
Application of Machine Learning Techniques to Improve Multi-Radar Mosaic Precipitation Estimates in Shanghai

 , ,
, ,
Abstract
:1. Introduction
2. Study Data and Experiments Design
2.1. Study Area and Data
2.2. Experiments Design
3. Analysis Methods
3.1. The LightGBM Methods
3.2. The Traditional Z–R Relationship Method
3.3. Evaluation Methods
4. Estimation Results and Evaluation
4.1. Explain Ability Analysis
4.2. Performance of the Estimation Results
4.2.1. Statistical Analysis
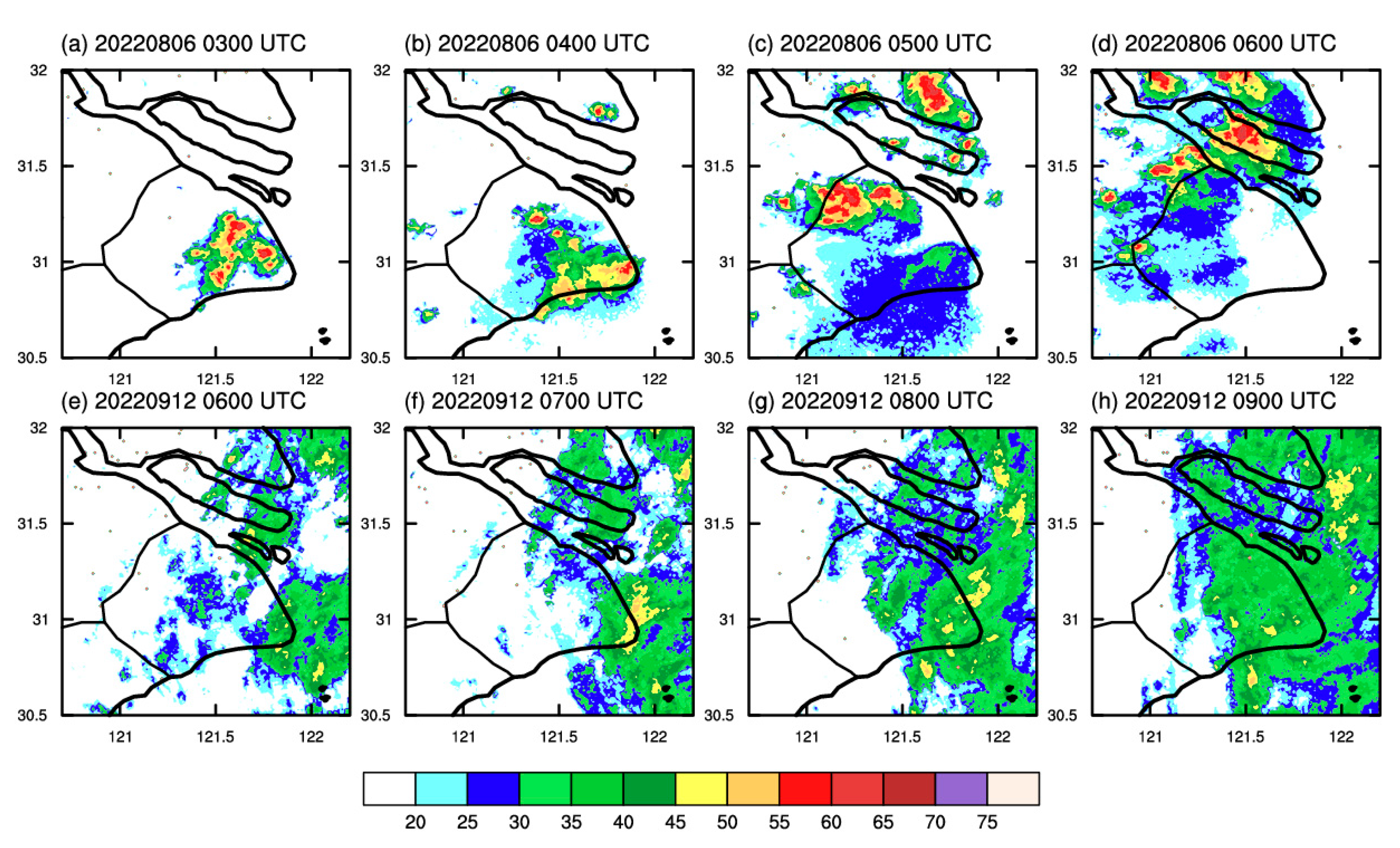
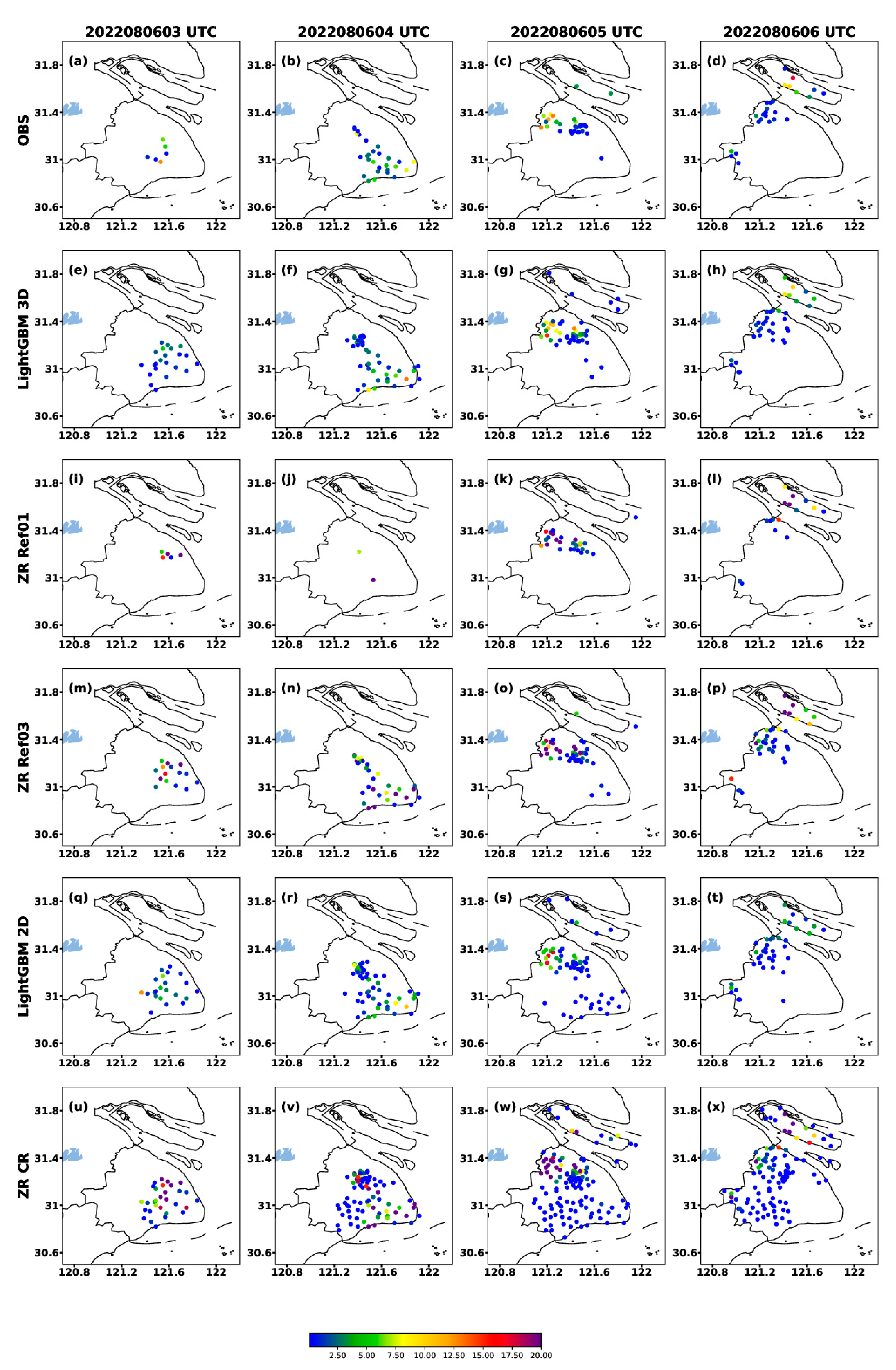
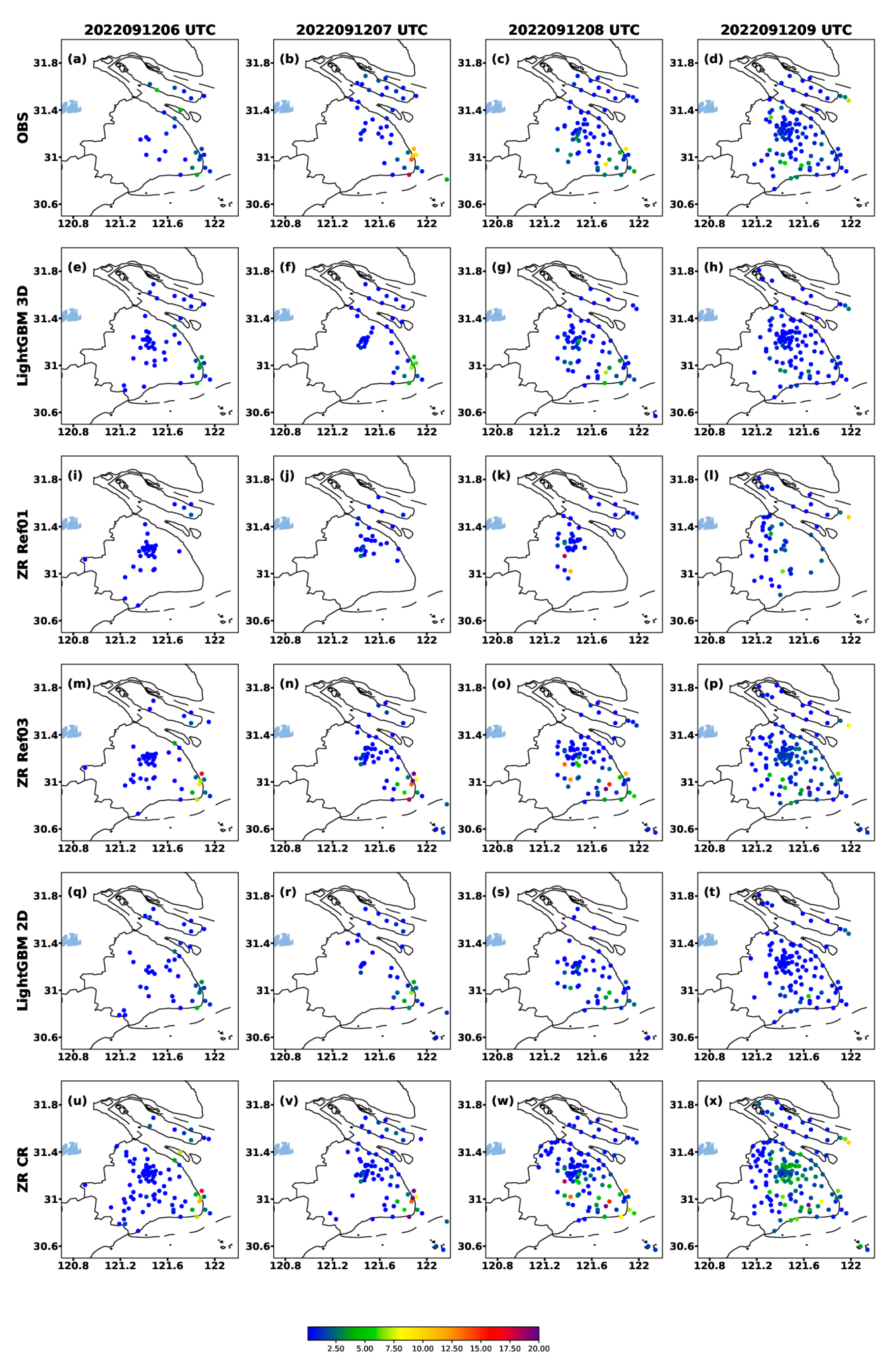
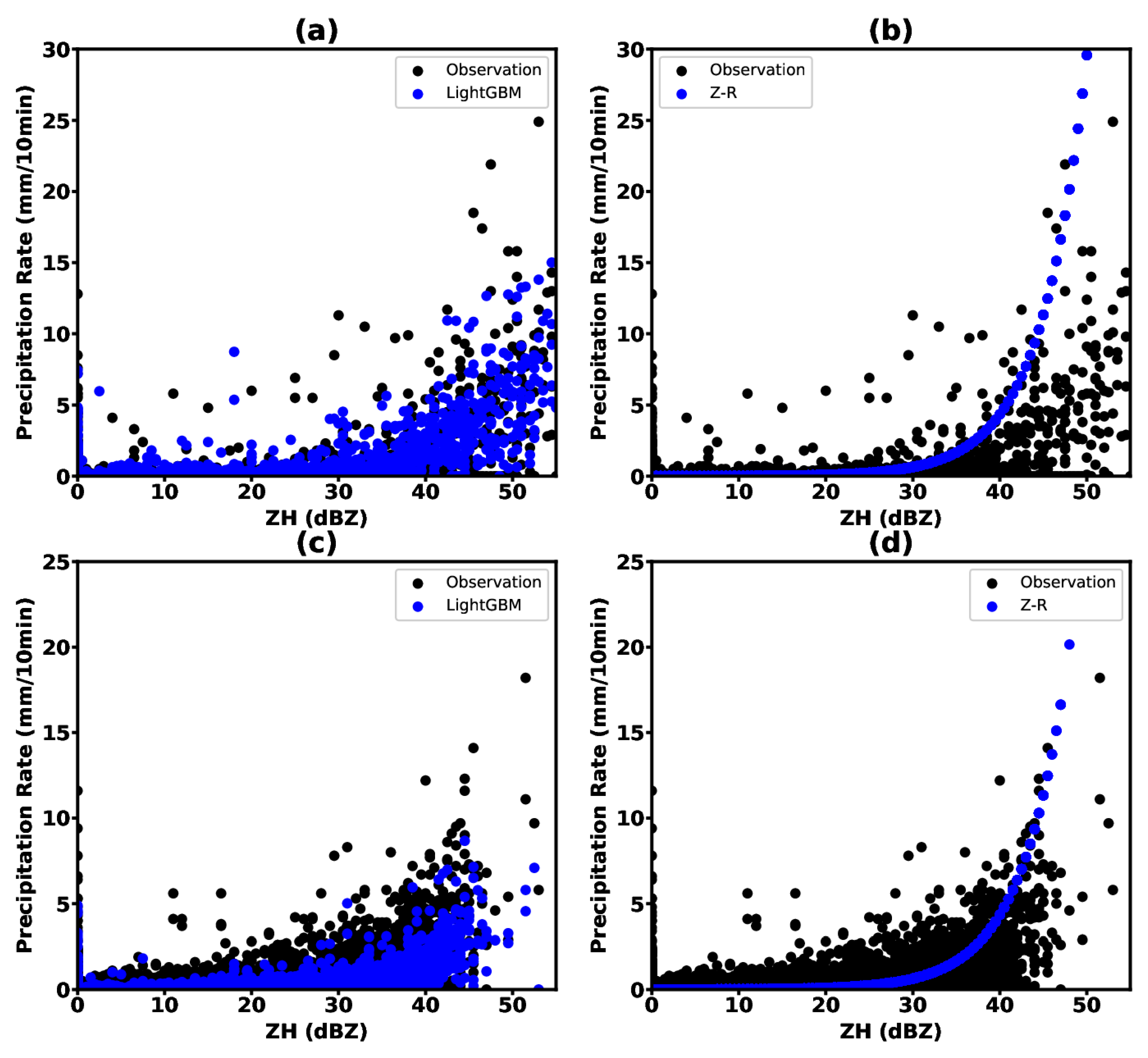
4.2.2. Case Study
5. Conclusions and Discussion
- (1)
