
Uncertainty in the Mobile Observation of Wind

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
3. Results and Discussion
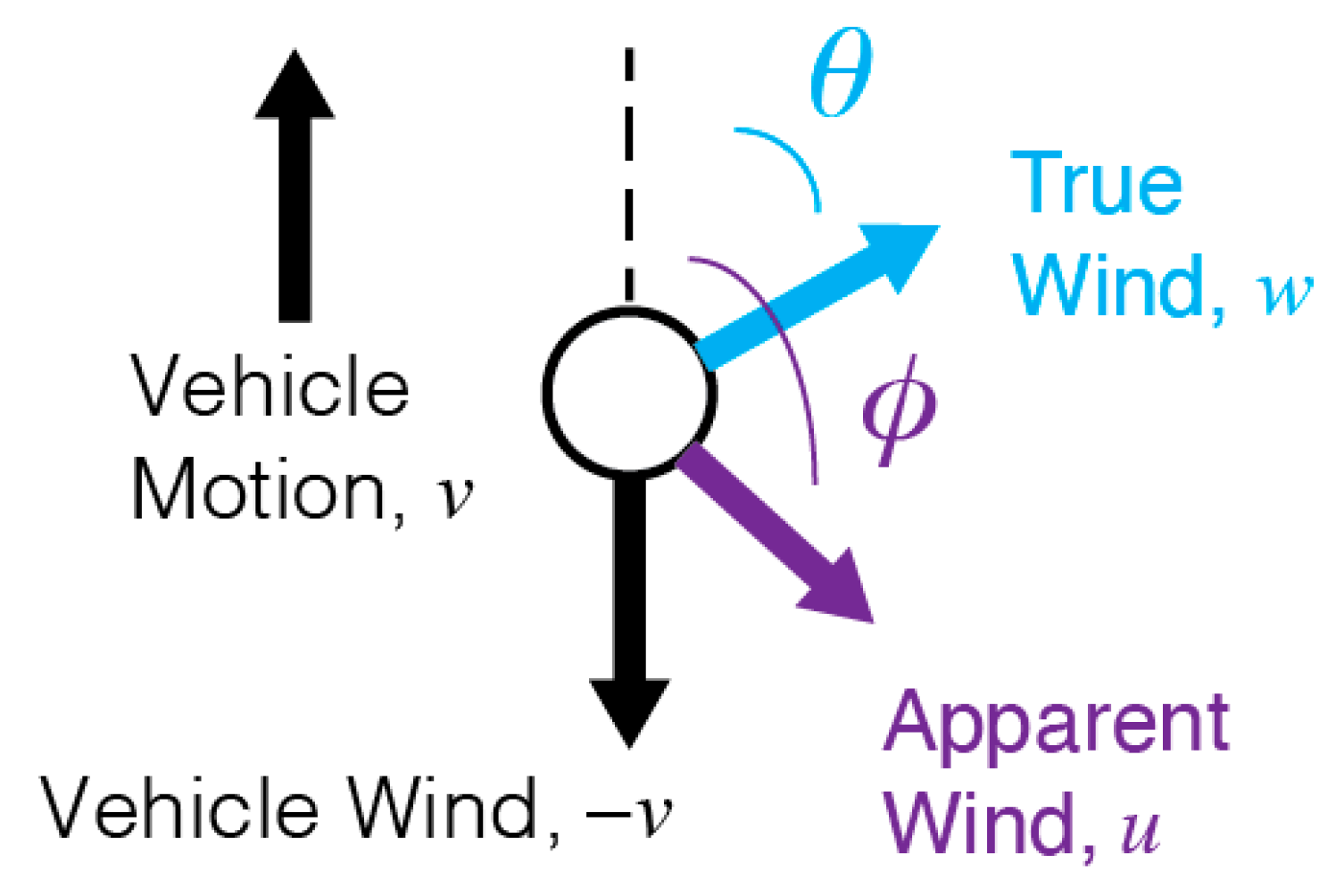
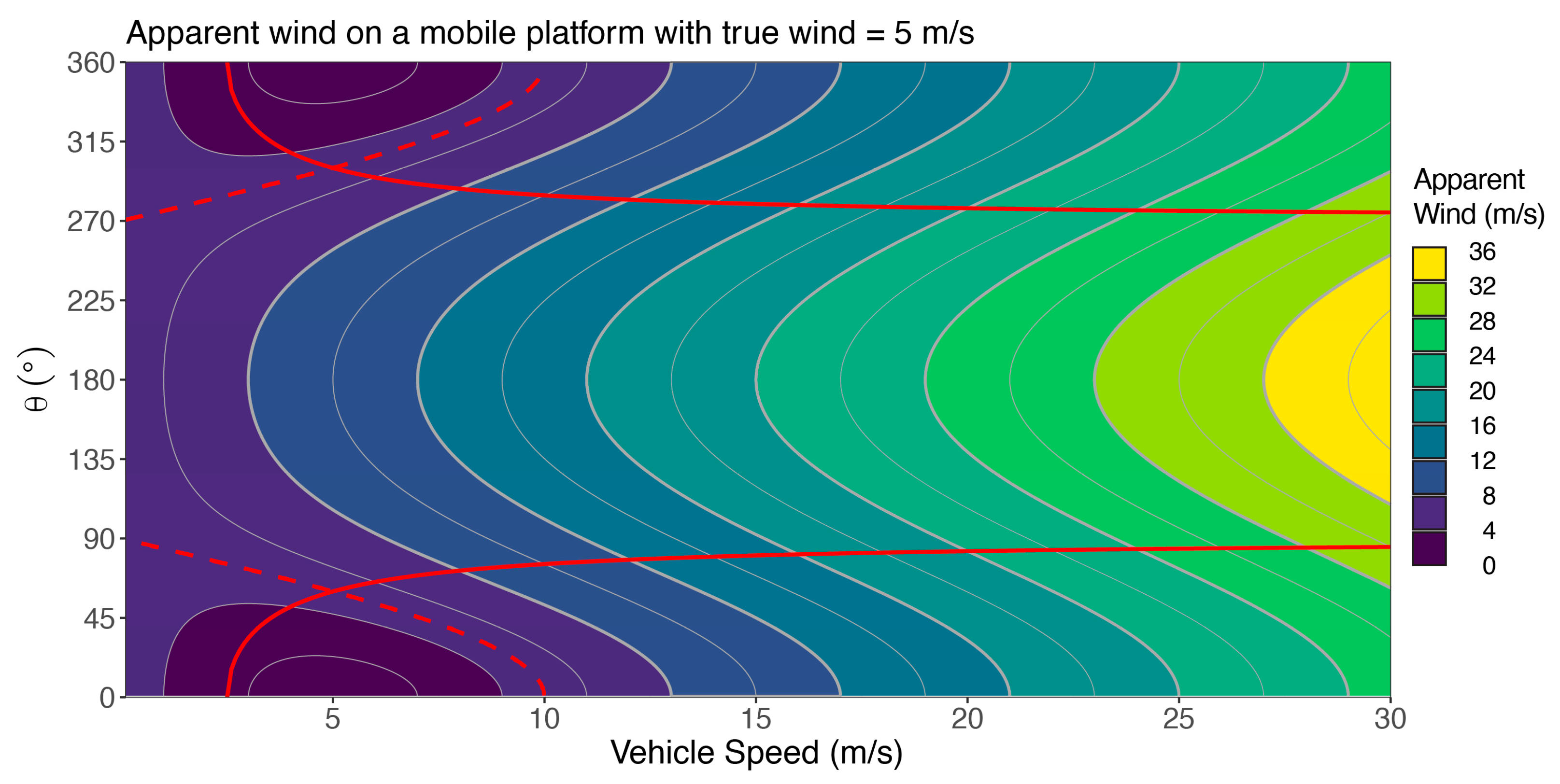
3.1. Distinguishing True Wind from Apparent Wind
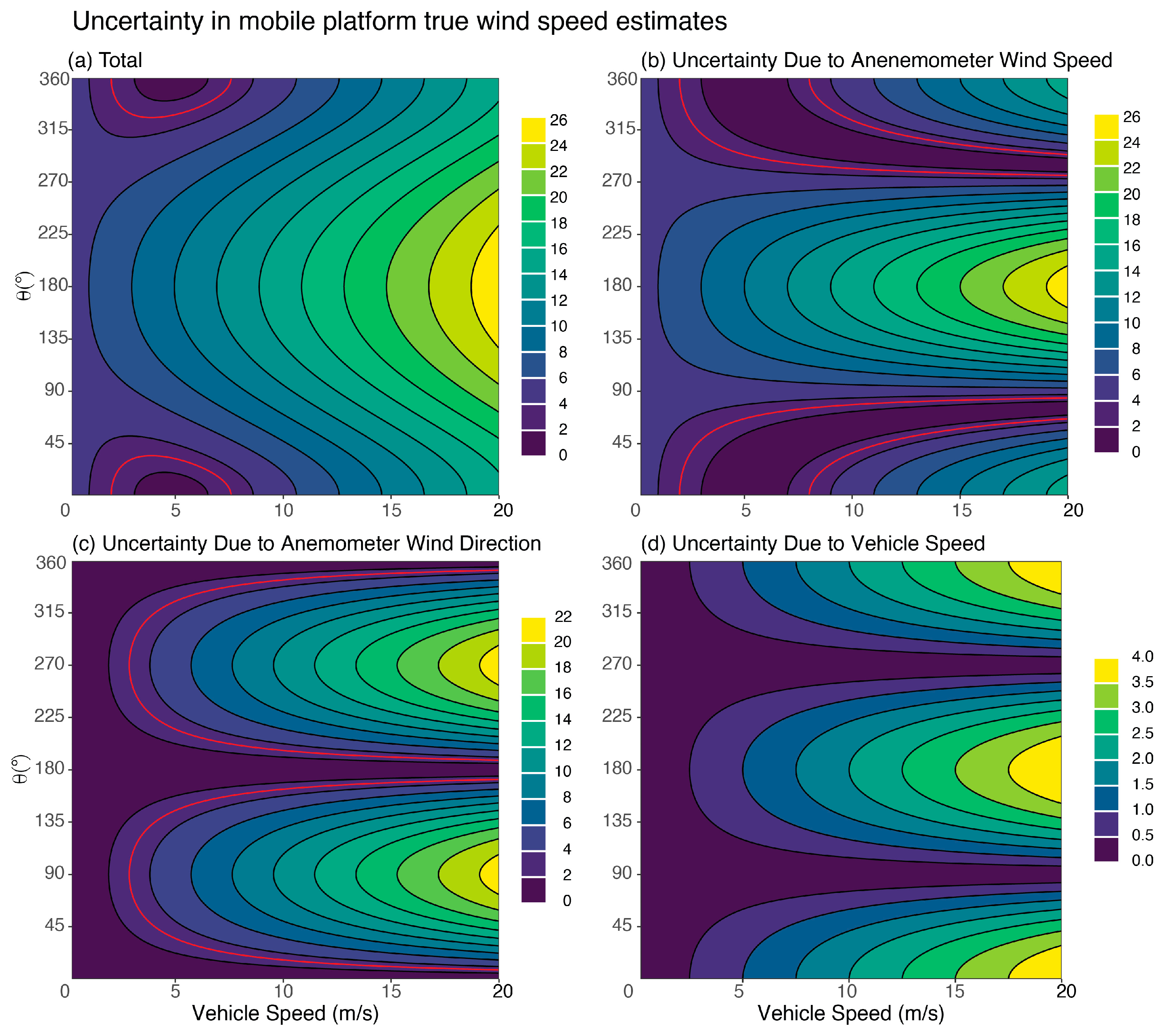
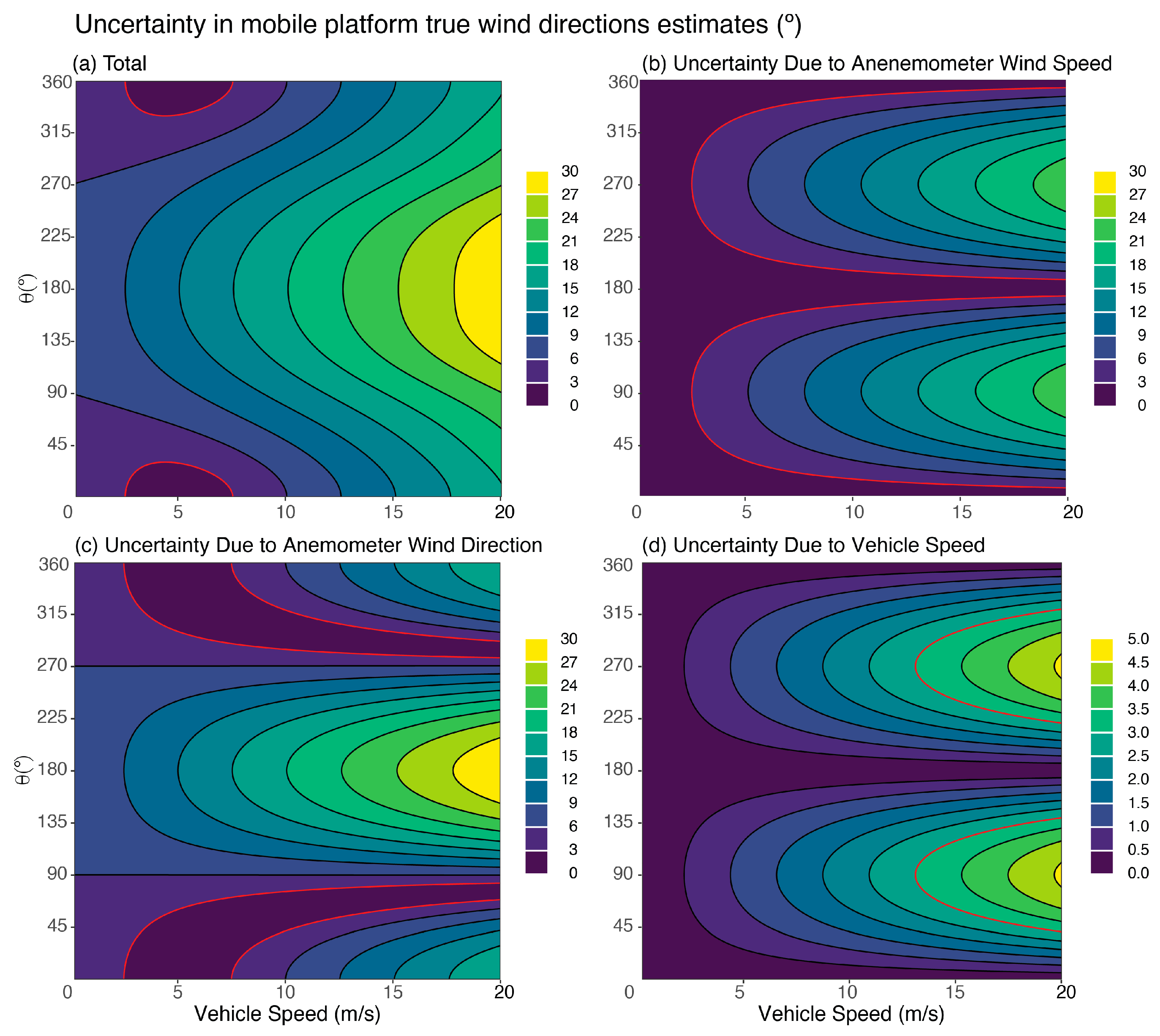
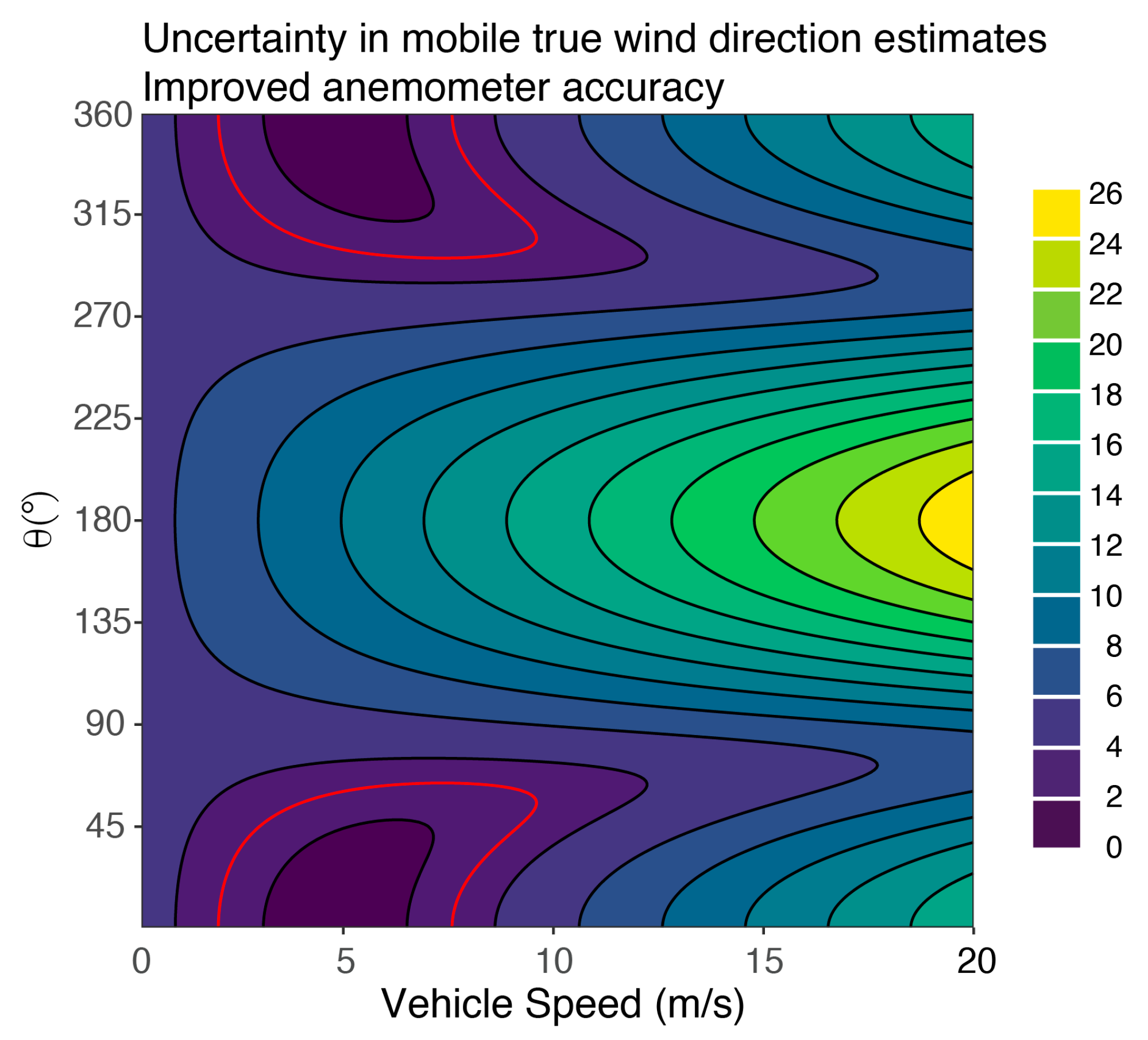
3.2. Uncertainty in True Wind Estimation
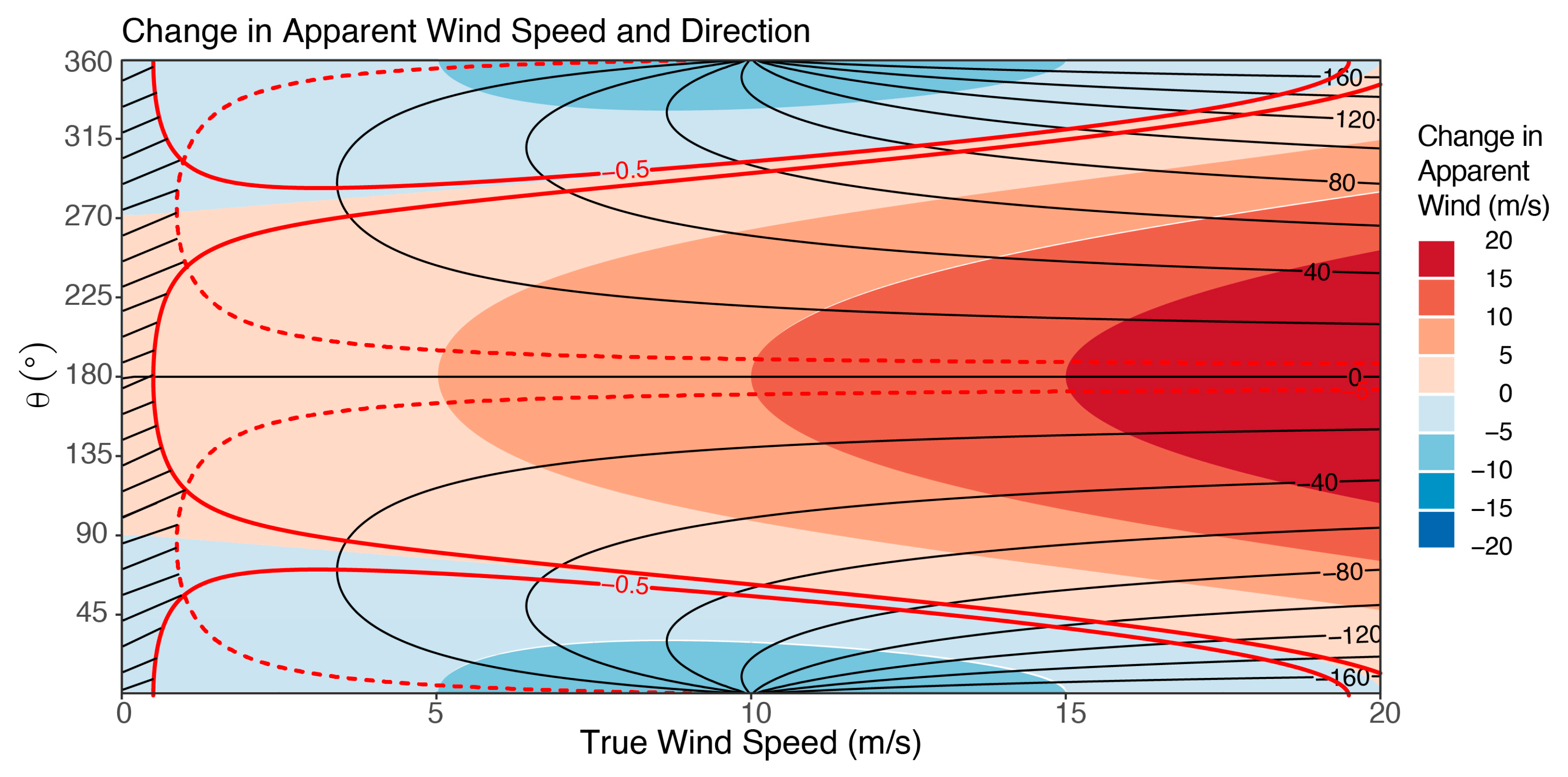
3.3. Additional Sources of Uncertainty
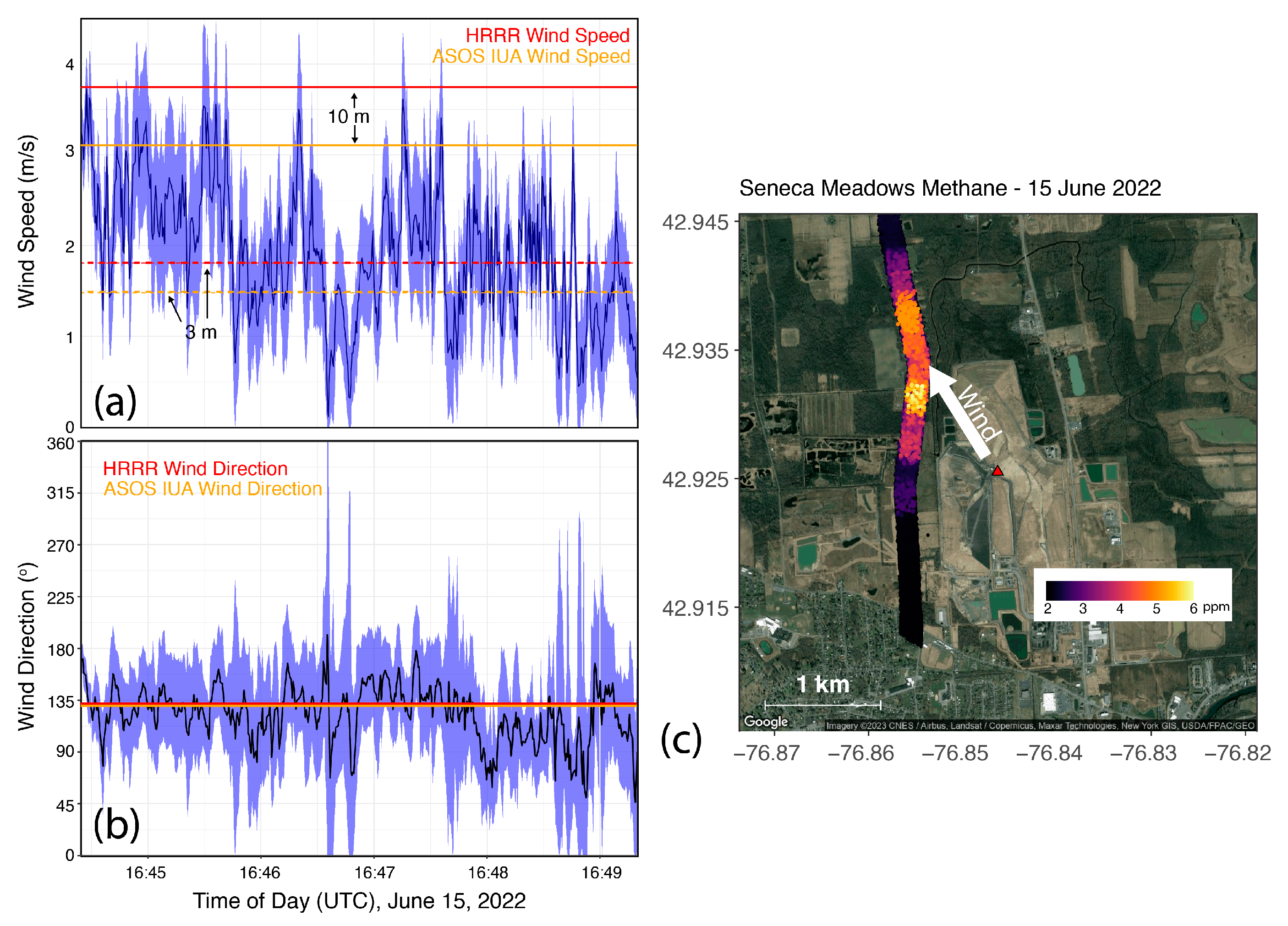
3.4. Example—Transect across a Plume
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Belušić, D.; Lenschow, D.H.; Tapper, N.J. Performance of a mobile car platform for mean wind and turbulence measurements. Atmos. Meas. Tech. 2014, 7, 1825–1837. [Google Scholar] [CrossRef]
- Miller, S.J.; Gordon, M.; Staebler, R.M.; Taylor, P.A. A Study of the Spatial Variation of Vehicle-Induced Turbulence on Highways Using Measurements from a Mobile Platform. Boundary-Layer Meteorol. 2019, 171, 1–29. [Google Scholar] [CrossRef]
