
A Deep Learning Micro-Scale Model to Estimate the CO2 Emissions from Light-Duty Diesel Trucks Based on Real-World Driving


Abstract
:1. Introduction
2. Materials and Methods
2.1. Test Vehicles and Routes
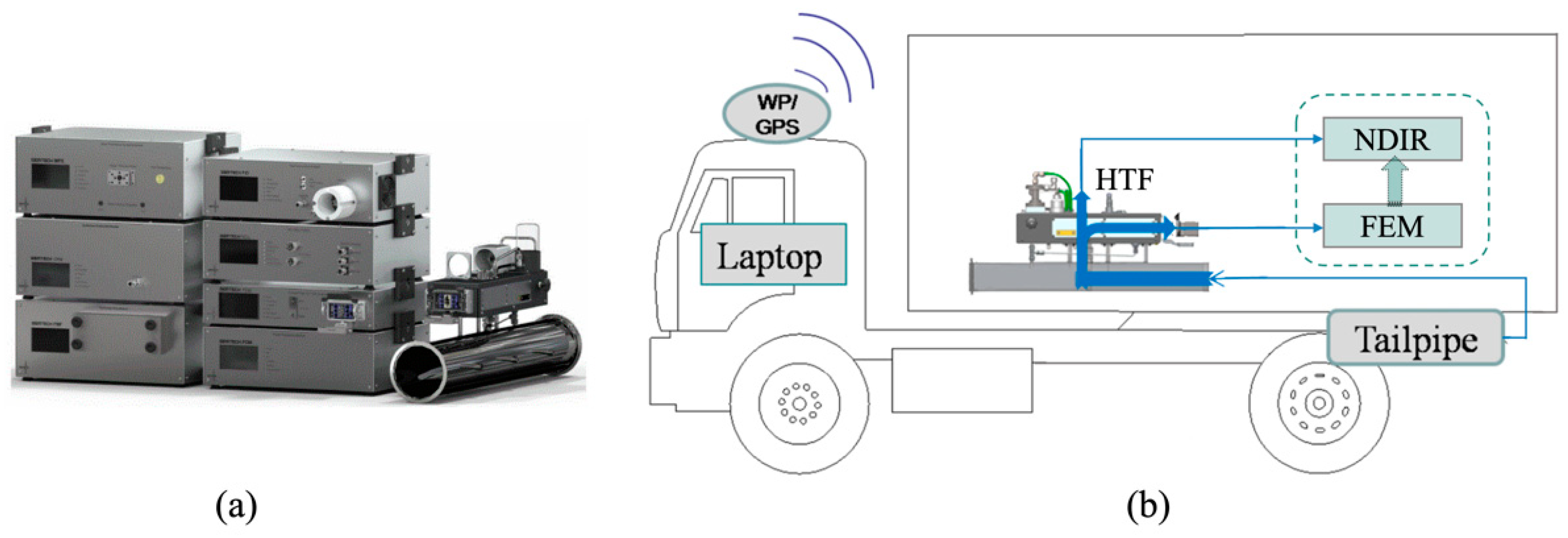
2.2. Test System and Data Analysis
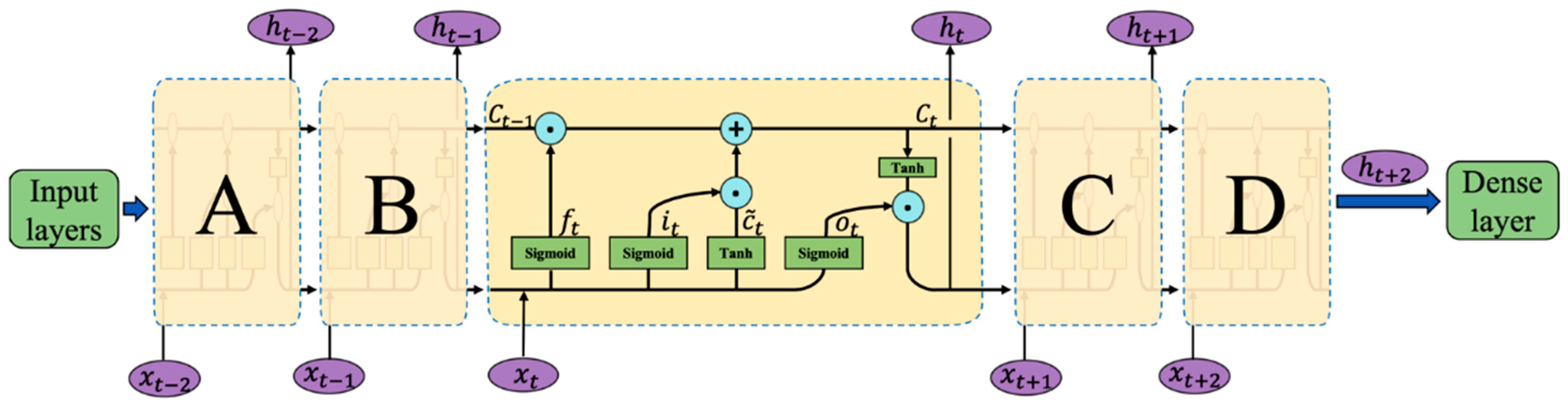
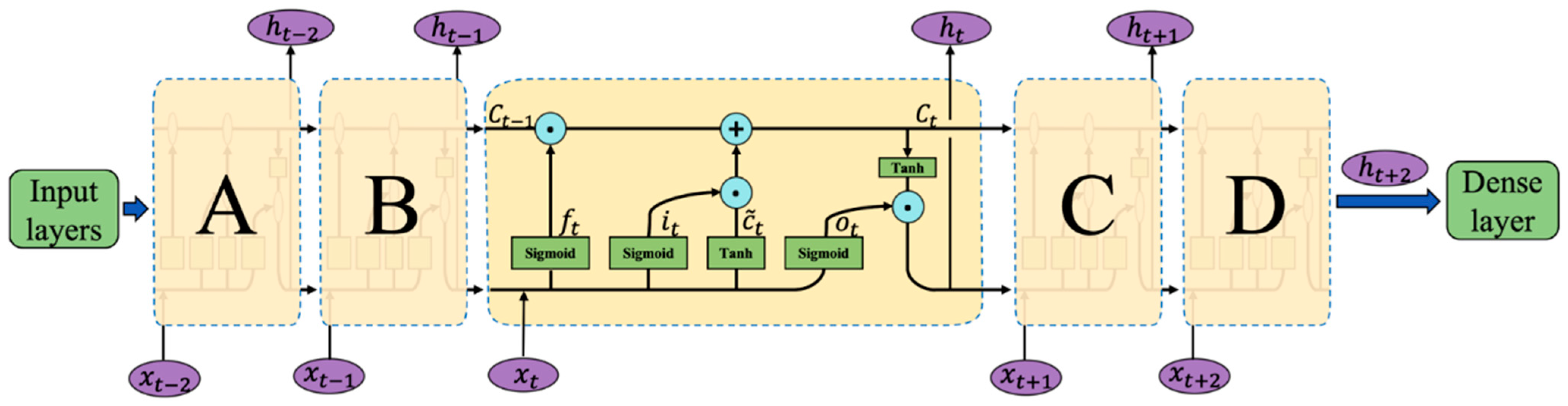
2.3. Deep Learning Model
