
Future Low-Cost Urban Air Quality Monitoring Networks: Insights from the EU’s AirHeritage Project

 ,
,  ,
,  ,
,  , ,
, ,  , and
, and
Abstract
1. Introduction
- The development of a hybrid regulatory/LCAQMS network that integrates fixed and mobile opportunistic monitoring approaches;
- The integration of multiple (37) LCAQMS units from different producers;
- The implementation of multiseasonal repeated field calibration (using reference analyzers) and multiseasonal/multisite deployment;
- The use of edge computing for local and real-time concentration estimation and reporting through a smartphone app.
- The availability of user data (each user can download its own recorded raw and processed data while exploring its exposure data through advanced real-time and remote HCI using appropriate AQ index)
- Open data (comprising co-location and operative deployment data): anonymized data are available to researchers and users on Zenodo platform for the sake of repeatability, 10.5281/zenodo.13151960
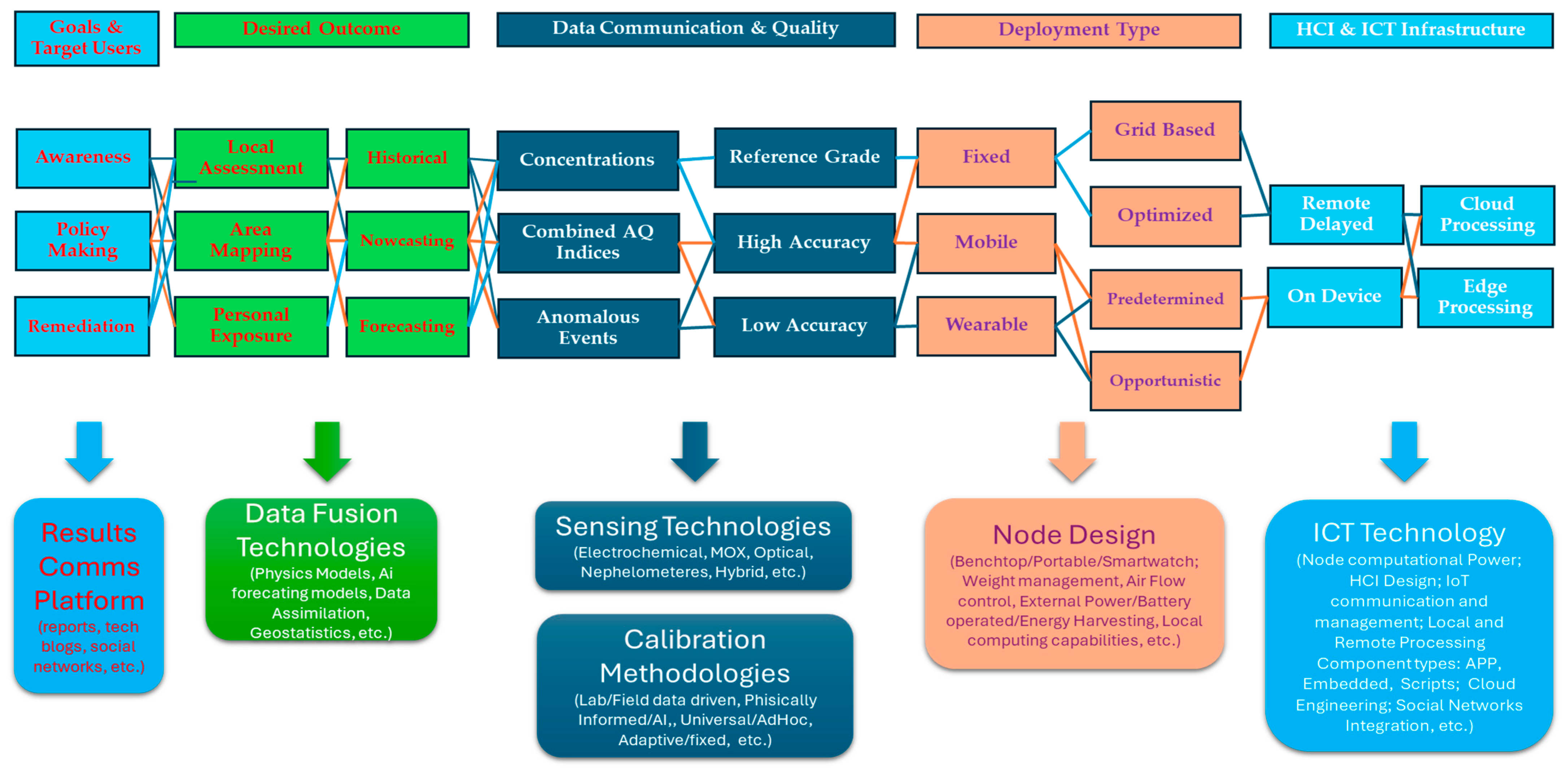
2. Main Challenges in Modern LCAQMS Deployments
3. The MONICA Low-Cost Air Quality Device
3.1. Sensor Selection
3.2. Internal Operations and Power Efficiency
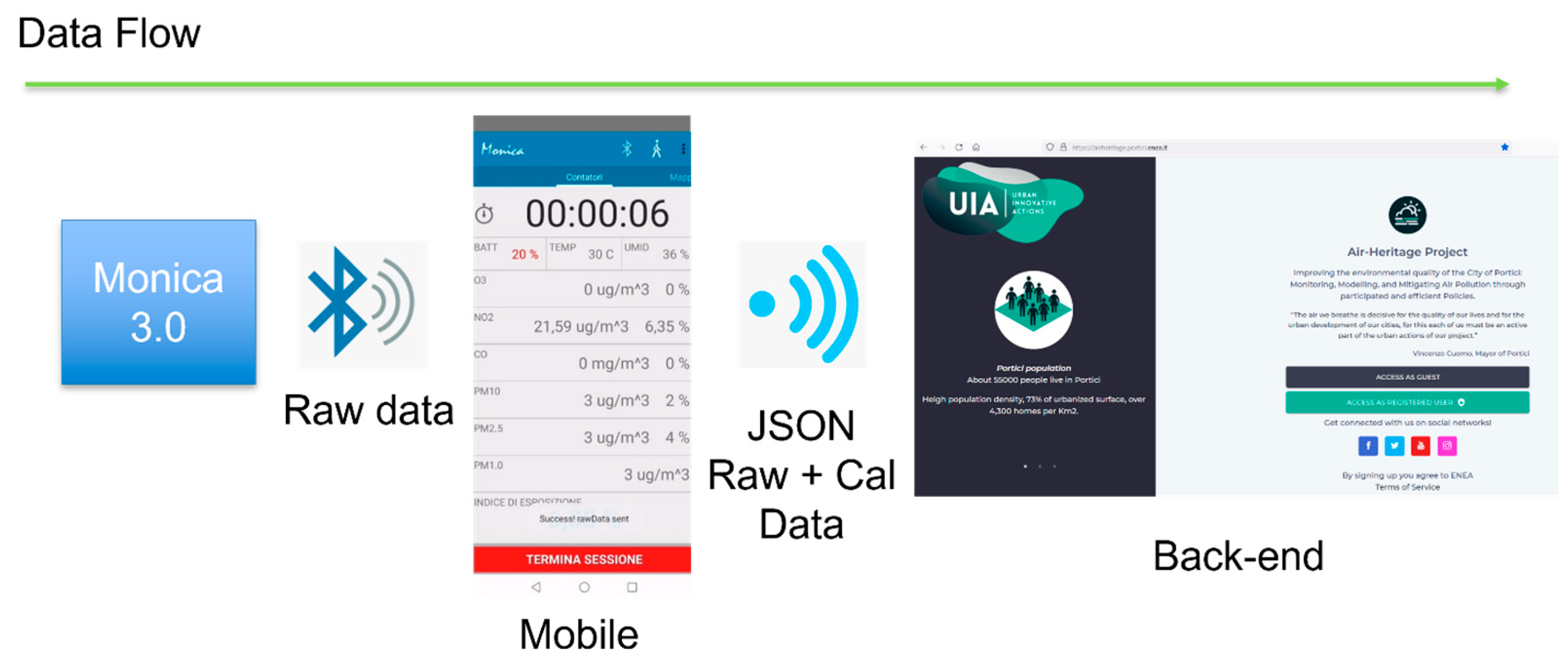
3.3. Communication and Data Transmission
- Georeferencing: the smartphone’s GPS data can be used to geotag the collected air quality measurements, providing a critical spatial context for the collected data.
- Calibration implementation: calibration algorithms can be run on the smartphone to ensure the accuracy of sensor readings over time.
- Data transmission to the IoT back-end: the smartphone acts as a bridge, seamlessly transmitting the collected and processed air quality data to the central IoT back-end for further analysis and visualization.
3.4. Considerations on the MONICA Design Outcomes and Recomendations
- Extended Mobile Operation: the low-power and comfortable-to-wear design choices ensure the MONICA device can work for extended periods without needing a recharge, making it ideal for mobile deployments in diverse environments.
- Accurate and Comprehensive Monitoring: the combination of various sensor technologies allows for the measurement of a broad range of air pollutants, providing a more holistic picture of air quality.
- Seamless Data Collection and Transmission: BLE connectivity with smartphones facilitates convenient data collection, georeferencing, calibration, and transmission to the central data storage and analysis platform.
4. Laboratory Characterization of MONICA Devices
4.1. Procedures for Laboratory Characterization and Calibration
4.2. Results and Performance Improvement Suggestions
5. Comprehensive Software Platform Development
5.1. Basic Software Requirements
- ENEA MONICA sensors nodes operating at high sampling rates (about 3.5 s min sampling period set to 6 s);
- Commercial fixed stations by Digiteco srl [24], with data sampled every minute and transmitted every 15 min.
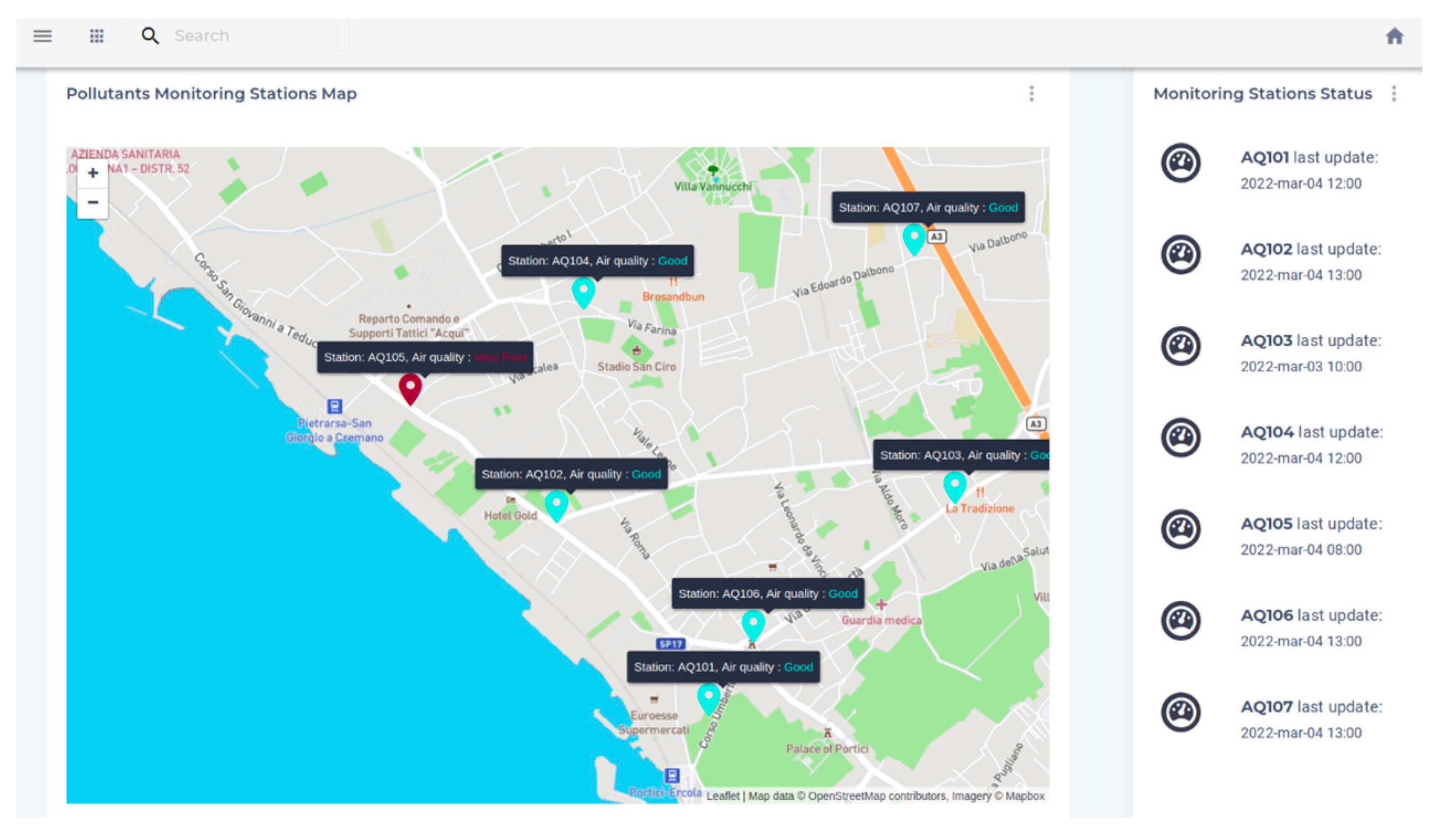
- An interactive map displaying the status of fixed stations, with the air quality index (AQI) updated every 15 min, based on MQTT data.
