
Physics-Informed Neural Network for Flow Prediction Based on Flow Visualization in Bridge Engineering

Abstract
1. Introduction
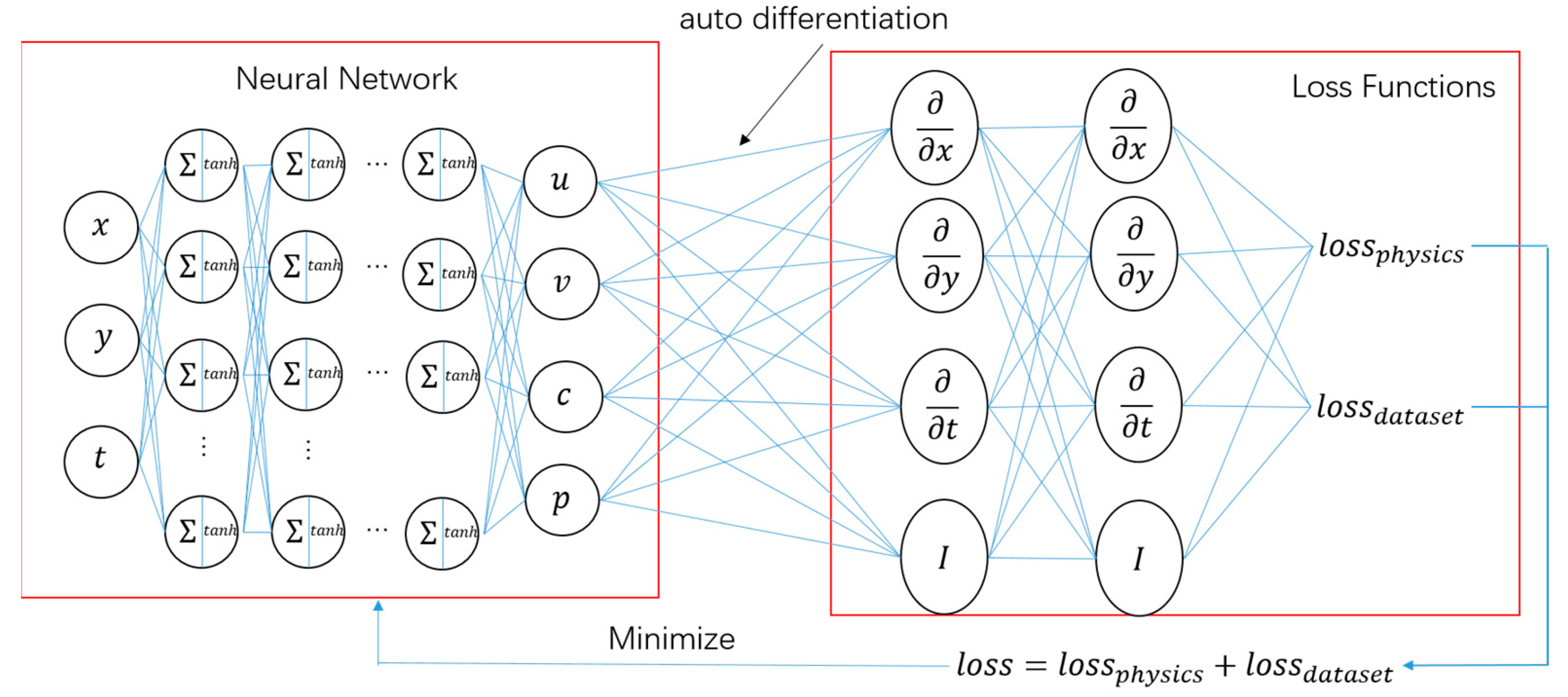
2. Methodology
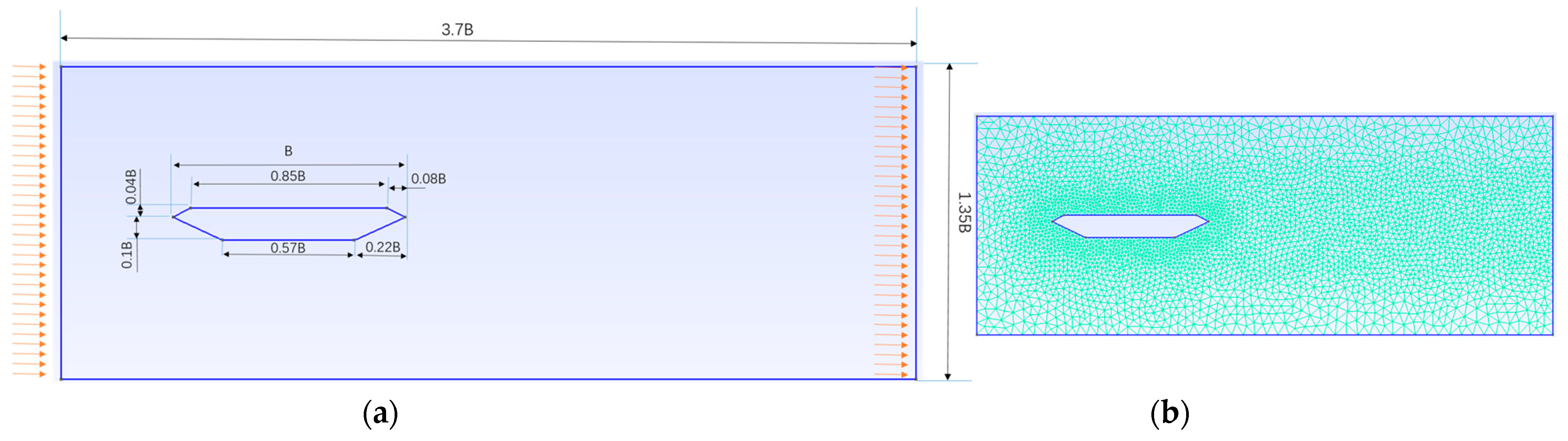
3. Geometry and Boundary Conditions
4. Results
4.1. Dataset
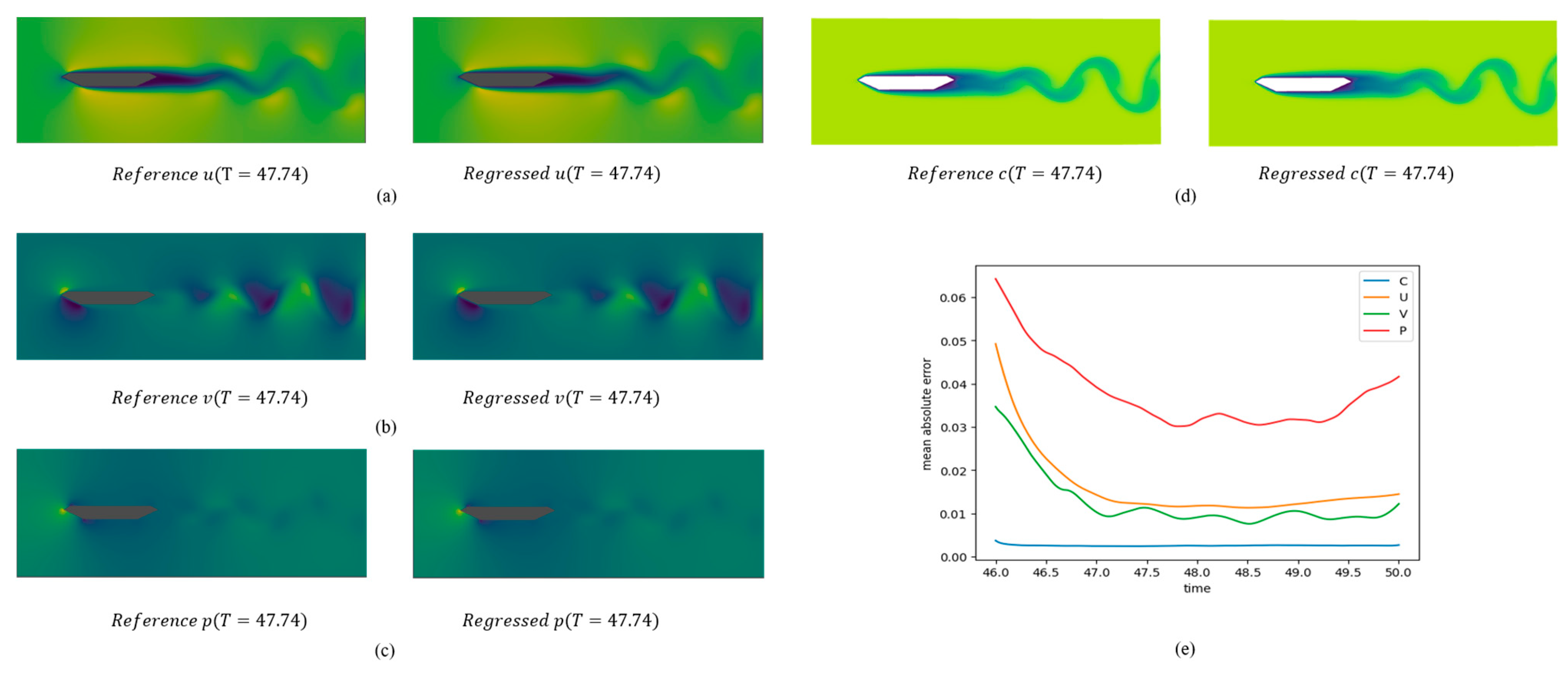
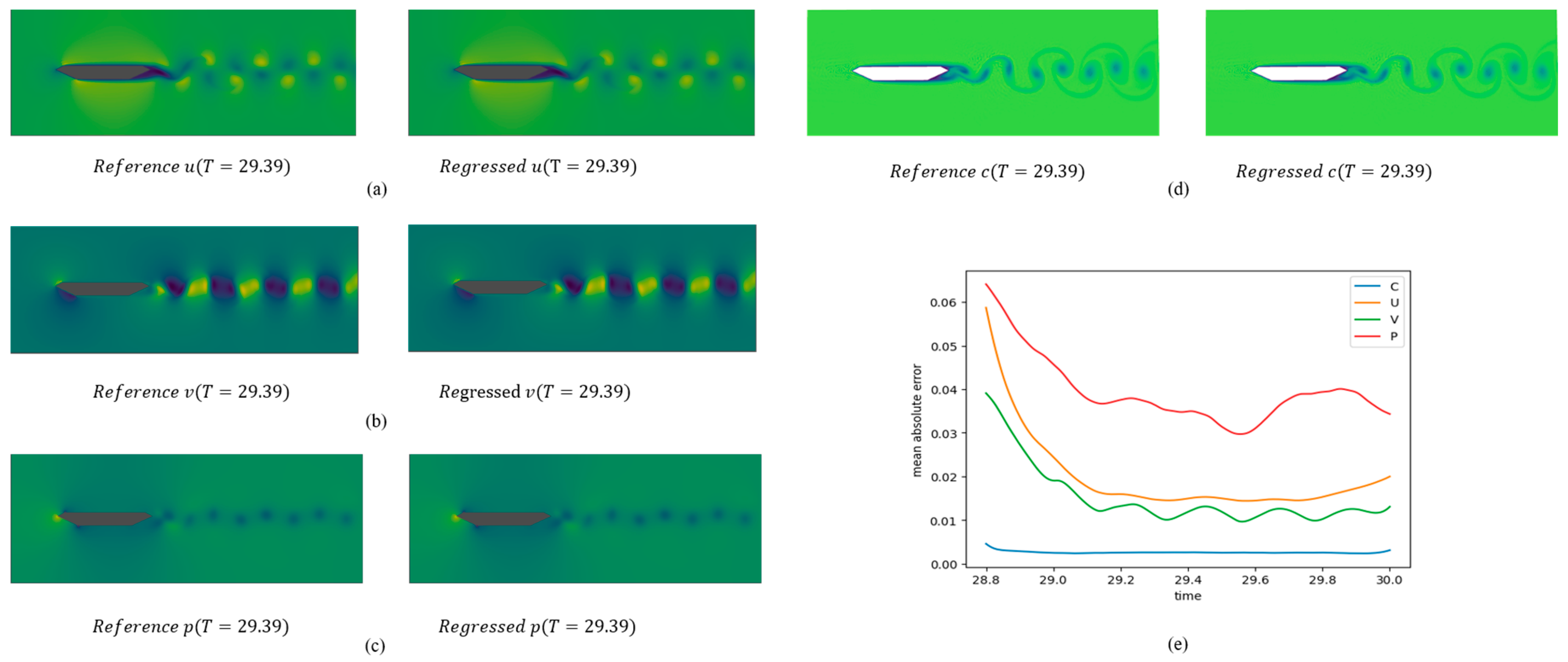
4.2. Flow Field Prediction
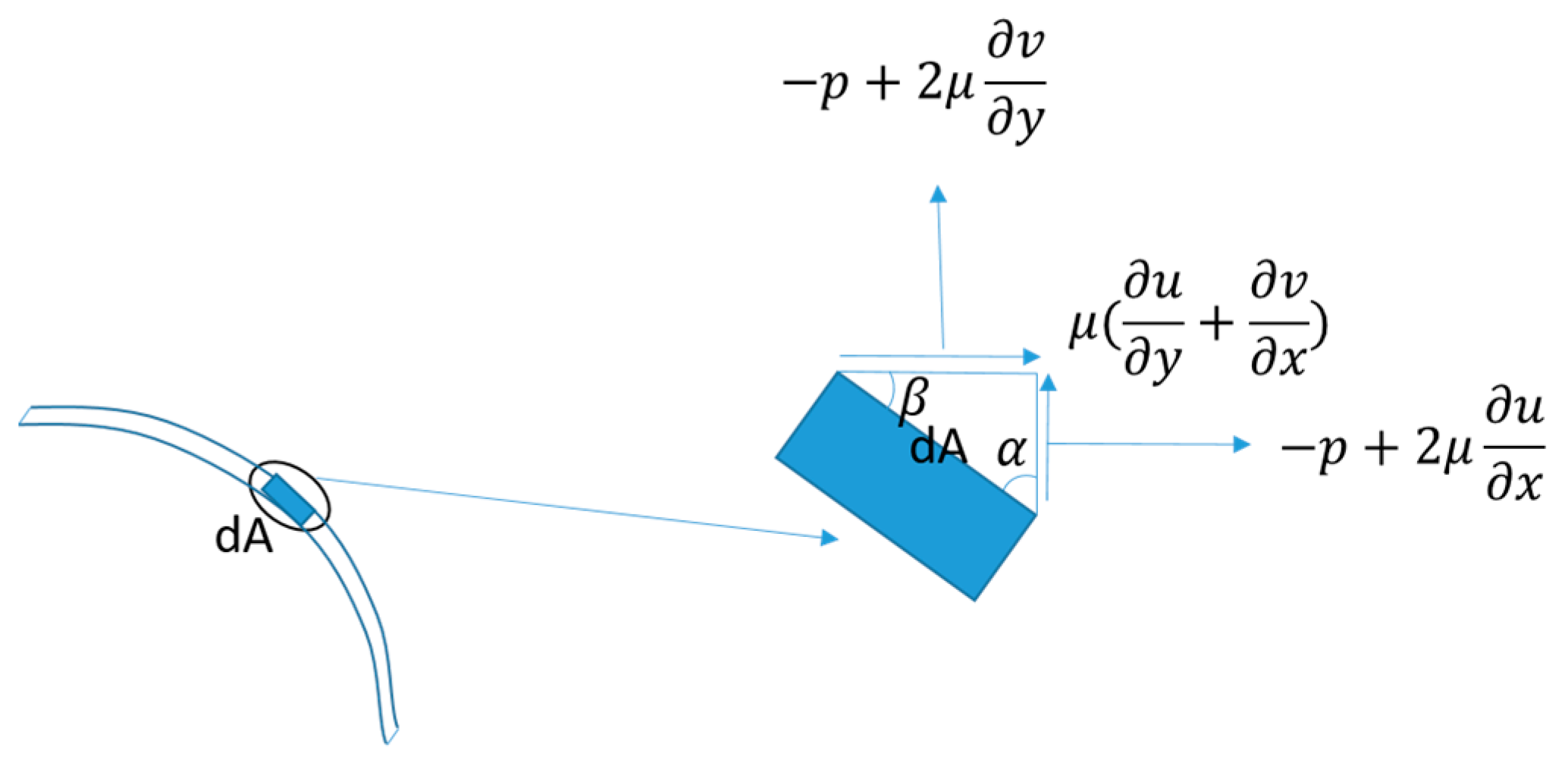
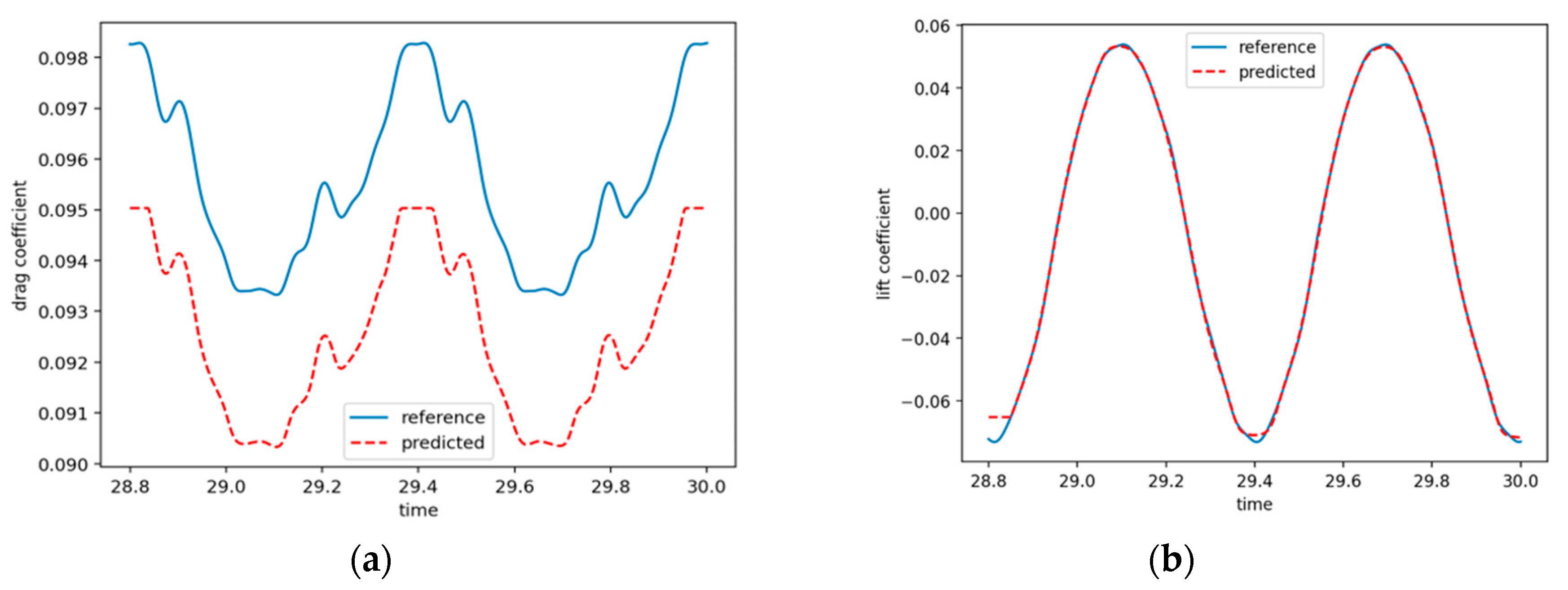
4.3. Prediction of Drag and Lift Coefficients
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, Y.; Fahmy, M.F.; Guan, S.; Pan, Z.; Zhan, Y.; Zhao, T. Properties and applications of FRP cable on long-span cable-supported bridges: A review. Compos. Part B Eng. 2020, 190, 107934. [Google Scholar] [CrossRef]
- Liu, Q.K. Aerodynamic and structure design of multifunction boundary-layer wind tunnel. J. Exp. Fluid Mech. 2011, 25, 66. [Google Scholar]
- Suzuki, M.; Tanemoto, K.; Maeda, T. Aerodynamic characteristics of train/vehicles under cross winds. J. Wind Eng. Ind. Aerodyn. 2003, 91, 209. [Google Scholar] [CrossRef]
- Wu, T.; Kareem, A. Aerodynamics and aeroelasticity of cable-supported bridges: Identification of nonlinear features. J. Eng. Mech. 2013, 139, 1886. [Google Scholar] [CrossRef]
