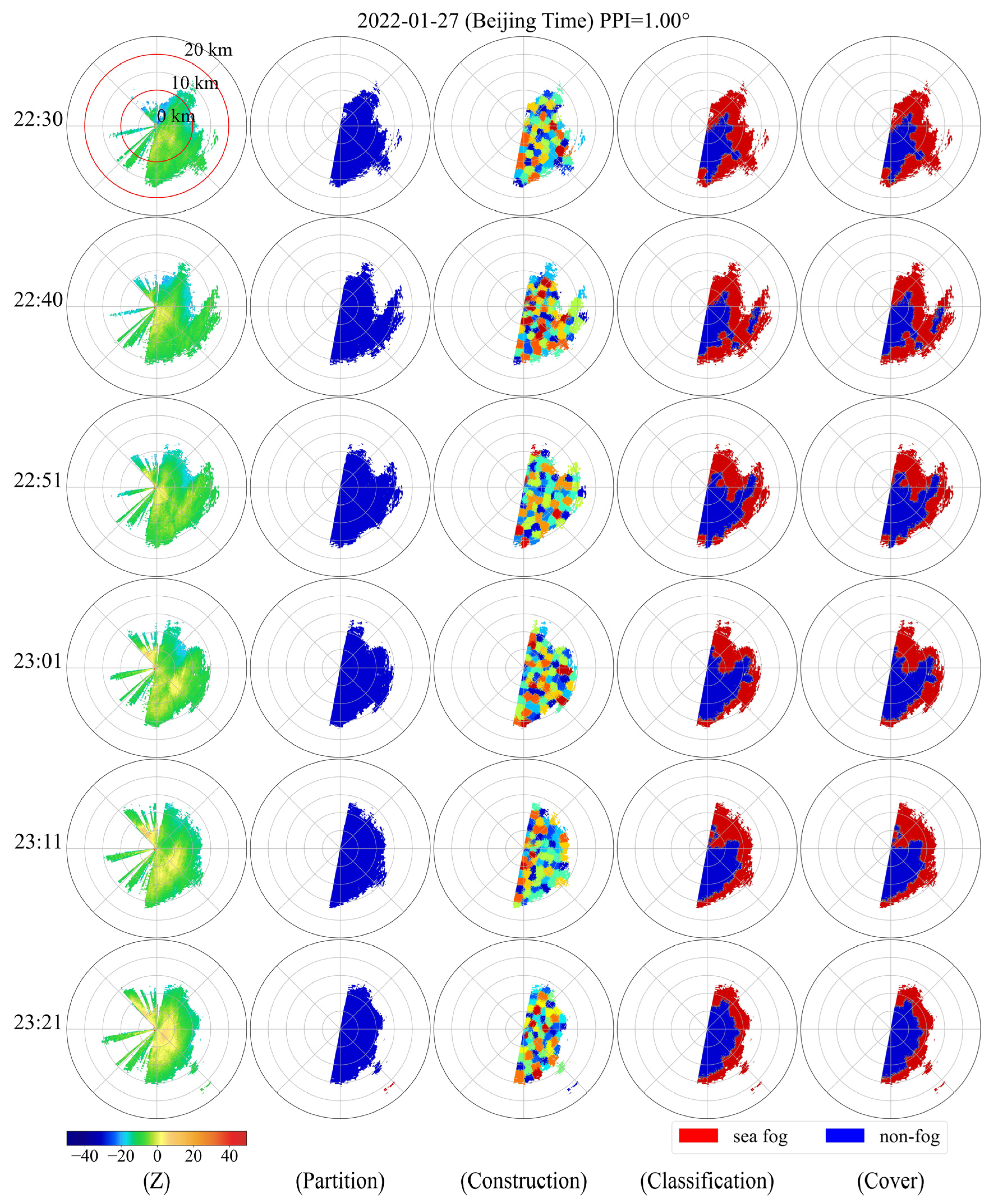
3.1. Sea Fog Recognition Experiment
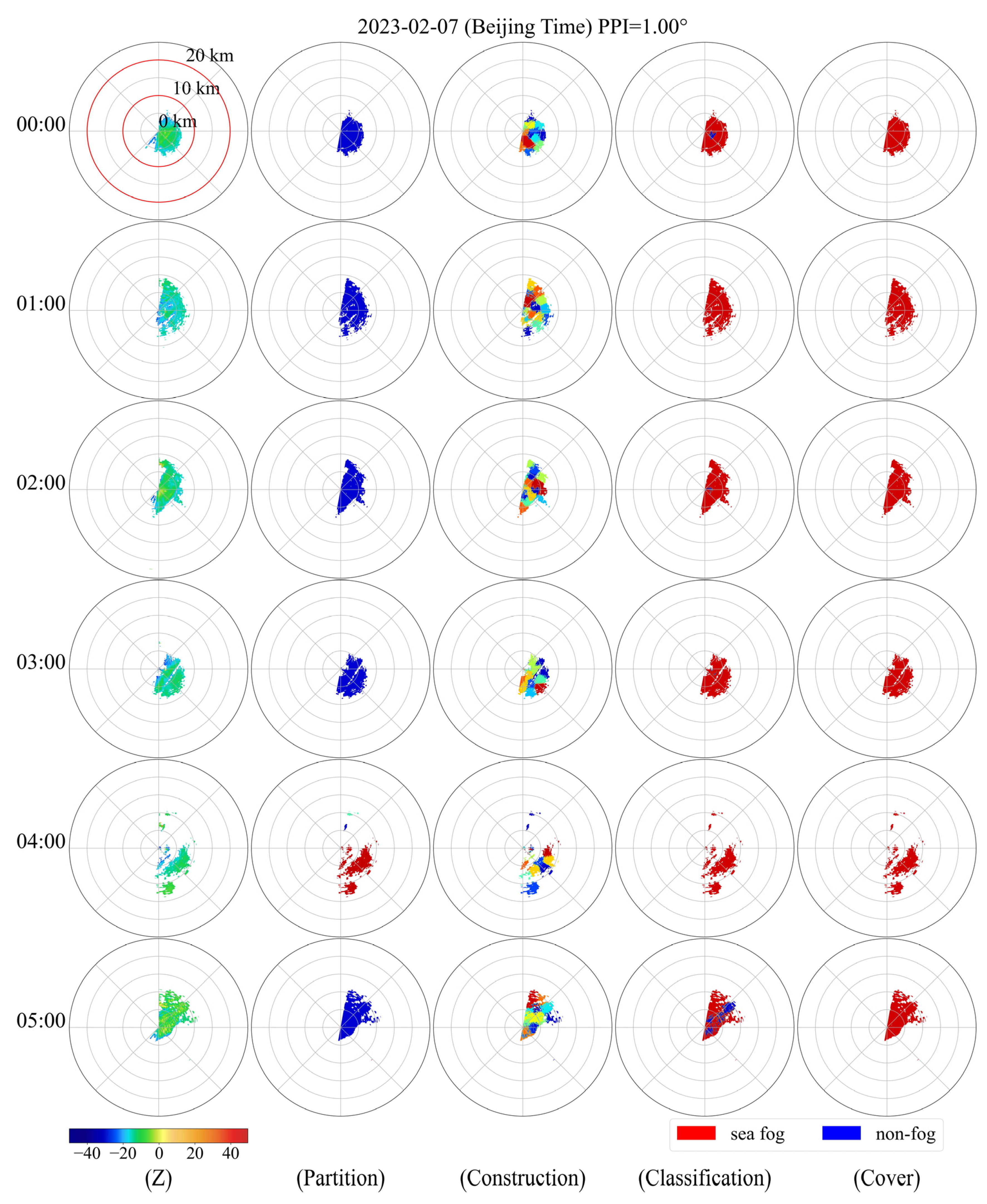
3.2. Independent Test
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bendix, J. A satellite-based climatology of fog and low-level stratus in Germany and adjacent areas. Atmos. Res. 2002, 64, 3–18. [Google Scholar] [CrossRef]
- Gultepe, I.; Tardif, R.; Michaelides, S.C.; Cermak, J.; Bott, A.; Bendix, J.; Müller, M.D.; Pagowski, M.; Hansen, B.; Ellrod, G. Fog research: A review of past achievements and future perspectives. Pure Appl. Geophys. 2007, 164, 1121–1159. [Google Scholar] [CrossRef]
- Akimoto, Y.; Kusaka, H. A climatological study of fog in Japan based on event data. Atmos. Res. 2015, 151, 200–211. [Google Scholar] [CrossRef]
- Guo, J.; Li, P.; Fu, G.; Zhang, W.; Gao, S.; Zhang, S. The structure and formation mechanism of a sea fog event over the Yellow Sea. J. Ocean Univ. 2015, 14, 27–37. [Google Scholar] [CrossRef]
- Yi, L.; Thies, B.; Zhang, S.; Shi, X.; Bendix, J. Optical thickness and effective radius retrievals of low stratus and fog from MTSAT daytime data as a prerequisite for Yellow Sea fog detection. Remote Sens. 2015, 8, 8. [Google Scholar] [CrossRef]
- Mahdavi, S.; Amani, M.; Bullock, T.; Beale, S. A probability-based daytime algorithm for sea fog detection using GOES-16 imagery. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2020, 14, 1363–1373. [Google Scholar] [CrossRef]
- Du, P.; Zeng, Z.; Zhang, J.; Liu, L.; Yang, J.; Qu, C.; Jiang, L.; Liu, S. Fog season risk assessment for maritime transportation systems exploiting Himawari-8 data: A case study in Bohai Sea, China. Remote Sens. 2021, 13, 3530. [Google Scholar] [CrossRef]
- Ahn, M.; Sohn, E.; Hwang, B. A new algorithm for sea fog/stratus detection using GMS-5 IR data. Adv. Atmos. Sci. 2003, 20, 899–913. [Google Scholar] [CrossRef]
