
GNSS Real-Time ZTD/PWV Retrieval Based on PPP with Broadcast Ephemerides
Abstract
1. Introduction
2. Data and Methods
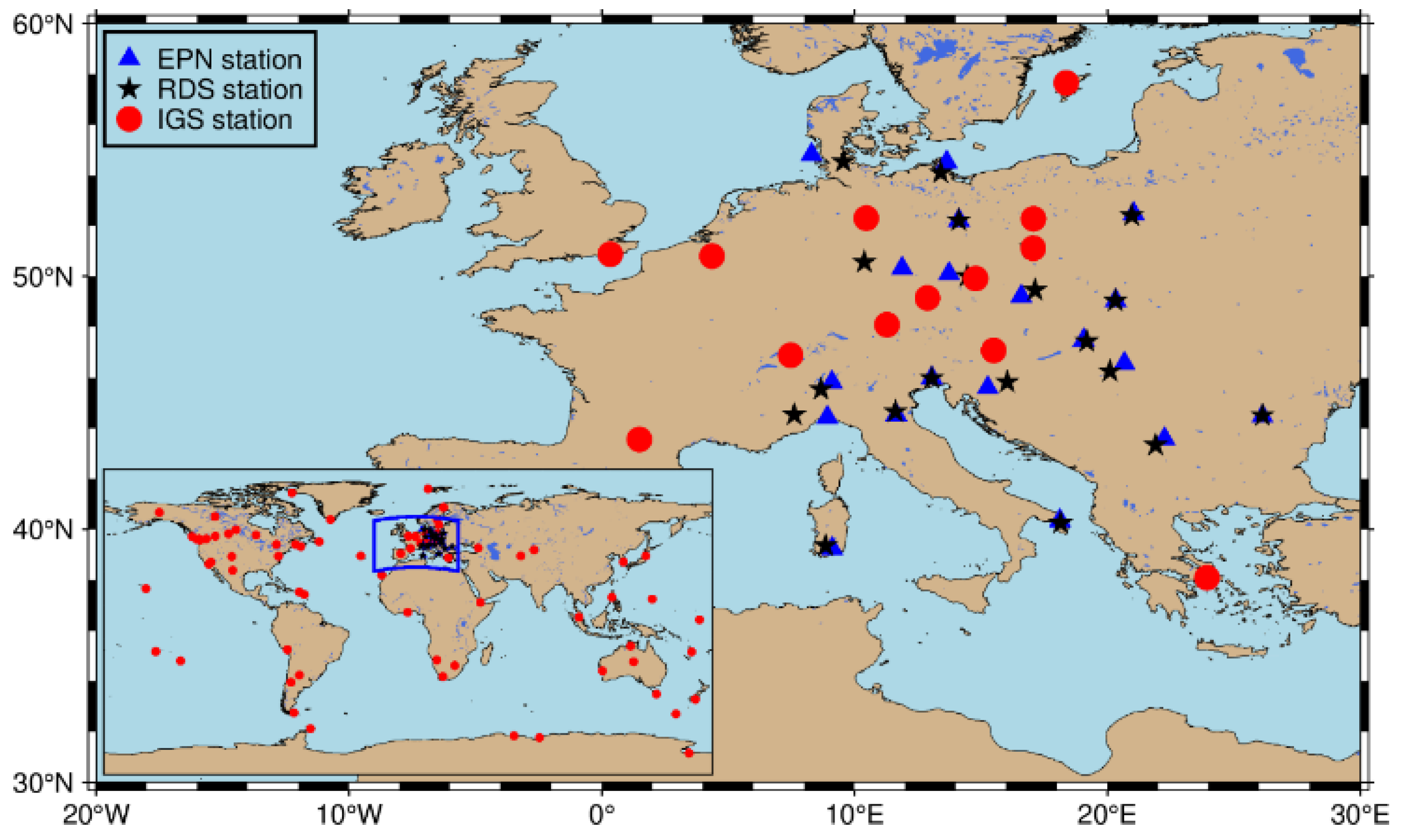
2.1. Datasets
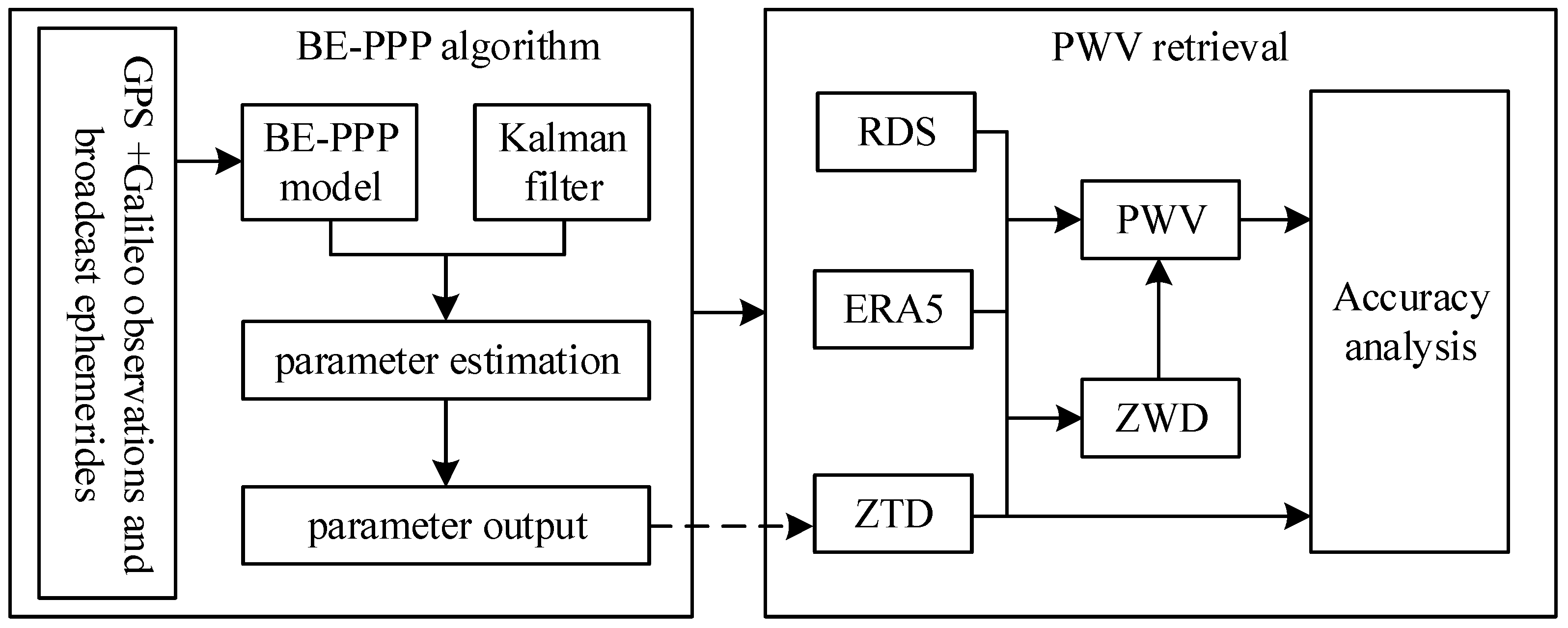
2.2. Technological Route
2.3. GNSS ZTD/PWV Retrieval Based on BE-PPP
- (1)
- ZTD estimation: Based on the carrier and pseudorange raw observation equations, the ionosphere-free combined BE-PPP raw equation can be obtained in the following form [29]:
- (2)
- PWV retrieval:
- (3)