2.4. Performance Evaluation
3. Results and Discussion
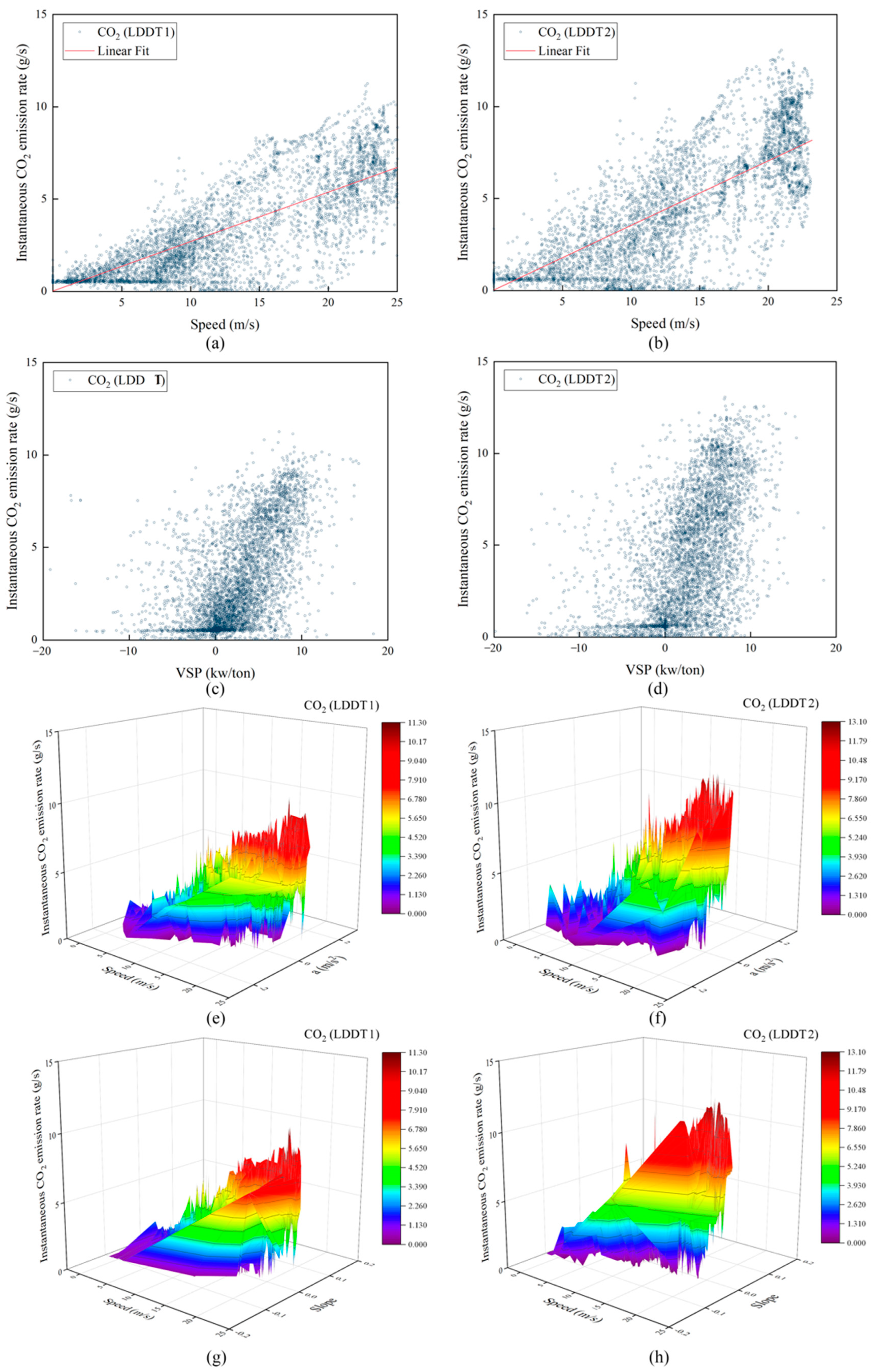
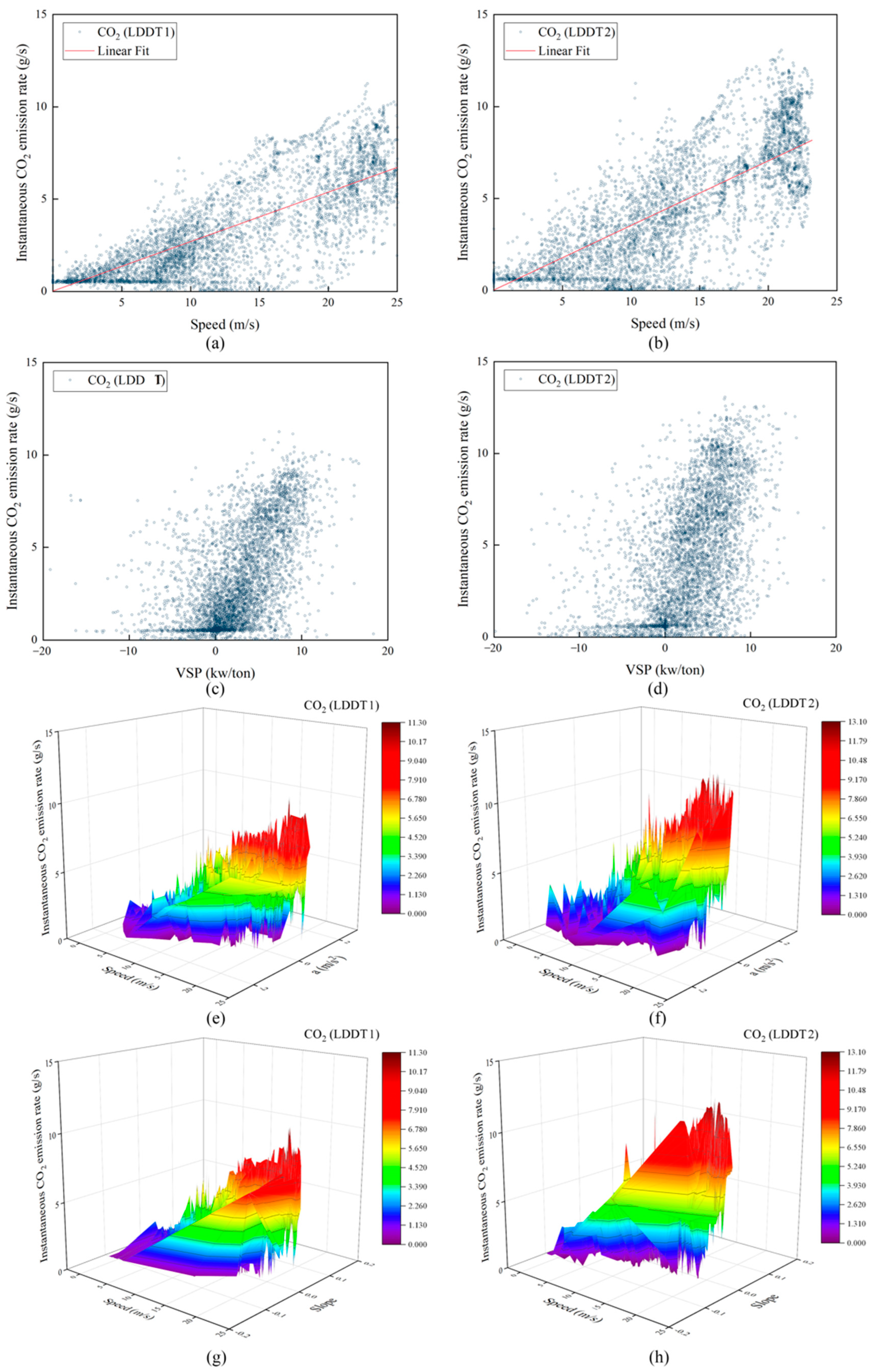
3.1. Impact of Driving Factors on CO2 Emissions
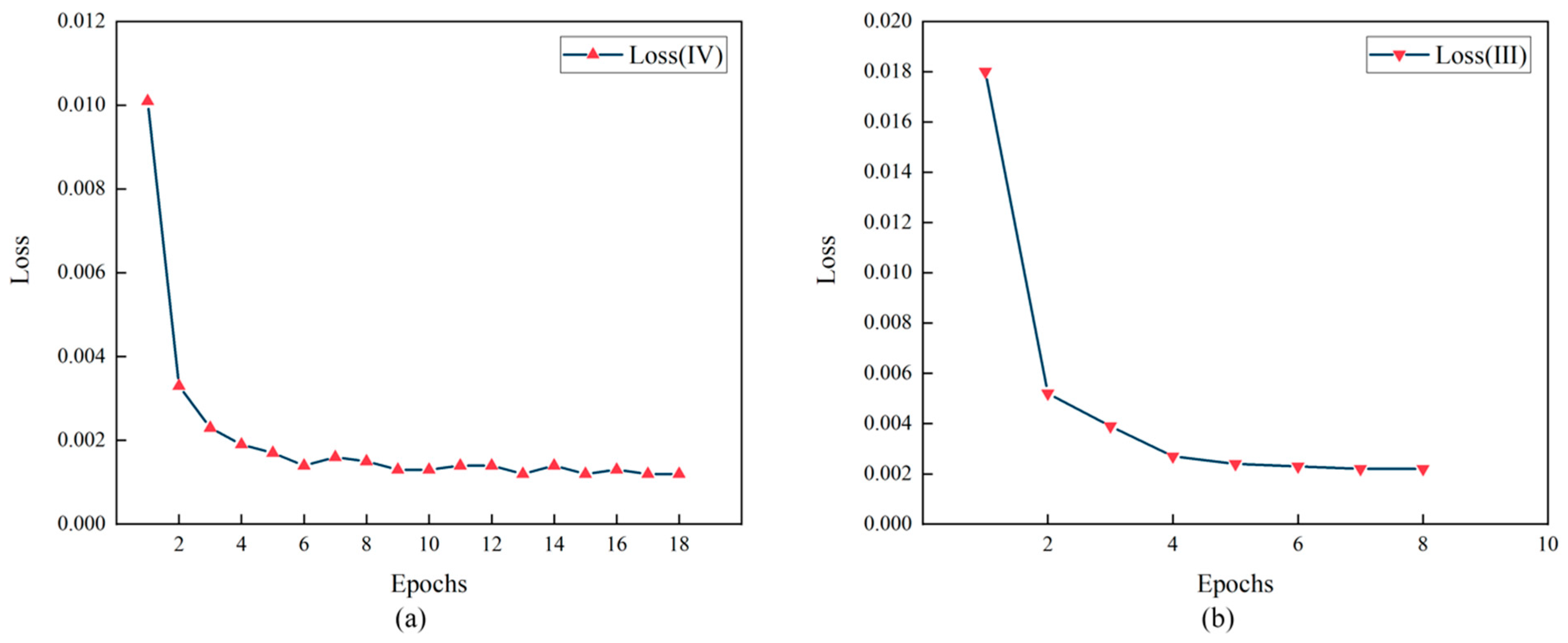
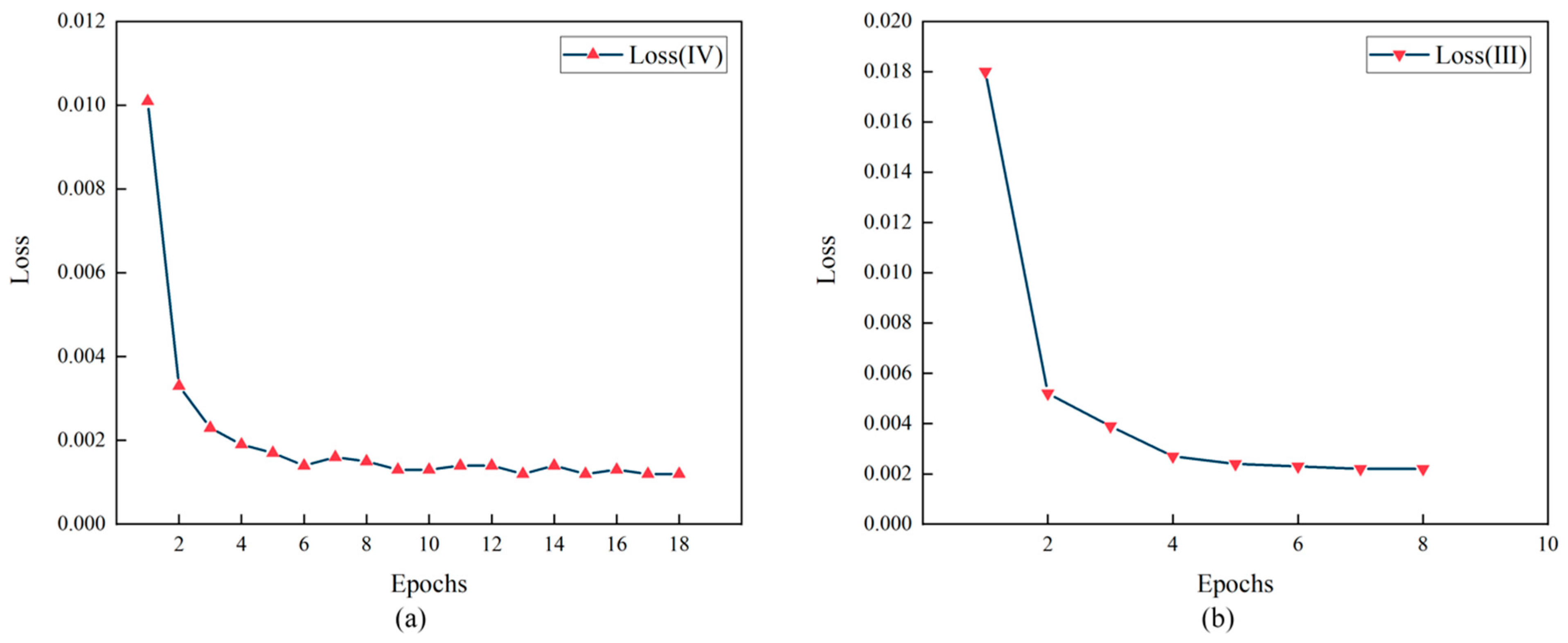
3.2. Model Training
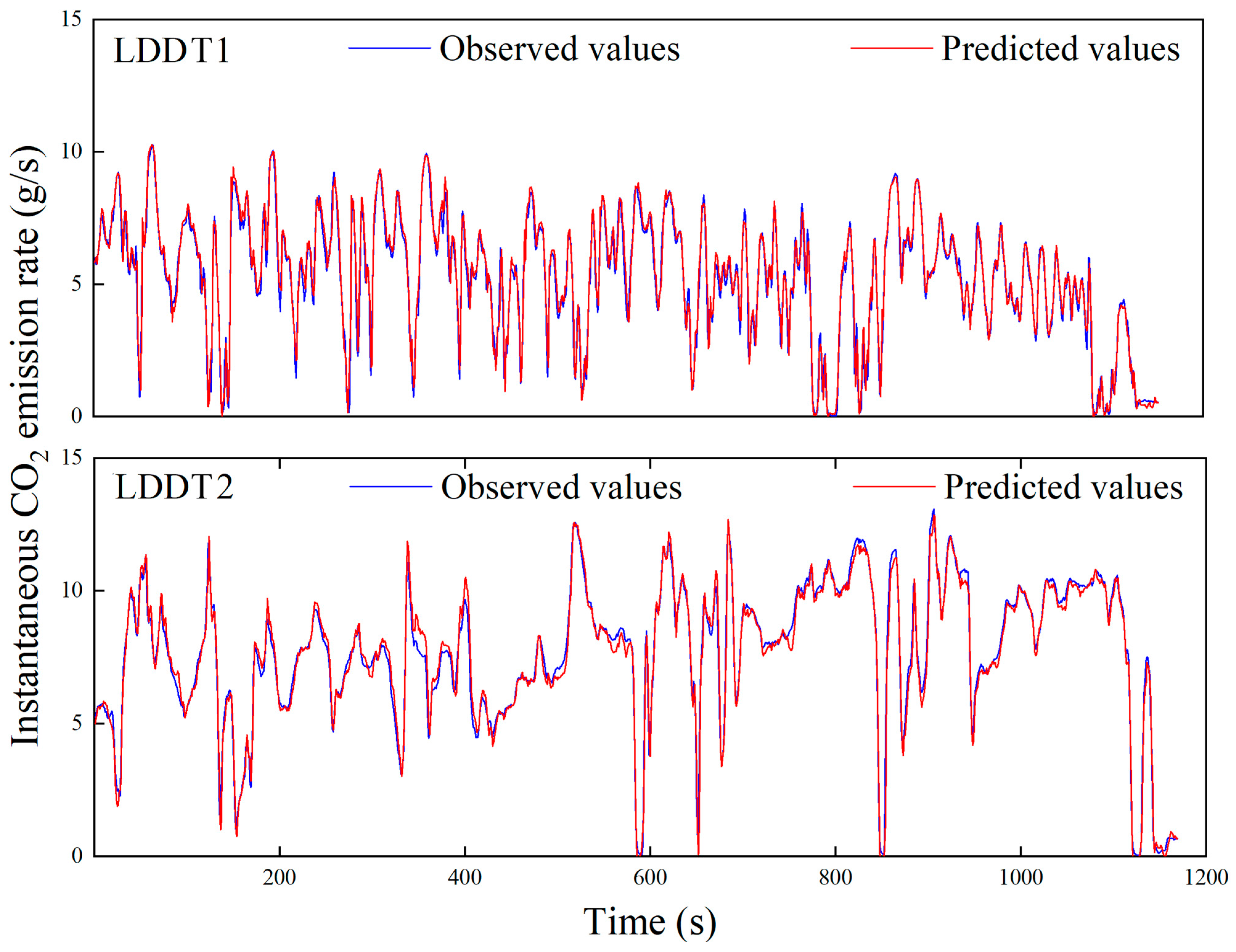
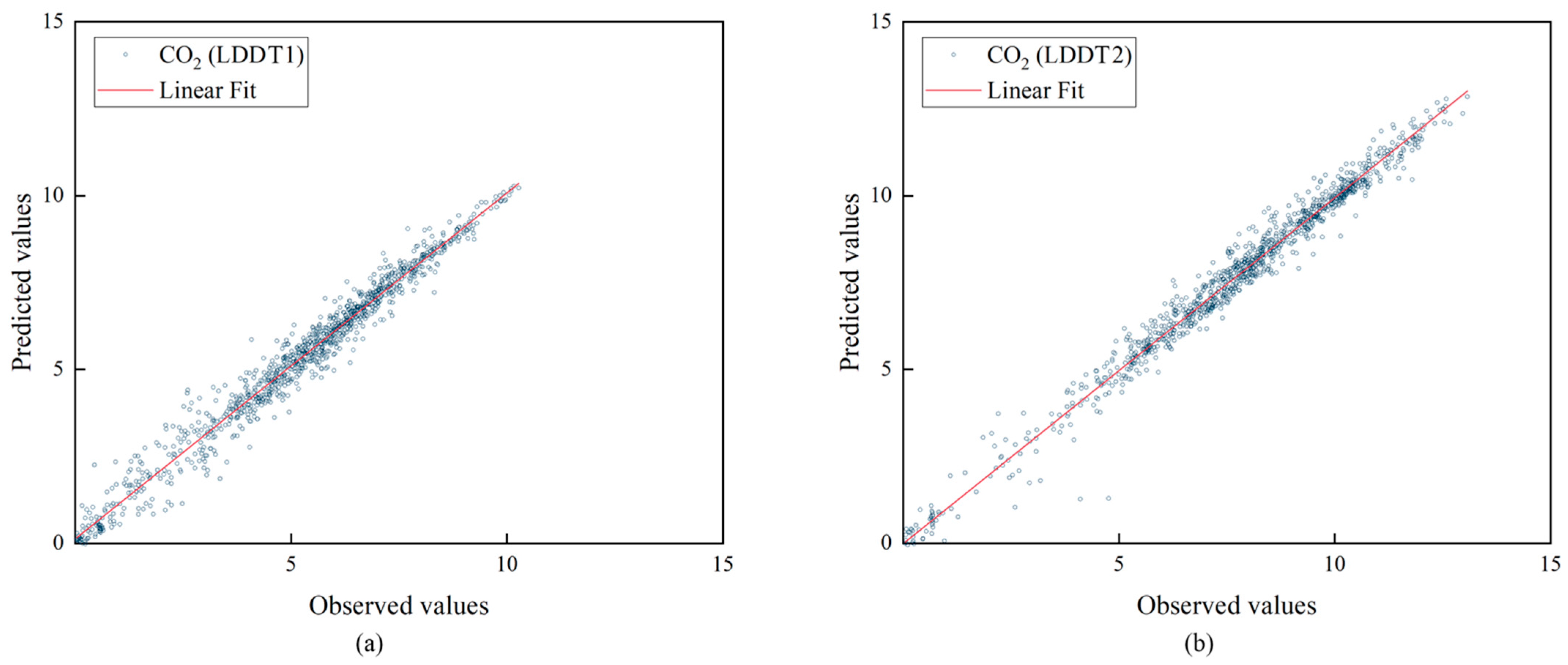