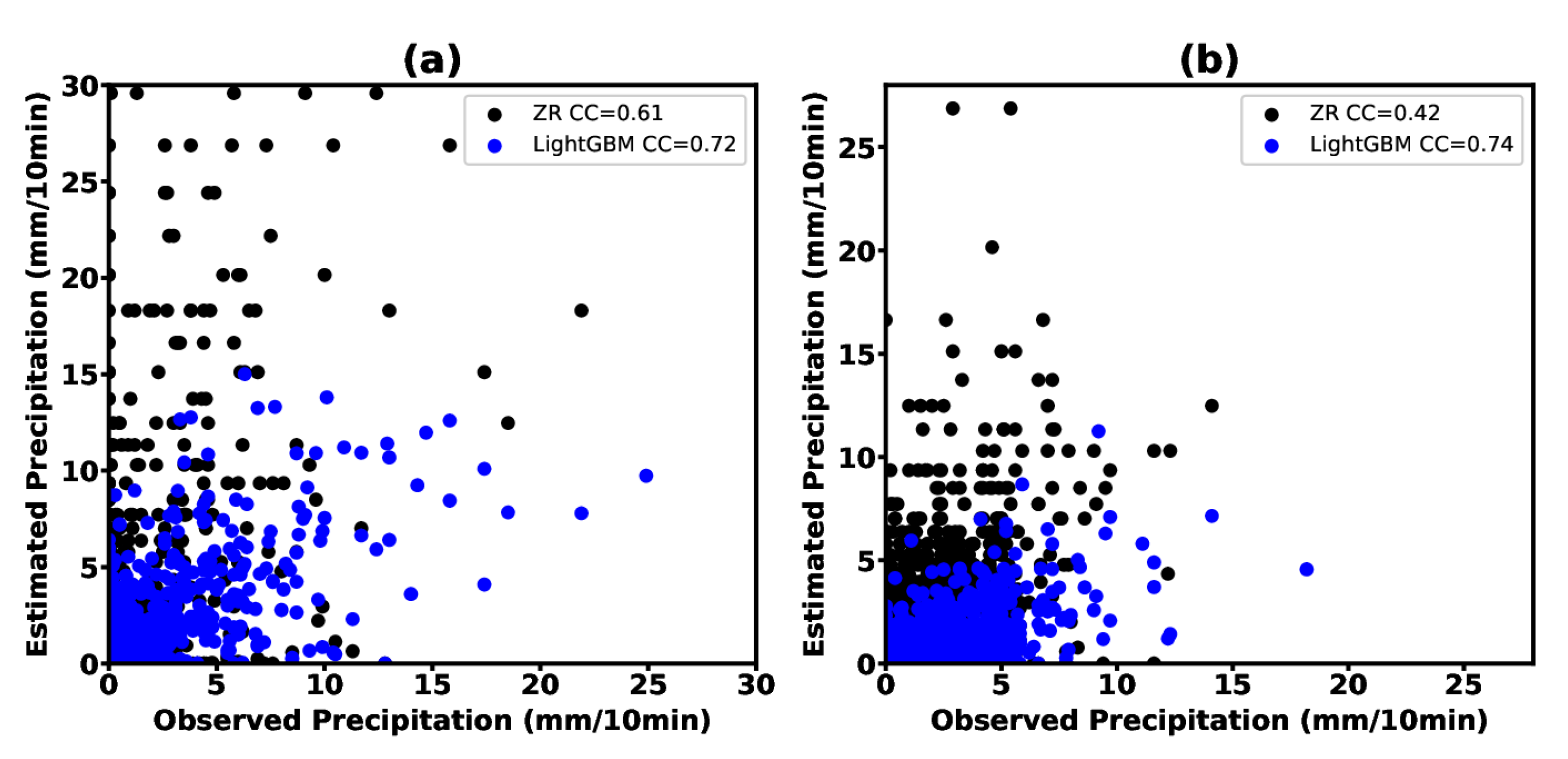
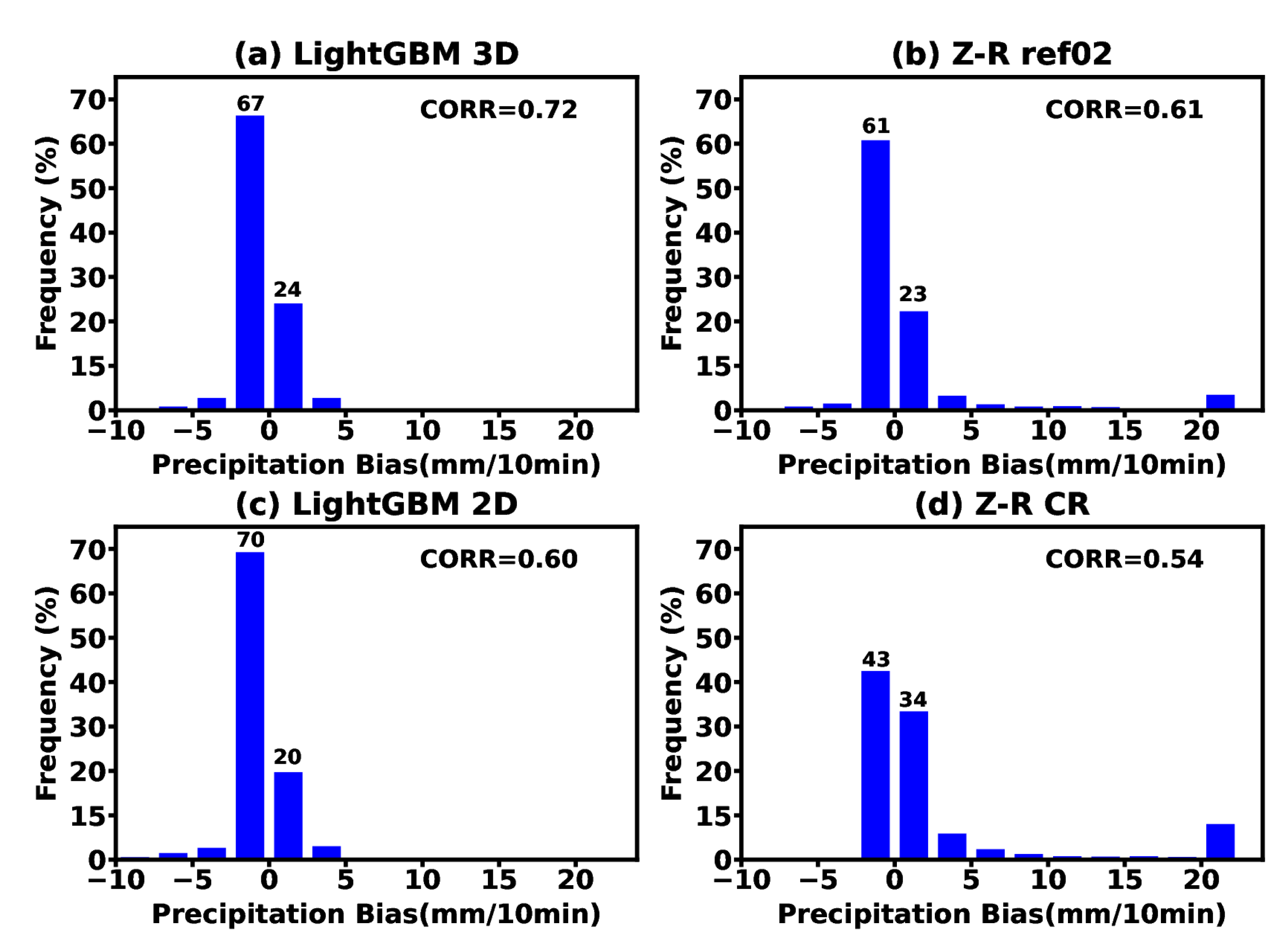
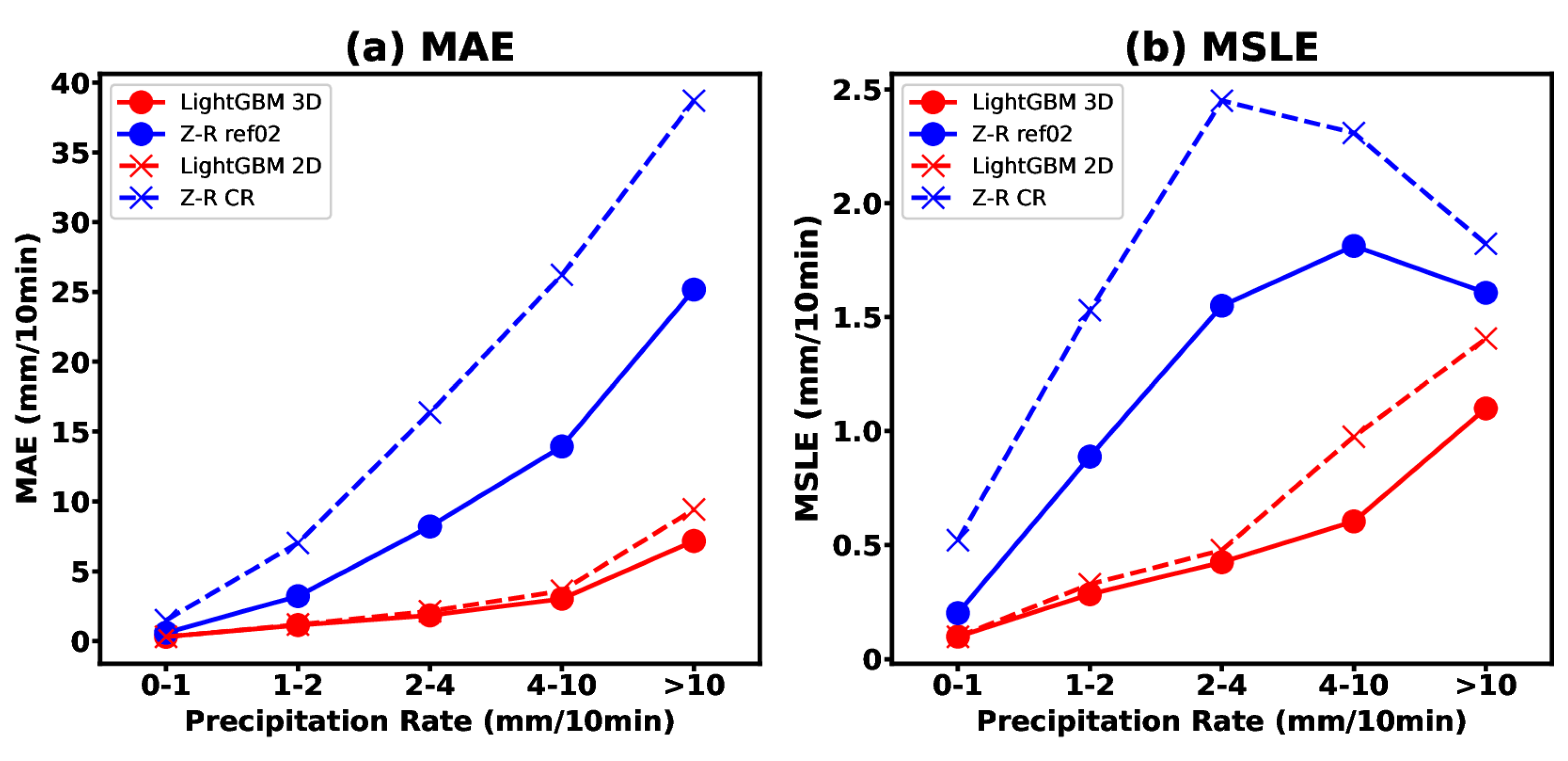
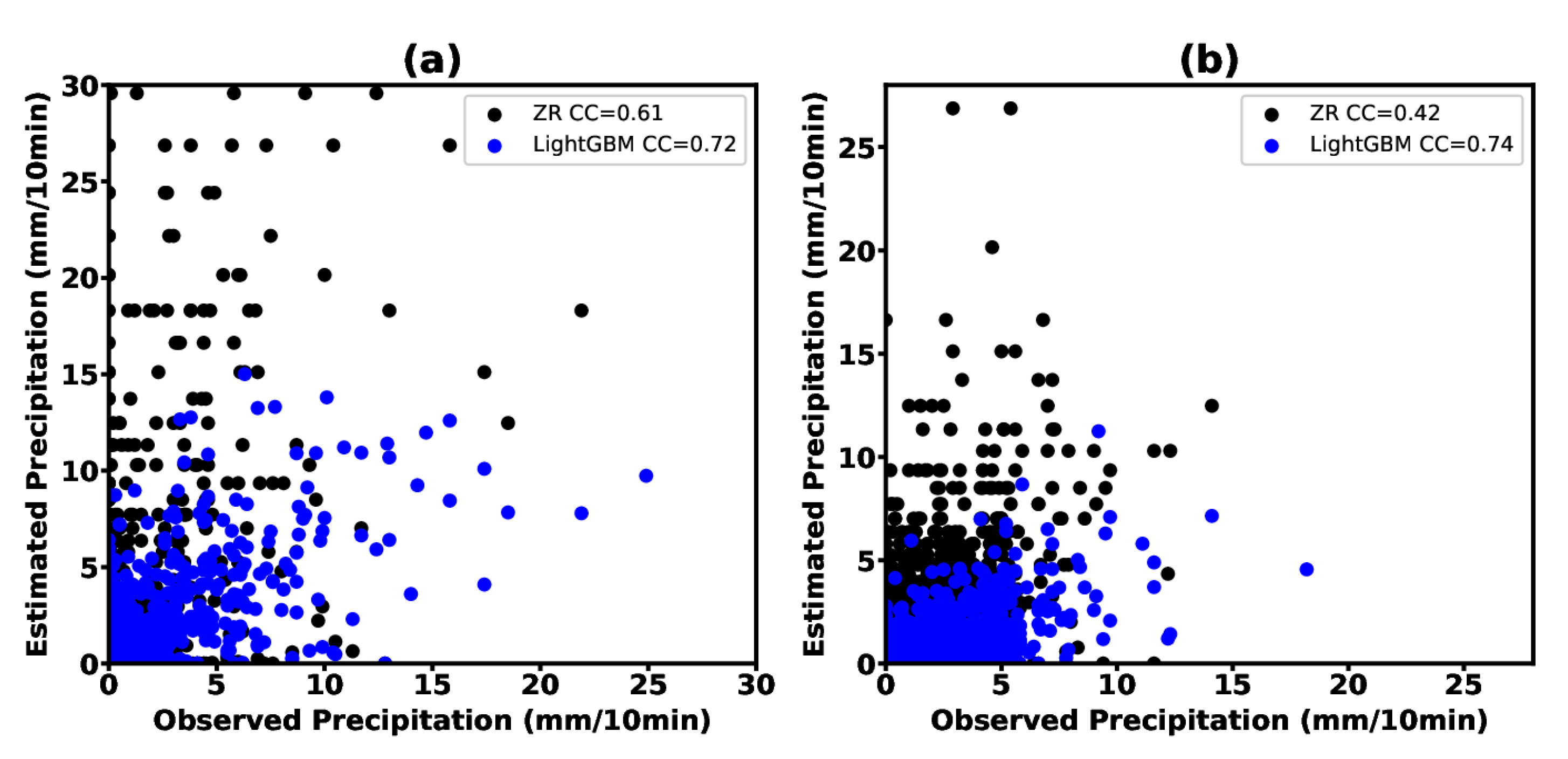
- The statistical analysis results indicate that the LightGBM 3D model with nine points shows the best ability for the QPE due to its highest correlation (CORR) and R-squared (R2) scores, as well as the lowest mean absolute error (MAE) and mean squared logarithmic error (MSLE). Conversely, the Z–R relationship method based on composite reflectivity (CR) shows the worst performance for the radar QPE in this study.
- (2)
- The spatial distribution results from the two type cases demonstrate that the LightGBM 3D model with nine points can reproduce a more realistic range and intensity of the observed rainfall, while the Z–R relationship method (especially the Z–R CR method) tends to significantly overestimate the range and intensity of heavy rainfall. However, the LightGBM models tend to underestimate extreme rainfall, which is perhaps due to the “long tail effect” caused by the limited number of extreme precipitation samples.