- Fu, G.; Guo, J.; Pendergrass, A.; Li, P. An analysis and modeling study of a sea fog event over the Yellow and Bohai Seas. J. Ocean Univ. 2008, 7, 27–34. [Google Scholar] [CrossRef]
- Zhang, S.; Yi, L. A comprehensive dynamic threshold algorithm for daytime sea fog retrieval over the Chinese adjacent seas. Pure Appl. Geophys. 2013, 170, 1931–1944. [Google Scholar] [CrossRef]
- Yang, J.; Yoo, J.; Choi, Y. Advanced dual-satellite method for detection of low stratus and fog near Japan at dawn from FY-4A and Himawari-8. Remote Sens. 2021, 13, 1042. [Google Scholar] [CrossRef]
- Han, J.; Suh, M.; Yu, H.; Roh, N. Development of fog detection algorithm using GK2A/AMI and ground data. Remote Sens. 2020, 12, 3181. [Google Scholar] [CrossRef]
- Ryu, H.; Hong, S. Sea fog detection based on Normalized Difference Snow Index using advanced Himawari imager observations. Remote Sens. 2020, 12, 1521. [Google Scholar] [CrossRef]
- Wu, X.; Li, S. Automatic sea fog detection over Chinese adjacent oceans using Terra/MODIS data. Int. J. Remote Sens. 2014, 35, 7430–7457. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Hirahara, N.; Sonogashira, M.; Iiyama, M. Cloud-free sea-surface-temperature image reconstruction from anomaly inpainting network. IEEE Trans. Geosci. Remote Sens. 2021, 60, 4203811. [Google Scholar] [CrossRef]
- Jing, Y.; Lin, L.; Li, X.; Li, T.; Shen, H. Cascaded downscaling–calibration networks for satellite precipitation estimation. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1506105. [Google Scholar] [CrossRef]
- Zhu, S.; Wang, X.; Jiao, D.; Zhang, Y.; Liu, J. Spatial Downscaling of GPM Satellite Precipitation Data Using Extreme Random Trees. Atmosphere 2023, 14, 1489. [Google Scholar] [CrossRef]