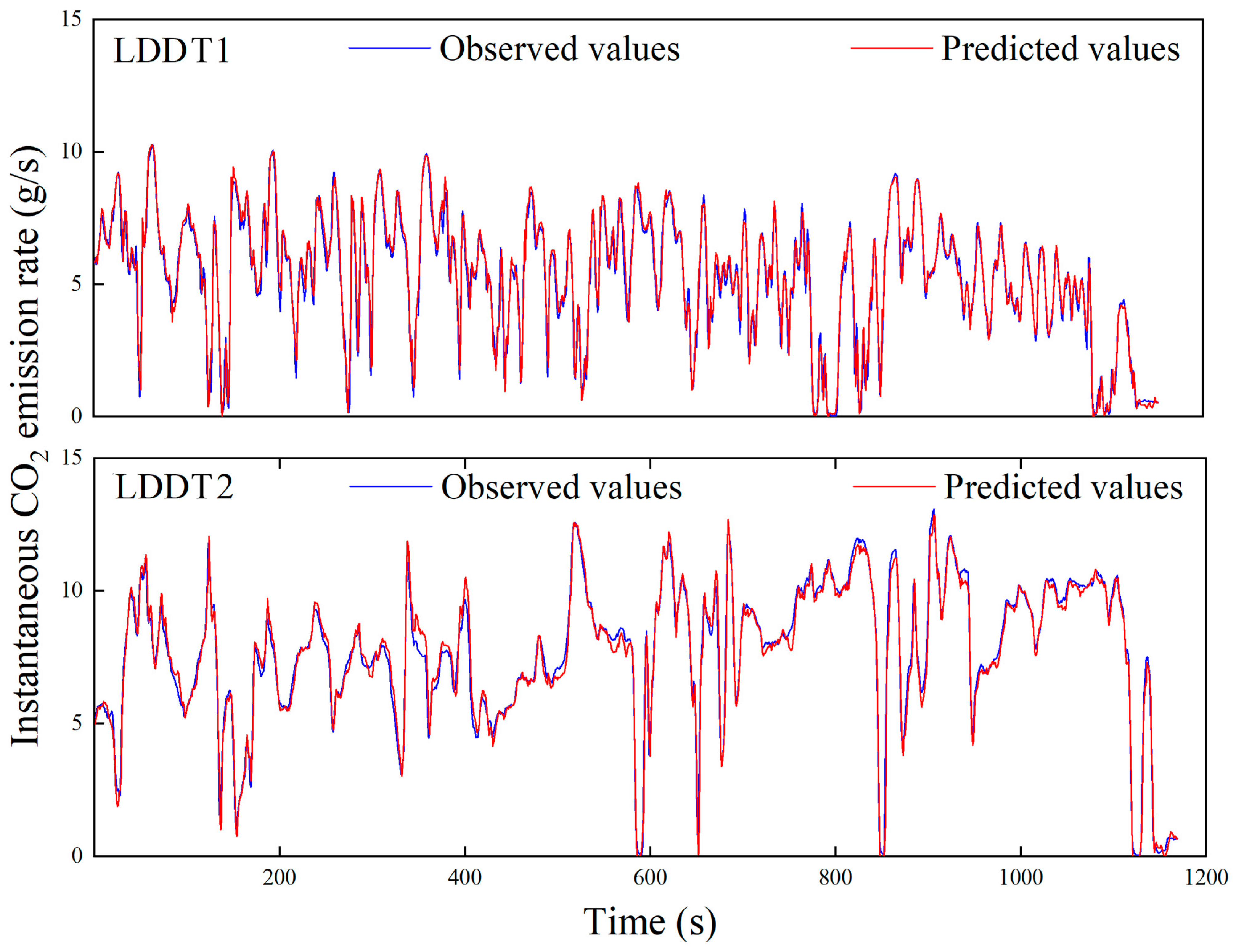
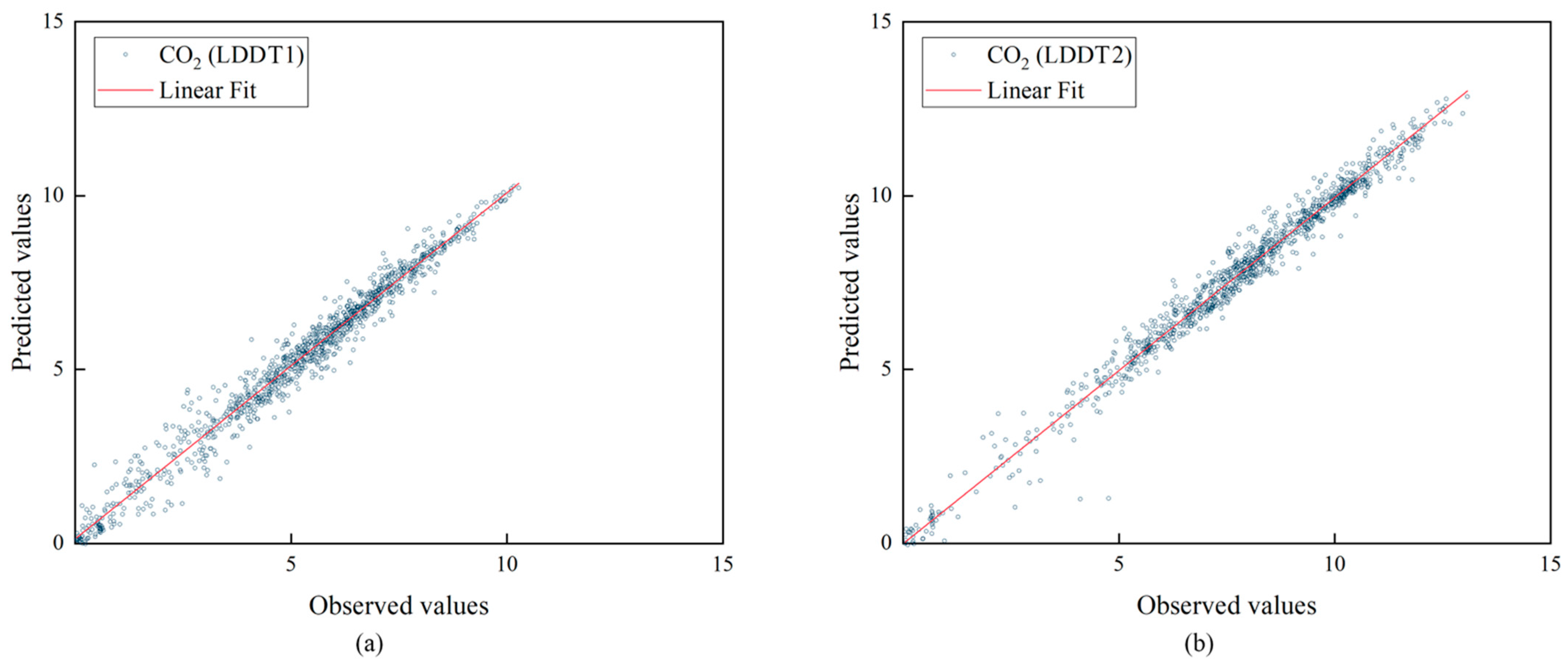
3.3. Model Validation and Discussion
4. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, L.; Wang, D.; Li, Y. Single-atom Catalysis for Carbon Neutrality. Carbon Energy 2022, 1–59. [Google Scholar] [CrossRef]
- Smith, I.M. CO2 and Climatic Change: An Overview of the Science. Energy Convers. Manag. 1993, 34, 729–735. [Google Scholar] [CrossRef]