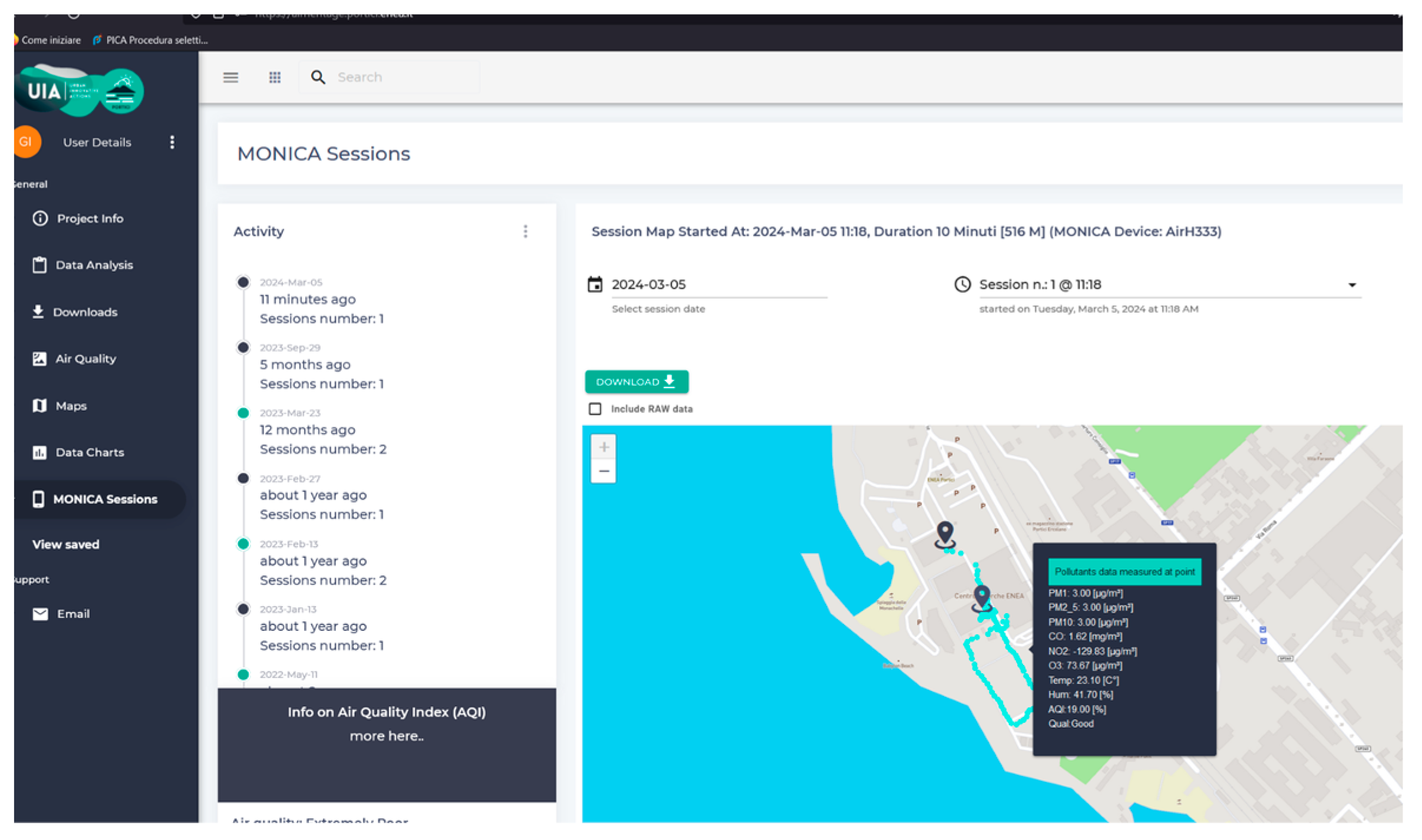
- The ability to download data in CSV format from fixed stations or specific sessions.
- Effective database management to maintain performance over time, even with multiple devices and extended MONICA sessions.
- Adherence to FAIR (Findability, Accessibility, Interoperability, and Reuse) principles for data access [29].
- Incorporation of best practices for service exposure and addressing cybersecurity concerns, including authentication and authorization.
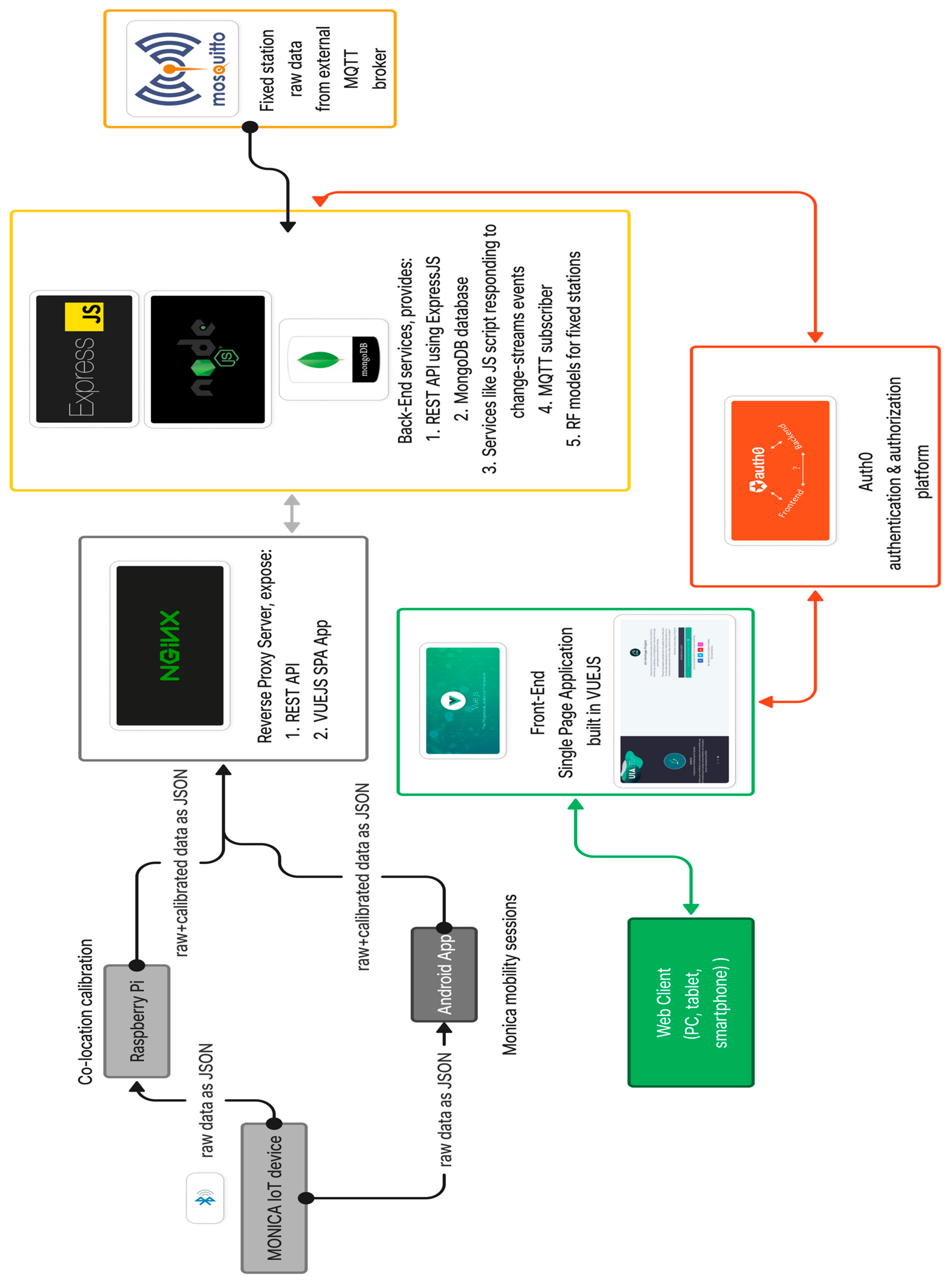
5.2. Architecture of the Developed Software Platform
- ▪ Social login using Facebook, Google, Twitter (now X);
- ▪ Account defined on Auth0 servers.
5.3. Data Management and Associated Monitoring Services
- MONICA sessions raw data;
- MONICA sessions calibrated data;
- Fixed stations raw data, factory calibrated data, and calibrated data using RF;
- Derived stats for all the above collections, populated automatically thanks to the change streams feature of MongoDB;
- AQI data derived from data at point 4, thanks to the change streams feature and a JS code (executed in NodeJS) to compute the AQI index (with color reference);
- Stats data by user for the citizen pricing campaign, computed using a JS app reacting to events generated by MongoDB change streams.
5.4. Software Integration and Utilization: Lessons Learned and Recommendations
- The JSON serialization format could effectively be replaced by Protobuf for transmitting data from the Android/Raspberry Pi device to the cloud/remote server. This change could allow for more efficient data transmission, as Protobuf messages are much smaller in size compared to JSON (from 20% to 80% smaller than equivalent JSON messages) and this can reduce system latency [44].
- MQTT is definitely the preferred protocol for use at OSI layer 4 instead of HTTP [45].
- MongoDB was a valid and effective solution. However, current versions of MongoDB (especially starting from v.7 and later) implement TS collections that simplify code development while automatically handling IoT data in an efficient way. Sadly, this introduces some limitations, such as lack of support for the widely used change streams within the project, document size (4 MB compared to the generic MongoDB document limit of 16 MB), and more [46]. These limitations, hopefully, will be removed in future versions of MongoDB. For data coming from IoT devices, other solutions more tailored to TS data could be preferable, such as TimeScaleDB, InfluxDB, and QuestDB, to name a few.
- The REST API framework used within the project could be replaced with a solution based on a different language, such as Fiber for Go or FASTAPI in Python. However, a NodeJS-based solution is still, in the author’s opinion, a valid choice.
- To further improve scalability and fault tolerance, it could be useful to revisit the entire solution by employing Kubernetes (https://kubernetes.io/), with all services deployed using Docker (https://www.docker.com/) containers and adopting CI/CD practices [47].
- Although the FAIR principles were fulfilled as much as possible, adding an ontology to the data stored in MongoDB could certainly be a very attractive option [48].
