
The Significance of Internal Variability for Numerical Experimentation and Analysis



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- Firstly, noise is expected to arise in systems influenced by short-term weather variations, which lack strong damping but possess robust memory. Such systems are foremost all atmospheric and oceanic hydrodynamical systems with short-term variations related to eddies, internal tides, fronts, and other phenomena. A very different case of such systems encompasses regional morphodynamics, as highlighted by a CNN report (see “Damaged US Navy sub was operating in one of the world’s most difficult undersea environments, analysts say”, CNN, 8 October 2021) following a US submarine incident in the South China Sea, which emphasised the ongoing, albeit gradual, changes in the environment and seafloor. This underscores the necessity for continuous bottom contour mapping in the region. Additionally, ecosystem dynamics may also be affected by such noise [30,31,32].
- Another aspect pertains to the realm of numerical experimentation, where alterations in factors such as parametrisations, boundary conditions, and atmospheric composition are introduced in simulations. In such experiments, appropriately designed ensembles are crucial for estimating the extent of inherent variability, determining whether changes between ensembles can be attributed solely to internal variability or if external factors play a role (an issue akin to detection) (e.g., [33]).
- The third one is the conventional “detection and attribution” challenge [34]: whether observed variations may be understood in the framework of internal variability or if an external factor needs to be determined to explain the observed change, which brings us back to the initial observations of the need to separate forced and unforced climate variations, which was mentioned at the beginning of this paper.
2. Methods
3. Results
3.1. Emerging Noise in Marginal Seas
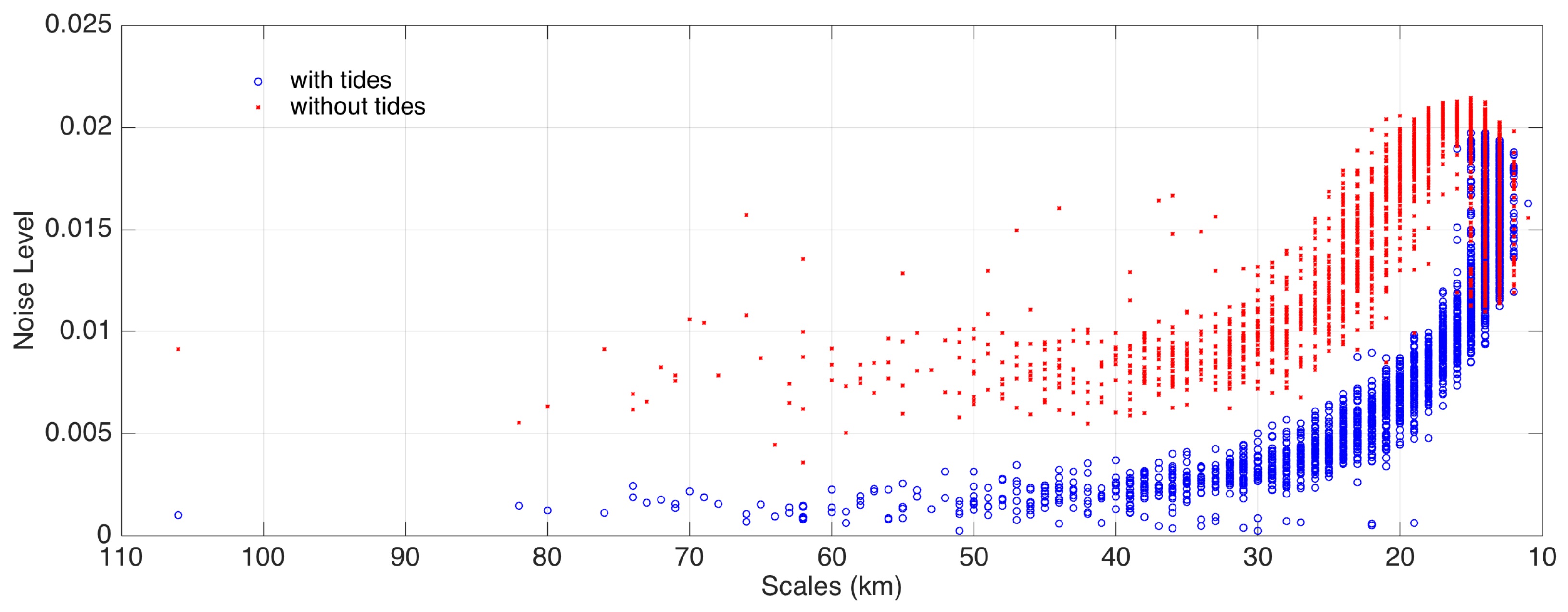
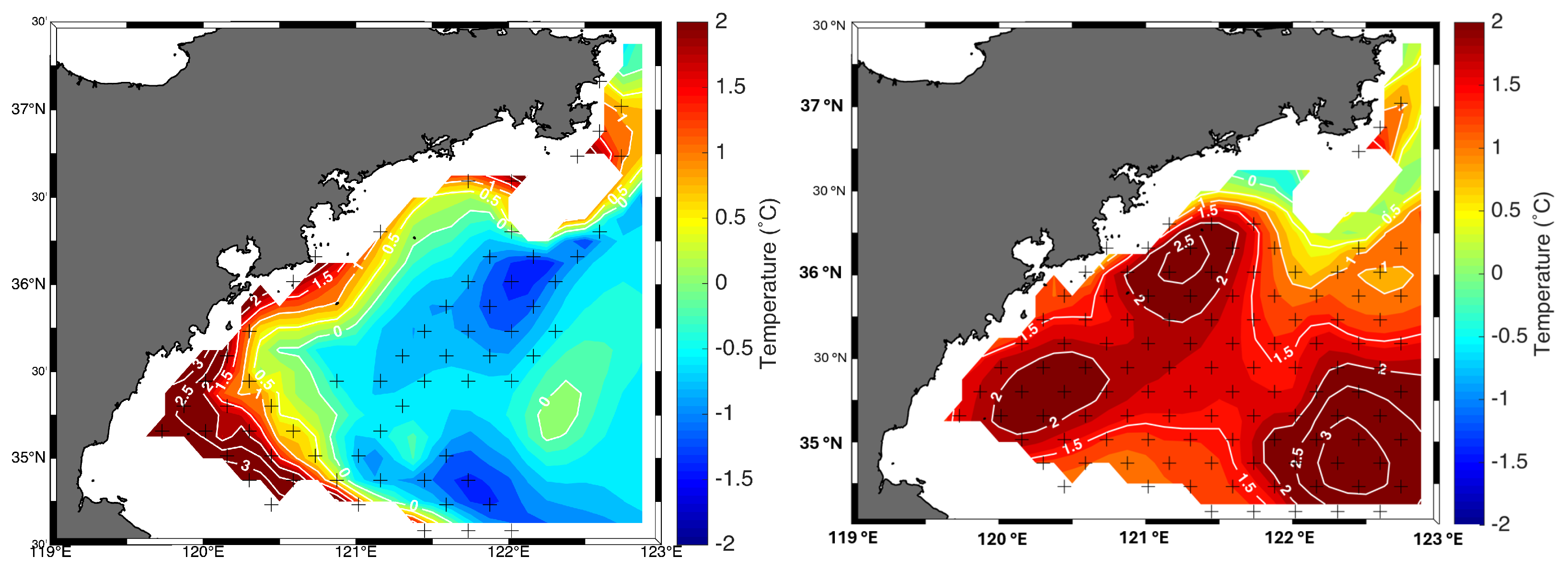
3.2. Sensitivity to Tides and Changing Seasonal Conditions
3.3. Seeding Noise
4. Discussion
4.1. First Experiments of the Effect of Disturbances on Morphodynamics
4.2. Assessing the Outcome of Numerical Experiments
4.3. Detection and Attribution
4.4. Multiple Equilibria
5. Conclusions
- Low-frequency noise can be understood within the framework of Hasselmann’s stochastic climate model [1].
- Internal variability, which refers to variations that cannot be attributed to specific external drivers, is an intrinsic part of the system’s dynamics rather than just a nuisance.
- In the absence of external drivers, the system exhibits variability across all spatial and temporal scales.
- In simulations, identifying this noise is relatively straightforward. It can be achieved by constructing ensembles of simulations with minor, insignificant variations introduced by shifting the initial time or using different computer platforms.