- Sachindra, D.A.; Ahmed, K.; Rashid, M.M.; Shahid, S.; Perera, B. Statistical downscaling of precipitation using machine learning techniques. Atmos. Res. 2018, 212, 240–258. [Google Scholar] [CrossRef]
- Jing, Y.; Lin, L.; Li, X.; Li, T.; Shen, H. An attention mechanism based convolutional network for satellite precipitation downscaling over China. J. Hydrol. 2022, 613, 128388. [Google Scholar] [CrossRef]
- Glawion, L.; Polz, J.; Kunstmann, H.; Fersch, B.; Chwala, C. spateGAN: Spatio-temporal downscaling of rainfall fields using a cGAN approach. Earth Space Sci. 2023, 10, e2023EA002906. [Google Scholar] [CrossRef]
- Sha, Y.; Gagne Ii, D.J.; West, G.; Stull, R. Deep-learning-based gridded downscaling of surface meteorological variables in complex terrain. Part II: Daily precipitation. J. Appl. Meteorol. Climatol. 2020, 59, 2075–2092. [Google Scholar] [CrossRef]
- Jeon, H.; Kim, S.; Edwin, J.; Yang, C. Sea fog identification from GOCI images using CNN transfer learning models. Electronics 2020, 9, 311. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, K.; Li, X. Dual-branch neural network for sea fog detection in geostationary ocean color imager. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4208617. [Google Scholar] [CrossRef]
- Tang, Y.; Yang, P.; Zhou, Z.; Zhao, X. Daytime Sea Fog Detection Based on a Two-Stage Neural Network. Remote Sens. 2022, 14, 5570. [Google Scholar] [CrossRef]
- Wang, Y.; Qiu, Z.; Zhao, D.; Ali, M.A.; Hu, C.; Zhang, Y.; Liao, K. Automatic detection of daytime sea fog based on supervised classification techniques for fy-3d satellite. Remote Sens. 2023, 15, 2283. [Google Scholar] [CrossRef]
- Lu, H.; Ma, Y.; Zhang, S.; Yu, X.; Zhang, J. Daytime Sea Fog Identification Based on Multi-Satellite Information and the ECA-TransUnet Model. Remote Sens. 2023, 15, 3949. [Google Scholar] [CrossRef]