- PWV retrieval based on ERA5: ERA5 is the fifth-generation atmospheric reanalysis dataset of the global climate from January 1940 to the present, produced by the ECMWF. The retrieval in this case utilized the relative humidity, air pressure, and temperature from the ERA5 hourly data on a pressure-level dataset to calculate the PWV. The formula is as follows:
- (4)
- PWV retrieval based on radiosondes: The University of Wyoming Atmospheric Science Radiosonde Archive (uwyo.edu) provides radiosonde data for global international exchange stations. The data files include atmospheric pressure, altitude, temperature, dew point temperature, relative humidity, wind direction, and water vapor mixing ratio for each layer. Using the water vapor mixing ratio , the specific humidity can be calculated as follows:
3. Results and Discussion
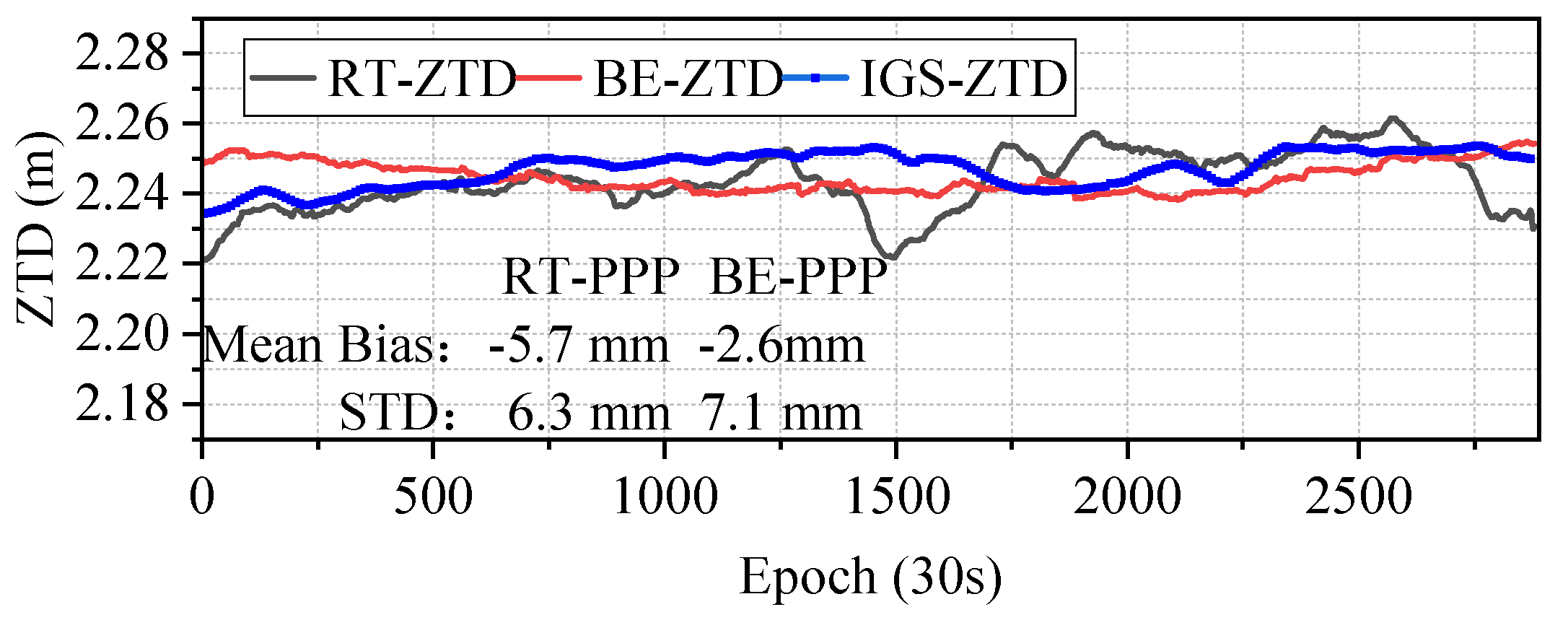
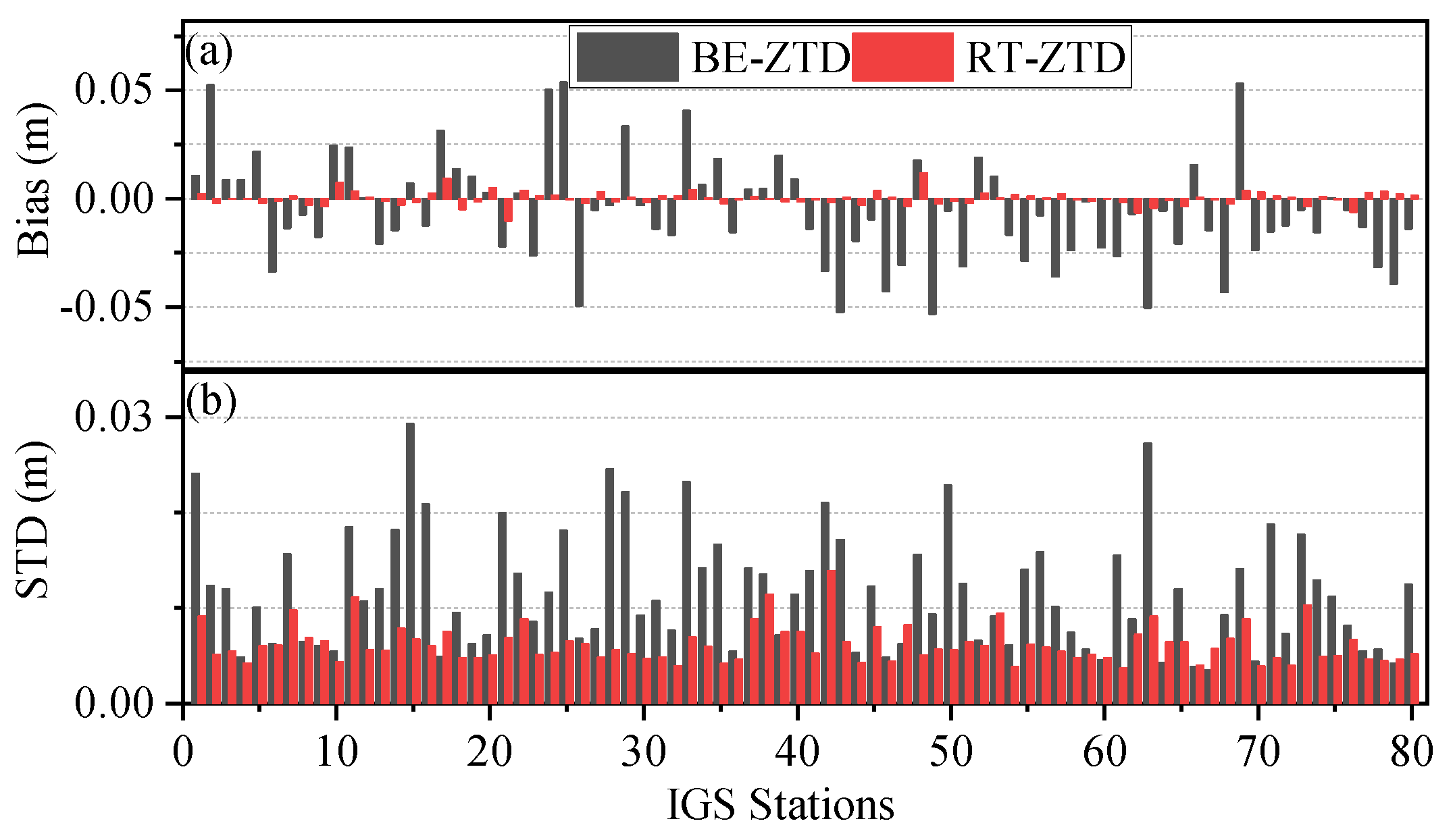
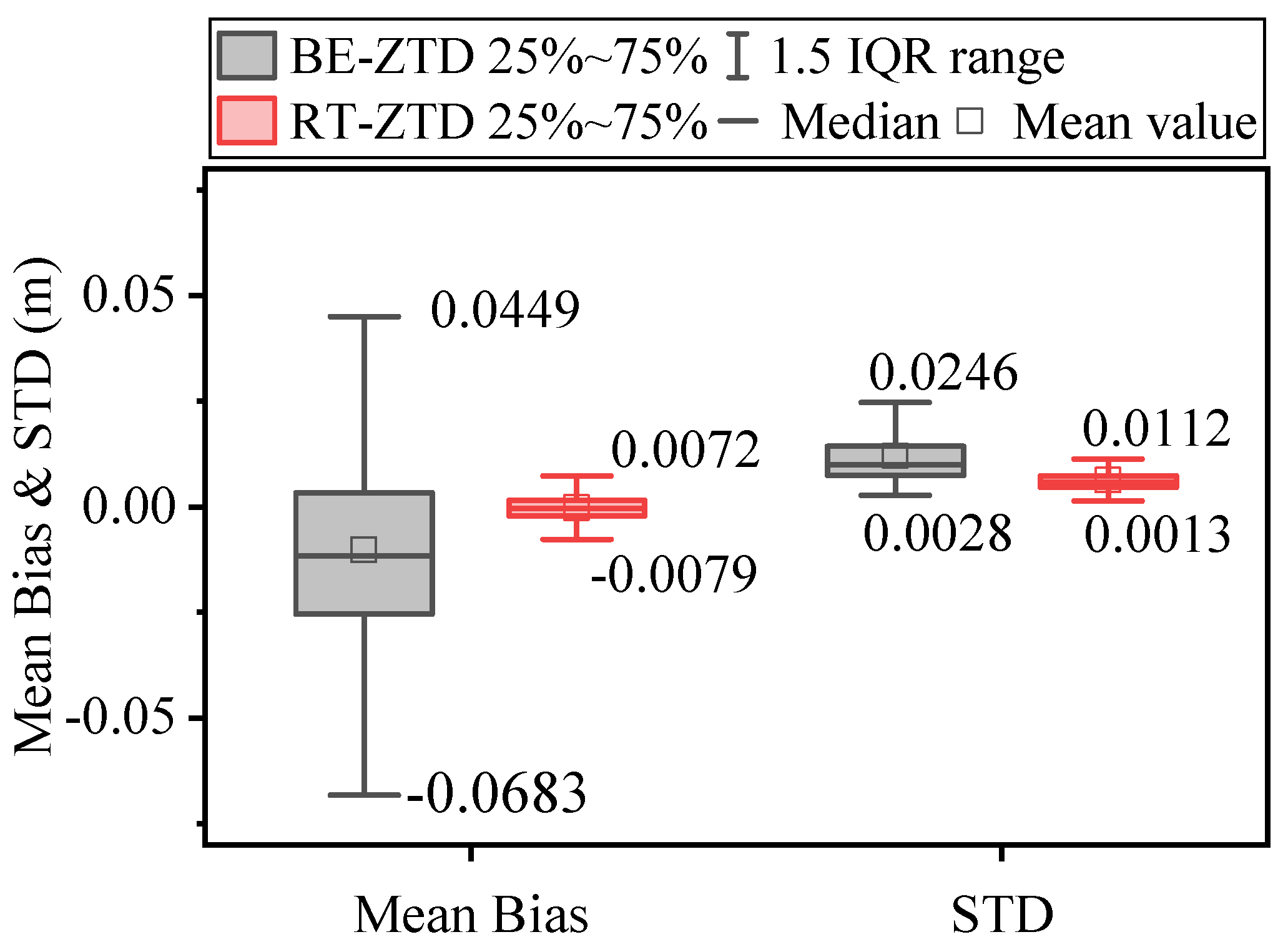
3.1. Evaluation of Real-Time ZTD
3.2. Evaluation of the PWVs Derived from BE-PPP
- (1)
- Validation with ERA5: For the validation of the PWV derived from BE-PPP, the PWV series retrieved from RT-PPP and BE-PPP processing were compared with the series from ERA5. The temporal resolution of the RT-PPP and BE-PPP PWV solutions was 30 s, while the PWV derived from ERA5 was 1 h. To avoid additional interpolation, only PWV retrieval at common epochs of each PWV series was taken into account for the comparison. Figure 7 shows the PWV comparisons of BE-PPP, RT-PPP, and ERA5 for 720 consecutive hours at the EPN station SAS2.