- Liu, A.; Chen, Y.; Cheng, X. Social Cost of Carbon under a Carbon-Neutral Pathway. Environ. Res. Lett. 2022, 17, 054031. [Google Scholar] [CrossRef]
- Ma, X.; Huang, G.; Cao, J. The Significant Roles of Anthropogenic Aerosols on Surface Temperature under Carbon Neutrality. Sci. Bull. 2022, 67, 470–473. [Google Scholar] [CrossRef]
- Oh, Y.; Park, J.; Lee, J.T.; Seo, J.; Park, S. Estimation of CO2 Reduction by Parallel Hard-Type Power Hybridization for Gasoline and Diesel Vehicles. Sci. Total Environ. 2017, 595, 2–12. [Google Scholar] [CrossRef]
- Chong, H.S.; Park, Y.; Kwon, S.; Hong, Y. Analysis of Real Driving Gaseous Emissions from Light-Duty Diesel Vehicles. Transp. Res. Part D Transp. Environ. 2018, 66, 485–499. [Google Scholar] [CrossRef]
- Spreen, J.S.; Kadijk, G.; Vermeulen, R.J.; Heijne, V.; Ligterink, N.; Stelwagen, U.; Smokers, R.T.M.; van der Mark, P. Assessment of Road Vehicfle Emissions: Methodology of the Dutch in-Service Testing Programmes. 2016. Available online: https://policycommons.net/artifacts/2180021/assessment-of-road-vehicle-emissions/2935998/ (accessed on 7 September 2022).
