1. Introduction
When Jack Herring’s mid-1960s convection papers [
1,
2,
3] were published, there were already, as there are now, two primary predictions for the dependence of the dimensionless heat flux, the Nusselt number,
, upon the Rayleigh number,
. From Malkus [
4,
5] and Kraichnan [
6], a scaling law for modest Rayleigh numbers was derived; from Kraichnan, an upper bound on the scaling for asymptotically large
was derived, suggesting, respectively,
where the variables are as follows:
is the linear coefficient of expansion;
g is the gravitational acceleration;
is the temperature difference between the hot and cold walls;
d is the depth;
is the thermal conductivity; and
is the kinematic viscosity. A
∼
scaling law had also been suggested by Spiegel [
7].
To obtain some numerical insight into whether either prediction might hold, Herring used very elementary numerics that incorporated the primary assumptions described by Malkus and Veronis [
5]. Using a few horizontal Fourier modes at most, the variables of the reduced dynamics were the vertical profiles of the poloidal vertical velocities and temperatures. Velocities and the vertical vorticity from the toroidal component [
8] were neglected. The goal was to find steady-state solutions by iterating in time. For the primary calculations, only one Fourier mode was used and, in each case, the
∼
scaling prediction was supported, with geometric and Reynolds-number-dependent coefficients,
C, in approximate agreement with 1990s-era direct numerical simulations (DNS) for both free(-slip) [
9] and no-slip (rigid) boundaries [
10]. No evidence was found for an ultra-high Rayleigh number
∼
regime.
This review begins by describing the reduced equations and the iteration method and then the results. First the free-slip calculations will be discussed, and then we will move on to those with rigid boundaries. The 1966 paper is not discussed in any detail because the 1963 scaling results are repeated. Then there is a discussion of energy budgets, the relationships to the first DNS direct numerical simulations and the overall message.
2. Governing Equations
The full incompressible Navier–Stokes–Boussinesq equations for the velocity vector
and temperature fields
for Prandtl number
are:
From these equations, the dimensional variables (denoted by primes) are made non-dimensional using the depth
d of the convection cell and
.
The double curl has eliminated the pressure from the equations and by considering only the poloidal component, one is left with only one velocity component: the vertical velocity
. The temperature field
is then separated into a fluctuating part
and a horizontally uniform background field
.
where
is the horizontally averaged temperature. The boundary conditions at
and
on the temperature components are
Upon horizontally averaging the equations, and removing all except one of the horizontal advection and second-order fluctuation terms, the system can be reduced further, with the exception being the vertical heat transport
that is forcing the horizontally averaged temperature
and its derivative
.
where
. This is the later 1964 version of the reduced Equations [
2].
The horizontally fluctuating terms are then decomposed into horizontal Fourier modes and , where represents a horizontal wavenumber .
There are two nonlinear terms. in (9) and in (10). Today, these terms would be found in physical space, transformed to Fourier space using an FFT, derivatives taken, then transformed back to z-profiles. These calculations were pre-FFT, so the derivatives in the nonlinear terms are included using convolution—that is, summing in Fourier space the nonlinear, multiplied terms.
Once the time derivatives are set, time-iteration using simple forwards Euler is applied to determine if a steady state can be reached. If a steady state is obtained, this question can be posed: Are the steady-state solutions for the two geometries, free-slip and rigid, consistent with our current understanding, numerical or experimental, of convection in those geometries?
3. Herring 1963 Results
In a 1963 paper [
1], only one horizontal Fourier mode was used in each simulation and the vertical profiles of all the variables expanded as sums of vertical sine functions. This imposes free-slip boundaries at
and 1 and makes the convolution sums for the nonlinear terms particularly easy.
Choosing values of
and the Rayleigh number that would support convection and not be unstable was not trivial. One restriction due to marginal stability [
8] is that the system will not support convection if
In Section 5 of Ref. [
1], the stability is summarized with its Figure 17, including an observation that a small
is enormously unstable. The figures below come from the stable range of
and
.