- (2)
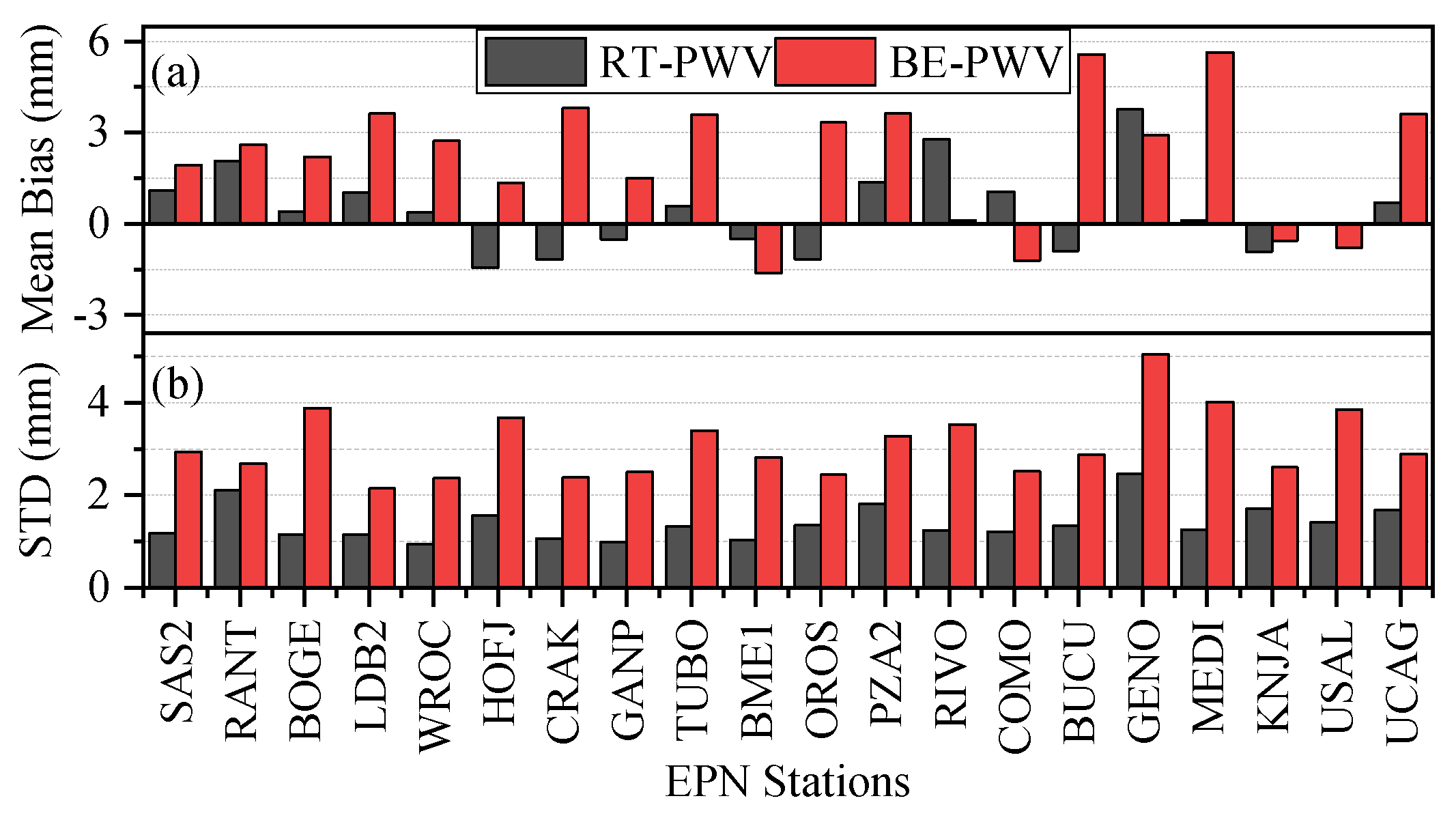
- Validation with radiosondes: The PWV values derived from the BE-PPP and RT-PPP analysis compared to the RDS PWV were also validated. Figure 9 presents the PWV results obtained from the BE-PPP, RT-PPP, and RDS solutions at station SAS2. Since the RDS provides PWV data every 12 or 24 h, the comparison of the BE-PWV, RT-PWV, and RDS-PWV is performed at common time intervals. It can be observed that both BE-PPP and RT-PPP accurately estimate the PWV, with differences within a few millimeters compared to the RDS-PWV. Additionally, the STD of the PWV differences between these two methods is approximately 0.56 mm. The mean value and STD of the PWV differences for the BE-PPP and RT-PPP solutions with respect to the RDS solution from 20 EPN stations in Europe with nearby RDS launch sites are presented in Figure 10. In subgraph (a), it can be observed that the mean bias of the BE-PWV ranges from −1.61 mm to 6.57 mm, while the mean bias of the RT-PWV ranges from −1.17 mm to 3.77 mm. At most stations, the mean bias of the RT-PWV is smaller than that of the BE-PWV. Subgraph (b) illustrates the variation in the STD among the stations, with a range of 2.15 mm to 4.96 mm for the BE-PWV and 0.93 mm to 2.45 mm for the RT-PWV. It is noteworthy that the stability of the RT-PWV surpasses that of the BE-PWV, as indicated by the lower STD values across all the stations examined. The average biases across all 20 stations were found to be 0.43 mm for the RT-PWV and 2.55 mm for the BE-PWV, while the average STD values were determined to be 1.39 mm for the RT-PWV and 3.09 mm for the BE-PWV, which satisfy the accuracy requirements. This is consistent with the mean bias of 2 mm and STD of 2.5 mm [39].