- Liu, Z.; Li, L.; Zhang, Y.-J. Investigating the CO2 Emission Differences among China’s Transport Sectors and Their Influencing Factors. Nat. Hazards 2015, 77, 1323–1343. [Google Scholar] [CrossRef]
- Teng, W.; Zhang, Q.; Liu, F.; Ying, G. The Progress in the Research on Estimation of Vehicle Carbon Emission in China. J. South China Norm. Univ. (Nat. Sci. Ed.) 2022, 54, 83–92. (In Chinese) [Google Scholar]
- Matteo, B.; Nanni, M.; Pappalardo, L. Gross Polluters and Vehicle Emissions Reduction. Nat. Sustain. 2022, 5, 699–707. [Google Scholar]
- Emrah, D.; Bektaş, T.; Laporte, G. A Review of Recent Research on Green Road Freight Transportation. Eur. J. Oper. Res. 2014, 237, 775–793. [Google Scholar]
- Marina, K.; Fontaras, G.; Ntziachristos, L.; Bonnel, P.; Samaras, Z.; Dilara, P. Use of Portable Emissions Measurement System (PEMS) for the Development and Validation of Passenger Car Emission Factors. Atmos. Environ. 2013, 64, 329–338. [Google Scholar]
- Delia, A.; Weilenmann, M.; Soltic, P. Towards Accurate Instantaneous Emission Models. Atmos. Environ. 2005, 39, 2443–2449. [Google Scholar]
- Hao, L.; Hao, C.; Ji, L.; Yin, H.; Zhang, W.; Wang, X.; Liu, J. Statistical Modeling of Exhaust Emissions from Gasoline Passenger Cars. J. Beijing Inst. Technol. 2021, 30, 52–63. [Google Scholar]
- He, Z.; Zhang, W.; Jia, N. Estimating Carbon Dioxide Emissions of Freeway Traffic: A Spatiotemporal Cell-Based Model. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1–11. [Google Scholar] [CrossRef]
- Michail, M.; Mattas, K.; Mogno, C.; Ciuffo, B.; Fontaras, G. The Impact of Automation and Connectivity on Traffic Flow and CO2 Emissions. A Detailed Microsimulation Study. Atmos. Environ. 2020, 226, 117399. [Google Scholar]
- Christina, Q.; Borge, R.; Pérez, J.; Lumbreras, J.; de la Paz, D.; de Andrés, J.M. Microscale Traffic Simulation and Emission Estimation in a Heavily Trafficked Roundabout in Madrid (Spain). Sci. Total Environ. 2016, 566–567, 416–427. [Google Scholar]
- Tao, J.; Zhang, P.; Chen, B. A Microscopic Model of Vehicle CO2 Emissions Based on Deep Learning—A Spatiotemporal Analysis of Taxicabs in Wuhan, China. IEEE Trans. Intell. Transp. Syst. 2022, 1–10. [Google Scholar] [CrossRef]
- Jigu, S.; Yun, B.; Park, J.; Park, J.; Shin, M.; Park, S. Prediction of Instantaneous Real-World Emissions from Diesel Light-Duty Vehicles Based on an Integrated Artificial Neural Network and Vehicle Dynamics Model. Sci. Total Environ. 2021, 786, 147359. [Google Scholar]
- Jian, H.; Wang, Y.; Liu, Z.; Guan, B.; Long, D.; Du, X. On Modeling Microscopic Vehicle Fuel Consumption Using Radial Basis Function Neural Network. Soft Comput. 2015, 20, 2771–2779. [Google Scholar]
- U.S. Environmental Protection Agency. Comprehensive Modal Emissions Model (CMEM) Version 2.0: User’ S Guide; U.S. Environmental Protection Agency: Washington, DC, USA, 2004. [Google Scholar]
- University of California at Riverside. IVE Model User’ S Manual Version 1.1.1.; University of California at Riverside: Riverside, CA, USA, 2004. [Google Scholar]
- U.S. Environmental Protection Agency. S. Environmental Protection Agency. Technical Guidance on the Use of MOVES2010 for Emission Inventory Preparation in State Implementation Plans and Transportation Conformity; U.S. Environmental Protection Agency: Washington, DC, USA, 2010. [Google Scholar]
- Jigu, S.; Yun, B.; Kim, J.; Shin, M.; Park, S. Development of a Cold-Start Emission Model for Diesel Vehicles Using an Artificial Neural Network Trained with Real-World Driving Data. Sci. Total Environ. 2021, 806, 151347. [Google Scholar]
- Zhong, S.; Zhang, K.; Bagheri, M.; Burken, J.G.; Gu, A.; Li, B.; Ma, X.; Marrone, B.L.; Ren, Z.J.; Schrier, J.; et al. Machine Learning: New Ideas and Tools in Environmental Science and Engineering. Environ. Sci. Technol. 2021, 55, 12741–12754. [Google Scholar] [CrossRef]
- Junepyo, C.; Park, J.; Lee, H.; Chon, M.S. A Study of Prediction Based on Regression Analysis for Real-World CO2 Emissions with Light-Duty Diesel Vehicles. Int. J. Automot. Technol. 2021, 22, 569–577. [Google Scholar]