- (3)
- In this study, the Z–R CR method estimated a large range of false precipitation in the non-precipitation echo areas, resulting in its overestimation of the range of rainfall. Different from the Z–R CR method, neither the LightGBM 3D model nor the LightGBM 2D model can estimate a realistic precipitation range or minimally estimate the false precipitation in the non-precipitation echo areas. This suggests that the LightGBM methods may have an automatic quality control effect on the non-precipitation echoes of radar data, enhancing the model stability and reducing the impact of the radar data quality.
- (4)
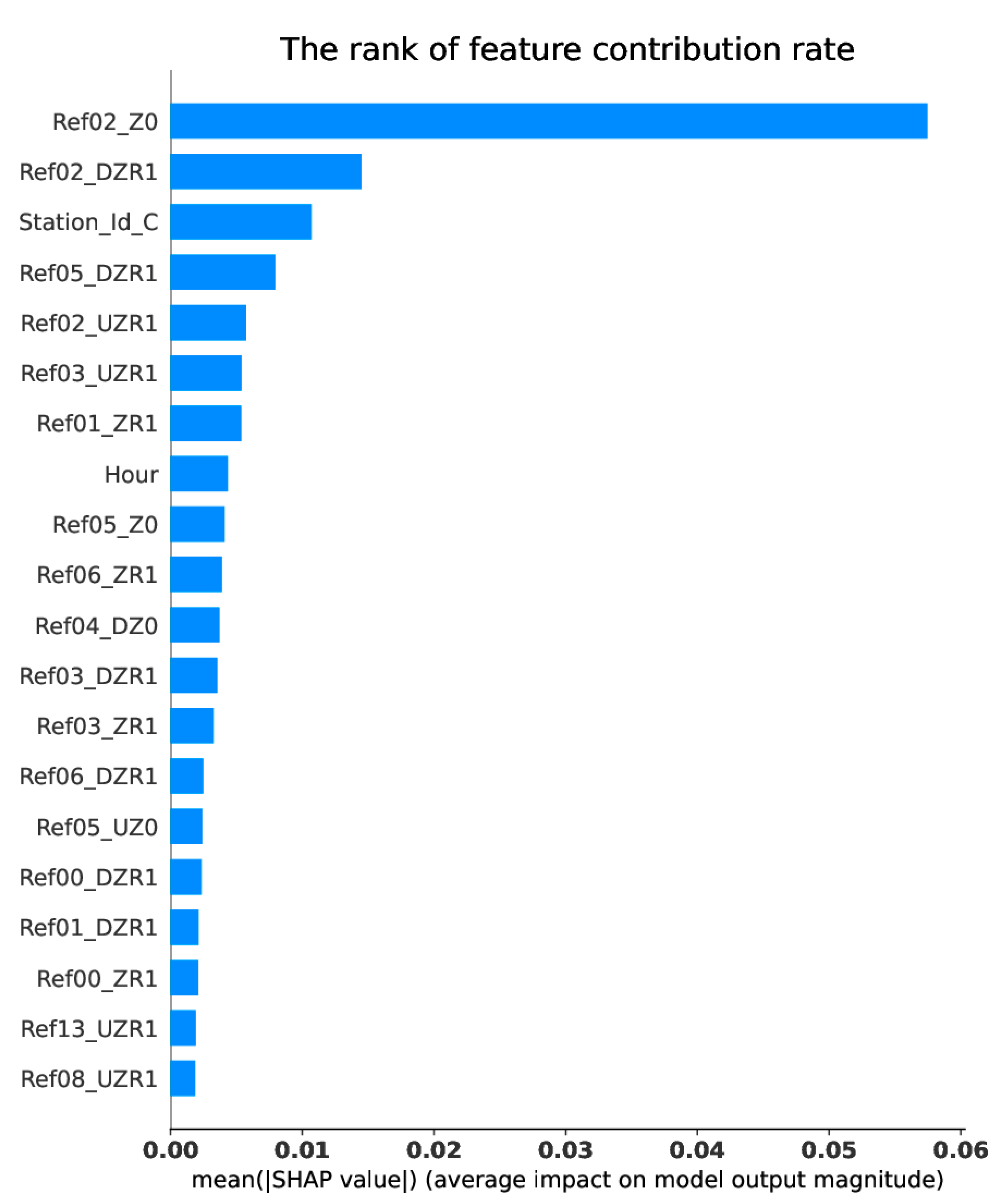
- The advantages of the LightGBM 3D model can be attributed not only to the inclusion of multi-level reflectivity in its training but also to its consideration of the geographic attributes of the rain gauge stations, diurnal variation characteristics, and the influence of mitigating spatial offset. The SHAP magnitude further highlights that the geographic attributes of the rain gauge stations (Station_Id_C) and the diurnal variation (Hour) characteristics make significant contributions to the LightGBM 3D model (Figure 2 and Figure 3).