- Xin, D.; Li, H.; Wang, L.; Ou, J. Experimental study on static characteristics of the bridge deck section under simultaneous actions of wind and rain. J. Wind Eng. Ind. Aerodyn. 2012, 107, 17. [Google Scholar] [CrossRef]
- Kwon, S.D.; Lee, H.; Lee, S.; Kim, J. Mitigating the effects of wind on suspension bridge catwalks. J. Bridge Eng. 2013, 18, 624. [Google Scholar] [CrossRef]
- Diana, G.; Rocchi, D.; Belloli, M. Wind tunnel: A fundamental tool for long-span bridge design. Struct. Infrastruct. Eng. 2015, 11, 533. [Google Scholar] [CrossRef]
- Hur, N.; Kim, S.R.; Won, C.S.; Choi, C.K. Wind load simulation for high-speed train stations. J. Wind Eng. Ind. Aerodyn. 2008, 96, 2042. [Google Scholar] [CrossRef]
- Ding, Y.; Zhou, S.X.; Wei, Y.Q.; Yang, T.L.; Dong, J.L. Influence of wind speed, wind direction and turbulence model for bridge hanger: A case study. Symmetry 2021, 13, 1633. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, X.; Chen, Z. Status of the application of turbulence models in CFD simulations of bridge aerodynamic load. Eng. Mech. 2016, 33, 1–8. [Google Scholar]
- Lagaris, I.; Likas, A.; Fotiadis, D. Artificial neural networks for solving ordinary and partial differential equations. IEEE Trans. Neural Netw. 1998, 9, 987–1000. [Google Scholar] [CrossRef] [PubMed]