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Heffernan, O. Water vapour warming. Nat. Rep. Clim. Change 2010, 1003, 24. [Google Scholar] [CrossRef]
- Absolute Accuracy of Water Vapor Measurements from Six Operational Radiosonde Types Launched during AWEX-G and Implications for AIRS Validation-Miloshevich-2006-Journal of Geophysical Research: Atmospheres-Wiley Online Library [WWW Document]. Available online: https://agupubs.onlinelibrary.wiley.com/doi/full/10.1029/2005JD006083 (accessed on 3 August 2024).
- Mattar, C.; Sobrino, J.A.; Julien, Y.; Morales, L. Trends in column integrated water vapour over Europe from 1973 to 2003. Int. J. Climatol. 2011, 31, 1749–1757. [Google Scholar] [CrossRef]
- Iwabuchi, T.; Naito, I.; Mannoji, N. A comparison of Global Positioning System retrieved precipitable water vapor with the numerical weather prediction analysis data over the Japanese Islands. J. Geophys. Res. 2000, 105, 4573–4585. [Google Scholar] [CrossRef]
- Beckman, B. A water-vapor radiometer error model. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 474–478. [Google Scholar] [CrossRef]
- Elgered, G.; Davis, J.L.; Herring, T.A.; Shapiro, I.I. Geodesy by radio interferometry: Water vapor radiometry for estimation of the wet delay. J. Geophys. Res. 1991, 96, 6541–6555. [Google Scholar] [CrossRef]
- Straub, C.; Murk, A.; Kämpfer, N. MIAWARA-C, a new ground based water vapor radiometer for measurement campaigns. Atmos. Meas. Tech. 2010, 3, 1271–1285. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology: Remote sensing of atmospheric water vapor using the global positioning system. J. Geophys. Res. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Li, X.; Zus, F.; Lu, C.; Dick, G.; Ning, T.; Ge, M.; Wickert, J.; Schuh, H. Retrieving of atmospheric parameters from multi-GNSS in real time: Validation with water vapor radiometer and numerical weather model. JGR Atmos. 2015, 120, 7189–7204. [Google Scholar] [CrossRef]
- Vaquero-Martínez, J.; Anton, M.; Román, R.; Cachorro, V.E.; Wang, H.; Abad, G.G.; Ritter, C. Water vapor satellite products in the European Arctic: An inter-comparison against GNSS data. Sci. Total Environ. 2020, 741, 140335. [Google Scholar] [CrossRef] [PubMed]
- He, S.; Becker, D.; Hobiger, T. The impact of GNSS multipath errors on ZTD estimates based on PPP. In Proceedings of the Copernicus Meetings, Potsdam, Germany, 5–8 September 2022. [Google Scholar]
- Lu, C.; Li, X.; Ge, M.; Heinkelmann, R.; Nilsson, T.; Soja, B.; Dick, G.; Schuh, H. Estimation and evaluation of real-time precipitable water vapor from GLONASS and GPS. GPS Solut. 2016, 20, 703–713. [Google Scholar] [CrossRef]
- Lu, C.; Feng, G.; Zheng, Y.; Zhang, K.; Tan, H.; Dick, G.; Wickert, J. Real-time retrieval of precipitable water vapor from Galileo observations by using the MGEX network. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4743–4753. [Google Scholar] [CrossRef]
- Jiang, N.; Gao, Z.; Wu, Y.; Xu, Y.; Xu, T.; Li, S.; Guo, A. PWV Retrieval Performance Evaluation for the Fresh BDS-3 With Multisource Data. Earth Space Sci. 2023, 10, e2023EA002923. [Google Scholar] [CrossRef]
- Nykiel, G.; Wolak, P.; Figurski, M. Atmospheric opacity estimation based on IWV derived from GNSS observations for VLBI applications. GPS Solut. 2018, 22, 9. [Google Scholar] [CrossRef]
- Li, H.; Choy, S.; Wang, X.; Liang, H.; Purwar, S.; Zhang, K. Investigating the Optimal Spatial Resolution for Assimilating GNSS PWV into an NWP System to Improve the Accuracy of Humidity Field. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 6876–6888. [Google Scholar] [CrossRef]