- De Boer, G.; Waugh, S.; Erwin, A.; Borenstein, S.; Dixon, C.; Shanti, W.; Houston, A.; Argrow, B. Measurements from mobile surface vehicles during the Lower Atmospheric Profiling Studies at Elevation—A Remotely-piloted Aircraft Team Experiment (LAPSE-RATE). Earth Syst. Sci. Data 2021, 13, 155–169. [Google Scholar] [CrossRef]
- Miller, S.J.; Gordon, M. The measurement of mean wind, variances, and covariances from an instrumented mobile car in a rural environment. Atmos. Meas. Tech. 2022, 15, 6563–6584. [Google Scholar] [CrossRef]
- Caulton, D.R.; Li, Q.; Bou-Zeid, E.; Fitts, J.P.; Golston, L.M.; Pan, D.; Lu, J.; Lane, H.M.; Buchholz, B.; Guo, X.; et al. Quantifying uncertainties from mobile-laboratory-derived emissions of well pads using inverse Gaussian methods. Atmos. Chem. Phys. 2018, 18, 15145–15168. [Google Scholar] [CrossRef]
- Zhang, J.; Ninneman, M.; Joseph, E.; Schwab, M.J.; Shrestha, B.; Schwab, J.J. Mobile laboratory measurements of high surface ozone levels and spatial heterogeneity during LISTOS 2018: Evidence for sea breeze influence. J. Geophys. Res.-Atmos. 2019, 124, e2019JD031961. [Google Scholar] [CrossRef]