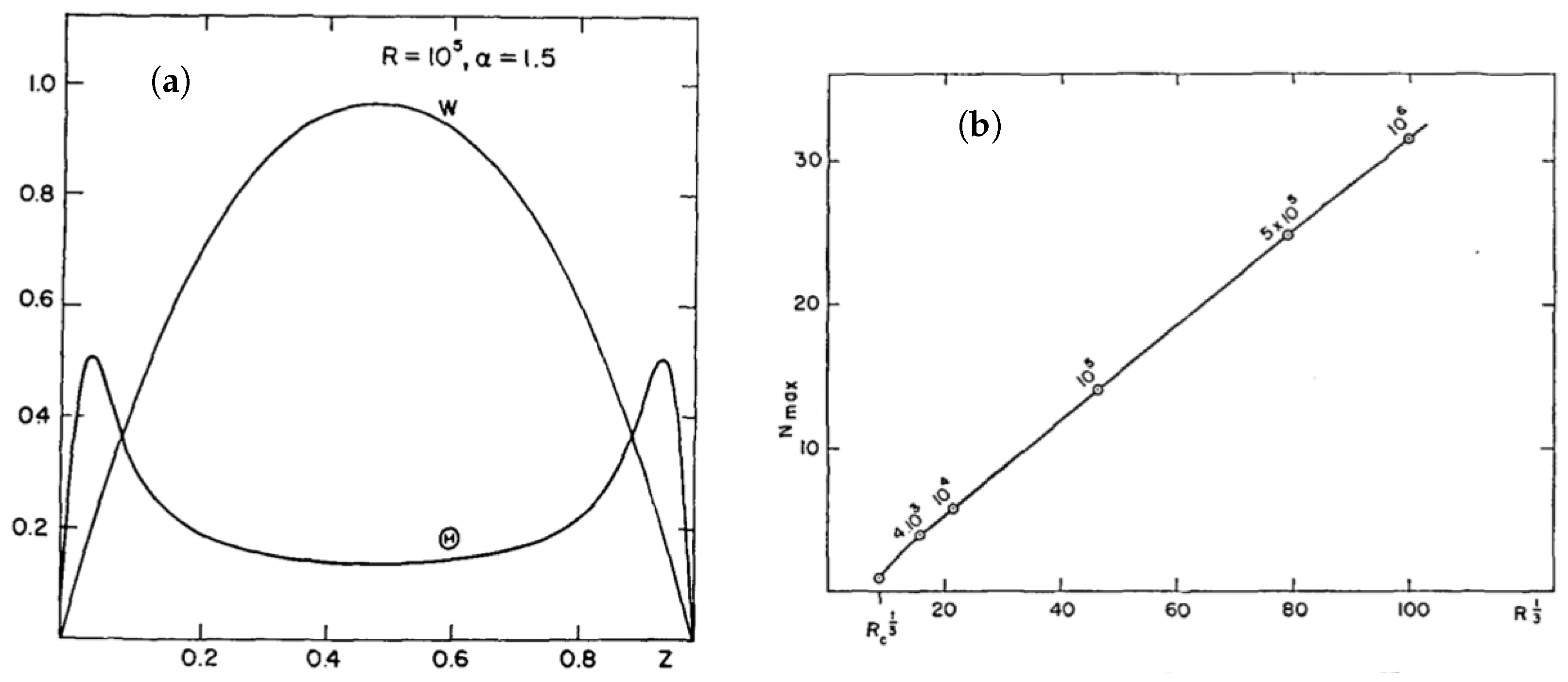
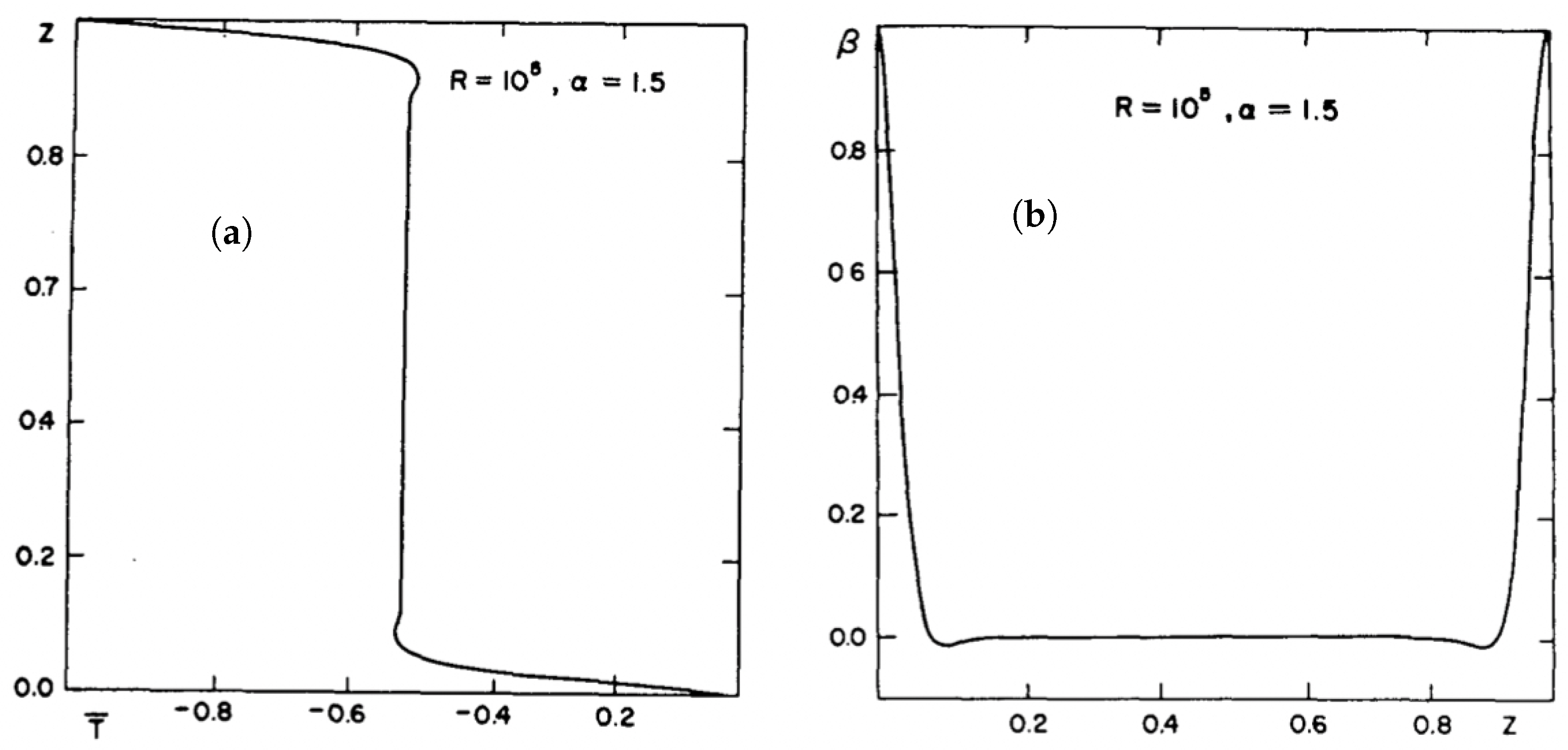
As
increases, the variations in the boundary layers become stronger, with profiles that are qualitatively similar to those from free-slip DNS [
9]. Furthermore, the fit for
(1) gives
, which with some digging, is exactly what the free-slip DNS finds for
with
[
9].
4. Herring 1964 Results
In the 1964 paper, rigid, no-slip boundary conditions were applied [
2].
However, applying the sine function algorithms used for the free-slip calculations directly to the rigid case is impossible because at each wall the vertical velocity has two boundary conditions, not one.
To handle this, in the appendix of [
2], inhomogeneous combinations of sinh and cosh functions [
8] of
are added to terms based upon sines. The inhomogeneous parts allow all four boundary conditions in (12) to be satisfied. Then, Green’s functions relating those inhomogeneous plus homogeneous functions to sines are computed.
With those Green functions, a time-advancing iteration procedure analogous to Equations (8)–(10) can be implemented.
Furthermore, to make things simpler, the Prandtl number limit
→
∞,
→0 was taken, hoping that this would include the
∼1 of the air around us, an assumption that is partially borne out by the DNS of Kerr and Herring [
11].
5. Discussion
In the first paper [
1], it was shown how a single horizontal Fourier mode with simple parameterizations could generate the proposed
∼
scaling [
4] for the heat flux. In the second paper [
2], by imposing no-slip boundary conditions on the velocity, instead of free-slip, it was shown how two results could be generated and this was consistent with the observations: the coefficient on the
scaling and the vertical profiles of
w and
.