6. Effective Logistics Management for Co-Location Campaigns
6.1. General Co-Location Framework
6.2. Logistical Challenges and Implemented Solutions
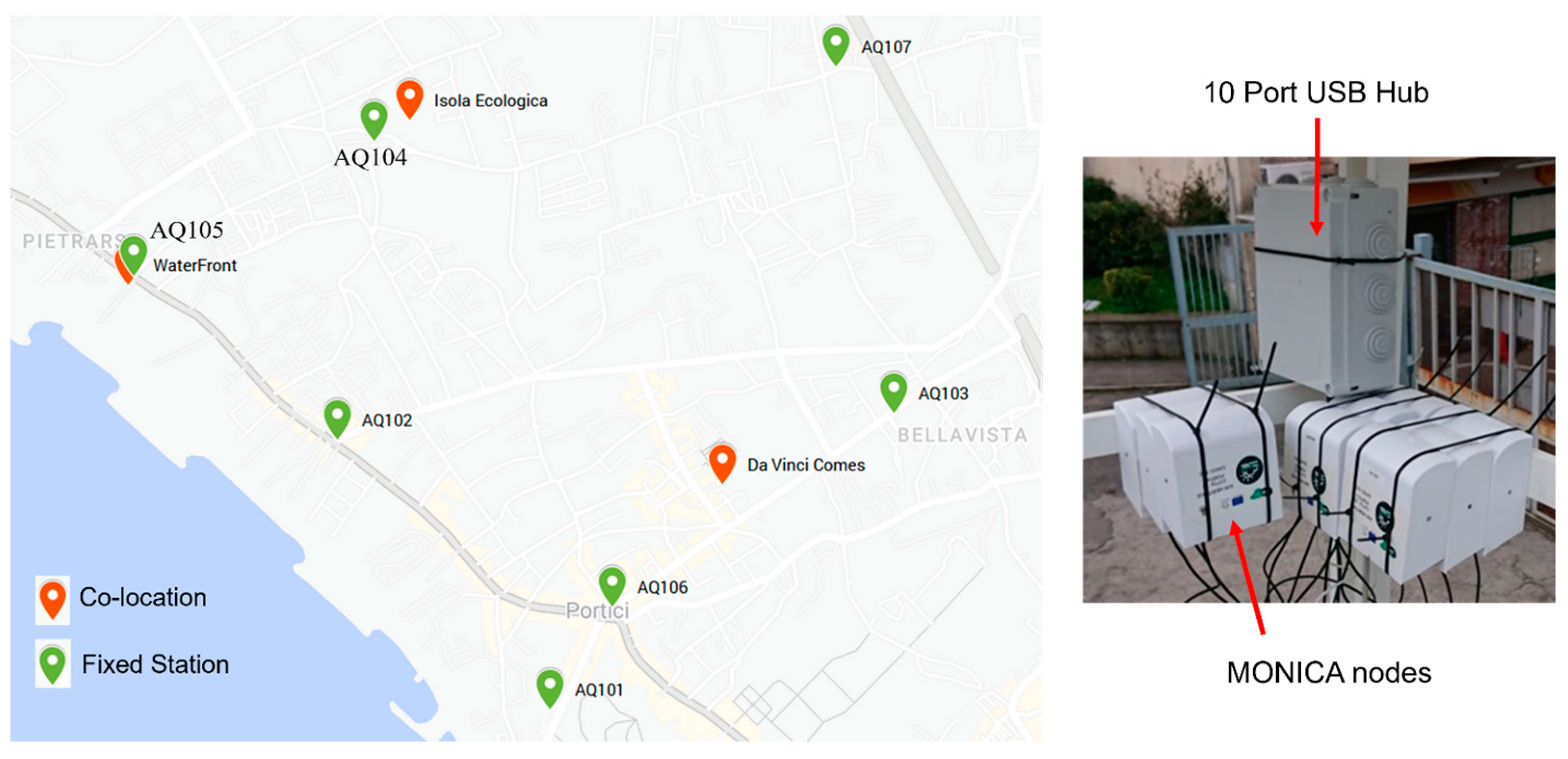
- The placement of the particulate matter instrumentation and other equipment of the institutional-grade mobile laboratory has resulted in a reduction of the available space on the roof of the vehicle, which has in turn constrained the capacity to accommodate the entire fleet of nodes.
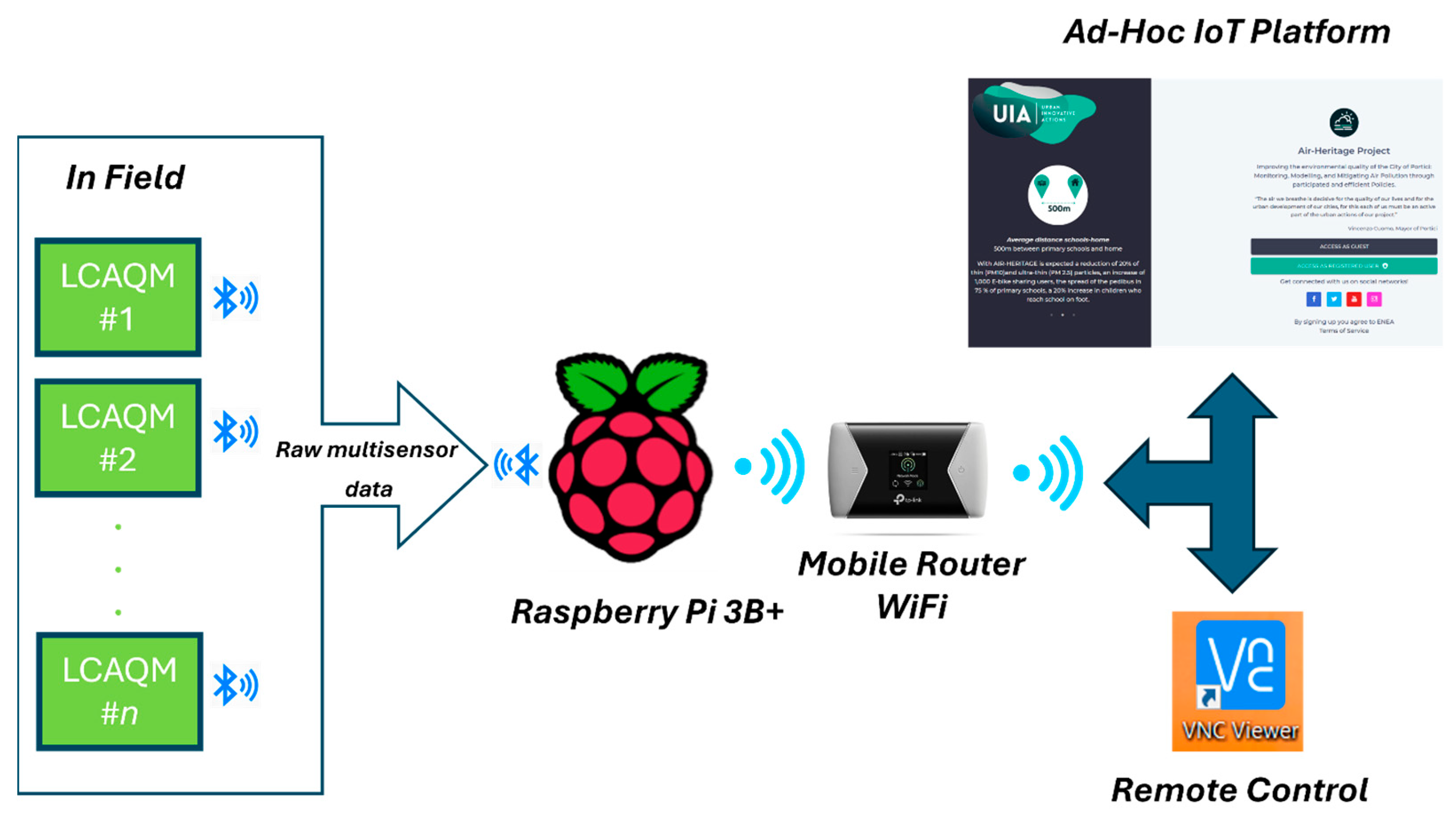
- In order to prevent data loss and collisions between packets during transmission, a maximum of 10 nodes were connected to a single Raspberry Pi, which was employed as a concentrator node for aggregating and forwarding raw data from the nodes to the web server.