- Catena, A.M.; Zhang, J.; Commane, R.; Murray, L.T.; Schwab, M.J.; Leibensperger, E.M.; Marto, J.; Smith, M.L.; Schwab, J.J. Hydrogen Sulfide Emission Properties from Two Large Landfills in New York State. Atmosphere 2022, 13, 1251. [Google Scholar] [CrossRef]
- Boanini, C.; Mecca, D.; Pognant, F.; Bo, M.; Clerico, M. Integrated Mobile Laboratory for Air Pollution Assessment: Literature Review and cc-TrAIRer Design. Atmosphere 2021, 12, 1004. [Google Scholar] [CrossRef]
- Majluf, F.Y.; Krechmer, J.E.; Daube, C.; Knighton, W.B.; Dyroff, C.; Lambe, A.T.; Fortner, E.C.; Yacovitch, T.I.; Roscioli, J.R.; Herndon, S.C.; et al. Mobile Near-Field Measurements of Biomass Burning Volatile Organic Compounds: Emission Ratios and Factor Analysis. Environ. Sci. Technol. Lett. 2022, 9, 383–390. [Google Scholar] [CrossRef]
- Shah, A.; Allen, G.; Pitt, J.R.; Ricketts, H.; Williams, P.I.; Helmore, J.; Finlayson, A.; Robinson, R.; Kabbabe, K.; Hollingsworth, P.; et al. A Near-Field Gaussian Plume Inversion Flux Quantification Method, Applied to Unmanned Aerial Vehicle Sampling. Atmosphere 2019, 10, 396. [Google Scholar] [CrossRef]