- Hu, S.Z.; Wang, Z.C.; Zhang, X.F.; Tao, F.; Ding, H.X.; Li, C.N. Analysis of Sea Fog Echo Characteristics and Visibility Inversion of Millimeter-Wave Radar. Meteor Mon. 2022, 48, 1270–1280. [Google Scholar]
- Hu, S.Z.; Cao, X.Z.; Tao, F.; Zhang, X.F. Comparative Analysis of Cloud Macro Characteristics from Two ShipbornedMillimeter Wave Cloud Radars in the West Pacific. Meteor Mon. 2020, 46, 745–752. [Google Scholar]
- Uematsu, A.; Hashiguchi, H.; Teshiba, M.; Tanaka, H.; Hirashima, K.; Fukao, S. Moving cellular structure of fog echoes obtained with a millimeter-wave scanning Doppler radar at Kushiro, Japan. J. Appl. Meteorol. Climatol. 2005, 44, 1260–1273. [Google Scholar] [CrossRef]
- Gultepe, I.; Pearson, G.; Milbrandt, J.A.; Hansen, B.; Platnick, S.; Taylor, P.; Gordon, M.; Oakley, J.P.; Cober, S.G. The fog remote sensing and modeling field project. Bull. Amer. Meteorol. Soc. 2009, 90, 341–360. [Google Scholar] [CrossRef]
- Boers, R.; Baltink, H.K.; Hemink, H.J.; Bosveld, F.C.; Moerman, M. Ground-based observations and modeling of the visibility and radar reflectivity in a radiation fog layer. J. Atmos. Ocean. Technol. 2013, 30, 288–300. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. In Kdd; University of Munich: München, Germany, 1996; pp. 226–231. [Google Scholar]
- Krishna, K.; Murty, M.N. Genetic K-means algorithm. IEEE Trans. Syst. Man Cybern. Part B Cybern. 1999, 29, 433–439. [Google Scholar] [CrossRef] [PubMed]
- Scikit-Learn. Available online: https://scikit-learn.org/stable/auto_examples/release_highlights/plot_release_highlights_1_1_0.html (accessed on 16 August 2024).
- Python. Available online: https://www.python.org/ (accessed on 16 August 2024).