6.3. Guidance for Future Co-Location Efforts
7. Calibration and Data Management
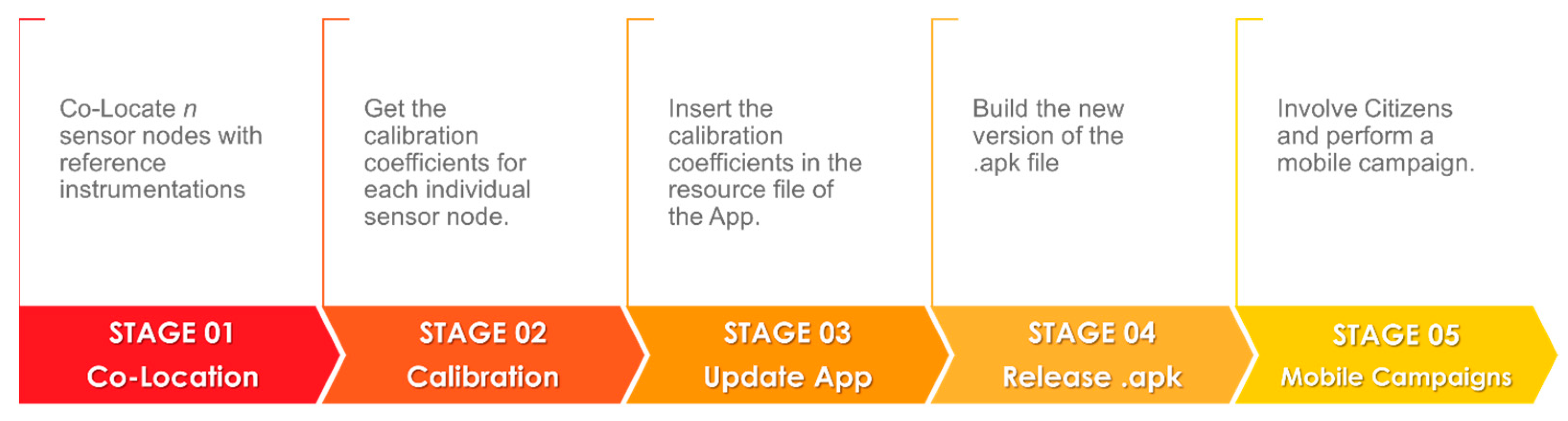
7.1. Low-Cost Sensor Calibration Methods
7.2. Guidance for Calibration Implementation
8. Co-Location Campaign Air Quality Validated Assessment
8.1. First Co-Location Campaign: From 13 January 2021 to 24 March 2021 @ Portici Waterfront
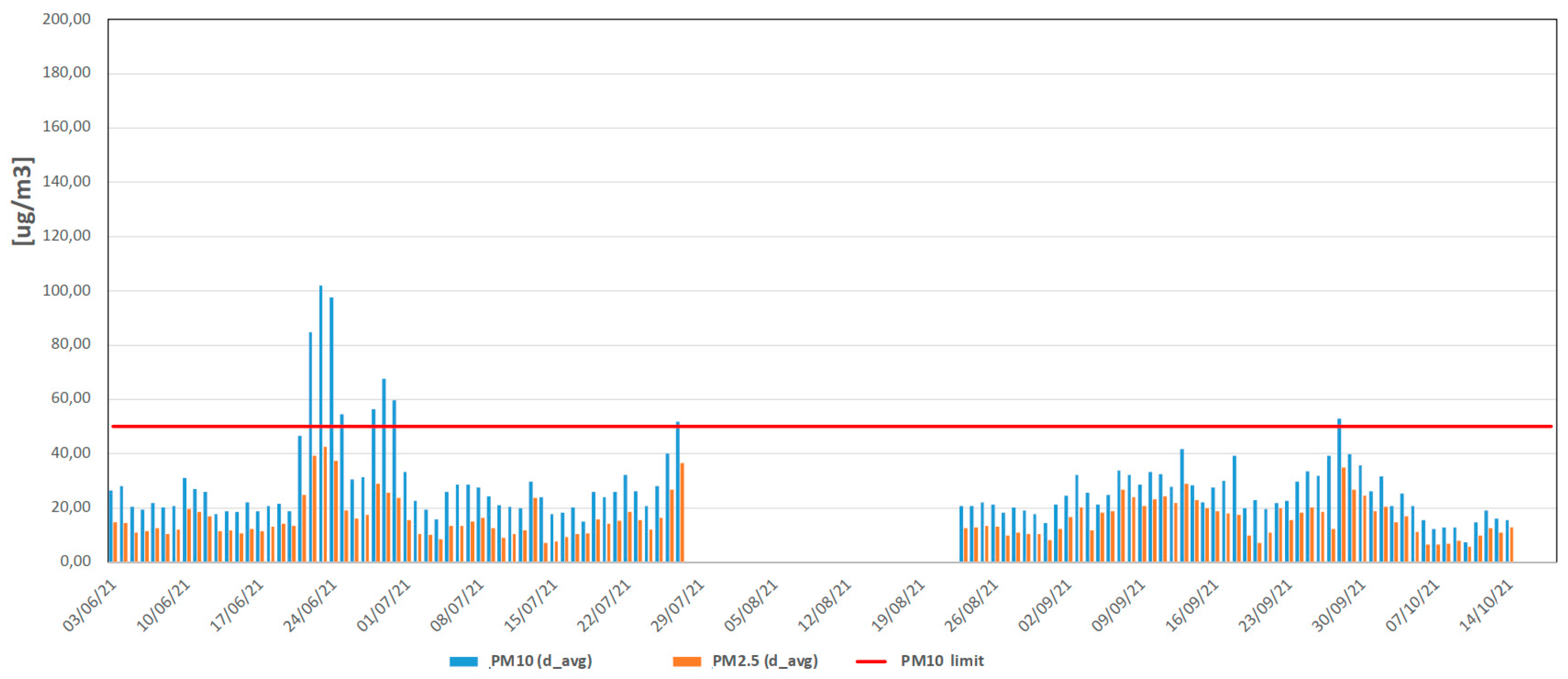
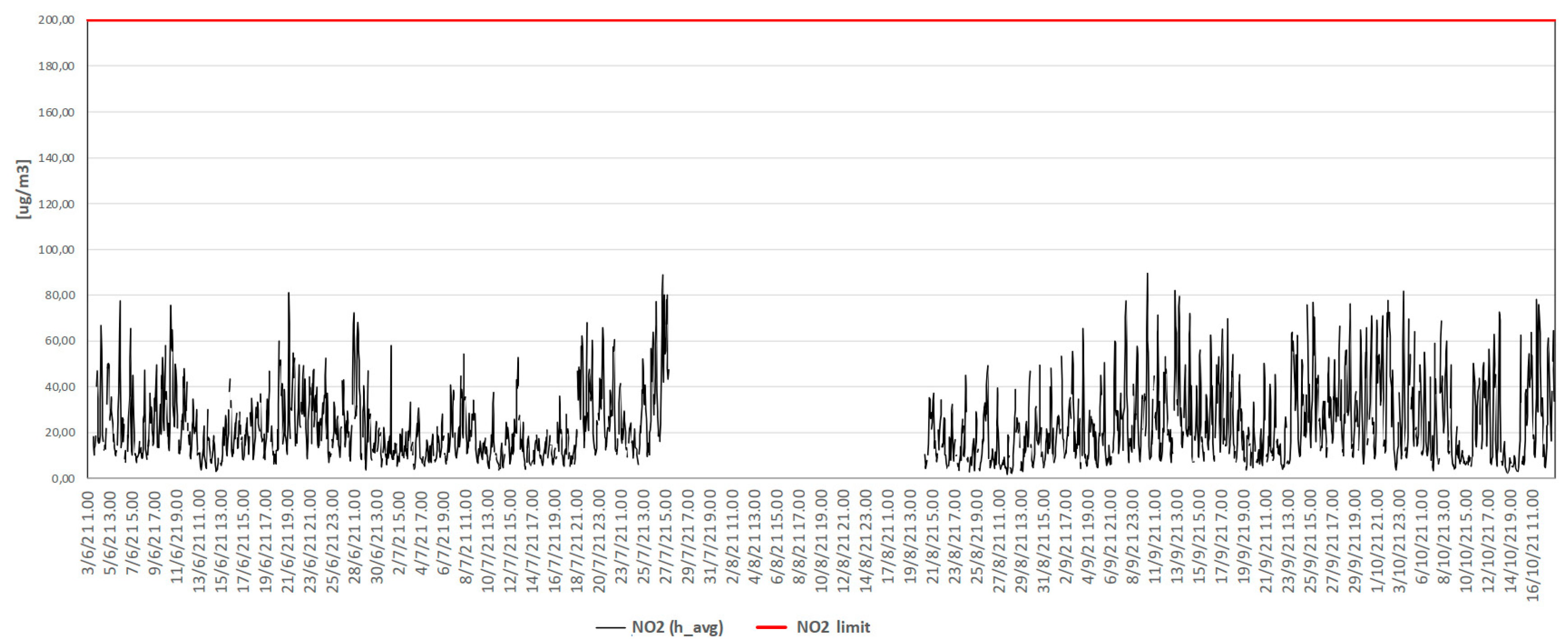
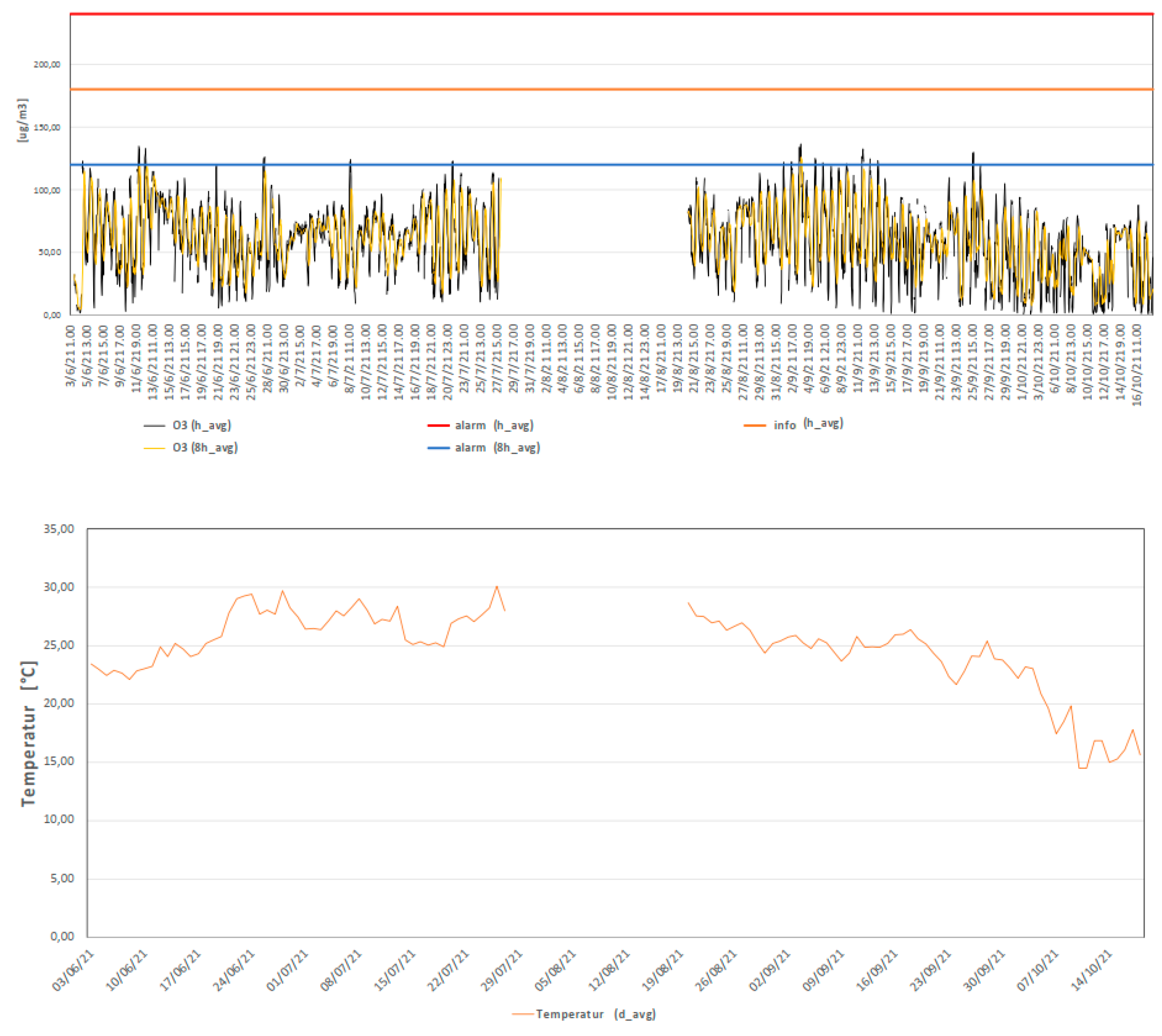
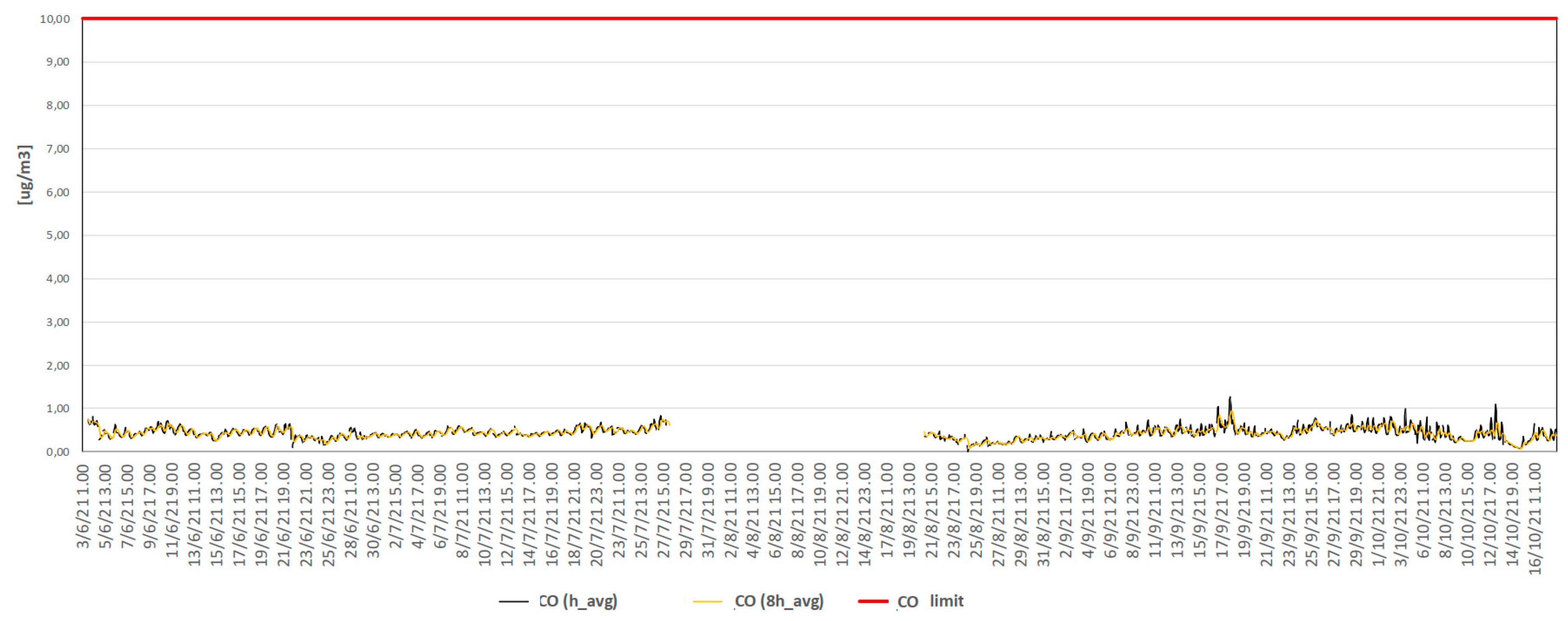
8.2. Second Co-Location Campaign: From 4 July 2021 to 4 October 2021 @ Portici Isola Ecologica
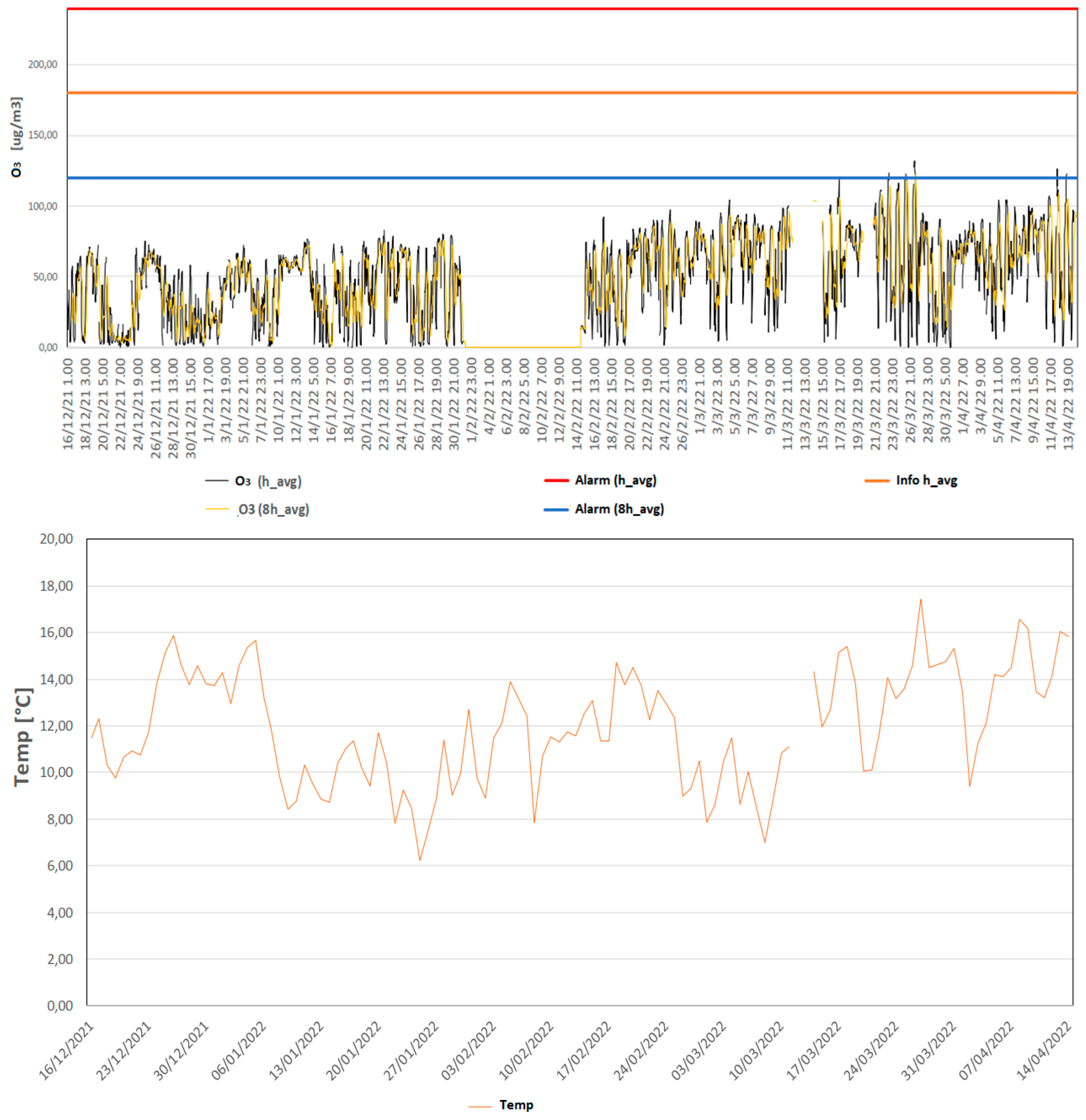