- Viatte, C.; Lauvaux, T.; Hedelius, J.K.; Parker, H.; Chen, J.; Jones, T.; Franklin, J.E.; Deng, A.J.; Gaudet, B.; Verhulst, K.; et al. Methane emissions from dairies in the Los Angeles Basin. Atmos. Chem. Phys. 2017, 17, 7509–7528. [Google Scholar] [CrossRef]
- Golston, L.M.; Pan, D.; Sun, K.; Tao, L.; Zondlo, M.A.; Eilerman, S.J.; Peischl, J.; Neuman, J.A.; Floerchinger, C. Variability of Ammonia and Methane Emissions from Animal Feeding Operations in Northeastern Colorado. Environ. Sci. Technol. 2020, 54, 11015–11024. [Google Scholar] [CrossRef]
- Atherton, E.; Risk, D.; Fougère, C.; Lavoie, M.; Marshall, A.; Werring, J.; Williams, J.P.; Minions, C. Mobile Measurement of Methane Emissions from Natural Gas Developments in Northeastern British Columbia, Canada. Atmos. Chem. Phys. 2017, 17, 12405–12420. [Google Scholar] [CrossRef]
- Hoesly, R.M.; Smith, S.J.; Feng, L.; Klimont, Z.; Janssens-Maenhout, G.; Pitkanen, T.; Seibert, J.J.; Vu, L.; Andres, R.J.; Bolt, R.M.; et al. Historical (1750–2014) anthropogenic emissions of reactive gases and aerosols from the Community Emissions Data System (CEDS). Geosci. Model Dev. 2018, 11, 369–408. [Google Scholar] [CrossRef]