- Zhao, Q.; Liu, K.; Sun, T.; Yao, Y.; Li, Z. A novel regional drought monitoring method using GNSS-derived ZTD and precipitation. Remote Sens. Environ. 2023, 297, 113778. [Google Scholar] [CrossRef]
- Elsobeiey, M.; Al-Harbi, S. Performance of real-time Precise Point Positioning using IGS real-time service. GPS Solut. 2016, 20, 565–571. [Google Scholar] [CrossRef]
- Lu, C.; Chen, X.; Liu, G.; Dick, G.; Wickert, J.; Jiang, X.; Zheng, K.; Schuh, H. Real-time tropospheric delays retrieved from multi-GNSS observations and IGS real-time product streams. Remote Sens. 2017, 9, 1317. [Google Scholar] [CrossRef]
- Shi, J.; Xu, C.; Li, Y.; Gao, Y. Impacts of real-time satellite clock errors on GPS precise point positioning-based troposphere zenith delay estimation. J. Geod. 2015, 89, 747–756. [Google Scholar] [CrossRef]
- Hadas, T.; Hobiger, T.; Hordyniec, P. Considering different recent advancements in GNSS on real-time zenith troposphere estimates. GPS Solut. 2020, 24, 99. [Google Scholar] [CrossRef]
- Zhao, Q.; Wang, W.; Yin, J.; Wu, K.; Zhou, L.; Yao, Y.; Wang, P.; Su, J.; Wang, X.; Wang, H.; et al. Real-time retrieval of high-precision ZTD maps using GNSS observation. Geod. Geodyn. 2024, 15, 1–12. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, K.; Rohm, W.; Choy, S.; Norman, R.; Wang, C. Real-time retrieval of precipitable water vapor from GPS precise point positioning. JGR Atmos. 2014, 119, 10044–10057. [Google Scholar] [CrossRef]
- Tunalı, E. Water vapor monitoring with IGS RTS and GPT3/VMF3 functions over Turkey. Adv. Space Res. 2022, 69, 2376–2390. [Google Scholar] [CrossRef]
- Liu, W.; Zhang, L.; Xiong, S.; Huang, L.; Xie, S.; Liu, L. Investigating the ERA5-Based PWV Products and Identifying the Monsoon Active and Break Spells with Dense GNSS Sites in Guangxi, China. Remote Sens. 2023, 15, 4710. [Google Scholar] [CrossRef]
- Li, H.; Li, X.; Kang, Q. Handling method for outages of IGS real-time service (RTS) in GNSS real-time sensing of atmospheric water vapor. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 8310–8318. [Google Scholar] [CrossRef]
- Yang, H.; He, X.; Ferreira, V.; Ji, S.; Xu, Y.; Song, S. Assessment of precipitable water vapor retrieved from precise point positioning with PPP-B2b service. Earth Sci. Inf. 2023, 16, 315–328. [Google Scholar] [CrossRef]
- Xu, Y.; Zhao, P.; Wang, J.; Meng, X. Performance Assess of BDS-3 PPP-B2b Signal Service and Its Application in Precipitable Water Vapor Retrieval. In China Satellite Navigation Conference (CSNC 2024) Proceedings, Lecture Notes in Electrical Engineering; Yang, C., Xie, J., Eds.; Springer Nature: Singapore, 2024; pp. 118–131. [Google Scholar] [CrossRef]
- Carlin, L.; Hauschild, A.; Montenbruck, O. Precise point positioning with GPS and Galileo broadcast ephemerides. GPS Solut. 2021, 25, 77. [Google Scholar] [CrossRef]
- Chen, G.; Wei, N.; Li, M.; Zhao, Q.; Zhang, J. BDS-3 and GPS/Galileo integrated PPP using broadcast ephemerides. GPS Solut. 2022, 26, 129. [Google Scholar] [CrossRef]
- Haase, J.; Ge, M.; Vedel, H.; Calais, E. Accuracy and variability of GPS tropospheric delay measurements of water vapor in the western Mediterranean. J. Appl. Meteorol. 2003, 42, 1547–1568. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L.; Dai, A.; Van Hove, T.; Van Baelen, J. A near-global, 2-hourly data set of atmospheric precipitable water from ground-based GPS measurements. J. Geophys. Res. 2007, 112, 1–17. [Google Scholar] [CrossRef]
- GPS.GOV. Interface Control Documents: IS-GPS-200[DB/OL] (2022-08-22). Available online: https://www.gps.gov/technical/icwg/IS-GPS-200N.pdf (accessed on 8 July 2024).