8.3. Third Co-Location Campaign: From 11 January 2022 to 12 April 2022 @ Portici Scuola Da Vinci Comes—Viale Bernini
9. Citizen Engagement Through the MONICA App
9.1. Introduction and Role of the MONICA App in Citizen Engagement
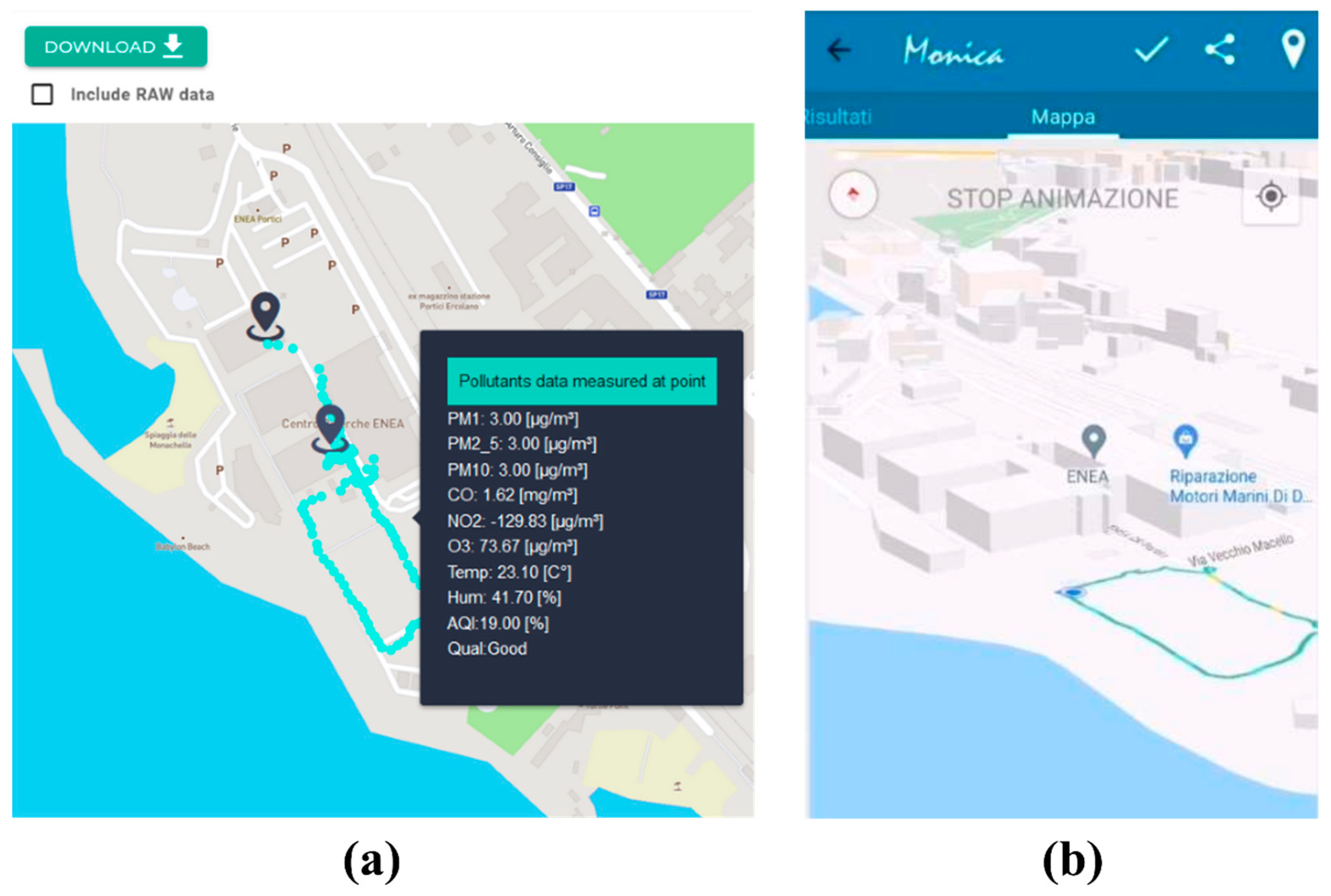
9.2. How the Monica App Works
9.3. Feedback from the Citizen Science Campaigns
10. Impact of Spatial Analysis of Citizen-Generated Data
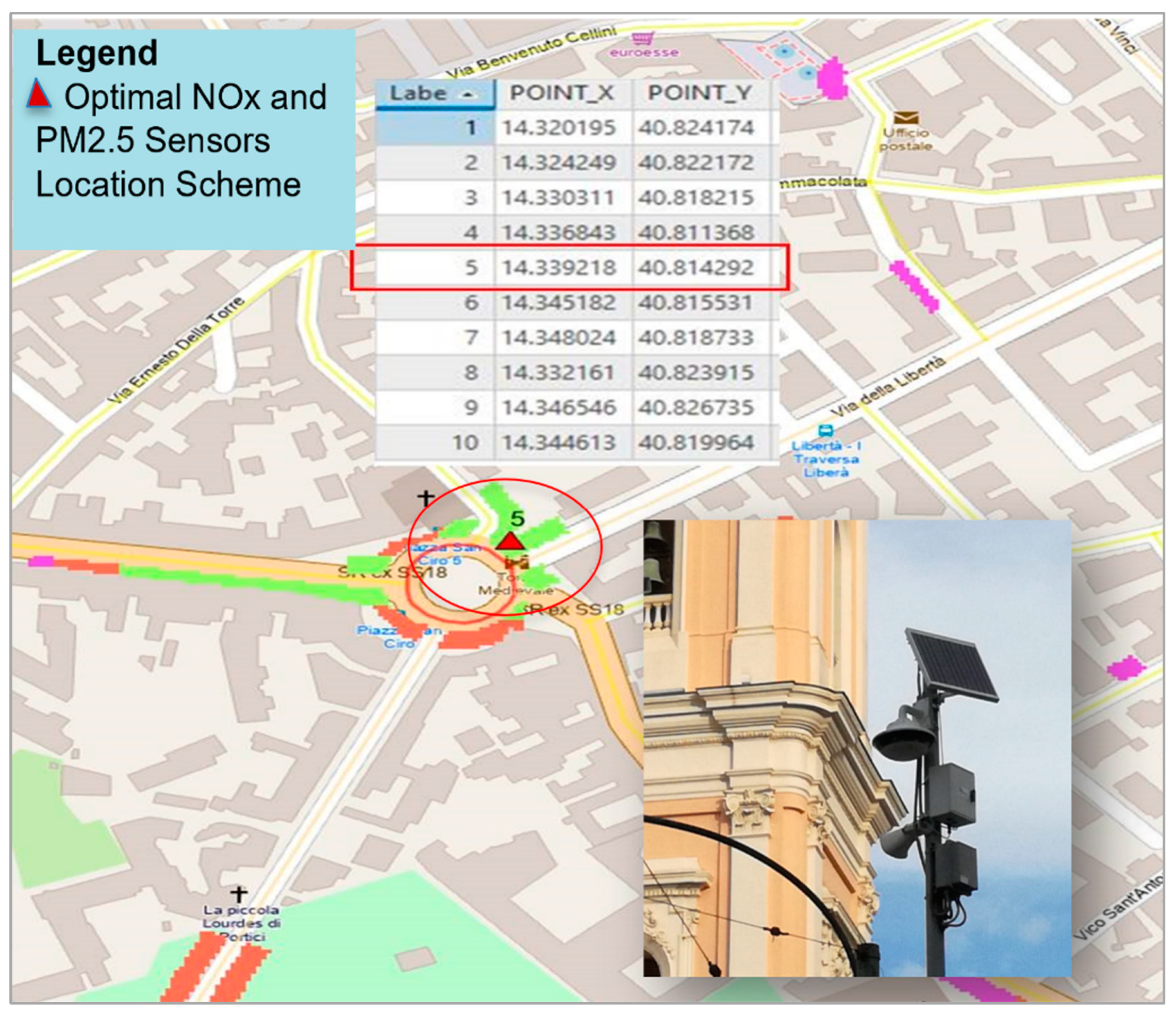
- Low-cost monitoring stations located at the eligible sites can convey information about areas on which space variability is significant, providing informative content which is actually lacking for both regulatory monitoring networks and modelling-based approaches for air quality mapping.