- Jacob, D.J.; Turner, A.J.; Maasakkers, J.D.; Sheng, J.; Sun, K.; Liu, X.; Chance, K.; Aben, I.; McKeever, J.; Frankenberg, C. Satellite observations of atmospheric methane and their value for quantifying methane emissions. Atmos. Chem. Phys. 2016, 16, 14371–14396. [Google Scholar] [CrossRef]
- Palmer, P.I.; Feng, L.; Lunt, M.F.; Parker, R.J.; Bösch, H.; Lan, X.; Lorente, A.; Borsdorff, T. The added value of satellite observations of methane for understanding the contemporary methane budget. Phil. Trans. R. Soc. A 2021, 379, 20210106. [Google Scholar] [CrossRef]
- Montzka, S.A.; Dutton, G.S.; Portmann, R.W.; Chipperfield, M.P.; Davis, S.; Feng, W.; Manning, A.J.; Ray, E.; Rigby, M.; Hall, B.D.; et al. A decline in global CFC-11 emissions during 2018–2019. Nature 2021, 590, 428–432. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.; Jia, H.; Qiu, Q.; Lu, Y.; Zhang, J.; Mao, J.; Fan, W.; Huang, M. Typhoon-Induced Fragility Analysis of Transmission Tower in Ningbo Area Considering the Effect of Long-Term Corrosion. Appl. Sci. 2022, 12, 4774. [Google Scholar] [CrossRef]
- Conley, S.; Faloona, I.; Mehrotra, S.; Suard, M.; Suard, M.; Lenschow, D.H.; Sweeney, C.; Herndon, S.; Schwietzke, S.; Pétron, G.; et al. Application of Gauss’s theorem to quantify localized surface emissions from airborne measurements of wind and trace gases. Atmos. Meas. Tech. 2017, 10, 2245–2258. [Google Scholar] [CrossRef]