- (5)
- The LightGBM 3D model exhibits an accurate estimation of convective precipitation; however, it tends to underestimate the intensity of precipitation caused by typhoon systems. This discrepancy may be attributed to the differing radar reflectivity characteristics between convective precipitation and typhoon-induced precipitation. Convective rainfall events typically exhibit high reflectivity values, whereas, in typhoon systems, heavy precipitation can occur without significantly strong reflectivity. Additionally, the training process includes multiple convective precipitation samples but lacks sufficient rainfall samples caused by typhoon systems, leading to a slight underestimation in typhoon-induced precipitation.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zou, H.B.; Wu, S.S.; Tian, M.X. Radar quantitative precipitation estimation based on the Gated Recurrent Unit neural network and echo-top data. Adv. Atmos. Sci. 2023, 38, 1750–1762. [Google Scholar] [CrossRef]
- Martinaitis, S.M.; Osborne, A.P.; Simpson, M.J.; Zhang, J.; Howard, K.W.; Cocks, S.B.; Kaney, B.T. A physically based multisensor quantitative precipitation estimation approach for gap-filling radar coverage. J. Hydrometeorol. 2020, 21, 1485–1511. [Google Scholar] [CrossRef]
- Zhang, J.; Tang, L.; Cocks, S.; Zhang, P.; Ryzhkov, A.; Howard, K.; Langston, C.; Kaney, B. A dual-polarization radar synthetic QPE for operations. J. Hydrometeorol. 2020, 21, 2507–2521. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, L.; Wen, H. Performance of a radar mosaic quantitative precipitation estimation algorithm based on a new data quality index for the Chinese Polarimetric Radars. Remote Sens. 2020, 12, 3557. [Google Scholar] [CrossRef]
- Jin, B.; Wu, Y.; Miao, B.; Wang, X.L.; Guo, P. Bayesian spatiotemporal modeling for blending in situ observations with satellite precipitation estimates. J. Geophys. Res. Atmos. 2014, 119, 1806–1819. [Google Scholar] [CrossRef]
- Zhang, G.; Tian, G.; Cai, D.; Bai, R.; Tong, J. Merging radar and rain gauge data by using spatial–temporal local weighted linear regression kriging for quantitative precipitation estimation. J. Hydrol. 2021, 601, 126612. [Google Scholar] [CrossRef]
- Shao, Y.; Fu, A.; Zhao, J.; Xu, J.; Wu, J. Improving quantitative precipitation estimates by radar-rain gauge merging and an integration algorithm in the Yishu River catchment, China. Theor. Appl. Climatol. 2021, 144, 611–623. [Google Scholar] [CrossRef]
- Marshall, J.S.; Palmer, W. The distribution of raindrops with size. J Meteor. 1948, 5, 165–166. [Google Scholar] [CrossRef]
- Fujiwara, M. Raindrop-size distribution from individual storms. J. Atmos. Sci. 1965, 22, 585–591. [Google Scholar] [CrossRef]
- Martens, B.; Cabus, P.; Jongh, I.D.; Verhoest, N. Merging weather radar observations with ground-based measurements of rainfall using an adaptive multiquadric surface fitting algorithm. J. Hydrol. 2013, 500, 84–96. [Google Scholar] [CrossRef]
- Jorgensen, D.P.; Willis, P.T. A Z-R relationship for hurricanes. J. Appl. Meteorol. Climatol. 1982, 21, 356–366. [Google Scholar] [CrossRef]
- Lee, G.W. Sources of errors in rainfall measurements by Polarimetric radar: Variability of drop size distributions, observational noise, and variation of relationships between R and Polarimetric parameters. J. Atmos. Ocean. Technol. 2006, 23, 1005–1028. [Google Scholar] [CrossRef]
- Wu, W.X.; Zou, H.B.; Shan, J.S.; Wu, S.S. A dynamical Z-R relationship for precipitation estimation based on radar echo-top height classification. Adv. Meteorol. 2018, 2018, 8202031. [Google Scholar] [CrossRef]
- Huang, H.; Zhao, K.; Chen, H.; Hu, D.; Fu, P.; Lin, Q.; Yang, Z. Improved attenuation-based radar precipitation estimation considering the azimuthal variabilities of microphysical properties. J. Hydrometeorol. 2020, 21, 1605–1620. [Google Scholar] [CrossRef]
- Kim, T.J.; Kwon, H.H.; Kim, K.B. Calibration of the reflectivity-rainfall rate (ZR) relationship using long-term radar reflectivity factor over the entire South Korea region in a Bayesian perspective. J. Hydrol. 2021, 593, 125790. [Google Scholar] [CrossRef]
- Wang, G.; Liu, L.; Ding, Y. Improvement of Radar Quantitative Precipitation Estimation Based on Real-Time Adjustments to Z--R Relationships and Inverse Distance Weighting Correction Schemes. Adv. Atmos. Sci. 2012, 29, 575–584. [Google Scholar] [CrossRef]
- Alfieri, L.; Claps, P.; Laio, F. Time-dependent Z-R relationships for estimating rainfall fields from radar measurements. Nat. Hazards Earth Syst. Sci. 2010, 10, 149–158. [Google Scholar] [CrossRef]
- Kuang, Q.M.; Yang, X.B.; Zhang, W.S.; Zhang, G.P. Spatiotemporal modeling and implementation for radar-based rainfall estimation. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1601–1605. [Google Scholar] [CrossRef]
- Wolfensberger, D.; Gabella, M.; Boscacci, M.; Germann, U.; Berne, A. RainForest: A random forest algorithm for quantitative precipitation estimation over Switzerland. Atmos. Meas. Tech. 2021, 14, 3169–3193. [Google Scholar] [CrossRef]
- Suykens, K.J.A.; Vandewalle, J. Least squares support vector machine classifiers. Neural Process. Lett. 1999, 9, 293–300. [Google Scholar] [CrossRef]
- Sehad, M.; Lazri, M.; Ameur, S. Novel SVM-based technique to improve rainfall estimation over the Mediterranean region (north of Algeria) using the multispectral MSG SEVIRI imagery. Adv. Space Res. 2017, 59, 1381–1394. [Google Scholar] [CrossRef]
- Hilburn, K.A.; Ebert-Uphoff, I.; Miller, S.D. Development and interpretation of a neural-network-based synthetic radar reflectivity estimator using GOES-R satellite observations. J. Appl. Meteorol. Clim. 2021, 60, 3–21. [Google Scholar] [CrossRef]
- Mayer, K.J.; Barnes, E.A. Subseasonal forecasts of opportunity identified by an explainable neural network. Geophys. Res. Lett. 2021, 48, e2020GL092092. [Google Scholar] [CrossRef]