- To determine the impact of external factors, statistical testing is required, using “no effect” as the null hypothesis. This can be carried out through numerical experiments with ensembles of simulations. Attributing causal mechanisms, especially when multiple causes are possible, can be approached with a plausibility argument.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hasselmann, K. Stochastic climate models. Part I. Theory. Tellus 1976, 28, 473–485. [Google Scholar]
- von Storch, H.; von Storch, J.S.; Müller, P. Noise in the Climate System—Ubiquitous, Constitutive and Concealing. In Mathematics Unlimited-2001 and Beyond. Part II; Engquist, B., Schmid, W., Eds.; Springer: Berlin/Heidelberg, Germany, 2001; pp. 1179–1194. [Google Scholar]
- Chervin, R.; Gates, W.; Schneider, S. The effect of the time averaging on the noise level of climatological statistics generated by atmospheric general circulation models. J. Atmos. Sci. 1974, 31, 2216–2219. [Google Scholar] [CrossRef]
- Chervin, R.M.; Schneider, S.H. On Determining the Statistical Significance of Climate Experiments with General Circulation Models. J. Atmos. Sci. 1976, 33, 405–412. [Google Scholar] [CrossRef]
- Fischer, G.; Kirk, E.; Podzun, R. Physikalische Diagnose eines numerischen Experiments zur Entwicklung der grossräumigen atmosphärischen Zirkulation auf einem Aquaplaneten. Meteor. Rdsch 1991, 43, 33–42. [Google Scholar]
- Ji, Y.; Vernekar, A.D. Simulation of the Asian summer monsoons of 1987 and 1988 with a regional model nested in a global GCM. J. Clim. 1997, 10, 1965–1979. [Google Scholar] [CrossRef]
- Rinke, A.; Dethloff, K. On the sensitivity of a regional arctic climate model to initial and boundary conditions. Clim. Res. 2000, 14, 101–113. [Google Scholar] [CrossRef]
- Feser, F.; von Storch, H. A Dynamical Downscaling Case Study for Typhoons in Southeast Asia Using a Regional Climate Model. Mon. Weather. Rev. 2008, 136, 1806–1815. [Google Scholar] [CrossRef]
- Schaaf, B.; von Storch, H.; Feser, F. Does Spectral Nudging Have an Effect on Dynamical Downscaling Applied in Small Regional Model Domains? Mon. Weather. Rev. 2017, 145, 4303–4311. [Google Scholar] [CrossRef]
- Rockel, B.; Castro, C.L.; Pielke, R.A., Sr.; von Storch, H.; Leoncini, G. Dynamical downscaling: Assessment of model system dependent retained and added variability for two different regional climate models. J. Geophys. Res. Atmos. 2008, 113, D21. [Google Scholar] [CrossRef]
- Jochum, M.; Murtugudde, R. Internal variability of the tropical Pacific ocean. Geophys. Res. Lett. 2004, 31, 14. [Google Scholar] [CrossRef]
- Jochum, M.; Murtugudde, R. Internal Variability of Indian Ocean SST. J. Clim. 2005, 18, 3726–3738. [Google Scholar] [CrossRef]
- Arbic, B.K.; Müller, M.; Richman, J.G.; Shriver, J.F.; Morten, A.J.; Scott, R.B.; Sérazin, G.; Penduff, T. Geostrophic Turbulence in the Frequency–Wavenumber Domain: Eddy-Driven Low-Frequency Variability. J. Phys. Oceanogr. 2014, 44, 2050–2069. [Google Scholar] [CrossRef]
- Sérazin, G.; Penduff, T.; Grégorio, S.; Barnier, B.; Molines, J.M.; Terray, L. Intrinsic Variability of Sea Level from Global Ocean Simulations: Spatiotemporal Scales. J. Clim. 2015, 28, 4279–4292. [Google Scholar] [CrossRef]
- Penduff, T.; Close, S.; Molines, J.M.; Barnier, B.; Bessières, L.; Maze, G. Chaotic Variability of Ocean Heat Content: Climate-Relevant Features and Observational Implications. Oceanography 2018, 31, 63–71. [Google Scholar] [CrossRef]
- Kahru, M.; Elmgren, R. Multidecadal time series of satellite-detected accumulations of cyanobacteria in the Baltic Sea. Biogeosciences 2014, 11, 3619–3633. [Google Scholar] [CrossRef]