- Hanlon, T.; Risk, D. Using Computational Fluid Dynamics and Field Experiments to Improve Vehicle-Based Wind Measurements for Environmental Monitoring. Atmos. Meas. Tech. 2020, 13, 191–203. [Google Scholar] [CrossRef]
- Yahaya, S.; Frangi, J.P. Cup Anemometer Response to the Wind Turbulence-Measurement of the Horizontal Wind Variance. Ann. Geophys. 2004, 22, 3363–3374. [Google Scholar] [CrossRef]
- Barbieri, L.; Kral, S.T.; Bailey, S.C.C.; Frazier, A.E.; Jacob, J.D.; Reuder, J.; Brus, D.; Chilson, P.B.; Crick, C.; Detweiler, C.; et al. Intercomparison of Small Unmanned Aircraft System (sUAS) Measurements for Atmospheric Science during the LAPSE-RATE Campaign. Sensors 2019, 19, 2179. [Google Scholar] [CrossRef]
- Thielicke, W.; Hübert, W.; Müller, U.; Eggert, M.; Wilhelm, P. Towards Accurate and Practical Drone-Based Wind Measurements with an Ultrasonic Anemometer. Atmos. Meas. Tech. 2021, 14, 1303–1318. [Google Scholar] [CrossRef]
- Anemoment TriSonica Features. Available online: https://anemoment.com/features/ (accessed on 8 April 2023).
- Airmar 200WX WeatherStation® Instrument Specifications. Available online: https://www.airmar.com/weather-description.html?id=154 (accessed on 7 March 2023).
- Young, R.M. ResponseONE Ultrasonic Anemometer. Available online: https://www.youngusa.com/product/responseone-ultrasonic-anemometer/ (accessed on 7 March 2023).
- Campbell Scientific Wind Speed and Direction. Available online: https://www.campbellsci.com/wind-speed-direction (accessed on 7 March 2023).
- Smith, S.R.; Bourassa, M.A.; Sharp, R.J. Establishing More Truth in True Winds. J. Atmos. Ocean Technol. 1999, 16, 939–952. [Google Scholar] [CrossRef]
- Moore, D.P.; Li, N.P.; Wendt, L.P.; Castañeda, S.R.; Falinski, M.M.; Zhu, J.-J.; Song, C.; Ren, Z.J.; Zondlo, M.A. Underestimation of Sector-Wide Methane Emissions from United States Wastewater Treatment. Environ. Sci. Technol. 2023, 57, 4082–4090. [Google Scholar] [CrossRef] [PubMed]
- Taylor, J.R. An Introduction to Error Analysis: The Study of Uncertainties in Physical Measurements; University Science Books: Herndon, VA, USA, 1996. [Google Scholar]