- Bringi, V.N.; Chandrasekar, V. Polarimetric Doppler Weather Radar: Principles and Applications; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- Pearson, K.X. On the criterion that a given system of deviations from the probable in the case of a correlated system of variables is such that it can be reasonably supposed to have arisen from random sampling. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1900, 50, 157–175. [Google Scholar] [CrossRef]
- Fisher, R.A. On the interpretation of χ2 from contingency tables, and the calculation of P. J. R. Stat. Soc. 1922, 85, 87–94. [Google Scholar] [CrossRef]
- Cochran, W.G. The χ2 test of goodness of fit. Ann. Math. Stat. 1952, 23, 315–345. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Cover, T.; Hart, P. Nearest neighbor pattern classification. IEEE Trans. Inf. Theory 1967, 13, 21–27. [Google Scholar] [CrossRef]
- Zhang, H. The optimality of naive Bayes. Aa 2004, 1, 3. [Google Scholar]
- Cox, D.R. The regression analysis of binary sequences. J. R. Stat. Soc. Ser. B Stat. Methodol. 1958, 20, 215–232. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. Xgboost: A scalable tree boosting system. In Proceedings of the 22nd ACM Sigkdd International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- XGBoost. Available online: https://xgboost.readthedocs.io/en/release_2.0.0/python/python_intro.html (accessed on 16 August 2024).
- Pytorch. Available online: https://pytorch.org/get-started/previous-versions/ (accessed on 16 August 2024).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Parameter | Indicator |
|---|---|---|
| Antenna | Diameter/m | 1.8 |
| Gain/dB | 53 | |
| Beam width/(°) | 0.39 | |
| Operating mode | Single transmit and receive | |
| Transmitter | Frequency band | 35 GHz ± 100 MHz |
| Peak power/W | 130 | |
| Pulse width/μs | 1, 5, 20 | |
| Pulse repetition frequency/Hz | 1000~10,000 | |
| Receiver | Linear dynamic range/dB | 80 |
| Noise figure/dB | 5.2 | |
| Gain/dB | 37.2 | |
| Final product | Reflectivity factor/dBz | −50~40 |
| Radial velocity/(m·s−1) | −17~17 | |
| Velocity spectrum width/(m·s−1) | 0~8 | |
| Radial velocity ambiguity/dB | −30~5 |
| p-Value | ||
|---|---|---|
| Reflectivity Factor | Velocity Spectrum Width | |
| Mean | 1 × 10−6 | 0.001 |
| Standard deviation | 0.001 | 0.258 |
| Minimum | 1 × 10−6 | 0.008 |
| 1/4 quartile | 1 × 10−6 | 0.018 |
| 2/4 quartile | 1 × 10−6 | 0.005 |
| 3/4 quartile | 1 × 10−6 | 0.001 |
| Maximum | 1 × 10−6 | 0.940 |
| ACC | POD | FAR | |
|---|---|---|---|
| SVM | 92.77% | 93.15% | 8.45% |
| KNN | 92.63% | 93.12% | 8.68% |
| GaussianNB | 92.65% | 93.20% | 8.72% |
| LR | 93.09% | 95.78% | 9.91% |
| XGBoost | 93.40% | 96.42% | 9.84% |
| SFRCNN | 94.90% | 97.59% | 8.00% |
| ACC | POD | FAR | |
|---|---|---|---|
| SVM | 94.74% | 95.66% | 6.73% |
| KNN | 94.49% | 95.40% | 6.99% |
| GaussianNB | 94.21% | 95.28% | 7.44% |
| LR | 94.89% | 97.66% | 8.07% |
| XGBoost | 94.93% | 98.01% | 8.27% |
| SFRCNN | 96.94% | 99.24% | 5.50% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, T.; Qiu, J.; Xue, J. Sea Fog Recognition near Coastline Using Millimeter-Wave Radar Based on Machine Learning. Atmosphere 2024, 15, 1031. https://doi.org/10.3390/atmos15091031
Li T, Qiu J, Xue J. Sea Fog Recognition near Coastline Using Millimeter-Wave Radar Based on Machine Learning. Atmosphere. 2024; 15(9):1031. https://doi.org/10.3390/atmos15091031
Chicago/Turabian StyleLi, Tao, Jianhua Qiu, and Jianjun Xue. 2024. "Sea Fog Recognition near Coastline Using Millimeter-Wave Radar Based on Machine Learning" Atmosphere 15, no. 9: 1031. https://doi.org/10.3390/atmos15091031
APA StyleLi, T., Qiu, J., & Xue, J. (2024). Sea Fog Recognition near Coastline Using Millimeter-Wave Radar Based on Machine Learning. Atmosphere, 15(9), 1031. https://doi.org/10.3390/atmos15091031