- Büchmann, B.; Söderkvist, J. Internal variability of a 3-D ocean model. Tellus A Dyn. Meteorol. Oceanogr. 2016, 68, 30417. [Google Scholar] [CrossRef]
- Waldman, R.; Somot, S.; Herrmann, M.; Sevault, F.; Isachsen, P.E. On the Chaotic Variability of Deep Convection in the Mediterranean Sea. Geophys. Res. Lett. 2018, 45, 2433–2443. [Google Scholar] [CrossRef]
- Tang, S.; von Storch, H.; Chen, X.; Zhang, M. “Noise” in climatologically driven ocean models with different grid resolution. Oceanologia 2019, 61, 300–307. [Google Scholar] [CrossRef]
- Tang, S.; von Storch, H.; Chen, X. Atmospherically forced regional ocean simulations of the South China Sea: Scale-dependency of the signal-to-noise ratio. J. Phys. Oceano. 2020, 50, 133–144. [Google Scholar] [CrossRef]
- Lin, L.; von Storch, H.; Guo, D.; Tang, S.; Zheng, P.; Chen, X. The effect of tides on internal variability in the Bohai and Yellow Sea. Dyn. Atmos. Ocean. 2022, 98, 101301. [Google Scholar] [CrossRef]
- Lin, L.; von Storch, H.; Chen, X. The Stochastic Climate Model helps reveal the role of memory in internal variability in the Bohai and Yellow Sea. Commun. Earth Environ. 2023, 4, 347. [Google Scholar] [CrossRef]
- Benincasa, R.; Liguori, G.; Pinardi, N.; von Storch, H. Internal and forced ocean variability in the Mediterranean Sea. Ocean. Sci. 2024, 20, 1003–1012. [Google Scholar] [CrossRef]
- Lin, L.; von Storch, H.; Chen, X.; Jiang, W.; Tang, S. Link between the internal variability and the baroclinic instability in the Bohai and Yellow Sea. Ocean. Dyn. 2023, 73, 793–806. [Google Scholar] [CrossRef]
- Waldman, R.; Somot, S.; Herrmann, M.; Bosse, A.; Caniaux, G.; Estournel, C.; Houpert, L.; Prieur, L.; Sevault, F.; Testor, P. Modeling the intense 2012–2013 dense water formation event in the northwestern Mediterranean Sea: Evaluation with an ensemble simulation approach. J. Geophys. Res. Ocean. 2017, 122, 1297–1324. [Google Scholar] [CrossRef]
- Callies, U.; von Storch, H. Extreme separations of bottle posts in the southern Baltic Sea—Tentative interpretation of an experiment-of-opportunity. Oceanologia 2022, 65, 410–422. [Google Scholar] [CrossRef]
- Brückner, E. Klimaschwankungen Seit 1700 Nebst Bemerkungen über die Klimaschwankungen der Diluvialzeit; Geographische Abhandlungen; E.D. Hölzel: Wien, Austria; Olmütz, Czech Republic, 1890. [Google Scholar]
- Mitchell, J.M. An overview of climatic variability and its causal mechanisms. Quat. Res. 1976, 6, 481–493. [Google Scholar] [CrossRef]
- Friedman, R.M. Appropriating the Weather; Cornell University Press: Ithaca, NY, USA, 1989. [Google Scholar]
- Gehlen, M.; Berthet, S.; Séférian, R.; Ethé, C.; Penduff, T. Quantification of Chaotic Intrinsic Variability of Sea-Air CO2 Fluxes at Interannual Timescales. Geophys. Res. Lett. 2020, 47, e2020GL088304. [Google Scholar] [CrossRef]
- Mayersohn, B.; Smith, K.S.; Mangolte, I.; Lévy, M. Intrinsic timescales of variability in a marine plankton model. Ecol. Model. 2021, 443, 109446. [Google Scholar] [CrossRef]
- Mayersohn, B.; Lévy, M.; Mangolte, I.; Smith, K.S. Emergence of Broadband Variability in a Marine Plankton Model Under External Forcing. J. Geophys. Res. Biogeosci. 2022, 127, e2022JG007011. [Google Scholar] [CrossRef]
- Lin, L.; von Storch, H.; Ding, Y. The anti-cyclonic gyre around the Qingdao cold water mass in the China marginal sea. EGUsphere 2024, 2024, 1–26. [Google Scholar] [CrossRef]
- Hasselmann, K. Optimal Fingerprints for the Detection of Time-dependent Climate Change. J. Clim. 1993, 6, 1957–1971. [Google Scholar] [CrossRef]
- Lemke, P. Stochastic climate models, part 3. Application to zonally averaged energy models. Tellus 1977, 29, 385–392. [Google Scholar] [CrossRef]