- Automated Surface Observation Systems. Available online: https://www.weather.gov/asos/ (accessed on 7 March 2023).
- The High-Resolution Rapid Refresh Model. Available online: https://rapidrefresh.noaa.gov/hrrr/ (accessed on 7 March 2023).
- Stull, R. Atmospheric Boundary Layer in: Meteorology: An Algebra-Based Survey of Atmospheric Science; University of British Columbia: Vancouver, BC, Canada, 2023. [Google Scholar]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leibensperger, E.M.; Konieczny, M.; Weil, M.D. Uncertainty in the Mobile Observation of Wind. Atmosphere 2023, 14, 765. https://doi.org/10.3390/atmos14050765
Leibensperger EM, Konieczny M, Weil MD. Uncertainty in the Mobile Observation of Wind. Atmosphere. 2023; 14(5):765. https://doi.org/10.3390/atmos14050765
Chicago/Turabian StyleLeibensperger, Eric M., Mikolaj Konieczny, and Matthew D. Weil. 2023. "Uncertainty in the Mobile Observation of Wind" Atmosphere 14, no. 5: 765. https://doi.org/10.3390/atmos14050765
APA StyleLeibensperger, E. M., Konieczny, M., & Weil, M. D. (2023). Uncertainty in the Mobile Observation of Wind. Atmosphere, 14(5), 765. https://doi.org/10.3390/atmos14050765