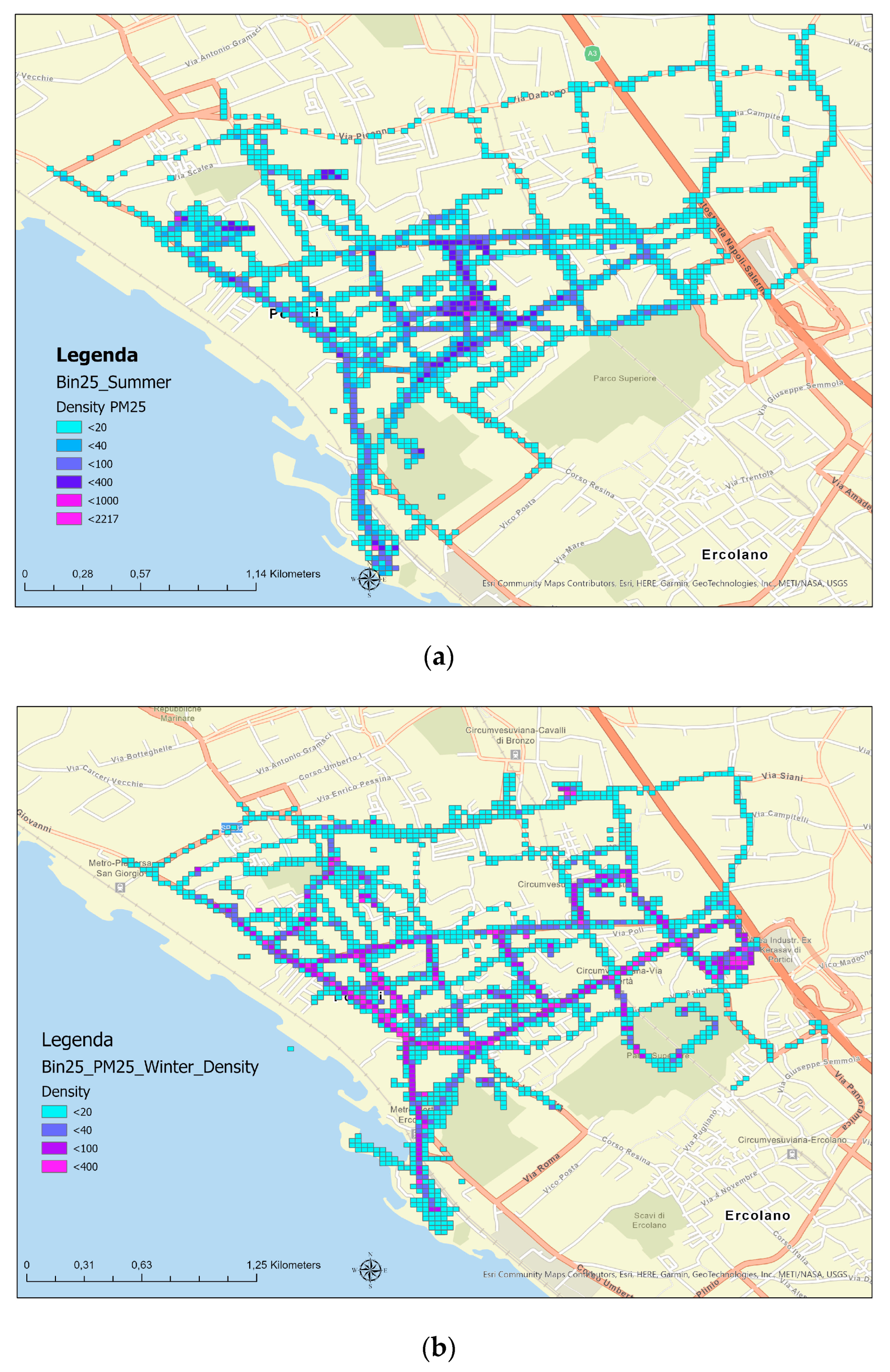
- In addition to the local spatial variability, the temporal variability of air pollutant concentrations has to be taken into account for obtaining more reliable urban air quality scenarios.
- One of the possible limitations to the use of the proposed spatial analysis is its reliance on data. Data could be difficult to obtain such as vehicular flow (simulated or measured) as well as the street canyon effects. In these cases, the use of proxy data could partially solve the issue.
Potential Improvements for Future Geostatistical Studies
11. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- WHO. World Health Statistics 2022, Monitoring Health for the SDGs, Sustainable Development Goals; World Health Organization: Geneva, Switzerland, 2022. [Google Scholar]
- Pascal, M.; Corso, M.; Chanel, O.; Declercq, C.; Badaloni, C.; Cesaroni, G.; Henschel, S.; Meister, K.; Haluza, D.; Martin-Olmedo, P.; et al. Assessing the public health impacts of urban air pollution in 25 European cities: Results of the Aphekom project. Sci. Total Environ. 2013, 449, 390–400. [Google Scholar] [CrossRef] [PubMed]
- Medina, S.; Adélaïde, L.; Wagner, V.; de Crouy Chanel, P.; Real, E.; Colette, A.; Couvidat, F.; Bessagnet, B.; Duron, A.; Host, S.; et al. Impact de Pollution de L’air Ambiant sur la Mortalité en France Métropolitaine RÉDUCTION en Lien Avec le Confinement du Printemps 2020 et Nouvelles Données sur le Poids Total Pour la Période 2016–2019; Santé publique: Paris, France, 2021; p. 63. [Google Scholar]
- Wu, S.; Ni, Y.; Li, H.; Pan, L.; Yang, D.; Baccarelli, A.A.; Deng, F.; Chen, Y.; Shima, M.; Guo, X. Short-term exposure to high ambient air pollution increases airway inflammation and respiratory symptoms in chronic obstructive pulmonary disease patients in Beijing, China. Environ. Int. 2016, 94, 76–82. [Google Scholar] [CrossRef] [PubMed]
- Raaschou-Nielsen, O.; Beelen, R.; Wang, M.; Hoek, G.; Andersen, Z.; Hoffmann, B.; Stafoggia, M.; Samoli, E.; Weinmayr, G.; Dimakopoulou, K.; et al. Particulate matter air pollution components and risk for lung cancer. Environ. Int. 2015, 87, 66–73. [Google Scholar] [CrossRef] [PubMed]
- Latza, U.; Gerdes, S.; Baur, X. Effects of nitrogen dioxide on human health: Systematic review of experimental and epidemiological studies conducted between 2002 and 2006. Int. J. Hyg. Environ. Health 2009, 212, 271–287. [Google Scholar] [CrossRef]
- Kim, S.-Y.; Kim, E.; Kim, W.J. Health Effects of Ozone on Respiratory Diseases. Tuberc. Respir. Dis. 2020, 83 (Suppl. S1), S6–S11. [Google Scholar] [CrossRef] [PubMed] [PubMed Central]
- Zhang, L.-W.; Chen, X.; Xue, X.-D.; Sun, M.; Han, B.; Li, C.-P.; Ma, J.; Yu, H.; Sun, Z.-R.; Zhao, L.-J.; et al. Long-term exposure to high particulate matter pollution and cardiovascular mortality: A 12-year cohort study in four cities in northern China. Environ. Int. 2013, 62, 41–47. [Google Scholar] [CrossRef]
- Díaz-Robles, L.A.; Fu, J.S.; Reed, G.D. Emission scenarios and the health risks posed by priority mobile air toxics in an urban to regional area: An application in Nashville, Tennessee. Aerosol. Air. Qual. Res. 2013, 13, 795–803. [Google Scholar] [CrossRef]
- Testi, I.; Wang, A.; Paul, S.; Mora, S.; Walker, E.; Nyhan, M.; Duarte, F.; Santi, P.; Ratti, C. Big mobility data reveals hyperlocal air pollution exposure disparities in the Bronx, New York. Nat. Cities 2024, 1, 512–521. [Google Scholar] [CrossRef]
- Castell, N.; Kobernus, M.; Liu, H.Y.; Schneider, P.; Lahoz, W.; Berre, A.J.; Noll, J. Noll Mobile technologies and services for environ-mental monitoring: The Citi-Sense-MOB approach. Urban Clim. 2015, 14, 370–382. [Google Scholar] [CrossRef]
- Enhance Environmental Awareness Through Social Information Technologies. Available online: https://cordis.europa.eu/project/id/265432/it (accessed on 1 October 2024).
- Available online: https://cordis.europa.eu/article/id/175088-citizenbased-air-quality-monitoring (accessed on 1 October 2024).
- Stojanović, D.B.; Kleut, D.; Davidović, M.; Živković, M.; Ramadani, U.; Jovanović, M.; Lazović, I.; Jovašević-Stojanović, M. Data Evaluation of a Low-Cost Sensor Network for Atmospheric Particulate Matter Monitoring in 15 Municipalities in Serbia. Sensors 2024, 24, 4052. [Google Scholar] [CrossRef]
- Breathe London. Available online: https://www.breathelondon.org/about (accessed on 1 October 2024).
- Castell, N.; Dauge, F.R.; Schneider, P.; Vogt, M.; Lerner, U.; Fishbain, B.; Broday, D.; Bartonova, A. Can commercial low-cost sensor platforms contribute to air quality monitoring and exposure estimates? Environ. Int. 2017, 99, 293–302. [Google Scholar] [CrossRef] [PubMed]
- Bossche, J.V.D.; Theunis, J.; Elen, B.; Peters, J.; Botteldooren, D.; De Baets, B. Opportunistic mobile air pollution monitoring: A case study with city wardens in Antwerp. Atmos. Environ. 2016, 141, 408–421. [Google Scholar] [CrossRef]
- AirVisual. Available online: https://www.indiegogo.com/projects/airvisual-node-the-world-s-smartest-air-monitor#/ (accessed on 1 October 2024).
- Chukwu, T.M.; Morse, S.; Murphy, R.J. Air quality perceptual index approach: Development and application with data from two Nigerian cities. Environ. Sustain. Indic. 2024, 23, 100418. [Google Scholar] [CrossRef]
- UIA AirHeritage Project Description Page. Available online: https://www.uia-initiative.eu/en/operational-challenges/portici-air-heritage (accessed on 1 August 2024).
- Alphasense UK Website. Available online: https://www.alphasense.com (accessed on 1 August 2024).
- Plantower Company Website. Available online: https://www.plantower.com (accessed on 1 August 2024).
- Teledyne API Website. Available online: https://www.teledyne-api.com/products/nitrogen-compound-instruments/t200 (accessed on 1 August 2024).
- DIGITECO srl Website. Available online: https://www.digiteco.it (accessed on 1 August 2024).
- Feng, Z.; Zheng, L.; Ren, B.; Liu, D.; Huang, J.; Xue, N. Feasibility of Low-Cost Particulate Matter Sensors For Long-Term Environmental Monitoring: Field Evaluation and Calibration. Sci. Total. Environ. 2024, 945, 174089. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Du, Y.; Wang, J.; Li, T. Calibration of a Low-Cost Pm2.5 Monitor Using a Random Forest Model. Environ. Int. 2019, 133, 105161. [Google Scholar] [CrossRef]
- Cordero, J.M.; Borge, R.; Narros, A. Using Statistical Methods to Carry out in Field Calibrations of Low Cost Air Quality Sensors. Sens. Actuators B Chem. 2018, 267, 245–254. [Google Scholar] [CrossRef]
- Sá, J.; Chojer, H.; Branco, P.; Alvim-Ferraz, M.; Martins, F.; Sousa, S. Two Step Calibration Method For Ozone Low-Cost Sensor: Field Experiences with the UrbanSense DCUs. J. Environ. Manag. 2023, 328, 116910. [Google Scholar] [CrossRef]
- Wilkinson, M.D.; Dumontier, M.; Aalbersberg, I.J.; Appleton, G.; Axton, M.; Baak, A.; Blomberg, N.; Boiten, J.W.; da Silva Santos, L.B.; Bourne, P.E.; et al. The Fair Guiding Principles for Scientific Data Management and Stewardship. Sci. Data 2016, 3, 160018. [Google Scholar] [CrossRef]
- What Is REST? REST API Tutorial. Available online: https://restfulapi.net/ (accessed on 29 June 2024).
- Lei, Z.; Zhou, H.; Ye, S.; Hu, W.; Liu, G.-P. Cost-Effective Server-side Re-deployment for Web-based Online Laboratories Using NGINX Reverse Proxy. IFAC-PapersOnline 2020, 53, 17204–17209. [Google Scholar] [CrossRef]
- Bourhis, P.; Reutter, J.L.; Vrgoč, D. JSON: Data model and query languages. Inf. Syst. 2019, 89, 101478. [Google Scholar] [CrossRef]
- How to Get Started with Node.js and Express|DigitalOcean. Available online: https://www.digitalocean.com/community/tutorials/nodejs-express-basics (accessed on 29 June 2024).