- Kutz, J.N. Deep learning in fluid dynamics. J. Fluid Mech. 2017, 814, 1–4. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2018, 378, 686–707. [Google Scholar] [CrossRef]
- Raissi, M.; Wang, Z.; Triantafyllou, M.S.; Karniadakis, G.E. Deep learning of vortex-induced vibrations. J. Fluid Mech. 2018, 861, 119–137. [Google Scholar] [CrossRef]
- Fang, Y.; Wu, G.-Z.; Wang, Y.-Y.; Dai, C.-Q. Data-driven femtosecond optical soliton excitations and parameters discovery of the high-order NLSE using the PINN. Nonlinear Dyn. 2021, 105, 603–616. [Google Scholar] [CrossRef]
- Li, J.; Chen, Y. A deep learning method for solving third-order nonlinear evolution equations. Commun. Theor. Phys. 2020, 72, 115003. [Google Scholar] [CrossRef]
- Meng, X.; Li, Z.; Zhang, D.; Karniadakis, G.E. PPINN: Parareal physics-informed neural network for time-dependent PDEs. Comput. Methods Appl. Mech. Eng. 2020, 370, 113250. [Google Scholar] [CrossRef]
- Jagtap, A.D.; Kharazmi, E.; Karniadakis, G.E. Conservative physics-informed neural networks on discrete domains for conservation laws: Applications to forward and inverse problems. Comput. Methods Appl. Mech. Eng. 2020, 365, 113028. [Google Scholar] [CrossRef]