- McGovern, A.; Lagerquist, R.; John Gagne, D.; Jergensen, G.E.; Elmore, K.L.; Homeyer, C.R.; Smith, T. Making the black box more transparent: Understanding the physical implications of machine learning. Bull. Am. Meteorol. Soc. 2019, 100, 2175–2199. [Google Scholar] [CrossRef]
- Silva, S.J.; Keller, C.A.; Hardin, J. Using an explainable machine learning approach to characterize Earth System model errors: Application of SHAP analysis to modeling lightning flash occurrence. J. Adv. Model. Earth Syst. 2022, 14, e2021MS002881. [Google Scholar] [CrossRef]
- Toms, B.A.; Barnes, E.A.; Hurrell, J.W. Assessing decadal predictability in an Earth-System model using explainable neural networks. Geophys. Res. Lett. 2021, 48, e2021GL093842. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. XGBoost: A Scalable Tree Boosting System. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; ACM: New York, NY, USA, 2016; pp. 785–794. [Google Scholar]
- Stirnberg, R.; Cermak, J.; Kotthaus, S.; Haeffelin, M.; Andersen, H.; Fuchs, J. Meteorology-driven variability of air pollution (PM1) revealed with explainable machine learning. Atmos. Chem. Phys. 2021, 21, 3919–3948. [Google Scholar] [CrossRef]
- Grinsztajn, L.; Oyallon, E.; Varoquaux, G. Why do tree-based models still outperform deep learning on typical tabular data? Adv. Neural Inf. Process. Syst. 2022, 35, 507–520. [Google Scholar]
- Li, S.; Qin, J.; He, M.; Paoli, R. Fast Evaluation of Aircraft Icing Severity Using Machine Learning Based on XGBoost. Aerospace 2020, 7, 36. [Google Scholar] [CrossRef]
- Ke, G.; Meng, Q.; Finley, T.; Wang, T.; Chen, W.; Ma, W.; Ye, Q.W.; Liu, T.Y. LightGBM: A highly efficient gradient boosting decision tree. Adv. Neural Inf. Process. Syst. 2017, 30, 3146–3154. [Google Scholar]
- Han, L.; Sun, J.; Zhang, W.; Xiu, Y.; Feng, H.; Lin, Y. A machine learning nowcasting method based on real-time reanalysis data. J. Geophys. Res. Atmos. 2017, 122, 4038–4051. [Google Scholar] [CrossRef]
- Yu, Y.; Gille, S.T.; Sandwell, D.T. Global mesoscale ocean variability from multiyear altimetry: An analysis of the influencing factors. Artif. Intell. Earth Syst. 2022, 1, e210008. [Google Scholar] [CrossRef]
- Qian, Q.F.; Jia, X.J.; Lin, H. Seasonal forecast of non-monsoonal winter precipitation over the Eurasian continent using machine-learning models. J. Clim. 2021, 34, 7113–7129. [Google Scholar] [CrossRef]
- Devore, J.L. Probability and Statistics for Engineering and the Sciences; Cengage Learning: Boston, MA, USA, 2011; p. 768. [Google Scholar]
- Lundberg, S.M.; Erion, G.; Chen, H.; DeGrave, A.; Prutkin, J.M.; Nair, B. From local explanations to global understanding with explainable AI for trees. Nat. Mach. Intell. 2020, 2, 56–67. [Google Scholar] [CrossRef]
- Molnar, C. Interpretable Machine Learning: A Guide for Making Black Box Models Explainable; Leanpub: Victoria, BC, Canada, 2019. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Ref00 | Ref01 | Ref02 | Ref03 | Ref04 | Ref05 | Ref06 | Ref07 |
| Height (m) | 500 | 1000 | 1500 | 2000 | 2500 | 3000 | 3500 | 4000 |
| Level | Ref08 | Ref09 | Ref10 | Ref11 | Ref12 | Ref13 | Ref14 | Ref15 |
| Height (m) | 4500 | 5000 | 5500 | 6000 | 6500 | 7000 | 7500 | 8000 |
| Level | Ref16 | Ref17 | Ref18 | Ref19 | Ref20 | Ref21 | Ref22 | Ref23 |
| Height (m) | 8500 | 9000 | 9500 | 10,000 | 10,500 | 11,000 | 11,500 | 12,000 |
| Algorithm | Experiments | Description | MAE | MSLE | R2 Score | CORR |
|---|---|---|---|---|---|---|
| LightGBM 3D | Exe 1 | 24 levels 1 point | 0.017 | 0.005 | 0.423 | 0.680 |
| Exe 2 | 24 levels 9 points | 0.015 | 0.004 | 0.494 | 0.722 | |
| LightGBM 2D | Exe 3 | CR 9 points | 0.017 | 0.005 | 0.283 | 0.598 |
| Z–R | Exe 4 | Z–R Ref00 | 0.028 | 0.009 | −5.027 | 0.422 |
| Exe 5 | Z–R Ref01 | 0.041 | 0.010 | −8.715 | 0.554 | |
| Exe 6 | Z–R Ref02 | 0.051 | 0.011 | −12.846 | 0.607 | |
| Exe 7 | Z–R Ref03 | 0.054 | 0.011 | −13.570 | 0.656 | |
| Exe 8 | Z–R Ref04 | 0.056 | 0.012 | −14.926 | 0.650 | |
| Exe 9 | Z–R Ref05 | 0.058 | 0.012 | −17.794 | 0.636 | |
| Exe 10 | Z–R CR | 0.133 | 0.031 | −58.296 | 0.535 |
| Algorithm | Experiments | Description | MAE | MSLE | R2 Score | CORR |
|---|---|---|---|---|---|---|
| LightGBM 3D | Exe 1 | 24 levels 1 point | 0.022 | 0.006 | 0.396 | 0.653 |
| Exe 2 | 24 levels 9 points | 0.021 | 0.005 | 0.491 | 0.739 | |
| LightGBM 2D | Exe 3 | CR 9 points | 0.023 | 0.007 | 0.328 | 0.616 |
| Z–R | Exe 4 | Z–R Ref00 | 0.027 | 0.010 | −0.121 | 0.337 |
| Exe 5 | Z–R Ref01 | 0.029 | 0.007 | −0.658 | 0.547 | |
| Exe 6 | Z–R Ref02 | 0.031 | 0.006 | −4.565 | 0.424 | |
| Exe 7 | Z–R Ref03 | 0.028 | 0.006 | −1.048 | 0.619 | |
| Exe 8 | Z–R Ref04 | 0.028 | 0.006 | −0.537 | 0.604 | |
| Exe 9 | Z–R Ref05 | 0.028 | 0.007 | −0.345 | 0.583 | |
| Exe 10 | Z–R CR | 0.064 | 0.015 | −31.059 | 0.255 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Chu, H.; Liu, Q.; Chen, B.; Zhang, X.; Fan, X.; Wu, J.; Xu, K.; Jiang, F.; Chen, L. Application of Machine Learning Techniques to Improve Multi-Radar Mosaic Precipitation Estimates in Shanghai. Atmosphere 2023, 14, 1364. https://doi.org/10.3390/atmos14091364
Wang R, Chu H, Liu Q, Chen B, Zhang X, Fan X, Wu J, Xu K, Jiang F, Chen L. Application of Machine Learning Techniques to Improve Multi-Radar Mosaic Precipitation Estimates in Shanghai. Atmosphere. 2023; 14(9):1364. https://doi.org/10.3390/atmos14091364
Chicago/Turabian StyleWang, Rui, Hai Chu, Qiyang Liu, Bo Chen, Xin Zhang, Xuliang Fan, Junjing Wu, Kang Xu, Fulin Jiang, and Lei Chen. 2023. "Application of Machine Learning Techniques to Improve Multi-Radar Mosaic Precipitation Estimates in Shanghai" Atmosphere 14, no. 9: 1364. https://doi.org/10.3390/atmos14091364
APA StyleWang, R., Chu, H., Liu, Q., Chen, B., Zhang, X., Fan, X., Wu, J., Xu, K., Jiang, F., & Chen, L. (2023). Application of Machine Learning Techniques to Improve Multi-Radar Mosaic Precipitation Estimates in Shanghai. Atmosphere, 14(9), 1364. https://doi.org/10.3390/atmos14091364