- Frankignoul, C.; Hasselmann, K. Stochastic climate models, Part II Application to sea-surface temperature anomalies and thermocline variability. Tellus 1977, 29, 289–305. [Google Scholar] [CrossRef]
- Lemke, P.; Trinkl, E.W.; Hasselmann, K. Stochastic Dynamic Analysis of Polar Sea Ice Variability. J. Phys. Oceanogr. 1980, 10, 2100–2120. [Google Scholar] [CrossRef]
- von Storch, H.; Zwiers, F.W. Statistical Analysis in Climate Research; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar]
- von Storch, H.; Li, D. Statistics and Modelling of Regional Climate Variability in China; World Scientific (Europe): London, UK, 2024. [Google Scholar] [CrossRef]
- Zhang, M.; von Storch, H.; Chen, X.; Wang, D.; Li, D. Temporal and spatial statistics of travelling eddy variability in the South China Sea. Ocean. Dyn. 2019, 69, 879–898. [Google Scholar] [CrossRef]
- Lin, L.; von Storch, H.; Chen, X. Seeding Noise in Ensembles of Marginal Sea Simulations—The Case of Bohai and Yellow Sea. Adv. Comput. Commun. 2023, 4, 70–73. [Google Scholar] [CrossRef]
- Hasselmann, K. PIPs and POPs: The reduction of complex dynamical systems using principal interaction and oscillation patterns. J. Geophys. Res. Atmos. 1988, 93, 11015–11021. [Google Scholar] [CrossRef]
- Geyer, B.; Ludwig, T.; von Storch, H. Reproducibility and regional climate models—seeding noise by changing computers and initial conditions. Commun. Earth Environ. 2021, 2, 17. [Google Scholar] [CrossRef]
- Lin, L.; Zhang, W.; Arlinghaus, P.; von Storch, H. Internal variability in an idealized morphodynamic model. 2024; in preparation. [Google Scholar]
- von Storch, H.; Güss, S.; Heimann, M. Das Klimasystem und Seine Modellierung. Eine Einführung; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 1999; p. 255. [Google Scholar]
- Hasselmann, K. On the signal-to-noise problem in atmospheric response studies. In Meteorology over the Tropical Oceans; Shaw, B.D., Ed.; Royal Meteorological Society: Berkshire, UK, 1979; pp. 251–259. [Google Scholar]
- Hannoschöck, G.; Frankignoul, C. Multivariate Statistical Analysis of a Sea Surface Temperature Anomaly Experiment with the GISS General Circulation Model I. J. Atmos. Sci. 1985, 42, 1430–1450. [Google Scholar] [CrossRef]
- Barnett, T.; Zwiers, F.; Hengerl, G.; Allen, M.; Crowly, T.; Gillett, N.; Hasselmann, K.; Jones, P.; Santer, B.; Schnur, R.; et al. Detecting and Attributing External Influences on the Climate System: A Review of Recent Advances. J. Clim. 2005, 18, 1291–1314. [Google Scholar] [CrossRef]
- Budyko, M.I. The effect of solar radiation variations on the climate of the Earth. Tellus 1969, 21, 611–619. [Google Scholar] [CrossRef]
- Sellers, W.D. A global climatic model based on the energy balance of the earth-atmosphere system. J. Appl. Meteorol. Climatol. 1969, 8, 392–400. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
von Storch, H.; Lin, L. The Significance of Internal Variability for Numerical Experimentation and Analysis. Atmosphere 2024, 15, 1317. https://doi.org/10.3390/atmos15111317
von Storch H, Lin L. The Significance of Internal Variability for Numerical Experimentation and Analysis. Atmosphere. 2024; 15(11):1317. https://doi.org/10.3390/atmos15111317
Chicago/Turabian Stylevon Storch, Hans, and Lin Lin. 2024. "The Significance of Internal Variability for Numerical Experimentation and Analysis" Atmosphere 15, no. 11: 1317. https://doi.org/10.3390/atmos15111317
APA Stylevon Storch, H., & Lin, L. (2024). The Significance of Internal Variability for Numerical Experimentation and Analysis. Atmosphere, 15(11), 1317. https://doi.org/10.3390/atmos15111317