- Kissas, G.; Yang, Y.; Hwuang, E.; Witschey, W.R.; Detre, J.A.; Perdikaris, P. Machine learning in cardiovascular flows modeling: Predicting arterial blood pressure from non-invasive 4D flow MRI data using physics-informed neural networks. Comput. Methods Appl. Mech. Eng. 2020, 358, 112623. [Google Scholar] [CrossRef]
- Raissi, M.; Yazdani, A.; Karniadakis, G.E. Hidden fluid mechanics: Learning velocity and pressure fields from flow visualizations. Science 2020, 367, 1026. [Google Scholar] [CrossRef]
- Sun, L.; Gao, H.; Pan, S.; Wang, J.X. Surrogate modeling for fluid flows based on physics-constrained deep learning without simulation data. Comput. Methods Appl. Mech. Eng. 2020, 361, 112732. [Google Scholar] [CrossRef]
- Zhu, Y.; Zabaras, N.; Koutsourelakis, P.S.; Perdikaris, P. Physics-constrained deep learning for high-dimensional surrogate modeling and uncertainty quantification without labeled data. J. Comput. Phys. 2019, 394, 56. [Google Scholar] [CrossRef]
- Rao, C.; Sun, H.; Liu, Y. Physics-informed deep learning for incompressible laminar flows. Theor. Appl. Mech. Lett. 2020, 10, 207. [Google Scholar] [CrossRef]
- Fournier, D.A.; Skaug, H.J.; Ancheta, J.; Ianelli, J.; Magnusson, A.; Maunder, M.N.; Nielsen, A.; Sibert, J. AD Model Builder: Using automatic differentiation for statistical inference of highly parameterized complex nonlinear models. Optim. Methods Softw. 2012, 27, 233. [Google Scholar] [CrossRef]