- Singh, J.; Chaudhary, N.K. OAuth 2.0: Architectural Design Augmentation for Mitigation of Common Security Vulnerabilities. J. Inf. Secur. Appl. 2022, 65, 103091. [Google Scholar] [CrossRef]
- Auth0 Overview. Available online: https://auth0.com/docs/get-started/auth0-overview (accessed on 29 June 2024).
- Register Machine-to-Machine Applications. Available online: https://auth0.com/docs/get-started/auth0-overview/create-applications/machine-to-machine-apps (accessed on 29 June 2024).
- Change Streams & Triggers with Node.js Tutorial|MongoDB. Available online: https://www.mongodb.com/developer/languages/javascript/nodejs-change-streams-triggers/ (accessed on 29 June 2024).
- Shahzad, F. Modern and Responsive Mobile-enabled Web Applications. Procedia Comput. Sci. 2017, 110, 410–415. [Google Scholar] [CrossRef]
- Liu, H.; Li, Q.; Yu, D.; Gu, Y. Air Quality Index and Air Pollutant Concentration Prediction Based on Machine Learning Algorithms. Appl. Sci. 2019, 9, 4069. [Google Scholar] [CrossRef]
- De Vito, S.; Esposito, E.; D’Elia, G.; Del Giudice, A.; Fattoruso, G.; Ferlito, S.; D’Auria, P.; Intini, F.; Di Francia, G.; Terzini, E. High Resolution Air Quality Monitoring with IoT Intelligent Multisensor Devices During COVID-19 Pandemic Phase 2 in Italy. In Proceedings of the 12th AEIT International Annual Conference (AEIT), Catania, Italy, 23–25 September 2020. [Google Scholar]
- Building with Patterns: The Bucket Pattern|MongoDB. Available online: https://www.mongodb.com/developer/products/mongodb/bucket-pattern/ (accessed on 29 June 2024).
- Efficient Error Monitoring: Integrating Sentry in Node.js, Express.js, and MongoDB Backend Rest API Project|Widle Studio LLP. Available online: https://medium.com/widle-studio/enhancing-error-tracking-and-monitoring-integrating-sentry-in-node-js-3f827deffca5 (accessed on 29 June 2024).
- How to Protect an Nginx Server with Fail2Ban on Ubuntu 20.04|Digital Ocean. Available online: https://www.digitalocean.com/community/tutorials/how-to-protect-an-nginx-server-with-fail2ban-on-ubuntu-20-04 (accessed on 29 June 2024).
- Is Protobuf Much Faster than Json Even in Simple Web Server Response Requests?|by Kuentra Official|Medium. Available online: https://medium.com/@kn2414e/is-protocol-buffers-protobuf-really-lighter-and-faster-compared-to-json-681c6bee5d93 (accessed on 29 June 2024).
- Masdani, M.V.; Darlis, D. A Comprehensive Study on Mqtt as a Low Power Protocol for Internet of Things Application. IOP Conf. Series Mater. Sci. Eng. 2018, 434, 012274. [Google Scholar] [CrossRef]
- Time Series Collection Limitations—MongoDB Manual v7.0. Available online: https://www.mongodb.com/docs/manual/core/timeseries/timeseries-limitations/ (accessed on 29 June 2024).
- Improving Scalability of Cloud-Based IoT Application with Microservice Architecture Using Massively Distributed Kuber-Netes Cluster|Request PDF. Available online: https://www.researchgate.net/publication/346443549_Improving_Scalability_of_Cloud-based_IoT_Application_with_Microservice_Architecture_using_Massively_Distributed_Kubernetes_Cluster (accessed on 29 June 2024).
- Rani, F.; Wang, X.; Mutlu, I.; Urbas, L. A Centralized MongoDB-Based Repository Design for IIoT Data: The ecoKI Project*. IFAC-PapersOnLine 2023, 56, 3184–3189. [Google Scholar] [CrossRef]
- Schneider, P.; Vogt, M.; Haugen, R.; Hassani, A.; Castell, N.; Dauge, F.R.; Bartonova, A. Deployment and Evaluation of a Network of Open Low-Cost Air Quality Sensor Systems. Atmosphere 2023, 14, 540. [Google Scholar] [CrossRef]
- Malings, C.; Tanzer, R.; Hauryliuk, A.; Kumar, S.P.N.; Zimmerman, N.; Kara, L.B.; Presto, A.A.; Subramanian, R. Development of a general calibration model and long-term performance evaluation of low-cost sensors for air pollutant gas monitoring. Atmos. Meas. Tech. 2019, 12, 903–920. [Google Scholar] [CrossRef]
- De Vito, S.; D’Elia, G.; Di Francia, G. Global calibration models match ad-hoc calibrations field performances in low cost particulate matter sensors. In Proceedings of the 2022 IEEE International Symposium on Olfaction and Electronic Nose (ISOEN), Aveiro, Portugal, 29 May–1 June 2022; pp. 1–4. [Google Scholar]
- Smith, K.R.; Edwards, P.M.; Ivatt, P.D.; Lee, J.D.; Squires, F.; Dai, C.; Peltier, R.E.; Evans, M.J.; Sun, Y.; Lewis, A.C. An Im-proved Low-Power Measurement of Ambient NO2 and O3 Combining Electrochemical Sensor Clusters and Machine Learning. Atmos. Meas. Tech. 2019, 12, 1325–1336. [Google Scholar] [CrossRef]
- Swager, T.M.; Mirica, K.A. Introduction: Chemical Sensors. Chem. Rev. 2019, 119, 1–2. [Google Scholar] [CrossRef]
- D’Elia, G.; Ferro, M.; Sommella, P.; De Vito, S.; Ferlito, S.; D’Auria, P.; Di Francia, G. Influence of Concept Drift on Metrological Performance of Low-Cost NO2 Sensors. IEEE Trans. Instrum. Meas. 2022, 71, 1–11. [Google Scholar] [CrossRef]
- Casey, J.G.; Hannigan, M.P. Testing the performance of field calibration techniques for low-cost gas sensors in new de-ployment locations: Across a county line and across Colorado. Atmos. Meas. Tech. 2018, 11, 6351–6378. [Google Scholar] [CrossRef]
- Vikram, S.; Collier-Oxandale, A.; Ostertag, M.H.; Menarini, M.; Chermak, C.; Dasgupta, S.; Rosing, T.; Hannigan, M.; Griswold, W.G. Evaluating and improving the reliability of gas-phase sensor system calibrations across new locations for ambient measurements and personal exposure monitoring. Atmos. Meas. Tech. 2019, 12, 4211–4239. [Google Scholar] [CrossRef]
- De Vito, S.; Esposito, E.; Massera, E.; Formisano, F.; Fattoruso, G.; Ferlito, S.; Del Giudice, A.; D’elia, G.; Salvato, M.; Polichetti, T.; et al. Crowdsensing IoT Architecture for Pervasive Air Quality and Exposome Monitoring: Design, Development, Calibration, and Long-Term Validation. Sensors 2021, 21, 5219. [Google Scholar] [CrossRef] [PubMed]
- De Vito, S.; D’elia, G.; Ferlito, S.; Di Francia, G.; Davidović, M.D.; Kleut, D.; Stojanović, D.; Jovaševic-Stojanović, M. A Global Multiunit Calibration as a Method for Large-Scale IoT Particulate Matter Monitoring Systems Deployments. IEEE Trans. Instrum. Meas. 2023, 73, 1–16. [Google Scholar] [CrossRef]
- Zimmerman, N.; Presto, A.A.; Kumar, S.P.N.; Gu, J.; Hauryliuk, A.; Robinson, E.S.; Robinson, A.L.; Subramanian, R. A ma-chine learning calibration model using random forests to improve sensor performance for lower-cost air quality monitoring. Atmos. Meas. Tech. 2018, 11, 291–313. [Google Scholar] [CrossRef]