- European GNSS Service Centre. Galileo-Open Service-Signal In-Space Interface Control Document (OS SIS ICD v2.1) [DB/OL]. (2023-11). Available online: https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_OS_SIS_ICD_v2.1.pdf (accessed on 8 July 2024).
- Zhou, F.; Dong, D.; Li, W.; Jiang, X.; Wickert, J.; Schuh, H. GAMP: An open-source software of multi-GNSS precise point positioning using undifferenced and uncombined observations. GPS Solut. 2018, 22, 33. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Chiswell, S.; Herring, T.A.; Anthes, R.A.; Rocken, C.; Ware, R.H. GPS meteorology: Mapping zenith wet delays onto precipitable water. J. Appl. Meteorol. 1994, 33, 379–386. [Google Scholar] [CrossRef]
- Yao, Y.; Zhang, B.; Xu, C.; Yan, F. Improved one/multi-parameter models that consider seasonal and geographic variations for estimating weighted mean temperature in ground-based GPS meteorology. J. Geod. 2014, 88, 273–282. [Google Scholar] [CrossRef]
- Ahmed, F.; Václavovic, P.; Teferle, F.N.; Douša, J.; Bingley, R.; Laurichesse, D. Comparative analysis of real-time precise point positioning zenith total delay estimates. GPS Solut. 2016, 20, 187–199. [Google Scholar] [CrossRef]
- Pan, L.; Deng, M.; Chen, B. Real-time GNSS meteorology: A promising alternative using real-time PPP technique based on broadcast ephemerides and the open service of Galileo. GPS Solut. 2024, 28, 113. [Google Scholar] [CrossRef]
- De Haan, S.; Pottiaux, E.; Sánchez-Arriola, J.; Bender, M.; Berckmans, J.; Brenot, H.; Bruyninx, C.; De Cruz, L.; Dick, G.; Dymarska, N.; et al. Use of GNSS Tropospheric Products for High-Resolution, Rapid-Update NWP and Severe Weather Forecasting (Working Group 2). In Advanced GNSS Tropospheric Products for Monitoring Severe Weather Events and Climate; Jones, J., Guerova, G., Douša, J., Dick, G., De Haan, S., Pottiaux, E., Bock, O., Pacione, R., Van Malderen, R., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 203–265. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Description |
|---|---|
| Observations | Ionospheric-free combinations of GPS/Galileo carrier phase and pseudorange, 30 s sampling, 7-degree cutoff elevation |
| Satellite orbits and clocks | Only broadcast ephemerides |
| Pseudorange noise | G: 5 mm; E: 5 mm |
| Phase noise | G: 1 m; E: 0.5 m |
| Filter | Backward–forward KF |
| Tropospheric delay | Prior value from Saastamoinen and the global mapping function (GMF), and remaining errors estimated as random walk noise; of 6 mm, of 3600 s |
| Ionospheric delay | First order was eliminated by ionospheric-free combination, and higher orders ignored |
| Receiver clock | Estimated as white noise with of 60 m |
| Inter-system bias | Estimated as white noise with of 60 m |
| Ambiguity | Float ambiguity is estimated as a time constant with a of 10 m |
| Signal-in-space error (SISE) | Priori constraint of 0.5 m, estimated as random walk noise; : GPS of 0.5 m, Galileo of 0.2 m; : GPS of 10 mm, Galileo of 3 mm, of 30 s [30] |
| Tide models | Solid earth tide, polar tide model (IERS Conversion 2010), ocean tide model (i.e., FES2004) |
| Receiver antenna phase center | IGS absolute phase center calibration (i.e., igs20.atx) |
| Satellite antenna phase center | None [29] |
| Other corrections | Relativistic effect, Sagnac effect, satellite antenna phase wind-up corrections |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Liu, S.; Xu, Y.; Tang, L.; Yang, N.; Zhang, G. GNSS Real-Time ZTD/PWV Retrieval Based on PPP with Broadcast Ephemerides. Atmosphere 2024, 15, 1030. https://doi.org/10.3390/atmos15091030
Xu Z, Liu S, Xu Y, Tang L, Yang N, Zhang G. GNSS Real-Time ZTD/PWV Retrieval Based on PPP with Broadcast Ephemerides. Atmosphere. 2024; 15(9):1030. https://doi.org/10.3390/atmos15091030
Chicago/Turabian StyleXu, Zongqiu, Shuhao Liu, Yantian Xu, Longjiang Tang, Nannan Yang, and Gen Zhang. 2024. "GNSS Real-Time ZTD/PWV Retrieval Based on PPP with Broadcast Ephemerides" Atmosphere 15, no. 9: 1030. https://doi.org/10.3390/atmos15091030
APA StyleXu, Z., Liu, S., Xu, Y., Tang, L., Yang, N., & Zhang, G. (2024). GNSS Real-Time ZTD/PWV Retrieval Based on PPP with Broadcast Ephemerides. Atmosphere, 15(9), 1030. https://doi.org/10.3390/atmos15091030