- Jin-Guo, L.; Kai-Lai, X. Automatic differentiation and its applications in physics simulation. Acta Phys. Sin. 2021, 70, 149402. [Google Scholar] [CrossRef]
- Masserey, A.; Poirier, J.-R. Optimal control of an induction heating process using automatic differentiation. Int. J. Numer. Methods Eng. 2005, 62, 1721. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Zhu, C.; Byrd, R.H.; Lu, P.; Nocedal, J. Algorithm 778: L-BFGS-B: Fortran subroutines for large-scale bound-constrained optimization. ACM Trans. Math. Softw. (TOMS) 1997, 23, 550. [Google Scholar] [CrossRef]
- Bottou, L. Large-Scale Machine Learning with Stochastic Gradient Descent. In Proceedings of the COMPSTAT’2010 19th International Conference on Computational Statistics, Paris, France, 22–27 August 2010; pp. 177–186. [Google Scholar]
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Zheng, X. TensorFlow: A System for Large-Scale Machine learning. In Proceedings of the 12th USENIX Symposium on Operating Systems Design and Implementation, OSDI 16, Savannah, GA, USA, 2–4 November 2016; pp. 265–283. [Google Scholar]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Chintala, S. Pytorch: An imperative style, high-performance deep learning library. Adv. Neural Inf. Process. Syst. 2019, 32. [Google Scholar]