- Maksymilian, M.; Jaworski, A.; Kuszewski, H.; Woś, P.; Campisi, T.; Lew, K. The Development of CO2 Instantaneous Emission Model of Full Hybrid Vehicle with the Use of Machine Learning Techniques. Energies 2021, 15, 142. [Google Scholar]
- Hashemi, N.; Clark, N.N. Artificial Neural Network as a Predictive Tool for Emissions from Heavy-Duty Diesel Vehicles in Southern California. Int. J. Engine Res. 2007, 8, 321–336. [Google Scholar] [CrossRef]
- Pai, P.S.; Rao, B.S. Artificial Neural Network Based Prediction of Performance and Emission Characteristics of a Variable Compression Ratio CI Engine Using WCO as a Biodiesel at Different Injection Timings. Appl. Energy 2011, 88, 2344–2354. [Google Scholar]
- Cai, M.; Yin, Y.; Xie, M. Prediction of Hourly Air Pollutant Concentrations near Urban Arterials Using Artificial Neural Network Approach. Transp. Res. Part D Transp. Environ. 2009, 14, 32–41. [Google Scholar] [CrossRef]
- Jaikumar, R.; Nagendra, S.S.; Sivanandan, R. Modeling of Real Time Exhaust Emissions of Passenger Cars Under heterogeneous Traffic Conditions. Atmos. Pollut. Res. 2016, 8, 80–88. [Google Scholar] [CrossRef]
- Hamrani, A.; Akbarzadeh, A.; Madramootoo, C.A. Machine Learning for Predicting Greenhouse Gas Emissions from Agricultural Soils. Sci. Total Environ. 2020, 741, 140338. [Google Scholar] [CrossRef]
- Yu, Y.; Wang, Y.; Li, J.; Fu, M.; Shah, A.N.; He, C. A Novel Deep Learning Approach to Predict the Instantaneous NOx Emissions from Diesel Engine. IEEE Access 2021, 9, 11002–11013. [Google Scholar] [CrossRef]
- Mei, H.; Wang, L.; Wang, M.; Zhu, R.; Wang, Y.; Li, Y.; Zhang, R.; Wang, B.; Bao, X. Characterization of Exhaust CO, HC and NOx Emissions from Light-Duty Vehicles under Real Driving Conditions. Atmosphere 2021, 12, 1125. [Google Scholar] [CrossRef]
- Chong, H.; Kwon, S.; Lim, Y.; Lee, J. Real-World Fuel Consumption, Gaseous Pollutants, and CO2 Emission of Light-Duty Diesel Vehicles. Sustain. Cities Soc. 2019, 53, 101925. [Google Scholar] [CrossRef]
- Gallus, J.; Kirchner, U.; Vogt, R.; Benter, T. Impact of Driving Style and Road Grade on Gaseous Exhaust Emissions of Passenger Vehicles Measured by a Portable Emission Measurement System (PEMS). Transp. Res. Part D Transp. Environ. 2017, 52, 215–226. [Google Scholar] [CrossRef]
- Boroujeni, B.Y.; Frey, H.C.; Sandhu, G.S. Road Grade Measurement Using in-Vehicle, Stand-Alone GPS with Barometric Altimeter. J. Transp. Eng. 2013, 139, 605–611. [Google Scholar] [CrossRef]
- Jiménez-Palacios, L. Understanding and Quantifying Motor Vehicle Emissions with Vehicle Specific Power and TILDAS Remote Sensing. 2009. Available online: http://cires1.colorado.edu/jimenez/Papers/Jimenez_PhD_Thesis.pdf (accessed on 7 September 2022).
- Zhang, Y.; Zhou, R.; Peng, S.; Mao, H.; Yang, Z.; Andre, M.; Zhang, X. Development of Vehicle Emission Model Based on Real-Road Test and Driving Conditions in Tianjin, China. Atmosphere 2022, 13, 595. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Label | Batch-Size | Epochs | Optimizer |
|---|---|---|---|
| LDDT1 | 8 | 18 | Adam |
| LDDT2 | 8 | 8 | Adam |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, R.; Wang, Y.; Pang, Y.; Zhang, B.; Wei, Y.; Wang, M.; Zhu, R. A Deep Learning Micro-Scale Model to Estimate the CO2 Emissions from Light-Duty Diesel Trucks Based on Real-World Driving. Atmosphere 2022, 13, 1466. https://doi.org/10.3390/atmos13091466
Zhang R, Wang Y, Pang Y, Zhang B, Wei Y, Wang M, Zhu R. A Deep Learning Micro-Scale Model to Estimate the CO2 Emissions from Light-Duty Diesel Trucks Based on Real-World Driving. Atmosphere. 2022; 13(9):1466. https://doi.org/10.3390/atmos13091466
Chicago/Turabian StyleZhang, Rongshuo, Yange Wang, Yujie Pang, Bowen Zhang, Yangbing Wei, Menglei Wang, and Rencheng Zhu. 2022. "A Deep Learning Micro-Scale Model to Estimate the CO2 Emissions from Light-Duty Diesel Trucks Based on Real-World Driving" Atmosphere 13, no. 9: 1466. https://doi.org/10.3390/atmos13091466
APA StyleZhang, R., Wang, Y., Pang, Y., Zhang, B., Wei, Y., Wang, M., & Zhu, R. (2022). A Deep Learning Micro-Scale Model to Estimate the CO2 Emissions from Light-Duty Diesel Trucks Based on Real-World Driving. Atmosphere, 13(9), 1466. https://doi.org/10.3390/atmos13091466