However, this unanswered remains question: Does the asymptotic Kraichnan [
6] upper bound for high Rayleigh number scaling,
∼
, have any relevance? Today, this hypothetical regime is called the ultimate regime.
The third paper [
3] was an attempt to pre-condition and accelerate the iteration towards a steady state in order to determine whether there might be additional scaling laws at much higher Rayleigh numbers, as suggested by that upper bound. The pre-conditioning was only applied to the free-slip geometry and there was no evidence for any new regimes as the earlier free-slip results [
1] were reproduced.
Another concept being introduced to numerics was the role of what we now call the energy budget [
1]. For Rayleigh-Bénard convection, there are two energy functions,
the kinetic energy
[
5] and the potential energy
, which is called entropy in the paper. The
v-subscripts indicate integration over the volume and the total energy is
. The
equation is
The energy flow in this reduced system of just , and is as follows:
The inflow begins as the vertical velocity w interacts with the mean temperature gradient in (9), whose volume integral is .
then flows to the kinetic energy through the term in (8).
This is then dissipatively removed by
inverting the
term of (8):
Meanwhile, is modified by (10).
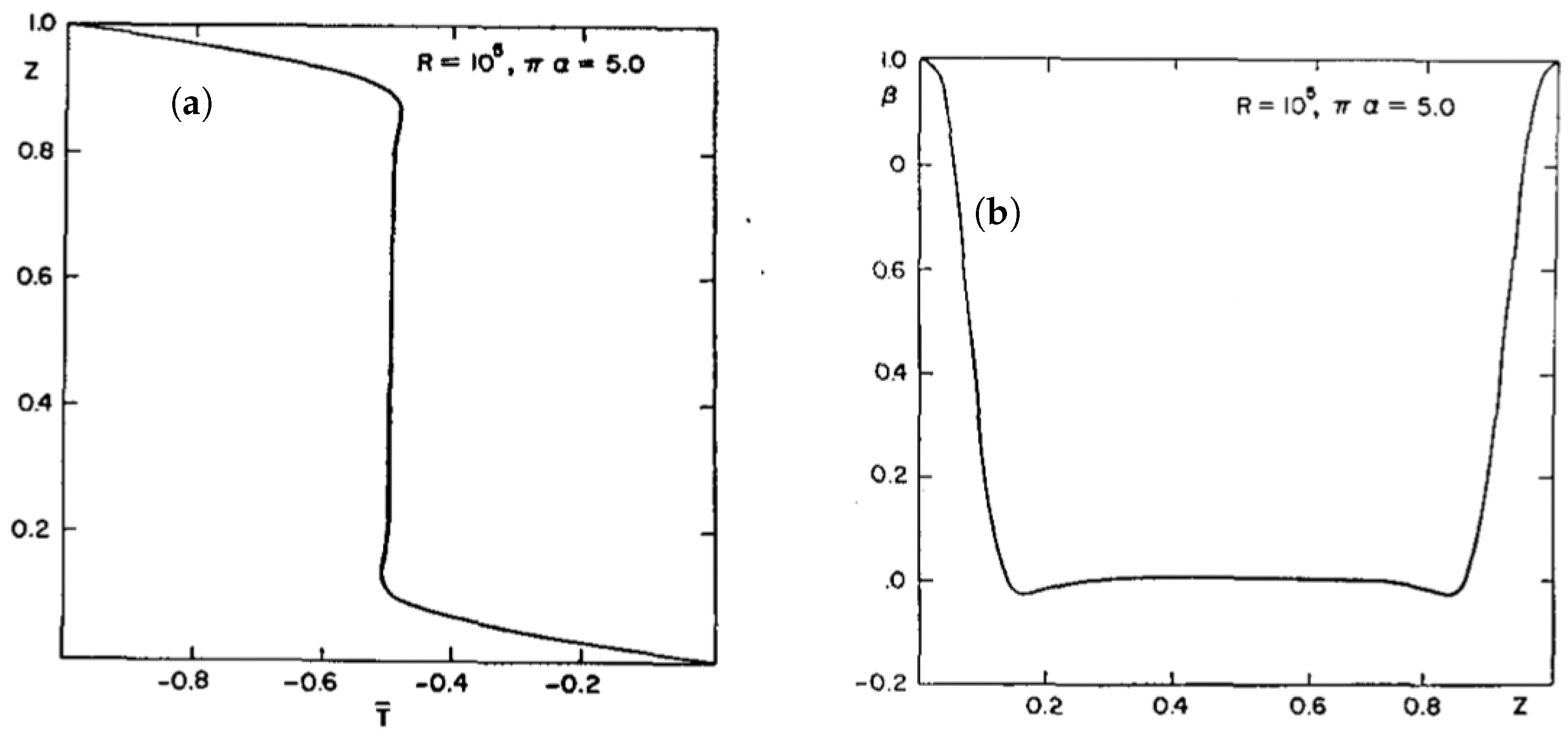
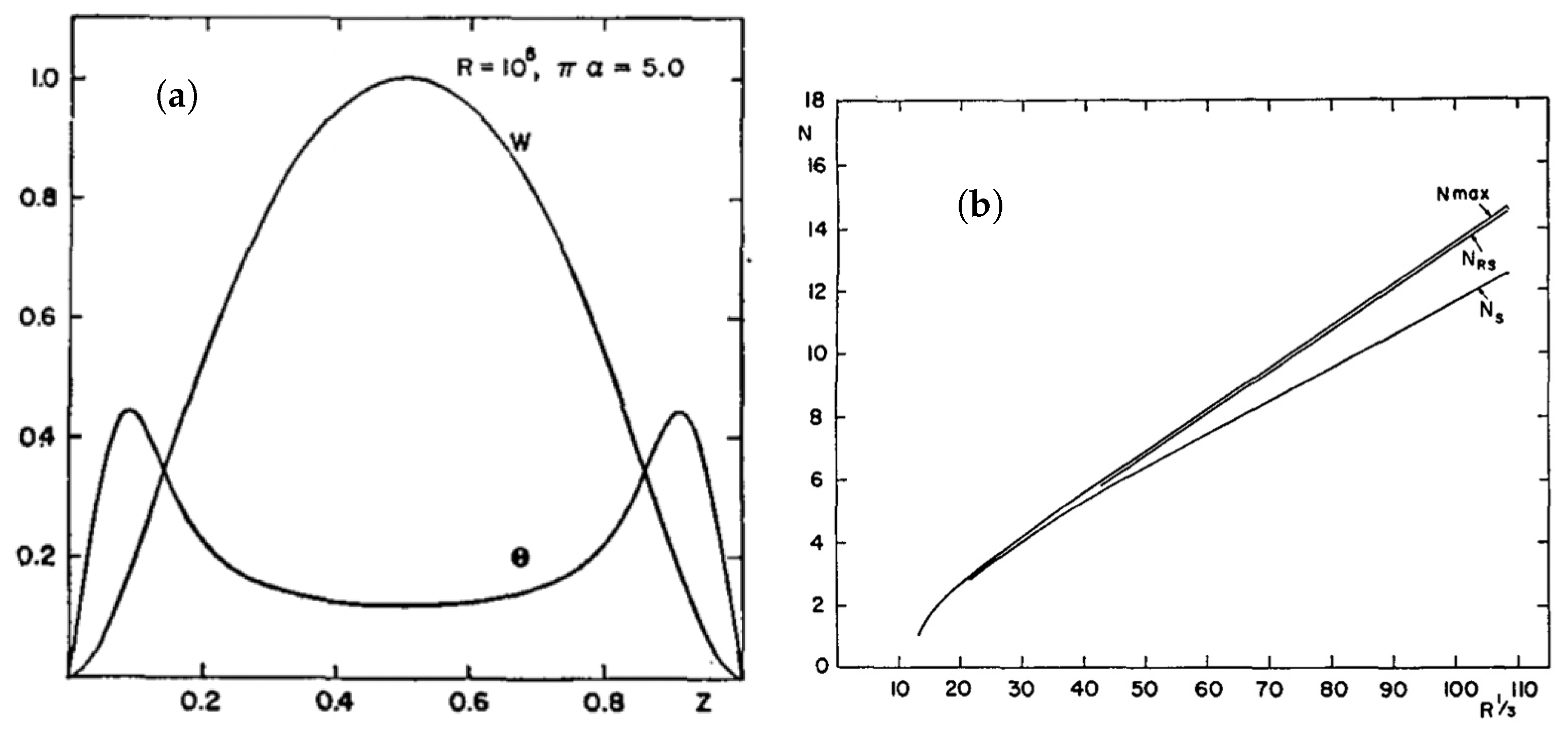
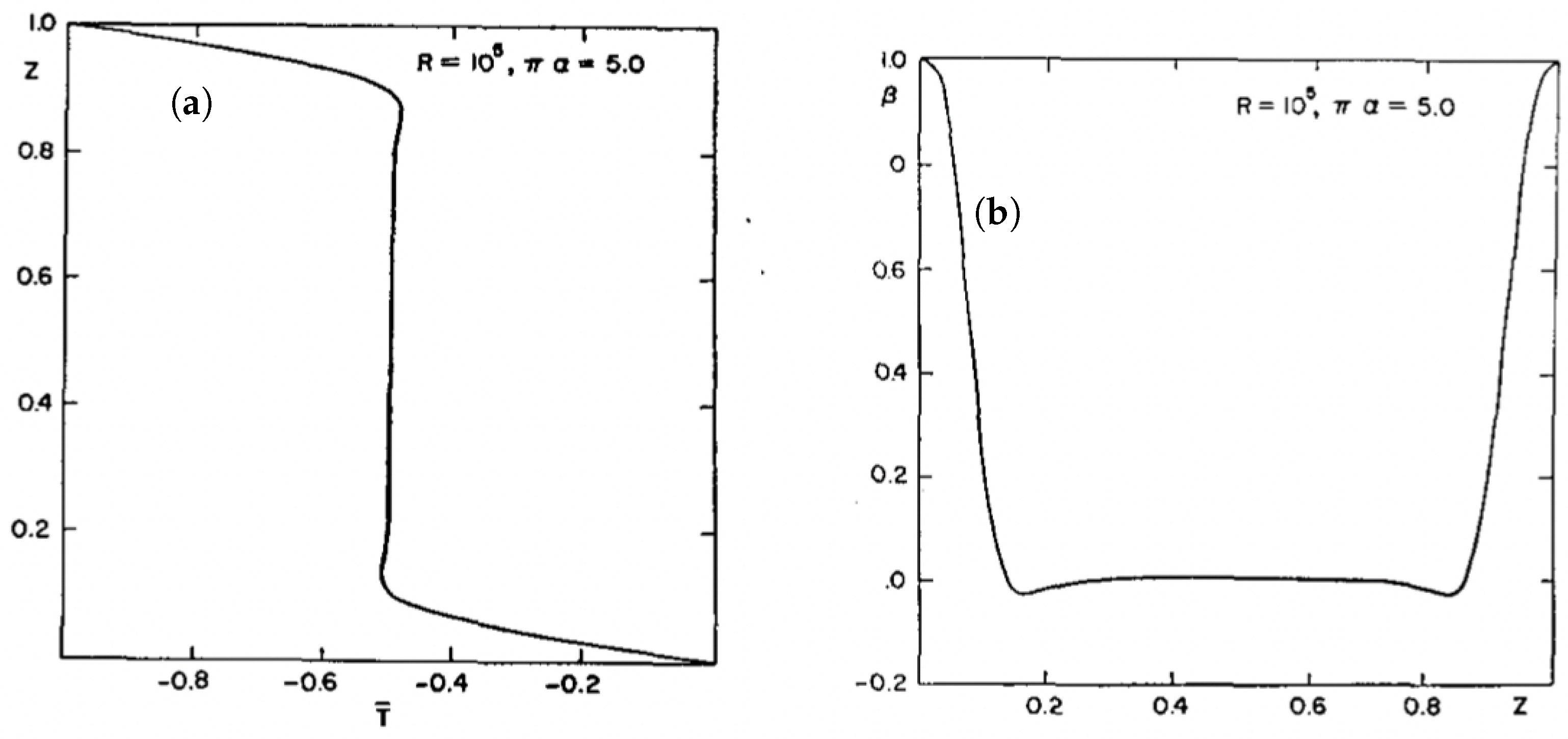
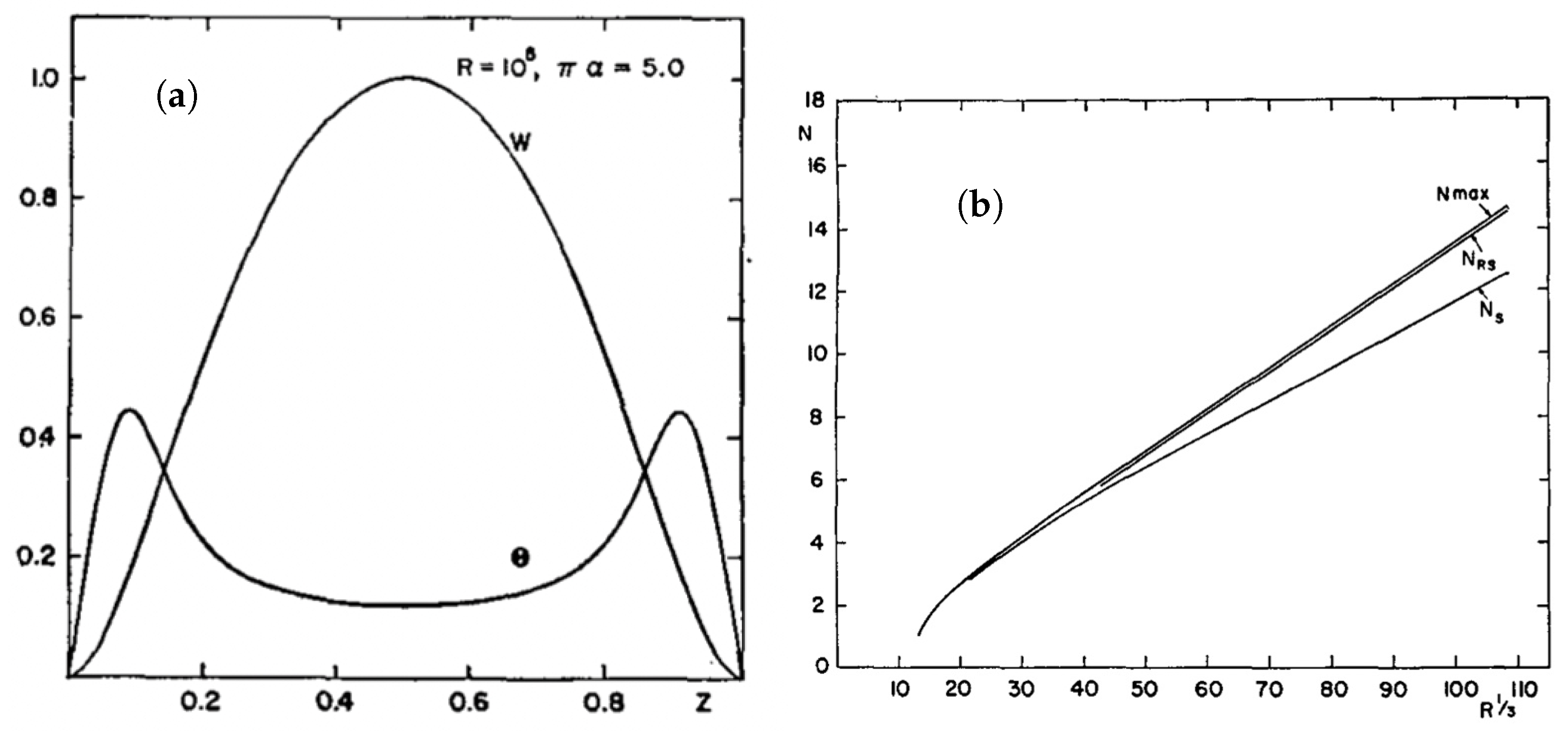
Similarities and differences.Figure 1 and
Figure 2 for no-slip boundaries have the following similarities with, and differences from, the free-slip results in
Figure 3 and
Figure 4,
and profiles are similar. Except at the walls where ∼0.
Similarly for and , except again at the walls.
For no-slip (rigid) walls the coefficient in front of the
given in the abstract is
and is within 20% of the experiments. And consistent with
DNS [
10] for which
∼
if strictly
∼
scaling is assumed.
The overall message is that, even for these early calculations, to obtain physical convective heat fluxes, rigid (no-slip) boundary conditions were required. This influenced my decision [
10] to skip free-slip boundaries and proceed straight to the task of simulating thermal convection with no-slip boundaries.





{kind=link}
{kind=link}
{kind=link}
{kind=link}