- Goldstein, R. Fluid Mechanics Measurements, 2nd ed.; Taylor & Francis: Philadelphia, PA, USA, 2017. [Google Scholar] [CrossRef]
- Samimy, M.; Breuer, K.S.; Leal, L.G.; Steen, P.H. (Eds.) A Gallery of Fluid Motion; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar] [CrossRef]
- Settles, G.S. Schlieren and Shadowgraph Techniques: Visualizing Phenomena in Transparent Media; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2001. [Google Scholar] [CrossRef]
- Kirby, R.M.; Sherwin, S.J. Stabilisation of spectral/hp element methods through spectral vanishing viscosity: Application to fluid mechanics modelling. Comput. Methods Appl. Mech. Eng. 2006, 195, 3128. [Google Scholar] [CrossRef]
- Mengaldo, G.; De Grazia, D.; Moxey, D.; Vincent, P.E.; Sherwin, S.J. Dealiasing techniques for high-order spectral element methods on regular and irregular grids. J. Comput. Phys. 2015, 299, 56. [Google Scholar] [CrossRef]
- Bolis, A.; Cantwell, C.D.; Moxey, D.; Serson, D.; Sherwin, S.J. An adaptable parallel algorithm for the direct numerical simulation of incompressible turbulent flows using a Fourier spectral/hp element method and MPI virtual topologies. Comput. Phys. Commun. 2016, 206, 17. [Google Scholar] [CrossRef] [PubMed]