- Ramel-Delobel, M.; Peruzzi, C.; Coudon, T.; De Vito, S.; Fattoruso, G.; Praud, D.; Fervers, B.; Salizzoni, P. Exposure to airborne particulate matter during commuting using portable sensors: Effects of transport modes in a French metropolis study case. J. Environ. Manag. 2024, 365, 121400. [Google Scholar] [CrossRef]
- Miskell, G.; Alberti, K.; Feenstra, B.; Henshaw, G.S.; Papapostolou, V.; Patel, H.; Polidori, A.; Salmond, J.A.; Weissert, L.; Williams, D.E. Reliable data from low cost ozone sensors in a hierarchical network. Atmos. Environ. 2019, 214, 116870. [Google Scholar] [CrossRef]
- De Vito, S.; Elia, G.D.; Ferlito, S.; Esposito, E.; Piantadosi, G.; Di Francia, G. Remote Calibration strategies for Low Cost Air Quality Multisensors: A performance comparison. In Proceedings of the 2024 IEEE International Symposium on Olfaction and Electronic Nose (ISOEN), Grapevine, TX, USA, 12–15 May 2024; pp. 1–4. [Google Scholar]
- Fattoruso, G.; Nocerino, M.; Toscano, D.; Pariota, L.; Sorrentino, G.; Manna, V.; De Vito, S.; Cartenì, A.; Fabbricino, M.; Di Francia, G. Site Suitability Analysis for Low Cost Sensor Networks for Urban Spatially Dense Air Pollution Monitoring. Atmosphere 2020, 11, 1215. [Google Scholar] [CrossRef]
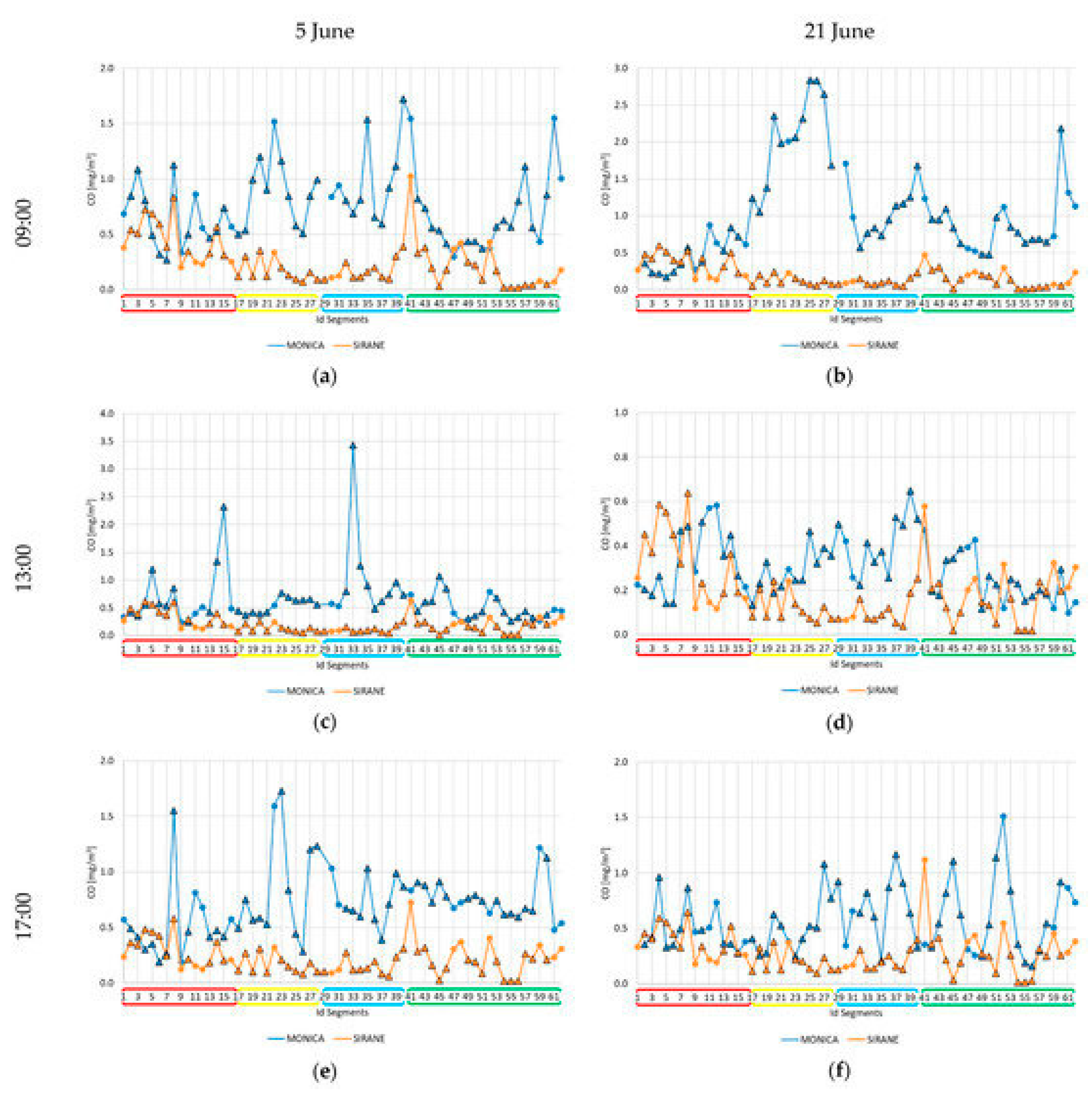
- Soulhac, L.; Salizzoni, P.; Cierco, F.-X.; Perkins, R. The model SIRANE for atmospheric urban pollutant dispersion; PART I, presentation of the model. Atmos. Environ. 2011, 45, 7379–7395. [Google Scholar] [CrossRef]
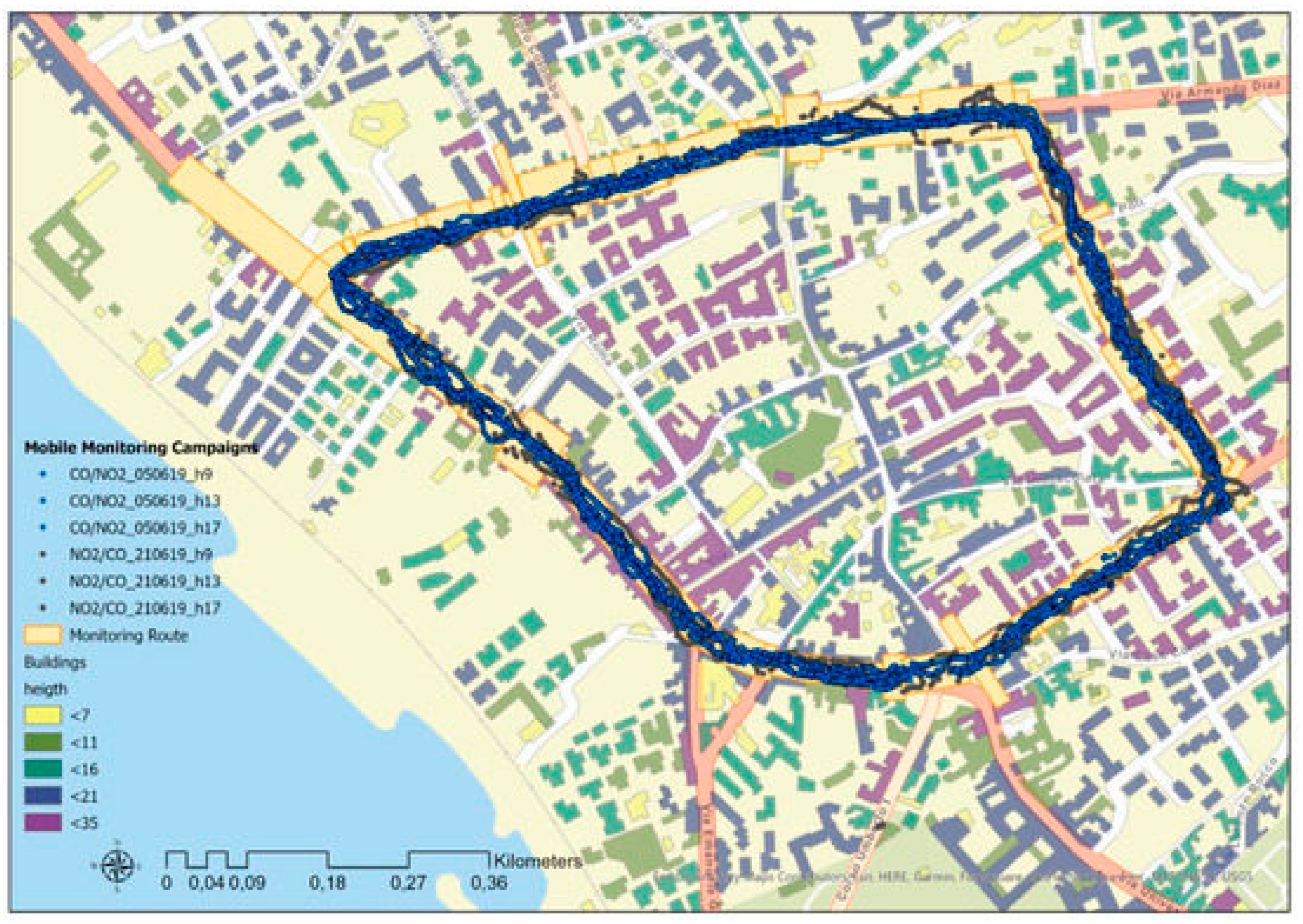
- Fattoruso, G.; Toscano, D.; Cornelio, A.; De Vito, S.; Murena, F.; Fabbricino, M.; Di Francia, G. Using Mobile Monitoring and Atmospheric Dispersion Modeling for Capturing High Spatial Air Pollutant Variability in Cities. Atmosphere 2022, 13, 1933. [Google Scholar] [CrossRef]
- Gillespie, J.; Masey, N.; Heal, M.R.; Hamilton, S.; Beverland, I.J. Estimation of spatial patterns of urban air pollution over a 4-week period from repeated 5-min measurements. Atmos. Environ. 2017, 150, 295–302. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Technology | Type | Units |
|---|---|---|---|
| NOX | Chemiluminescence | Thermo Scientific Mod. 42i | µg/m3 |
| CO | Non-dispersive infrared spectroscopy | Teledyne API Mod. T300 | mg/m3 |
| O3 | Ultraviolet photometry | Teledyne API Mod. T400 | µg/m3 |
| PM10/PM2.5 | Beta-ray attenuation | FAI Mod. SWAM 5a Dual Channel Monitor | µg/m3 |
| Period 1 (2021) | Period 2 (2021) | Period 3 (2022) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| # | Batch 1 | Batch 2 | Batch 3 | Batch 1 | Batch 2 | Batch 3 | Batch 1 | Batch 2 | Batch 3 |
| 13 January 15:00 -> 5 February 12:00 | 5 February 12:00 -> 2 March 10:00 | 2 March 14:00 -> 24 March 10:00 | 4 July 00:00 -> 19 July 23:59 | 24 August 11:00 -> 14 September 8:40 | 14 September 10:15 -> 4 October 9:20 | 11 January 00:00 -> 2 February 23:59 | 9 February 00:00 -> 3 March 23:59 | 4 March 00:00 -> 13 April 23:59 | |
| 1 | 337 | 325 | 324 | 332 | 327 | 324 | 324 | 327 | 325 |
| 2 | 339 | 326 | 330 | 340 | 330 | 325 | 326 | 328 | 356 |
| 3 | 344 | 327 | 334 | 349 | 331 | 326 | 329 | 349 | 353 |
| 4 | 345 | 329 | 335 | 350 | 333 | 329 | 334 | 355 | 350 |
| 5 | 349 | 331 | 343 | 353 | 334 | 343 | 339 | 347 | 335 |
| 6 | 353 | 332 | 350 | 356 | 335 | _ | 338 | 345 | 330 |
| 7 | 355 | 333 | 351 | 360 | 337 | _ | 344 | 331 | 332 |
| 8 | 356 | 340 | 352 | 362 | 339 | _ | 361 | 333 | 341 |
| 9 | 360 | 341 | 362 | _ | 341 | _ | _ | 337 | 351 |
| 10 | 361 | 364 | 363 | _ | 344 | _ | _ | 343 | _ |
| 11 | _ | _ | _ | _ | 345 | _ | _ | _ | _ |
| 12 | _ | _ | _ | _ | 351 | _ | _ | _ | _ |
| 13 | _ | _ | _ | _ | 355 | _ | _ | _ | _ |
| 14 | _ | _ | _ | _ | 363 | _ | _ | _ | _ |
| Train | Test | MAE | R2 | RMSE | NRMSE | MAPE | ||
|---|---|---|---|---|---|---|---|---|
| #Hrs | #Hrs | µg/m3 | N/A | µg/m3 | µg/m3 | N/A | ||
| O3 | AVG | 322.7 | 207.3 | 7.46 | 0.86 | 9.59 | 0.35 | 0.08 |
| STD | 25.6 | 35.3 | 1.92 | 0.10 | 3.00 | 0.12 | 0.02 | |
| MDN | 330 | 203.5 | 6.99 | 0.88 | 9.32 | 0.33 | 0.08 | |
| NO2 | AVG | 322.7 | 207.3 | 7.92 | 0.83 | 10.32 | 0.41 | 0.08 |
| STD | 25.62 | 35.4 | 2.41 | 0.08 | 3.10 | 0.09 | 0.02 | |
| MDN | 330 | 203.5 | 6.95 | 0.86 | 9.07 | 0.38 | 0.07 | |
| CO | AVG | 322.7 | 207.3 | 190 | 0.33 | 260 | 0.74 | 0.12 |
| STD | 25.62 | 35.4 | 80 | 1.02 | 0.12 | 0.34 | 0.04 | |
| MDN | 330 | 203.5 | 190 | 0.51 | 240 | 0.69 | 0.11 | |
| PM2.5 | AVG | 323.5 | 195.5 | 5.49 | 0.75 | 7.43 | 0.49 | 0.07 |
| STD | 25.8 | 35.1 | 1.12 | 0.11 | 1.38 | 0.11 | 0.02 | |
| MDN | 323.5 | 195.5 | 5.13 | 0.75 | 7.32 | 0.50 | 0.08 | |
| PM10 | AVG | 321.9 | 206.7 | 13.07 | 0.42 | 20.84 | 0.75 | 0.10 |
| STD | 25.4 | 34.8 | 4.83 | 0.19 | 12.94 | 0.12 | 0.03 | |
| MDN | 329.5 | 202.5 | 11.86 | 0.43 | 14.10 | 0.76 | 0.10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Vito, S.; Del Giudice, A.; D’Elia, G.; Esposito, E.; Fattoruso, G.; Ferlito, S.; Formisano, F.; Loffredo, G.; Massera, E.; D’Auria, P.; et al. Future Low-Cost Urban Air Quality Monitoring Networks: Insights from the EU’s AirHeritage Project. Atmosphere 2024, 15, 1351. https://doi.org/10.3390/atmos15111351
De Vito S, Del Giudice A, D’Elia G, Esposito E, Fattoruso G, Ferlito S, Formisano F, Loffredo G, Massera E, D’Auria P, et al. Future Low-Cost Urban Air Quality Monitoring Networks: Insights from the EU’s AirHeritage Project. Atmosphere. 2024; 15(11):1351. https://doi.org/10.3390/atmos15111351
Chicago/Turabian StyleDe Vito, Saverio, Antonio Del Giudice, Gerardo D’Elia, Elena Esposito, Grazia Fattoruso, Sergio Ferlito, Fabrizio Formisano, Giuseppe Loffredo, Ettore Massera, Paolo D’Auria, and et al. 2024. "Future Low-Cost Urban Air Quality Monitoring Networks: Insights from the EU’s AirHeritage Project" Atmosphere 15, no. 11: 1351. https://doi.org/10.3390/atmos15111351
APA StyleDe Vito, S., Del Giudice, A., D’Elia, G., Esposito, E., Fattoruso, G., Ferlito, S., Formisano, F., Loffredo, G., Massera, E., D’Auria, P., & Di Francia, G. (2024). Future Low-Cost Urban Air Quality Monitoring Networks: Insights from the EU’s AirHeritage Project. Atmosphere, 15(11), 1351. https://doi.org/10.3390/atmos15111351