- Baek, H.; Karniadakis, G.E. A convergence study of a new partitioned fluid–structure interaction algorithm based on fictitious mass and damping. J. Comput. Phys. 2012, 231, 629. [Google Scholar] [CrossRef]
- Fujino, Y.; Yoshida, Y. Wind-induced vibration and control of Trans-Tokyo Bay crossing bridge. J. Struct. Eng. 2002, 128, 1012. [Google Scholar] [CrossRef]
- Ehsan, F.; Scanlan, R.H. Vortex-induced vibrations of flexible bridges. J. Eng. Mech. 1990, 116, 1392. [Google Scholar] [CrossRef]
- Li, H.; Laima, S.; Ou, J.; Zhao, X.; Zhou, W.; Yu, Y.; Liu, Z. Investigation of vortex-induced vibration of a suspension bridge with two separated steel box girders based on field measurements. Eng. Struct. 2011, 33, 1894. [Google Scholar] [CrossRef]
- Scanlan, R.; Tomko, J.J. Airfoil and bridge deck flutter derivatives. J. Eng. Mech. Div. 1971, 97, 1717–1737. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| U | |||||||
|---|---|---|---|---|---|---|---|
| 1250 | 1250 | 1/1250 | 1/1250 | 1 | 50 | 1 | 1 |
| 5000 | 5000 | 1/5000 | 1/5000 | 1 | 30 | 1 | 1 |
| Ln | Nn | H | Bc | Lr | Bs | IBs |
|---|---|---|---|---|---|---|
| 10 | 64 | Tanh | Ibc | 0.001 | 10,000 | 2000 |
| Re = Pe = 1250 | 0.0157 | 0.0123 | 0.0375 | 0.0218 |
| Re = Pe = 5000 | 0.0196 | 0.0150 | 0.0394 | 0.0247 |
| Re = Pe = 1250 | Max | Min | ||
|---|---|---|---|---|
| u | 1.3001 | −0.0785 | 0.0157 | 1.14% |
| v | 0.4747 | −0.4182 | 0.0123 | 1.38% |
| p | 0.5175 | −0.5992 | 0.0375 | 3.36% |
| Re = Pe = 5000 | Max | Min | e | |
|---|---|---|---|---|
| u | 1.4644 | −0.3397 | 0.0196 | 1.09% |
| v | 0.6161 | −0.5994 | 0.0150 | 1.23% |
| p | 0.5512 | −0.8768 | 0.0394 | 2.76% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, H.; Wang, Y.; Yan, Y.; Cui, J. Physics-Informed Neural Network for Flow Prediction Based on Flow Visualization in Bridge Engineering. Atmosphere 2023, 14, 759. https://doi.org/10.3390/atmos14040759
Yan H, Wang Y, Yan Y, Cui J. Physics-Informed Neural Network for Flow Prediction Based on Flow Visualization in Bridge Engineering. Atmosphere. 2023; 14(4):759. https://doi.org/10.3390/atmos14040759
Chicago/Turabian StyleYan, Hui, Yaning Wang, Yan Yan, and Jiahuan Cui. 2023. "Physics-Informed Neural Network for Flow Prediction Based on Flow Visualization in Bridge Engineering" Atmosphere 14, no. 4: 759. https://doi.org/10.3390/atmos14040759
APA StyleYan, H., Wang, Y., Yan, Y., & Cui, J. (2023). Physics-Informed Neural Network for Flow Prediction Based on Flow Visualization in Bridge Engineering. Atmosphere, 14(4), 759. https://doi.org/10.3390/atmos14040759